

چکیده
مدلهای ارتفاعی دیجیتال با وضوح بالا (HR-DEMs) که از ابرهای نقطهای اسکن لیزری هوابرد (ALS) نشات میگیرند، باید برای تحلیل هیدرولوژیکی و ژئومورفولوژیکی به DEMهای اصلاحشده با Culvert تبدیل شوند. برای تولید یک DEM اصلاح شده با پلک، اطلاعات در مورد مکان های سازه های زهکشی (DSs) (به عنوان مثال، پل ها و پلک ها) ضروری است. با این وجود، تکنیکهای نقشهبرداری DS، چه در ارتباط با توسعه روشهای جدید یا یک تنظیم کاربردی از روشهای موجود، همیشه پیچیده بودهاند. در نتیجه، دادههای DS منطقه وسیع نادر هستند، و تولید یک DEM اصلاحشده با پلک در ظرفیت منطقه وسیع را چالشبرانگیز میسازد. روش دیگر، روش الگوریتم نقض (BA) یک روش استاندارد برای به دست آوردن DEM های اصلاح شده با پلک در غیاب داده های DS است که تا حدودی مشکل را حل می کند.2در ورمونت آمریکا داده های معیار DS به عنوان یک مرجع استاندارد برای ارزیابی عملکرد روش DSMA در مقایسه با روش BA استفاده می شود. یک چارچوب روششناختی منسجم برای به دست آوردن یک DEM اصلاحشده با پلک با استفاده از دادههای DS، ترسیم شده با استفاده از DSMA و DEM اصلاحشده با آبگذر بهترتیب با روش BA مقایسه میشود. DSهای یافت شده از DEM های اصلاح شده با پلک به صورت مثبت واقعی (TP)، مثبت کاذب (FP) و منفی کاذب (FN) گزارش شدند. بر اساس TP، FP، و FN که از DEM های اصلاح شده با پلک هر دو روش سرچشمه می گیرند، معیارهای ارزیابی نرخ مثبت کاذب (FPR) (یعنی خطای کمیسیون) و نرخ منفی کاذب (FNR) (یعنی خطای حذف ) محاسبه شدند. ارزیابی ما نشان داد که دادههای DS مبتنی بر DSMA به تازگی توسعهیافته منجر به FPR 0.05 با جادههای مقامات بزرگراه فدرال (FHWA) و 0 شد. 12 با جاده های غیر FHWA. FNR با جاده های FHWA 0.07 و با جاده های غیر FHWA 0.38 بود. روش BA FPR 0.28 را با جاده های FHWA و 0.62 را با جاده های غیر FHWA نشان داد. به طور مشابه، FNR برای روش BA 0.32 با جاده های FHWA و 0.61 با جاده های غیر FHWA بود. آمارهای مبتنی بر FPR و FNR نشان داد که DEM اصلاحشده با پلک مبتنی بر DSMA در مقایسه با روش BA دقیقتر بود، و چارچوب فرمولبندیشده برای تولید DEMهای اصلاحشده با پلک با استفاده از دادههای DS مبتنی بر DSMA قویتر بود.
کلید واژه ها:
پل ; پلک ; ابرهای نقطه ALS ; الگوریتم ها DSMA ; الگوریتم نقض ; DEM
1. مقدمه
مدلهای ارتفاعی دیجیتال با وضوح بالا (DEM) که فرآیندهای اساسی سطح زمین را رمزگشایی میکنند، مکرر مورد استفاده قرار میگیرند و از ابرهای سهبعدی (3 بعدی) اندازهگیریهای نقطه لیزری بهدست میآیند، که شامل نرخهای نمونهبرداری متراکم (مثلاً 230 لیزر برگشتی از 1 است. متر مربع مساحت ) [ 1 ، 2 ]. فناوری اسکن لیزری هوابرد (ALS) دقت افقی و عمودی بالاتری را در محدوده 10 تا 15 سانتی متر نشان داده است، و با نفوذ از سایبان ها، توپوگرافی پنهان در زیر جنگل ها را رمزگشایی می کند [ 3 ، 4 ].]. ابرهای نقطهای ALS – نقاط زمینی ALS (مثلاً بازده لیزر زمین برهنه) بهویژه – به ایجاد HR-DEM در فاصلهی نمونهبرداری زمینی (GSD) تعریفشده توسط کاربر (مثلاً 1 متر) اجازه میدهد، که نمایش سطح زمین را در چندین مقیاس ممکن میسازد. از طریق چندین نوع HR-DEM [ 5 ، 6 ]. یک HR-DEM میتواند انواع خاصی را که در آن هر گونه در یک محیط کاربردی خاص هدف متفاوتی را انجام میدهد، اتخاذ کند [ 7 ]. به عنوان مثال، نقاط زمینی اسکن لیزری هوابرد (ALS) برای ایجاد یک HR-DEM، رمزگشایی سطح زمین برای اهداف نقشهبرداری (مثلاً برنامهریزی شهری و تهیه نقشههای کانتور) درون یابی میشوند. .]. در عین حال، در محیط کاربردی هیدرولوژی و ژئومورفولوژی، پردازش HR-DEM باید با ترکیب برخی از داده های اضافی و در عین حال مهم مانند سازه های زهکشی (DSs) (به عنوان مثال، پل ها و پلک ها) انجام شود تا جریان های آب (مانند رودخانه ها و… نهرها) و حوزه های آبخیز را می توان به دقت ترسیم کرد [ 9 ]. چنین نوع HR-DEM در بسیاری از نقاط جهان به عنوان یک DEM با نیروی هیدرولیک یا DEM صحیح هیدرولوژیکی (HC-DEM) شناخته می شود [ 10 ، 11 ] و به ویژه، یک DEM اصلاح شده با پلک برای زمین شناسی ایالات متحده. بررسی (USGS) [ 12 ]. در ادامه مقاله، اصطلاح DEM اصلاح شده توسط culvert از USGS اقتباس شده است [ 12 ].
یک روش رایج در میان فروشندگان داده های ALS، از جمله تولیدکنندگان HR-DEM، طبقه بندی پل ها به عنوان یک کلاس جداگانه از نقاط زمینی ALS بر اساس مشخصات پایه تشخیص و محدوده نور (LiDAR) که توسط انجمن فتوگرامتری و از راه دور آمریکا توسعه یافته است، است. سنجش (ASPRS) [ 13 ]. یکی از چالشهایی که هنگام طبقهبندی ابرهای نقطهای ALS با آن روبهرو میشود، فقدان اطلاعات در مورد مکان برخی از پلها و بهویژه آبچکانهایی است که تشخیص آنها از ابرهای نقطهای ALS از طریق بازرسی بصری دشوار است. 14 ].]. با این حال، یک طرح طبقهبندی مبتنی بر ASPRS LiDAR یک کد کلاس جداگانه را ارائه میکند که نشاندهنده آبریزها در دادههای طبقهبندیشده ALS است. متعاقباً، ابرهای نقطهای ALS طبقهبندیشده فاقد یک طبقهبندی مجزای مخزن در تحویل نهایی ابرهای نقطهای ALS طبقهبندیشده هستند. مکان DS ها، به ویژه آبریزها، اغلب برای فروشندگان داده های ALS ناشناخته است. برای ادغام اطلاعات در مورد مکان پل ها و پل ها برای یک محل خاص، DS ها یا نقشه برداری می شوند یا از منابع دیگر (به عنوان مثال، بخش های حمل و نقل (DOTs)، ماهواره، تصاویر هوایی، و سیستم ماهواره ای ناوبری جهانی (GNSS) – تهیه می شوند. بررسی های میدانی مبتنی بر) [ 10 ، 12 ، 15 ، 16 ، 17 ].
1.1. کار مرتبط
1.1.1. وضعیت تحقیق حاضر در بخش های حمل و نقل (DOTs)
اطلاعات قابل توجهی در مورد مکان های DS ها از DOT ها در دسترس است زیرا DS ها تحت صلاحیت DOT ها هستند. پلها و پلها بخشی جداییناپذیر از زیرساختهای حملونقل هستند (به عنوان مثال، جادهها و راهآهن)، که عبور بدون مانع از مسیرهای آب (به عنوان مثال، یک رودخانه یا یک نهر) را امکانپذیر میسازد. بنابراین، بازرسی منظم، ارزیابی عملکردی و تعمیر DSها شیوههای اساسی برای حملونقل پایدار و حفاظت از زیستگاه اطراف از تکه تکه شدن ناشی از DSهای مسدود شده یا خراب هستند [ 18 ، 19 ، 20 ، 21 ]. بهطور پیشفرض، مجموعه داده DS از DOT در دسترس تلقی میشود. با این وجود، مکان تعداد زیادی از DS برای آژانس های حمل و نقل، به ویژه پلکان ها ناشناخته است 22 ].[ 23 , 24 ]. به همین دلیل، فقدان مجموعه دادههای DS منجر به تلاشهایی برای ایجاد پایگاههای داده دیجیتالی DS در ظرفیت سراسری میشود [ 25 ، 26 ]. برای غنیسازی پایگاههای داده دیجیتال با مکانهای DS، منابع برتر گزارش میشوند (به عنوان مثال، تصاویر ماهوارهای و هوایی)، و همچنین تکنیکهای سیستم اطلاعات جغرافیایی (GIS) و بررسیهای میدانی مبتنی بر GNSS [ 27 ، 28 ، 29 ].
با این حال، چنین پایگاه های داده ای برای شهرستان ها یا ایالت های خاص در ایالات متحده با دسترسی عمومی در دسترس هستند. علاوه بر این، پایگاههای اطلاعاتی دیجیتالی DS در سطح ایالت ایجاد شده توسط DOTها ناقص در نظر گرفته میشوند، زیرا چندین جاده و خیابان در موسسات خصوصی واقع شدهاند و دسترسی به آن جادهها خارج از صلاحیت DOTها است، و بهدست آوردن دادههای گسترده DS چالش برانگیز است [ 24 ] . از دیدگاه جهانی، چنین پایگاههای اطلاعاتی نادر هستند [ 10 ، 16 ].
1.1.2. وضعیت پژوهش حاضر در علوم زمین (ES)
افزایش استفاده از ابرهای نقطه ALS منجر به توسعه روشهای جدیدی میشود که شامل گردشهای کاری خودکار برای استخراج ویژگیهای توپوگرافی (به عنوان مثال، جادهها، پلها و ساختمانها) است [ 30 ، 31 ]. به طور خاص، سازمان زمینشناسی ایالات متحده (USGS) و سایرین، جریانهای کاری خودکار را برای رسیدگی به هیدرولوژی و ژئومورفولوژی در پذیرش گسترده استخراج خودکار ویژگیهای ژئومورفیک (به عنوان مثال، شبکه جریان برداری از جریانهای آب سطحی با استفاده از یک DEM اصلاحشده با پلک) توسعه دادهاند [ 12 , 32 ، 33 ] ( شکل 1 را ببینید ).
در دسترس بودن DSها (مثلاً فایل ورودی ورودی) ضروری ترین داده برای به دست آوردن یک DEM اصلاح شده با پلک و پس از آن برای استخراج صحیح ویژگی های ژئومورفیک است ( شکل 1 را ببینید ). در تحقیقات خود برای ارزیابی گردش کار خودکار همانطور که در شکل 1 نشان داده شده است ، DS ها از طریق ترکیبی از تکنیک های متشکل از دیجیتال سازی دستی از تصاویر هوایی و بررسی های میدانی مبتنی بر GNSS ترسیم شدند [ 12 ]. با این وجود، مصرف کنندگان داده های ALS، به ویژه کسانی که در تحقیق و توسعه در رشته های هیدرولوژی و ژئومورفولوژی علوم زمین (ES) دخیل هستند، اطلاعات مربوط به مکان DS ها را از منابع خارجی به دست می آورند [ 12 ، 15 ، 16 ].
1.1.3. راه حل های الگوریتمی
برای برخی از مناطق، منابع داده خارجی DS [ 12 ، 15 ، 16 ] کمیاب است، و به همین دلیل، راه حل های الگوریتمی توسعه داده شد [ 10 ، 17 ، 35 ]. در میان آن روشها، اولین تلاش برای سوزاندن آبراهههای نقشهبرداری شده در یک HR-DEM از طریق فرآیندی به نام سوزاندن جریان برای ایجاد یک DEM اصلاحشده با پلک انجام شد [ 36 ]. رویکرد سوزاندن جریان، ارتفاع سطوح جادهای مرتفع را برای مکانهایی که جریانهای آب از جادهها عبور میکنند، کاهش میدهد. در مقابل، ثابت شده است که این رویکرد محدود است، زیرا بهدست آوردن نقشههای مسیر آب دشوار است.
متداول ترین و استانداردترین روشی که امروزه مورد استفاده قرار می گیرد، روش الگوریتم نقض (BA) [ 37 ] است که در ابتدا توسط USGS (2010) [ 35 ] توسعه یافت و اخیراً توسط لیندزی و همکاران بهبود یافته است. (2015) [ 38 ] (برای جزئیات، به بخش 3.2 مراجعه کنید ).
با این حال، نویسندگان عملکرد روش BA را برای ایجاد یک DEM اصلاح شده با پلک ثبت کرده اند. تجزیه و تحلیل آنها فقط نشان داد که پل ها، پل ها و خندق های کنار جاده با استفاده از یک متر HR-DEM که از داده های ALS سرچشمه می گیرد، با موفقیت حل شده اند. آنها دقت کلی حدود 80% [ 38 ] از DSهایی را گزارش کردند که به درستی از یک HR-DEM با استفاده از روش BA حل شده اند. در مقابل، تعداد DSهایی که به اشتباه با روش آنها حل شده اند، مستند نشده اند (یعنی میزان خطای کمیسیون). علاوه بر این، تعداد DSهای درمان نشده (یعنی خطای حذف) توضیح داده نشده است. بنابراین، روش BA نیاز به ارزیابی بیشتر دارد.
1.1.4. توسعه های جدید
چه در ارتباط با نقشه برداری DS برای DOT ها (به بخش 1.1.1 مراجعه کنید ) و چه تحقیق و توسعه در هیدرولوژی و ژئومورفولوژی (به بخش 1.1.2 مراجعه کنید )، وضعیت تحقیق حاضر در مورد موضوع نقشه برداری DS انواع زیادی از روش ها و روش ها را گزارش می کند. تکنیک های توسعه یافته [ 12 ، 15 ، 16 ، 17 ، 39 ]. با این حال، هیچ روش یکپارچه و خودکار وجود ندارد، و نیاز به چنین روش یکپارچه گزارش شده است [ 10 ، 16 ].
فقط تا همین اواخر یک الگوریتم نقشه برداری ساختار زهکشی مقرون به صرفه و خودکار (DSMA) توسط وانگ و فرید (2021) [ 14 ] توسعه یافت. DSMA با استفاده از ابرهای نقطه طبقه بندی شده ALS و داده های خط مرکزی جاده توسعه یافته است. ارزیابی نقشهبرداری DS با استفاده از مجموعه دادههای معیار DS بهدستآمده از دپارتمان حملونقل ورمونت (VTrans)، که با استفاده از تصاویر نمای خیابان Google Earth (GE-SV) بیشتر شد، انجام شد. 14 ]]. در تحقیق آنها، معیارهای ارزیابی دقت پیشبینی (به عنوان مثال، دقت (P)، یادآوری (R)، و امتیاز F1) و دقتهای موقعیتی، بر حسب فواصل اقلیدسی DSهای نقشهبرداری شده در مقایسه با DSهای معیار، ارزیابی شدند. . با استفاده از پیشبینی و دقت موقعیت، نویسندگان به تمام جنبههای معیارهای ارزیابی برای دو سایت مختلف در ورمونت، ایالات متحده پرداختند [ 14 ]. ارزیابی نقشهبرداری DS در مقایسه با مجموعه دادههای معیار DS نشان داد که عملکرد DSMA در تطابق نزدیک با مجموعه دادههای معیار DS دو منظره مختلف (به عنوان مثال، شهری و روستایی) سایتهای آزمایشی بود. بنابراین، DSMA ابزاری توانا برای پرداختن به چالشهای نقشهبرداری DS در یک ظرفیت وسیع است. معیارهای ارزیابی دقیق DSMA را می توان در [ 14 ] یافت] یافت.
1.1.5. مشارکت ها
هدف این مقاله استفاده از روش BA [ 38 ] برای حل و فصل DS ها از یک HR-DEM برای ایجاد یک DEM اصلاحشده با پلک است (به بخش 3.2 مراجعه کنید ). هدف ما محاسبه نرخ منفی کاذب (FNR) (یعنی خطای حذف) و نرخ مثبت کاذب (FPR) (یعنی خطای پورسانت) با استفاده از DEM اصلاح شده با کولورت روش BA بود تا عملکرد کلی BA روش را می توان ارزیابی کرد، که در مطالعات گذشته فاقد آن بود (به بخش 1.1.3 مراجعه کنید ).
DSMA یک الگوریتم نقشه برداری DS است که به تازگی توسعه یافته است که باید در مقایسه با رویه های استاندارد موجود (مثلاً روش BA) برای به دست آوردن یک DEM اصلاح شده توسط آبچک اندازه گیری شود تا اطلاعات مربوط به این موضوع برای دیگران به روز شود (مانند USGS). ) ( شکل 1 ). هدف ما فرمولبندی چارچوبی برای به دست آوردن یک DEM اصلاحشده با پلک با استفاده از نقشهبرداری DSهای روش DSMA بود (به بخش 3.3 مراجعه کنید ). پس از آن، با استفاده از FNR و FPR منشاء گرفته از DEM اصلاح شده با پلک جدید توسعه یافته روش DSMA [ 14 ]، دقت راه حل پیشنهادی ارزیابی خواهد شد.
در نهایت، FNR و FPR ناشی از DEM اصلاح شده با پلک روشهای BA و DSMA برای ارزیابی عملکرد هر دو روش مقایسه میشوند.
2. منطقه مطالعه و مجموعه داده ها
2.1. منطقه مطالعه و بررسی ALS
تمرکز مطالعه حاضر منطقه ای به مساحت 36 کیلومتر مربع واقع در عرض و طول جغرافیایی 72°48’7.84″ غربی و 44°54’41.76″ شمالی در حوزه آبخیز Missiquoi در شمال ورمونت، ایالات متحده آمریکا بود ( شکل 2 ). ماتریس های پوشش زمین کاربری (LULC) به دست آمده از نقشه LULC به دست آمده از مرکز اطلاعات جغرافیایی ورمونت (VCGI) [ 40 ] نشان می دهد که پوشش زمین غالب کشاورزی با 48 درصد و جنگل با 47.5 درصد از 36 کیلومتر است. 2 . بخش باقیمانده از زمین برهنه، سطح غیرقابل نفوذ (ISA) و تودههای آبی تشکیل شده است که 4.5 درصد از کل مساحت را تشکیل میدهند.
توپوگرافی کلی یک انتقال از تپه به دره از شمال به جنوب است که نمونه ای از یک چشم انداز کشاورزی در دو طرف رودخانه Missiquoi است ( شکل 2 a). منطقه کوهستانی عمدتاً از پوشش جنگلی تشکیل شده است، در حالی که ناحیه دره زمین کشاورزی در کنار دشت های سیلابی رودخانه Missiquoi است ( شکل 2 a). زمین های کشاورزی تحت سلطه زمین های مسطح، با حداقل دامنه شیب 0-5 درجه است. حداقل و حداکثر ارتفاع از سطح دریا 107 متر و 273 متر است.
بررسی اسکن لیزری هوابرد (ALS) در منطقه مورد مطالعه متمرکز توسط سازمان زمین شناسی ایالات متحده (USGS) در بهار انجام شد که در 15 آوریل 2009 آغاز شد و در 16 آوریل 2009 پایان یافت، بدون پوشش برفی روی زمین با استفاده از Leica ALS50II. اسکنر لیزری [ 41 ]. هواپیمای بال ثابت سسنا 206 مجهز به اسکنر لیزری ALS50II در ارتفاع 1372 متری زمین با همپوشانی اسمی جانبی 36 درصد پرواز کرد که شامل 158 خط پرواز است. Leica ALS50II قادر به جمع آوری چهار بازده لیزر در هر پالس خروجی در حداکثر فرکانس 150 کیلوهرتز با واگرایی پرتو 0.22 mrad است. داده های ALS به دست آمده بیشتر در نقاط زمینی و غیرزمینی با تراکم نقطه 2 pt/m2 پردازش شد .. 26 نقطه معیار بر روی توپوگرافی های مختلف (به عنوان مثال، زمین برهنه، چمن، و ISA) برای ارزیابی دقت ALS استفاده شد، که خطای میانگین مربعات ریشه (RMSE) 8.2 سانتی متر را نشان داد. پس از آن، ابرهای نقطه ای ALS طبقه بندی شده در OpenTopography توسط USGS برای استفاده عمومی در دسترس قرار گرفت [ 42 ، 43 ]. یک HR-DEM به دست آمده از داده های ALS به دست آمده برای رمزگشایی توپوگرافی ناحیه کانونی در شکل 2 الف نشان داده شده است.
2.2. معیار DS Dataset همراه با جاده های FHWA و Non-FHWA
نمایش نقشهبرداری مراکز جادهای در قالب خط برداری، که به عنوان دادههای خطوط مرکزی جاده شناخته میشود، از پورتال عمومی VCGI برونسپاری شد [ 40 ]. خطوط مرکزی راه که از VCGI به دست میآید توسط مقامات بزرگراه فدرال (FHWA) اداره میشوند که در اینجا به عنوان جادههای FHWA شناخته میشوند (خطوط سیاه را در شکل 2 ب ببینید). جاده های مسکونی و خصوصی خارج از حوزه قضایی FHWA با استفاده از ISA [ 44 ] به دست آمدند (خطوط زرد در شکل 2 a را ببینید).
مقامات FHWA مجموعه داده های DS (به عنوان مثال، پل ها و پل ها (نقاط قرمز)) را همراه با جاده های FHWA (خطوط سیاه در شکل 2 a) جمع آوری کردند [ 45 ]. این بررسی بر اساس مختصات GNSS پل ها و کانال ها، همانطور که با نقاط قرمز در شکل 2 الف نشان داده شده است. در منطقه مورد مطالعه متمرکز، مقامات FHWA 148 DS را ترسیم کردند که عمدتاً از پلکان و چند پل تشکیل شده بودند. نقاط بررسی GNSS DS ها به یک نمایش خط مستقیم تبدیل شدند، همانطور که با خط قرمز در شکل 2 ب نشان داده شده است. نمایش خط مستقیم یک DS اطلاعات مکان های DS و جهت گیری آنها را در زیر جاده ها همانطور که در شکل 2 ب نشان داده شده است، حمل می کرد.
برای جاده های غیر FHWA (خطوط زرد در شکل 2 الف) و آنهایی که خارج از صلاحیت مقامات بزرگراه ایالتی (FHWA) هستند، در مجموع 18 DS با استفاده از نمای خیابان Google Earth (GE-SV) در ارتفاع بالا قرار و دیجیتالی شدند. وضوح تصاویر پانوراما [ 46 ]. همچنین می توان به شرح مفصلی از مجموعه داده های معیار DS دست یافت [ 14 ].
3. روش ها
گردش کار تحقیق پیشنهادی در شکل 3 ارائه شده است . تحقیق پیشنهادی در چهار مرحله انجام شد. (الف) داده های ALS برای به دست آوردن یک HR-DEM از قبل پردازش شده است. علاوه بر این، جادههای FHWA و غیر FHWA به دادههای خط مرکزی تک جاده در مرحله پیش پردازش ترکیب شدند. (ب) سپس، روش BA به HR-DEM برای ایجاد یک DEM اصلاح شده با پلک اعمال شد. (ج) روش DSMA به HR-DEM برای ایجاد یک DEM اصلاحشده با پلک استفاده شد. (د) تعداد کل DS ها بر حسب مثبت واقعی (TP)، مثبت کاذب (FP) و منفی کاذب (FN) که از DEM های اصلاح شده با پلک (b) و (c) منشأ می گیرند، با استفاده از پایگاه داده DS را به عنوان یک مرجع استاندارد معیار قرار دهید (به بخش 2.2 مراجعه کنید). در نهایت، مقادیر TP، FP، FN برای به دست آوردن معیارهای ارزیابی FNR و FPR که از هر دو روش سرچشمه میگیرد، استفاده شد. جزئیات مربوط به هر مرحله پردازش در بخش های فرعی زیر ارائه شده است.
3.1. پیش پردازش
برای به دست آوردن یک DEM اصلاح شده با پلک با استفاده از روش های BA و DSMA، ابتدا یک HR-DEM از نقاط زمینی ALS در GSD 0.5 متر (به شکل 2 a) با استفاده از تکنیک درون یابی همسایه طبیعی (NNI) توسعه یافت ( شکل را ببینید). 3 الف). انتخاب NNI به این دلیل انجام شد که NNI در توسعه DSMA [ 14 ] پیاده سازی شد. بنابراین، روشهای درونیابی باید برای روشهای BA [ 38 ] و DSMA [ 14 ] سازگار باشند تا نتایج حاصل از هر دو روش ابری با قطعیت مقایسه شود.
پس از ایجاد HR-DEM، جاده های FHWA و غیر FHWA در داده های خط مرکزی تک جاده ادغام شدند. جادههای FHWA جادههایی بودند که از منابع دولتی به دست میآمدند، در حالی که جادههای غیر FHWA از ISA سرچشمه میگرفتند [ 40 ].
3.2. روش نقض الگوریتم (BA).
یک روایت ثابت گزارش میدهد که فرورفتگیها در کنار جادهها در یک HR-DEM معمولاً توسط DSهای پردازشنشده (مانند پلها و پلها) ایجاد میشوند که در مرحله پردازش HR-DEM عرضه نشدهاند. محقق دریافت که با تخلیه آن سینک ها با کانال های ترانشه از طریق جاده های مرتفع، تاثیر DS های پردازش نشده باقی مانده در HR-DEM را می توان به حداقل رساند [ 10 ، 17 ]. تا به امروز، پردازش سینک (به عنوان مثال، با الگوریتم نقض (BA)) به عنوان یک روش استاندارد مورد استفاده قرار می گیرد که توسط بسیاری از محققین [ 35 ، 38 ، 47 ] برای تولید DEM های اصلاح شده با پلک در هنگام داده های جامع DS خارجی توسعه و بهبود یافته است. وجود ندارد
سینک سلول یا گروهی از سلولهای DEM با کمترین ارتفاع در مقایسه با تمام سلولهای مجاور مستقیم است، بنابراین یک سطح DEM ناپیوسته در مکانهای DSs (سلولهای سیاه در شکل 4 ) ایجاد میکند [ 48 ]. روش الگوریتم نقض (BA) برای پردازش آن غرقهای یک HR-DEM [ 38 ] طراحی شده است. روش BA ابتدا با قرار دادن تمام سینک ها در یک DEM معین آغاز می شود، همانطور که با نمودار شماتیک در شکل 4 نشان داده شده است. هنگامی که تمام سینک ها در DEM یافت می شوند (به عنوان مثال، سلول های سیاه در شکل 4 )، روش BA هر بار یک سینک را از لیست انتخاب می کند (یعنی یک سینک منبع که باید پردازش شود) (سلول های قرمز را در شکل 4). این کار با یافتن سینک(های) نامزد در همسایگی در شعاع جستجوی تعریف شده توسط کاربر (دایره قرمز در شکل 4 ) دنبال می شود. از میان سینکهای کاندید (سلولهای سبز در شکل 4 )، نزدیکترین کاندید بر اساس فواصل اقلیدسی (d1، d2، و d3) محاسبهشده از مرکز سینک منبع (قرمز) تا مراکز سینکهای کاندید (سبز) انتخاب میشود. همانطور که با خطوط سیاه در شکل 4 نشان داده شده است. در نهایت، ارتفاع سلول(های) معمولی DEM در سینک منبع و سینک کاندید مربوطه به گونهای کاهش مییابد که شیبدارترین مسیر فرود را میتوان از سلول سینک در ارتفاع بالاتر به سلول سینک در ارتفاع پایینتر محاسبه کرد. همانطور که با سلول های زرد در شکل 4 نشان داده شده است. روش BA به طور مکرر اکثر سینکها را در یک HR-DEM برای ایجاد یک DEM اصلاحشده با پلک اصلاح میکند [ 38 ].
بر اساس اصل اتصال دو سینک در فاصله نزدیک توسط یک شعاع جستجوی تعریف شده توسط کاربر ( شکل 4 )، روش BA در ساخت کانال های خطی از طریق سطوح مرتفع جاده موفق بود، و یک سینک در یک سمت جاده را به یک سینک متصل می کرد. در طرف دیگر جاده ( شکل 5 الف). پس از آن، جریانهای آب میتوانند آزادانه از طریق مجراهای خط جدید توسعهیافته DEM اصلاحشده با پلک عبور کنند ( شکل 5 ب) [ 38 ].
با استفاده از HR-DEM از پیش پردازش شده ( شکل 3 الف)، روش BA به HR-DEM برای به دست آوردن یک DEM اصلاح شده با پلک با استفاده از نرم افزار منبع باز سیستم اطلاعات جغرافیایی (GIS) به نام ابزارهای تحلیل جغرافیایی وایت باکس (GAT) [ 49 ] اعمال شد. ]. حداکثر شعاع جستجوی تعریف شده توسط کاربر 100 متر برای یافتن یک سینک منبع و سینک کاندید مربوطه استفاده شد ( شکل 4 را ببینید). انتخاب یک شعاع جستجوی 100 متری اطمینان حاصل کرد که همه DS ها در منطقه مورد مطالعه ( شکل 2)الف) طول های 100 متر یا کمتر را می توان با روش BA حل کرد. این نیاز ما را برآورده کرد، زیرا حداکثر طول DS یافت شده در منطقه مورد مطالعه ما 70 متر بود. برای توانمندسازی روش BA برای حل همه DS ها از HR-DEM برای ایجاد یک DEM اصلاح شده با آبگذر ( شکل 2 a)، 30 متر حاشیه اضافی برای شعاع جستجوی تعریف شده توسط کاربر برای آن DS ها اختصاص داده شد، در صورتی که آنها نادیده نویسندگان و بزرگتر از 70 متر.
این یکی از محدودیت های روش BA است، زیرا کاربر باید شعاع جستجوی تعریف شده توسط کاربر را تعریف کند. به عنوان مثال، یک DS نشان داده شده در شکل 5 c حدود 40 متر طول دارد و با تنظیم شعاع جستجوی تعریف شده توسط کاربر روی 100 متر با موفقیت حل شد. برای شعاع جستجوی کمتر تعریف شده توسط کاربر، مانند 39 متر، DS 40 متری ( شکل 5 ج) می تواند حل نشده باقی بماند. بنابراین، شعاع جستجوی تعریف شده توسط کاربر با آزمون و خطا در روش آنها پیدا شد [ 38 ].
پس از ایجاد DEM اصلاح شده با پلک با استفاده از روش BA. همانطور که در شکل 5 الف نشان داده شده است، جریان های آب می توانند آزادانه از طریق ترانشه های جدید توسعه یافته در DEM اصلاح شده با پلک عبور کنند ( شکل 5 ب). پس از آن، یک شبکه زهکشی (DN) (یعنی نقشه مسیرهای آب) از DEM اصلاح شده با پلک روش BA استخراج شد ( شکل 5 ب). برای یافتن کل DS های حل شده در DEM اصلاح شده با پلک. DN در نهایت با خطوط مرکزی جاده قطع شد (نقاط قرمز در شکل 5 ج).
3.3. روش الگوریتم نقشه برداری DS (DSMA).
وانگ و فرید (2021) با توسعه یک الگوریتم نقشه برداری ساختار زهکشی (DSMA) با استفاده از ابرهای نقطه ای ALS و داده های خط مرکزی جاده، یک رویکرد جدید و خودکار را برای نقشه DSs ارائه کردند [ 14 ]. طبق رویکرد آنها، ابتدا، همه انواع جاده ها (به عنوان مثال، اداره بزرگراه فدرال تحت مدیریت دولت (FHWA)) و آنهایی که خارج از حوزه قضایی FHWA (به عنوان مثال، غیر FHWA) با استفاده از یک ترکیب ترکیبی از نقاط زمینی ALS حذف شدند. ماسک جاده ای که از بافرهایی با اندازه های مختلف، با توجه به عرض جاده مربوط به هر کلاس جاده ایجاد شده است ( شکل 6 a).
اول، ارزیابی آنها نشان داد که با حذف جادهها از ابرهای نقطه ALS، بیشتر مسیرهای آبی که در غیر این صورت توسط جادههای مرتفع [ 50 ] پوشیده شده بودند، یافت میشوند ( شکل 6 ب) [ 14 ]. به دنبال حذف جاده از ابرهای نقطه ALS، نقاط زمینی باقیمانده ALS برای ایجاد نوع جدیدی از DEM شناخته شده به عنوان DEM اصلاح شده با ALS (ALS-mDEM) ( شکل 6 )، که برای استخراج DN های بدون مانع با استفاده از دستورات جریانی روش D8 و Strahler ( شکل 6 ب).
دوم، برای بازیابی خودکار مکانهای DS، DN مشتقشده از ALS-mDEM سپس با خطوط مرکزی جادههای جادههای FHWA و غیر FHWA تقاطع شد (خط آبی در شکل 6 ج) [ 14 ].
عملکرد نگاشت DSMA، در مقایسه با یک مجموعه داده معیار قابل اعتماد DS، نشان داد که تعداد زیادی از DS با استفاده از یک DSMA متشکل از کانالها [ 14 ] نگاشت شدند. خروجی نهایی DSMA از دو مجموعه داده تشکیل شده است. ابتدا، DS های نقشه برداری شده در قالب نقطه قبلاً توسط وانگ و فرید (2021) [ 14 ] ارزیابی شده بودند. دومین DN نگاشت شده در شکل 6 ب نشان داده شده است. با این وجود، مشارکت اولیه DSMA ارائه اطلاعات در مورد مکان ها و جهت گیری ها بود ( شکل 6 را ببینید.ج، د) از DS ها در ظرفیت منطقه وسیع، و DEM اصلاح شده با پلک به طور پیش فرض توسط DSMA تولید نشده است. با این حال، دادههای DS تولید شده توسط DSMA میتواند برای به دست آوردن یک DEM اصلاحشده با پلک با استفاده از DSهای نقشهبرداری شده به عنوان فایل ورودی ورودی به ابزار اضافه کردن culvert جعبه ابزار ژئومورفولوژی توسعهیافته توسط USGS مفید باشد ( شکل 1 را ببینید ).
برای استفاده از داده های نقشه برداری شده DS، پردازش بیشتری لازم است زیرا ابزار add culvert به ورودی های خط DS نیاز دارد. برای دستیابی به آن، با استفاده از ماسک جاده [ 14 ]، DS ها به عنوان داده های خطی به دست آمدند (خط آبی، شکل 6 ج). با این حال، DS ها در مجراهای خطی که با استفاده از DSMA نگاشت شده اند ( شکل 6 ج) خطوط کاملاً مستقیم نیستند ( شکل 6 ج را ببینید). با این وجود، مجراهای خط تا 5 متر تعمیم داده شدند تا یک مجرای خط مستقیم که نشان دهنده DS ها باشد ( شکل 6 د) با استفاده از ابزار تعمیم ArcGIS 10.8.1 [ 51 ].]. تعمیم یک فرآیند خودکار برای حذف گره های اضافی از یک خط برداری با صاف کردن خط حاصل است. ما مقادیر تعمیم 1-5 متر را امتحان کردیم و دریافتیم که مقدار تعمیم 5 متر منجر به مجراهای خط مستقیم بهتری می شود ( شکل 6 د). شکل 6 d نشان می دهد که DS ها در مجرای خط مستقیم فایل ورودی ورودی مورد نیاز را فراهم می کنند. برای در نظر گرفتن خط تعمیمیافته بهعنوان ورودی معتبر در مقایسه با مجموعه دادههای معیار DS، ورودی DS و خروجی DS ترسیمشده باید همتراز باشند (خط آبی را در شکل 6 د) ببینید. در نهایت، DS ها در مجراهای خط مستقیم برای به دست آوردن DEM اصلاح شده با پلک با استفاده از ابزار add culvert USGS توسعه یافته در دسکتاپ ArcGIS 10.8.1 ( شکل 3 c) [ 12 ] استفاده شدند.]، همانطور که در شکل 6 نشان داده شده است.
برای گسترش بیشتر رویکرد ما، DEM اصلاح شده با پلک دو بار با استفاده از DS نقشهبرداری شده از روش DSMA پردازش شد. ابتدا HR-DEM به یک فایل LAS نقطه ای تبدیل شد و سپس از فایل نقطه ای LAS برای نگاشت DS ها استفاده شد. با استفاده از چارچوب پردازش همانطور که در شکل 6 نشان داده شده است ، یک DEM اصلاح شده با پلک تولید شد ( شکل 3 ج). این ارزیابی برای بررسی اینکه آیا یک DSMA قادر به نقشه برداری DS ها با استفاده از یک HR-DEM در زمانی که ابرهای نقطه ALS در دسترس نبود، انجام شد. دوم، DSMA برای نگاشت پایه DSs بر روی ابرهای نقطه ALS اصلی استفاده شد. سپس، DS های نگاشت شده برای ایجاد یک DEM اصلاح شده با پلک استفاده شدند (به کادر قرمز در شکل 3 مراجعه کنید.ج). این مرحله اعتبارسنجی بود تا ببینیم آیا عملکرد DSMA مشابه آن DSهایی است که با استفاده از یک HR-DEM نقشه برداری شده اند در مقایسه با ابرهای نقطه اصلی ALS (کادر قرمز در شکل 3 ج). در نهایت، DN ها سپس از DEM های اصلاح شده توسط پلک استخراج شدند و با خطوط مرکزی جاده (نقاط قرمز در شکل 6 f) تقاطع یافتند تا کل DSهای یافت شده در DEM های اصلاح شده با پلک روش DSMA ( شکل 3 ج) را پیدا کنند.
3.4. معیارهای ارزیابی
برای ساخت معیارهای ارزیابی FPR با استفاده از رابطه (1) و FNR با استفاده از معادله (2)، کل DSهای یافت شده از DEM های اصلاح شده با کولور روش های BA و DSMA به عنوان TP، FN، یا FN طبقه بندی شدند ( شکل 3). د).
TP نشاندهنده زمانی است که جریانهای آب به درستی از طریق DSs در DEM اصلاحشده با پلک روش BA ( شکل 5 ج) و روش DSMA ( شکل 6 ج) در مقایسه با مجموعه دادههای معیار DS مربوطه عبور میکنند. FP نشاندهنده زمانی است که جریانهای آب از طریق DSهای ساختهشده مصنوعی در مقایسه با مجموعه دادههای معیار DS مجاز بودند. در نهایت، FN نشاندهنده زمانی است که جریانهای آب از طریق DSs در مقایسه با مجموعه داده معیار DS مجاز نبودند:
افپآر=نافپ/نافپ+نتیپ
افنآر=نافن/نافن+نتیپ
4. نتایج
4.1. ارزیابی نقشه برداری DS از روش BA با استفاده از HR-DEM
ما ابتدا نتایج آمار توصیفی DS ها را به صورت TP، FP و FN، که از یک DEM اصلاح شده با پلک با روش BA به دست آمده است، گزارش می کنیم ( جدول 1 را ببینید ). طبقه بندی DS به طور جداگانه همراه با جاده های FHWA و غیر FHWA انجام شد (به بخش 2.2 مراجعه کنید )، برای ارزیابی میزان عملکرد روش BA همراه با هر نوع جاده.
با استفاده از TP، FP، و FN، FPR های 0.28 برای جاده های FHWA و 0.62 برای جاده های غیر FHWA پیدا شد. به طور مشابه، FNR 0.32 برای جاده های FHWA و 0.61 برای جاده های غیر FHWA گزارش شده است ( جدول 1 ). با مشاهده جدول 1 ، برخی روندهای واضح ظاهر می شوند، جایی که روش BA مقادیر مشابهی را برای FPR و FNR در امتداد جاده های FHWA و غیر FHWA نشان داده است.
ما اولین کسانی هستیم که علل و اثرات موارد FN و FP را در مقایسه با مجموعه داده معیار DS برای روش BA به منظور ارزیابی عملکرد آن بررسی کردهایم. بنابراین، موارد FN و FP بر اساس ارزیابی ما بیشتر به سه مورد مجزا طبقهبندی شدند. Case-1 و Case-2 با FNs و Case-3 با FPs مرتبط بودند. آمار توصیفی تفصیلی در جدول 1 نشان داده شده است ، در حالی که هر سناریوی موردی در بخش 4.3 در مقایسه با روش DSMA با استفاده از داده های معیار DS به عنوان مرجع استاندارد مورد بحث قرار گرفته است.
4.2. ارزیابی نقشه برداری DS از روش DSMA با استفاده از ابرهای نقطه ای HR-DEM و ALS
تعداد DSهای یافت شده از DEM اصلاح شده با پلک با استفاده از مجموعه داده DS مبتنی بر DSMA نیز به عنوان TP، FP و FN در جدول 2 برای مقایسه با روش BA گزارش شده است ( جدول 1 ).
جدول 2 نشان می دهد که تعداد کل DS طبقه بندی شده به عنوان TP، FP، و FN از DEM اصلاح شده با پلک بر اساس DS های نقشه برداری شده با استفاده از HR-DEM برابر با TP، FP و FN از DEM اصلاح شده با پلک بر اساس نقشه برداری شده است. DS ها فقط از ابرهای نقطه ALS استفاده می کنند ( جدول 2 را ببینید ). جدول 2 روندهای جالبی را نشان می دهد که پدیدار شده اند، زیرا DEM اصلاح شده با پلک یا داده های نقشه برداری DS مبتنی بر HR-DEM یا ابرهای نقطه ALS اصلی تحت تأثیر منبع داده قرار نگرفته اند ( جدول 2 را ببینید ).
ارزیابی زیر تأکید میکند که به تنهایی، HR-DEM در مقایسه با ابرهای نقطهای ALS برای نقشهبرداری DSs با استفاده از روش DSMA و پس از آن تولید DEM اصلاحشده با آبگذر مفید است. بنابراین، DS را می توان با تبدیل HR-DEM به داده های نقطه ای بدون به خطر انداختن نتایج نگاشت DS ترسیم کرد.
ارزیابی دقت هنگام ایجاد DEM اصلاح شده با پلک با استفاده از داده های DS که از روش DSMA ( جدول 2 ) نشات می گیرد در مقایسه با روش BA ( جدول 1 ) روندهای جالبی را نشان داد. جدول 2 ، در مقایسه با جدول 1 ، نشان می دهد که FPR 0.05 مشاهده شده برای جاده های FHWA و 0.12 مشاهده شده برای جاده های غیر FHWA در مقایسه با روش BA، که 0.28 برای جاده های FHWA و 0.62 برای جاده های غیر FHWA مشاهده شده است، بسیار کمتر است. جاده های FHWA به طور مشابه، FNR 0.07 برای جادههای FHWA و 0.38 برای جادههای غیر FHWA در مقایسه با روش BA که 0.32 برای جادههای FHWA و 0.61 برای جادههای غیر FHWA یافت شد (برای مقایسه، جدول 1 و را ببینید. جدول 2 ).
در زمینه ایجاد DEM اصلاح شده با پلک، روند ظهور ماتریس های ارزیابی بالاتر روش DSMA در مقایسه با روش BA بیشتر بررسی و بر اساس هر سناریوی موردی جدول 1 مقایسه شد.
4.3. ارزیابی تطبیقی روشهای BA و DSMA
ارزیابی ما نشان میدهد که DSMA مبتنی بر رویکرد بهتری نسبت به روش BA است، که منجر به یک DEM اصلاحشده با پلک دقیقتر میشود. DSMA ابتدا ابرهای نقطهای ALS را از انسداد ویژگیهای ساخته شده توسط انسان (مثلاً جادهها) قبل از اینکه بتواند یک DEM اصلاحشده با ALS (ALS-mDEM) ایجاد کند، و سپس، یک DN را تصحیح میکند، همانطور که در شکل 6 c [ 14 ] نشان داده شده است. با حذف موانع ساخته شده توسط انسان از ALS-mDEM، مرحله نقشه برداری تقریباً تمام مسیرهای آبراه تنظیم شده است ( شکل 6).ج) عبور از جاده ها. پلها و پلها بیشتر بر روی جریانهای آب یافت میشوند، و با تقاطع با خطوط مرکزی جاده، DSهای یافت شده بسیار نزدیک به مجموعه دادههای معیار DS هستند، که باعث میشود رویکرد DSMA برای نقشهبرداری DSها قویتر باشد. پس از آن، DS های نقشه برداری شده می توانند با استفاده از چارچوب فرموله شده در یک HR-DEM گنجانده شوند ( شکل 3 c و شکل 6 را ببینید).
برعکس، روش BA برای حل سینک ها با ترانچ کردن مجاری بر اساس فاصله اقلیدسی بین دو سینک بسیار نزدیک به یکدیگر است ( شکل 4 را ببینید ). DEM اصلاح شده با پلک با استفاده از روش BA به دست آمد، اما همه DS ها پردازش نشدند. بررسی ما نشان داد که با پیروی از اصل اساسی تعمیر سینکهای ناشی از DSها، روش BA منجر به سه سناریوی موردی مختلف شد ( جدول 1 ) که در آن برای چندین DS به منظور ایجاد یک DEM اصلاحشده با آبگذر فاقد وضوح بود.
4.3.1. مورد-1: هیچ منبع یا سینک کاندید یافت نشد
برای ترانشه یک مجرا از طریق جاده های مرتفع، روش BA باید یک سینک بالادست (یعنی یک سینک منبع) و یک سینک پایین دست مربوطه (یعنی سینک کاندید) را پیدا کند ( شکل 4 را ببینید ). شکل 7 a یک DS را نشان می دهد که به درستی رمزگشایی شده است (TP) در یک DEM اصلاح شده با پلک (خط آبی) و همان DS هایی که با روش DSMA (خط زرد) در مقایسه با معیار DS (خط قرمز) رمزگشایی شده اند.
با این حال، همیشه این مورد برای چندین DS که یک سینک منبع بالادستی پیدا شد در حالی که یک سینک نامزد پایین دست مربوطه گم شده بود، صادق نیست. بنابراین، ترانچ کردن یک مجرا با روش BA امکان پذیر نبود و باعث ایجاد FN شد ( شکل 7 ب). این یافته همچنین دوک و همکاران را تأیید می کند. (2003) مشاهدات [ 50 ] به عنوان یک DN ناپیوسته می شود ( شکل 7 ب) در هر دو طرف جاده. برای چندین مکان دیگر، سینک منبع و سینک کاندید مربوطه هر دو طرف جاده را ندارند، همانطور که در شکل 7 c نشان داده شده است، که باعث ایجاد موارد FN برای روش BA می شود که از سناریوی Case-1 سرچشمه می گیرد ( جدول 3 ).
در مقابل، شکل 7 b,c نشان میدهد که روش DSMA از چنین مشکلاتی مرتبط با روش BA (به عنوان مثال، جستجوی منبع و سینکهای کاندید مربوطه) رنج نمیبرد ( شکل 4 ). در عوض، DSMA مسیرهای جریان آب را با استفاده از یک ALS-mDEM پیدا کرد، در حالی که جاده ها قبلاً حذف شده بودند به طوری که جریان های آب آزادانه در دو طرف جاده عبور می کردند. DN بر اساس جهت جریان و معیارهای انباشت جریان [ 14 ] بود، همانطور که با خط زرد نشان داده شده است، رمزگشایی تمام DS هایی که به درستی نقشه برداری شده اند (TP) با روش DSMA در مقایسه با روش BA (خط آبی).
4.3.2. مورد-2: هیچ راه حلی در سینک های یافت شده وجود ندارد
مشاهده شده است که یک سینک منبع و سینک کاندید مربوطه هر دو در کنار جاده یکسان در شعاع جستجوی تعریف شده توسط کاربر پیدا شدند ( شکل 4 را ببینید )، همانطور که در شکل 8 نشان داده شده است. با این حال، سینک های کاندید در سمت دیگر جاده وجود نداشتند، که باعث شد هیچ راه حلی با روش BA پیدا نشود، و در نتیجه موارد FN ایجاد شد ( شکل 8 و جدول 1 ). در مقایسه با روش BA، روش DSMA با موفقیت DS زیرین را پیدا کرد، همانطور که با خط زرد در شکل 8 نشان داده شده است.
با توجه به دلایل ذکر شده در بالا، تعداد موارد FN برای روش BA برای جاده های FHWA و غیر FHWA در مقایسه با روش DSMA ( جدول 1 و جدول 2 ) همیشه بیشتر بود. این روش BA را به FNR 0.32 در امتداد جاده های FHWA و 0.61 در امتداد جاده های غیر FHWA رساند که به طور قابل توجهی بالاتر از FNR روش DSMA 0.07 در امتداد جاده های FHWA و 0.38 در امتداد جاده های غیر FHWA بود ( جدول 1 و جدول 2). ).
4.3.3. مورد-3: راه حل های اشتباه در سینک های پیدا شده
در مورد-3، روش BA در یافتن یک منبع سینک در بالادست و یک سینک نامزد مربوطه در پایین دست موفق بود ( شکل 9 ). پس از آن، یک کانال بین سینک منبع و سینک کاندید مربوطه ترانشه شد. با این حال، راهحل پیشنهادی در مقایسه با مجموعه دادههای معیار DS اشتباه بود، که نشان میدهد هیچ DS برای آن مکان وجود ندارد و بنابراین باعث ایجاد موارد FP میشود ( شکل 9 و جدول 1 ).
همه FPهای منشأ گرفته از روش BA متعلق به Case-3 برای جاده های FHWA و غیر FHWA بودند ( جدول 1 ).
ماهیت FP های ایجاد شده توسط الگوریتم DSMA به طور خلاصه توسط وانگ و فرید (2021) توضیح داده شد، و خوانندگان باید به [ 14 ] مراجعه کنند، که بیان می کند که DSMA برخی DN مصنوعی ایجاد می کند که باعث موارد FP می شود. بنابراین، آن خطا به DEM اصلاح شده با پلک بر اساس DS های نقشه برداری شده با استفاده از روش DSMA منتشر می شود. با این حال، کل موارد FP ناشی از روش DSMA در مقایسه با روش BA بسیار کمتر بود ( جدول 1 و جدول 2 را ببینید).
مقایسه کلی موارد FP و FN ناشی از روش BA آمار مشابهی را نشان داد که در آن موارد FP تقریباً برابر با موارد FN بود ( جدول 1 ). بنابراین، FPR و FNR برای روش BA به ترتیب در امتداد جادههای FHWA و غیر FHWA مشابه بودند.
برای درک این روند، سناریوهای موردی نشان داده شده در شکل 7 ، شکل 8 و شکل 9 بیشتر مورد تجزیه و تحلیل قرار گرفتند. ما دریافتیم که برای روش BA، اگر راه حل درستی (FN) یافت نشد ( شکل 7 و شکل 8 را ببینید )، یک راه حل نادرست مربوطه (FP) یافت شد ( شکل 9 ). بنابراین، اگر جریانهای آب از طریق DS (FN) مجاز نباشند، جریانهای آب از طریق DSهای مصنوعی ( شکل 9 ) ایجاد شده با روش BA (FP) مجاز میشوند.
به همین دلیل، FPR و FNR در منطقه مورد مطالعه متمرکز مشابه بودند. برای جاده های FHWA، FPR 0.28 گزارش شد که مطابق با FNR 0.32 است. به طور مشابه، برای جادههای غیر FHWA، FPR 0.62 با FNR متناظر 0.61 پیدا کردیم. روش BA، همانطور که توسط دیگران گزارش شده است، می تواند پل های اصلی و آبچکان را تعمیر کند [ 40 ]. بنابراین، FPR و FNR در امتداد جادههای غیر FHWA بالاتر هستند زیرا جادههای غیر FHWA اغلب از پلکهایی با اندازههای کوچکتر تشکیل میشوند، همانطور که وانگ و فرید (2021) مشاهده کردند [ 14 ].
در مقایسه با روش BA، رویکرد DSMA عملکرد نسبتاً ثابتی را در امتداد جادههای FHWA و غیر FHWA نشان داد [ 14 ]. برای جاده های FHWA، FPR 0.05 پیدا شد که مربوط به FNR 0.07 است که به طور قابل توجهی کمتر از روش BA بود. به طور مشابه، برای جادههای غیر FHWA، FPR 0.12 را مشاهده کردیم که مربوط به FNR 0.38 است.
5. بحث
در زمینه ایجاد یک DEM اصلاح شده با پلک، این مطالعه نشان داد که روش DSMA برای نگاشت DS ها در قالب مجرای خط مستقیم به طور خودکار مفید است، که می تواند در یک HR-DEM برای به دست آوردن یک DEM اصلاح شده با پلک ادغام شود ( شکل را ببینید. 1 )، در مقایسه با روشهای دستی، اگرچه با اطلاعات موجود در مورد مکانهای DSها (مثلاً مکانهای GNSS)، زمان قابلتوجهی برای دیجیتالی کردن مکانهای DS در مجراهای خط مستقیم به صورت دستی برای تولید DEMهای اصلاحشده با پلک لازم است. با این حال، DSMA DS ها را در مجرای خط مستقیم به طور خودکار تامین می کند و حجم کار دیجیتالی سازی دستی را کاهش می دهد.
در مقایسه با روش BA، DSMA عملکرد بهبود یافته ای را برای ایجاد DEM های اصلاح شده با پلک نشان داد. ارزیابی ما نشان داد که DSهای مبتنی بر DSMA تعداد بسیار بیشتری از DSها را از HR-DEMs در مقایسه با روش BA حل کردند ( جدول 1 و جدول 2 ). شکل 7 ، شکل 8 و شکل 9 نشان می دهد که DEM اصلاح شده با پلک به دست آمده با استفاده از داده های DS که توسط DSMA نقشه برداری شده است، همیشه به مسیرهای آب اجازه می دهد تا هر دو طرف جاده ها را در مقایسه با روش BA به هم متصل کنند، که اجازه عبور آبراهه ها از دو طرف را نمی دهد. جاده [ 50 ، 52 ].
با این حال، برای روش DSMA، جریانهای آب در مقایسه با مجموعه دادههای معیار DS دقیقاً از DS ها عبور نکردند ( شکل 7 ، شکل 8 و شکل 9 را ببینید). آمار دقیق در مورد دقت موقعیتی DS نقشه برداری شده با استفاده از DSMA در جدول 3 نشان داده شده است و توسط Wang و Nadeem (2021) [ 14 ] یافت شده است. دقت موقعیتی بر اساس فواصل اقلیدسی بین DS های نقشه برداری شده و داده های مرجع DS معیار مربوطه آنها بود. بنابراین، دقت موقعیتی تعیین میکند که چگونه DSها توسط DSMA در مقایسه با مرجع استاندارد (مثلاً مجموعه دادههای معیار DS) نگاشت شدهاند. شرح مفصلی از دقت موقعیتی DS های نقشه برداری شده در [ 14 ] ارائه شد].
آمار توصیفی، همانطور که در جدول 3 نشان داده شده است ، نشان می دهد که دقت موقعیتی حدود 10 متر برای میانه و چارک سوم DS های نقشه برداری شده توسط DSMA بود. با توجه به لیدبرگ و همکاران، دقت موقعیت در محدوده 10 متر قابل قبول بود. (2017) [ 39 ]، که در آن جابجایی موقعیتی جریانهای آب در تحقیقات آنها 10 متر تعیین شد. با این وجود، برای موارد استثنایی کمتر، حداکثر افست 72.53 متر برای مناطقی که توپوگرافی تقریباً مسطح است (به عنوان مثال، شیب ≈ 0 درجه) انتظار می رود [ 14 ]. برای چنین مناطقی، هنگامی که DS ها با استفاده از روش DSMA نقشه برداری می شوند، می توان DS های نگاشت شده را به موقعیت های اصلی خود به صورت دستی با استفاده از تصاویر سایه تپه، عکس های ارتو و تصاویر GE-SV تنظیم کرد [ 53 ، 54، 55 ]. چنین مداخلات دستی مورد نیاز استثنایی اندک هستند و فقط با توپوگرافی های مسطح مرتبط هستند [ 14 ].
ارزیابی ما نشان داد که DSهای نقشهبرداری شده مبتنی بر DSMA در محیطهای کاربردی زیر مفید بودند.
اول، ما نشان دادیم که برای مناطقی که به ابرهای نقطه ALS دسترسی ندارند اما یک HR-DEM در دسترس هستند، HR-DEM می تواند برای نقشه برداری DS ها با استفاده از روش DSMA استفاده شود. این برای کسانی مفید است که به مشتقات ALS مانند HR-DEM و دسترسی به ابرهای نقطه اصلی ALS که توسط عوامل زیادی (مانند حق چاپ و حریم خصوصی داده) محدود شده است، دسترسی دارند. دوم، برای به دست آوردن یک DEM اصلاح شده با پلک، بررسی های زمینی گسترده می تواند به میزان قابل توجهی کاهش یابد، زیرا DSMA نقشه های DS گسترده ای را در ظرفیت منطقه وسیعی با استفاده از یک HR-DEM یا بر اساس ابرهای نقطه ALS ارائه می دهد.
6. نتیجه گیری
عملکرد جدید توسعهیافته DSMA ( https://github.com/Nadeem1geo/Drainage-Structure-Mapping-Algorithm-DSMA- ، در 6 فوریه 2021 در دسترس قرار گرفت) در زمینه تولید یک DEM اصلاح شده با پلک در مقایسه با روش الگوریتم نقض (BA). DEM اصلاح شده با پلک در رشته های ES هیدرولوژی و ژئومورفولوژی ضروری است. پیش از این، الگوریتم نقض معمولاً برای ایجاد DEM های اصلاح شده با پلک استفاده می شد. در حالی که DSMA یک الگوریتم جدید توسعه یافته است که هرگز در این زمینه آزمایش نشده است، هر دو روش با استفاده از مجموعه داده معیار DS در امتداد جادههای FHWA و غیر FHWA ارزیابی شدند. ابرهای نقطه ای ALS طبقه بندی شده و خطوط مرکزی جاده برای منطقه مورد مطالعه 36 کیلومتر مربع در ورمونت، ایالات متحده آمریکا به دست آمد .
ارزیابی دقت پیشبینی هر دو روش با استفاده از FPR و FNR با مجموعه دادههای معیار DS انجام شد. ما دریافتیم که DSMA قوی بود و با برگرداندن کمترین FPR 0.05 در امتداد جادههای FHWA و 0.12 در امتداد جادههای غیر FHWA، DEM اصلاحشده با پلک دقیقتری را در مقایسه با روش BA ایجاد کرد. به طور مشابه، FNR 0.07 برای جادههای FHWA و 0.38 در امتداد جادههای غیر FHWA برای روش DSMA مشاهده شد، که دقت پیشبینی را به مجموعه دادههای معیار DS نزدیکتر میکند. بر خلاف DSMA، روش BA FPR 0.28 را در امتداد جادههای FHWA و 0.62 را در امتداد جادههای غیر FHWA نشان داد. به طور مشابه، روش BA منجر به FNR 0.32 در امتداد جادههای FHWA و 0.61 در امتداد جادههای غیر FHWA شد که دقت پیشبینی را پنج برابر کمتر از روش DSMA کرد.
منابع
- مارتین، آر. برنهارد، اچ. مایکل، وی. نوربرت، پی. فصل هجدهم – مدلهای زمین دیجیتال از اسکن لیزری هوابرد برای استخراج خودکار ساختارهای خطی طبیعی و انسانی. در تحولات در فرآیندهای سطح زمین ; اسمیت، ام جی، پارون، پی.، گریفیث، جی اس، ویرایش. الزویر: آمستردام، هلند، 2011; جلد 15، ص 475–488. [ Google Scholar ]
- سویلان، ام. تروونگ-هنگ، ال. ریویرو، بی. Laefer, D. استخراج خودکار ویژگی های جاده در محیط های شهری با استفاده از داده های ALS متراکم. بین المللی J. Appl. زمین Obs. Geoinf. 2018 ، 64 ، 226-236. [ Google Scholar ] [ CrossRef ]
- ما، اچ. ژو، دبلیو. Zhang، L. DEM پالایش با حذف پوشش گیاهی کم بر اساس ترکیب داده های شکل موج کامل و تراکم پیشرونده TIN. ISPRS J. Photogramm. Remote Sens. 2018 , 146 , 260–271. [ Google Scholar ] [ CrossRef ]
- لی، سی.-سی. وانگ، سی.-کی. تأثیر ارتفاع پرواز و فرکانس تکرار پالس بر نرخ نفوذ اسکنر لیزری برای تولید مدل رقومی ارتفاع در یک جنگل گرمسیری. GIScience Remote Sens. 2018 ، 55 ، 817-838. [ Google Scholar ] [ CrossRef ]
- شی، دبلیو. دنگ، س. Xu, W. استخراج ویژگی های مورفولوژیکی زمین لغزش در مقیاس چندگانه بر اساس Gi* محلی با استفاده از DEM مشتق شده از LiDAR در هوا. ژئومورفولوژی 2018 ، 303 ، 229-242. [ Google Scholar ] [ CrossRef ]
- پولات، ن. اویسال، م. Toprak، AS بررسی فرآیند تولید DEM بر اساس روشهای فیلتر کردن دادههای LiDAR، decimation و interpolation برای یک منطقه شهری. اندازه گیری 2015 ، 75 ، 50-56. [ Google Scholar ] [ CrossRef ]
- یانگ، پی. ایمز، DP; فونسکا، آ. اندرسون، دی. شرستا، ر. گلن، NF; Cao, Y. تأثیر وضوح DEM مشتق شده از LiDAR بر نتایج مدل حوضه در مقیاس بزرگ چیست؟ محیط زیست مدل. نرم افزار 2014 ، 58 ، 48-57. [ Google Scholar ] [ CrossRef ]
- Archuleta, C.-AM; کنستانس، EW; آروندل، ST; لو، ای جی; Mantey، KS; فیلیپس، لس آنجلس نقشه ملی بدون درز مدل ارتفاعی دیجیتال مشخصات ; 11-B9; سازمان زمین شناسی ایالات متحده: Reston، VA، ایالات متحده آمریکا، 2017. [ Google Scholar ]
- شومان، GJ-P. بیتس، پی . نیاز به یک مدل ارتفاع دیجیتال جهانی با دقت بالا و دسترسی باز . Frontiers Media SA: لوزان، سوئیس، 2020. [ Google Scholar ]
- Poppenga، SK; Worstell، BB Hydrologic Connectivity: ارزیابی های کمی سازه های زهکشی هیدرولوژیکی در یک مدل ارتفاعی. جی. ساحل. Res. 2016 ، 76 ، 90-106. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- Szypuła، B. ارزیابی کیفیت DEM به دست آمده از نقشه های توپوگرافی برای اهداف ژئومورفومتریک. Geosci را باز کنید. 2019 ، 11 ، 843-865. [ Google Scholar ] [ CrossRef ]
- کارترایت، جی.ام. Diehl، TH شناسایی خودکار ویژگیهای ژئومورفیک کانال جریان از مدلهای ارتفاعی دیجیتال با وضوح بالا در حوزههای آبخیز غرب تنسی . 2328-0328; سازمان زمین شناسی ایالات متحده: Reston، VA، ایالات متحده آمریکا، 2017. [ Google Scholar ]
- Heidemann، HK Lidar مشخصات پایه ; 11-B4; سازمان زمین شناسی ایالات متحده: Reston، VA، ایالات متحده آمریکا، 2012; پ. 114. [ Google Scholar ]
- وانگ، سی.-ک. Fareed, N. نقشه برداری ساختارهای زهکشی با استفاده از اسکن لیزری هوابرد با ترکیب اطلاعات خط مرکزی جاده. Remote Sens. 2021 , 13 , 463. [ Google Scholar ] [ CrossRef ]
- آرنت، آر. فاولستیچ، ال. یوپنر، آر. آسمان، ا. لنگریخت، جی. کاویشه، ف. Schulte، A. نقشه برداری سد جاده متحرک GNSS برای اصلاح TanDEM-X برای بهبود پایگاه داده برای مدل سازی آب سیل در شمال نامیبیا. محیط زیست علوم زمین 2020 ، 79 ، 1-15. [ Google Scholar ] [ CrossRef ]
- لی، RP; تانگ، ژ. لی، ایکس. Winter, J. مجموعه داده های ساختار زهکشی و اثرات آن بر مدلسازی جریان سطحی مشتق از LiDAR. ISPRS Int. J. Geo-Inf. 2013 ، 2 ، 1136-1152. [ Google Scholar ] [ CrossRef ]
- Poppenga، SK; Gesch، DB; Worstell، تشخیص تغییر هیدروگرافی BB: سودمندی کانال های سطحی مشتق شده از LiDAR DEMs برای به روز رسانی هیدروگرافی نقشه برداری شده. مربا. منبع آب دانشیار 2013 ، 49 ، 371-389. [ Google Scholar ] [ CrossRef ]
- Meegoda، JN; جولیانو، TM; تانگ، سی. سیستم مدیریت اطلاعات Culvert. ترانسپ Res. ضبط 2009 ، 2108 ، 3-12. [ Google Scholar ] [ CrossRef ]
- Ewaskiw، A. Culvert Installation and Removals، چگونه آنها بر روی زیستگاه اطراف تأثیر می گذارند و چگونه می توانیم روش های نگهداری خود را بهبود بخشیم. Ph.D. پایان نامه، دانشگاه لیکهد، تاندر بی، ON، کانادا، 2018. [ Google Scholar ]
- سالم، او. سلمان، بی. نجفی، م. کالورت شیوه های مدیریت دارایی و مدل سازی زوال. ترانسپ Res. ضبط 2012 ، 2285 ، 1-7. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- پارک، دی. سالیوان، ام. باین، ای. Scrimgeour، G. تکه تکه شدن جریان در سطح چشمانداز ناشی از آبریزهای آویزان در امتداد جادههای جنگل شمالی آلبرتا. می توان. جی. برای. Res. 2008 ، 38 ، 566-575. [ Google Scholar ] [ CrossRef ]
- پرین، جی، جونیور؛ جهوری، CS هزینه های اقتصادی خرابی پلک ها. در مجموعه مقالات آماده شده برای نشست سالانه TRB 2004، واشنگتن، دی سی، ایالات متحده آمریکا، 11 تا 13 ژوئیه 2004. [ Google Scholar ]
- Gassman، SL; ساساناکول، آی. پیرس، م. غیبی، ا. استارچر، آر. اووال، دبلیو. Rahman, M. خرابی کانال های لوله از یک رویداد بارندگی 1000 ساله در کارولینای جنوبی. در مرزهای ژئوتکنیکال 2017 ; انجمن مهندسین عمران آمریکا: Reston، VA، ایالات متحده آمریکا، 2017; صص 114-124. [ Google Scholar ]
- نجفی، م. یک رویکرد مدیریت دارایی برای زیرساخت های زهکشی و کانال ها . مرکز حمل و نقل دانشگاه منطقه ای میدوست، دانشگاه ویسکانسین: مدیسون، WI، ایالات متحده آمریکا، 2008. [ Google Scholar ]
- پرین، جی، جونیور؛ Dwivedi، R. نیاز به مدیریت دارایی مخزن. ترانسپ Res. ضبط 2006 ، 1957 ، 8-15. [ Google Scholar ] [ CrossRef ]
- ونر، ام. برگر، ال. کالورت مطالعات موردی مدیریت: ورمونت، اورگان، اوهایو و شهرستان لس آنجلس . اداره بزرگراه فدرال: واشنگتن، دی سی، ایالات متحده آمریکا، 2014. [ Google Scholar ]
- بلالی، وی. راد، AA; گلپرور فرد، م. تشخیص، طبقه بندی و نقشه برداری از علائم راهنمایی و رانندگی ایالات متحده با استفاده از تصاویر نمای خیابان گوگل برای مدیریت موجودی جاده ها. Vis. مهندس 2015 ، 3 ، 15. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- او، تی. عواد، جی. سرشار، م. سیستم مدیریت پل مبتنی بر سیستم اطلاعات جغرافیایی (GIS). محاسبه کنید. کمک مدنی زیرساخت. مهندس 1999 ، 14 ، 417-427. [ Google Scholar ] [ CrossRef ]
- شیونگ، دی. Floyd, R. توسعه پایگاه داده ویژگی ها و ویژگی های بزرگراه با استفاده از فناوری های سنجش از دور تجاری، همراه با نقشه برداری موبایل، GIS و GPS . Oak Ridge National Laboratory: Oak Ridge, TN, USA, 2004. [ Google Scholar ]
- ساباتینی، ر. ریچاردسون، MA; گردی، ع. Ramasamy، S. سنسورهای لیزر هوابرد و سیستم های یکپارچه. Prog. هوانوردی علمی 2015 ، 79 ، 15-63. [ Google Scholar ] [ CrossRef ]
- Eitel، JUH; هوفل، بی. ویرلینگ، لس آنجلس; آبلان، ا. آسنر، GP; Deems، JS; گلنی، CL; Joerg، PC; LeWinter، AL; Magney، TS; و همکاران Beyond 3-D: طیف جدید کاربردهای لیدار برای علوم زمین و اکولوژیکی. سنسور از راه دور محیط. 2016 ، 186 ، 372-392. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- Biron، PM; چونه، جی. Buffin-Bélanger، T. دمرز، اس. اولسن، تی. بهبود ارزیابی هیدروژئومورفولوژیکی جریان ها با استفاده از DEMs LiDAR. زمین گشت و گذار. روند. Landf. 2013 ، 38 ، 1808-1821. [ Google Scholar ] [ CrossRef ]
- آواز فرنسویچ، م. اشمور، پی. ایجاد و ارزیابی نقشه برق جریان مبتنی بر مدل ارتفاع دیجیتال به عنوان ابزار ارزیابی جریان. River Res. Appl. 2012 ، 28 ، 1394–1416. [ Google Scholar ] [ CrossRef ]
- جکسون، اس. حذف گودال بهینه V1. 5.1 آموزش. مرکز تحقیقات منابع آب دانشگاه تگزاس در آستین. در دسترس آنلاین: https://tools.crwr.utexas.edu/OptimizedPitRemoval/CRWR%20Tools%20Optimized%20Pit%20Removal.html (در 6 فوریه 2013 قابل دسترسی است).
- Poppenga، SK; Worstell، BB; استوکر، جی.ام. Greenlee، SK با استفاده از روشهای زهکشی انتخابی برای استخراج جریان سطحی پیوسته از دادههای ارتفاعی دیجیتال 1 متری مشتق از Lidar . سازمان زمین شناسی ایالات متحده: Reston، VA، ایالات متحده آمریکا، 2010. [ Google Scholar ]
- لیندسی، JB عمل سوزاندن جریان DEM دوباره مورد بازبینی قرار گرفت. فرآیند سطح زمین Landf. 2016 ، 41 ، 658-668. [ Google Scholar ] [ CrossRef ]
- لیدبرگ، دبلیو. نیلسون، ام. لوندمارک، تی. Ågren، AM ارزیابی روشهای پیش پردازش مدلهای ارتفاعی دیجیتال برای مدلسازی هیدرولوژیکی. هیدرول. روند. 2017 ، 31 ، 4660-4668. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- لیندسی، جی بی. Dhun، K. مدلسازی الگوهای زهکشی سطحی در مناظر تغییر یافته با استفاده از LiDAR. بین المللی جی. جئوگر. Inf. علمی 2015 ، 29 ، 397-411. [ Google Scholar ] [ CrossRef ]
- سفید، بی. اوگیلوی، جی. کمپبل، DM; هیلتز، دی. گوتیه، بی. Chisholm، HKH; ون، هنگ کنگ؛ مورفی، PN; Arp، PA با استفاده از شاخص نقشهکشی عمق به آب برای تعیین محل نهرهای کوچک و مناطق مرطوب مرتبط در سراسر مناظر. می توان. منبع آب جی. کشیش کن. رسور. Hydr. 2012 ، 37 ، 333-347. [ Google Scholar ] [ CrossRef ]
- MacFaden، S. LandLandcov_NFLLAKELCLU. در دسترس آنلاین: https://maps.vcgi.vermont.gov/gisdata/metadata/LandLandcov_NFLLAKELCLU.xml (در 6 فوریه 2021 قابل دسترسی است).
- استوکر، جی. هاردینگ، دی. پریش، جی. برای مجموعه داده ملی لیدار. فتوگرام مهندس Remote Sens. 2008 , 74 , 1067. [ Google Scholar ]
- کراسبی، سی جی; Arrowsmith، JR; Nandigam، V. فصل 11 – صفر تا یک تریلیون: پیشرفت مطالعات فرآیند سطح زمین با دسترسی آزاد به توپوگرافی با وضوح بالا. در تحولات در فرآیندهای سطح زمین ; Tarolli, P., Mudd, SM, Eds. الزویر: آمستردام، هلند، 2020؛ جلد 23، ص 317–338. [ Google Scholar ]
- کریشنان، اس. کراسبی، سی. ناندیگام، وی. فان، ام. کوارت، سی. بارو، سی. Arrowsmith، R. OpenTopography: معماری سرویس گرا برای دسترسی جامعه به توپوگرافی LIDAR. در مجموعه مقالات دومین کنفرانس بین المللی محاسبات برای تحقیقات و کاربردهای جغرافیایی، واشنگتن، دی سی، ایالات متحده آمریکا، 23 تا 25 مه 2011. صص 1-8. [ Google Scholar ]
- O’Neil-Dunne, J. نقشه برداری از سطوح نفوذناپذیر در حوضه دریاچه Champlain . گزارش نهایی برنامه حوضه دریاچه Champlain، گزارش فنی شماره 76; برنامه حوضه دریاچه Champlain: Grand Isle، VT، ایالات متحده آمریکا، 2013. [ Google Scholar ]
- کمیسیون ها، VRP TransStructures_BCVOBCIT. در دسترس آنلاین: https://vtculverts.org/structures (در 2 فوریه 2021 قابل دسترسی است).
- آنگلوف، دی. دولونگ، سی. فیلیپ، دی. فروه، سی. لافون، اس. لیون، آر. اوگال، ا. وینسنت، ال. ویور، جی. نمای خیابان گوگل: ثبت جهان در سطح خیابان. کامپیوتر 2010 ، 43 ، 32-38. [ Google Scholar ] [ CrossRef ]
- وودرو، ک. لیندسی، جی بی. برگ، AA ارزیابی تکنیک های تهویه DEM، داده های منبع ارتفاع و وضوح شبکه برای استخراج پارامتر هیدرولوژیکی در مقیاس میدانی. جی هیدرول. 2016 ، 540 ، 1022-1029. [ Google Scholar ] [ CrossRef ]
- Verdin، KL; Jenson, S. توسعه DEM های مقیاس قاره و استخراج ویژگی های هیدروگرافی. در مجموعه مقالات سومین کنفرانس بین المللی/کارگاه آموزشی ادغام GIS و مدلسازی محیطی، سانتافه، NM، ایالات متحده آمریکا، 21-26 ژانویه 1996; صص 1-12. [ Google Scholar ]
- Lindsay، JB Whitebox GAT: مطالعه موردی در تحلیل ژئومورفومتریک. محاسبه کنید. Geosci. 2016 ، 95 ، 75-84. [ Google Scholar ] [ CrossRef ]
- دوک، جی دی. Kienzle، SW; جانسون، دی.ال. Byrne, JM بهبود مسیریابی جریان زمینی با ترکیب داده های جاده ای کمکی در مدل های ارتفاعی دیجیتال. جی. اسپات. هیدرول. 2003 ، 3 ، 23-49. [ Google Scholar ]
- Bettinger، P. مری، ک. Boston, K. (Eds.) فصل 7- توسعه و تعمیم نقشه. در نقشه برداری سیستم های انسانی و طبیعی ; مطبوعات دانشگاهی: کمبریج، MA، ایالات متحده آمریکا، 2020؛ صص 255-281. [ Google Scholar ] [ CrossRef ]
- دوک، جی دی. Kienzle، SW; جانسون، دی.ال. Byrne, JM ترکیب داده های کمکی برای اصلاح مسیرهای جریان زمینی اصلاح شده انسانی. هیدرول. روند. 2006 ، 20 ، 1827-1843. [ Google Scholar ] [ CrossRef ]
- سلام.؛ آهنگ، ز. Liu, Z. به روز رسانی موجودی دارایی بزرگراه با استفاده از LiDAR در هوا. اندازه گیری 2017 ، 104 ، 132-141. [ Google Scholar ] [ CrossRef ]
- Persendt، FC; گومز، سی. ارزیابی استخراجهای شبکه زهکشی در منطقه کمنقص حوضه کوولای (نامیبیا) از منابع متعدد: LiDAR، نقشههای توپوگرافی، و عکسهای ارتوپدی دیجیتال. ژئومورفولوژی 2016 ، 260 ، 32-50. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- آماتیا، دی. ترتین، سی. پاندا، اس. Ssegane, H. کاربرد داده های LiDAR برای ارزیابی های هیدرولوژیکی ویژگی های زهکشی حوضه آبخیز ساحلی با گرادیان کم. جی. جئوگر. Inf. سیستم 2013 ، 5 ، 175-191. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
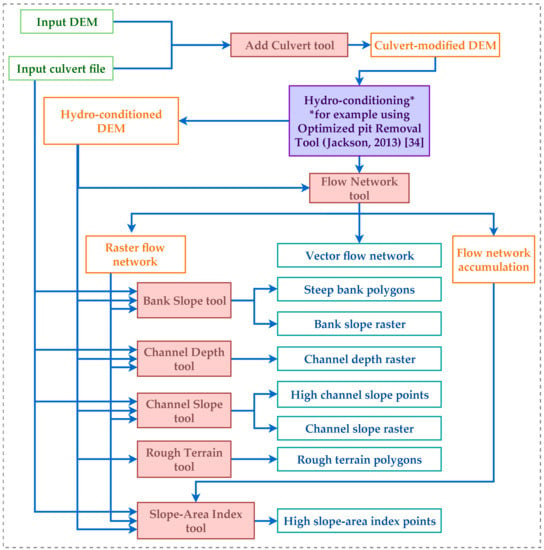
شکل 1. گردش کار خودکار جعبه ابزار ژئومورفولوژی توسعه یافته توسط سازمان زمین شناسی ایالات متحده (USGS) [ 12 ، 34 ].
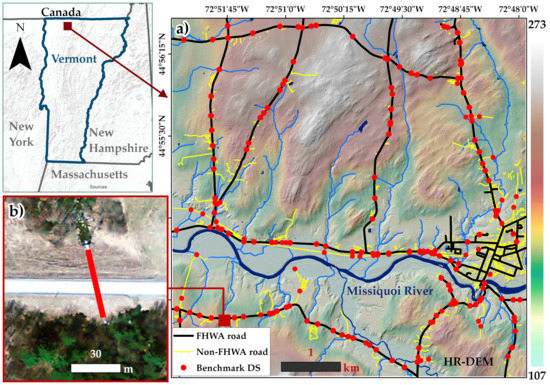
شکل 2. منطقه مورد مطالعه در شمال ورمونت، ایالات متحده آمریکا. ( الف ) مدل ارتفاع دیجیتال با وضوح بالا (HR-DEM) که از دادههای اسکن لیزری هوابرد (ALS)، خطوط مرکزی جاده مقامات بزرگراه فدرال (FHWA) (خطوط سیاه) و جادههای غیر FHWA (خطوط زرد) به دست آمده است. نقاط قرمز مجموعه داده ساختار زهکشی معیار (DS) را با مکان ها و جهت گیری های DS نشان می دهد همانطور که در ( b ) نشان داده شده است، یک نقشه درونی یک DS.
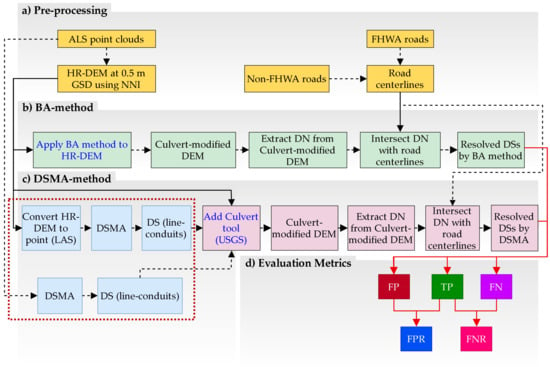
شکل 3. گردش کار تحقیق پیشنهادی. ( الف ) پیش پردازش ابرهای نقطه ALS و مجموعه داده های خط مرکزی جاده. ( ب ) پردازش HR-DEM برای تولید DEM اصلاح شده با پلک با استفاده از روش BA. ( ج ) پردازش HR-DEM و ALS ابرها را برای نقشه برداری از DS ها به منظور ایجاد DEM اصلاح شده با پلک با استفاده از روش DSMA نشان می دهد. ( د ) معیارهای ارزیابی DEM های اصلاح شده با پلک پردازش شده برای روش های ( b ) و ( c ).
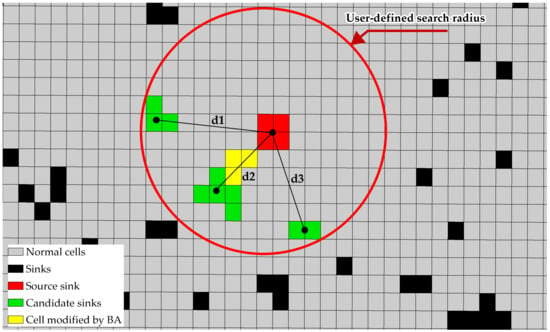
شکل 4. نمودار شماتیک روش الگوریتم شکست (BA) برای تثبیت سینک در یک DEM مرتبط با DSs.

شکل 5. ورودی HR-DEM برای روش BA. ( الف ) DEM اصلاحشده با کولورت با استفاده از روش BA. ( ب ) شبکه زهکشی (DN) که از یک DEM اصلاح شده با پلک محاسبه شده است. ( ج ) یک معیار DS (خط قرمز) در مقایسه با DN (خط آبی) از DEM اصلاح شده با پلک.
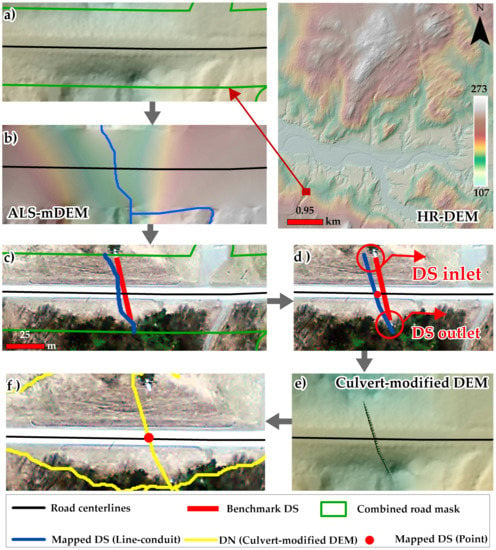
شکل 6. چارچوب به دست آوردن یک DEM اصلاح شده با پلک با استفاده از DS های نقشه برداری شده از روش الگوریتم نقشه برداری ساختار زهکشی (DSMA). ( الف ) DEM اصلاح شده با ALS (ALS-mDEM) از روش DSMA [ 14 ]. ( ب ) شبکه زهکشی (DN) از ALS-mDEM از روش DSMA. ( ج ) نقشه برداری DS ها در مجراهای خط با استفاده از DSMA. ( د ) DS های نقشه برداری شده در مجراهای خط به 5 متر تعمیم داده شدند. ( ه ) DEM اصلاح شده توسط Culvert که با استفاده از مجراهای خط DS به عنوان ورودی ابزار add culvert USGS به دست آمده است ( شکل 1 ). ( f ) DNهای استخراج شده از DEM اصلاح شده توسط پلک برای یافتن کل DSها (نقاط قرمز) با تقاطع DNها با خطوط مرکزی جاده.

شکل 7. ( الف ) DS ها به درستی با روش های BA و DSMA در DEM های اصلاح شده با پلک مربوطه خود حل شدند. ( b ، c ) DS ها به درستی با استفاده از داده های DS مبتنی بر DSMA (TP، خط زرد) و FN (خط آبی) برای روش BA در Case-1 حل شدند.

شکل 8. DS ها به درستی (TP، خط زرد) با داده های DS مبتنی بر DSMA در مقایسه با روش BA (FN، خط آبی) حل شدند.

شکل 9. موارد FP منشاء گرفته از DEM اصلاح شده با پلک که با استفاده از روش BA به دست آمده است.


بدون دیدگاه