

نقشه برداری دریاچه های یخبندان با استفاده از تصاویر ماهواره ای PlanetScope و یادگیری عمیق
خلاصه
نقشه برداری دریاچه های یخبندان با استفاده از داده های سنجش از دور ماهواره ای برای مطالعه اثرات تغییرات آب و هوا و همچنین برای کاهش و ارزیابی خطر سیل طغیان دریاچه یخی (GLOF) مهم است. صورت فلکی مکعب 3U از آزمایشگاه سیاره قابلیت تصویربرداری از کل خشکی زمین را هر روز با وضوح فضایی 3 تا 4 متر ارائه می دهد. وضوح مکانی بالاتر و همچنین وضوح زمانی تصاویر PlanetScope در مقایسه با Landsat-8 و Sentinel-2، آن را به یک منبع داده با ارزش برای نظارت بر دریاچه های یخچالی تبدیل می کند. بنابراین، این مقاله پتانسیل تصاویر PlanetScope را برای نقشه برداری دریاچه های یخچالی با تمرکز بر منطقه هندوکش، قراقورام و هیمالیا (HKKH) بررسی می کند. اگرچه زمان بازدید مجدد از تصاویر PlanetScope کوتاه است، اما بیش از 130 ماهواره کوچک، این تصویر تنها شامل چهار باند است و حسگرهای تصویربرداری در این ماهوارههای کوچک پاسخهای طیفی متفاوت و همچنین محدوده دینامیکی پایینتری را نشان میدهند. علاوه بر این، وجود سایههای ریختهشده در مناطق کوهستانی و امضای طیفی متفاوت پیکسلهای آب به دلیل تفاوت در ترکیب، کدورت و عمق، استخراج خودکار و مطمئن آب سطحی در تصاویر PlanetScope را چالشبرانگیز میکند.

با در نظر گرفتن این چالشها، این کار از مدلهای یادگیری عمیق پیشرفته برای طبقهبندی پیکسلی تصاویر PlanetScope به پیکسلهای آب و پسزمینه استفاده میکند و نتایج را با طبقهبندیکنندههای Random Forest و Support Vector Machine مقایسه میکند. مدل یادگیری عمیق مبتنی بر معماری محبوب U-Net است. ما معماری U-Net را مشابه U-Net اصلی و همچنین U-Net با ستون فقرات EfficientNet از پیش آموزش دیده ارزیابی می کنیم. به منظور آموزش شبکه عصبی عمیق، دادههای حقیقت زمینی با دیجیتالی کردن دستی آب سطحی در تصاویر PlanetScope با کمک تصاویر ماهوارهای با وضوح بسیار بالا (VHRS) تولید میشوند. مجموعه داده ایجاد شده شامل بیش از 5000 آب با مساحت تقریبی است. 71کیلومتر2در هشت سایت مختلف در منطقه HKKH. ارزیابی داده های آزمون نشان می دهد که U-Net با ستون فقرات EfficientNet به بالاترین امتیاز F1 0.936 دست یافت. سپس یک مقایسه بصری با موجودی دریاچه های یخچالی موجود بر روی یخچال طبیعی بالتورو در محدوده Karakoram انجام می شود. نتایج نشان میدهد که مدل یادگیری عمیق دریاچههای بیشتری را نسبت به موجودیهای موجود، که از تصاویر Landsat OLI مشتق شدهاند، شناسایی کرد. مدل آموزشدیده بیشتر بر روی تصاویر سری زمانی PlanetScope از دو دریاچه یخچالی که منجر به طغیان سیل شدهاند، ارزیابی میشود. خروجی U-Net نیز با داده های GLakeMap مقایسه می شود. نتایج نشان می دهد که وضوح مکانی و زمانی بالاتر تصاویر PlanetScope یک مزیت قابل توجه در زمینه نقشه برداری و نظارت بر دریاچه های یخچالی است.
کلید واژه ها:
GLOF ; U-Net ; EfficientNet ; چیترال ؛ موج یخچال های طبیعی شیشپر ; یخچال بالتورو
چکیده گرافیکی
1. معرفی
نقشه برداری و پایش دریاچه های یخچالی در رشته کوه های مرتفع به دلیل آسیب پذیری جمعیت پایین دست در برابر سیلاب های طغیان دریاچه های یخبندان (GLOF) ضروری است. تغییرات در تعداد و اندازه دریاچه های یخبندان نیز با تغییرات آب و هوایی مرتبط است و بنابراین، نقشه برداری از این تغییرات به منظور مطالعه تأثیر تغییرات آب و هوایی مهم است [1 ] . رشته کوه های مرتفع هندوکش، قراقورام و هیمالیا (HKKH) حاوی تعداد زیادی یخچال طبیعی و دریاچه های یخچالی است. اکثر یخچال های طبیعی در HKKH در دهه های گذشته تعادل جرمی منفی را نشان داده اند و نازک شدن و عقب نشینی در شرق هیمالیا در مقایسه با رشته کاراکورام بیشتر است [2] .]. یخچال های طبیعی در حال عقب نشینی و همچنین گرم شدن آب و هوا، تعداد و اندازه دریاچه های یخچالی را افزایش داده است. تعداد رویدادهای GLOF نیز در پاسخ به عقب نشینی و نازک شدن یخچال افزایش یافته است. دریاچه های یخبندان انواع مختلفی دارند، به عنوان مثال، دریاچه سد شده مورین، دریاچه فرسایش یخچالی، دریاچه فوق یخبندان و دریاچه مسدود شده از یخ [ 3 ]. طغیان سیل غالباً با رسوب بهمن به دریاچه یا از کار افتادن دریاچه های یخ زده یا مورین ایجاد می شود [ 4 ، 5 ]. تعداد دریاچه ها و همچنین دریاچه های بالقوه خطرناک در این منطقه در حال افزایش است [ 4 ، 6]. بسیاری از دریاچه ها در ارتفاعات بالا و بدون دسترسی مناسب قرار دارند. یک رویداد اخیر GLOF در ناحیه چیترال در محدوده هندوکش توسط یک دریاچه یخچالی تازه تشکیل شده در ارتفاع 4500 متری ایجاد شد [ 7 ]. دریاچهها نیز به دلیل موج یخچالها شکل گرفتهاند که در آن یخچال مسیر رودخانه را مسدود میکند و دریاچهای با سد یخچالی ایجاد میکند [ 8 ، 9 ]. در گذشته نه چندان دور، موج خیز یخچال های طبیعی خوردوپین و یخچال شیشپر در رشته کوه قراقورم باعث ایجاد چنین دریاچه هایی شده و خروج آب از این دریاچه ها باعث جاری شدن سیل در ناحیه پایین دست شده است [8، 10 ، 11 ] .]. بنابراین، یافتن روش های خودکار برای نقشه برداری آب های سطحی با استفاده از تصاویر سنجش از دور ضروری است.
در حوزه سنجش از دور نوری، تصاویر آزادانه موجود از Sentinel-2، Landsat-8 و ASTER به طور بالقوه می توانند برای نقشه برداری از آب های سطحی استفاده شوند [12 ، 13 ، 14 ، 15 ، 16 ] . در میان این منابع داده، Sentinel-2A,2B بالاترین وضوح فضایی 10 متر را همراه با زمان بازبینی کوتاهتر پنج روزه ارائه میدهد. با این حال، ابرها ممکن است از یک تصویر واضح برای مدت طولانیتری جلوگیری کنند، که ممکن است نظارت مکرر دریاچههای یخچالی را محدود کند. از سوی دیگر، صورت فلکی مکعب از آزمایشگاه سیاره پوشش جهانی روزانه با وضوح فضایی 3 متر را فراهم می کند و بنابراین منبع داده بسیار مهمی برای نقشه برداری و نظارت بر دریاچه های یخچالی است [ 10 ،17 ]. صورت فلکی ماهوارهای Planet Labs از 130 + 3U مکعب با اکثریت ماهوارهها در مدار خورشید سنکرون تشکیل شده است که صحنهها را در چهار باند، آبی (455-515 نانومتر)، سبز (500-590 نانومتر)، قرمز (590-590) میگیرد. 670 نانومتر) و مادون قرمز نزدیک (780-860 نانومتر). تصاویر PlanetScope دارای ردپای صحنه تقریباً می باشد. 24.4کیلومتر × 8.1 کیلومتر. ماهواره ها پس از یک فاصله زمانی تقریباً یک ثانیه ای صحنه ها را ضبط می کنند که منجر به همپوشانی کوچکی بین صحنه های متوالی می شود. چالش های اصلی کار با تصاویر PlanetScope در مقایسه با Sentinel-2 یا Landsat-8 این است که تصاویر PlanetScope تنها از چهار باند تشکیل شده است، سنسورهای تصویربرداری در ماهواره های کوچک محدوده دینامیکی پایین تری دارند و پاسخ های طیفی این ماهواره ها تغییرات را حتی پس از کالیبراسیون سنسور همانطور که در شکل 1 نشان داده شده است نشان دهید . بنابراین، تمرکز این مطالعه بر اکتشاف تصاویر PlanetScope 4 باند برای استخراج آب های سطحی و ارزیابی دقت آن در زمینه نقشه برداری و نظارت بر دریاچه های یخچالی در منطقه HKKH است. تصاویر PlanetScope قبلاً در نقشه برداری آب های سطحی استفاده شده است [ 18]، محاسبه سرعت آب [ 19 ]، عمق سنجی [ 20 ، 21 ] و پایش زیستگاه اعماق دریا [ 22 ]. Planet Labs از طریق برنامه آموزشی و تحقیقاتی خود دسترسی محدودی به داده های رایگان را برای محققان و دانشگاهیان ارائه می دهد. داده های مورد استفاده در این کار از طریق این برنامه آموزشی و پژوهشی به دست آمده است.
استخراج آب در تصاویر ماهوارهای چند طیفی اغلب با استفاده از شاخص تفاوت عادی آب (NDWI) [ 23 ] یا شاخص تفاوت عادی آب اصلاح شده (MNDWI) [ 24 ] اجرا میشود. این شاخص ها بر اساس کاهش بازتاب آب در طول موج های NIR و SWIR نسبت به طیف مرئی است. NDWI با استفاده از تفاوت نرمال شده باندهای سبز و NIR محاسبه می شود. MNDWI از تفاوت نرمال شده گرین و MIR [ 23 ] یا باندهای SWIR محاسبه می شود و تمایل دارد در مناطق ساخته شده بهتر از NDWI عمل کند. مطالعات قبلی در مورد استخراج دریاچههای یخچالی نیز از NDWI و MNDWI برای استخراج آب در تصاویر ماهوارهای سنجش از دور چند طیفی استفاده کردهاند [ 25]، 26 ]. NDWI همچنین برای استخراج آب در تصاویر PlanetScope استفاده شده است [ 18 ]. تفاوت های نرمال شده با استفاده از ترکیبات نواری مختلف نیز برای نقشه برداری کسر آب مورد مطالعه قرار گرفته است [ 27 ]. آستانه مورد استفاده برای طبقه بندی آب از بقیه پیکسل ها اغلب بر اساس صحنه تنظیم می شود. انتخاب آستانه NDWI یا MNDWI یک کار بی اهمیت نیست زیرا دریاچه ها، حتی در مجاورت نزدیک، بسته به کدورت، ترکیب و عمق آب دریاچه می توانند دارای نشانه های طیفی متفاوتی باشند [28] .]. سایه های ریخته شده به عنوان یکی از چالش های اصلی در نقشه برداری از پیکسل های آب در مناطق کوهستانی است. در چنین زمین های کوهستانی، شیب حاصل از DEM نیز برای حذف خطاهای ناشی از سایه ها استفاده شده است [ 29 ]. تکنیکهای طبقهبندی تصویر مبتنی بر پیکسل [ 30 ، 31 ] و تقسیمبندی مبتنی بر شی [ 32 ] نیز برای نقشهبرداری از آبهای سطحی استفاده شدهاند. کاوشگر جهانی آبهای سطحی [ 30] یک سیستم خودکار است که می تواند برای نقشه برداری جهانی از آب های سطحی استفاده شود. با این حال، بر اساس سری Landsat است، بنابراین محدودیتهایی در نظارت بر پویایی دریاچههای یخچالی به دلیل زمان بازدید مجدد طولانیتر دارد. به دلیل مشکلات در نقشه برداری خودکار دریاچه های یخبندان، موجودی دریاچه های یخچالی به طور مداوم به روز شده برای این منطقه وجود ندارد. فهرستهای قبلی دریاچههای یخبندان با استفاده از دیجیتالسازی دستی توسعه یافتهاند یا نیاز به مداخله انسانی قابل توجهی دارند که بهروزرسانیهای مکرر را دشوار میکند [ 29 ، 33 ، 34 ، 35 ، 36 ].
طلوع اخیر یادگیری عمیق نتایج قابل توجهی را در رشته ها و حوزه های مختلف ایجاد کرده است [ 37 ، 38 ، 39 ]. معماریهای یادگیری عمیق رایج برای تشخیص تصویر از لایههای پیچشی متعدد تشکیل شدهاند و به عنوان شبکههای عصبی کانولوشنال (CNN) شناخته میشوند. فیلترهای کانولوشنال از داده های برچسب گذاری شده در طول فرآیند آموزش آموخته می شوند. CNN برای طبقه بندی، تقسیم بندی و وظایف تشخیص اشیاء مختلف در تصاویر سنجش از دور استفاده شده است [ 40]]. برای طبقهبندی تصویر از نظر پیکسلی یا تقسیمبندی معنایی، ورودی CNN یک تصویر است و خروجی اغلب تصویری با همان اندازه با برچسبهای کلاس برای هر پیکسل است. این نوع CNN اغلب شبکههای کاملاً کانولوشنال نامیده میشوند زیرا به جای لایههای کاملاً متصل، دارای لایههای کانولوشن در سراسر شبکه هستند. معماری U-Net [ 41 ] که در ابتدا برای بخشبندی تصویر زیستپزشکی ارائه شد، به نتایج پیشرفتهای برای مسائل مختلف تقسیمبندی تصویر مانند تقسیمبندی ساختمان، استخراج جادهها و سایر وظایف مربوط به تقسیمبندی تصویر سنجش از دور دست یافته است. مدل U-Net همچنین توسط برخی از معماری های با عملکرد برتر در چالش اخیر DeepGlobe [ 42 ]، چالش های Spacenet [ 43] استفاده شده است.] و مسابقه IGARSS Data Fusion [ 44 ] شامل استخراج جاده، بخش بندی ساختمان، پوشش زمین و بازسازی 3 بعدی معنایی از تصاویر ماهواره ای است. با توجه به مشکلات در نقشه برداری خودکار آب های سطحی، در این کار، ما پتانسیل CNN را در استخراج خودکار آب های سطحی در تصاویر PlanetScope 4 باند در زمینه نظارت بر دریاچه یخبندان در HKKH بررسی می کنیم.
2. مواد و روشها
2.1. داده ها
آموزش شبکه های عصبی عمیق معمولاً به تعداد زیادی داده برچسب دار نیاز دارد. در این کار، ما دادههای برچسبگذاری شده را با دیجیتالی کردن دستی آب سطحی در تصاویر PlanetScope با کمک تصاویر ماهوارهای با وضوح بسیار بالا (VHRS) از نقشههای پایه Google Earth و ESRI World Imagery تولید کردهایم. کمک از تصاویر VHRS در فرآیند دیجیتالی سازی ضروری بود زیرا نقشه برداری دقیق از مرز دریاچه در تصاویر PlanetScope در مقایسه با تصاویر VHRS دشوار است. نقشه برداری از دریاچه های فوق یخچالی به دلیل اندازه کوچکتر، مخلوط شدن با برف و سایه های ریخته شده به ویژه چالش برانگیز است. تصاویر PlanetScope با پوشش تقریباً روزانه از سال 2017 در دسترس هستند. انتخاب مکانها در منطقه HKKH برای دیجیتالی کردن بر اساس در دسترس بودن تصاویر با وضوح بسیار بالا از سالهای اخیر در طول تابستان تا اوایل زمستان بود. تاکید بر گنجاندن انواع مناظر حاوی انواع دریاچه های یخچالی مختلف شده است. تصاویر PlanetScope از همان تاریخی که تصاویر با وضوح بسیار بالا دانلود شدند. در برخی موارد، تصاویر PlanetScope از تاریخهای مختلف استفاده میشد، زیرا تصاویر PlanetScope در همان تاریخ پوشش کاملی از منطقه مورد نظر نداشت. یک تصویر موزاییکی از چندین صحنه PlanetScope است که هر مکان را پوشش می دهد و در چندین مورد، موزاییک از تصاویر چندین ماهواره تشکیل شده است. هنگامی که بین چندین صحنه PlanetScope همپوشانی وجود داشت، از دادههای تنها یک صحنه برای پیکسلهای همپوشانی استفاده میشد.شکل 2 ، در حالی که جزئیات در جدول 1 آورده شده است . در اینجا از محصول تابشی PlanetScope Top of Atmosphere (TOA) استفاده شد. تعداد کل چند ضلعی های دیجیتالی شده 5177 در مساحتی حدوداً بود. 4200کیلومتر2و مساحت دریاچه ها تقریباً بود. 71کیلومتر2. حداقل واحد نگاشت بر روی یک پیکسل تنظیم شده بود که دیجیتایزر می تواند آن را به عنوان یک پیکسل آب در تصاویر PlanetScope تشخیص دهد. بنابراین، اگر یک جسم آبی کوچک در تصاویر VHRS قابل مشاهده باشد اما به عنوان پیکسل آب در تصاویر PlanetScope قابل تشخیص نباشد، حذف شده است.
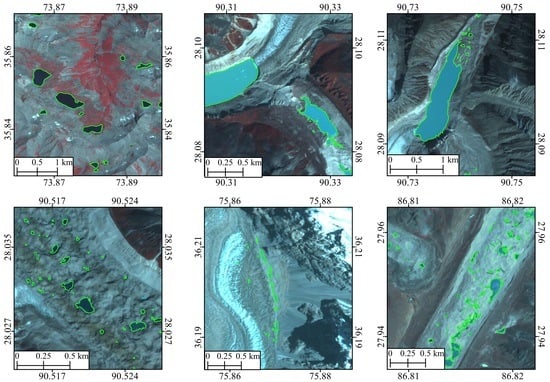
خطاها در تصحیح ارتو به دلیل توپوگرافی و جهت گیری حسگر منجر به تفاوت در موقعیت پیکسل های آب در تصاویر PlanetScope و تصاویر VHRS می شود. در حالی که خطاهای ناشی از جهت گیری حسگر را می توان به عنوان یک تغییر یا تبدیل افین مدل کرد، اعوجاج ناشی از خطاهای توپوگرافی می تواند در تصویر متفاوت باشد و به زاویه بردار پرتو تصویر نسبت به نادر بستگی دارد. بنابراین، هرچه زاویه خارج از نادر بیشتر باشد، تفاوت پیکسل های مربوطه در تصویر VHRS و تصویر PlanetScope بیشتر می شود. بنابراین، تغییر در چند ضلعی های دیجیتالی به صورت بصری بررسی و با پوشاندن چند ضلعی ها در تصاویر PlanetScope تصحیح شد. NDWI و کامپوزیت های رنگ کاذب نیز برای کمک به رقومی ساز در ترسیم مرزهای دریاچه و تعیین تغییر بین تصاویر VHRS و تصاویر PlanetScope استفاده شدند. برخی از نمونه های آب دیجیتالی شده در نشان داده شده استشکل 3 .
چند ضلعی های ایجاد شده توسط فرآیند دیجیتال سازی برای تولید یک ماسک تصویر باینری استفاده شد که در آن پیکسل های پیش زمینه (‘1’) نشان دهنده آب هستند در حالی که پیکسل های پس زمینه (‘0’) نشان دهنده پیکسل های غیر آب هستند. اگر چند ضلعی آب بیش از 50٪ از مساحت پیکسل را پوشش دهد، آنگاه روی “1” تنظیم می شود. نکته مهمی که در اینجا باید در نظر گرفت این است که تمام پیکسل های متعلق به آب باید در ماسک خروجی مورد استفاده برای آموزش CNN ‘1’ باشند. ترسیم پیکسل های آب متعلق به رودخانه ها و نهرها دشوار بود. بنابراین، پیکسل های تصویر متعلق به رودخانه ها و نهرها را پنهان کرده ایم. اندازه کاشی های تصویر غیر همپوشانی 256×256از تصاویر با برچسب PlanetScope ایجاد شد که منجر به 6555 کاشی شد که از این تعداد 20%(1311) کاشی های تصویر به عنوان داده های اعتبار سنجی انتخاب شدند و 20%(1311) کاشی های تصویر به عنوان داده های آزمون به طور تصادفی انتخاب شدند.
2.2. مدل VGG U-Net
CNN مورد استفاده در این کار بر اساس معماری U-Net است که شامل واحدهای رمزگذار و رمزگشا است که با استفاده از یک اتصال میانبر متصل شده اند، همانطور که در شکل 4 نشان داده شده است . واحدهای رمزگذار شامل یک VGG معمولی (شبکه طراحی شده توسط Visual Geometry Group) از نوع [ 45 ] لایه های پیچشی و به دنبال آن نرم افزار دسته ای [ 46] است.] و فعال سازی ReLU (واحدهای خطی اصلاح شده) و سپس یک لایه max-pooling که اندازه فضایی تصویر را پایین می آورد. این واحدهای رمزگذار ویژگی های چند مقیاسی را از تصویر ورودی استخراج می کنند. سپس واحدهای رمزگشا، ماسک تقسیم بندی را از این ویژگی ها تولید می کنند. اتصال میانبر ویژگیهای واحد رمزگذار را با واحد رمزگشای مربوطه به هم پیوند میدهد، که به محلیسازی و تبادل اطلاعات بهتر با استفاده از ویژگیها در مراحل مختلف شبکه کمک میکند. نمونه برداری پایین توسط عملیات maxpooling با گام 2 انجام می شود، در حالی که نمونه برداری با افزایش اندازه فضایی با ضریب 2 با استفاده از درون یابی دو خطی انجام می شود. ما با استفاده از لایههای پیچشی جابجا شده، که میتوانند ضرایب نمونهبرداری را یاد بگیرند، بهبودی را مشاهده نکردیم.شکل 4 . ما چندین اندازه شبکه مختلف را آزمایش کردیم و شبکه نشان داده شده در اینجا پس از ارزیابی مدلهایی با عمق و عرض مختلف انتخاب شد. ما از شبکه VGG16 از پیش آموزش دیده در U-Net به دلیل اندازه بزرگ آن (138 میلیون پارامتر) استفاده نکردیم که منجر به بیش از حد برازش می شود. ارزیابی ما نشان داد که شبکه های نسبتا کوچکتر (از نظر تعداد پارامترها و ردپای حافظه) عملکرد بهتری را در این مجموعه داده نشان دادند.
2.3. EfficientNet مدل U-Net
اغلب ترجیح داده می شود به جای استفاده از یک مدل سفارشی از یک مدل از پیش آموزش دیده استفاده شود، زیرا مدل های از پیش آموزش دیده بر روی مجموعه داده های بزرگ آموزش داده می شوند که باعث کاهش زمان آموزش و همچنین برازش بیش از حد می شود. برای تصاویر ماهواره ای، مدل های آموزش دیده بر روی مجموعه داده هایی مانند Eurosat [ 47 ]، BigEarthNet [ 48 ] و SpaceNet [ 43 ] می توانند برای یادگیری انتقال استفاده شوند. با این حال، تا آنجا که ما می دانیم، هیچ مدل از پیش آموزش دیده ای در دسترس عموم برای تصاویر PlanetScope 4 بانده وجود ندارد. بنابراین، ما از EfficientNet از پیش آموزش دیده استفاده کردیم [ 49] به عنوان ستون فقرات معماری U-Net، زیرا اخیراً نتایج پیشرفته ای را با پارامترهای کمتر و زمان آموزشی کمتر تولید کرده است. EfficientNet بر اساس ایده افزایش یکنواخت اندازه شبکه یعنی عمق، عرض و وضوح ساخته شده است. این یک خانواده از شبکه ها را ایجاد می کند که به عنوان EfficientNets شناخته می شوند. مدل پایه با حدود پنج میلیون پارامتر مدل B0 است، در حالی که بزرگترین مدل B7 با 66 میلیون پارامتر است. بلوکهای سازنده اصلی EfficientNet، بلوک تنگنا معکوس [ 50 ] است که شامل شبکههای فشار و تحریک [ 51] نیز میشود.]. ما مدلهای EfficientNet را از مدل پایه B0 تا مدلهای اندازه بزرگتر ارزیابی کردیم. ما متوجه شدیم که مدل های بزرگتر دقت را بیشتر بهبود نمی بخشند. بنابراین، همانطور که در شکل 5 نشان داده شده است، ما از EfficientNet B0 به عنوان ستون فقرات معماری U-Net استفاده کردیم . لایه های رمزگشا مشابه معماری اصلی U-Net هستند. اولین لایه پیچشی EfficientNet برای ترکیب تصاویر PlanetScope 4 باند تغییر یافت.
2.4. آموزش
آموزش بر روی پردازنده گرافیکی Nvidia RTX 2070 با حافظه 8 گیگابایتی انجام شد. نرخ یادگیری اولیه بر روی 0.01 تنظیم شد، که پس از آن با ضریب 0.1 کاهش می یابد. اندازه دسته روی 16 تنظیم شد. پارامترهای لایه های پیچیدگی یعنی وزن ها با استفاده از روش He’s مقداردهی اولیه شدند [ 52] در مدل سفارشی U-Net و بخش رمزگشای EfficientNet U-Net. کاشی های تصویر ورودی به طور تصادفی از مجموعه داده های آموزشی انتخاب می شوند. از آنجایی که تعداد پیکسلهای آب کمتر از پیکسلهای پسزمینه بود، از کاهش وزنی استفاده کردیم که در آن وزن بالاتری به پیکسلهای آب در طول محاسبه تلفات اختصاص داده شد. افزایش داده ها با استفاده از چرخش تصادفی و آینه سازی و تغییر روشنایی انجام شد. واپاشی وزن پارامترهایپر و مومنتوم به ترتیب دارای مقادیر 0.0005 و 0.9 بودند. این شبکه برای 100 دوره آموزش دیده است. ما بیشتر از صاف کردن برچسب استفاده کردیم [ 53 ، 54]، که بهبود در دقت شبکه را نشان داد. عملکرد شبکه بر روی دادههای اعتبارسنجی پس از هر دوره ارزیابی شد و شبکه آموزشدیده با بهترین عملکرد روی دادههای اعتبارسنجی برای ارزیابی روی مجموعه داده آزمون انتخاب شد. استنتاج با استفاده از شبکه آموزش دیده با استخراج تکه های همپوشانی اندازه انجام شد 256×256از تصاویر PlanetScope پیکسل های حاشیه برای هر پچ نادیده گرفته می شوند. برچسبهای کلاس با جمعبندی احتمالات فردی از هر پچ همپوشانی اختصاص داده شدند. طراحی شبکه، آموزش و استنتاج با استفاده از کتابخانه PyTorch [ 55 ] انجام می شود. استنتاج در صحنه های کامل PlanetScope کمتر از یک دقیقه در GPU RTX2070 طول کشید.
2.5. جنگل تصادفی
جنگل تصادفی (RF) یک طبقهبندی محبوب برای تشخیص دریاچههای یخچالی در تصاویر سنجش از دور بوده است [ 56 ، 57 ، 58]]. بنابراین، برای مقایسه عملکرد CNN، طبقهبندی کننده RF برای طبقهبندی تصاویر PlanetScope به کلاسهای آب و پسزمینه آموزش داده شد. یک طبقهبندی کننده RF مجموعهای از درختان را با زیرمجموعهای تصادفی از نمونهها و ویژگیها میسازد. هر درخت با استفاده از شاخص جینی یا معیار به دست آوردن اطلاعات ساخته شده است. داده های آموزشی موجود نسبتاً بزرگ بود. بنابراین، ما با تعداد متفاوتی از نمونه ها برای آموزش طبقه بندی کننده RF آزمایش کردیم. پس از ارزیابی، 20000 نمونه از هر کلاس را برای ساخت طبقهبندی کننده RF انتخاب کردیم. تعداد درختان 200 درخت تعیین شد. نمونه های خارج از کیسه برای اعتبار سنجی استفاده شد. ورودی طبقه بندی کننده شامل 4 باند از هر پیکسل و همچنین تفاوت نرمال شده باند 4 با سه باند دیگر است. بعد از تمرین،
2.6. ماشین های بردار پشتیبانی
طبقهبندیکننده ماشین بردار پشتیبان (SVM) یک طبقهبندی کننده حاشیه حداکثر است که مرز تصمیم را با حفظ حداکثر فاصله از بردارهای پشتیبان یا نمونههای نزدیک به مرز تصمیم محاسبه میکند. SVM یک طبقه بندی کننده یادگیری ماشینی محبوب بوده است که به طور گسترده در برنامه های مختلف استفاده می شود. مرز تصمیم گیری غیرخطی در SVM با استفاده از ترفند هسته محاسبه می شود، که به طور ضمنی تبدیل نمونه ها را به فضایی با ابعاد بالاتر و همچنین حاصل ضرب نقطه ای نمونه ها انجام می دهد. مشابه طبقهبندیکننده RF، ما از تفاوتهای نرمال شده باند 4 با سه باند دیگر به عنوان ویژگیهای اضافی به عنوان ورودی طبقهبندیکننده استفاده کردیم. تعداد نمونهها، تابع هسته و مقدار گامای تابع هسته برای دستیابی به بهترین عملکرد در دادههای آزمایش تنظیم شدند. استفاده از نمونه های کمتر از پیکسل های آب در مقایسه با پیکسل های پس زمینه، دقت طبقه بندی کننده را افزایش داد. پس از ارزیابی، 1000 نمونه (پیکسل) آب و 5000 نمونه پس زمینه را انتخاب کردیم. پس از ارزیابی، هسته چند جمله ای درجه سوم با مقدار گاما 1 انتخاب شد. آموزش و پیش بینی طبقه بندی کننده SVM با استفاده از LibSVM [59 ].
2.7. عدم قطعیت منطقه دریاچه
عدم قطعیت در مساحت تخمین زده شده دریاچه ها به تعداد پیکسل های محیط دریاچه بستگی دارد. در اینجا، ما فرض کردیم ±1عدم قطعیت پیکسل در محیط دریاچه اگر G وضوح فضایی تصویر و P محیط دریاچه باشد، عدم قطعیت در ناحیه دریاچه با استفاده از فرمول [ 60 ] محاسبه میشود:
آهr(1σ)=0.6872×پجی×جی2.
2.8. معیارهای ارزیابی
ارزیابی بر روی داده های آزمون با استفاده از دقت (معادله ( 2 ))، یادآوری (معادله ( 3 ))، امتیاز F1 (معادله ( 4 )) و ضریب کاپا (معادله ( 5 )) انجام شد. F1-Score میانگین هارمونیک Precision و Recall است. دقت و یادآوری با استفاده از مثبت های واقعی ( TP )، مثبت های کاذب ( FP ) و منفی های کاذب ( FN ) محاسبه می شوند که می توانند با استفاده از ماتریس سردرگمی محاسبه شوند.
پrهجمنسمنon=تیپتیپ+افپ
آرهجآلل=تیپتیپ+افن
اف1اسجorه=2×پrهجمنسمنon×آرهجآللپrهجمنسمنon+آرهجآلل
کآپپآسیoهf.=ن×∑ایکسمنمن-∑(ایکسمن+×ایکس+من)ن2-∑(ایکسمن+×ایکس+من)
کاپا کوف. همچنین با استفاده از ماتریس سردرگمی محاسبه شد، که در آن N تعداد کل پیکسل ها است. ایکسمنمنعناصر مورب ماتریس سردرگمی هستند، ایکسمن+و ایکس+منمجموع سطرها و ستون های ماتریس سردرگمی هستند. این معیارهای ارزیابی با در نظر گرفتن تمام پیکسلهای 1311 کاشی دادههای آزمایشی محاسبه میشوند. بنابراین، یک ماتریس سردرگمی منفرد با استفاده از تمام پیکسلهای دادههای آزمایشی محاسبه میشود و سپس معیارهای ارزیابی با استفاده از این ماتریس سردرگمی محاسبه میشوند.
3. نتایج
3.1. ارزیابی بر روی داده های آزمون
از مدلهای U-Net آموزشدیده (VGG U-Net و کارآمد U-Net)، طبقهبندیکنندههای RF و SVM برای پیشبینی دادههای آزمون استفاده شد. دقت مدل ها با استفاده از متریک های Precision، Recall، F1 Score و Kappa Coef ارزیابی می شود. همانطور که در جدول 2 آورده شده است . مدل EfficientNet U-Net بالاترین امتیاز F1 و ضریب کاپا را به دست آورد. به ترتیب 0.936 و 0.935، در حالی که VGG UNet به امتیاز F1 و Kappa Coef دست یافت. به ترتیب 0.930 و 0.929. با توجه به عملکرد بهتر EfficientNet U-Net، ما بیشتر از این مدل برای استنتاج تصاویر PlanetScope استفاده کردیم. طبقه بندی کننده RF به امتیاز F1 و کاپا ضریب دست یافت. از 0.754، در حالی که SVM به امتیاز F1 0.775 وکاپا کوف. از 0.771 این نشان میدهد که مدلهای یادگیری عمیق در مقایسه با طبقهبندیکنندههای RF و SVM به دقت بهتری دست مییابند. مقایسه چند ضلعی های حقیقت زمین، EfficientNet U-Net و طبقه بندی کننده RF در شکل 6 نشان داده شده است . تعداد قابل توجهی از مثبت کاذب در سایه ها و دست کم گرفتن مرز دریاچه توسط طبقه بندی جنگل تصادفی همانطور که در شکل 6 نشان داده شده است وجود دارد . برای مقایسه بصری، ماسک های باینری پیش بینی شده به چند ضلعی تبدیل می شوند و با چند ضلعی های حقیقت زمین مقایسه می شوند که در شکل 7 نشان داده شده است.. نتایج نشان میدهد که در اکثر دریاچهها، چندضلعیهای پیشبینیشده و همچنین چندضلعیهای حقیقت زمینی تا حد زیادی با هم همپوشانی دارند. حوضچه های کوچکتر فوق یخبندان گاهی اوقات توسط مدل U-Net نادیده گرفته شده اند.
3.2. نقشه برداری دریاچه های فوق یخبندان در یخچال بالتورو و مقایسه با موجودی دریاچه های یخچالی موجود
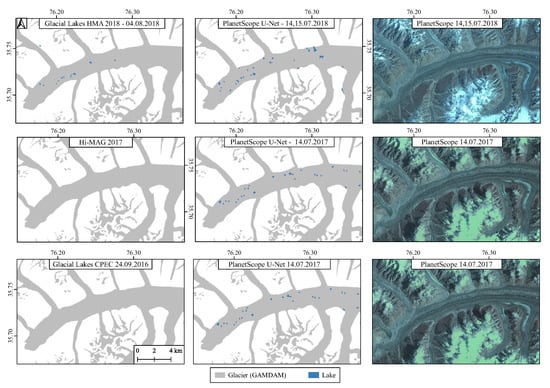
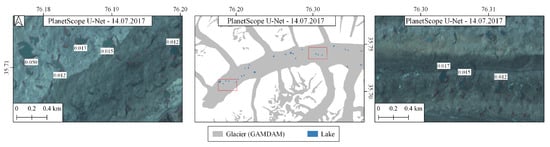
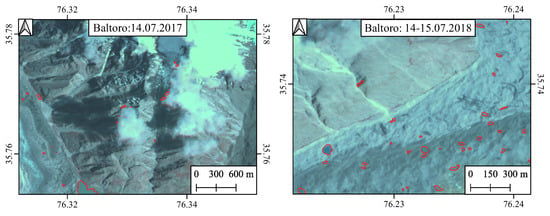
سپس دریاچههای فوق یخبندان را در یخچال بالتورو نقشهبرداری کردیم ( شکل 8 ) و نتایج را با فهرست موجودی دریاچههای یخچالی موجود در گذشته نزدیک که با در دسترس بودن دادههای PlanetScope همپوشانی داشتند، مقایسه کردیم. شکل 9 ، تغییرات دریاچه های فوق یخبندان را در فاصله زمانی حدود دو هفته نشان می دهد. تجزیه و تحلیل بصری چندین تفاوت را در دریاچه های فوق یخبندان در فاصله زمانی کوتاه نشان می دهد. شکل 10دریاچه های فوق یخبندان را با اختلاف زمانی یک سال نشان می دهد. تغییرات در طول یک سال بسیار قابل توجه تر بود و برخی از دریاچه های نسبتا بزرگتر فوق یخبندان نیز از نظر تعداد و اندازه تغییراتی را نشان می دهند. مدل U-Net آموزش دیده قادر به استخراج خودکار اکثر دریاچه های فوق یخبندان بود. اندازه دریاچه های فوق یخبندان در یخچال بالتورو که با استفاده از تصاویر PlanetScope از تاریخ های مختلف نقشه برداری شده اند در جدول 3 آورده شده است . سپس از فهرستهای زیر برای مقایسه استفاده کردیم: (1) فهرست دریاچههای یخی آسیای کوهستانی بالا [ 36 ]، (2) مجموعه دادهای از دریاچههای یخچالی در آسیای کوهستانی بالا (Hi-MAG) از سال 2008 تا 2017 [ 61 ] و (3) دریاچه های یخچالی در کریدور اقتصادی چین-پاکستان (CPEC) [ 62]. این سه موجودی از تصاویر Landsat-8 (سالهای اخیر) به دست آمده اند. حداقل مساحت نقشه برداری (1) است 0.0054کیلومتر2(2) است 0.0081کیلومتر2و (3) است 0.01کیلومتر2. این فهرستها بر تکنیکهای دستی [ 36 ] یا نیمه خودکار [ 61 ، 62 ] برای ترسیم دریاچههای یخچالی با استفاده از تصاویر Landsat تکیه کردهاند . مقایسه دریاچه های فوق یخبندان در شکل 11 و جدول 4 ارائه شده است که نشان می دهد چندین دریاچه در فهرست موجود نیست [ 36 ] و موجودی ها [ 61 ، 62 ] دریاچه هایی را در یخچال بالتورو شناسایی نکرده اند، حتی اگر داده ها در جدول 3 نشان می دهد که تعداد قابل توجهی از دریاچه ها مساحتی بیشتر از حداقل مساحت نقشه برداری این موجودی ها دارند. شکل 12منطقه را به همراه هر دریاچه دارای مساحت نشان می دهد >0.01کیلومتر2. در اینجا لازم به ذکر است که در حال حاضر کل خشکی زمین تحت پوشش تصاویر روزانه PlanetScope قرار ندارد. این منطقه به دلیل تغییر در تعداد ماهواره های عملیاتی و همچنین به دلیل موقعیت و جهت گیری ماهواره ها تغییر کرد. کل منطقه یخچال بالتورو توسط یک صحنه PlanetScope پوشیده نشده است و چندین صحنه برای پوشش دادن کل یخچال بالتورو مورد نیاز است. بنابراین، به دلیل پوشش جزئی، نمیتوانیم از تصاویر PlanetScope از همان تاریخی که در این فهرستها استفاده شده است استفاده کنیم.
3.3. مقایسه با خط لوله خودکار GLakeMap
سپس به صورت بصری نقشهبرداری دریاچههای یخچالی را با نتایج خط لوله خودکار «GLakeMap» برای نقشهبرداری دریاچههای یخچالی با استفاده از دادههای Sentinel-1 و Sentinel-2 [56 ] مقایسه میکنیم . GLakeMap از تقسیمبندی مبتنی بر قانون برای استخراج بخشها از تصاویر Sentinel-1/2 و دادههای DEM استفاده میکند و سپس آن بخشها را با استفاده از یک طبقهبندی جنگل تصادفی طبقهبندی میکند. حداقل منطقه نقشه برداری در GLakeMap است 0.01کیلومتر2و این روش در هشت سایت مختلف در سراسر جهان آزمایش شد. شکل 13 مقایسه خطوط کلی مدل های GLakeMap (Sentinel-1/2) و U-Net (PlanetScope) را در منطقه ای در بوتان نشان می دهد. دریاچه های نسبتا بزرگتر به خوبی توسط U-Net و GLakeMap ترسیم شده اند. با این حال، مدل U-Net دریاچه های کوچکتر را نیز به خوبی استخراج کرده است.
3.4. نمونه هایی از طغیان دریاچه و نقشه برداری منطقه دریاچه
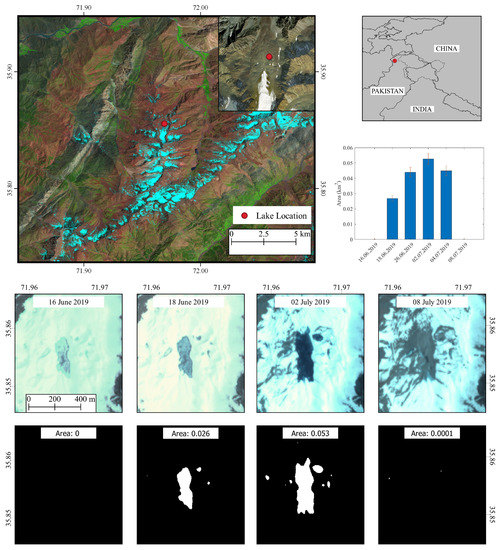
سپس مدل آموزش دیده U-Net بر روی تصاویر PlanetScope از تصاویر سری زمانی دو دریاچه یخچالی مختلف مورد ارزیابی کیفی قرار گرفت. ابتدا، رویداد GLOF را در ناحیه چیترال در رشته کوه هندوکش در ژوئیه 2019 در نظر گرفتیم که ناشی از یک دریاچه یخچالی تازه تشکیل شده در انتهای مورن یخچال روگلی در ارتفاع حدود 4500 متری است که در شکل 14 نشان داده شده است . تصاویر PlanetScope شکل گیری دریاچه را نشان می دهد که توسط مدل آموزش دیده در تصویر PlanetScope از 18 ژوئن 2019 همانطور که در شکل 14 نشان داده شده است، شناسایی شده است . رویداد GLOF در 7 ژوئیه 2019 در حدود ساعت 5:00 بعد از ظهر رخ داد [ 7]. تصویر PlanetScope از 8 ژوئیه 2019 نشان می دهد که دریاچه خشک شده است. حداکثر مساحت سطح دریاچه استخراج شده توسط مدل یادگیری عمیق 0.052 کیلومتر است 2. تشخیص زودهنگام دریاچه در چنین سناریویی به دلیل مخلوطی از آب یخ زده و ذوب شده چالش برانگیز است. داده های آموزشی مورد استفاده در این کار حاوی موارد مشابهی بود که در آن دریاچه حاوی آب تا حدی یخ زده است. بنابراین، مدل یادگیری عمیق توانست دریاچه را در صحنه PlanetScope در 18 ژوئن 2019 استخراج کند. در صحنه های قبلی، شکل گیری دریاچه را می توان به صورت بصری شناسایی کرد اما توسط U-Net شناسایی نشد.
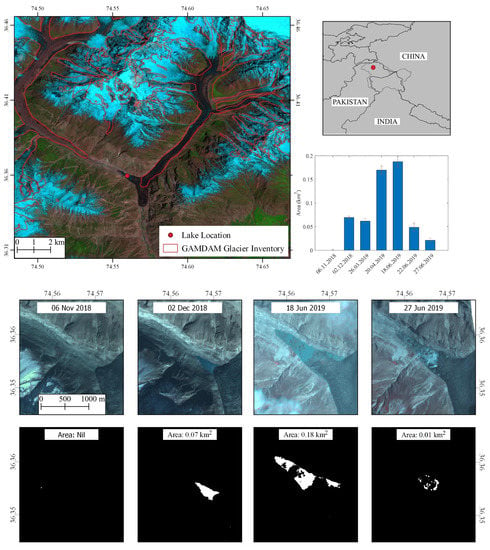
سپس U-Net آموزش دیده در صحنه های PlanetScope دریاچه یخچالی که توسط موج یخچال های طبیعی شیشپر تشکیل شده است، آزمایش می شود. یخچال طبیعی شیشپر در محدوده کاراکورام در بهار 2018 با حداکثر سرعت به 20 متر در روز شروع به افزایش کرد. یخچال طبیعی که در شکل 15 نشان داده شده است، خروجی یخچال موچوار را مسدود کرد و در نتیجه دریاچه شکل گرفت . این دریاچه به اندازه 0.18 کیلومتر رشد کرد 2در ماه مه/ژوئن 2019. دریاچه در اواخر ژوئن 2019 از طریق یک جریان زیر یخبندان تخلیه شد و باعث سیل متوسط در منطقه پایین دست شد، اما آسیب با دیوارهای حفاظتی ساخته شده توسط مقامات با پیش بینی سیل احتمالی کاهش یافت. سطح دریاچه همانطور که در شکل 15 نشان داده شده است، تا حدی حاوی زباله و یخ است که نقشه برداری دقیق از آب های سطحی را دشوار می کند. تجزیه و تحلیل بصری نتایج نشان می دهد که U-Net قادر به استخراج آب های سطحی و جداسازی آن از زباله ها به خوبی قابل قبول است.
4. بحث
نتایج ارائه شده در بالا نشان می دهد که مدل مبتنی بر یادگیری عمیق را می توان در عمل برای استخراج خودکار دریاچه های یخچالی در تصاویر PlanetScope استفاده کرد. نتایج نشان میدهد که حتی با وجود تغییرات در تصاویر ماهوارههای مختلف PlanetScope، مدل یادگیری عمیق قادر به تعمیم و عملکرد خوبی بر روی تصاویر دیدهنشده PlanetScope از یک منطقه متفاوت است. همانطور که در شکل 16 نشان داده شده است، ما در طول ارزیابی خود برخی از نقاط مثبت کاذب را روی پیکسل های لبه های ابر مشاهده کرده ایم.. شاید بتوان این مشکل را با استفاده از ماسک های ابری ارائه شده در داده های تکمیلی PlanetScope یا گنجاندن ابرها در داده های آموزشی حل کرد. نتایج مثبت کاذب نیز به دلیل ایجاد سایه در تصاویر یخچال بالتورو و شیشپر مشاهده شد. ما همچنین مشاهده کردهایم که برخی از دریاچهها با رنگ قهوهای گلآلود توسط U-Net استخراج نشدهاند، که نشان میدهد دادههای آموزشی نیاز به گسترش دارند تا تمام انواع دریاچههای ممکن را که ممکن است رخ دهند، شامل شود. نکته مهم دیگری که در اینجا باید در نظر گرفت این است که نقشهبرداری دریاچههای بزرگتر گاهی آسانتر از دریاچههای نسبتاً کوچکتر است و دریاچههای بزرگتر وزن بیشتری در معیارهای حاصل دارند، زیرا حاوی پیکسلهای بیشتری هستند، یعنی معیارهای ارزیابی بیشتر تحت تأثیر دریاچههای بزرگتر هستند. . بنابراین، می توان معیارهای ارزیابی محاسباتی را برای اندازه های مختلف دریاچه در نظر گرفت.
در تولید دادههای برچسبگذاری شده، جابجایی نسبی بدنههای آبی بین تصاویر VHRS و تصاویر PlanetScope یک مسئله اصلی بود و اصلاح آن به زمان زیادی نیاز داشت. به دلیل وضوح کمتر تصاویر PlanetScope، گاهی اوقات تعیین این تغییر بسیار دشوار بود و در نتیجه، حتی داده های برچسب گذاری شده نیز دارای برخی نادرستی هستند. هنگام تولید دادههای برچسبگذاریشده، تعیین مرز آبهای بسیار کمعمق نیز بسیار دشوار است و ترسیم آن به تفسیر دیجیتایزر بستگی دارد. برخی از دریاچه های کوچک در فرآیند دیجیتالی سازی اولیه از دست رفتند، اما U-Net آموزش دیده توانست آن دریاچه ها را استخراج کند. بنابراین، ما از مدل U-Net برای ردیابی خطاها در فرآیند دیجیتالی کردن و تصحیح آن خطاها و آموزش مجدد شبکه استفاده کردیم. ترسیم دقیق دریاچه های فوق یخبندان به دلیل اندازه کوچکتر، مخلوط با برف و زباله و سایه های ریخته شده بسیار چالش برانگیز است. تغییرات وسعت دریاچه های فوق یخبندان در بازه زمانی کوتاه نیز استفاده و مقایسه تصاویر تاریخ های مختلف را دشوار می کند.
رویداد GLOF در منطقه چیترال اهمیت نقشه برداری مکرر دریاچه های یخچالی را نشان می دهد زیرا دریاچه های جدیدی می توانند تشکیل شوند که ممکن است پس از مدتی به طور ناگهانی تخلیه شوند. چنین رویدادهایی در گذشته رخ داده است و نظارت بر چنین موقعیت هایی با استفاده از مجموعه داده های سنجش از دور ضروری است. اتوماسیون کل فرآیند ضروری است زیرا این منطقه در یک منطقه بزرگ پخش می شود و امکان بازرسی بصری کل منطقه وجود ندارد. لازم به ذکر است که بروز GLOF به عوامل مختلفی بستگی دارد. در این کار، ما فقط سعی کردیم منطقه دریاچه را در یک صحنه پویا بدون در نظر گرفتن احتمال طغیان نقشه برداری کنیم. سدسازی دریاچه های یخچالی یکی از عوامل مهم در تعیین دریاچه های یخچالی به عنوان دریاچه های بالقوه خطرناک است.
در مورد موج یخچال های طبیعی شیشپر، حجم دریاچه در طول زمان تغییر کرده و نقشه برداری مکرر به تعیین مقدار آب و محاسبه شبیه سازی تخلیه آب و سناریوهای احتمالی سیل کمک می کند. لازم به ذکر است در روز تخلیه دریاچه در چیترال و شیشپر به دلیل وجود ابر هیچ صحنه ای از PlanetScope موجود نبود. بنابراین، با توجه به محدودیت در دسترس بودن تصاویر بدون ابر در بخشهایی از HKKH، هر راهحلی برای نظارت بر آبهای سطحی از ماهوارههای سنجش از راه دور نیز باید دادههای ماهوارهای نوری و مایکروویو را در آینده بهویژه با توجه به پیشرفتهای اخیر شرکتهای تجاری در بر گیرد. برای ایجاد مجموعه ای از ماهواره های رادار دیافراگم مصنوعی (SAR) [ 64]. گنجاندن دادههای سنجش از دور مایکروویو برای نقشهبرداری دریاچههای یخچالی اجتنابناپذیر است.
دادههای برچسبگذاریشده تولید شده در این کار فقط منطقه HKKH را پوشش میدهد. ارزیابی قابلیت انتقال مدل به منطقه مورد مطالعه متفاوت نیز جالب است. در اینجا، نقشه دریاچه های یخچالی در آند پرو را با استفاده از تصاویر PlanetScope و مدل آموزش دیده U-Net همانطور که در شکل 17 نشان داده شده است . برای مقایسه، خطوط دریاچه یخبندان Cordillera Blanca (پرو) [ 65 ]، که از تفسیر بصری تصاویر ماهواره ای به دست آمده است نیز به عنوان مرجع نشان داده شده است. تجزیه و تحلیل بصری نتایج نشان می دهد که مدل U-Net آموزش دیده به خوبی به سایر حوزه ها تعمیم می یابد.
5. نتیجه گیری ها
در این مقاله، ما پتانسیل تصاویر PlanetScope را برای نقشه برداری دریاچه های یخچالی در HKKH بررسی کردیم. با توجه به مشکلات ذاتی در نقشه برداری آب های سطحی در مناطق کوهستانی، از مدل مبتنی بر یادگیری عمیق برای نقشه برداری آب های سطحی استفاده شد. مجموعه داده ای متشکل از بیش از 5000 توده آبی که مساحتی حدوداً در بر می گیرد. 71 کیلومتر 2در هشت سایت مختلف در HKKH ایجاد شد. نتایج روی تصاویر آزمایشی نشان داد که مدل U-Net با ستون فقرات EfficientNet به دقت بالاتری (امتیاز F1 0.936) نسبت به U-Net با لایههای سبک VGG، طبقهبندیکنندههای RF و SVM دست یافت. نتایج همچنین نشان داد که در ماسکهای آب پیشبینیشده نکات مثبت کاذب کمی وجود دارد در حالی که اکثر پیکسلهای آب به درستی توسط مدل آموزشدیده شناسایی شدهاند. سپس از مدل U-Net آموزشدیده برای نقشهبرداری دریاچههای فوق یخبندان در یخچال بالتورو استفاده شد و نتایج نشان داد که مدل U-Net دریاچههای بیشتری را نسبت به فهرست موجودی دریاچههای یخبندان اخیراً منتشر شده استخراج کرده است. این نشان می دهد که حتی با تصاویر 4 باندی از ماهواره های کوچک PlanetScope، می توان دریاچه های یخبندان را به طور قابل اعتمادی استخراج کرد. این نتایج به ویژه قابل توجه است زیرا بیشتر کارهای قبلی بر تصاویر سنجش از دور چند طیفی با تعداد باندهای بالاتر تکیه داشتند. مقایسه با نتایج GLakeMap همچنین نشان داد که مدل U-Net میتواند دریاچههای یخچالی را با استفاده از تصاویر PlanetScope با دقت بالا شناسایی کند. وضوح مکانی و زمانی بالاتر تصاویر PlanetScope می تواند به طور قابل توجهی نقشه برداری از دریاچه های یخچالی را بهبود بخشد. سپس U-Net آموزش دیده در تصاویر سری زمانی PlanetScope از دو دریاچه یخچالی مختلف با سطح آب متفاوت ارزیابی شد. منطقه آب در حال تغییر به خوبی توسط مدل U-Net در صحنه های PlanetScope ترسیم شد. این نشان میدهد که مدل آموزشدیده شده روی تصاویر PlanetScope نیز که بخشی از مجموعه داده دیجیتالی اصلی نبودند، به خوبی کار میکند. رویداد GLOF در منطقه چیترال اهمیت نقشه برداری مکرر دریاچه های یخچالی را نشان می دهد. دریاچه یخی/مورن تازه تشکیل شده بر روی یخچال روغلی به طور ناگهانی تخلیه شد و آسیب قابل توجهی به زیرساخت های پایین دست وارد کرد. تشخیص زودهنگام دریاچه در چنین سناریویی به تسریع تلاشهای کاهش کمک میکند، که ممکن است آسیبهای ناشی از طغیان سیل را کاهش دهد. Planet Labs قصد دارد در سال 2020 ماهواره های PlanetScope را با قابلیت تصویربرداری 8 باندی پرتاب کند، این ممکن است دقت نقشه برداری دریاچه های یخچالی را در تصاویر PlanetScope بیشتر بهبود بخشد، اما به داده های آموزشی از ماهواره های نسل جدید نیاز دارد. تشخیص زودهنگام دریاچه در چنین سناریویی به تسریع تلاشهای کاهش کمک میکند، که ممکن است آسیبهای ناشی از طغیان سیل را کاهش دهد. Planet Labs قصد دارد در سال 2020 ماهواره های PlanetScope را با قابلیت تصویربرداری 8 باندی پرتاب کند، این ممکن است دقت نقشه برداری دریاچه های یخچالی را در تصاویر PlanetScope بیشتر بهبود بخشد، اما به داده های آموزشی از ماهواره های نسل جدید نیاز دارد. تشخیص زودهنگام دریاچه در چنین سناریویی به تسریع تلاشهای کاهش کمک میکند، که ممکن است آسیبهای ناشی از طغیان سیل را کاهش دهد. Planet Labs قصد دارد در سال 2020 ماهواره های PlanetScope را با قابلیت تصویربرداری 8 باندی پرتاب کند، این ممکن است دقت نقشه برداری دریاچه های یخچالی را در تصاویر PlanetScope بیشتر بهبود بخشد، اما به داده های آموزشی از ماهواره های نسل جدید نیاز دارد.
منابع
- شوگر، دی اچ. بور، ا. هاریتاشیا، بریتانیا؛ Kargel، JS; واتسون، CS; کندی، ام سی; Bevington، AR; Betts، RA; هریسون، اس. Strattman, K. رشد سریع دریاچه های یخچالی در سراسر جهان از سال 1990. Nat. صعود چانگ. 2020 ، 1-7. [ Google Scholar ] [ CrossRef ]
- برون، اف. برتیه، ای. واگنون، پی. کاب، ع. Treichler, D. برآورد فضایی حلوفصل توازن توده یخچالهای طبیعی کوهستان بالا آسیا از سال 2000 تا 2016. Nat. Geosci. 2017 ، 10 ، 668. [ Google Scholar ] [ CrossRef ] [ PubMed ]
- یائو، ایکس. لیو، اس. هان، ال. سان، م. ژائو، L. تعریف و سیستم طبقه بندی دریاچه یخچالی برای مطالعه موجودی و خطرات. جی. جئوگر. علمی 2018 ، 28 ، 193-205. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- رونس، دی. واتسون، سی. McKinney، D. شناسایی خطر و خطر برای دریاچه های یخچالی در هیمالیا نپال با استفاده از تصاویر ماهواره ای از 2000-2015. Remote Sens. 2017 , 9 , 654. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- بولچ، تی. بوکروتنر، ام.اف. پیترز، جی. بیسلر، ام. Bajracharya، S. شناسایی حرکت یخچالها و دریاچههای بالقوه خطرناک یخچالی در منطقه کوه اورست/نپال با استفاده از تصاویر فضابرد. نات سیستم خطرات زمین. علمی 2008 ، 8 ، 1329-1340. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- ریچاردسون، اس.دی. رینولدز، جی ام مروری بر خطرات یخبندان در هیمالیا. کوات. بین المللی 2000 ، 65 ، 31-47. [ Google Scholar ] [ CrossRef ]
- Chitral، D. Golain، Chitral GLOF Event ; معاون کمیسر: چیترال پایین، پاکستان، 2019. [ Google Scholar ]
- اشتاینر، جی اف. Kraaijenbrink، PD; جیدوک، اس جی. Immerzeel، WW کوتاه ارتباط: موج یخچال Khurdopin بازبینی شد-سرعت جریان شدید و تشکیل یک دریاچه سد در سال 2017. Cryosphere 2018 ، 12 ، 95-101. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- رعنا، ارزیابی خطر AS از موج یخچال طبیعی خوردوپین و سازند دریاچه سد شده یخچالی . اداره هواشناسی پاکستان: اسلام آباد، پاکستان، 2017.
- تولید غفار، S. DEM از تصاویر چند ماهواره ای PlanetScope. Remote Sens. 2018 , 10 , 1462. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- بامبری، ر. واتسون، CS; هویت، ک. هاریتاشیا، بریتانیا؛ Kargel، JS; شاهی، AP; چاند، پی. کومار، ا. ورما، ا. گوویل، اچ. موج خطرناک 2017-2019 و سدسازی رودخانه توسط یخچال شیسپار، کاراکورام. علمی جمهوری 2020 ، 10 ، 1-14. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- سیوان پیلایی، ر. میلر، SN بهبود در نقشه برداری آب با استفاده از داده های ASTER. Ecol. آگاه کردن. 2010 ، 5 ، 73-78. [ Google Scholar ] [ CrossRef ]
- بوشتی، ام. نوتینی، اف. مانفرون، جی. Brivio، PA; نلسون، A. تجزیه و تحلیل مقایسه ای از شاخص های طیفی تفاوت نرمال مشتق شده از MODIS برای تشخیص آب سطحی در سیستم های کشت برنج غرقاب شده. PLoS ONE 2014 ، 9 ، e88741. [ Google Scholar ] [ CrossRef ]
- دو، ی. ژانگ، ی. لینگ، اف. وانگ، کیو. لی، دبلیو. Li, X. نقشهبرداری اجسام آبی از تصاویر Sentinel-2 با شاخص تفاوت نرمال شده آب اصلاح شده در وضوح فضایی 10 متری که با تیز کردن نوار SWIR تولید میشود. Remote Sens. 2016 ، 8 ، 354. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- دو، ز. لی، دبلیو. ژو، دی. تیان، ال. لینگ، اف. وانگ، اچ. گی، ی. Sun، B. تجزیه و تحلیل تصاویر Landsat-8 OLI برای نقشه برداری آب سطح زمین. سنسور از راه دور Lett. 2014 ، 5 ، 672-681. [ Google Scholar ] [ CrossRef ]
- Wessels, RL; Kargel، JS; کیفر، HH ASTER اندازه گیری دریاچه های فوق یخبندان در منطقه کوه اورست هیمالیا. ان گلاسیول. 2002 ، 34 ، 399-408. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- تیم سیاره. رابط برنامه کاربردی Planet: In Space for Life on Earth . تیم سیاره: سانفرانسیسکو، کالیفرنیا، ایالات متحده آمریکا، 2017. [ Google Scholar ]
- کولی، SW; اسمیت، ال سی. استپان، ال. Mascaro, J. ردیابی تغییرات دینامیک آب سطح شمالی با تصاویر سیاره CubeSat با فرکانس بالا. Remote Sens. 2017 ، 9 ، 1306. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- کاب، ع. آلتنا، بی. Mascaro, J. رودخانه-یخ و سرعت آب با استفاده از صورت فلکی مکعب نوری سیاره. هیدرول. سیستم زمین علمی 2019 ، 23 ، 4233-4247. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- پورسانیدیس، د. تراگانوس، دی. کریسولاکیس، ن. Reinartz، P. Cubesats تخمین های مکانی-زمانی بالایی از عمق سنجی مشتق شده از ماهواره را امکان پذیر می کند. Remote Sens. 2019 , 11 , 1299. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- نیرومند جدیدی، م. بوولو، اف. بروزون، ال. Gege, P. Bathymetry و بازیابی کیفیت آب مبتنی بر فیزیک با استفاده از تصاویر PlanetScope: تأثیرات قرنطینه COVID-19 2020 و سیل شدید 2019 در تالاب ونیز. Remote Sens. 2020 , 12 , 2381. [ Google Scholar ] [ CrossRef ]
- ویکاسونو، پی. Lazuardi، W. ارزیابی تصاویر PlanetScope برای نقشه برداری زیستگاه اعماق دریا و گونه های علف دریایی در یک محیط پیچیده آب کم عمق نوری. بین المللی جی. ریموت. Sens. 2018 , 39 , 5739–5765. [ Google Scholar ] [ CrossRef ]
- McFeeters، SK استفاده از شاخص تفاوت عادی آب (NDWI) در ترسیم ویژگیهای آب آزاد. بین المللی J. Remote Sens. 1996 ، 17 ، 1425-1432. [ Google Scholar ] [ CrossRef ]
- Xu، H. اصلاح شاخص آب تفاوت نرمال شده (NDWI) برای افزایش ویژگی های آب باز در تصاویر سنجش از راه دور. بین المللی جی. ریموت. Sens. 2006 , 27 , 3025-3033. [ Google Scholar ] [ CrossRef ]
- واتسون، CS; کینگ، او. مایلز، ES؛ Quincey، DJ بهینهسازی طبقهبندی حوضچههای فوق یخبندان NDWI در یخچالهای طبیعی پوشیده از زباله هیمالیا. سنسور از راه دور محیط. 2018 ، 217 ، 414-425. [ Google Scholar ] [ CrossRef ]
- چن، اف. ژانگ، ام. تیان، بی. Li، Z. استخراج خطوط دریاچه یخبندان در فلات تبت با استفاده از تصاویر Landsat 8 و موتور Google Earth. IEEE J. Sel. بالا. Appl. زمین Obs. Remote Sens. 2017 , 10 , 4002–4009. [ Google Scholar ] [ CrossRef ]
- نیرومند جدیدی، م. Vitti، A. بازسازی مرزهای رودخانه در وضوح زیر پیکسل: تخمین و تخصیص فضایی بخش های آب. ISPRS Int. J. Geo-Inf. 2017 ، 6 ، 383. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- فیشر، ا. سیل، ن. Danaher, T. مقایسه روشهای شاخص آب لندست برای طبقهبندی خودکار آب در شرق استرالیا. سنسور از راه دور محیط. 2016 ، 175 ، 167-182. [ Google Scholar ] [ CrossRef ]
- گاردل، جی. آرنو، ی. Berthier, E. تکامل دریاچه های یخچالی در امتداد رشته کوه هیمالیا هندوکش بین سال های 1990 و 2009. Glob. سیاره. چانگ. 2011 ، 75 ، 47-55. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- پکل، جی اف. کوتام، ا. گولیک، ن. Belward، AS نقشه برداری با وضوح بالا از آب های سطحی جهانی و تغییرات طولانی مدت آن. طبیعت 2016 ، 540 ، 418-422. [ Google Scholar ] [ CrossRef ]
- آچاریا، تی دی. سبدی، ع. لی، DH ارزیابی الگوریتم های یادگیری ماشین برای استخراج آب سطحی در صحنه لندست 8 نپال. Sensors 2019 , 19 , 2769. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- کورزنیوفسکا، ک. Korup، O. تشخیص مبتنی بر شی دریاچههای مستعد پوشش یخی فصلی در فلات تبت. Remote Sens. 2017 , 9 , 339. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- ژانگ، جی. یائو، تی. زی، اچ. وانگ، دبلیو. یانگ، دبلیو. فهرستی از دریاچه های یخچالی در منطقه قطب سوم و تغییرات آنها در پاسخ به گرمایش جهانی. گلوب. سیاره. چانگ. 2015 ، 131 ، 148-157. [ Google Scholar ] [ CrossRef ]
- اوکیتا، جی. ناراما، سی. تادونو، تی. یامانوکچی، تی. تومیاما، ن. کاواموتو، اس. آبه، سی. اودا، تی. یابوکی، اچ. فوجیتا، ک. و همکاران فهرست دریاچه یخبندان بوتان با استفاده از داده های ALOS: روش ها و نتایج اولیه ان گلاسیول. 2011 ، 52 ، 65-71. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- سنس، ا. ماراگنو، دی. فوگازا، دی. سونچینی، آ. داگاتا، سی. آزونی، آر اس؛ مینورا، یو. الحسن، ر. Vuillermoz، E. آصف خان، م. و همکاران فهرستی از یخچالهای طبیعی و دریاچههای یخچالی پارک ملی قراقورام مرکزی (CKNP– پاکستان). J. Maps 2018 , 14 , 189–198. [ Google Scholar ] [ CrossRef ]
- وانگ، ایکس. گوا، ایکس. یانگ، سی. لیو، کیو. وی، جی. ژانگ، ی. لیو، اس. ژانگ، ی. جیانگ، ز. فهرست دریاچه های یخبندان تانگ، زی در کوهستان های بلند آسیا (1990-2018) برگرفته از تصاویر Landsat. سیستم زمین علمی بحث داده ها 2020 ، 12 ، 2169-2182. [ Google Scholar ] [ CrossRef ]
- او، ک. ژانگ، ایکس. رن، اس. Sun, J. یادگیری باقیمانده عمیق برای تشخیص تصویر. در مجموعه مقالات کنفرانس IEEE در مورد دید کامپیوتری و تشخیص الگو، لاس وگاس، NV، ایالات متحده، 27-30 ژوئن 2016. صص 770-778. [ Google Scholar ]
- کریژفسکی، آ. سوتسکور، آی. هینتون، GE Imagenet طبقه بندی با شبکه های عصبی کانولوشن عمیق. در مجموعه مقالات کنفرانس سیستم های پردازش اطلاعات عصبی، دریاچه تاهو، NV، ایالات متحده، 3-6 دسامبر 2012. ص 1097-1105. [ Google Scholar ]
- نقره ای، دی. هوانگ، آ. مدیسون، سی جی; گئز، آ. سیفره، ال. ون دن دریش، جی. شریتویزر، جی. آنتونوگلو، آی. Panneershelvam، V. لانکتوت، ام. و همکاران تسلط بر بازی Go با شبکه های عصبی عمیق و جستجوی درخت. Nature 2016 , 529 , 484. [ Google Scholar ] [ CrossRef ]
- زو، XX; تویا، دی. مو، ال. Xia، GS; ژانگ، ال. خو، اف. Fraundorfer, F. یادگیری عمیق در سنجش از دور: بررسی جامع و فهرست منابع. IEEE Geosci. سنسور از راه دور Mag. 2017 ، 5 ، 8-36. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- رونبرگر، او. فیشر، پی. Brox، T. U-Net: شبکههای کانولوشن برای تقسیمبندی تصویر پزشکی. در مجموعه مقالات کنفرانس بین المللی محاسبات تصویر پزشکی و مداخله به کمک کامپیوتر، مونیخ، آلمان، 5 تا 9 اکتبر 2015. Springer: برلین، آلمان، 2015; صص 234-241. [ Google Scholar ]
- دمیر، من. کوپرسکی، ک. لیندنباوم، دی. پانگ، جی. هوانگ، جی. باسو، س. هیوز، اف. تویا، دی. Raskar, R. Deepglobe 2018: چالشی برای تجزیه زمین از طریق تصاویر ماهواره ای. در دسترس آنلاین: https://deepglobe.org (در 24 سپتامبر 2020 قابل دسترسی است).
- ون اتن، ا. لیندنباوم، دی. Bacastow، TM Spacenet: مجموعه داده های سنجش از دور و مجموعه چالش. arXiv 2018 , arXiv:1807.01232. [ Google Scholar ]
- بوش، ام. فاستر، ک. کریستی، جی. وانگ، اس. هاگر، جی دی. براون، M. استریوی معنایی برای تصاویر ماهواره ای تصادفی. در مجموعه مقالات کنفرانس زمستانی IEEE 2019 در مورد کاربردهای بینایی کامپیوتری (WACV)، روستای Waikoloa، HI، ایالات متحده آمریکا، 7 تا 11 ژانویه 2019؛ صص 1524-1532. [ Google Scholar ]
- سیمونیان، ک. Zisserman, A. شبکه های پیچیده بسیار عمیق برای تشخیص تصویر در مقیاس بزرگ. arXiv 2014 ، arXiv:1409.1556. [ Google Scholar ]
- آیوف، اس. Szegedy, C. Batch normalization: تسریع آموزش عمیق شبکه با کاهش تغییر متغیر داخلی. در مجموعه مقالات سی و دومین کنفرانس بین المللی کنفرانس بین المللی یادگیری ماشین، لیل، فرانسه، 6 تا 11 ژوئیه 2015؛ صص 448-456. [ Google Scholar ]
- هلبر، پی. بیشکه، بی. دنگل، ا. Borth، D. Eurosat: یک مجموعه داده جدید و معیار یادگیری عمیق برای طبقهبندی کاربری و پوشش زمین. IEEE J. Sel. بالا. Appl. زمین Obs. Remote Sens. 2019 , 12 , 2217–2226. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- سومبول، جی. کانگ، جی. کروزیگر، تی. مارسلینو، اف. کاستا، اچ. Benevides، P. کائتانو، م. Demir، B. مجموعه داده BigEarthNet با یک کلاس-نامگذاری جدید برای درک تصویر سنجش از دور. arXiv 2020 ، arXiv:2001.06372. [ Google Scholar ]
- تان، م. Le، QV Efficientnet: بازاندیشی مقیاسبندی مدل برای شبکههای عصبی کانولوشن. arXiv 2019 ، arXiv:1905.11946. [ Google Scholar ]
- سندلر، ام. هوارد، آ. زو، ام. ژموگینوف، آ. Chen, LC Mobilenetv2 باقیمانده های معکوس و تنگناهای خطی. در مجموعه مقالات کنفرانس IEEE در مورد بینایی کامپیوتری و تشخیص الگو، سالت لیک سیتی، UT، ایالات متحده آمریکا، 18 تا 22 ژوئن 2018؛ ص 4510–4520. [ Google Scholar ]
- هو، جی. شن، ال. Sun, G. شبکه های فشار و تحریک. در مجموعه مقالات کنفرانس IEEE در مورد بینایی کامپیوتری و تشخیص الگو، سالت لیک سیتی، UT، ایالات متحده آمریکا، 18 تا 22 ژوئن 2018؛ صص 7132–7141. [ Google Scholar ]
- او، ک. ژانگ، ایکس. رن، اس. Sun, J. عمیق در یکسو کننده ها: پیشی گرفتن از عملکرد سطح انسانی در طبقه بندی شبکه تصویری. در مجموعه مقالات کنفرانس بین المللی IEEE در بینایی کامپیوتر، سانتیاگو، شیلی، 7 تا 13 دسامبر 2015. ص 1026-1034. [ Google Scholar ]
- سگدی، سی. ونهوک، وی. آیوف، اس. شلنز، جی. Wojna, Z. بازنگری در معماری اولیه برای بینایی کامپیوتر. در مجموعه مقالات کنفرانس IEEE در مورد دید کامپیوتری و تشخیص الگو، لاس وگاس، NV، ایالات متحده، 27-30 ژوئن 2016. ص 2818-2826. [ Google Scholar ]
- مولر، آر. کورنبلیت، اس. Hinton، GE چه زمانی صاف کردن برچسب کمک می کند؟ در مجموعه مقالات پیشرفتها در سیستمهای پردازش اطلاعات عصبی، ونکوور، BC، کانادا، 8 تا 14 دسامبر 2019؛ ص 4696-4705. [ Google Scholar ]
- پاسسکه، آ. گراس، اس. چینتالا، اس. چانان، جی. یانگ، ای. دی ویتو، ز. لین، ز. Desmaison، A. آنتیگا، ال. لرر، الف. تمایز خودکار در Pytorch. در مجموعه مقالات NIPS 2017 Autodiff Workshop, Long Beach, CA, USA, 9 دسامبر 2017. [ Google Scholar ]
- وانگچوک، اس. Bolch، T. نقشه برداری از دریاچه های یخچالی با استفاده از داده های Sentinel-1 و Sentinel-2 و طبقه بندی جنگل تصادفی: نقاط قوت و چالش ها. علمی Remote Sens. 2020 , 2 , 100008. [ Google Scholar ] [ CrossRef ]
- دیرشرل، ام. دیتز، ای جی. کنایزل، سی. Kuenzer، C. نقشه برداری خودکار دریاچه های فوق یخبندان قطب جنوب با استفاده از رویکرد یادگیری ماشینی. Remote Sens. 2020 , 12 , 1203. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- وه، جی. کوروپ، او. روسنر، اس. Walz، A. تشخیص طغیان سیل دریاچه های یخچالی هیمالیا از سری زمانی Landsat. سنسور از راه دور محیط. 2018 ، 207 ، 84-97. [ Google Scholar ] [ CrossRef ]
- چانگ، سی سی; Lin, CJ LIBSVM: کتابخانه ای برای ماشین های بردار پشتیبانی. ACM Trans. هوشمند سیستم تکنولوژی (TIST) 2011 ، 2 ، 1-27. [ Google Scholar ] [ CrossRef ]
- Hanshaw، MN; بوهاگن، ب. مناطق یخبندان، مناطق دریاچه، و خطوط برف از 1975 تا 2012: وضعیت Cordillera Vilcanota، از جمله کلاهک یخی Quelccaya، شمال آند مرکزی، پرو. Cryosphere 2014 ، 8 ، 359. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- چن، اف. ژانگ، ام. گوا، اچ. آلن، اس. Kargel، JS; هاریتاشیا، بریتانیا؛ واتسون، مجموعه داده سالانه 30 متری CS برای دریاچه های یخبندان در آسیای کوهستانی مرتفع از سال 2008 تا 2017. 2020. موجود به صورت آنلاین: https://essd.copernicus.org/preprints/essd-2020-57/ (دسترسی در 24 سپتامبر 2020) .
- لی، دی. شانگگوان، دی. موجودی Anjum، MN Glacial Lake برگرفته از Landsat 8 OLI در سالهای 2016-2018 در کریدور اقتصادی چین-پاکستان. ISPRS Int. J. Geo-Inf. 2020 ، 9 ، 294. [ Google Scholar ] [ CrossRef ]
- Sakai, A. ارتباط مختصر: موجودی یخچالهای طبیعی GAMDAM به روز شده در بالای کوهستان آسیا. Cryosphere 2019 ، 13 ، 2043-2049. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- فارکوهارسون، جی. وودز، دبلیو. استرینگام، سی. سنقرمبادی، ن. Riggi، L. صورت فلکی رادار دیافراگم مصنوعی Capella. در مجموعه مقالات دوازدهمین کنفرانس اروپایی رادار دیافراگم مصنوعی (EUSAR 2018)، آخن، آلمان، 4 تا 7 ژوئن 2018؛ صص 1-5. [ Google Scholar ]
- Emmer، A. هریسون، اس. مرگیلی، م. آلن، اس. فری، اچ. Huggel, C. 70 سال تکامل دریاچه و طغیان دریاچه یخبندان سیل در Cordillera Blanca (پرو) و پیامدهای آن برای آینده. ژئومورفولوژی 2020 ، 365 ، 107178. [ Google Scholar ] [ CrossRef ]

شکل 1. بازتاب بالای جو از چهار صحنه مختلف PlanetScope که بر فراز دریاچه Imja Tsho در نزدیکی کوه اورست به دست آمده است. بازتاب بالای اتمسفر (TOA) با ضرب ضرایب داده شده در فایل ابرداده با مقدار تابش 16 بیت محاسبه می شود. اثرات جوی در بازتاب TOA جبران نمی شود. شناسه صحنه تاریخ و زمان دریافت (به UTC) را به همراه شناسه ماهواره نشان می دهد. زمان محلی همراه با شناسه صحنه داده می شود. مقادیر بازتاب برای محاسبه می شود 5×5محله پیکسل مربوط به مکان در دریاچه است. محصول بازتاب سطحی به دلیل مسائل شناخته شده در محاسبه بازتاب سطح بدنه های آبی بازتابنده سطح پایین استفاده نمی شود.
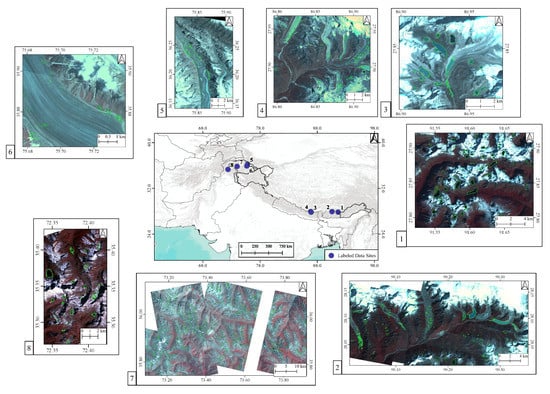
شکل 2. مکان های تصاویر مورد استفاده برای ایجاد مجموعه داده ها روی نقشه پایه ESRI Terrain قرار گرفته اند. چند ضلعی های دیجیتالی در هر مکان در نوارهای FCC 4-3-2 PlanetScope مربوطه نشان داده شده است. جزئیات تصاویر و ناحیه دیجیتالی شده در جدول 1 آورده شده است .
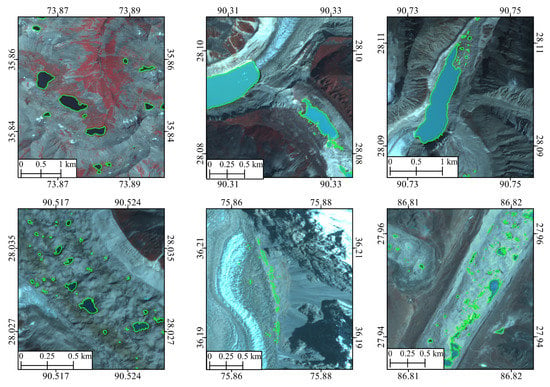
شکل 3. نمونه هایی از دریاچه های دیجیتالی شده (چند ضلعی های سبز) که روی نوارهای FCC مربوطه PlanetScope نشان داده شده اند: 4-3-2.
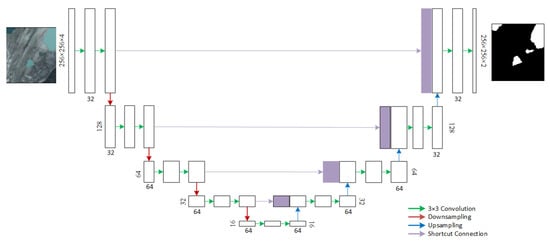
شکل 4. معماری U-Net با لایه های کانولوشن به سبک Visual Geometry Group (VGG). ورودی یک تصویر PlanetScope 4 بانده است. خروجی یک تصویر 2 باندی است که احتمال هر کلاس برای هر پیکسل را در خود دارد. اتصال میانبر برای الحاق فعال سازی از واحدهای رمزگذار با واحدهای رمزگشای مربوطه استفاده می شود.
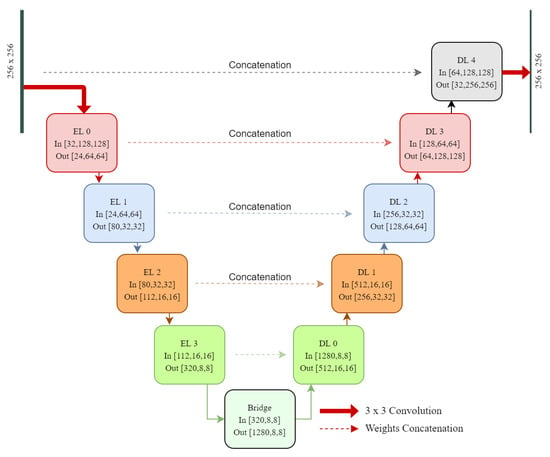
شکل 5. معماری U-Net EfficientNet مورد استفاده برای آموزش و آزمایش. ورودی یک تصویر PlanetScope 4 بانده است. خروجی یک تصویر 2 باندی است که احتمال هر کلاس برای هر پیکسل را در خود دارد. بخش رمزگذار شبکه ها یک شبکه EfficientNet B0 است، در حالی که واحدهای رمزگشا شامل دو شبکه هستند 3×3پیچیدگی ها اولین لایه پیچشی EfficientNet برای ورود تصاویر 4 باندی اصلاح شد. با توجه به تعداد زیاد لایه ها در مدل EfficientNet، یک بلوک دیاگرام ساده شده در اینجا نشان داده شده است.
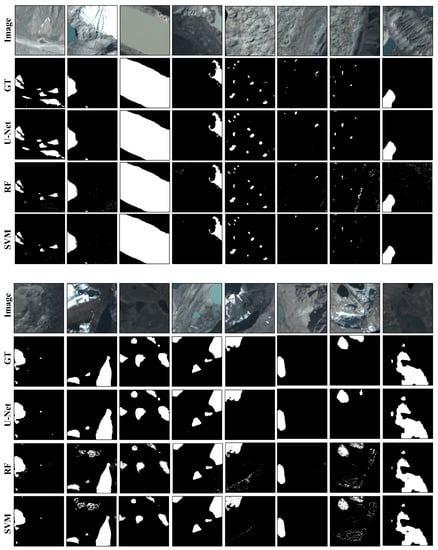
شکل 6. ماسکهای پیشبینیشده از طبقهبندیکنندههای U-Net، RF و SVM همراه با ماسکهای حقیقت زمینی مربوطه برای 16 کاشی (از 1311) دادههای آزمایش نشان داده شدهاند.

شکل 7. تجسم پیکسل های آب پیش بینی شده و مقایسه با داده های برچسب گذاری شده برای نه کاشی از داده های آزمایشی. ( الف ) باندهای FCC PlanetScope 4-3-2. ( ب ) چند ضلعی های پیش بینی شده و برچسب گذاری شده روی PlanetScope FCC. ( ج ) ماسک باینری برچسب دار. ( د ) ماسک باینری پیش بینی شده U-Net. ( ه ) تجسم مثبت های واقعی، منفی های واقعی، مثبت های کاذب و منفی های کاذب.

شکل 8. یخچال بالتورو: ( الف ) تصاویر جهانی ESRI، ( ب ) وسعت یخچال بر اساس فهرست GAMDAM.
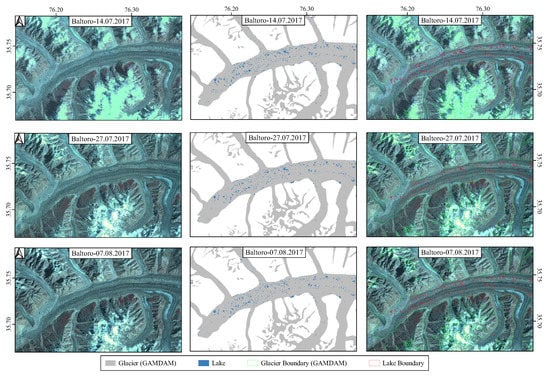
شکل 9. تغییرات درون فصلی در دریاچه های فوق یخبندان در یخچال بالتورو. این تصاویر با حدود. دو هفته اختلاف زمانی دریاچه های یخچالی نقشه برداری شده با استفاده از مدل U-Net در وسط نشان داده شده اند. مرزهای دریاچه در تصاویر PlanetScope ترکیبی رنگ نادرست نمایش داده می شود.
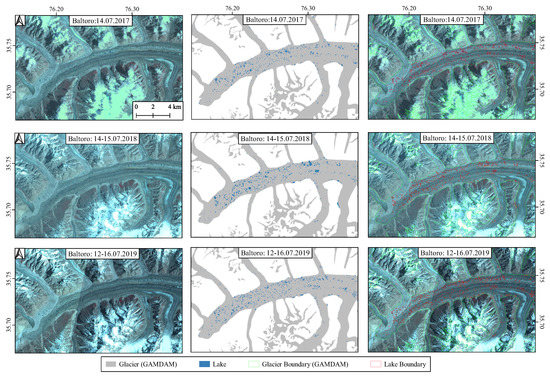
شکل 10. تغییرات سالانه در دریاچه های فوق یخبندان در یخچال بالتورو. این تصاویر با حدود. یک سال اختلاف زمانی دریاچه های یخچالی نقشه برداری شده با استفاده از مدل U-Net در وسط نشان داده شده اند. مرزهای دریاچه در تصاویر FCC PlanetScope نمایش داده می شود.
شکل 11. مقایسه دریاچه های فوق یخبندان نقشه برداری شده با فهرست دریاچه های یخچالی HMA [ 36 ]، پایگاه داده Hi-MAG [ 61 ] و فهرست دریاچه های یخچالی CPEC [ 62 ]. با کمال تعجب، موجودی های Hi-MAG و CPEC دریاچه های فوق یخبندان را در یخچال بالتورو شناسایی نکرده اند. ما نتوانستیم تاریخ دقیق تصاویر استفاده شده توسط موجودی Hi-MAG را برای ایجاد چند ضلعی پیدا کنیم. در این تصویر فقط دریاچه هایی را با مساحت نشان می دهیم >0.01کیلومتر2برای مدل U-Net.
شکل 12. دو ناحیه بر فراز یخچال های طبیعی بالتورو به تفصیل در امتداد اندازه دریاچه ها نشان داده شده است (برای دریاچه های دارای مساحت >0.01کیلومتر2). با در نظر گرفتن عدم قطعیت در برآورد مساحت دریاچه، برخی از این دریاچه ها مساحتی نزدیک به 0.01کیلومتر2، که اغلب به عنوان حداقل منطقه نقشه برداری برای دریاچه های یخچالی استفاده می شود.

شکل 13. مقایسه خطوط کلی از U-Net و GLakeMap [ 56 ]. دادههای PlanetScope و دادههای Sentinel-2 مورد استفاده در اینجا مربوط به 06.11.2017 هستند. این مکان بخشی از مجموعه داده برچسبگذاری شده است که در شکل 2 نشان داده شده است . با این حال، تاریخ تصاویر PlanetScope در داده های نشان داده شده در شکل 2 متفاوت بود .
شکل 14. بالا: محل دریاچه نشان داده شده بر روی باند Sentinel-2 FCC: (11،8،4). صحنه های PlanetScope از چهار تاریخ مختلف به همراه ماسک پیش بینی شده نشان داده شده است. هیستوگرام تغییر سطح دریاچه را نشان می دهد.
شکل 15. بالا: یخچال شیشپر که روی نوارهای FCC Sentinel-2 نشان داده شده است: (11،8،4). مرزهای یخچال از موجودی GAMDAM [ 63 ] برای مرجع نشان داده شده است. صحنه های PlanetScope از چهار تاریخ مختلف به همراه ماسک پیش بینی شده نشان داده شده است. هیستوگرام تغییر سطح دریاچه را نشان می دهد.
شکل 16. برخی از اشتباهات طبقه بندی اشتباه در پیش بینی توسط مدل U-Net مشاهده شد. پیکسل های اطراف ابرها به عنوان پیکسل های آب شناسایی شدند. علاوه بر این، برخی از سایه های ریخته شده نیز همانطور که در تصویر سمت راست نشان داده شده است، به عنوان پیکسل های آب شناسایی شده اند.

شکل 17. نقشه برداری از دریاچه های یخچالی در آند پرو با استفاده از تصاویر PlanetScope و مدل U-Net، که بر روی داده های منطقه هندوکش، قراقورام و هیمالیا (HKKH) آموزش داده شده است. برای مقایسه، دریاچه از Emmer et al. [ 65 ] نیز نشان داده شده است.


بدون دیدگاه