

نقشه برداری حساسیت زمین لغزش با استفاده از یادگیری ماشینی: مطالعه موردی دانمارکی



گروه برنامه ریزی، دانشگاه آلبورگ، رندزبورگ 14، 9000 آلبورگ، دانمارک
*
نویسنده ای که مسئول است باید ذکر شود.
دریافت: 20 آوریل 2022/بازبینی شده: 21 مه 2022/پذیرش: 25 مه 2022/تاریخ انتشار: 27 مه 2022
(این مقاله متعلق به موضوع ویژه تجزیه و تحلیل DEM با پشتیبانی از GIS برای مشخص کردن دینامیک منظر کوتاه و بلند مدت است )
چکیده
:
نقشهبرداری زمین لغزشها، که در سال 2021 توسط سازمان زمینشناسی دانمارک و گرینلند (GEUS) انجام شد، 3202 زمین لغزش را در دانمارک نشان داد که نشان میدهد ممکن است مشکلی بزرگتر از آنچه قبلاً تصدیق شده بود ایجاد کنند. علاوه بر این، فرض بر این است که تغییر اقلیم بر وقوع زمین لغزش در آینده تأثیر دارد. هدف از این مطالعه انجام اولین نقشهبرداری حساسیت زمین لغزش (LSM) در دانمارک، کاهش تعصب جغرافیایی موجود در مطالعات LSM، و شناسایی مناطق مستعد به لغزش در آینده به دنبال مسیر غلظت نماینده RCP8.5، بر اساس مجموعهای است. متغیرهای توضیحی در منطقه مورد علاقه واقع در اطراف آبدره Vejle، Jutland، دانمارک. زیر مجموعه ای از فهرست زمین لغزش ارائه شده توسط GEUS به عنوان داده های حقیقت زمین استفاده می شود. سه الگوریتم یادگیری ماشین (ML) به خوبی تثبیت شده – جنگل تصادفی، ماشین بردار پشتیبان و رگرسیون لجستیک – برای طبقهبندی نمونههای داده به عنوان لغزش یا غیر لغزش آموزش داده شدند، وظیفه ML را به عنوان یک طبقهبندی باینری و بیان نتایج در شکل احتمال به منظور تولید نقشه های حساسیت. نتایج طبقهبندی از طریق دادههای آزمون و از طریق مجموعه دادههای خارجی برای منطقهای که خارج از منطقه مورد علاقه قرار دارد، تأیید شد. در حالی که عملکرد پیشبینی بالا کمی در بین سه مدل در دادههای آزمایش متفاوت بود، LR و SVM دقت پایینتری را در خارج از منطقه مورد مطالعه نشان دادند. نتایج نشان میدهد که مدل RF دارای استحکام و قابلیت کاربرد در نقشهبرداری حساسیت زمین لغزش در مناظر کم ارتفاع دانمارک در حال حاضر است. نقشه برداری انجام شده می تواند به گامی رو به جلو در جهت برنامه ریزی برای اقدامات کاهشی و حفاظتی در مناطق مستعد زمین لغزش در دانمارک تبدیل شود و سیاست گذاران را با حمایت تصمیم گیری لازم ارائه دهد. با این حال، نقشه سناریوی تغییرات اقلیمی آینده کاهش مناطق مستعد را نشان میدهد و سوال انتخاب مدلها و متغیرهای اقلیمی در تحلیل را مطرح میکند.
کلید واژه ها:
مدل سازی پیش بینی ; پیش بینی فضایی دانمارک ؛ رانش زمین ؛ رگرسیون لجستیک ; ماشین بردار پشتیبانی ; جنگل تصادفی ; تغییرات آب و هوایی ؛ RCP8.5
1. مقدمه
زمین لغزش به طور سنتی به عنوان یک پدیده محدود به مناطق بسیار شیب دار و غیرقابل پذیرایی [ 1 ] تلقی می شود. با این حال، همیشه اینطور نیست، زیرا بسیاری از مناطق تحت تأثیر زمین لغزش قرار می گیرند [ 1 ]. زمین لغزش یکی از گسترده ترین خطرات ژئوفیزیکی است که بین سال های 1997 تا 2017 باعث 378 فاجعه شد که تقریباً 4.8 میلیون نفر را تحت تأثیر قرار داد و منجر به مرگ 18.414 نفر شد. علاوه بر این، رانش زمین باعث خسارات اقتصادی تخمینی 8 میلیارد دلار شده است [ 2 ].
در دانمارک، آگاهی کمی از خطرات مرتبط با زمین لغزش وجود داشته است. این کشور تا حد محدودی بخشی از پایگاههای اطلاعاتی زمین لغزش بینالمللی و اروپایی بوده است، و تا همین اواخر تنها مطالعات کمی در مورد این موضوع انجام شده است که عمدتاً بر تحقیقات میدانی محلی از رویدادهای منفرد متمرکز شدهاند [ 3 ]. در سال 2015، سازمان زمین شناسی دانمارک و گرینلند (GEUS) در مجموع 10 زمین لغزش را گزارش کرد که کمتر از تعداد زمین لغزش در بقیه اروپا است که از 10 لغزش (دانمارک) تا 528.903 زمین لغزش (ایتالیا) متغیر است [ 4 ].]. با این حال، این ممکن است وضعیت واقعی زمین لغزش ها در دانمارک را در مقایسه با بقیه اروپا منعکس نکند، زیرا هر کشور استراتژی های نقشه برداری زمین لغزش متفاوتی دارد، و برخی از کشورها نقشه برداری سیستماتیک زمین لغزش دارند، در حالی که سایر کشورها فقط لغزش های آسیب دیده را گزارش می کنند [ 4 ]. عکسهای ارتو و مدلهای ارتفاعی دیجیتال با وضوح بالا (DEMs) امکان نقشهبرداری دقیق زمین لغزش را فراهم کردهاند. ابتکار داده های باز در دانمارک دسترسی گسترده ای به DEM های واقعی کل کشور با وضوح فضایی 40 سانتی متری [ 5 ] اعطا کرده است و امکان انجام نقشه برداری دقیق و با اطمینان بالا از زمین لغزش ها در دانمارک را فراهم می کند که منجر به فهرست زمین لغزش ها می شود. که شامل 3202 چند ضلعی زمین لغزش است، که نشان می دهد که زمین لغزش ها بیشتر از آنچه قبلاً تایید شده است [ 6 ]].
علاوه بر این، انتظار میرود تغییرات آب و هوایی به وقوع زمین لغزشهای بیشتری در آینده کمک کند، زیرا افزایش دما، بارندگیهای شدید و مکرر، طوفانها و افزایش سطح دریا بر پایداری سنگ بستر تأثیر میگذارد [ 7 ]. مرجع [ 8 ] فهرست مفصلی از تغییرات مرتبط با آب و هوا و اثرات مربوطه آنها بر واکنش زمین لغزش، از جمله عوامل ایجاد کننده زمین لغزش مانند افزایش بارندگی کل، شدت بارندگی، دما، سرعت باد، و مدت زمان، و همچنین تغییرات در سیستم های آب و هوا و متغیرهای هواشناسی مرتبط [ 8 ]، که می توانند نقش عوامل پیش شرطی یا محرک را ایفا کنند [ 9 ]]. علیرغم این واقعیت که بسیاری از محققین تا حدی این متغیرهای آب و هوایی را در نقشهبرداری حساسیت زمین لغزش به عنوان عوامل شرطی گنجاندهاند، به عنوان مثال، [ 10 ، 11 ، 12 ، 13 ، 14 ، 15 ، 16 ، 17 ]، مقالات تحقیقاتی کمی مدلهای پیشبینی خود را توسعه دادهاند. در نظر گرفتن تکامل آب و هوا برای انجام یک ارزیابی کمی از تغییرات فضایی آینده حساسیت زمین لغزش [ 18 ، 19 ، 20 ، 21 ، 22 ، 23]. در حالی که یک مبنای نظری محکم برای ادعای افزایش فعالیت زمین لغزش در نتیجه تغییرات آب و هوایی پیش بینی شده [ 8 ] وجود دارد، با این حال، تاثیر آب و هوا بر واکنش زمین لغزش در وضوح های مکانی و زمانی متفاوت، نامشخص است و نیاز به مطالعات بیشتری در این زمینه دارد. 24 ]، که برای درک و پیش بینی اثرات افزایش یا کاهش این تغییرات مرکزی است [ 25 ].
دانمارک روند جهانی افزایش دما را همانطور که در سناریوهای IPCC پیش بینی شده دنبال می کند و تا سال 2100 انتظار می رود که بارش در زمستان 25 درصد افزایش یابد و موج های طوفانی که از نظر آماری هر 20 سال یک بار اتفاق می افتد، هر یک یا دو سال، در حالی که میانگین سطح دریا با نرخ 2 میلی متر در سال افزایش خواهد یافت [ 26 ]. این عوامل احتمالاً تأثیر شتابدهندهای بر فراوانی زمینلغزشها خواهند داشت، که نیازمند رویکردهای نوآورانه برای نقشهبرداری و پیشبینی تغییرات فعلی و آتی در زمین لغزشها است [ 3 ].
1.1. نقشه برداری حساسیت زمین لغزش
نگاشت حساسیت زمین لغزش احتمال مکانی وقوع زمین لغزش را بیان می کند. این مبتنی بر فرضیات اصلی است که توسط [ 24 ، 27 ، 28 ] ترکیب شده است، که رویدادهای زمین لغزش آثار قابل تشخیص و قابل شناسایی بر جای می گذارند [ 29 ، 30 ، 31 ، 32 ، 33 ]، که احتمال وقوع آنها در مناطقی با شرایط مشابه بیشتر است. به عنوان مناطق آسیب دیده قبلی، و در نتیجه، که گذشته می تواند آینده را توضیح دهد [ 34 ، 35 ، 36 ].
چندین رویکرد برای ارزیابی حساسیت زمین لغزش در ادبیات ارائه و بررسی شده است [ 24 ، 28 ، 37 ، 38 ، 39 ]. مرجع [ 39 ] به دو رویکرد اصلی اشاره می کند: مستقیم و غیر مستقیم. رویکردهای مستقیم عموماً ذهنی تر و کمتر قابل تکرار هستند، زیرا این رویکردها بر اساس تجربیات، تصمیمات و تخمین های کارشناسان است، در حالی که رویکردهای غیرمستقیم عینی تر در نظر گرفته می شوند، زیرا این رویکردها مبتنی بر روابط ریاضی هستند [ 28 ، 39 ].]. پنج گروه روش گستردهتر برای نقشهبرداری حساسیت زمین لغزش در ادبیات متمایز شدهاند، یعنی: نقشهبرداری ژئومورفولوژیکی، تجزیه و تحلیل موجودیهای زمین لغزش، رویکردهای اکتشافی، روشهای مبتنی بر فرآیند، و مدلسازی مبتنی بر آماری [ 24 ، 34 ]. در حالی که کیفیت ارزیابی حساسیت زمین لغزش ارائه شده توسط سه گروه اول می تواند از ناقص بودن و کیفیت موجودی های مورد استفاده، پیچیدگی منطقه مورد نظر و توانایی و قضاوت محققین خبره رنج ببرد [ 40 ، 41 ، 42 ].]، رویکردهای مبتنی بر فرآیند و آماری، که مدلهای مبتنی بر فیزیکی و تجزیه و تحلیل روابط بین عوامل مسبب و وقوع زمین لغزش را ارائه میدهند، به عنوان روشهای کمی مطلوب در مطالعات حساسیت زمین لغزش با تغییر به رویکرد یادگیری ماشین در دهه گذشته در نظر گرفته میشوند [ 24 ]. ]. مرجع [ 37 ] روش های ارزیابی حساسیت زمین لغزش را به دانش محور، داده محور و مبتنی بر فیزیکی تقسیم می کند. روشهای مبتنی بر دادهها مانند یادگیری ماشین نتایج امیدوارکنندهای را نشان میدهند و برای مدلسازی حساسیت زمین لغزش در مناطق بزرگتر رایج شدهاند [ 43 ، 44 ، 45 ]]، که ممکن است به دلیل دادههای ژئوتکنیکی ناکافی و محدود مورد استفاده در مدلهای مبتنی بر فیزیکی، پیچیدگی آنها و زمان مصرف مرتبط باشد [ 46 ، 47 ، 48 ]. مدلسازی مبتنی بر دادهها با این فرض اصلی انجام میشود که احتمال وقوع زمین لغزش در شرایط مشابه رویدادهای زمین لغزش گذشته و حال وجود دارد. رابطه دقیق بین وجود/غیاب زمین لغزش و این شرایط همیشه به خوبی شناخته نشده است، زیرا اندازه گیری این شرایط در مناطق بزرگتر دشوار است، به همین دلیل است که آنها توسط تعدادی پیش بینی کننده یا متغیرهای مستقل نشان داده می شوند [ 48 ].]. مزایای الگوریتمهای یادگیری ماشین مبتنی بر داده نسبت به روشهای مبتنی بر آمار، دقت بالاتر بدون نیاز به مقدار زیادی از دادههای زمین لغزش تاریخی [ 49 ]، عدم نیاز به فرضیات آماری خاص مانند توزیع نرمال و روابط خطی پیشینی است. و سودمندی در تعیین روابط جدید در مجموعه داده [ 45 ]. برخی از الگوریتمهای یادگیری ماشینی تثبیتشده و با عملکرد خوب در نقشهبرداری حساسیت زمین لغزش تاکنون رگرسیون لجستیک [ 50 ]، ماشینهای بردار پشتیبان [ 51 ]، درختهای تصمیمگیری و روشهای مجموعهای مانند بستهبندی، جنگل تصادفی، و جنگل چرخشی بودهاند. [ 52 ، 53 ،54 ، 55 ]، با تکنیک های پیشرفته تر ترکیبی و یادگیری عمیق که در ادبیات ظاهر شده است [ 56 ، 57 ]. هیچ اتفاق نظری در مورد تکنیک یادگیری ماشینی بهینه برای مدلسازی حساسیت زمین لغزش وجود ندارد [ 48 ، 58 ]. بنابراین، عملکرد مدل های مختلف به طور معمول نیاز به ارزیابی و مقایسه در موارد مختلف دارد [ 59 ].
از نظر تنوع موارد، مطالعات حساسیت زمین لغزش مبتنی بر داده ها عمدتاً در مناطق تپه ای یا کوهستانی متمرکز شده است که توجه کمی به زمین های هموار کم ارتفاع داده شده است [ 43 ، 44 ، 45 ، 47 ، 49 ، 53 ، 59 ، 60 ، 61 . ]، با چین، ایتالیا، هند و ترکیه کشورهایی که بیشترین نمایندگی را دارند، تلاش لازم برای کاهش تعصبات جغرافیایی واضح با بررسی مناطق جدید مورد علاقه را برجسته می کند [ 24 ].
1.2. بیان مسئله و اهداف مطالعه
روش مبتنی بر داده مبتنی بر الگوریتمهای یادگیری ماشین نشان داده است که برای نقشهبرداری حساسیت زمین لغزش در مناطق مطالعه کوهستانی و تپهای عملکرد خوبی دارد. با این حال، ادبیات خواستار پیشرفت بیشتر از نظر تنوع مطالعات موردی است. علاوه بر این، تأثیر تغییر اقلیم با استفاده از متغیرهای آب و هوایی آینده بر حساسیت زمین لغزش همچنان نامشخص است. از این رو، هدف اصلی این مطالعه، راهاندازی ابزار مبتنی بر یادگیری ماشینی برای نقشهبرداری حساسیت زمین لغزش در یک منظره کم ارتفاع با تعداد نسبتاً زیادی از رویدادهای زمین لغزش و پیشبینی حساسیت به سناریوی RCP8.5 آینده است. با توجه به این هدف اصلی، این پژوهش در صدد پاسخگویی به سوالات زیر است:
- (1)
-
با توجه به منظره مسطح کم ارتفاع دانمارک، چقدر میتوان از الگوریتمهای یادگیری ماشینی تثبیتشده برای نقشهبرداری حساسیت زمین لغزش استفاده کرد؟
- (2)
-
متغیرهای مختلف مربوط به مکان های حضور زمین لغزش چگونه است؟ اهمیت متغیرهای مختلف در مدل پیش بینی چیست؟
- (3)
-
آیا می توان تأثیر تغییر اقلیم بر حساسیت زمین لغزش را برای سناریوی اقلیمی آینده مدل کرد؟
2. داده ها و مواد
2.1. منطقه مورد علاقه
منطقه مورد علاقه انتخاب شده (AOI)، که در شکل 1 نشان داده شده است، در قسمت شرقی یوتلند، دانمارک، بین Horsens و Kolding قرار دارد و 972 کیلومتر است. 2، شامل 453 زمین لغزش تاریخی به مساحت 3.33 کیلومتر است 2در مجموع. منطقه مورد نظر به دلیل غلظت بالای زمین لغزش ها انتخاب شد، که در آن سه نوع مختلف زمین لغزش نشان داده شده است: لغزش (394)، جریان (31)، و گسترش (28). این شامل 189 زمین لغزش داخلی و 264 زمین لغزش ساحلی است، بسته به فاصله آنها از ساحل، که در آن لغزش های داخلی به عنوان دورتر از 300 متر از ساحل تعریف می شود. مساحت زمین لغزش های منفرد بین 96 متر متغیر است 2برای کوچکترین و 73429 متر 2برای بزرگترین
2.2. فهرست زمین لغزش
فهرست زمین لغزش مورد استفاده در این مطالعه توسط GEUS بر اساس تفسیر متخصص مبتنی بر DEM از سال 2015 و عکسهای ارتوفتوی با وضوح بالا چند زمانی ارائه شده توسط آژانس دانمارکی برای تامین و کارایی داده (SDFE) تولید شده است [ 6 ]. سایه تپه چند جهته مشتق شده از DEM برای شناسایی زمین لغزش ها بر اساس لغزش ها و/یا واحدهای جابجا شده به وضوح قابل مشاهده استفاده شد و این فرآیند توسط سری زمانی عکس های ارتوفوتیو [ 6 ] پشتیبانی شد. این منجر به یک نقشه با اطمینان بالا از لغزش ها شد، که در آن چند ضلعی های زمین لغزش با رسم رئوس در اطراف زمین لغزش های شناسایی شده، فقط شامل لغزش های با مساحت بیش از 25 متر تولید شدند. 2[ 6 ]. موجودی هیچ اطلاعاتی در مورد زمان وقوع زمین لغزش های نقشه برداری شده یا وضعیت فعلی فعالیت آنها ندارد. زیرمجموعه فهرست ملی زمین لغزش که به عنوان متغیر وابسته در این تحقیق مورد استفاده قرار گرفت، شامل 453 زمین لغزش است. Centroids برای هر زمین لغزش محاسبه شد، و حجم نمونه 453 نقطه حضور زمین لغزش در AOI، که در شکل 2 دیده می شود، ارائه شد . ایجاد تنها یک نقطه برای هر زمین لغزش، رفتار برابر را برای همه زمین لغزشها بدون در نظر گرفتن اندازه آنها تضمین میکند [ 62 ]. ایجاد نقاطی که نمایانگر غیر لغزش ها یا عدم وجود زمین لغزش باشد، برای اینکه مدل های ML بین کلاس های زمین لغزش و غیر لغزش تمایز قائل شوند، ضروری است [ 63 ]]. یک نمونه تصادفی از نقاط غیر لغزش، برابر با مقدار مرکز زمین لغزش، با محدودیتهای بدنههای آبی و چندضلعیهای وقوع زمین لغزش با بافر بیرونی 50 متر تولید شد. با تعداد مساوی از نمونه های زمین لغزش و غیر زمین لغزش، می توان به طور مستقیم احتمالات پیش بینی نشده تعدیل نشده را تفسیر کرد [ 62 ] و از عدم تعادل طبقاتی و تعصب مدل اجتناب کرد، جایی که مناطق مستعد زمین لغزش ممکن است به دلیل ارائه بیش از حد موارد غیرقابل طبقه بندی به عنوان ایمن باشند. نمونه های زمین لغزش [ 63 ].
2.3. متغیرهای پیش بینی کننده
علاوه بر متغیر وابسته، ارزیابی حساسیت به اطلاعاتی در مورد عواملی نیاز دارد که می تواند وقوع/عدم زمین لغزش را توضیح دهد. متغیرهای پیش بینی کننده عوامل مستعد کننده زمین لغزش هستند که به عنوان ورودی برای پیش بینی استفاده می شوند. بسیار مهم است که فقط عوامل مرتبط و مناسبی که باعث لغزش می شوند انتخاب شوند، زیرا پیش بینی های اضافی ممکن است منجر به نویز غیرضروری شود و توانایی پیش بینی مدل های یادگیری ماشین را کاهش دهد [ 63 ]. مجموعه ای از عوامل شرطی سازی باید با توجه به یک منطقه خاص انتخاب شود و معمولاً باید ویژگی های منطقه مورد مطالعه، نوع زمین لغزش ها، مقیاسی که تجزیه و تحلیل بر اساس آن انجام می شود، و در دسترس بودن داده ها را در نظر بگیرد [ 64 ].]. هیچ استاندارد یا دستورالعمل جهانی برای انتخاب عوامل وجود ندارد، اما چندین پیشبینی کننده داخلی و خارجی مشترک در مطالعات ارزیابی حساسیت زمین لغزش استفاده شده است [ 63 ]. عوامل داخلی شامل، اما نه محدود به ارتفاع، انحنای پروفیل، شیب، انحنای پلان، فاصله از گسل ها، جهت، فاصله از رودخانه ها، شکل زمین و سنگ شناسی است، در حالی که عوامل خارجی شامل بارش، فاصله از جاده ها و فعالیت لرزه ای هستند. [ 63 ].
این مطالعه در مجموع 29 متغیر از جمله متغیرهای توپوگرافی، هیدرولوژیکی، ژئومورفولوژیکی، انسانی و اقلیمی را در جدول 1 در نظر می گیرد. DEM ها از جمله مهم ترین محصولات داده ای هستند که در مدل سازی زمین لغزش استفاده می شوند، زیرا تعدادی از ویژگی های زمین توضیحی می توانند از آنها مشتق شوند [ 62 ]. این مشتقات DEM به عنوان پروکسی برای فرآیندهای سطحی و شرایط مختلف ژئوفیزیک عمل می کنند و برای نشان دادن روابط پیچیده ژئومورفولوژیکی و ساده تر کردن آنها استفاده می شوند [ 48 ].
ارتفاع همیشه در مطالعات حساسیت زمین لغزش استفاده می شود، زیرا به عنوان نماینده ای برای تغییرپذیری در بارندگی، پوشش گیاهی و خاک عمل می کند [ 62 ]. DEM اصلی در این مطالعه مجدداً به 2 متر نمونه برداری شد، زیرا این وضوح به کاهش اندازه DEM برای محاسبات کمک می کند، در حالی که وضوح را به اندازه کافی بالا نگه می دارد تا زمین لغزش ها را نشان دهد، جایی که کوچکترین آنها مساحتی در حدود 11 × 8 متر دارد. .
شیب گنجانده شده است، زیرا نیروهای نگهدارنده و بی ثبات کننده را کنترل می کند که بر یک شیب تأثیر می گذارد، زیرا برای پایدار نگه داشتن یک شیب تند نسبت به پایدار نگه داشتن یک شیب ملایم، مقاومت بزرگتری مورد نیاز است [ 24 ]. شیب به دو عنصر تقسیم می شود: گرادیان و جنبه. گرادیان حداکثر تغییر در ارتفاع را نشان می دهد، در حالی که جنبه به عنوان جهت قطب نما این تغییر تعریف می شود [ 72 ]. جنبه یک پارامتر دایرهای است که به عناصر سینوسی و کسینوس آن تجزیه میشود و به ترتیب قرار گرفتن زمین در شرق و شمال را برای جلوگیری از ناپیوستگی توصیف میکند [ 62 ].]. شکل پلان و انحنای پروفیل به عنوان متغیرهای پیش بینی کننده استفاده می شوند، زیرا انحنای پروفیل می تواند به عنوان معیاری برای شتاب یا کاهش سرعت جریان در پایین شیب استفاده شود، در حالی که انحنای پلان همگرایی یا واگرایی جریان را در پایین شیب نشان می دهد [ 72 ]. شاخص رطوبت توپوگرافی (TWI) و شاخص موقعیت توپوگرافی (TPI) گنجانده شده است، زیرا آنها اغلب به عنوان پروکسی برای تغییرپذیری فضایی خاک در نظر گرفته می شوند. TWI بر رطوبت خاک در دره ها تأثیر می گذارد، در حالی که TPI تنظیمات ژئومورفولوژیکی را به صورت عددی بیان می کند [ 62 ]]، که در آن مقادیر منفی نشان دهنده مناطقی است که در پایین تر از محیط اطراف مانند دره ها قرار دارند و مقادیر مثبت نشان دهنده مناطقی هستند که بالاتر از میانگین محیط اطراف قرار دارند. در حالی که سایر مشتقات و شاخص های DEM خروجی ابزارهای پردازش زمین هستند، TWI بر اساس [ 72 ] محاسبه می شود:
تیدبلیومن=ل�آتیآ�(�)
که در آن a منطقه شیب کمک کننده (حوضه آبریز) و �زاویه شیب بر حسب رادیان است
شاخص توان جریان (SPI) برای اندازه گیری قدرت فرسایشی جریان آب استفاده می شود [ 72 ]. SPI طبق فرمول محاسبه می شود:
اسپمن=آ∗تیآ�(�)
که در آن a منطقه شیب کمک کننده (حوضه آبریز) و �زاویه شیب بر حسب رادیان است. SPI بیشتر تبدیل به ورود به سیستم می شود. سایر متغیرها نیز ممکن است در مدلسازی حساسیت زمین لغزش مانند انحراف استاندارد ارتفاع یا شیب مؤثر باشند. اینها ناهمواری زمین را بیان می کنند، که انتظار می رود در مناطق پایدار کمتر از مناطق لغزش باشد [ 24 ]. برای این مطالعه، متغیرهای زیر که ناهمواری زمین را توصیف میکنند انتخاب میشوند:
شاخص ناهمواری زمین (TRI) به عنوان اندازهگیری وضعیت سطح زمین در نظر گرفته میشود. TRI به توصیف زمین به عنوان صاف یا ناهموار کمک می کند و واریانس محلی انحناها و شیب ها را به تصویر می کشد [ 72 ]. زبری متغیر دیگری است که برای توصیف وضعیت سطح استفاده می شود [ 73 ]. انحراف معیار (std) شیب نیز در [ 48 ] به عنوان معیاری برای زبری سطح پیشنهاد شد. این به عنوان انحراف استاندارد مقادیر شیب در یک محله سلولی 3×3 محاسبه می شود.
فاصله از نهرها و فاصله از خط ساحلی به عنوان متغیرهای پیش بینی گنجانده شده است. منطق این است که این فواصل می توانند شرایط خاصی را ثبت کنند که ممکن است به ناپایدار کردن پایین یک شیب کمک کند. فقط نهرهای بزرگتر (با عرض بیش از 2.5 متر) همانطور که توسط [ 24 ، 74 ] پیشنهاد شده است در اینجا گنجانده شده است.
فاصله از جادهها، راهآهنها و معادن بهعنوان متغیرهای توضیحی گنجانده شدهاند، زیرا مناطق مجاور آنها به شدت تحتتاثیر فعالیتهای انسانی در حین استقرار، استفاده و نگهداری قرار میگیرند و این تداخل انسانی ممکن است بر پایداری شیبها تأثیر بگذارد [ 1 ]. متغیرهای با فاصله از نهرها، خط ساحلی، جاده ها، راه آهن و معادن با استفاده از فاصله اقلیدسی از ویژگی های مربوطه محاسبه می شوند. فقط فواصل تا یک آستانه معین در نظر گرفته می شود و بنابراین لایه ها بر اساس آن بریده شده و طبقه بندی مجدد شده اند. به عنوان مثال، فرض بر این بود که نهرهای 500 متری تأثیری برابر بر وقوع زمین لغزش دارند که نهرهایی که در فاصله 300 متری قرار دارند. آستانه برای هر یک از متغیرهای ویژگی در جدول 2 مشاهده می شود .
همانطور که توسط [ 60 ] پیشنهاد شد، یک آستانه فاصله 100 متر برای جاده ها و راه آهن انتخاب شد، زیرا فاصله بیش از این آستانه هیچ تاثیری بر وقوع زمین لغزش ندارد. فاصلههایی که از آستانهها فراتر رفتند، همان مقدار آستانه تعیین شدند.
مجموعه داده نوع خاک، زمین شناسی سطح [ 70 ] و ژئومورفولوژی مربوط به فرآیندهای تشکیل در چشم انداز [ 67 ] را توصیف می کند. نقشه زیرزمینی زمین شناسی سنگ بستر را توصیف می کند و چینه شناسی AOI [ 69 ] را به تصویر می کشد، و توپوگرافی پیش از کواترنر، ارتفاع سطح پیش از کواترنر [ 68 ] را توصیف می کند. فاصله از گسل ها به دلیل حضور محدود آنها در AOI به عنوان یک متغیر پیش بینی در نظر گرفته نمی شود.
2.4. داده های آب و هوا – حال و آینده
داده های آب و هوا برای دانمارک توسط DMI بر اساس حداکثر 57 نتیجه مدل آب و هوایی تولید و محاسبه می شود و هم داده های آب و هوای فعلی و هم داده های آب و هوای آینده را نشان می دهد [ 26 ]. داده ها از 18 متغیر مرتبط با آب و هوا تشکیل شده است. با این حال، تنها مواردی که ممکن است با وقوع زمین لغزش ارتباط داشته باشند، گنجانده شدند.
داده های آب و هوایی فعلی بر اساس میانگین دوره مرجع 1981-2010 است. این دوره به دلیل عدم وجود مهر زمانی در فهرست زمین لغزش انتخاب شد. علاوه بر این، دادههای DMI برای تغییرات آب و هوایی آینده به سه دوره زمانی 2011–2040، 2041–2070 و 2071–2100 طبقهبندی میشوند که دوره 2071–2100 انتخاب شده است. مجموعه داده های اقلیمی تغییرات آب و هوایی آینده را مطابق با سناریوهای IPCC RCP4.5 و RCP8.5 نشان می دهد. برای نقشهبرداری حساسیت زمین لغزشها در این مطالعه، دادههای سناریوی RCP8.5 انتخاب شدند، زیرا DMI استفاده از سناریوی RCP8.5 را برای پروژههایی با افق برنامهریزی در سال 2050 توصیه میکند، که در آن استحکام مدل برای سازگاری با تغییرات اقلیمی است. مورد نیاز است [ 75]. از آنجایی که دادههای مربوط به تغییرات آب و هوایی آینده، محاسباتی هستند که از مدلهای اقلیمی مشتق شدهاند، با عدم قطعیت همراه هستند. این عدم قطعیت ها در داده ها به عنوان میانه و صدک های 10 و 90 بیان می شوند، جایی که میانه بهترین تخمین را ارائه می دهد [ 26 ]، و بنابراین در این مطالعه انتخاب شد، همانطور که در جدول 3 مشاهده می شود . مقادیر تغییر نسبی درصد، بین دوره مرجع 1981-2010 و 2071-2100 طبق سناریوی RCP8.5 [ 75 ] است.
فاصله عمودی از آب زیرزمینی در نظر گرفته شد زیرا فرض بر این است که بر پایداری شیب تأثیر می گذارد زیرا خاک اشباع آن را ناپایدارتر می کند و در نتیجه مستعد لغزش می شود. مجموعه داده ها میانگین فاصله عمودی از سطح زمین تا سطح آب زیرزمینی را برای سال های مرجع 1990-2020 نشان می دهد. سناریوی آینده RCP8.5 شامل میانگین تغییرات مورد انتظار در سطح آب زیرزمینی در دوره 2070-2100 است.
مرحله پیش پردازش متداول برای متغیرهای ذکر شده در بالا، آماده سازی آنها به عنوان لایه های شطرنجی با وسعت، وضوح و طرح ریزی مشترک به سیستم مختصات ESPG 25832 برای ایجاد یک پشته شطرنجی است. تمام متغیرها برای حذف سلولهای نشاندهنده آب بریده شدند، زیرا در تجزیه و تحلیل زمین لغزش نامربوط هستند. از آنجایی که DEM برای ارزیابی حساسیت زمین لغزش بسیار مهم است، تمام لایههای شطرنجی دیگر به وضوح 2 متر نمونهبرداری شدند. متغیرهای طبقهبندی با استفاده از یک طرح رمزگذاری یکطرفه که n-1 متغیر باینری جدید را برای هر مجموعه داده طبقهای تولید میکند، دودویی شدند.
3. روش ها
چارچوب روش شناختی این مطالعه در شکل 3 نشان داده شده است و شامل چندین مرحله است که با تعریف مسئله برای یادگیری ماشین به عنوان یک مسئله طبقه بندی باینری (لغزش/غیر لغزش) شروع می شود، سپس انتخاب و جمع آوری داده ها، و آماده سازی متغیرها سپس، مدلهای یادگیری ماشینی تنظیم، ارزیابی و اعتبارسنجی میشوند. مدلها و نقشههای حساسیت نهایی با هم مقایسه شده و نقشه حساسیت زمین لغزش آینده تهیه میشود.
برای بررسی اینکه آیا می توان از متغیرهای آب و هوایی برای پیش بینی تأثیر تغییر آب و هوا بر حساسیت زمین لغزش در دانمارک استفاده کرد، دو مجموعه پیش بینی ساخته شد: مجموعه پیش بینی کننده I – بدون متغیرهای آب و هوا و مجموعه پیش بینی کننده II – با متغیرهای آب و هوایی، همانطور که در شکل 3 مشاهده می شود . چارچوب روششناختی برای هر دو مجموعه پیشبینیکننده یکسان است و مدلها با هر مجموعه پیشبینیکننده به صورت موازی اجرا شدند. علاوه بر این، یک پیشبینی برای سناریوی RCP8.5 آینده برای سالهای 2071-2100 برای Predictor Set II، بر اساس تکامل آینده پیشبینیشده متغیرهای آب و هوایی انتخاب شده، انجام شد.
3.1. انتخاب ویژگی
در این پژوهش، تحلیل مؤلفه های اصلی (PCA) با هدف درک متغیرها و ارتباط بین آنها انجام شد. رایانههای شخصی نمایش سادهتری از دادهها هستند و اغلب میتوانند ویژگیهای اساسی در دادهها را شناسایی کنند، که به فرآیند مهندسی ویژگی کمک میکند [ 76 ]. از آنجایی که متغیرها واحدها و مقیاس یکسانی ندارند، ابتدا همه متغیرها استاندارد شدند، یعنی حول محور 0 قرار گرفتند و برای دستیابی به انحراف استاندارد 1 مقیاس شدند تا قابل مقایسه باشند.
PCA منجر به 26 مؤلفه اصلی شد که 100٪ از تنوع در داده ها را توصیف می کند. اولین مؤلفه اصلی حدود 25 درصد از تنوع در مجموعه داده را در بر می گیرد. مؤلفه دوم و سوم به ترتیب 15 درصد و 10 درصد را در بر می گیرند و 16 مؤلفه اصلی اول برای پوشش 95 درصد از تنوع در داده ها کافی است. مؤلفه اول به طور قابل توجهی تحت تأثیر متغیرهای آب و هوایی مانند باران، باد و دما است و مؤلفه دوم عمدتاً تحت تأثیر مشتقات DEM مانند شیب، TRI و زبری است.
همانطور که در شکل 4 مشاهده می شود، بارگذاری ها با PC1 به عنوان محور x و PC2 به عنوان محور y ترسیم می شوند . نمودار بارگذاری نشان میدهد که هر متغیر چقدر بر مؤلفه اصلی تأثیر میگذارد، جایی که زاویه بین بردارها همبستگی بین متغیرها را نشان میدهد، جایی که زاویه کوچک نشاندهنده همبستگی مثبت بالا و زاویه 180 نشاندهنده همبستگی منفی است. بر اساس نمودار، به وضوح قابل مشاهده است که متغیرهای آب و هوایی مربوط به باران – rain_max14_day_ref، rain_average_ref، rain_5_year_ref، rain_50_year_ref-همبستگی شدیدی دارند. علاوه بر این، شیب_درجه، زبری، و TRI یک همبستگی مثبت قوی را بیان می کنند.
برای بررسی بیشتر داده ها برای متغیرهای همبسته به منظور جلوگیری از اطلاعات اضافی، یک ماتریس همبستگی محاسبه شد، همانطور که در شکل 5 مشاهده می شود .
قابل توجه است که متغیرهای زیر در مورد باران -rain_max14_day_ref، rain_average_ref، rain_5_year_ref، rain_50_year_ref-همبستگی قوی دارند، با ضرایب همبستگی بین 0.86 تا 1. TRI، با مقادیر بین 0.99 و 1، که مشاهدات انجام شده از PCA را پشتیبانی می کند. متغیرهای همبسته قوی باید حذف شوند تا از متغیرهای اضافی که ممکن است منجر به پیچیدگی ناخواسته در مدل ها شود و عملکرد آنها را کاهش دهد، اجتناب شود [ 76 ]. بر این اساس، متغیرهای زیر بیش از آستانه همبستگی زوجی 0.75 ± از داده ها حذف شدند، زیرا به طور قابل ملاحظه ای همبستگی در نظر گرفته شد:
-
درجه شیب؛
-
خشونت؛
-
Planform_Curvature;
-
پروفایل_انحنا;
-
میانگین_باد_ref;
-
rain_max_14day_ref;
-
باران_5_سال_رف;
-
rain_50_year_ref.
برای تعیین اهمیت متغیرها، از مدل جنگل تصادفی استفاده شد، زیرا نسبتاً ساده است و تابع اهمیت ویژگی دارد [ 77 ]. با توجه به اهمیت ویژگی RF، که در شکل 6 مشاهده می شود ، اشاره می شود که distance_quarry برای مدل اهمیتی ندارد، در حالی که distance_railroad و distance_road تاثیر جزئی بر مدل دارند. بر این اساس، برای مدل پیشبینی بیاهمیت تلقی شدند و حذف شدند. متغیرهایی که بیشترین اهمیت را داشتند عبارتند از TRI، انحراف معیار شیب، فاصله از ساحل، ارتفاع، TWI و SPI که عمدتاً مشتقات DEM هستند.
پس از بررسی ماتریس همبستگی و نمودار اهمیت ویژگی، مجموعه های پیش بینی کننده نهایی انتخاب شدند که در جدول 4 قابل مشاهده است.
3.2. مدل سازی حساسیت زمین لغزش: راه اندازی و تنظیم
3.2.1. جنگل تصادفی
مدل جنگل تصادفی یک طبقهبندی کننده گروه یادگیری نظارت شده است که شامل بیش از یک درخت تصمیم برای ایجاد یک “جنگل تصمیم” است. هر یک از درختان تصمیم گیری فردی به آنچه که نتیجه را فکر می کنند رأی می دهند و نتیجه جنگل تصادفی نتیجه با اکثریت آرا است [ 78 ]. زمان جمعی برای آموزش RF کمتر از سایر روش های طبقه بندی نظارت شده است، که آن را به یک انتخاب مناسب تبدیل می کند. RF در این مطالعه انتخاب شد، زیرا نشان داده شده است که عملکرد پیشبینیکننده آن یکی از امیدوارکنندهترین نقشهبرداری حساسیت زمین لغزش است [ 48 ، 61 ].
3.2.2. ماشین بردار پشتیبانی
SVM یک الگوریتم به خوبی تثبیت شده در یادگیری ماشین است و در عمل در بسیاری از برنامه ها به خوبی کار می کند. SVM یک تکنیک یادگیری نظارت شده است که از داده های آموزشی یاد می گیرد و سعی می کند داده ها را با جداسازی داده ها بر اساس ابرصفحه ها پیش بینی و تعمیم دهد که داده ها را به دسته ها تقسیم می کند. ابر صفحه یافت شده توسط SVM به گونه ای تخمین زده می شود که فاصله (حاشیه) تا نزدیکترین داده های آموزشی در هر دو طرف هایپرپلین به حداکثر برسد [ 76 ]. SVM انتخاب شد زیرا ترفندهای هسته آن یک راه حل منحصر به فرد برای مسائل پیچیده ارائه می دهد، اگرچه انتخاب پارامتر می تواند از نظر محاسبات فشرده باشد [ 62 ].
3.2.3. رگرسیون لجستیک
رگرسیون لجستیک یک الگوریتم طبقهبندی است که معمولاً زمانی استفاده میشود که دادههای مورد نظر باینری هستند، به این معنی که آنها به یک کلاس یا کلاس دیگر تعلق دارند. رگرسیون لجستیک در تئوری یک رگرسیون خطی است. با این حال، از یک تابع هزینه پیچیدهتر استفاده میکند که به عنوان «تابع سیگموئید/تابع لجستیک» تعریف شده است. LR به عنوان یکی از پرکاربردترین الگوریتمها در مدلسازی حساسیت زمین لغزش در مقیاس منطقهای در نظر گرفته میشود [ 62 ، 79 ].
ساخت مدلهای ML با استفاده از یک کتابخانه منبع باز پایتون، Scikit-Learn [ 80 ] انجام شد. داده های مورد استفاده برای مدل ها به منظور ارزیابی بی طرفانه از عملکرد مدل ها به زیر مجموعه های آموزشی و آزمایشی تقسیم شدند. دادههای آموزشی برای برازش و توسعه مدلها و دادههای آزمون برای اعتبارسنجی و آزمایش مدل آموزشدیده استفاده شد. هیچ دستورالعمل یکسانی برای نحوه تقسیم داده ها وجود ندارد [ 81]. در این مطالعه، مجموعه داده ها به یک زیرمجموعه آموزشی شامل 70 درصد داده ها و یک زیر مجموعه آزمایشی 30 درصد تقسیم شد. تقسیم پس از کلاس ها به منظور دستیابی به مقدار متعادلی از نمونه های زمین لغزش و غیر لغزش در هر دو مجموعه آموزشی و آزمایشی طبقه بندی شد. حالت تصادفی برای اطمینان از تکرارپذیری مدل ها تنظیم شد.
3.3. تنظیم Hyperparameter و K-Fold Validation
تنظیم فراپارامترها در این مطالعه با استفاده از Grid Search انجام شد. با جستجوی گرید، یک فراپارامتر کاندید یا مجموعه ای از فراپارامترهای کاندید انتخاب می شود و مدل هایی برای هر ترکیب ممکن از مقادیر انتخاب شده ساخته می شوند. اعتبارسنجی متقابل ده برابری برای ارزیابی هر ترکیب مقدار پارامتر متمایز، برای تجزیه و تحلیل عملکرد هر نامزد مورد استفاده قرار گرفت. معمولاً در یادگیری ماشینی از K-value 5 یا 10 استفاده می شود، اما هیچ قانون رسمی مبنی بر اینکه چقدر باید باشد وجود ندارد. البته شایان ذکر است که k بالاتر از نظر محاسباتی سنگین تر است [ 76 ].
هنگامی که نتایج اعتبار دهی 10 برابر محاسبه شد، بهینه ترین ترکیب فراپارامتر برای مدل نهایی انتخاب شد تا بر اساس بهترین نتایج تجربی با داده های آموزشی مطابقت داشته باشد [ 81 ]. فراپارامترهای حاصل از جستجوی گرید و مورد استفاده در این مطالعه در جدول 5 آمده است.
تعداد تخمینگرها در RF تعیین میکند که هر طبقهبندی باید چند «رای» را برای تصمیمگیری نهایی تکمیل کند، در حالی که max_features تعداد ویژگیهایی است که بهطور تصادفی در تقسیم گره انتخاب شدهاند. چهار تابع هسته متداول در SVM عبارتند از: “خطی”، “چند جمله ای”، “تابع پایه شعاعی” و “سیگموئید”، که تابع پایه شعاعی (RBF) برای هر دو مجموعه پیش بینی انتخاب شد، که نشان دهنده غیرخطی بودن مجموعه داده ها این تابع به دو پارامتر Gamma و penalty (C) نیاز دارد. گاما یک ضریب هسته است که تأثیر یک نمونه را مشخص می کند، جایی که مقادیر گامای بزرگتر به این معنی است که تأثیر آن نقطه داده به دور گسترش نمی یابد. جریمه (C) تمایل به اجتناب از طبقه بندی اشتباه را تعریف می کند. یک جریمه بزرگ، SVM را مجبور میکند که یک ابر صفحه با حاشیه باریکتر را انتخاب کند. اگر این هایپرپلین به طبقه بندی صحیح نقاط بیشتر کمک کند. در مقابل، یک جریمه کوچکتر باعث می شود SVM یک هایپرپلن با حاشیه وسیع تر را ترجیح دهد، حتی اگر به این معنی باشد که امتیازهای بیشتری را اشتباه برچسب گذاری می کند. هایپرپارامتر حلال برای LR تعیین می کند که از کدام الگوریتم استفاده شود. حلکنندهای که برای هر دو مجموعه پیشبینیکننده استفاده میشود، “liblinear” است که با مجموعه دادههای کوچکتر کارآمد است. هنجار مورد استفاده برای جریمه کردن، l1 است که ممکن است اندازه ضرایب را محدود کند، در حالی که C، مشابه SVM، یک فراپارامتر منظم سازی است. که با مجموعه داده های کوچکتر کارآمد است. هنجار مورد استفاده برای جریمه کردن، l1 است که ممکن است اندازه ضرایب را محدود کند، در حالی که C، مشابه SVM، یک فراپارامتر منظم سازی است. که با مجموعه داده های کوچکتر کارآمد است. هنجار مورد استفاده برای جریمه کردن، l1 است که ممکن است اندازه ضرایب را محدود کند، در حالی که C، مشابه SVM، یک فراپارامتر منظم سازی است.
3.4. ارزیابی دقت
پس از انجام یک کار طبقه بندی، ارزیابی دقت نتایج برای اطمینان از کیفیت طبقه بندی و ارزیابی عملکرد آن انجام شد. یکی از روشهای انجام ارزیابیهای دقت مورد استفاده در این مطالعه، تولید یک ماتریس سردرگمی به منظور مقایسه حقیقت پایه با نتایج طبقهبندی است [ 82 ].]. در مورد مطالعه، منفی کاذب (FN) به این معنی است که یک مدل در تشخیص زمین لغزش واقعی شکست خورده است، در حالی که مثبت کاذب (FP) نشان می دهد که یک غیر زمین لغزش به اشتباه توسط مدل برچسب زمین لغزش شده است. FN ها به عنوان “بدترین سناریو” در نظر گرفته می شوند، زیرا برخی از مناطق احتمالی مستعد زمین لغزش تحت نظارت قرار می گیرند و به عنوان “ایمن” در نقشه حساسیت نشان داده می شوند. این توجه زمانی که ارزیابی مدل انجام می شود در نظر گرفته می شود. از ماتریس های سردرگمی، تعدادی از معیارهای توصیفی طبقه بندی مانند دقت کلی و کاپا کوهن محاسبه می شود. دقت کلی نسبت تمام نمونه های مرجع را نشان می دهد که به درستی طبقه بندی شده اند [ 82 ]:
��ه�آللآججتو�آج�=تی�توهپ�سمنتیمن�هس+تی�توهنه�آتیمن�هستی�تیآلاسآمترپله
آماره کاپا کوهن اندازه گیری میزان درصد مقادیر صحیح در یک ماتریس خطا به دلیل توافق «درست» یا توافق «شانس» است، زیرا حتی یک انتساب کاملا تصادفی از کلاس ها درصدی از مقادیر درست را تولید می کند [ 82 ]. ]:
کآپپآ=�آ–سیآ1–سیآ
که در آن OA دقت کلی مدل و CA توافق شانس است.
منحنی ROC عملکرد مسائل طبقه بندی را در تنظیمات آستانه های مختلف اندازه گیری می کند. ROC یک منحنی احتمال برای مسائل طبقه بندی باینری است و AUC نشان می دهد که چگونه یک مدل می تواند بین کلاس ها تمایز قائل شود. هرچه مقدار AUC بالاتر باشد، مدل در پیشبینی کلاسهای صحیح بهتر است [ 83]. در این مطالعه از ROC و AUC برای مقایسه عملکرد الگوریتمهای طبقهبندی استفاده شد. منحنی ROC با نرخ مثبت واقعی (TPR) در برابر نرخ مثبت کاذب (FPR) رسم می شود، که در آن TPR روی محور x و FPR روی محور y است. TPR که حساسیت نیز نامیده می شود، مربوط به نسبت نمونه های مثبت است که به درستی به عنوان مثبت (مثبت واقعی) در رابطه با همه مثبت های واقعی (مثبت واقعی و منفی کاذب) طبقه بندی می شوند [ 83 ]:
اسه�سمنتیمن�منتی�=تی�توهپ�سمنتیمن�هتی�توهپ�سمنتیمن�ه+افآلسهنه�آتیمن�ه
نرخ منفی واقعی (TNR) یا ویژگی، توانایی طبقه بندی کننده برای طبقه بندی صحیح نمونه های منفی به عنوان منفی است. بر خلاف حساسیت، ویژگی مربوط به نسبت نمونه های منفی است که به درستی به عنوان منفی طبقه بندی شده اند در رابطه با همه منفی های واقعی (منفی های واقعی و مثبت های کاذب) [ 83 ]:
اسپهجمن�منجمنتی�=تی�توهنه�آتیمن�هتی�توهنه�آتیمن�ه+افآلسهپ�سمنتیمن�ه
FPR مورد استفاده برای رسم منحنی ROC توسط:
افپآر=1–اسپهجمن�منجمنتی�
3.5. اعتبار سنجی خارجی
هنگام انتخاب فراپارامترهای مدل، این خطر وجود دارد که یک مدل با یادگیری بیش از حد رابطه بین متغیرهای توضیحی و کلاسها در دادههای آموزشی بیش از حد برازش کند. این باعث ایجاد مشکل می شود، زیرا تفسیر بیش از حد الگوها در مجموعه آموزشی به این معنی است که قدرت پیش بینی مدل در مواجهه با داده های جدید کاهش می یابد [ 81 ]. برای جلوگیری از آن، مدل با فراپارامترهای تنظیم شده روی یک مجموعه داده خارجی اعتبارسنجی میشود که در آموزش مدل و تنظیم فراپارامترها استفاده نشده است. یک مجموعه داده از خارج از AOI برای این منظور استفاده می شود. منطقه اعتبار سنجی خارجی در بخش جنوبی دانمارک، از هادرسلف تا مرز دانمارک و آلمان از جمله جزیره Als واقع شده است. شکل 7 را ببینید. این منطقه بر اساس داده های موجود زمین لغزش ارائه شده توسط GEUS و به دلیل غلظت بالای زمین لغزش ها در منطقه انتخاب شد. برای نمونه های زمین لغزش و غیر لغزش در منطقه اعتبار سنجی خارجی، استراتژی نمونه گیری مرکز، همانطور که قبلا توضیح داده شد، استفاده شد که منجر به 260 زمین لغزش و 268 نقطه غیر لغزش شد.
4. نتایج
معیارهای دقت برای هر دو مجموعه پیش بینی در جدول 6 نشان داده شده است. برای مجموعه پیش بینی I، دقت کلی برای سه الگوریتم تقریباً برابر با 0.91 و 0.92 بود. مقدار کاپا SVM کمی بالاتر از مقادیر RF و LR بود، اگرچه هر سه مدل دارای مقدار کاپا بالای 0.82 هستند که نشاندهنده تطابق تقریباً کامل است، به این معنی که شانس دلیلی برای دقت بالا نیست. حساسیت سه مدل با مجموعه پیشبینیکننده I عموماً با مقادیر به همان اندازه بالا نشان داده میشود و مقادیر ویژگی از 0.88 تا 0.92 متغیر است. دقت کلی اعتبارسنجی در ناحیه خارجی نشان میدهد که مدلهای SVM و LR به خوبی روی دادههای دیده نشده تعمیم نمییابند. این به توزیع فضایی متفاوت طبقات توپوگرافی پیش کواترنر نسبت داده می شود. کلاسهای 8 و 9 در ناحیه اعتبارسنجی خارجی نشان داده نمیشوند، در حالی که حضور کلاس 7 محدود است. در مقایسه با AOI. کلاس های 5 و 6 با اضافه وزن نقاط زمین لغزش در AOI مشخص می شوند، در حالی که این کلاس ها در منطقه اعتبار سنجی خارجی عمدتاً شامل نمونه های غیر لغزشی هستند. نتیجه بر استحکام الگوریتم RF برای مدیریت دادههای ناشناخته و گمشده تأکید میکند.
برای Predictor Set II، دقت کلی، کاپا، ویژگی و حساسیت برای مدلها با مقادیر تقریباً مساوی نشان داده میشود. فقط یک تفاوت حاشیهای بین مجموعههای پیشبینیکننده I و II مشاهده میشود که نشان میدهد متغیرهای آب و هوا به جدایی کلاس کمک میکنند. علاوه بر این، با نگاهی به منحنی های ROC-AUC که در شکل 8 و شکل 9 مشاهده می شود، قابل توجه است که مقادیر مدل ها برای مدل های هر دو مجموعه پیش بینی یکسان هستند. علاوه بر این، در هر دو مجموعه پیش بینی، منحنی ها بالاتر از “خط حدس تصادفی” هستند، که نشان می دهد که مدل ها به خوبی بین کلاس های مثبت و منفی تمایز قائل می شوند. منحنی های رسم شده نشان می دهد که مدل RF در طبقه بندی صحیح نقاط کار کمی بهتر انجام می دهد.
نقشه های حساسیت
نقشه های حساسیت با استفاده از کلاس های فاصله مساوی برای همه نقشه های تولید شده [ 84 ] تجسم می شوند. این روش تجسم با کلاس های مساوی، نقشه ها را قابل مقایسه می کند. فواصل صدک استفاده شده در <50٪، 50-75٪، 75-90٪، 90-95٪ و > 95٪ طبقه بندی می شوند، همانطور که در [ 62 ] پیشنهاد شده است.
نقشه های حساسیت برای سه مدل، با مجموعه پیش بینی کننده I، در شکل 10 و با مجموعه پیش بینی کننده II در شکل 11 دیده می شوند . نقشههای حساسیت بدون متغیرهای اقلیمی احتمال زیاد و بسیار زیاد زمین لغزش در امتداد ساحل را نشان میدهند و هر سه مدل نشاندهنده خطری در ناحیه شمال غربی AOI هستند. به طور کلی، مدل ها در مورد اینکه کدام مناطق مستعد زمین لغزش هستند توافق دارند. با این حال، آنها در مقادیر احتمال تخصیص داده شده متفاوت هستند، جایی که SVM و LR کل منطقه بزرگ تری را در کلاس های فاصله ای “بالا” و “بسیار زیاد” طبقه بندی می کنند. شایان ذکر است که SVM یک مدل احتمالی نیست که در آن نتایج مدل باید به احتمالات تبدیل شود، بنابراین خروجی احتمال باید با احتیاط تفسیر شود.
نقشههای حساسیت با متغیرهای اقلیمی معمولاً از همان گرایشهایی پیروی میکنند که نقشههای بدون دادههای اقلیمی. این سه مدل به طور کلی در مورد مکان مناطق خطر توافق دارند. یک تفاوت قابل توجه مدل SVM است که در هنگام استفاده از Predictor Set II در مقایسه با Predictor Set یک منطقه کل بزرگتر را در معرض خطر بالا و بسیار بالا طبقه بندی می کند.
مدل RF تنها مدلی است که نتایج معنی داری با متغیرهای اقلیمی آینده ایجاد کرد. نقشه، که در شکل 12 مشاهده می شود ، بر اساس سناریوی RCP8.5 در سال های 2071-2100 است، و متغیرهای زیر با توجه به این پیش بینی آب و هوا تغییر کردند:
-
فاصله_ساحل;
-
آب های زیرزمینی؛
-
انفجار ابر
-
باران_حداکثر_روز;
-
میانگین_باران;
-
میانگین_دمای
نقشه آینده به طور کلی کاهش حساسیت به زمین لغزش ها را بدون هیچ گونه مناطق پرخطر یا بسیار پرخطر نشان می دهد. بر اساس این نقشه، تغییر اقلیم تأثیر فزاینده ای بر وقوع زمین لغزش نخواهد داشت. با این حال، بعید به نظر می رسد که تغییر اقلیم تأثیر مثبتی بر وقوع زمین لغزش داشته باشد، به این معنی که استفاده از متغیرهای اقلیمی در مدل ها مورد تردید است. توضیح احتمالی برای این است که زمین لغزش ها توسط رویدادهای شدید منفرد ایجاد می شوند که در متغیرهای آب و هوایی تعمیم یافته با وضوح 1 کیلومتر بیان نمی شوند. از آنجایی که فهرست زمین لغزش مورد استفاده در پروژه حاوی مهر زمانی نیست، امکان اتصال زمین لغزش ها به برخی رویدادهای آب و هوایی و استفاده از پیش بینی کننده های وابسته به زمان وجود نداشت.
5. بحث
مطالعه ما عملکرد پیشبینیکننده بالایی با تمایز کمی در سه تکنیک اعمالشده برای AOI در زمینهای کم ارتفاع و نسبتاً هموار دانمارک-LR، RF، و SVM نشان داد. ظرفیت پیشبینی نشاندادهشده LR در دادههای آزمون از نظر دقت کلی، ویژگی، حساسیت و مقادیر AUC بالاتر از گزارش قبلی توسط [ 50 ، 85 ] و مطابق با یافتههای [ 86 ] بود. نتایج معیارهای دقت طبقهبندیکننده RF از نتایج بهدستآمده در [ 54 ] برتر بود، اما مطابق با [ 54 ] با مقادیر AUC کمی بالاتر بود. دقت به دست آمده توسط SVM بالاتر از مطالعات قبلی بود [ 48 ، 87 ،88 ]. اعتبارسنجی روی مجموعه داده خارجی، دقت کلی RF را 94-96٪ نشان داد، در حالی که SVM و LR عملکرد پایینتری از خود نشان دادند. اعتبار سنجی خارجی به طور کلی نشان می دهد که RF برای مقوله های جدید در داده ها قوی است، می تواند داده های ناشناخته را تعمیم دهد و قابلیت انتقال را دارد. بر اساس این واقعیت و بر اساس معیارهای دقت مانند دقت کلی، کاپا و حساسیت، مدل توصیه شده برای کار طبقه بندی در این مطالعه RF است. با این حال، از آنجایی که کار حاضر بر مدلهای پایه ML متمرکز است، یک بسط معنیدار برای آن کالیبراسیون الگوریتمهای پیشرفتهتر، استفاده از تکنیکهای مدلسازی ترکیبی [ 56 ، 57 ، 89 ] و تکنیکهای پیچیدهتر انتخاب ویژگی [ 90 ] خواهد بود.].
با گنجاندن متغیرهای اقلیمی در این مطالعه، تلاش شد تا تأثیر سناریوی اقلیمی آینده بر حساسیت زمین لغزش پیشبینی شود. نقشه حاصل، بر اساس داده های اقلیمی آینده از RCP8.5 برای سال های 2071-2100، نشان داد که تغییرات آب و هوایی مناطق مستعد لغزش را کاهش می دهد. نتایج با پیشبینیهای قبلی حساسیت آینده برای سناریوهای RCP با تمایل به کاهش حساسیت برای برخی از مدلهای آب و هوایی منطقهای [ 22 ] موافق است. علاوه بر این، لغزشها میتوانند توسط رویدادهای شدید منفرد ایجاد شوند که دادههای مرجع موجود قادر به ثبت آن نیستند. از آنجایی که فهرست زمین لغزش استفاده شده دارای مهر زمانی نیست، نمی توان زمین لغزش ها را به رویدادهای آب و هوایی خاص مرتبط کرد و از پیش بینی کننده های وابسته به زمان استفاده کرد [ 48 ]]. بنابراین، جهت آینده کار فعلی باید بر روی استفاده از داده های آب و هوایی مرجع مختلف و مدل های مختلف آب و هوایی متمرکز باشد.
طبق تجزیه و تحلیل حساسیت نتایج، یافتههای ما به انتخاب عوامل ورودی، انتخاب الگوریتمهای یادگیری ماشین، تنظیمات فراپارامتر آنها و کیفیت سایتهای آموزشی ما حساس بود. با این وجود، رویکرد روشمند، ادغام متغیرهای تغییر اقلیم، و همچنین انتخاب عوامل تأثیرگذار در اولین نقشهبرداری حساسیت زمین لغزش در دانمارک سهم عمده این مطالعه را تشکیل میدهند.
6. نتیجه گیری
در کار حاضر، مدلسازی پیشبینی با استفاده از سه مدل رایج ML برای تولید اولین نقشههای حساسیت زمین لغزش در یک AOI در دانمارک انجام شد. استفاده از سه الگوریتم ML نتایج امیدوارکنندهای را برای نقشهبرداری حساسیت زمین لغزش در دانمارک نشان داد. سه طبقهبندی کننده (RF، SVM و LR) که در این مطالعه آموزش دیدند و سپس بر روی دادههای آزمون آزمایش شدند، دقت کلی بالای 91-92٪ را نشان دادند. هر سه مدل دارای مقادیر کاپا بالای 0.82 برای هر دو مجموعه پیش بینی کننده بودند، که نشان می دهد طبقه بندی توسط یک فرآیند تصادفی ایجاد نشده است. در این مطالعه، حساسیت به عنوان یک متریک دقت مهم وزن داده شد، زیرا اندازهگیری نسبت زمین لغزشهای طبقهبندی صحیح است. حساسیت برای سه مدل بالای 92 درصد بود.
مدل RF امکان تجزیه و تحلیل اهمیت متغیر را فراهم میکند، جایی که مشخص شد که مهمترین متغیرهای مربوط به زمین لغزشها، پارامترهای مشتقشده از DEM مانند ارتفاع، TRI، و انحراف استاندارد یک شیب و همچنین فاصله از ساحل هستند. بازرسی بصری نقشه های حساسیت نیز نشان دهنده تأثیر زیاد این متغیرها بر نتیجه نهایی است. کماهمیتترین متغیرها، فواصل از جادهها، راهآهنها و معادن معدن بودند. اهمیت متغیر باید در چارچوب مطالعه موردی داده شده ارزیابی شود و لزوماً قابل تعمیم به سایر مناظر نیست زیرا فعالیت های انسانی، چشم انداز، و ویژگی های زمین شناسی در سراسر جهان یکسان نیستند. عوامل موثر برگرفته از DEM مورد استفاده در این مطالعه ممکن است ردپای زمین لغزش های گذشته را افزایش دهد. در حالی که مناطق مستعد زمین لغزش، که هنوز تحت تاثیر زمین لغزش قرار نگرفته اند، ممکن است چنین بیان مورفولوژیکی مشخصی را نشان ندهند. بنابراین، نقشهبرداری حساسیت زمین لغزش ممکن است نیاز به در نظر گرفتن چگونگی ظاهر زمین قبل از تغییر آن توسط زمین لغزش داشته باشد.
در زمان مطالعه، هیچ برنامه ریزی برای زمین لغزش در دانمارک وجود ندارد، زیرا آگاهی کمی از این مشکل وجود دارد. نقشه های حساسیت ایجاد شده در این مطالعه می تواند برای ارتباط و برجسته کردن خطر زمین لغزش برای تصمیم گیرندگان استفاده شود و به طور بالقوه می تواند زمینه را برای قانون گذاری و برنامه ریزی برای این نوع خطر در دانمارک ایجاد کند. پیادهسازی احتمالی مدلها و محصولات حاصل در دیدگاه برنامهریزی دانمارکی اول از همه نیاز به تأیید اعتبار توسط متخصصان در زمینه زمین لغزش دارد، زیرا اجرای بالقوه میتواند پیامدهای قانونی داشته باشد. به خصوص متغیرهای انتخاب شده برای مدل ها باید بررسی و تجزیه و تحلیل شوند تا اطمینان حاصل شود که فقط متغیرهای مرتبط گنجانده شده اند. در این مرحله، مدلها فقط در منطقه کوچکتری مورد علاقه در دانمارک آزمایش شدهاند. به این معنی که فقط در سطح منطقه ای قابل اجراست. اگر قرار بود برنامه ریزی زمین لغزش در مقیاس ملی انجام شود، باید مدل ها را گسترش داد.
مشارکت های نویسنده
مفهوم سازی، آنجلینا آگینکو، لرک کریستینا هانسن، کوین لاندهولم لینگ، لارس بودوم و جمال جوکار ارسنجانی. نرم افزار، Angelina Ageenko; نوشتن-پیش نویس اصلی، آنجلینا آجینکو، لرک کریستینا هانسن و کوین لاندهولم لینگ. نگارش-بررسی و ویرایش، آنجلینا آگینکو، لارس بودوم و جمال جوکار ارسنجانی; سرپرستی، لارس بودوم و جمال جوکار ارسنجانی. همه نویسندگان نسخه منتشر شده نسخه خطی را خوانده و با آن موافقت کرده اند.
منابع مالی
این تحقیق هیچ بودجه خارجی دریافت نکرد.
بیانیه هیئت بررسی نهادی
قابل اجرا نیست.
بیانیه رضایت آگاهانه
قابل اجرا نیست.
بیانیه در دسترس بودن داده ها
دادهها، کد و نقشههای متغیرهای مورد استفاده که از نتایج گزارششده پشتیبانی میکنند در مخزن آنلاین https://github.com/angelinkatula/Landslide-susceptibility-mapping (در 17 آوریل 2022) موجود است. فهرست ملی زمین لغزش به صورت عمومی از https://doi.org/10.6084/m9.figshare.16965439.v1 در دسترس است (در 20 دسامبر 2021 قابل دسترسی است). مجموعه دادههای DEM، وکتور با نهرها، خط ساحلی، جادهها، راهآهنها، معادن معدن، و همچنین عمق آبهای زیرزمینی برای دانلود رایگان از https://dataforsyningen.dk/data (در 5 ژانویه 2022) در دسترس هستند. داده های زمین شناسی را می توان به صورت رایگان از https://frisbee.geus.dk/geuswebshop/ دانلود کرد.(دسترسی در 5 ژانویه 2022) پس از ثبت نام کاربر یا از طریق یک پورتال وب GIS https://data.geus.dk/geusmap/ قابل مشاهده است (در 18 ژانویه 2022 قابل مشاهده است). داده های آب و هوا، v2020b، در https://www.dmi.dk/klima-atlas/data-og-rapporter-klimaatlas/ (در 10 ژانویه 2022 قابل دسترسی است) در قالب فایل های NetCDF موجود است.
قدردانی
مایلیم از Kristian Svennevig از سازمان زمینشناسی دانمارک و گرینلند و Gregor Lützenburg از گروه علوم زمین و مدیریت منابع طبیعی دانشگاه کپنهاگ برای وقت گذاشتن، دانش تخصصی و ارائه زیرمجموعه فهرست زمین لغزش تشکر کنیم. همچنین توصیه های ادبیات و بازخورد ارزشمند.
تضاد علاقه
نویسندگان هیچ تضاد منافع را اعلام نمی کنند.
منابع
- هایلند، LM؛ Bobrowsky, P. The Landslide Handbook—A Guide to Understanding Landslides , 1st ed.; بخشنامه بررسی زمین شناسی ایالات متحده 1325: Reston، VA، ایالات متحده آمریکا، 2008. [ Google Scholar ]
- Wallemacq، P. هاوس، آر. زیان های اقتصادی، فقر و بلایا 1998–2017 ; مرکز تحقیقات اپیدمیولوژی بلایا، دفتر سازمان ملل متحد برای کاهش خطر بلایا: ژنو، سوئیس، 2018. [ Google Scholar ]
- Svennevig، K. لوتزنبورگ، جی. کیدینگ، MK; Pedersen، SAS نقشهبرداری مقدماتی زمین لغزش در دانمارک نشاندهنده خطر زمین لغزش دستکمگرفته است. گاو نر GEUS. 2020 ، 44 . [ Google Scholar ] [ CrossRef ]
- هررا، جی. متئوس، آر.ام. گارسیا داوالیلو، جی سی. گراندژان، جی. پویاجی، ای. مفتی، ر. Filipciuc، TC; Jemec Auflič، M.; جژ، ج. Podolszki، L. پایگاههای اطلاعاتی زمین لغزش در سازمان زمینشناسی اروپا. زمین لغزش 2017 ، 15 ، 359-379. [ Google Scholar ] [ CrossRef ]
- مدل ارتفاع دانمارک — زمین. در دسترس آنلاین: https://dataforsyningen.dk/data/930 (دسترسی در 10 مه 2022).
- لوتزنبورگ، جی. Svennevig، K. بیورک، AA; کیدینگ، ام. Kroon، A. فهرست ملی زمین لغزش دانمارک. سیستم زمین علمی بحث داده ها 2021 ، 1-13 . در دست بررسی . [ Google Scholar ]
- فیلد، CB; باروس، وی. Stocker، TF; کین، دی. داکن، دی جی؛ Ebi، KL; Mastrandrea، MD مدیریت خطرات رویدادهای شدید و بلایا برای پیشبرد سازگاری با تغییرات اقلیمی ؛ IPCC: ژنو، سوئیس؛ انتشارات دانشگاه کمبریج: کمبریج، بریتانیا، 2012. [ Google Scholar ]
- Crozier، MJ رمزگشایی اثر تغییر آب و هوا بر فعالیت زمین لغزش: یک بررسی. ژئومورفولوژی 2010 ، 124 ، 260-267. [ Google Scholar ] [ CrossRef ]
- گلید، تی. Crozier, MJ ماهیت تأثیر خطر زمین لغزش. در خطر زمین لغزش و خطر ; جان وایلی و پسران: هوبوکن، نیوجرسی، ایالات متحده آمریکا، 2005; صص 43-74. [ Google Scholar ]
- دوربین، CAS؛ باجنی، گ. کورنو، آی. رافا، م. استیونازی، اس. آپوانی، تی. معرفی متغیرهای بارش شدید و ذوب برف برای اجرای تحلیل حساسیت زمین لغزش کم عمق غیر ثابت مرتبط با فرآیند. علمی کل محیط. 2021 ، 786 ، 147360. [ Google Scholar ] [ CrossRef ]
- دیکشیت، ا. سرکار، ر. پرادان، بی. راتیرانجان، ج. داوچو، دی. Alamri، A. ارزیابی احتمال و استفاده از آن در نقشهبرداری حساسیت زمین لغزش برای بوتان شرقی. Water 2020 , 12 , 267. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- لین، کیو. لیما، پ. استگر، اس. گلید، تی. جیانگ، تی. ژانگ، جی. لیو، تی. Wang، Y. نقشهبرداری حساسیت زمین لغزش ناشی از بارندگی مبتنی بر داده در مقیاس ملی برای چین با حسابداری برای دادههای ناقص زمین لغزش. Geosci. جلو. 2021 ، 12 ، 267. [ Google Scholar ] [ CrossRef ]
- روی، جی. ساها، S. نقشهبرداری حساسیت زمین لغزش با استفاده از مدلهای آماری مبتنی بر دانش در منطقه دارجلینگ، بنگال غربی، هند. Geoenviron. بلایا 2019 ، 6 ، 1-18. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- Malka, A. نقشهبرداری حساسیت زمین لغزش Gdynia با استفاده از مدلهای آماری مبتنی بر سیستم اطلاعات جغرافیایی. Nat Hazards 2021 ، 107 ، 639-674. [ Google Scholar ] [ CrossRef ]
- Wu, C. حساسیت زمین لغزش بر اساس فهرست زمین لغزش ناشی از بارندگی شدید و تکامل زمین لغزش زیر. Water 2019 ، 11 ، 2609. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- نام، ک. Wang، F. ارزیابی حساسیت زمین لغزش ناشی از بارندگی شدید با استفاده از رمزگذار خودکار همراه با جنگل تصادفی در استان شیمان، ژاپن. Geoenviron. بلایا 2020 ، 7 ، 1-16. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- هوانگ، اف. ژانگ، جی. ژو، سی. وانگ، ی. هوانگ، جی. Zhu, L. یک الگوریتم یادگیری عمیق با استفاده از یک شبکه عصبی رمزگذار خودکار پراکنده کاملاً متصل برای پیشبینی حساسیت زمین لغزش. رانش زمین 2020 ، 17 ، 217-229 . [ Google Scholar ] [ CrossRef ]
- برناردی، اس. واندروم، آر. تیری، ی. هوئت، تی. گرمونت، ام. ماسون، اف. گراندژان، جی. Bouroullec، I. مدل سازی خطرات زمین لغزش تحت تغییرات جهانی: مورد یک دره پیرنه. نات سیستم خطرات زمین. علمی 2021 ، 21 ، 147-169. [ Google Scholar ] [ CrossRef ]
- کیم، اچ جی; لی، DK; پارک، سی. کیل، اس. پسر، ی. پارک، JH ارزیابی خطرات زمین لغزش با استفاده از سناریوهای RCP 4.5 و 8.5. محیط زیست علوم زمین 2015 ، 73 ، 1385-1400. [ Google Scholar ] [ CrossRef ]
- گسنر، سی. پروپر، سی. بگریا، اس. گلید، تی. تأثیر تغییر آب و هوا برای حساسیت زمین لغزش فضایی. در زمین شناسی مهندسی برای جامعه و قلمرو — جلد 1 ; Lollino, G., Manconi, A., Clague, J., Shan, W., Chiarle, M., Eds. Springer: Cham, Switzerland, 2015. [ Google Scholar ]
- شو، کی جی. یانگ، CM تجزیه و تحلیل پیش بینی حساسیت زمین لغزش تحت شرایط تغییر آب و هوا – مطالعه بر روی حوضه رودخانه چینگشوی تایوان. مهندس جئول 2015 ، 192 ، 46-62. [ Google Scholar ] [ CrossRef ]
- پارک، اس جی. Lee, DK پیش بینی حساسیت به زمین لغزش تحت تأثیر تغییرات آب و هوا در مناطق شهری کره جنوبی با استفاده از یادگیری ماشین. Geomat. نات خطرات خطرات 2021 ، 12 ، 2462-2476. [ Google Scholar ] [ CrossRef ]
- فام، QB; پال، SC; چاکرابورتی، آر. سها، ع. جانی زاده، س. احمدی، ک. خضر، ک.م. Anh، DT; Tiefenbacher، JP; بناری، الف. پیش بینی حساسیت زمین لغزش بر اساس مدل های یادگیری ماشین درخت تصمیم تحت تغییرات آب و هوا و کاربری زمین. Geocarto Int. 2021 ، 12 ، 1-27. [ Google Scholar ] [ CrossRef ]
- رایشنباخ، پ. روسیا، ام. ملامودب، ب.د. میهرب، م. Guzzetti، F. مروری بر مدل های حساسیت زمین لغزش مبتنی بر آماری. Earth-Sci. Rev. 2018 , 180 , 60-91. [ Google Scholar ] [ CrossRef ]
- گاریانو، اس ال. Guzzetti, F. رانش زمین در آب و هوای متغیر. Earth-Sci. Rev. 2016 , 162 , 227-252. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- لانگن، PL; بوبرگ، اف. پدرسن، RA; کریستنسن، OB; سورنسن، آ. مدسن، ام اس; اولسن، م. دارهولت، ام. کلیماتلاس-راپورت دانمارک ؛ DMI: کپنهاگ، دانمارک، 2020. [ Google Scholar ]
- فال، آر. کرومیناس، جی. بونارد، سی. کاسینی، ال. لروی، ای. راهنمای Savage، WZ برای حساسیت زمین لغزش، منطقه بندی خطر و خطر برای برنامه ریزی کاربری زمین. مهندس جئول 2008 ، 3 ، 85-98. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- گوزتی، اف. کارارا، ا. کاردینالی، م. رایچنباخ، ص. ارزیابی خطر زمین لغزش: مروری بر تکنیکهای فعلی و کاربرد آنها در یک مطالعه چند مقیاسی، ایتالیا مرکزی. زمین لغزش 1999 ، 31 ، 181-216. [ Google Scholar ] [ CrossRef ]
- دنده، HT; لیانگ، تی. شناخت و شناسایی. در تجزیه و تحلیل و کنترل زمین لغزش ; Schuster, RL, Krizek, RJ, Eds. گزارش ویژه 176; هیئت تحقیقات حمل و نقل واشنگتن، آکادمی ملی علوم: واشنگتن، دی سی، ایالات متحده آمریکا، 1996; صص 34-80. [ Google Scholar ]
- Cruden، DM; Varnes, DJ Landslides, Investigation and Mitigation ; Turner, AK, Schuster, RL, Eds., Eds.; گزارش ویژه 247; هیئت تحقیقات حمل و نقل: واشنگتن، دی سی، ایالات متحده آمریکا، 1996; صص 35-75. [ Google Scholar ]
- گوزتی، اف. کاردینالی، م. رایشنباخ، پ. Carrara، A. مقایسه نقشه های زمین لغزش: مطالعه موردی در حوضه رودخانه تیبر بالایی، ایتالیا مرکزی. محیط زیست مدیریت 2000 ، 25 ، 247-363. [ Google Scholar ] [ CrossRef ] [ PubMed ]
- فیوروچی، اف. کاردینالی، م. کارلا، آر. روسی، ام. موندینی، AC; سانتوری، ال. آردیزون، اف. Guzzetti, F. نقشه برداری فصلی زمین لغزش و برآورد نرخ بسیج زمین لغزش با استفاده از تصاویر هوایی و ماهواره ای. ژئومورفولوژی 2011 ، 129 ، 59-70. [ Google Scholar ] [ CrossRef ]
- گوزتی، اف. موندینی، AC; کاردینالی، م. فیوروچی، اف. سانتانجلو، ام. نقشههای موجودی چانگ، KT لغزش: ابزارهای جدید برای یک مشکل قدیمی. Earth-Sci. Rev. 2012 , 112 , 42-66. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- هاچینسون، JN مقاله کلیدی: ارزیابی خطر زمین لغزش. در زمین لغزش ; بل، دی اچ، اد. Balkema: روتردام، هلند، 1995; صفحات 1805-1841. [ Google Scholar ]
- کارارا، ا. کاردینالی، م. دتی، آر. گوزتی، اف. پاسکی، وی. تکنیکها و مدلهای آماری GIS در ارزیابی خطر زمینلغزش رایشنباخ، P. زمین گشت و گذار. روند. Landf. 1991 ، 16 ، 427-445. [ Google Scholar ] [ CrossRef ]
- فورلانی، س. نینفو، الف. آیا حال کلید آینده است؟ Earth-Sci. Rev. 2015 , 142 , 38-46. [ Google Scholar ] [ CrossRef ]
- کرومیناس، جی. ون وستن، سی جی; فراتینی، پ. کاسینی، ال. Malet، JP; فتوپولو، س. کاتانی، اف. ون دن ایکهات، ام. ماورولی، ا. آگلیاردی، اف. و همکاران توصیه هایی برای تحلیل کمی خطر زمین لغزش گاو نر مهندس جئول محیط زیست 2014 ، 73 ، 209-263. [ Google Scholar ] [ CrossRef ]
- شانو، ال. Raghuvanshi، TK; Meten، M. ارزیابی حساسیت زمین لغزش و تکنیک های پهنه بندی خطر – یک بررسی. Geoenviron. بلایا 2018 ، 7 ، 1-19. [ Google Scholar ] [ CrossRef ]
- تیری، ی. ماکوایر، او. Fressard, M. کاربرد قوانین خبره در رویکردهای غیرمستقیم برای ارزیابی حساسیت زمین لغزش. زمین لغزش 2014 ، 11 ، 411-424. [ Google Scholar ] [ CrossRef ]
- هانسن، ا. فرانک، CAM; کرک، پی. Brimicombe، AJ; Tung، F. کاربرد GIS برای ارزیابی خطر، با اشاره خاص به زمین لغزش در هنگ کنگ. در سیستم های اطلاعات جغرافیایی در ارزیابی مخاطرات طبیعی ; Carrara, A., Guzzetti, F., Eds. ناشر Kluwer Academic: Dordrecht، هلند، 1995; صص 38-46. [ Google Scholar ]
- رایشنباخ، پ. گالی، م. کاردینالی، م. گوزتی، اف. Ardizzone، F. نقشه برداری ژئومورفولوژیکی برای ارزیابی خطر زمین لغزش: مفاهیم، روش ها و کاربردها در منطقه Umbria در مرکز ایتالیا. در ارزیابی خطر زمین لغزش ; Glade, T., Anderson, MG, Crozier, MJ, Eds. جان وایلی: هوبوکن، نیوجرسی، ایالات متحده آمریکا، 2005; صص 38-46. [ Google Scholar ]
- گالی، م. آردیزون، اف. کاردینالی، م. گوزتی، اف. Reichenbach, P. مقایسه نقشههای فهرست زمین لغزش. ژئومورفولوژی 2008 ، 94 ، 268-289. [ Google Scholar ] [ CrossRef ]
- زینگ، ی. یو، جی. زیژنگ، جی. چن، ی. هو، جی. Travé، A. نقشهبرداری حساسیت زمین لغزش در مقیاس بزرگ با استفاده از یک مدل یادگیری ماشینی یکپارچه: مطالعه موردی در کوههای لولیانگ چین. جلو. علوم زمین 2021 ، 9 ، 622. [ Google Scholar ] [ CrossRef ]
- یوسف، ع.م. پورقاسمی، نقشهبرداری حساسیت زمین لغزش منابع انسانی با استفاده از الگوریتمهای یادگیری ماشین و مقایسه عملکرد آنها در حوضه آبها، منطقه عسیر، عربستان سعودی. Geosci. جلو. 2021 ، 12 ، 639-655. [ Google Scholar ] [ CrossRef ]
- گوا، ز. شی، ی. هوانگ، اف. فن، X. Huang, J. روش پهنه بندی حساسیت زمین لغزش بر اساس درخت تصمیم C5.0 و الگوریتم های خوشه ای K-means برای بهبود کارایی مدیریت ریسک. Geosci. جلو. 2021 ، 12 ، 101249. [ Google Scholar ] [ CrossRef ]
- روسی، جی. کاتانی، اف. لئونی، ال. سگونی، س. Tofani, V. HIRESSS: یک شبیه ساز پایداری شیب مبتنی بر فیزیکی برای کاربردهای HPC. نات سیستم خطرات زمین. علمی 2013 ، 13 ، 151-166. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- بیچی، ای. کلیمش، جی. فری، اچ. هوگل، سی. استروزی، تی. Cochachin، A. مدلسازی حساسیت زمین لغزش در مقیاس منطقهای در Cordillera Blanca، پرو-مقایسه رویکردهای مختلف. رانش زمین 2019 ، 16 ، 395-407. [ Google Scholar ] [ CrossRef ]
- گوتز، JN; برنینگ، آ. پتچکو، اچ. لئوپولد، پی. ارزیابی تکنیکهای یادگیری ماشین و پیشبینی آماری برای مدلسازی حساسیت زمین لغزش. محاسبه کنید. Geosci. 2015 ، 81 ، 1-11. [ Google Scholar ] [ CrossRef ]
- فام، بی تی؛ شیرزادی، ع. شهابی، ح. امیدوار، ای. سینگ، SK; ساهانا، م. اصل، DT; احمد، بی بی. Quoc، NK; لی، اس. ارزیابی حساسیت زمین لغزش توسط الگوریتم های جدید یادگیری ماشین ترکیبی. پایداری 2019 ، 11 ، 4386. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- پلی کرتیس، سی. Chalkias, C. مقایسه و ارزیابی نقشه های حساسیت زمین لغزش به دست آمده از وزن شواهد، رگرسیون لجستیک و مدل های شبکه عصبی مصنوعی. Nat Hazards 2018 ، 93 ، 249-274. [ Google Scholar ] [ CrossRef ]
- هوانگ، ی. ژائو، ال. بررسی نقشهبرداری حساسیت زمین لغزش با استفاده از ماشینهای بردار پشتیبان. CATENA 2018 ، 165 ، 520–529. [ Google Scholar ] [ CrossRef ]
- چن، دبلیو. Xie، X. وانگ، جی. پرادان، بی. هونگ، اچ. Bui، DT; دوان، ز. Ma، J. مطالعه مقایسه ای درخت مدل لجستیک، جنگل تصادفی، و طبقه بندی و مدل های درخت رگرسیون برای پیش بینی فضایی حساسیت زمین لغزش. CATENA 2017 ، 151 ، 147-160. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- کیم، جی سی؛ لی، اس. یونگ، اچ اس. لی، اس. نقشهبرداری حساسیت زمین لغزش با استفاده از مدلهای جنگل تصادفی و درخت تقویتشده در پیونگ چانگ، کره. Geocarto Int. 2018 ، 33 ، 1000-1015. [ Google Scholar ] [ CrossRef ]
- دانگ، وی اچ. Dieu، TB; Tran، XL; Hoang، ND افزایش دقت پیشبینی زمین لغزش ناشی از بارندگی در امتداد جادههای کوهستانی با طبقهبندی جنگل تصادفی مبتنی بر GIS. گاو نر مهندس جئول محیط زیست 2019 ، 78 ، 2835–2849. [ Google Scholar ] [ CrossRef ]
- کاوزوغلو، تی. کولکسن، آی. شاهین، تکنیکهای یادگیری ماشین EK در نقشهبرداری حساسیت زمین لغزش: یک بررسی و یک مطالعه موردی. تئوری زمین لغزش Pr. مدل. 2019 ، 9 ، 283-301. [ Google Scholar ]
- پناهی، م. رحمتی، ا. رضایی، ف. لی، اس. محمدی، ف. Conoscenti, C. کاربرد روش گروهی پردازش داده ها (GMDH) برای پهنه بندی حساسیت زمین لغزش با استفاده از متغیرهای کمکی فضایی در دسترس. CATENA 2022 ، 208 ، 105779. [ Google Scholar ] [ CrossRef ]
- آذرافزا، م. آذرافزا، م. آکگون، اچ. اتکینسون، PM؛ درخشانی، ر. نگاشت حساسیت زمین لغزش مبتنی بر یادگیری عمیق. علمی Rep. 2021 , 11 , 24112. [ Google Scholar ] [ CrossRef ] [ PubMed ]
- Nhu، V.-H. شیرزادی، ع. شهابی، ح. سینگ، SK; الانصاری، ن. کلگ، جی جی. جعفری، ع. چن، دبلیو. میراکی، س. دوو، جی. و همکاران نگاشت حساسیت زمین لغزش کم عمق: مقایسه ای بین درخت مدل لجستیک، رگرسیون لجستیک، درخت بیز ساده، شبکه عصبی مصنوعی، و الگوریتم های ماشین بردار پشتیبان. بین المللی جی. محیط زیست. Res. بهداشت عمومی 2020 , 17 , 2749. [ Google Scholar ] [ CrossRef ] [ PubMed ]
- ژو، سی. یین، ک. کائو، ی. احمد، بی. لی، ی. کاتانی، اف. پورقاسمی، مدلسازی حساسیت زمین لغزش منابع انسانی با استفاده از روشهای یادگیری ماشین: مطالعه موردی از لونگجو در منطقه مخزن سه دره، چین. محاسبه کنید. Geosci. 2018 ، 112 ، 23-37. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- گوتز، JN; گاتری، RH; برنینگ، A. برداشت جنگل با افزایش فعالیت زمین لغزش در طول طوفان شدید باران در جزیره ونکوور، کانادا همراه است. Natl. سیستم خطرات زمین. علمی بحث و گفتگو. 2014 ، 15 ، 1311-1330. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- دو، جی. یونس، AP; Bui، DT; مرغدی، ع. ساهانا، م. زو، ز. چن، CW; خسروی، ک. یانگ، ی. Pham، BT ارزیابی الگوریتمهای جنگل تصادفی پیشرفته و درخت تصمیم برای مدلسازی حساسیت زمین لغزش ناشی از بارندگی در جزیره آتشفشانی ایزو-اوشیما، ژاپن. علمی کل محیط. 2019 ، 662 ، 332-346. [ Google Scholar ] [ CrossRef ]
- براک، جی. شراتز، پی. پتچکو، اچ. موئنچو، جی. میکو، ام. برنینگ، A. عملکرد مدل های حساسیت زمین لغزش به طور بحرانی به کیفیت مدل های ارتفاعی دیجیتال بستگی دارد. Geomat. نات خطر خطرات 2020 ، 11 ، 1075-1092. [ Google Scholar ] [ CrossRef ]
- ما، ز. می، جی. Piccialli، F. یادگیری ماشینی برای پیشگیری از لغزش: یک بررسی. محاسبات عصبی Appl. 2020 ، 33 ، 10881-10907. [ Google Scholar ] [ CrossRef ]
- چانگ، KT; مرغدی، ع. یونس، AP; فام، بی تی؛ Dou, J. ارزیابی اثرات مقیاس متغیرهای توپوگرافی در مدلهای حساسیت زمین لغزش با استفاده از تکنیکهای یادگیری ماشین مبتنی بر GIS. علمی جمهوری 2020 ، 9 ، 12296. [ Google Scholar ] [ CrossRef ] [ PubMed ] [ نسخه سبز ]
- مشخصات محصول DHM v1.0.0. در دسترس آنلاین: https://dataforsyningen.dk/asset/PDF/produkt_dokumentation/dhm-prodspec-v1.0.0.pdf (دسترسی در 31 مه 2021).
- هنریکسن، اچ جی; کراگ، اس جی. گوتفردسن، جی. اوندراچک، ام. ون تیل، م. یاکوبسن، آ. اشنایدر، RJM; کوچ، جی. ترولدبورگ، ال. راسموسن، پی. و همکاران مستندات گزارش ودر. Modelleverancer til Hydrologisk Informations- og Prognosessystem ; De Nationale Geologiske Undersøgelser for Danmark og Grønland: København، دانمارک، 2020. [ Google Scholar ]
- فروشگاه اینترنتی. در دسترس آنلاین: https://frisbee.geus.dk/geuswebshop/ (دسترسی در 19 آوریل 2021).
- بینزر، ک. Stockmarr, J. نقشه زمین شناسی دانمارک، 1:500000. توپوگرافی سطح پیش کواترنر دانمارک. دانمارک Geol. Undersøgelse Kortserie 1994 , 44 . [ Google Scholar ]
- هاکانسون، ای. پدرسن، SS Geologisk kort بر فراز den danske undergrund. Varv 1992 ، 2 ، 60-63. [ Google Scholar ]
- یاکوبسن، روابط عمومی؛ هرمانسن، بی. Tougaard, L. Danmarks Digitale Jordartskort 1:25,000, Vers. 5.0 ; Danmarks og Grønlands Geologiske Undersøgelse Rapport 2020/18; Danmarks og Grønlands Geologiske Undersøgelse: کپنهاگ، دانمارک، 2020. [ Google Scholar ]
- Thejll، P. بوبرگ، اف. اشمیت، تی. کریستینسن، بی. کریستنسن، روشهای OB مورد استفاده در اطلس آب و هوای دانمارک . گزارش DMI 19-17; موسسه هواشناسی دانمارک: کپنهاگ، دانمارک، 2019. [ Google Scholar ]
- سلیم، ن. هوک، من؛ توماسی، نیویورک؛ جاوید، ا. سجاد، الف. پارامترهای مشتق شده از و/یا استفاده شده با مدل های رقومی ارتفاع (DEMs) برای نقشه برداری حساسیت زمین لغزش و ارزیابی خطر زمین لغزش: مروری. ISPRS Int. J. Geoinf. 2019 ، 8 ، 545. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- ویلسون، MFJ; اوکانل، بی. براون، سی. Guinan, JC; Grehan، AJ تجزیه و تحلیل زمین چند مقیاسی داده های عمق سنجی چند پرتو برای نقشه برداری زیستگاه در شیب قاره. مار. جئود. 2007 ، 30 ، 3-35. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- محلینگم، ر. اولسن، MJ ارزیابی تأثیر منبع و تفکیک فضایی DEMs بر محصولات مشتق مورد استفاده در نقشه برداری زمین لغزش. Geomat. نات خطر خطرات 2016 ، 7 ، 1835-1855. [ Google Scholar ] [ CrossRef ]
- معرفی کلیماتلاس. در دسترس آنلاین: https://www.dmi.dk/klimaatlas/ (دسترسی در 31 مه 2021).
- کوهن، م. Johnson, K. Applied Predictive Modeling , 1st ed.; Springer: نیویورک، نیویورک، ایالات متحده آمریکا، 2013. [ Google Scholar ]
- چن، آرسی; دیوی، سی. هوانگ، جنوب غربی؛ Caraka، RE انتخاب ویژگی های حیاتی برای طبقه بندی داده ها بر اساس روش های یادگیری ماشین. J. Big Data 2020 , 7 . [ Google Scholar ] [ CrossRef ]
- بریمن، ال. جنگل تصادفی. ماخ فرا گرفتن. 2001 ، 45 ، 5-32. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- برنینگ، الف. مدلهای پیشبینی فضایی برای خطرات زمین لغزش: بررسی، مقایسه و ارزیابی. نات سیستم خطرات زمین. علمی 2005 ، 5 ، 853-862. [ Google Scholar ] [ CrossRef ]
- پدرگوسا، اف. واروکو، جی. گرامفورت، آ. میشل، وی. تیریون، بی. گریزل، او. بلوندل، م. پرتنهوفر، پی. ویس، آر. دوبورگ، وی. و همکاران Scikit-Learn: یادگیری ماشینی در پایتون. جی. ماخ. فرا گرفتن. Res. 2011 ، 12 ، 2825-2830. [ Google Scholar ]
- کوهن، م. Johnson, K. Feature Engineering and Selection: A Practical Approach for Predictive Models , 1st ed.; CRC Press: Boca Raton، FL، USA; تیلور و فرانسیس: آکسفوردشایر، بریتانیا، 2019. [ Google Scholar ]
- لیلسند، TM; کیفر، RW; چیپمن، JW سنجش از دور و تفسیر تصویر . جان وایلی و پسران: هوبوکن، نیوجرسی، ایالات متحده آمریکا، 2008. [ Google Scholar ]
- کوتو، وی. Deshpande, B. Predictive Analytics and Data Mining: Concepts and Practice with RapidMiner , 1st ed.; مورگان کافمن: برلینگتون، MA، ایالات متحده آمریکا، 2015. [ Google Scholar ]
- چانگ، سی جی اف; Fabbri، AG اعتبارسنجی مدلهای پیشبینی فضایی برای نقشهبرداری خطر زمین لغزش. Nat Hazards 2003 ، 30 ، 451-472. [ Google Scholar ] [ CrossRef ]
- سان، ایکس. چن، جی. بائو، ی. هان، ایکس. ژان، جی. پنگ، دبلیو. نقشهبرداری حساسیت زمین لغزش با استفاده از تحلیل رگرسیون لجستیک در امتداد رودخانه جینشا و شاخههای آن در نزدیکی شهرستان Derong و Deqin، جنوب غربی چین. ISPRS Int. J. Geo-Inf. 2018 ، 7 ، 438. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- Bui، DT; لوفمن، او. Revhaug، I. دیک، او. تجزیه و تحلیل حساسیت زمین لغزش در استان هوآ بین ویتنام با استفاده از شاخص آماری و رگرسیون لجستیک. Nat Hazards 2011 ، 59 ، 1413-1444. [ Google Scholar ] [ CrossRef ]
- لی، اس. هنگ، اس.-م. یونگ، اچ.-اس. یک ماشین بردار پشتیبانی برای نقشهبرداری حساسیت زمین لغزش در استان گانگوون، کره. پایداری 2017 ، 9 ، 48. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- هونگ، اچ. خو، سی. چن، دبلیو. ارائه نقشه حساسیت زمین لغزش در شهرستان نانچنگ، چین، با پیادهسازی ماشینهای بردار پشتیبانی. صبح. جی. جئوگر. Inf. سیستم 2017 ، 6 ، 1-13. [ Google Scholar ]
- هابوموگیشا، جی.ام. چن، ن. رحمان، م. اسلام، م.م. احمد، ح. البلتاگی، ا. شارما، جی. لیزا، SN; دوان، الف. نقشهبرداری حساسیت زمین لغزش با الگوریتمهای یادگیری عمیق. پایداری 2022 ، 14 ، 1734. [ Google Scholar ] [ CrossRef ]
- فیورنتینی، ن. معبودی، م. لندری، پ. لوسا، م. Gerke، M. پیشبینی حرکت سطحی و نقشهبرداری برای مدیریت زیرساختهای جادهای توسط اندازهگیریهای PS-InSAR و الگوریتمهای یادگیری ماشین. Remote Sens. 2020 , 12 , 3976. [ Google Scholar ] [ CrossRef ]

شکل 1. منطقه مطالعه انتخاب شده.

شکل 2. نمای کلی از نقاط مرکز زمین لغزش (زرد) و مقدار معادلی از نقاط غیر لغزشی نمونه برداری تصادفی (بنفش).

شکل 3. چارچوب روش شناختی برای حل مسئله.
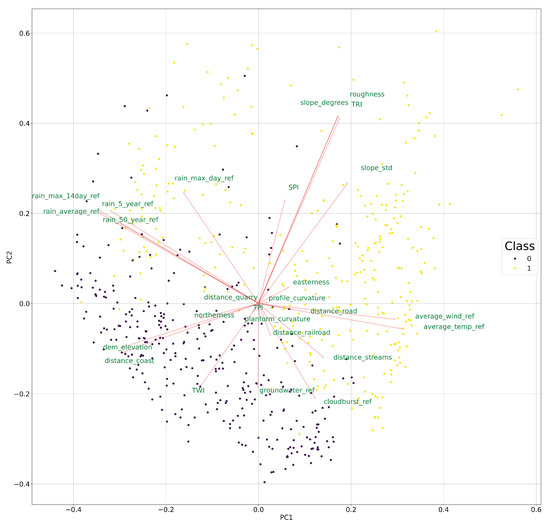
شکل 4. بای پلات PCA با بارگذاری اجزای اصلی متغیرها، که در آن کلاس 0 نمونه های غیر لغزشی را نشان می دهد، در حالی که کلاس 1 لغزش است.

شکل 5. ماتریس با همبستگی پیرسون بین متغیرهای پیش بینی کننده.

شکل 6. اهمیت ویژگی از مدل RF.

شکل 7. منطقه برای اعتبار سنجی خارجی، به استثنای جزیره Soenderby.

شکل 8. نمودار منحنیهای AUC-ROC برای مدل ML با مجموعه پیشبینیکننده I-بدون متغیرهای آب و هوایی.

شکل 9. نمودار منحنیهای AUC-ROC برای مدل ML با مجموعه پیشبینیکننده II – با متغیرهای آب و هوا.

شکل 10. نقشه حساسیت زمین لغزش با مجموعه پیش بینی I-بدون متغیرهای آب و هوایی.

شکل 11. نقشه حساسیت زمین لغزش با مجموعه پیش بینی کننده II – با متغیرهای آب و هوا.

شکل 12. نقشه حساسیت به زمین لغزش – سناریوی آینده RCP8.5 برای 2070-2100.


10 نظرات