

خلاصه
پوشش زمین متغیر مهمی از اکوسیستم زمینی است که اطلاعاتی را برای مدیریت منابع طبیعی، تشخیص پراکندگی شهری و تحقیقات محیطی فراهم می کند. طبقهبندی پوشش زمین با تصاویر سنجش از دور چندطیفی با وضوح فضایی بالا به دلیل مقادیر طیفی ناهمگون از همان جسم روی زمین، مشکلی دشوار است. شبکه های کاملاً کانولوشنال (FCNs) یک روش پیشرفته هستند که به طور فزاینده ای در تقسیم بندی و طبقه بندی تصاویر استفاده می شود. با این حال، یک مقایسه کمی سیستماتیک از FCN ها در تصاویر از راه دور چند طیفی-فضایی بالا هنوز انجام نشده است. در این مقاله، ما سه FCN (FCN-8s، Segnet و Unet) را برای طبقهبندی تصاویر ماهوارهای Gaofen-2 (GF2) اتخاذ کردیم. دو صحنه از GF2 با مجموعا 3329 نمونه چند ضلعی در منطقه مورد مطالعه استفاده شد و یک مقایسه کمی سیستماتیک از FCN ها با ورودی های قرمز، سبز، آبی (RGB) و RGB + مادون قرمز نزدیک (NIR) برای تصاویر ماهواره ای GF2 انجام شد. نتایج نشان داد که: (1) روشهای FCN در طبقهبندی پوشش زمین با تصاویر GF2 به خوبی عمل میکنند، و با این حال، معماریهای مختلف FCN نتایج متفاوتی را در دقت نقشهبرداری نشان میدهند. مدل FCN-8s بهترین عملکرد را در بین معماریهای Segnet و Unet به دلیل کانالهای ویژگی چند مقیاسی در مرحله نمونهبرداری داشت. به طور میانگین در بین مدل ها، دقت کلی ( و با این حال، معماری های مختلف FCN نتایج متفاوتی را در دقت نقشه برداری نشان دادند. مدل FCN-8s بهترین عملکرد را در بین معماریهای Segnet و Unet به دلیل کانالهای ویژگی چند مقیاسی در مرحله نمونهبرداری داشت. به طور میانگین در بین مدل ها، دقت کلی ( و با این حال، معماری های مختلف FCN نتایج متفاوتی را در دقت نقشه برداری نشان دادند. مدل FCN-8s بهترین عملکرد را در بین معماریهای Segnet و Unet به دلیل کانالهای ویژگی چند مقیاسی در مرحله نمونهبرداری داشت. به طور میانگین در بین مدل ها، دقت کلی (OA ) و ضریب کاپا ( کاپا ) در مقایسه با دو مدل دیگر به ترتیب 5% و 0.06 در FCN-8 بیشتر بود. (2) تصاویر سنجش از راه دور با وضوح فضایی بالا با باندهای RGB+NIR بهتر از ورودی RGB در نقشهبرداری پوشش زمین عمل میکنند، اما مزیت آن محدود بود. OA و Kappa تنها به طور متوسط 0.4% و 0.01 در باندهای RGB+NIR افزایش یافتند . (3) تصاویر GF2 یک نتیجه دلگرم کننده در تخمین پوشش زمین بر اساس روش FCN-8s ارائه کرد که می تواند برای نقشه برداری پوشش زمین در مقیاس بزرگ در آینده مورد بهره برداری قرار گیرد.
کلید واژه ها:
یادگیری عمیق ؛ طبقه بندی ; پوشش زمین ؛ شبکه کانولوشن کامل ; Unet ; Segnet ; FCN
1. معرفی
پوشش زمین یک متغیر مهم اکوسیستم زمینی است و اطلاعاتی را برای مدیریت منابع طبیعی، تشخیص پراکندگی شهری و تحقیقات زیست محیطی فراهم می کند [ 1 ]. نقشه های پوشش زمین با وضوح خوب و تغییر آنها در طول زمان می تواند اطلاعات بیشتری را برای مدیریت زمین ارائه دهد. با این حال، نقشه برداری از نقشه پوشش زمین در مقیاس محلی یا جهانی به دلیل فقدان داده های بزرگ مقیاس منطقه ای برای بوم شناسان یک مشکل بود [ 2 ].
سنجش از دور به مدت طولانی به عنوان یک راه خوب برای حل این مشکل شناخته شده است. طبقه بندی پوشش زمین با تصاویر سنجش از دور یک موضوع تحقیقاتی گسترده در جهان است [ 3 ، 4 ، 5 ، 6 ، 7 ]. انواع محصولات پوشش زمین از حسگرهای مختلف در مقیاس جهانی یا منطقه ای تولید می شوند، مانند طیف سنج تصویربرداری با وضوح متوسط (MODIS) محصول نوع پوشش زمین (MCD12Q1) [6]، پوشش زمین گلوب 30-2010 (GLC30) مشتق شده از Landsat. تصاویر سری [ 1 ]، و مشاهده و نظارت با وضوح بهتر پوشش جهانی زمین (FROM-GLC) برگرفته از تصاویر سنتینل [ 8 ، 9]].
تعداد انواع پوشش زمین طبقه بندی شده و دقت محصولات طبقه بندی اغلب به دلیل تفکیک فضایی درشت آن محدود است. MCD12Q1 پوشش جهانی زمین را با وضوح مکانی 500 متر در گام زمانی سالانه برای 17 نوع پوشش زمین، از جمله 11 نوع پوشش گیاهی طبیعی، سه نوع زمین توسعه یافته و بی نظم، و سه نوع زمین بدون پوشش گیاهی فراهم می کند. GLC30 یک محصول پوشش زمین با وضوح 30 متر را در مقیاس جهانی با سال پایه 2010 ارائه می دهد و شامل 10 نوع پوشش زمین است. محصولات FROM-GLC تولیدات پوشش زمین با وضوح 30 متر و 10 متر را ارائه می دهند که شامل 10 نوع کلاس است. طرح های طبقه بندی در مقیاس جهانی یا منطقه ای کافی است. با این حال، آنها برای تشخیص انواع جنگلها یا گونههای مختلف محصول در منطقه بسیار درشت هستند و به دلیل ناهمگونی مناظر،1 ، 2 ، 9 ].
با توسعه فناوری سنجش از دور، تعداد زیادی تصویر با وضوح بالا (کمتر از 10 متر) را می توان در مدت کوتاهی جمع آوری کرد، مانند ماهواره برای مشاهده زمین (SPOT)، جهان بینی، و Gaofen-2 (GF2). تصاویر [ 10 ، 11 ، 12 ]. ماهواره GF2 که در سال 2014 پرتاب شد و با دو سنسور دوربین پانکروماتیک و چند طیفی (CCD) پیکربندی شده است، یک ماهواره نوری با وضوح بالا چینی است و می تواند در حالت پانکروماتیک به وضوح فضایی 1 متر و وضوح 4 دست یابد. متر در چهار باند طیفی در حالت چند طیفی با عرض نوار 45 کیلومتر [ 13]. داده های GF2 دارای زمان بازبینی فرکانس بالا پنج روزه است. وضوح فضایی بالا و زمان بازبینی فرکانس بالا، و همچنین توانایی پوشش گسترده داده های GF2، آنها را به منابع داده بسیار مناسب برای تشخیص تغییر پوشش زمین تبدیل می کند. بنابراین، توسعه یک الگوریتم طبقه بندی برای GF2 ضروری است. اخیراً، محققان بر روی نقشه پوشش زمین با تصاویر ماهواره ای با وضوح فضایی خوب تمرکز کردند [ 7 ، 10 ، 12 ، 14 ، 15 ، 16 ، 17 ].
به طور کلی، روشهای طبقهبندی پوشش زمین را میتوان به دو روش طبقهبندی کرد، روشهای غیرعمیق و روشهای یادگیری عمیق [ 18 ، 19 ]. در روشی غیرعمیق، روشهای اولیه به روشهای مبتنی بر تک پیکسل و مبتنی بر شی متکی هستند. الگوریتمهای مبتنی بر تک پیکسل عمدتاً بر روی امضای طیفی تمرکز میکنند و برای تصاویر وضوح فضایی متوسط یا درشت استفاده میشوند. این ممکن است منجر به طبقه بندی اشتباه پیکسل ها به دلیل امضاهای طیفی مشابه اشیاء مختلف شود. روشهای مبتنی بر شی عمدتاً برای تصاویر با وضوح فضایی بالا استفاده میشوند که الگوهای فضایی را با امضاهای طیفی در یک الگوریتم طبقهبندی در نظر میگیرند.
تمام ویژگیهای استخراجشده از روش مبتنی بر شی به طبقهبندیکنندهها، مانند ماشین بردار پشتیبان (SVM) یا جنگل تصادفی (RF)، برای طبقهبندی انواع پوشش زمین داده شد. این رویکردها در تصاویر با وضوح فضایی بالا دستاوردهای خوبی در طبقه بندی پوشش زمین نشان دادند [ 10 ، 20 ]. با این حال، پارامترهای (حداقل اندازه یک شی) تعریف شده در روش مبتنی بر شی نیز محدودیتی بود که مناطق کوچکتر از حداقل اندازه را رد می کرد. روش مبتنی بر شی نیز یک روش مشتق شده از ویژگی های سطح پایین است که در آن دقت طبقه بندی به نتایج بخش شی بستگی دارد.
الگوریتمهای یادگیری عمیق (DL) که از شبکههای عصبی عمیق (DNN) استفاده میکنند به سرعت در سالهای اخیر توسعه یافتند و در بسیاری از وظایف تحلیل تصویر، بهویژه در طبقهبندی صحنه، تشخیص اشیا و طبقهبندی پوشش زمین به موفقیت چشمگیری دست یافتند [18 ، 19 ، 21 ] . مزیت اساسی DL این است که می تواند به طور خودکار ویژگی ها را با استفاده از یک حلقه بهینه سازی از داده ها استخراج کند، که می تواند کارایی را در مقایسه با روش های استخراج دستی ویژگی بهبود بخشد.
شبکههای عصبی کانولوشنال (CNN) شناختهشدهترین روشهای یادگیری عمیق برای استخراج ویژگی، به ویژه برای ویژگیهای فضایی دوبعدی، با استفاده از سلسله مراتبی از فیلترهای کانولوشنال با تبدیلهای غیرخطی هستند. CNN ها در طبقه بندی تصاویر به ویژه برای طبقه بندی صحنه موثر هستند. CNN های مبتنی بر پچ معمولاً در طبقه بندی تصاویر در سطح پیکسل استفاده می شوند. با این حال، CNN های مبتنی بر پچ به دلیل همپوشانی متراکم اندازه وصله در پردازش کل تصاویر سنجش از راه دور ناکارآمد هستند.
اخیراً، شبکههای کاملاً کانولوشنال (FCN) برای غلبه بر معایب در CNNهای مبتنی بر پچ پیشنهاد شدهاند. FCN ها یک روش ابتکاری برای پرداختن به طبقه بندی مبتنی بر پیکسل در یک رویکرد انتها به انتها، با پیشنهاد یک معماری نمونه پایین و سپس نمونه بالا در رمزگذار رمزگذار هستند. با مقایسه CNN و FCN، محققان دریافتند که هر دو دارای لایههای رمزگذار هستند که برای استخراج ویژگیها از تصویر با استراتژی نمونهبرداری پایین استفاده میشوند، در حالی که FCN حاوی لایههای رمزگشا است که از اتصالات پرش برای ترکیب کردن اطلاعات از لایههای رمزگذار در شبکه استفاده میکند و تصویر را به نمونه ارتقا میدهد. اندازه اصلی
چندین معماری FCN در سال های اخیر پیشنهاد شده است. FCN-8s، FCN-16s، FCN-32s، Segnet و Unet موارد رایجی هستند که در طبقه بندی مبتنی بر پیکسل استفاده می شوند [ 22 ، 23 ]. این معماری ها در مرحله رمزگذار مشابه هستند اما در مرحله رمزگشا متفاوت هستند. با وجود بسیاری از مدلهای پیشنهادی که در مطالعات قبلی گزارش شدهاند، مقایسه کمی سیستماتیک این FCNs به خوبی انجام نشده است. اکثر شبکه های از پیش آموزش داده شده در حال حاضر به داده های ورودی قرمز، سبز و آبی (RGB) محدود می شوند و تعداد کمی از تصاویر ماهواره ای طیفی به عنوان ورودی، به ویژه برای باند مادون قرمز نزدیک (NIR) استفاده کرده اند.
اهداف این مقاله عبارت بودند از: (1) ارزیابی پتانسیل FCN ها بر روی تصاویر GF2 در طبقه بندی پوشش زمین. (2) برای انجام یک مقایسه کمی سیستماتیک بین FCN های مختلف. (3) برای مقایسه دقت طبقه بندی هنگام تغذیه RGB و RGB + NIR به عنوان ورودی برای تصاویر ماهواره ای GF2.
2. مواد و روشها
2.1. حوزه و داده های مطالعه
این مطالعه در شهر شین شیانگ در استان هنان در مرکز چین انجام شد (35°27’11’N-35°45’43’N، 113°27’32’ E-113°39’25” شرقی). ویژگی های پوشش زمین در این منطقه، چشم انداز جنگلی سنتی و موزاییک زمین های کشاورزی با روستاهای مرکزی چین است که آزمون خوبی برای طبقه بندی است.
ما از دو صحنه از تصاویر GF2 در منطقه مورد مطالعه استفاده کردیم ( شکل 1 ) که در 1 آوریل 2017 به دست آمدند. نمونه های آموزشی فقط از S2 انتخاب شدند و نمونه های آزمایشی هر دو از S1 و S2 برای آزمایش آموزش انتخاب شدند. توانایی انتقال اندازه تصویر دو صحنه 7300 × 6908 پیکسل بود. هر دو صحنه با روش تصحیح جوی سریع و تصحیح هندسی در ENVI 5.3 (Exelis Visual Information Solutions, Boulder, CO, USA) پیش پردازش شدند.
2.2. کلاس های پوشش زمین
سیزده طبقه پوشش زمین غالب در منطقه تحقیقاتی شامل غلات (CL)، زمین چمن (GL)، زمین صنوبر (PL)، مسیر در زمین کشاورزی (PF)، جاده نفوذ ناپذیر (IR)، جنگل های پراکنده (SW)، جنگل های متراکم وجود دارد. (DW)، آب (WB)، کانال بدون آب (WC)، تأسیسات حفاظت از آب (WF)، زمین ساختمانی (CD)، گلخانه (GH) و زمین برهنه (BL) (جدول 1 ) .
یک روش حاشیه نویسی صنایع دستی برای تولید داده های مرجع انجام شد. ما به صورت دستی چند ضلعی ها را برای کلاس های مختلف پوشش زمین دیجیتالی کردیم. به منظور به دست آوردن نمونه های نماینده بیشتر، ما تا آنجا که ممکن است تغییرات هر طبقه را یادداشت کردیم و از مخلوط کردن طبقات پوشش زمین تعریف شده اجتناب کردیم. پس از آن، چند ضلعیهای برچسبگذاریشده با همان وضوح تصویر ورودی شطرنجی شدند. اطلاعات دقیق در مورد هر کلاس در جدول 1 توضیح داده شده است .
2.3. معماری FCN ها
چندین معماری FCN در سال های اخیر پیشنهاد شده است. FCN-8s، FCN-16s، FCN-32s، Segnet و Unet موارد رایجی بودند که در طبقهبندی مبتنی بر پیکسل استفاده میشدند. این معماری ها در مرحله رمزگذار مشابه هستند اما در مرحله رمزگشا متفاوت هستند ( شکل 2 ).
FCN-8s، FCN-16s و FCN-32s اولین نسل از معماریهای FCN بودند [ 24 ]. این شبکهها لایه پیشبینی نهایی را با لایههای پایینتر با گامهای ظریفتری در مرحله نمونهبرداری ترکیب کردند. FCN-8 و FCN-16 دارای دو و یک اتصال پرش هستند و به ترتیب در گام های 8 و 16 با اضافه کردن یک لایه upsampling 2 × 2 که اطلاعات معنایی یک لایه عمیق و درشت را با اطلاعات ظاهری به دست آمده از کم عمق و ریز جمع می کند، نمونه برداری می کنند. لایه های. FCN-32s نقشههای برچسبدار مبتنی بر پیکسل متراکم را بدون اتصال پرش در گام 32 با افزودن یک لایه 2 × 2 upsampling تولید کردند ( شکل 2 a).
Segnet یکی دیگر از معماری های FCN است که از پارادایم رمزگذار-رمزگشا پیروی می کند. Segnet از شاخصهای max-pooling حفظ شده استفاده میکند که محل حداکثر مقدار ویژگی در هر عملیات max-pooling در طول مرحله رمزگذار هستند تا نمونهبرداری غیرخطی را در مرحله رمزگشایی انجام دهد (شکل 2 ب ) .
Unet یک معماری شبکه عصبی کاملاً کانولوشن اصلاح شده است که قبلاً برای وظایف تقسیمبندی تصویر زیست پزشکی استفاده میشد [ 23 ]. نوآوری معماری Unet این بود که نقشههای ویژگی سطح پایین در مرحله رمزگشا، آنها را با نقشههای سطح بالاتر در مرحله معادل در مرحله رمزگذار در طول فرآیند نمونهبرداری به هم پیوند میداد، که اطلاعات از دست رفته را در لایه حداکثر نظرسنجی جبران میکرد و فعال میکرد. محلی سازی دقیق با روش الحاقی، بسیاری از کانالهای ویژگی یک بخش نمونهبرداری را تولید کردند که امکان انتشار اطلاعات زمینه را به لایههای با وضوح بالاتر میداد ( شکل 2 ج).
قابل ذکر است که تمام لایههای کانولوشن شبکه با نرمالسازی دستهای، تابع غیر خطی اصلاحشده (ReLU) و حذف دنبال شدند، زیرا نرمالسازی دستهای سرعت آموزش را افزایش میدهد و حساسیت شبکه به مقداردهی اولیه را کاهش میدهد و لایه حذف به کاهش مقدار کمک میکند. بیش از حد.
2.4. معیارهای ارزیابی
ما از دقت کلی ( OA )، ضریب کاپا ( کاپا )، دقت دقیق ( PA )، و دقت یادآوری ( RA ) برای ارزیابی کمی نتایج تجربی استفاده کردیم. علاوه بر این، متریک ترکیبی از هر کلاس F 1 نیز ارائه شد (معادلات (1) – (5)).
دقت کلی مقدار پیکسلهایی که به درستی برچسبگذاری شدهاند را در تمام پیکسلهای حقیقت زمینی کمیت میدهد. ضریب کاپا نشان دهنده میزان توافق بین داده های حقیقت زمینی و نقشه برچسب گذاری شده نهایی است که توافق شانس بین کلاس ها را جبران می کند. امتیاز F 1 یک میانگین هارمونیک بین دقت و یادآوری است. برای کلاس های نامتعادل مفید است.
Oآ=∑کایکسمنمنن
کآپپآ=ن∑کایکسمنمن-∑کایکس من+∑کایکس+من ن2-∑کایکس من+∑کایکس+من
پآ=تیپتیپ+افپ
آرآ=تیپتیپ+افن
اف1=2×پآ×آرآپآ+آرآ
در اینجا N تعداد کل پیکسل ها در تمام کلاس های حقیقت زمینی، k تعداد کلاس ها، x ii تعداد پیکسل های کلاس i است که به درستی در کلاس i طبقه بندی شده اند، x i + است. تعداد پیکسل های حقیقت زمین در کلاس i و x + i مجموع پیکسل های طبقه بندی شده در کلاس i است .
برای هر کلاس، TP تعداد مثبت واقعی، FP تعداد مثبت کاذب و FN تعداد منفی کاذب است.
3. نتایج
3.1. نتایج طبقه بندی و ارزیابی بصری
نقشه های طبقه بندی نهایی روش های مختلف برای مکان های مورد مطالعه به دست آمد. برای ارائه تجسم بهتر، چهار زیر مجموعه با ورودی های باند متفاوت مقایسه شدند. شکل 3 (باندهای RGB برای ورودی) و شکل 4 (باندهای RGB+NIR برای ورودی) نتایج مختلف طبقهبندی نوع زمین طبقهبندیکنندههای مختلف را نشان میدهند.
برخلاف باندهای ورودی مختلف، نتایج طبقهبندی FCN در همه مکانهای مطالعه، جلوههای بصری صاف با کمترین نویز لکهای را نشان میدهند که در شکل 3 و شکل 4 نشان داده شده است . ما نتوانستیم تفاوت های آشکاری را در نتایج طبقه بندی از ارزیابی بصری پیدا کنیم. علاوه بر این، 13 کلاس، چه تکه های بزرگ یا کوچک بودند، به دقت در ورودی های سه باند یا چهار باند متمایز شدند. کلاس های خطی (PY و IR) نیز به خوبی متمایز بودند.
با این حال، عملکرد روش های مختلف سازگار نبود. برخلاف Segnet و FCN-8s، ما دریافتیم که نتایج طبقهبندی Unet حاوی چند نویز نامطلوب است و PY و CL با یکدیگر اشتباه گرفته شدهاند. GL به اشتباه به عنوان DW و GH به عنوان CD در نتایج طبقه بندی Unet طبقه بندی شد. پیکسل های خاصی در کلاس خطی (PY) نیز به وضوح طبقه بندی نشده بودند.
با توجه به نتایج Segnet و FCN-8s، تمام مشکلات طبقهبندی اشتباه تولید شده توسط مدل Unet با دقت بالاتری حل شد. بنابراین، طبقه بندی های نادرست که در شکل 4 نشان داده شده اند ، بر این اساس تجدید نظر شدند.
3.2. ارزیابی دقت طبقه بندی
عملکرد طبقه بندی همه روش ها از طریق ارزیابی کمی مورد بررسی قرار گرفت. جدول 2 ارزیابی دقت طبقهبندی را فهرست میکند، از جمله دقت کلی ( OA )، ضریب کاپا ( کاپا )، و دقت طبقاتی ( PA )، یادآوری ( RA )، و امتیاز F 1 ( F1 ).
از جدول، هنگام در نظر گرفتن معیارهای OA و Kappa ، متوجه شدیم که رویکرد FCN-8s بهترین طبقهبندی را در بین Segnet و Unet گزارش میکند. میانگین OA و Kappa در مدل های FCN-8 به ترتیب 5% و 0.06 بیشتر از دو مدل دیگر بود. در رویکرد FCN-8s، OA و Kappa به ترتیب تا 94.2٪ و 0.93 در ویژگی های ورودی چهار باند، و 93.9٪ و 0.92 در ویژگی های ورودی سه باند بودند. ویژگیهای ورودی چهار باند برای طبقهبندی به ارتقای دقت بیش از سه ویژگی ورودی باند، چه در FCN-8s، Segnet، یا Unet کمک کردند، اگرچه افزایش دقت ناچیز بود. افزایش دقت درOA و Kappa در رویکرد FCN-8s 0.3% و 0.01، در رویکرد Segnet 0.2% و 0.01 و در رویکرد Unet 0.9% و 0.01 بودند.
به طور خاص، با در نظر گرفتن دقت کلاس زمین در آزمایشهای مختلف، معیارهای PA ، RA و F 1 متفاوت عمل کردند. همانطور که در جدول 2 نشان داده شده است ، CL، GL، DW، WB، WC، WF، و CD معیارهای بالای PA ، RA و F 1 را گزارش کردند (در اکثر موارد > 0.9)، در حالی که PL، SW، GH، و BL موارد کوچکتر را گزارش کردند. . در مقابل، PY و IR به نرخهای دقت پایینتری (کمتر از 0.8) منجر شدند که در جدول 2 با صورتی-قرمز مشخص شدهاند . روش FCN-8s بهترین عملکرد را برای همه کلاسها به ویژه برای GL، PL و SW نشان داد، در حالی که روش Segnet به بهبود PA کمک کرد .متریک در کلاس های PY، IR، WB و WC. مدل Unet عملکرد خوبی در کلاس های CL، WB، WF و CD داشت. با این حال، اضافه کردن باند NIR در طبقه بندی افزایش قابل توجهی در دقت همه کلاس ها نشان نداد. در مقابل، متریک RA در کلاس PY هنگام استفاده از FCN-8 0.18 کاهش یافت.
شکل 5 و شکل 6 ماتریس های سردرگمی نرمال شده را برای سه روش با باندهای ورودی مختلف نشان می دهند. همانطور که در شکل 5 و شکل 6 نشان داده شده است، در همه کلاس ها بین این روش ها تفاوت وجود دارد. هر سه روش به طور دقیق کلاس های CL، DW، CD را با دقت بیش از 90٪ متمایز کردند و با این حال، FCN-8s پیشرفت های جزئی را برای GL، SW، WB، و WC در مقایسه با روش های Segnet و Unet و کلاس WF نشان داد. بدترین در رویکرد Segnet. با این حال، کلاس PY در روش های طبقه بندی بدترین عملکرد را داشت. بهترین دقت PY 0.7 در رویکرد FCN-8s با سه ویژگی ورودی باند بود. این احتمالاً به دلیل کمترین تعداد نمونه آموزشی برای این کلاس نسبت به سایر طبقات پوشش زمین در این مطالعه بود.
ما متوجه شدیم که PY عمدتا با CL و در مرحله دوم با GL و DW اشتباه گرفته می شود. ما همچنین دریافتیم که افزودن باند NIR به بهبود دقت PY کمکی نمی کند. برعکس، اندکی کاهش یافت. این احتمالاً به این دلیل است که این کلاسهای PY و CL پشت سر هم مجاور بودند، PY نیز یک شکل خطی بود، و تمایز امضاها در باند NIR و R دشوار بود.
4. بحث
به طور کلی، روشهای FCN در طبقهبندی پوشش اراضی عالی عمل کردند. این با بسیاری از نتایج محققان در زمینه نقشه برداری مطابقت دارد [ 7 ، 25 ، 26 ، 27 ، 28 ، 29 ]. ویژگیهای مکانی در دادههای سنجش از دور در طبقهبندی بسیار مهم هستند و ذاتاً محلی و از نظر فضایی ثابت هستند. سی ان ان روشی را که قشر بینایی انسان کار می کند و به اشتراک گذاری وزن را با تغییر ناپذیری ترجمه مدل می کند، که امکان استخراج ویژگی های فضایی سطح بالا را از تکه های تصویر فراهم می کند.
انتخاب یک معماری FCN خوب در طبقه بندی با تصاویر با وضوح فضایی بالا برای کاربران کار دشواری است [ 28]]. این مطالعه نشان داد که FCN-8s انتخاب خوبی در طبقه بندی با تصاویر با وضوح فضایی بالا بود. اگرچه FCN-8s، Segnet و Unet همگی روشهای کانولوشن مبتنی بر پیکسل هستند و عملکرد پیشرفتهای را نشان میدهند، اما نتایج متفاوتی را در دقت نقشهبرداری خود به نمایش گذاشتند. مدل FCN-8s در بین این سه معماری بهترین عملکرد را داشت و Unet کمترین دقت را در بین این سه معماری نشان داد. بیشترین تفاوت بین این معماری ها در مرحله رمزگشا بود. روش نمونه برداری در مرحله رمزگشا تأثیر مهمی بر دقت طبقه بندی دارد. برخلاف FCN-8s و Segnet، مدل Unet همچنین تعداد زیادی کانال ویژگی را در مرحله نمونهبرداری با به هم پیوستن کانالها از لایههای رمزگشایی میسازد، که به شبکه اجازه میدهد اطلاعات زمینه را به لایههای با وضوح بالاتر منتشر کند. که ممکن است منجر به نمونه های آموزشی بیشتر شود. مدل FCN-8s سه ویژگی مقیاس را در مرحله رمزگشا ترکیب کرد (نشان داده شده درشکل 2 )، که ممکن است به ارتقای دقت با ادغام مقیاسهای مختلف اطلاعات بافت مکانی کمک کند.
تصاویر سنجش از دور با وضوح فضایی بالا با باندهای RGB+NIR در نگاشت پوشش زمین بهتر از باندهای RGB عمل کردند. از آنجایی که نوار NIR حاوی اطلاعات بیشتری در مورد اجسام زمینی به ویژه برای انواع پوشش گیاهی است، افزودن این اطلاعات به افزایش دقت کمک می کند. با این حال، افزودن باند NIR در FCN ها بهبود قابل توجهی را در دقت کلی نشان نداد. محتمل ترین دلیل این بود که تنها یک باند NIR نمی تواند اطلاعات کافی برای بهبود طبقه بندی ارائه دهد. این تحقیق با نتایج سایر محققان در مقایسه روشهای یادگیری ماشینی مرسوم و روشهای یادگیری عمیق مطابقت دارد [ 15 ، 16 ].
برای آموزش ورودی های RGB+NIR، مدل شبکه به مجموعه داده های آموزشی بسیار بزرگی نیاز دارد. بنابراین، ساختن یک شبکه از پیش آموزش دیده مانند شبکه ای که فقط ورودی RGB دارد، دشوار است. تعداد کلاس ها در نقشه برداری عامل مهم دیگری است که بر دقت تأثیر می گذارد. اکثر تحقیقات فقط بر روی اعداد طبقات کوچک در طبقه بندی متمرکز شده اند، مانند پنج طبقه پوشش زمین مشروح شده: ساخته شده، زمین های کشاورزی، جنگل، علفزار، و آب ها در طبقه بندی پوشش زمین [5] .]. با این حال، زمانی که تعداد کلاس ها بیشتر از 10 باشد، دقت کلی کاهش می یابد. ما 13 کلاس را در مقاله خود طبقه بندی کردیم و همین پدیده را در نتایج خود یافتیم: دقت برخی از کلاس ها کمتر از کلاس های دیگر بود. اگرچه FCN-8s بهتر از روشهای دیگر عمل کرد، اما در طبقهبندی کلاسهای خاص محدود بود. رایجترین دلایل این است که (1) نمونههای آموزشی کم بودند، و (2) کلاسها ویژگیهای فضایی/طیفی مشابهی در طیف RGB+NIR داشتند.
انواع کلاس های مختلف سطوح دشواری متفاوتی را در فرآیند طبقه بندی نشان دادند. کلاس های خطی شکل دقت کمتری را در مقایسه با سایر کلاس ها هنگام استفاده از روش های FCN نشان دادند. این احتمالاً به این دلیل است که اطلاعات لبه خاصی از جسم خطی در فرآیند پیچیدگی از بین می رود. بنابراین، روشی برای روش طبقه بندی اشیاء خطی باید در آینده در نظر گرفته شود.
از این مطالعه، ما دریافتیم که تصاویر GF2 یک نتیجه دلگرم کننده در تخمین پوشش زمین بر اساس روش FCN-8s ارائه کرد. این نتایج نشان داد که GF2 یک پایگاه داده جامع و بزرگ از تصاویر ماهواره ای با وضوح بسیار بالا با هزینه مقرون به صرفه ارائه می دهد که می تواند برای نقشه برداری در مقیاس بزرگ و پوشش زمین مورد بهره برداری قرار گیرد.
5. نتیجه گیری ها
نقشه برداری پوشش زمین یک متغیر مهم اکوسیستم زمینی است که برای اهداف بسیاری استفاده می شود. استفاده از تصاویر با وضوح فضایی بالا با اطلاعات چند طیفی برای نقشه برداری از پوشش زمین کار بسیار دشواری است.
در این مطالعه، ما FCN ها را برای طبقه بندی تصاویر سنجش از دور چندطیفی با وضوح فضایی بالا وفق دادیم و دقت FCN های مختلف را در طبقه بندی با و بدون باند NIR به عنوان ورودی مقایسه کردیم. ما از طریق این فرآیند به بینش های خاصی دست یافتیم.
اول، روشهای FCN نتایج خوبی در طبقهبندی پوشش زمین با تصاویر با وضوح فضایی بالا ارائه کردند. با این حال، معماری های مختلف FCN نتایج متفاوتی را در دقت نقشه برداری خود به نمایش گذاشتند. مدل FCN-8s بهترین عملکرد را در بین این سه معماری به دلیل الحاق ویژگیهای مختلف مقیاس فضایی در مرحله نمونهبرداری انجام داد.
ثانیا، تصاویر سنجش از راه دور با وضوح فضایی بالا با باندهای RGB+NIR در مقایسه با باندهای RGB فقط در نقشه برداری پوشش زمین به خوبی عمل کردند. با این حال، مزیت محدود بود.
ثالثاً، تصاویر GF2 یک نتیجه دلگرم کننده در تخمین پوشش زمین بر اساس روش FCN-8s ارائه کرد که می تواند برای نقشه برداری در مقیاس بزرگ و پوشش زمین مورد بهره برداری قرار گیرد.
منابع
- چن، جی. چن، جی. لیائو، ا. کائو، ایکس. چن، ال. چن، ایکس. او، سی. آویزان شدن.؛ پنگ، اس. لو، ام. و همکاران نقشه برداری جهانی پوشش زمین با وضوح 30 متر: یک رویکرد عملیاتی مبتنی بر POK ISPRS J. Photogramm. Remote Sens. 2015 ، 103 ، 7-27. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- Wulder، MA; هرموسیلا، تی. استینسون، جی. Gougeon، FA; سفید، JC; هیل، دی. Smiley، BP ماهواره ای مبتنی بر سری زمانی پوشش زمین و تغییر اطلاعات به نقشه منطقه جنگلی مطابق با الزامات گزارش ملی و بین المللی. برای. بین المللی جی. برای. Res. 2020 ، 93 ، 331-343. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- گریفیث، پی. وان در لیندن، اس. کومرل، تی. Hostert، P. یک الگوریتم ترکیبی Landsat مبتنی بر پیکسل برای نقشه برداری پوشش زمین با مساحت بزرگ. IEEE J. Sel. بالا. Appl. زمین Obs. Remote Sens. 2013 ، 6 ، 2088–2101. [ Google Scholar ] [ CrossRef ]
- Hauser, LT; نگوین وو، جی. نگوین، BA; داد، ای. نگوین، اچ ام. نگوین، TTQ؛ Le، TQ; Vu، LH؛ تانگ، ATH; فام، HV کشف پویایی مکانی-زمانی تغییر پوشش زمین و تکه تکه شدن جنگل های حرا در شبه جزیره Ca Mau، ویتنام با استفاده از تصاویر ماهواره ای SPOT چند زمانی (2004-2013). Appl. Geogr. 2017 ، 86 ، 197-207. [ Google Scholar ] [ CrossRef ]
- کرکیزی، ج. کارانتزالوس، ک. وکالوپولو، م. آنتونیو، جی. نقشه برداری تفصیلی پوشش زمین از داده های چندزمانی Landsat-8 پوشش ابری مختلف. Remote Sens. 2018 , 10 , 1214. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- Lobser، SE; کوهن، WB MODIS کلاهک منگوله دار: ویژگی های پوشش زمین که از طریق داده های MODIS تبدیل شده بیان می شود. بین المللی J. Remote Sens. 2007 ، 28 ، 5079-5101. [ Google Scholar ] [ CrossRef ]
- راتاجزاک، آر. Crispim-Junior، CF; فور، ای. فرورز، بی. Tougne, L. بازسازی خودکار پوشش زمین از تصاویر هوایی تاریخی: ارزیابی الگوریتم های استخراج و طبقه بندی ویژگی ها. IEEE Trans. فرآیند تصویر 2019 ، 28 ، 3357–3371. [ Google Scholar ] [ CrossRef ] [ PubMed ]
- پریدل، اس. لانگ، ام. Doktor, D. معرفی APiC برای نقشه برداری منطقه ای پوشش زمین در مقیاس ملی با استفاده از تصاویر Sentinel-2A. سنسور از راه دور محیط. 2020 , 240 , 111673. [ Google Scholar ] [ CrossRef ]
- گونگ، پی. لیو، اچ. ژانگ، ام. لی، سی. وانگ، جی. هوانگ، اچ. کلینتون، ن. جی، ال. لی، دبلیو. بای، ی. و همکاران طبقه بندی پایدار با نمونه محدود: انتقال مجموعه نمونه با وضوح 30 متری جمع آوری شده در سال 2015 به نقشه برداری پوشش زمینی با وضوح 10 متری در سال 2017. علمی. گاو نر 2019 ، 64 ، 370-373. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- جین، بی. بله، پی. ژانگ، ایکس. آهنگ، دبلیو. لی، اس. روش شی گرا همراه با شبکه های عصبی کانولوشنال عمیق برای طبقه بندی نوع کاربری زمین تصاویر سنجش از دور. J. شرکت هندی Remote Sens. 2019 , 47 , 951–965. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- خان، ن. چاودوری، یو. بانرجی، بی. Chaudhuri، S. Graph شبکه کانولوشن برای تشخیص صحنه سنجش از راه دور VHR چند برچسبی. محاسبات عصبی 2019 ، 357 ، 36-46. [ Google Scholar ] [ CrossRef ]
- تانگ، X.-Y. لو، کیو. Xia، G.-S. Zhang, L. طبقه بندی پوشش زمین در مقیاس بزرگ در تصاویر ماهواره ای GaoFen-2. در مجموعه مقالات IGARSS 2018-2018 IEEE بین المللی زمین شناسی و سمپوزیوم سنجش از دور، والنسیا، اسپانیا، 22 تا 27 ژوئیه 2018. [ Google Scholar ]
- چنگ، ی. جین، اس. وانگ، ام. زو، ی. Dong, Z. رویکرد موزائیک کردن تصویر برای یک سیستم دوربین دوگانه در ماهواره سنجش از دور نوری GaoFen2 بر اساس دوربین مجازی بزرگ. Sensors 2017 , 17 , 1441. [ Google Scholar ] [ CrossRef ] [ PubMed ][ نسخه سبز ]
- ژانگ، سی. سارجنت، آی. پان، X. گاردینر، آ. هار، جی. اتکینسون، ادغام تصمیم منطقهای مبتنی بر VPRS از CNN و طبقهبندی MRF برای تصاویر سنجش از راه دور با وضوح بسیار خوب. IEEE Trans. Geosci. Remote Sens. 2018 , 56 , 4507–4521. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- ژانگ، سی. پان، X. لی، اچ. گاردینر، آ. سارجنت، آی. هار، جی. اتکینسون، PM یک طبقهبندی ترکیبی MLP-CNN برای طبقهبندی تصاویر سنجش از راه دور با وضوح بسیار خوب. ISPRS J. Photogramm. Remote Sens. 2018 ، 140 ، 133-144. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- لیو، ی. فن، بی. وانگ، ال. بای، جی. شیانگ، اس. Pan, C. برچسبگذاری معنایی در تصاویر با وضوح بسیار بالا از طریق یک شبکه عصبی کانولوشنال خود آبشاری. ISPRS J. Photogramm. Remote Sens. 2018 , 145 , 78–95. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- Sherrah, J. شبکه های کاملاً پیچیده برای برچسب گذاری معنایی متراکم تصاویر هوایی با وضوح بالا. arXiv 2016 ، arXiv:160602585 Cs. [ Google Scholar ]
- حیدری، س.س. Mountrakis، G. متاآنالیز شبکه های عصبی عمیق در سنجش از دور: مطالعه مقایسه ای طبقه بندی تک زمانی برای پشتیبانی از ماشین های برداری. ISPRS J. Photogramm. Remote Sens. 2019 , 152 , 192–210. [ Google Scholar ] [ CrossRef ]
- ما، ال. لیو، ی. ژانگ، ایکس. بله، ی. یین، جی. جانسون، کارشناسی یادگیری عمیق در کاربردهای سنجش از دور: یک متاآنالیز و بررسی. ISPRS J. Photogramm. Remote Sens. 2019 , 152 , 166–177. [ Google Scholar ] [ CrossRef ]
- ژانگ، سی. سارجنت، آی. پان، X. لی، اچ. گاردینر، آ. هار، جی. اتکینسون، PM یک شبکه عصبی کانولوشن مبتنی بر شی (OCNN) برای طبقهبندی کاربری زمین شهری. سنسور از راه دور محیط. 2018 ، 216 ، 57-70. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- محمدی منش، ف. صالحی، ب. مهدیان پری، م. گیل، ای. مولینیر، ام. یک شبکه عصبی کاملاً پیچیده جدید برای تقسیم معنایی تصاویر SAR قطبی در اکوسیستم پوشش زمین پیچیده. ISPRS J. Photogramm. Remote Sens. 2019 , 151 , 223–236. [ Google Scholar ] [ CrossRef ]
- بدرینارایانان، وی. کندال، ا. Cipolla، R. SegNet: معماری رمزگذار-رمزگشای پیچیده پیچیده برای تقسیم بندی تصویر. arXiv 2015 ، arXiv:151100561 Cs. [ Google Scholar ] [ CrossRef ] [ PubMed ]
- رونبرگر، او. فیشر، پی. Brox، T. U-Net: شبکه های کانولوشن برای تقسیم بندی تصویر زیست پزشکی. arXiv 2015 ، arXiv:150504597 Cs. [ Google Scholar ]
- لانگ، جی. شلهامر، ای. دارل، تی. شبکه های کاملاً پیچیده برای تقسیم بندی معنایی. در مجموعه مقالات کنفرانس IEEE در مورد بینایی کامپیوتری و تشخیص الگو (CVPR)، بوستون، MA، ایالات متحده آمریکا، 7 تا 12 ژوئن 2015. صص 3431–3440. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- کمکر، آر. سالواجو، سی. کانان، سی. الگوریتمهای تقسیمبندی معنایی تصاویر سنجش از دور چندطیفی با استفاده از یادگیری عمیق. ISPRS J. Photogramm. Remote Sens. 2018 ، 145 ، 60-77. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- استیواکتاکیس، آر. تساگاتاکیس، جی. Tsakalides، P. یادگیری عمیق برای طبقهبندی صحنه پوشش زمین با استفاده از افزایش دادهها. IEEE Geosci. سنسور از راه دور Lett. 2019 ، 16 ، 1031-1035. [ Google Scholar ] [ CrossRef ]
- زو، XX; تویا، دی. مو، ال. Xia، G.-S. ژانگ، ال. خو، اف. Fraundorfer، F. یادگیری عمیق در سنجش از دور: بررسی جامع و فهرست منابع. IEEE Geosci. سنسور از راه دور Mag. 2017 ، 5 ، 8-36. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- ژانگ، ال. ژانگ، ال. Du, B. یادگیری عمیق برای داده های سنجش از دور: یک آموزش فنی در مورد وضعیت هنر. IEEE Geosci. سنسور از راه دور Mag. 2016 ، 4 ، 22-40. [ Google Scholar ] [ CrossRef ]
- کروپی، ای. کسا، م. ناوارو-سانچز، وی دی. سعید، س. پلوکین، سی. الحداد، بی. مورنو، ال. سوریا-فریش، ا. Ruffini، G. شبکههای عصبی کانولوشنال عمیق برای طبقهبندی پوشش زمین با تصاویر Sentinel-2. J. Appl. Remote Sens. 2019 , 13 , 024525. [ Google Scholar ] [ CrossRef ]
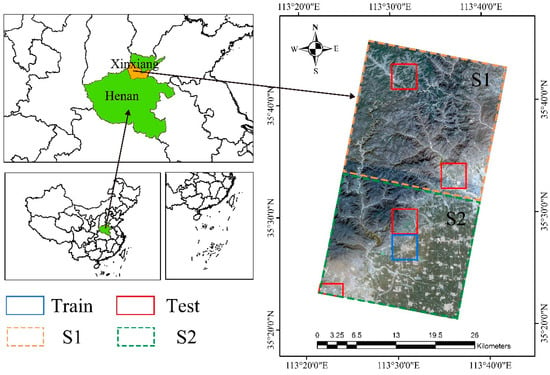
شکل 1. محل منطقه مورد مطالعه (برگ) و دو صحنه (S1 و S2) از Gaofen-2 (GF2). مناطق نمونه قطار و آزمایش با یک رنگ متفاوت (آبی برای تمرین و قرمز برای آزمایش) برچسب گذاری شده اند.
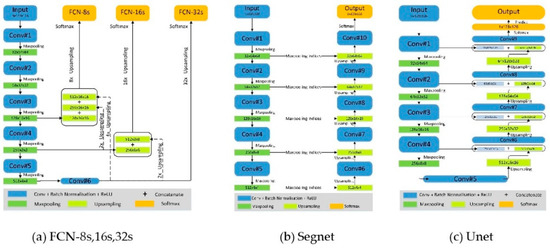
شکل 2. معماری شبکه های کاملاً کانولوشنال (FCNs) ( a ) FCN-8،16،32s ( b ) Segnet ( c ) Unet. ورودی به معنای اندازه تصویر ورودی در FCN ها است، که در آن N باند تصاویر ورودی است که برابر با 3 یا 4 است، و اندازه وصله تصویر 128 × 128 است. ReLU). مستطیل هایی که با b × w × h (b، w، و h به ترتیب شماره کانال ویژگی، عرض و ارتفاع تصویر را نشان میدهند) اندازه خروجی پس از حداکثر ادغام یا روش نمونهبرداری بالا هستند. نماد “+” در ( a )، ( c ) ویژگی های الحاق مختلف را در بعد کانال ویژگی نشان می دهد. «شاخصهای ماکسپولینگ» در ( ب) مکان های حداکثر مقدار ویژگی را در هر پنجره ادغام نشان می دهد. آنها در مرحله max pooling حفظ می شوند و سپس در مرحله upsampling استفاده می شوند.
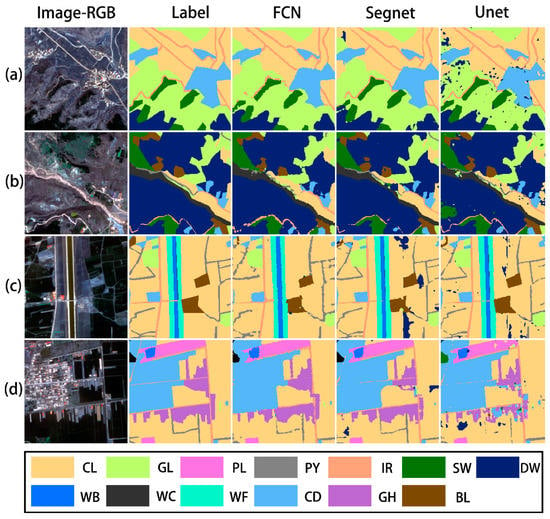
شکل 3. چهار زیر مجموعه تصویر معمولی ( a – d ) در منطقه مورد مطالعه با نتایج طبقه بندی متفاوت تنها با استفاده از سه باند (R+G+B). ستونها از چپ به راست به ترتیب تصاویر اصلی (باندهای R+G+B)، نقشه برچسب، طبقهبندی FCN-8s، طبقهبندی Segnet و طبقهبندی Unet را نشان میدهند. CL نشان دهنده زمین غلات، GL نشان دهنده علفزار، PL نشان دهنده زمین صنوبر، PY نشان دهنده مسیر در زمین کشاورزی، IR نشان دهنده جاده غیرقابل نفوذ، SW نشان دهنده جنگل های پراکنده، DW نشان دهنده جنگل های متراکم، WB نشان دهنده آب، WC نشان دهنده یک کانال بدون آب، WF نشان دهنده آب است. امکانات حفاظتی، CD نشان دهنده زمین ساخت و ساز، GH نشان دهنده گلخانه، و BL نشان دهنده زمین برهنه است.
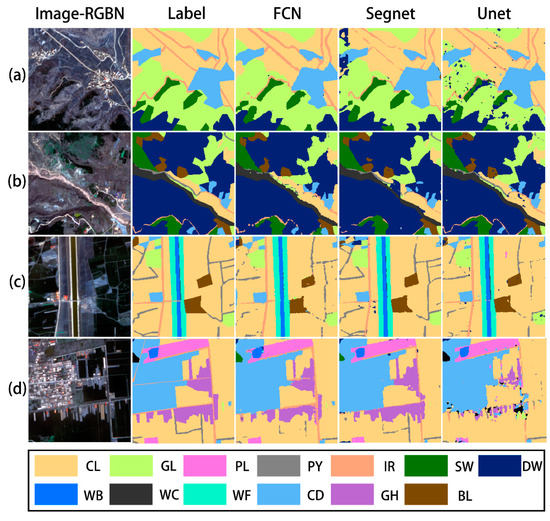
شکل 4. چهار زیر مجموعه تصویر معمولی ( a – d ) در منطقه مورد مطالعه با نتایج طبقه بندی متفاوت با استفاده از چهار باند (R+G+B+ نزدیک مادون قرمز (NIR)). ستونها از چپ به راست به ترتیب تصاویر اصلی (باندهای R+G+B)، نقشه برچسب، طبقهبندی FCN-8s، طبقهبندی Segnet و طبقهبندی Unet را نشان میدهند. CL نشان دهنده زمین غلات، GL نشان دهنده علفزار، PL نشان دهنده زمین صنوبر، PY نشان دهنده مسیر در زمین کشاورزی، IR نشان دهنده جاده غیرقابل نفوذ، SW نشان دهنده جنگل های پراکنده، DW نشان دهنده جنگل های متراکم، WB نشان دهنده آب، WC نشان دهنده یک کانال بدون آب، WF نشان دهنده حفاظت از آب است. امکانات، CD نشان دهنده زمین ساخت و ساز، GH نشان دهنده گلخانه، و BL نشان دهنده زمین برهنه است.
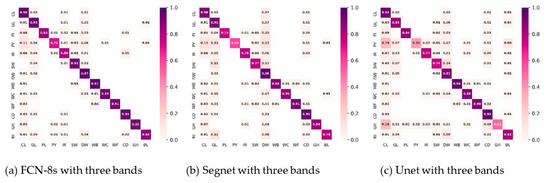
شکل 5. تجسم نقشه حرارتی ماتریس سردرگمی نرمال شده (نرمال شده در هر ردیف) برای طبقه بندی پوشش زمین با استفاده از ورودی سه باند با سه مدل. ( الف ) FCN-8 با سه باند، ( ب ) Segnet با سه باند، و ( ج)) Unet با سه باند. مقادیر برچسبگذاری شده در هر شبکه، دقت نرمال شده هر کلاس را نشان میدهد که میزان نسبت اشتباه را با کلاسهای دیگر نشان میدهد. دقت های نرمال شده بیشتر یا مساوی 0.01 برچسب گذاری شده اند. CL نشان دهنده زمین غلات، GL نشان دهنده علفزار، PL نشان دهنده زمین صنوبر، PY نشان دهنده مسیر در زمین کشاورزی، IR نشان دهنده جاده غیرقابل نفوذ، SW نشان دهنده جنگل های پراکنده، DW نشان دهنده جنگل های متراکم، WB نشان دهنده آب، WC نشان دهنده کانال بی آب، WF نشان دهنده آب است. امکانات حفاظتی، CD نشان دهنده زمین ساخت و ساز، GH نشان دهنده گلخانه، و BL نشان دهنده زمین برهنه است.
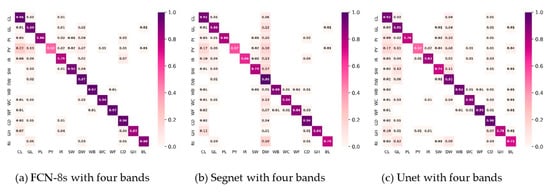
شکل 6. تجسم نقشه حرارتی ماتریس سردرگمی نرمال شده برای طبقه بندی پوشش زمین با استفاده از ورودی چهار باند با سه مدل. ( الف ) FCN-8 با چهار باند، ( ب ) Segnet با چهار باند، و ( ج)) Unet با چهار باند. مقادیر برچسبگذاری شده در هر شبکه، دقت نرمال شده هر کلاس را نشان میدهد که میزان نسبت اشتباه را با کلاسهای دیگر نشان میدهد. دقت نرمال شده بیشتر از 0.01 برچسب گذاری شده است. CL نشان دهنده زمین غلات، GL نشان دهنده علفزار، PL نشان دهنده زمین صنوبر، PY نشان دهنده مسیر در زمین کشاورزی، IR نشان دهنده جاده غیرقابل نفوذ، SW نشان دهنده جنگل های پراکنده، DW نشان دهنده جنگل های متراکم، WB نشان دهنده آب، WC نشان دهنده کانال بی آب، WF نشان دهنده آب است. امکانات حفاظتی، CD نشان دهنده زمین ساخت و ساز، GH نشان دهنده گلخانه، و BL نشان دهنده زمین برهنه است.


بدون دیدگاه