1. معرفی
یکی از مهم ترین عوامل برای سیستم های ماهواره ای ناوبری جهانی (GNSS) از نظر دقت موقعیت یابی مطلوب، پوشش ماهواره ای فراوان است. با این وجود، کافی بودن GNSS را می توان در مناطقی که مورفولوژی و هندسه زمین اطراف مسدود یا با سیگنال بین ماهواره و گیرنده در تعامل است، کاهش داد. به طور خاص، محیط های شهری و مناطق پوشیده از گیاه به دلیل تداخل سیگنال، اثر چند مسیری یا انسداد خط دید، برای موقعیت یابی دقیق GNSS چالش هایی ایجاد می کنند، عواملی که لزوماً در طول زمان در طول اندازه گیری کاهش نمی یابند [ 1 ]]. به طور معمول، حتی انسداد سیگنال ماهواره ای با مدت زمان کوتاه می تواند عملکرد سیستم های ناوبری را به میزان قابل توجهی کاهش دهد. از سوی دیگر، جایگزینهای نقشه برداری غیر GNSS، از جمله ایستگاههای کل و اسکنرهای لیزری، شامل اقدامات زمانبر در میدان و/یا تجهیزات پرهزینه است. مواردی وجود دارد که نقشه برداری معمولی را نمی توان در حال حاضر جایگزین GNSS کرد، در حالی که در موارد دیگر نقشه برداری کلاسیک غیر عملی باقی می ماند. در این بین، مجموعه ای از شرایط حل نشده وجود دارد که نیاز به نقشه برداری سریع مقرون به صرفه در محیط های محروم از GPS حیاتی است.
دو نوع راه حل اصلی پیشنهادی برای رفع تخریب سیگنال GNSS وجود دارد، یعنی راه حل هایی که به خودی خود با سیگنال GNSS مداخله می کنند و راه حل هایی که از کمک های بصری یا خارجی دیگر برای ایجاد یک تخمین مختصات دقیق استفاده می کنند. حتی اگر عملکرد موقعیتیابی چند صورت فلکی GNSS در محیط شهری با توجه به تحلیل سیستم مستقل [ 2 ] بهبود یافته است، تکنیکهای جایگزینی از جمله تقریب زاویه [ 3 ]، تطبیق سایه [ 4 ]، تخمینهای چندمسیری با استفاده از مدلهای سهبعدی پیشنهاد شدهاند. 5 ] و مدل های آماری [ 6 ، 7 ].
چندین راه حل دیگر برای این مشکل ناشی از روش هایی است که بر روی بهبود عملکرد موقعیت یابی GNSS با معرفی اطلاعات از روش های دیگر کار می کنند. در [ 2 ]، نویسندگان از یک حسگر محاسبه مرده استفاده می کنند که یک
حسگر فضایی متشکل از ژیروسکوپ های 3 محوری، شتاب سنج های 3 محوری، مغناطیس سنج های 3 محوری، دما و ارتفاع سنج فشارسنج برای برون یابی یک مسیر در زمانی که سیگنال GNSS وجود ندارد. به طور مشابه، Kim و Sukkarie [ 8 ] یک سیستم محلی سازی و نقشه برداری همزمان (SLAM) را به یک فیلتر فیوژن GNSS/Inertial Navigation System (INS) ادغام می کنند. INS موقعیت یک جسم متحرک را با محاسبه مرده بدون مراجع خارجی محاسبه می کند. در [ 9 ، 10]، نویسندگان از پردازش پست و بیدرنگ تصاویر هوایی با وضوح بالا با استفاده از تکنیکهای آماری برای ارجاع جغرافیایی دادههای نقشهبرداری تلفن همراه استخراجشده از مناطق محروم GNSS استفاده میکنند، در حالی که هنگ و همکاران. [ 11 ]، پلتفرمی را برای وسیله نقلیه خودمختار پیشنهاد کرد که نقشه برداری سه بعدی را بدون نیاز به GNSS با استفاده از سیستم دوربین 360 درجه، هندسه چند نمای و شبکه های عصبی کاملاً کانولوشن انجام می دهد. در [ 12 ]، نویسندگان یک پلت فرم هوایی (UAV) و زمینی (پردازش محاسباتی) را برای ارجاع جغرافیایی داده های هوایی استخراج شده توسط SLAM بصری آنلاین بر اساس الگوریتم ORB-SLAM2 با استفاده از تکنیک های فتوگرامتری ترکیب می کنند. زهران و همکاران [ 5]، یادگیری ماشین را برای
حسگرهای پهپاد برای تشخیص الگوهای تکرارشونده پویا در سیگنال های ورودی به منظور بهبود وضعیت های ناوبری که تخمین زده می شوند، اعمال کنید. نویسندگان [ 13 ] از کیلومتر شماری بصری و فیلترهای کالمن توسعه یافته به منظور بهبود اندازه گیری های واحد اندازه گیری اینرسی (IMU) Xu و همکاران استفاده می کنند. [ 14 ]، یک روش ORB-SLAM را برای سیستمهای مکانیابی بلادرنگ در محیطهای داخلی فاقد GPS به منظور شناسایی نقاط مشخصهای که به دقتی در محدوده 0.39-0.18 متر دست مییابند با کمک یک سنسور عمق برای به دست آوردن اطلاعات مقیاس، توسعه دادند. صحنه اورزوا و همکاران [ 4] یک روش SLAM را برای محلیسازی در یک محیط فاقد GNSS انجام داد و مشکل مقیاس را که در روشهای SLAM تک چشمی ذاتی است، با فشارسنج و ارتفاعسنج حل کرد در حالی که یک تشخیص نقطه عطف در [ 15 ] استفاده میشود. با این حال، آنها به دلیل در دسترس بودن نشانه های بصری که الگوریتم می تواند با آنها در ارتفاعات بالا مقایسه کند، محدود شده است. تانگ و همکاران [ 3 ] ادعا می کند که عملکرد SLAM در محیط های بدون ویژگی ضعیف است و روشی را بدون SLAM انتخاب کنید در حالی که در [ 16 ]]، یک سیستم SLAM مبتنی بر بصری برای ناوبری با استفاده از یک پهپاد، یک دوربین تک چشمی، یک حسگر جهت (AHRS) و یک سنسور موقعیت (GPS) پیشنهاد شده است. این سیستم پردازش SLAM را برای ناوبری انجام می دهد اما اندازه گیری های GPS را در طول دوره اولیه سازی برای تخمین مقیاس متریک صحنه ترکیب می کند.
در این مطالعه، ما روشی را پیشنهاد میکنیم که مکانیابی نقاط دلخواه را در یک منطقه مورد علاقه تنها با استفاده از یک دوربین منفرد نصب شده بر روی یک هواپیمای تجاری یا دیگر هواپیمای بدون سرنشین (پهپاد یا پهپاد) ممکن میسازد. به طور خاص، با بهره گیری از بازخورد بصری یک حسگر نوری، روش مطالعه قادر به ارائه تخمین های کارآمد از مختصات نقطه است که می تواند در برنامه های نقشه برداری سریع استفاده شود. هدف اصلی روش پیشنهادی پیشنهاد، ارزیابی و در آینده ایجاد یک جایگزین نقشه برداری برای مناطق مسدود شده یا تخریب شده سیگنال GNSS است که دقت مختصات نقطه ای 50 سانتی متر یا بهتر را ارائه می دهد. این دقت در بسیاری از مطالعات توپوگرافی قابل قبول است و اغلب در مقایسه با اندازه گیری های GNSS با پوشش کم ماهواره ای بسیار بهتر است. به عنوان مثال، پس از یک حادثه طبیعی،17 ]. موارد دیگر عبارتند از، نقشه برداری از منابع طبیعی [ 18 ، 19 ] و برنامه های کاربردی جستجو و نجات [ 20 ، 21 ]. مطالعات مربوط به هواپیماهای بدون سرنشین فقط فیدهای ویدیویی یا تصاویر ارائه می دهند [ 22] گاهی اوقات با یک تخمین تقریبی از موقعیت. سیستمهای پهپاد ساده که از گیرندههای GNSS معمولی استفاده میکنند، در برد 5 متری دقت دارند. هنگامی که به عنوان مثال، در برنامه های جستجو و نجات استفاده می شود، این کافی نیست، زیرا به جای موقعیت یابی گسترده کشتی نظارت، به تعیین موقعیت جغرافیایی دقیق افراد نیازمند نیاز است. INS/IMU پهپادهای تجاری ساده مربوطه، دوباره از خطاهای ناوبری انباشته شده با زمان پرواز رنج می برند. تا جایی که ما می دانیم و در زمینه کار نقشه برداری کاملاً فعال هستیم، هیچ تکنیک ثابت دیگری وجود ندارد که این نوع نقشه برداری را از نظر دقت، سهولت استفاده، هزینه و سرعت پوشش دهد. نقشه برداری کلاسیک ایستگاه کل پرهزینه و کند است، GNSS در مناطق مسدود دقت قابل قبولی ارائه نمی دهد.23 ، 24 ] در حالی که اسکنرهای لیزری بسیار گران هستند.
انگیزه این کار نیاز به یک تکنیک نقشه برداری سریع خودمختار در زمان واقعی از یک منطقه ناشناخته است که در آن موقعیت یابی GNSS دقیق نیست، یا حتی به دست آوردن آن غیرممکن است. یک تکنیک جدید بر اساس SLAM و پردازش تصویر ارائه شده است. محیطهای شهری از محدودیتهایی مانند کمبود ویژگیها رنج نمیبرند، زیرا بیشتر موانع سیگنالهای GNSS اشیایی هستند که نمایشهای بصری غنی از ویژگیها را تولید میکنند که استفاده از روش SLAM را مؤثر میسازد. هیچ روش مشابهی وجود ندارد که SLAM بصری را با انتقال مختصات GNSS از یک مکان به مکان دیگر بر اساس تنها حسگرهای اصلی دوربین ترکیب کند. انگیزه اساسی این روش، بهینه سازی برای سادگی، ترجیح راه حل های کم هزینه تر از نظر تجهیزات، به منظور عملی ماندن در تنظیمات مختلف است. روش پیشنهادی به گیرنده GNSS نیز بستگی ندارد، زیرا فرض بر این است که موقعیت GNSS یک مکان قابل شناسایی بصری در قالب یک نشانگر قرار داده شده دستی، در دسترس است. در نتیجه، از حل مشکل با بسته به اصلاح مراحل پس از پردازش یا استفاده از انواع حسگرهای اضافی (مانند فاصله یاب یا دوربین استریو) اجتناب می شود. هزینههای استفاده از چنین حسگرهایی میتواند منجر به کاهش زمان پرواز یا پیچیدگی پیادهسازی پهپاد شود. در عوض، مورد استفاده این مطالعه امکان انتخاب راهحلی را فراهم میکند که فقط شامل یک پهپاد، یک دوربین و یک نشانگر میشود، با امکان پردازش درونبرد یا آفلاین که بهطور خاص برای نیازهای برنامه خاص طراحی شده است. نکته قابل توجه این مطالعه، توانایی دستیابی به مکان یابی دقیق سه بعدی نشانگرهای بصری و نقشه برداری سریع در حد 50 سانتی متر تنها با استفاده از یک پهپاد خارج از قفسه و یک نشانگر بصری مرجع است. این تنظیم دقیق سرعت، کارایی، دقت و هزینه کم را فراهم می کند که ممکن است انقلابی در نقشه برداری مدرن باشد.
در بخش بعدی معماری اصلی، روش پیشنهادی و پیاده سازی ارائه شده است. در مرحله بعد، دو تغییر در راه حل روش اندازه گیری، همراه با چندین آزمایش در بخش 3 مقایسه می شوند که پتانسیل بزرگ روش را نشان می دهد.
2. مواد و روشها
یک نقطه عطف مهم در رسیدن به هدف ما، شناسایی ژست نشانگر در فضای سه بعدی است. این نشانگرها شناسایی مکان های شناخته شده یا مکان های مورد علاقه که نیاز به نقشه برداری دارند را تسهیل می کنند. تخمین ژست (شامل مکان و چرخش) یک نشانگر را می توان از تصاویر گرفته شده توسط یک دوربین متصل به پهپاد استخراج کرد و موقعیت دوربین را در زمان ثبت تصویر برای چندین عکس به همراه اطلاعات پوز برای نشانگر شناسایی کرد. . با به دست آوردن تخمین های کافی برای هر دو حالت، می توان اطلاعات مورد نیاز را به منظور قرار دادن دقیق نشانگر در صحنه تحت یک سیستم مختصات ثابت یا سفارشی ترکیب کرد. دسته ای از روش هایی که چنین محاسبه ای را انجام می دهند، روش های SLAM هستند که قادر به ترسیم یک محیط ناشناخته هستند.25 ]. از این رو، یک روش SLAM تک چشمی انتخاب می شود که از طریق آن می توان موقعیت پهپاد را در سراسر مسیر شناسایی کرد. به طور خاص، روش ارائه شده بر اساس روش
OrbSlam2 [ 25 ] است، به دلیل عملکرد آن در مقایسه با سایر روش های اسلم تک چشمی [ 26 ، 27 ]] که به یک پهپاد مجهز به دوربین اجازه می دهد تا از محیط اطراف خود نقشه برداری کند و خود را در یک محیط ناشناخته قرار دهد. سیستم ارائه شده قادر است به صورت آنلاین اجرا شود، در حالی که پهپاد بلافاصله پس از پرواز در حال پرواز یا خارج از هواپیما است در حالی که خروجی اولیه آن شامل تخمین ابر نقطه ای از محیط ناشناخته و استخراج اطلاعات وضعیت دوربین در طول پرواز پهپاد است. برای شناسایی مکان های دلخواه در صحنه، از نشانگرهای بصری با کمک کتابخانه ArUco [ 6 ، 28 ] استفاده می شود.]. نشانگرهای ArUco نشانگرهای مربع مصنوعی با حاشیه سیاه و یک ماتریس باینری داخلی هستند که شناسه نشانگر را تعیین می کند، به این معنی که نشانگرهای مختلف دارای هویت های متفاوتی هستند. این نشانگرها یک سیستم مختصات سفارشی را تعریف می کنند که مختصات عناصر دیگر را در صحنه تعیین می کند، خواه آنها نشانگر باشند یا نقاطی از ابر نقطه. از نظر حسگر، از حسگر اپتیکال سمت چپ دوربین RealSense D435 ( https://www.intelrealsense.com/depth-camera-d435/ ) استفاده شد که تحت پارامترهای تنظیم شده کارخانه کالیبره شده بود.
روش ارائه شده از هر دو مسیر دوربین، به منظور تخمین صحیح نشانگرها/هدف ها در یک صحنه، و همچنین ابر نقطه، برای ارائه نشانه های بصری در مورد شکل ناحیه اطراف و امکان اندازه گیری فراتر از نشانگرهای ارائه شده استفاده می کند. .
2.1. معماری سیستم
روش کلی در شماتیک زیر مشخص شده است ( شکل 1 ). برای سادهتر کردن این روش، ممکن است نشانگر مبدا دقیقاً روی سکوی هواپیمای بدون سرنشین قرار داده شود.
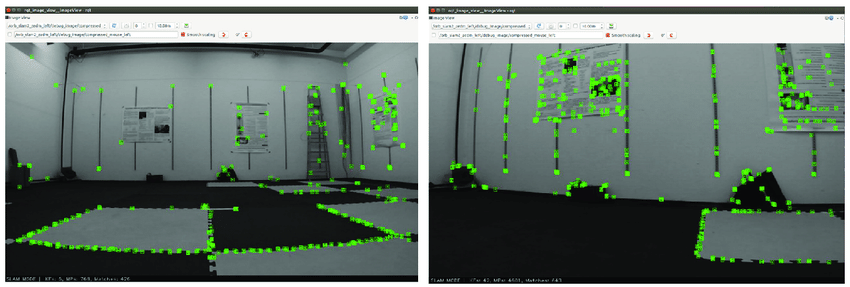
این روش شامل سه مرحله است. ابتدا، اسکریپتهای پایتون دادهها را از داخل فایل کیسهای سیستم عامل ربات (ROS، https://www.ros.org/ ) استخراج میکنند که توسط یک دوربین در طول فرآیند ضبط ویدیو ضبط میشود. خود دوربین برای به دست آوردن اطلاعات کالیبراسیون از تنظیمات کارخانه استفاده می شود در حالی که جریان داده های تصویر به فریم ها جدا شده و در یک پوشه ذخیره می شود. مرحله زیر پردازش SLAM پوشه تصویر است ( شکل 2 a)، که محتوای تصویر را با یک مسیر دوربین و یک ابر نقطه مرتبط می کند.
الگوریتم SLAM نقشهبرداری از محیط را فراهم میکند و امکان استفاده مجدد از قسمتهای بازدید شده قبلی از یک منطقه را از طریق حلقه-بسته شدن فراهم میکند، و پس از شناسایی چنین حلقهای، رانش در تخمینهای حالت دوربین را کاهش میدهد. بسته شدن حلقه یا بازدید مجدد از قسمتهای قبلی مسیر هنگام استفاده از پهپاد برای نقشهبرداری یک منطقه مجاز است، زیرا حرکت آن محدود به دنبال کردن یک مسیر از پیش تعیین شده به سمت مناطق مورد نظر نیست.
در نهایت، نشانگرهای بصری که به مکانیابی و تشخیص مناطق خاص در صحنه کمک میکنند، در تصاویر شناسایی میشوند و همراه با فایلهای ابر نقطه و مسیر دوربین، به یک الگوریتم تجسم داده میشوند. این الگوریتم یک صحنه بصری تولید می کند که شامل ابر نقطه، مسیر دوربین و همچنین تخمین مکان های نشانگر بصری در فضای سه بعدی است ( شکل 2 ب).
2.2. تعریف سیستم مختصات
سیستم مختصات اولیه روش ارائه شده به طور دلخواه توسط ORB-SLAM2 تعریف شده است. این سیستم مختصات توسط اولین فریم دوربین در فیلم گرفته شده تشکیل می شود، که در آن محورهای x و y با جهت های سمت راست و بالا در کادر دوربین مطابقت دارند در حالی که محور z از دوربین به سمت صحنه می رود. الگوریتم ORB-SLAM2 این سیستم مختصات را برای تراز کردن با اولین فریم ضبط شده دوربین، با جهت مثبت x و y و z تنظیم می کند.محور همانطور که در بالا توضیح داده شد. در این سیستم مختصات اولیه، یک ماتریس هویت به عنوان ماتریس چرخش، و یک بردار صفر به عنوان بردار ترجمه تعریف میشوند تا سیستم مختصات اولیه تحت تأثیر تبدیلهای زیر قرار نگیرد.
داده های کالیبراسیون از دوربین به همراه ژست دوربین به دست آمده از فایل مسیر تولید شده ORB-SLAM2 با الگوریتم های تشخیص نشانگر OpenCV ترکیب شده و استفاده می شود. این الگوریتم از داده های کالیبراسیون دوربین و ژست دوربین به همراه مختصات سه بعدی مربعی که با نشانگر مطابقت دارد استفاده می کند و بردارهای چرخش و ترجمه را تولید می کند که نقاط را از سیستم مختصات مدل به سیستم مختصات دوربین تبدیل می کند. حالت دوربین یک فریم در داخل فایل مسیر خروجی ORB-SLAM2 در رابطه با فریم اصلی بیان می شود.
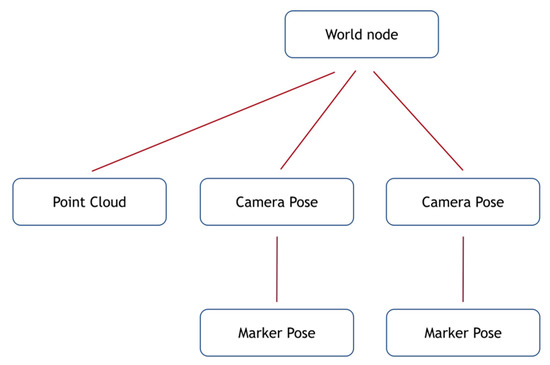
پیاده سازی ارائه شده شامل ساخت یک نمودار صحنه، یک ساختار درختی از گره های شی است ( شکل 3 ). گره جهان اولیه ریشه ساختار درختی است که با یک ماتریس چرخش هویت و بردار ترجمه صفر به همه گره های دیگر متصل می شود تا ثابت بماند.
با توجه به انتقال و چرخش (در زوایای اویلر) یک گره، موقعیت جهانی و چرخش جهان آن محاسبه می شود. به هر گره ای که مربوط به یک نشانگر است، بردارهای t، r و s به ترتیب برای نشان دادن ترجمه، چرخش و مقیاس آن اختصاص داده می شود. بردارها حالت های محلی هستند، در سیستم مختصات قاب دوربین که نشانگر موجود در گره را شناسایی می کند:
جایی که تی→، r→، س→بردارهای ترجمه، چرخش و مقیاس ذخیره شده در یک گره.
برای تعیین موقعیت جهانی یک گره، ماتریس های S، T و R (2، 3) را در مختصات همگن تعریف می کنیم:
که در آن S، T، و R، مقیاس، ترجمه و ماتریس چرخش را نشان می دهند. ضرب این ماتریس ها باعث ایجاد ماتریس تبدیل برای گره خاص می شود. از آنجایی که هر گره تبدیل محلی خود را ذخیره می کند، استفاده از ماتریس های تبدیل گره والد در ترکیب با ماتریس تبدیل محلی می تواند منجر به استخراج مختصات جهانی برای گره شود.
حالت جهانی هر گره ای که دارای والد است به صورت بازگشتی با ضرب ماتریس بین ماتریس G والد و ماتریس های T، R و S تعیین می شود (4). اگر یک گره والد نداشته باشد، حاصل ضرب ماتریس T، R و S روی ماتریس هویت تنظیم می شود. پس از تعیین مکان جهانی دو گره (گره نشانگر هدف (6) و گره مبدا (7)) می توان بردار ترجمه بین یک گره هدف و یک گره مبدا تشکیل داد (5).
با محاسبه بازگشتی ماتریسهای تبدیل محلی، و ضرب آنها در یکدیگر تا رسیدن به گره جهانی، میتوانیم تبدیل G را تشکیل دهیم که تبدیل کلی از مبدأ به حالت و مقیاس گره را میدهد:
گره جهانی که در مبدا قرار می گیرد با سیستم مختصات اولین فریم کلیدی تولید شده توسط سیستم ORB-SLAM2 همزمان است. هر گره دوربین به این گره جهانی متصل است. بنابراین، ژستهای ابر نقطه و دوربین در یک سیستم مختصات قرار میگیرند، زیرا مقادیر آنها در ابتدا با اشاره به آن سیستم مختصات در ORB-SLAM2 تعریف میشود. نشانگرهای ArUco به گره دوربینی که آنها را در ابتدا شناسایی کرده است وصل می شوند و با ترکیب نتایج SolPnP (که پوز نشانگر ArUco نسبی را در سیستم مختصات دوربین قرار می دهد)، با وضعیت ژست دوربین، می توانیم موقعیت جهان را محاسبه کنیم و چرخش هر نشانگر در سیستم مختصات جهان
برای هر نشانگری که در طول فیلمبرداری تشخیص داده می شود، یک ژست تخمین زده می شود. این موردی است که تشخیص های متعدد منجر به همان مقدار موقعیت نشانگر می شود. برای به دست آوردن یک تخمین پوز نهایی برای یک نشانگر، مکانهای مجموعه نشانگرهای فیلتر شده را میانگینگیری میکنیم و کواترنیونها را درونیابی میکنیم تا یک تخمین پوز واحد برای هر نشانگر در صحنه به دست آوریم. در عین حال، ما فقط درصدی از نشانگرها را بر اساس محل قرارگیری آنها در صورت مرتب شدن بر اساس میزان فاصله از مکان متوسط نگه می داریم. ما رخدادهای ثانویه نشانگرها را در ویدیو نادیده میگیریم، زیرا اولین تخمینهای پوس معمولاً قویترین هستند. آستانه وقوع مجدد یک نشانگر روی دو ثانیه بیدرنگ غیبت از فریم تنظیم شده است (مرتبط با 180 فریم تشخیص صفر نشانگر خاص در 90 فریم در ثانیه).
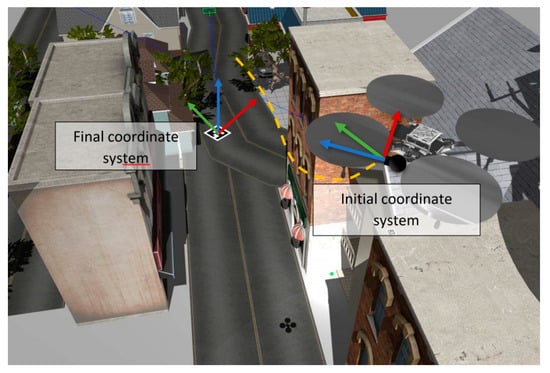
پیاده سازی ارائه شده قادر به تعریف سیستم مختصات نهایی صحنه است که توسط یک نشانگر منفرد (نشانگر مبدا) نشان داده شده است. شایان ذکر است که این کاملاً با سیستم مختصات اولیه ORB-SLAM2 متفاوت است و نباید اشتباه گرفته شود ( شکل 4)). روش تعریف سیستم مختصات، ماتریس چرخش و بردار ترجمه را از موقعیت نشانگر مبدا تخمین می زند و یک سیستم مختصات را در مرکز نشانگر قرار می دهد که مبدأ آن را نشان می دهد. این حالت از ژست جهانی نشانگر که در رابطه با سیستم مختصات اصلی قاب اولیه ORB-SLAM2 تخمین زده شده است، بیان می شود. پس از تعریف سیستم مختصات، پیاده سازی برای محاسبه تخمین پوز نهایی همه نشانگرها با استفاده از سیستم مختصات نهایی تعریف شده توسط نشانگر مبدا انجام می شود.
2.3. رویکردهای اولیه برای برآورد مقیاس
در طول تخمین پوزی یک نشانگر، مقیاس آن از یک تصویر در این مجموعه تک چشمی قابل تعیین نیست. نشانگر ArUco چه اندازه بزرگ باشد و چه در فاصله زیادی از دوربین و یا برعکس، زمانی که کوچک و نزدیک به دوربین باشد، همان نمایش را روی تصویر خواهد داشت. همه مکانهای بین نشانگر جفتهای مقیاس مکان ممکن را در یک خط تشکیل میدهند. بنابراین، کل مجموعه تصاویری که حاوی یک نشانگر ArUco خاص هستند در نظر گرفته می شوند. برای تخمین مقیاس محلی، فاصله بین تمام مکانهای نشانگر ArUco در مجموعه تصویر باید به حداقل برسد. چندین روش مقایسه بدون هیچ تفاوت معناداری انجام شد، بنابراین میانگین تمام فواصل زوجی بین نشانگرها به عنوان متریک مقایسه استفاده شد. با ارزیابی مقیاس های مختلف برای نشانگرهای ArUco، مشاهده شد که این کمینه سازی زمانی که نشانگرها به اندازه واقعی خود نزدیک می شوند، همگرا می شوند. بنابراین، در ابتدا از این تخمین مقیاس برای تحمیل مقیاس بر کل مدل (شامل مسیر و ابر نقطه) استفاده شد. یک مثال گویا از این فرآیند در زیر نشان داده شده استشکل 5 .
چندین تخمین مقیاس ممکن مختلف، یکی برای هر نشانگر به دست آمد. تخمین واقعی ژست سه بعدی نشانگرهای ArUco اطلاعاتی را از پیش بینی های سیستم مختصات دوربین در حال تبدیل به فضای جهان ترکیب می کند. ما از اطلاعات وضعیت دوربین برای تبدیل مختصات دوربین به مختصات دنیای واقعی استفاده می کنیم. روش تنظیم تک چشمی SLAM مقیاس-آگنوستیک است، اما قادر است متغیر مقیاس ناشناخته را به جای اینکه در هر محور باشد، به یک مقدار محدود کند، که مشکل تخمین مقیاس را ساده می کند.
یک رویکرد جایگزین برای مسئله برآورد مقیاس با این فرض انجام شد که دو نشانگر به طور دقیق از قبل شناسایی شده اند. روش قبلی هنوز برای تخمین مقیاس نشانگر صحیح و میانگین موقعیت های نشانگر برای به دست آوردن تخمین موقعیت یک نشانگر خاص استفاده می شود. سپس، بر اساس ضریب تبدیل مقیاس مطلق بین دو سیستم مختصات به عنوان نسبت فواصل بین دو نشانگر، نشانگرهای اول و دوم انتخاب شدند که معمولاً دقیقتر هستند، زیرا در مسیر مسیر زودتر قرار دارند. سپس از ضریب تبدیل مقیاس برای تبدیل از واحدهای سیستم مختصات Orb-Slam2 به واحدهای دنیای واقعی استفاده شد. مکان واقعی هر نقطه در سیستم مختصات Orb-Slam2 با در نظر گرفتن حاصل ضرب مکان برای هر محور با ضریب مقیاس، مجدداً ارائه می شود.
اگرچه در ابتدا، رویکرد اولیه فوق کاملا امیدوارکننده به نظر میرسید، اما برخی مسائل را در راستای دقت تخمینها و کارایی الگوریتمهای پردازش ارائه کرد، واقعیتی که پژوهش ما را به رویکرد پیچیدهتری هدایت کرد: روش همگرایی چند خطی.
2.4. روش همگرایی چند خطی
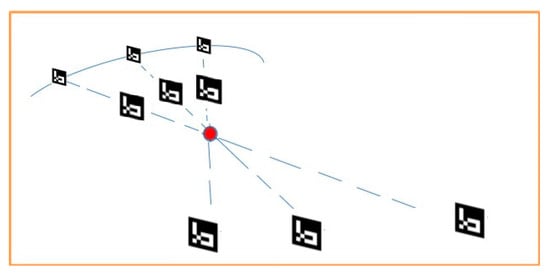
در طول آزمایش، تخمین پوز نشانگرها در فضای سه بعدی، از روال معمولی ناشی میشود که موقعیت گوشههای نشانگر ArUco را همراه با اندازه نشانگر در دنیای واقعی، ضرایب دوربین و پارامترهای اعوجاج میگیرد. هنگامی که چندین نشانگر شناسایی وجود دارد، روش تاکنون مکان نشانگرها را میانگین میگیرد و یک حالت واحد تولید میکند. این تخمینها میتوانند تخمین مکان نشانگر را سوگیری کنند، به طوری که بسیاری از موقعیتها با ابر نقطه هماهنگ نیستند.
روش همگرایی چند خطی پیادهسازی شده پیشنهادی (MLCM)، با رویکردی جدید با این موضوع مواجه میشود. MLCM به جای تخمین هر ژست به طور جداگانه و ترکیب آنها با میانگینگیری ترجمهها و چرخشها (از طریق درونیابی کواترنیونی)، روی بخشهای خطی تمرکز میکند که هر تخمین پوز را با موقعیت دوربینی که نشانگر مربوطه را شناسایی کرده است، مرتبط میکند. این رویکرد منجر به روش جدیدی برای تعیین مکان میشود: اگرچه نشانگرها دارای مکانهایی هستند که بالاتر از حقیقت تعیینشده زمین هستند، با تغییر اندازه هر نشانگر، میتوان آن را با مختصات حقیقت زمین بهمراتب دقیقتر تراز کرد. روش. با این حال، تغییرات جزئی اندازه برای هر نشانگر جداگانه است. در عین حال، خطوطی که مرکز هر نشانگر را با دوربین مربوطه به هم متصل میکنند، در صورت کشیده شدن، قرار میگیرند.شکل 6 ).
این معقول است، زیرا امتداد خط همه موقعیتهای ممکن نشانگر را با توجه به موقعیت گوشه آن روی صفحه، برای همه اندازههای نشانگر ممکن فراهم میکند. از طریق آزمایشها، مشخص میشود که مکان نشانگر به عنوان تابعی از اندازه آن، با خطی مطابقت دارد که امتداد بخش خط بین موقعیت نشانگر و وضعیت دوربین برای هر اندازه است.
اندازه نشانگری که SolPnP برای اندازه واقعی خود استفاده می کند بر حسب متر تنظیم می شود. سپس، از بهینهسازی حداقل مربعات شبه معکوس [ 29 ، 30 ] برای به دست آوردن نقطهای که تمام خطوط اتصال همگرا میشوند، استفاده میشود. معادله نهایی به شکل S * p = C (13) است، که p حل حداقل مربعات است:
هر خط “i” با نقطه شروع “ai” و جهت آن “ni” که یک بردار واحد است، تعریف می شود. فاصله بین مرکز هر نشانگر و حالت دوربین مربوطه با “di” در حالی که تعریف می شود (پ – آمن)تی nمنفرافکنی است پ – آمندر خط “i”. در رابطه (9)، مجموع مربع های فاصله “di” به حداقل می رسد در حالی که در رابطه (10)، مشتق نسبت به p با کمک معادلات (11) و (12) محاسبه می شود تا معادله (13) تشکیل شود. .
آخرین خط نتیجه به شکل S × p = C (13) است، که در آن S یک ماتریس 3×3 است، در حالی که C و p بردارهای 3×1 هستند. اگر p نقطه تقاطع همه خطوط بود، آنگاه S معکوس خواهد بود و ضرب در معکوس S از سمت چپ، یک راه حل شکل بسته برای p به ما می دهد. با این حال، به دلیل اشتباهات در برآورد خطوط، آنها به طور کلی در یک نقطه قطع نمی شوند. در نتیجه، بهینهسازی حداقل مربعات برای به حداقل رساندن فاصله نقطه از تمام خطوط، با استفاده از ماتریس شبه معکوس S+ استفاده میشود.
با حل این معادله (14)، و تنظیم ترجمه جهانی هر نشانگر ArUco به نقطه حل مربوطه p، یک روش قوی برای تخمین مکان نشانگرها داریم.
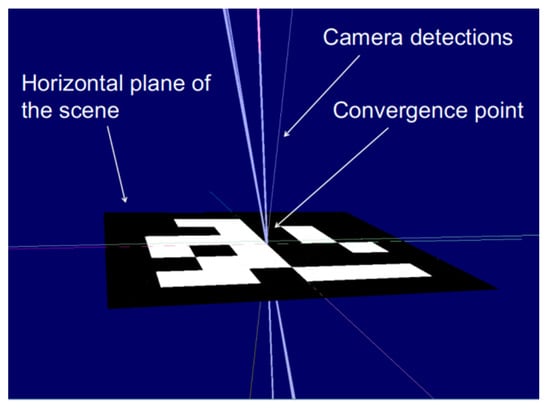
2.5. روش تراز صفحه
یک مسئله در مورد تخمین پوز نشانگر این بود که پوز نشانگر مبدا مبدا یک سیستم مختصات را تعریف می کند. با گسترش محورهای آن سیستم مختصات، هر گونه خطای چرخشی را در تخمین پوز نشانگر ترکیب میکنیم، به طوری که تخمین پوز هر نشانگر دیگری در صحنه به دلیل عدم همسویی محور، خطاهای ترجمه ایجاد میکند. قرار دادن نشانگر ArUco بر روی یک سطح صاف انجام می شود که سطح افقی حقیقت زمین صحنه را تعیین می کند ( شکل 6 ). بخش هایی از این صفحه افقی تخمین زده می شود (با خطا) و به نقاطی در خروجی ابر نقطه الگوریتم SLAM اختصاص داده می شود.
به منظور تراز کردن نشانگر با ابر نقطه، تقسیم بندی صفحه بر روی ابر نقطه با استفاده از کتابخانه pcl python انجام می شود. فرآیند تقسیمبندی از الگوریتم RANSAC برای تولید بخشی از ابر نقطهای استفاده میکند که با یک صفحه مطابقت دارد در حالی که دسترسی به ضرایب صفحه را میدهد، به شکل ax + by + cz + d = 0.
در همان زمان، می تواند بردار نرمال را از ضرایب صفحه بدست آورد و n = [a, b, c] را تشکیل دهد. بردار نرمال حالت نشانگر با چرخاندن بردار نرمال یک نشانگر بدون چرخش تعیین می شود، به طوری که با استفاده از ماتریس چرخشی که هر نشانگر با آن مرتبط است، موقعیت چرخشی نشانگر مطابقت داشته باشد.
در نهایت دو بردار معمولی تولید شده است که در صورت عدم نیاز به تراز با هم تطبیق داده می شوند. به طور کلی، ژست نشانگر کمی با ژست مورد نظر متفاوت خواهد بود. بردارهای معمولی برای تعریف کل پوز نشانگر کافی نیستند، بنابراین مناسب ترین راه برای تراز کردن نشانگر با ابر نقطه، انجام چرخشی است که وقتی روی بردار حالت عادی اعمال می شود، آن را با بردار نرمال صفحه تراز می کند. . با بیان این چرخش بر اساس بردارهای نرمال، میتواند آن را به عنوان یک ماتریس چرخش در ماتریس چرخش پوز (از طریق ضرب ماتریس) اعمال کند و هر سه زاویه چرخش را همزمان تعریف کند:
با استفاده از فرمول های فوق، یک ماتریس تبدیل U به دست می آید (معادل (20)). ضرب U با بردار v بیانگر چرخش A به B است که در آن A و B بردارهای نرمال محلول هستند. به جای ضرب U با یک بردار، می توان آن را با ماتریس چرخش متناظر با پوز نشانگر ضرب کرد تا یک حالت جدید تشکیل شود. سپس نرمال نشانگر با صفحه عادی تراز خواهد شد.
ماتریس U، وقتی با ماتریس چرخش نشانگر (U × R) ضرب می شود، یک ماتریس چرخشی جدید را تشکیل می دهد که با صفحه نرمال تراز است. برای اینکه الگوریتم به اندازه کافی نقاط را برای به دست آوردن یک نرمال دقیق مطابقت دهد، یک روش تقسیم صفحه بر روی کل ابر نقطه انجام می شود، در حالی که پس از آن، این روش دوباره اعمال می شود، اما فقط به صورت محلی (شعاع 1 متر). در نهایت، حداقل فاصله بین شاخص ترین صفحه نرمال شعاع 1 متری و مجموعه نرمال ها از کل ابر نقطه تخمین زده می شود. بنابراین، صفحه نرمال از کل ابر نقطه استخراج میشود، که به بهترین وجه با سطح نرمال محلی مطابقت دارد. با انجام این روش، می توان هم موقعیت و هم چرخش نشانگر ArUco را تصحیح کرد که منجر به اندازه گیری های قوی و یک تعریف دقیق از سیستم مختصات مبدا می شود.
3. نتایج
برای اعتبار سنجی روش پیشنهادی، یک محیط آزمایشی فرموله شد که هشتاد (80) بار تکرار شد تا شرایط بهینه ای را که بالاترین دقت را بدست می آورد، تعریف کند. در طول این مطالعه، سه مجموعه آزمایشی داخلی و خارجی اضافی برای کمک به توسعه و بهینهسازی روششناسی اجرا شده انجام شده است. همه نتایج قابل مقایسه با مجموعه نهایی ارائه شده در اینجا ارائه کردند.
برای اجرای آزمایش از دو نشانگر ArUco با اندازه 0.20 متر استفاده شد و در نزدیکی ساختمان قرار گرفت تا به ترتیب مبدا و هدف را مشخص کند. نشانگر مبدا معمولاً به عنوان یک نقطه مرجع برای نشانگر هدف در صحنه استفاده می شود، زیرا فرض می شود موقعیت آن مشخص است. به طور خاص، نشانگر مبدا با مختصات 0، 0، 0 در محورهای X، Y و Z تعریف می شود، در حالی که مختصات نسبی حقیقت زمین نشانگر هدف با استفاده از نقطه مرجع (نشانگر مبدا) اندازه گیری می شود.
سنسور اپتیکال دوربین دارای وضوح تصویر 1280 × 800 پیکسل، نسبت ابعاد سنسور 8:5، فاصله کانونی 1.93 میلی متر، فوکوس ثابت، در حالی که فرمت تصویر 10 بیت RAW است.
دوربین مسیری را دنبال می کند که به شکل زاویه راست نزدیک می شود. نشانگر هدف باید در انتهای مسیر شناسایی شود، در حالی که نشانگر مبدا بلافاصله پس از شروع فیلمبرداری شناسایی می شود. در تمام تکرارهای آزمایش، ویدیوها با سرعت 90 فریم در ثانیه با وضوح 848 × 480 ضبط میشوند. منطقه مورد نقشه برداری یک منطقه شهری است که شامل ساختمان ها و اشیاء دست ساز، ماشین ها و مناطق پوشش گیاهی می شود. ( شکل 7 ). اندازهگیریهای اولیه و اعتبارسنجی منطقه از طریق ایستگاههای کل، فاصلهسنجهای الکترونیکی و گیرندههای GNSS انجام شد.
شرایط و تکنیک هایی که بر نتایج تأثیر می گذارند و در هر مجموعه ای از آزمایش ها در نظر گرفته می شوند به شرح زیر است:
در مورد جهت گیری دوربین، مشاهده شده است که روش پیشنهادی زمانی که دوربین به جای زمین به افق نگاه می کند، نتایج دقیق تری را استخراج می کند، زیرا در تنظیمات تک چشمی مانند تنظیم حالت استریو اطلاعات عمق وجود ندارد و الگوریتم ها به اطلاعات بیشتری نیاز دارند. در مورد محیط اطراف (به عنوان مثال، ساختمان ها، اتومبیل ها، درختان) به منظور انجام تخمین های دقیق تر از منطقه نقشه برداری. با این حال، برای دوربین بسیار مهم است که نشانگرها را هنگامی که به آنها نزدیک است برای تخمین پوز آنها هدف قرار دهد. سرعت ایده آل دوربین حدود 3.5 تا 4.0 کیلومتر در ساعت است زیرا ویدیوی استخراج شده حاوی مقدار کافی داده برای پردازش کارآمد است. در سرعتهای بالاتر، سیستم ممکن است اطلاعات مهم را به دلیل از دست دادن ردیابی الگوریتم SLAM از دست بدهد، در حالی که در سرعتهای پایینتر، الگوریتمهای پردازش بدون هیچ بهبودی در نتایج زمانبر میشوند. یکی دیگر از عواملی که بر نتایج تأثیر می گذارد، روشنایی است. مشاهده می شود که سیستم برای شناسایی نشانگر هدف در شرایط نور کم، به عنوان مثال، سایه زیاد به دلیل ابرهای سنگین، با مشکلاتی مواجه می شود.
به دنبال روش فوق، مجموعهای از آزمایشها با همان تنظیمات انجام شد. خروجی هر آزمایش شامل یک ابر نقطه ای است که منطقه مورد نظر، مسیر حرکت دوربین، تخمین مختصات نسبی نشانگر هدف و تخمین فاصله بین مبدا و نشانگر هدف را ترسیم می کند.
صدق زمین مختصات نسبی نشانگر هدف عبارتند از: X: 53.2 سانتی متر، Y: 1570 سانتی متر Z: 0 سانتی متر. مختصات Z به عنوان صفر تعریف می شود زیرا نشانگر در زمینی هموار و صاف و بدون اختلاف ارتفاع قرار گرفته است. نتایج تجربی زیر به تدریج ارائه میشوند تا شامل (الف) یک اندازهگیری معمولی واحد برای کسب درک اولیه از نتایج و آمار ساده، (ب) و (ج) یک گروه خوشهای دوگانه از اندازهگیریها که «بالاتر» و «پایینتر» را ارائه میکنند. دقت و (د) یک نتیجه کلی و فراگیر. در جدول 1 ، نمونه ای از یک آزمایش معمولی که در آن حقیقت پایه، تخمین ها و خطای مربوط به نشانگر هدف نشان داده شده است:
خطاهای X، Y، Z و فاصله با تفاوت بین مختصات برآورد شده و حقیقت زمین اندازه گیری شده مربوطه محاسبه شد.
اکثر نتایج تجربی نشان دادند که مختصات نسبی نشانگر هدف و فاصله بین نشانگرهای مبدأ و هدف دارای خطای افقی (RMSExy) 26 سانتی متر است ( جدول 2 را ببینید ). پس از انجام کل مجموعه آزمایش ها، دو خوشه مجزا از دقت آشکار شد ( جدول 2 و جدول 3 ). این واقعیت، همانطور که بعداً مورد بحث قرار گرفت، میتواند در ارائه تخمین مختصات پیشرفته کاملاً مفید باشد، زیرا تکرار اندازهگیری ممکن است به سمت یک راهحل با دقت بالاتر مجبور شود. در جدول 2 ، میانگین خطاهای x، y، z و فاصله، انحراف معیار و خطاهای RMSE نتایجی که توزیع خوشه ای در حدود 15 سانتی متر داشتند، ارائه شده است:
همانطور که در جدول 2 نشان داده شده است، تفاوت بین حقیقت زمین و برآورد نشانگر هدف دارای میانگین و خطای RMSE 19 سانتی متر با انحراف معیار حدود 6 سانتی متر در محور X است در حالی که در محور و فاصله Y ، میانگین و خطای RMSE حدود به ترتیب 15 و 16 سانتی متر با انحراف معیار 8 سانتی متر. خطای کمتر در محور Z که حدود 4 سانتی متر با انحراف معیار 2.9 سانتی متر است، وجود دارد.
در برخی از تکرارهای آزمایش، نتایج با خطای افقی (RMSE xy) 50.5 سانتیمتر دقت کمتری داشتند. میانگین و انحراف معیار این نتایج در جدول 3 ارائه شده است :
در مجموعه آزمایشاتی که در جدول 3 در نظر گرفته شده است ، دقت عمدتاً در محور Y و در تخمین فاصله کاهش یافته است. به طور خاص، در محور X خطا به طور متوسط 26 سانتی متر با انحراف معیار 14 سانتی متر و خطای RMSE 29 سانتی متر است در حالی که میانگین و خطای RMSE در Y و در فاصله حدود 40 سانتی متر با انحراف معیار وجود دارد. از 16 سانتی متر در طول آزمایش مشاهده شد که تخمینها در محور Y نسبت به تخمینها در محورهای X و Z مستعد خطا بودند زیرا مبدأ و نشانگر هدف در فاصله بیشتری روی Y قرار گرفتند.محور و در نتیجه، انحرافات تصادفی از شرایط تعریف شده در طول آزمایش، توانست بر Y و در نتیجه تخمین فاصله را تحت تأثیر قرار دهد. در مورد محور Z ، دقت بالای تخمین ها در آن مجموعه از آزمایش ها نیز با میانگین و خطای RMSE حدود 7.0 سانتی متر و انحراف استاندارد 4.5 سانتی متر حفظ می شود.
به منظور برآورد کلی از دقت روش شناسی این مطالعه، میانگین و انحراف معیار تفاوت بین حقیقت زمین و تخمین نشانگر هدف و خطاهای RMSE با در نظر گرفتن تمام تکرارهای آزمایش ارائه شده است ( جدول 4 ).
همانطور که در جدول 4 ارائه شده است ، محور X دارای میانگین حدود 23 سانتی متر با انحراف معیار حدود 11 سانتی متر و خطای RMSE 25 سانتی متر است در حالی که در محور و فاصله Y ، میانگین حدود 28 سانتی متر با انحراف معیار 18 سانتی متر است. و خطای RMSE 32 سانتی متر است. محور Z با میانگین حدود 5.5 سانتی متر، انحراف معیار حدود 4 سانتی متر و خطای RMSE 6.5 سانتی متر بیشترین دقت را دارد. در نهایت خطای افقی (RMSE xy) با در نظر گرفتن تمام تکرارهای آزمایش حدود 41 سانتی متر است.
4. بحث
از طریق این مطالعه، یک روش جدید برای نقشهبرداری سریع در محیطهای فاقد GNSS پیشنهاد شده است. این روش با استفاده از یک پهپاد مجهز به یک دوربین، نشانگرها و نقاط دلخواه را در یک محیط ناشناخته بومی سازی می کند. پهپاد از طریق یک مسیر پروازی حرکت می کند و یک یا دو نشانگر از پیش تعیین شده را شناسایی می کند که مکان شناخته شده ای به آنها اختصاص داده شده است و موقعیت آنها را تخمین می زند. در ابتدا، یک سیستم مختصات محلی برای صحنه با مبدأ تعریف شده توسط نشانگر اولیه با مکان مشخص تعریف میشود، در حالی که در نتیجه، مختصات نسبی نشانگرهای هدف با استفاده از روشهای توسعهیافته همگرایی خطوط چندگانه و تراز صفحه محاسبه میشود. در طول آزمایش، چالش اصلی محلی سازی یک نقطه بصری هدف در فاصله حدود 16 متری از مبدا بود.
با توجه به اینکه در مجموعههای آزمایشی، از یک حسگر نوری استفاده شده است، تخمین مختصات نشانگر به طور قابلتوجهی به مختصات حقیقت زمین نزدیک است. تمام تکرارهای آزمایش در یک دوره یک ماهه در شرایط مشابه انجام شد: پهپاد یک مسیر با زاویه قائمه را دنبال کرد در حالی که نشانگرها فاصله حقیقت زمینی در حدود 16 متر داشتند. در طول تجزیه و تحلیل نتایج، مشاهده شد که پس از هشتاد (80) تکرار، خطاها در دو خوشه مجزا توزیع شدند: خوشه اول اکثر نتایج را با خطای افقی (RMSE xy) زیر 30 سانتی متر نشان می دهد در حالی که خوشه دوم نشان دهنده اکثر نتایج است. برخی از تکرارهای آزمایش را با دقت کمتر در تخمین Y و Distance (40 سانتی متر) نشان می دهد.جدول 2که پارامترهای آماری خوشه اول را ارائه می دهد، نشان می دهد که این روش قادر به تخمین نشانگر هدف با دقت افقی 25 سانتی متر و دقت عمودی 5 سانتی متر است. جدول 3 که پارامترهای آماری خوشه دوم را نشان می دهد که دقت معقول در محور X و دقت بالا در محور Z را نشان می دهد در حالی که تخمین Y و فاصله از افزایش خطا با میانگین 40 سانتی متر و انحراف معیار حدود 16 سانتی متر رنج می برند. . این خطا توجیه شده است، زیرا در Y نشانگرها فاصله بیشتری دارند (حدود 16 متر) که اگر انحرافات تصادفی در حین انجام آزمایش اتفاق بیفتد و از شرایط تعریف شده جدا شود، بر دقت تأثیر می گذارد. سرانجام،جدول 4که پارامترهای آماری تمامی تکرارهای نتایج آزمایش را ارائه میکند و روش شناسی را با دقت افقی کلی 41 سانتیمتر و دقت عمودی 6.5 سانتیمتر تأیید میکند.
این تجزیه و تحلیل با هدف اصلی این مطالعه برای به دست آوردن دقت 50 سانتی متری در شناسایی مکان های دلخواه در صحنه تا زمانی که از مکانی که قبلاً ارجاع جغرافیایی داده شده است فاصله زیادی نداشته باشند، همسو است. زمانی که دریافت سیگنال GNSS برای محلی سازی کافی نباشد، مختصات محلی یک نقطه مشخصه واحد به موقعیت های مختلف در زمان واقعی منتقل می شود. علاوه بر این، امکان ارائه مختصات در یک سیستم مختصات جهانی وجود دارد.
اما چگونه این روش می تواند به یک وظیفه نقشه برداری در دنیای واقعی رسیدگی کند؟ اول، هنگامی که نقشه برداری سریع هدف یک مطالعه است، این روش به دلیل سادگی در اندازه گیری و نیازهای تجهیزات، پتانسیل زیادی را فراهم می کند. از طریق یک پهپاد با استفاده از یک دوربین معمولی، می توان هزاران مختصات نقطه را در چند دقیقه با دقت 50 سانتی متر یا کمتر به دست آورد. اما قدرت اساسی روش پیشنهادی در مرحله فعلی آن، این است که روش، دقت آن را بدون نیاز به یک روش اعتبارسنجی پس از پردازش اضافی تخمین میزند. از طریق نشانگرهای هدف یا بسته شدن حلقه، در پایان روش نقشه برداری، کاربر از دقت کلی روش که ممکن است از چند سانتی متر تا 50 سانتی متر باز شود، آگاه خواهد شد. با توجه به واریانس خطای بسیار زیاد و خوشه بندی دقت ها در دو مجموعه اصلی، که مربوط به شرایط محلی است، کاربر ممکن است انتخاب کند که روش نگاشت را مجدداً اجرا کند، در صورتی که تخمین دقت در مرزهای بالای آن باشد. بنابراین، اگر نتایج رضایت بخش نباشد، این امکان وجود دارد که با تغییر شرایط نوری یا وضعیت دوربین، نتایج بسیار بهتری به دست آورید. این اطلاعات در پایان پردازش در دسترس کاربران قرار می گیرد که می تواند در محل تکمیل شود. به عبارت دیگر، پهپاد ممکن است در شرایط مختلف و جهت گیری دوربین، دو بار از منطقه مورد نظر برای جمعآوری فیدهای تصویر/ویدئو عبور کند تا به الگوریتمها در ارائه نتایج بهینه کمک کند. این امکان وجود دارد که با تغییر شرایط نوری یا وضعیت دوربین، نتایج بسیار بهتری به دست آورید. این اطلاعات در پایان پردازش در دسترس کاربران قرار می گیرد که می تواند در محل تکمیل شود. به عبارت دیگر، پهپاد ممکن است در شرایط مختلف و جهت گیری دوربین، دو بار از منطقه مورد نظر برای جمعآوری فیدهای تصویر/ویدئو عبور کند تا به الگوریتمها در ارائه نتایج بهینه کمک کند. این امکان وجود دارد که با تغییر شرایط نوری یا وضعیت دوربین، نتایج بسیار بهتری به دست آورید. این اطلاعات در پایان پردازش در دسترس کاربران قرار می گیرد که می تواند در محل تکمیل شود. به عبارت دیگر، پهپاد ممکن است در شرایط مختلف و جهت گیری دوربین، دو بار از منطقه مورد نظر برای جمعآوری فیدهای تصویر/ویدئو عبور کند تا به الگوریتمها در ارائه نتایج بهینه کمک کند.
5. نتیجه گیری ها
این مطالعه، روشی را پیشنهاد میکند که یک منطقه مورد نظر تخریبشده با سیگنال GNSS را نقشهبرداری میکند و دقت قابل قبولی برای برنامههای نقشهبرداری سریع ارائه میدهد. روش مطالعه، ترکیبی از یک الگوریتم SLAM (ORB-SLAM2) با پردازش تصویر، و تکنیک های هندسه محاسباتی به منظور بومی سازی نقاط مشخصه در یک سیستم مختصات محلی با دقت 50 سانتی متر یا بهتر است. سهم اصلی این مطالعه، ارائه یک رویکرد مقرون به صرفه از نظر تجهیزات است، زیرا تنها یک پهپاد، یک حسگر نوری واحد و یک نشانگر بصری برای انجام بومیسازی نقاط هدف و نقشهبرداری از ناحیه مورد نیاز است. علاقه. در مقایسه با روشهای دیگر، پهپاد به گیرنده GNSS یا IMU نیاز ندارد. نشانگر مورد استفاده را می توان در نزدیکی منطقه مورد نظر، نزدیک به محل برخاستن پهپاد مستقر کرد.
اگرچه این روش یک روش جایگزین نقشه برداری را برای پروژه های نقشه برداری سریع معرفی می کند، برخی از جنبه های روش می تواند بهبود یابد. هدف نهایی این مطالعه، نگرش خودمختار پهپاد و تنظیمات مربوطه برای ارائه اندازهگیریهای بهینه نسبت به نقشهبرداری سریع یک محیط ناشناخته تنها با استفاده از یک پهپاد، یک سنسور نوری و حداقل یک نشانگر بصری است. هدف این است که بهینه سازی ممکن است سطح کلی دقت را در شرایط و تنظیمات مختلف به کمتر از 30 سانتی متر کاهش دهد. خطا در محل آزمایش با کمک تجهیزات توپوگرافی-GNSS برآورد شد. در جریان این مطالعه، حداقل سه مجموعه آزمایش دیگر در سایر مکانهای آزمایش (داخلی و بیرونی) انجام شد که نتایج قابل مقایسه با مجموعه آزمایش نهایی ارائه شده در اینجا را نشان میدهد. به منظور آزمایش بیشتر، بهینه سازی و استاندارد کردن روش ما، آزمایش های گسترده ای باید در محیط های مختلف انجام شود، در حالی که روش های آماری به کمک IMU و GNSS می توانند مقایسه شوند. روش دیگر برای مقایسه و افزایش دقت نقشه برداری سریع که در حال حاضر با دریافت خطای کمتر از 10 سانتی متر انجام می دهیم، استفاده از سنسورهای نوری مختلف مانند دوربین استریو عمق است. با این حال، همه این رویهها از هدف اولیه ما دور میشوند، که این است که سطوح دقت نقشهبرداری سریع را با استفاده از پهپادهای معمولی، خارج از قفسه و نشانگر چاپ شده با حداقل هزینه انجام دهیم. روش دیگر برای مقایسه و افزایش دقت نقشه برداری سریع که در حال حاضر با دریافت خطای کمتر از 10 سانتی متر انجام می دهیم، استفاده از سنسورهای نوری مختلف مانند دوربین استریو عمق است. با این حال، همه این رویهها از هدف اولیه ما دور میشوند، که این است که سطوح دقت نقشهبرداری سریع را با استفاده از پهپادهای معمولی، خارج از قفسه و نشانگر چاپ شده با حداقل هزینه انجام دهیم. روش دیگر برای مقایسه و افزایش دقت نقشه برداری سریع که در حال حاضر با دریافت خطای کمتر از 10 سانتی متر انجام می دهیم، استفاده از سنسورهای نوری مختلف مانند دوربین استریو عمق است. با این حال، همه این رویهها از هدف اولیه ما دور میشوند، که این است که سطوح دقت نقشهبرداری سریع را با استفاده از پهپادهای معمولی، خارج از قفسه و نشانگر چاپ شده با حداقل هزینه انجام دهیم.







بدون دیدگاه