

خلاصه
نقشه برداری زمین شناسی با وضوح بالا یک شرط حمایتی مهم برای اکتشاف مواد معدنی و انرژی است. با این حال، کار نقشه برداری زمین شناسی با وضوح بالا هنوز با مشکلات زیادی مواجه است. در حال حاضر، نقشههای زمینشناسی با وضوح بالا هنوز با تفسیر تخصصی خطوط بررسی، قطبنماها و دادههای میدانی تولید میشوند. کار در این زمینه به دلیل آب و هوا، زمین و پرسنل محدود است و روش های کار باید بهبود یابد. این مقاله روش جدیدی را برای نقشه برداری با وضوح بالا با استفاده از وسیله نقلیه هوایی بدون سرنشین (UAV) و الگوریتم های یادگیری عمیق پیشنهاد می کند. این روش از پهپاد برای جمعآوری تصاویر سنجش از دور با وضوح بالا استفاده میکند، با برخی مقدمات برای لنگر انداختن سنگشناسی همکاری میکند، و سپس اکثر کارهای نقشهبرداری را روی تصاویر سنجش از دور با وضوح بالا تکمیل میکند. این روش مقدار زیادی از کار میدانی را به اتاق منتقل میکند و یک فرآیند نقشهبرداری خودکار بر اساس الگوریتم خوشهبندی خطی تکراری-شبکه عصبی کانولوشنال ساده (SLIC-CNN) ارائه میکند. از شبکه عصبی کانولوشنال (CNN) برای شناسایی محتوای تصویر و تأیید توزیع سنگشناسی استفاده میکند، الگوریتم خوشهای تکراری خطی ساده (SLIC) میتواند برای ترسیم مرز توده سنگ و تعیین رابط تماس توده سنگ استفاده شود. و از روش تصمیم گیری حالت و خبره برای شفاف سازی نتایج حاصل از همجوشی و نقشه برداری استفاده می شود. روش نقشه برداری برای آب نما تایلی در شهر Xingcheng، استان لیائونینگ، چین اعمال شد. در این مطالعه، مساحت زیر منحنی (AUC) روش نقشه برداری 0.937 بود. نتیجه آزمایش کاپا 0.8523 = k بود و یک نقشه زمین شناسی با وضوح بالا به دست آمد.
کلید واژه ها:
بررسی زمین شناسی ; نقشه برداری زمین شناسی ; یادگیری عمیق ؛ SLIC-CNN ; پهپاد ; ناحیه برشی شکل پذیر
1. معرفی
نقشه برداری زمین شناسی بخش مهمی از بررسی های زمین شناسی است. نقشههای زمینشناسی میتوانند اولویتهای کارهای زمینشناسی بعدی را مشخص کرده و ضایعات منابع را کاهش دهند. با این حال، نقشه برداری نقشه های زمین شناسی با وضوح بالا یک چالش بزرگ است، به ویژه در مناطق صعب العبور، که مستلزم هزینه های انسانی و مادی زیادی است [ 1 ، 2 ، 3 ، 4 ، 5 ، 6 .]. زمین های دشوار و جزر و مد، توسعه بررسی های زمین شناسی سنتی را محدود کرده است. در چین، متداول ترین روش نقشه برداری در مقیاس بزرگ هنوز هم بررسی زمین شناسی سنتی است. چگونگی خودکارسازی بیشتر بررسیهای زمینشناسی همیشه یک کانون تحقیقاتی بوده است. برای حل مشکل دشوار اتوماسیون نقشه برداری زمین شناسی، باید به دو موضوع زیر توجه شود.
دادهها: بسیاری از محققان نتایج رضایتبخشی در استفاده از طبقهبندیهای نظارت شده و بدون نظارت تصاویر ماهوارهای با وضوح متوسط و بالا [ 7 ] به دست آوردهاند، و کار تفسیر زمینشناسی سنتی را میتوان با وضوح پایین انجام داد. نقشه برداری زمین شناسی با وضوح بالا باید بر اساس تفسیر و طبقه بندی تصاویر سنجش از دور با وضوح بالا باشد. با این حال، طبقه بندی سنتی سنگ شناسی بیشتر به داده های تصویر چند طیفی وابسته است [ 8 ، 9 ، 10 ]، و روش های طبقه بندی سنتی در مقیاس های بزرگ عملکرد خوبی ندارند.
در سال های اخیر، هزینه وسایل نقلیه هوایی بدون سرنشین روتور سبک وزن (UAV) کمتر شده است. پهپاد به عنوان یک پلتفرم جمعآوری تصویر راحت و بسیار خودکار، میتواند مشکل جمعآوری خودکار دادهها را حل کند. با این حال، پهپاد نقش خود را به طور کامل در بررسی های زمین شناسی، به ویژه در چین، ایفا نکرده است.
شناسایی: شناسایی سنگ شناسی بخش مهمی از کار بررسی زمین شناسی است. تشخیص سنگ شناسی مشابه تحقیقات تشخیص تصویر است، اما تفاوت هایی نیز وجود دارد. سنگ های سطحی اغلب شکل ثابتی ندارند و شناسایی سنگ ها عمدتاً باید بر اطلاعات رنگ و بافت تکیه کند [ 11 ، 12 ]. وضوح تصویر بهبود یافته است، جزئیات اشیاء سطحی فراوان تر است، و ویژگی های آنها به طور فزاینده ای پیچیده تر می شود [ 13 ]. همه اینها شناسایی را دشوار می کند.
به منظور بهبود تشخیص و دقت طبقه بندی اشیاء سطحی، بسیاری از محققان تلاش کرده اند تا الگوریتم های یادگیری ماشین را در علوم زمین معرفی کنند. مدل الگوریتم یادگیری ماشین بر روی دادههای خاص آموزش داده میشود تا مدلی تعمیمیافتهتر به دست آورد، که میتواند اطلاعات ویژگیهای سنگ، ساختار و غیره را خلاصه کند و بدیهی است که میتواند دقت تشخیص geo-sense را در وضوح بالا بهبود بخشد. تصاویر [ 14 ، 15 ، 16 ، 17]. با این حال، روش مبتنی بر تشخیص محتوا نمیتواند موقعیت لبه شی شناسایی را دقیقاً تعیین کند، که مانع استفاده از بسیاری از الگوریتمهای تشخیص در زمینه طبقهبندی تصاویر با وضوح بالا میشود. AlexNet و سایر شبکههای عصبی تقریباً همگی پردازش متا دادهها، چرخش، آشفتگی و غیره را برای افزایش دقت تشخیص اتخاذ میکنند [ 18 ، 19 ، 20 ، 21 ، 22 ، 23 ، 24 ، 25 ، 26 ، 28 ،]. اگرچه این روش دقت تشخیص را افزایش میدهد، اما باعث میشود که الگوریتم درک خود از مکان شی شناسایی را از دست بدهد. در زمینه زمین شناسی، تعیین محل مرزهای سنگ و پدیده های زمین ساختی برای تحقیقات زمین شناسی بسیار مهم است [ 29 ، 30 ، 31 ، 32 ].]. یادگیری ماشین، مانند شبکههای کاملاً کانولوشنال (FCN)، میتواند لبههای یک شی را در حین شناسایی آن تشخیص دهد. با این حال، محدود شده توسط طراحی الگوریتم، FCN به طور مستقیم نتایج محاسبات را از نقشه ویژگی جدا می کند، بنابراین جزئیات تقسیم لبه اشیاء شکل پیچیده رضایت بخش نیست. بنابراین، جداسازی فرآیند تشخیص هدف از فرآیند تقسیمبندی، روش رایجتری برای بهبود دقت تشخیص و دقت تقسیم لبه است [ 30 ، 33 ، 34 ، 35 ، 36 ].
با این حال، برای یک الگوریتم منفرد تعیین مرز محتوا تحت فرض شناسایی صحیح محتوا بسیار دشوار است [ 30 ، 33 ، 34 ، 36]. در پاسخ به این مشکل، تیم ما با استفاده از الگوریتم شبکه عصبی کانولوشنال برای شناسایی محتوای تصویر و تایید توزیع سنگشناسی، الگوریتم خوشهبندی تکراری خطی ساده-شبکه عصبی کانولوشن (SLIC-CNN) را برای کار نقشهبرداری با وضوح بالا پیشنهاد کرد. الگوریتم SLIC برای ترسیم مرزهای توده سنگ و شفاف سازی بیشتر رابط تماس توده سنگ استفاده می شود. روش اکثریت و تصمیم گیری تخصصی برای شفاف سازی بیشتر مرزها و تولید نتایج نقشه برداری استفاده می شود. تیم ما یک آزمایش نقشه برداری با وضوح بالا در ساحل Taili در شهر Xingcheng، استان لیائونینگ، چین انجام داد.
2. تنظیمات زمین شناسی
زیرزمین آرکئن کراتون شمال چین شرقی (NCC) شامل قدیمی ترین سنگ های چین است (تا حدود 3.8 گا) [ 37 ]. رسوب رسوب عمدتاً در طول پروتروزوییک میانی تا اواخر [ 38 ، 39 ، 40 ] رخ داده است. منطقه مورد مطالعه از نظر جغرافیایی در منطقه Xingcheng-Taili در استان لیائونینگ غربی در شمال شرقی چین ( شکل 1 a) و از نظر تکتونیکی در بخش شرقی حاشیه شمالی NCC قرار دارد. در رابطه با پارچه های تغییر شکل آن نقشه برداری و به تفصیل بررسی شد [ 41 ]. یک نقشه زمین شناسی کمی ساده شده از منطقه مورد مطالعه در شکل 1 ب نشان داده شده است.
این منطقه عمدتاً از سه سوئیت گرانیتی ( شکل 1 ب) تشکیل شده است که به ترتیب در دوران نئوآرکه، تریاس پسین و ژوراسیک پسین تشکیل شده اند و همچنین با الگوهای تغییر شکل متغیر مشخص می شوند ( شکل 1 ب). این مجموعههای گرانیتی به شرح زیر توصیف میشوند: (1) سنگهای گرانیتی نئوآرکه به طور سنتی به عنوان “گرانیت Suizhong” نامیده میشوند، که نمایانگر اجزای تروندجمیت-تونالیت-گرانودیوریت آرکئن (TTG)، با سن تشکیل حدوداً میباشد. 2.5 Ga از زیرزمین NCC; (2) سنگهای گرانیتی تریاس (حدود 220 میلیون سال)، از جمله اورتوگنیس پورفیری، آپلیت گرانیتی حاوی گارنت، و بیوتیت-سینوگرانیت، در گنیسهای نئوآرکه نفوذ کردهاند ( شکل 1 ب) [ 37]؛ و (3) آداملیت های بیوتیت با سن U-Pb زیرکون حدود. 150Ma به ترتیب یک ساختار عظیم در جنوب و یک ساختار گنیسیک در شمال را نشان می دهد ( شکل 1 ب). ناحیه برشی شکل پذیر ناحیه تایلی عمدتاً از سنگ های گرانیتی تشکیل شده است که در شرایط دگرگونی درجه پایین تا متوسط تغییر شکل داده اند که توسط لیانگ و همکارانش ثبت شده است. [ 39 ، 40 ، 41 ].
با این حال، در منطقه طیلی، هنوز مشکلات زمین شناسی زیادی وجود دارد که باید حل شود. با این حال، کار پیشینیان عمدتاً بر سنگ شناسی، ژئوشیمی و گاهشماری توده سنگ متمرکز شده است [ 42 ]. رخنمون های اصلی سنگ در ناحیه تایلی در ناحیه جزر و مدی قرار دارند ( شکل 1 ج). ما تنها میتوانیم رخنمونهای صخرهای را در حدود 3 ساعت در زمان جزر مشاهده کنیم و ترسیم نقشههای زمینشناسی با وضوح بالا از این منطقه با استفاده از روشهای سنتی بررسی زمینشناسی تقریبا غیرممکن است که تحقیقات در این منطقه را پراکندهتر کرده است. بنابراین، ساختن نقشه های زمین شناسی با وضوح بالا با کیفیت بالا برای یکسان سازی درک زمین شناسی در مورد تکامل NCC اهمیت عمیقی دارد [ 41 ]]. این مطالعه با هدف استفاده از پهپادها و الگوریتمهای هوش مصنوعی برای ارائه روشی سریع برای ترسیم اسکیسهای زمینشناسی انجام شد. با کمک داده های زمین شناسی موجود در این منطقه، صحت روش را نیز می توان به راحتی تأیید کرد [ 37 ، 38 ، 39 ، 40 ، 41 ، 42 ].
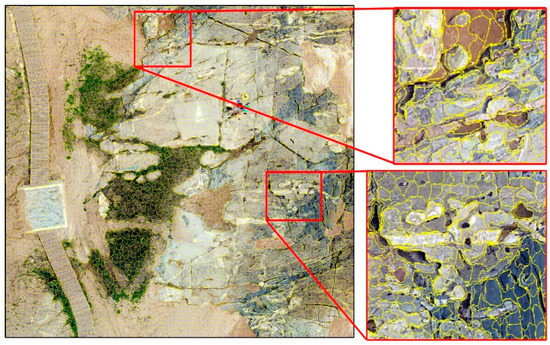
از سال 2004، زمین شناسان کالج علوم زمین دانشگاه جیلین، بررسی های میدانی و اندازه گیری ساختارهای سنگ شناسی با وضوح بالا را در سری سنگ های زیرزمینی کریستالی دگرگونی پرکامبرین که در منطقه Xingcheng، لیائونینگ غربی در معرض دید قرار گرفته اند، انجام داده اند. مشخص شد که رابطه بین سنگشناسیهای مختلف در سری سنگهای دگرگونی در این ناحیه پیچیده است، تحت تغییر شکل تکتونیکی بیش از حد، و همچنین تغییرات متعدد با درجات مختلف دگرگونی و ماگما. از طریق سنگشناسی صحرایی و داخلی، تاریخگذاری زیرکون U-Pb و سایر کارهای تحقیقاتی، توالی تشکیل سنگهای اصلی در این ناحیه به دست آمد: ① کوارتز دیوریتی گنیس 2510 Ma ± 7 Ma ( شکل 2 C). ② میلونیت 216.44 Ma ± 0.5 Ma ( شکل 2E)؛ ③ رگه های پگماتیت ( شکل 2 D). و ④ گرانیت حاوی بیوتیت ( شکل 2 B). شناسایی سنگ های در معرض در این منطقه نسبتا راحت است و لبه های تماس توده های سنگی واضح است که مواد خوبی برای تحقیقات تشخیص تصویر سنگ شناسی فراهم می کند.
3. داده ها
3.1. انتخاب داده ها
این مطالعه از دادههای تصویر معمولی آبی قرمز سبز (RGB) جمعآوریشده توسط یک وسیله نقلیه هوایی بدون سرنشین (UAV) به عنوان دادههای پایه برای طبقهبندی استفاده کرد. دو دلیل وجود دارد: اول اینکه تصاویر RGB معمولی راحتتر به دست میآیند و هزینه پایینتر است که برای ترویج محبوبیت پهپادها در نقشهبرداری زمینشناسی مهمتر است. در مرحله دوم، پهپاد می تواند تصاویر RGB با وضوح فوق العاده بگیرد. اگرچه وضوح طیفی ضعیف است، اطلاعات بافت غنی آن می تواند به عنوان یک پارامتر مهم استفاده شود. وضوح فضایی در مقیاس میلی متری می تواند به کارگران زمین شناسی تجربه مشاهده با چشم غیر مسلح در فاصله 0.5 متری را ارائه دهد. کار بعدی همچنین ثابت کرد که استفاده از تصاویر رنگی با وضوح فوق العاده، همراه با داده های حقیقت زمینی در میدان، به دقت تشخیص رضایت بخشی در بسیاری از سناریوها دست یافت.
ما از یک پهپاد DJI Phantom 4 Pro با CMOS 1 اینچی برای طی کردن یک مسیر S شکل در حدود 30 متر از زمین استفاده کردیم. میزان تکرار مسیر 80 درصد و میزان تکرار تصاویر 90 درصد بوده است. نقاط کنترل زمینی با استفاده از سیستم های GNSS یکپارچه Trimble R2 مبتنی بر زمان واقعی سینماتیک (RTK) اندازه گیری شد. پس از موزاییک کردن و تصحیح تصاویر، تصویر ارتوی با وضوح بالا از ناحیه توسط Pix4D به دست آمد. وضوح فضایی تصویر حدود 1.3 سانتی متر بود.
3.2. پیش پردازش داده ها
یادگیری ماشینی مزیت بسیار آشکاری نسبت به الگوریتم سنتی در زمینه تشخیص الگو دارد [ 43 ، 44 ، 45 ]، اما الگوریتم های یادگیری ماشین عموماً نیاز دارند که شکل داده های آموزشی مرتب باشد [ 46 ]]. برای معرفی الگوریتم یادگیری ماشین به نقشه برداری با وضوح بالا، از یک روش برش برای ارائه داده های منبع با اندازه استاندارد برای الگوریتم های یادگیری ماشین استفاده کردیم. کار برای تعیین اندازه برش باید در ارتباط با دقت تفسیر زمین شناسی در نظر گرفته شود. به عنوان مثال، نیاز به نقشه برداری زمین شناسی 1:5000 مستلزم انعکاس رگه سنگی با عرض 0.5 متر بر روی سطح است و لازم است رگه هایی با عرض 0.5 متر یا کمتر شناسایی شوند. در این مطالعه، یک برش 32 × 32 پیکسل با وضوح نمونه گیری تقریبا 0.35 متر استفاده شد.
کار تفسیر جغرافیایی نه تنها باید بداند هدف تفسیر چیست، بلکه باید بداند شی کجاست، و تفسیر شی بدون اطلاعات جغرافیایی فایده ای ندارد [ 34 ]. بنابراین، علاوه بر کار تفسیر زمین شناسی، نیاز به ژئوکدگذاری موضوع تفسیر نیز داشتیم. کدگذاری جغرافیایی به یک شناسه منحصر به فرد برای مطابقت با موقعیت جغرافیایی نیاز دارد که در الگوریتم های تشخیص تصویر قبلی در نظر گرفته نشده بود. به منظور تسهیل تحقق سایر توابع در آینده، ما geocoding را به عنوان یک ماژول عملکردی جدا کردیم، یک سرور ترجمه زمین به تفسیر مبتنی بر WebService ایجاد کردیم و از MySQL برای ذخیره شناسه و موقعیت جغرافیایی متناظر هر نقطه استفاده کردیم.
برای نزدیکتر شدن به شرایط واقعی کار، این مطالعه محتوای غیر مرتبط با زمینشناسی مانند گردشگران، قایقهای تفریحی، پوشش گیاهی، ساختمانها و غیره را حذف نکرد، بلکه آنها را به صورت جداگانه طبقهبندی کرد. ما امیدواریم که توانایی مدل برای تشخیص “اشیاء خارجی” را در طول آموزش مدل طبقهبندی افزایش دهیم و دقت تعمیم و طبقهبندی را در برنامههای آینده بهبود دهیم. بر اساس شرایط زمین در منطقه مورد مطالعه، این مطالعه تعداد تفسیرها را 7 مورد تعیین کرد.
منطقه تأیید تقریباً 50 × 50 متر بود و تصویر با وضوح بالا دارای وضوح فضایی تقریباً 1.3 سانتی متر است. در مجموع 13432 برش برش داده شد که هر کدام با اندازه پیکسل 32 × 32 پیکسل و سطح طرح ریزی کف تقریباً 0.18 متر مربع بود. ما تصاویر با وضوح بالا از برش ها را به دو گروه تقسیم کردیم، یعنی گروه آموزشی و گروه تایید. مقدار هر دسته در هر گروه در جدول 1 نشان داده شده است . پس از گروهبندی، تصاویر و برچسبهای طبقهبندی به صورت آرایههای چند بعدی uint8 قالببندی شدند و با استفاده از ماژول pickle برای تسهیل خواندن آموزش شبکههای عصبی، سریالسازی شدند.
در این تحقیق تعداد نمونه های آموزشی با توجه به پراکندگی ویژگی ها در منطقه مورد مطالعه 600 نفر تعیین شد. به جز «Sundries»، «boardwalk» و «Granite Dykes»، تعداد نمونههای آموزشی همه ویژگیهای دیگر کمتر از تعداد نمونههای تأیید بود. شایان ذکر است که نمونههای آموزشی و راستیآزمایی بهطور تصادفی از «منطقه راستیآزمایی» گرفته شده و مساحت آنها تنها 8/1 مساحت منطقه مورد مطالعه بوده است. این بدان معناست که تعداد نمونه های آموزشی، تعداد نمونه های اعتبار سنجی و تعداد اشیاء مورد استفاده برای طبقه بندی حدود 1:3:32 بوده است.
4. روش
4.1. هدف اصلی SLIC-CNN
در سالهای اخیر، یادگیری عمیق، که به عنوان شبکه عصبی عمیق نیز شناخته میشود، توجه محققان را از همه زمینهها به خود جلب کرده است [ 44 ، 45 ]. تعداد زیادی روش در مورد یادگیری عمیق پیشنهاد شده است. یک معماری شبکه عصبی عمیق معمولی شامل یک شبکه باور عمیق (DBN) [ 46 ]، CNN و رمزگذار خودکار [ 25 ] و غیره است. از جمله، پس از اولین طراحی و بهینه سازی LeCun و همکاران. [ 47 ] در سال 1998، عملکرد CNN عمیق افزایش یافته است. در سال 2015، دقت طبقه بندی CNN در کلاس 1000 مجموعه داده ImageNet از انسان پیشی گرفت [ 47 ]] که شامل 1200000 تصویر آموزشی، 50000 تصویر تایید و 10000 تصویر تست می باشد. CNN اغلب برای پردازش سیگنال های پیچیده مانند بینایی کامپیوتری طراحی شده است. برتری خود را در مقایسه با سایر فناوری ها نشان داده است [ 48 ]. CNN به طور گسترده در طبقه بندی تصاویر، تشخیص گفتار، تشخیص علائم ترافیکی، تجزیه و تحلیل تصویر پزشکی و سایر کاربردها استفاده می شود [ 49 ]. این تکنیک موثر همچنین برای طبقه بندی تصاویر سنجش از دور با وضوح بالا و با وضوح متوسط [ 43 ، 44 ، 45 ، 46 ] اعمال می شود.]. با تحقیقات بیشتر و بیشتر در مورد CNN، تعداد CNN های بهبود یافته به طور آشکار افزایش یافته است. آنها نقش مهمی فزاینده ای در زمینه های مختلف ایفا می کنند [ 50 ، 51 ، 52 ]. یادگیری عمیق همچنین برای شناسایی خودکار انواع زمین در این زمینه بسیار مناسب است زیرا انتخاب ویژگی مورد نیاز نیست.
به عنوان بخش مهم دیگری از یادگیری عمیق، دقت فناوری تقسیم بندی معنایی را نمی توان با تشخیص الگو مقایسه کرد. یادگیری ماشینی، مانند شبکههای کاملاً کانولوشنال (FCN)، میتواند لبههای یک شی را در حین تشخیص آن تشخیص دهد. با این حال، به دلیل محدودیت طراحی الگوریتم، FCN مستقیماً نتایج محاسباتی نقشه ویژگی را جدا میکند، بنابراین جزئیات تقسیم لبه اشیاء پیچیدهشکل رضایتبخش نیست.
از تحقیقات اخیر، جداسازی فرآیند تشخیص هدف از فرآیند تقسیمبندی، روش رایجتری برای بهبود دقت تشخیص و تقسیمبندی لبه است [ 30 ، 33 ، 34 ، 35 ، 36 ]. این نه تنها کارایی محاسبات را بهبود می بخشد، بلکه محققان را برای بهینه سازی تشخیص و تقسیم بندی به ترتیب تسهیل می کند.
سوپرپیکسل یک راه حل موثر تقسیم بندی است. این تصویر را به یک سری از مناطق فرعی تقسیم می کند. هر زیر منطقه دارای ویژگی خاصی در بین خود است و از سازگاری قوی برخوردار است. الگوریتمهای تقسیمبندی سوپرپیکسل نیز بیشتر بر اساس پارتیشن بندی فضای رنگی هستند و به معنای طبقهبندی واقعی اهمیتی نمیدهند. الگوریتم تقسیم بندی سوپرپیکسل SLIC [ 53 ، 54] یک نمایش معمولی از این نوع الگوریتم است. SLIC فاصله پیکسل ها را در زیرمنطقه تصویر در فضای رنگی کمیسیون بین المللی فضای رنگی آزمایشگاه روشنایی (CIELAB) جستجو می کند تا مشخص کند کدام پیکسل ها باید در یک منطقه سوپرپیکسل دسته بندی شوند. سرعت پردازش و کارایی ذخیرهسازی الگوریتم نسبت به سایر الگوریتمهای تقسیمبندی سوپرپیکسلی برتری دارد و مرز بهدستآمده وابستگی زیادی به مرز اصلی تصویر دارد.
SLIC یا سایر تکنیکهای تقسیمبندی به روشهای مهمی برای تقسیم لبه تبدیل شدهاند [ 55 ، 56 ]. با این حال، الگوریتمهایی مانند الگوریتم تکنیک تحلیل دادههای خودسازماندهی تکراری (ISODATA)، میانگین k و سوپرپیکسل، همگی از اطلاعات رنگی به عنوان پارامترهای خوشهبندی استفاده میکنند. آنچه در داخل منطقه خوشه بندی است بر نتایج خوشه بندی تأثیر نمی گذارد. با این حال، مزیت الگوریتم های یادگیری عمیق در تعیین اینکه یک شی چیست. تشخیص موقعیت مکانی اشیاء به ویژه برای نقشه برداری خودکار زمین شناسی مهم است. بنابراین، آیا روشی برای رفع نیازهای تشخیص تصویر و موقعیت یابی فضایی وجود دارد؟ این هدف اصلی الگوریتم SLIC-CNN است.
4.2. ساختار SLIC-CNN
این در شکل 3 نشان داده شده است . در مقایسه با CNN و روشهای طبقهبندی خوشهبندی سنتی، SLIC-CNN تشخیص لبه را از تشخیص شی جدا میکند و آنها را جداگانه بهینه میکند، که میتواند از نظر تئوری نتایج پردازش تصویر را بهینه کند. طراحی موازی فرآیندهای تشخیص لبه و تشخیص شی نیز از نظر تئوری کارایی الگوریتم را بهبود می بخشد.
شکل 4استفاده از فناوری مربوط به پهپاد توسط تیم ما در کار نقشه برداری زمین شناسی سنتی را نشان می دهد. همانطور که در شکل نشان داده شده است، قبل از نقشه برداری زمین شناسی، در مرحله جمع آوری داده ها، بر اساس نقشه های توپوگرافی موجود و تصاویر ماهواره ای، می توان با استفاده از پهپاد، عکس رخنمون زمین شناسی و توپوگرافی منطقه مورد نظر را به سرعت بدست آورد. هدف اصلی شناسایی میدانی تعیین لیتولوژی و مکان معمولی در منطقه و ارائه کنترل محتوا برای الگوریتم های نقشه برداری خودکار است. الگوریتم نگاشت خودکار مبتنی بر SLIC-CNN در کادر چین دار در شکل نشان داده شده است و نتایج نگاشت خودکار حاصل هنوز نیاز به استفاده از بازرسی و تأیید کار میدانی دارد. به منظور تسهیل مقایسه تصاویر سنجش از دور و شرایط واقعی، ما از یک تلفن هوشمند و برنامه OruxMaps برای ثبت سنگ شناسی معمولی زمین به عنوان نمونه سنگ شناسی استفاده کردیم. در مجموع 74 نمونه حقیقت زمین در منطقه مورد مطالعه برای کالیبراسیون سنگ شناسی جمع آوری شد.شکل 2 الف).
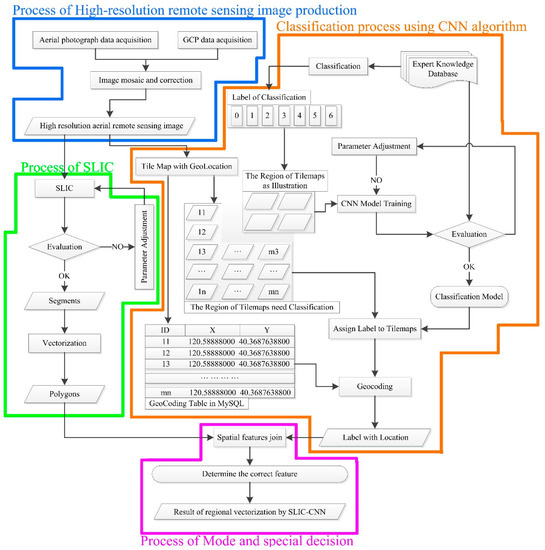
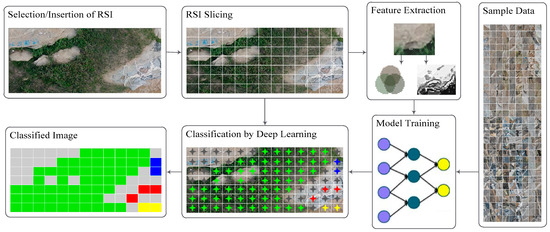
شکل 5 روش SLIC-CNN را در فرآیند نقشه برداری زمین شناسی با وضوح بالا به تفصیل شرح می دهد. در شکل 5 ، چهار جعبه چند ضلعی در چهار رنگ ترسیم شده است که نشان دهنده چهار بخش اصلی روش SLIC-CNN است. ناحیه آبی نشان دهنده تولید تصاویر عکسبرداری هوایی با وضوح بالا از پهپادها و ناحیه نارنجی نشان دهنده فرآیند آموزش شبکه عصبی کانولوشن و طبقه بندی با استفاده از برش های تصویر با وضوح بالا است. ناحیه سبز نشان دهنده فرآیند الگوریتم طبقه بندی سوپرپیکسل SLIC است که تقسیم لبه را در منطقه مورد مطالعه انجام می دهد. ناحیه بنفش نشان دهنده فرآیند استفاده از حالت و تصمیمات ویژه برای ترکیب محتوای شناسایی CNN با لبه شناسایی SLIC است.
در جزئیات، پس از به دست آوردن یک تصویر با وضوح بالا، برش تصویر ضروری است. این آزمایش از دادههای بردار شبکه ماهیگیری ArcGIS برای برش دستهای ماسک استفاده میکند، به طوری که موقعیت مکانی هر برش میتواند یکی یکی با ماسک برداری مطابقت داشته باشد، که برای کدگذاری جغرافیایی نتایج تشخیص تصویر نیز مناسب است. مدل CNN با استفاده از چارچوب TensorFlow-python ساخته شده است که از AlexNet بهبود یافته است. الگوریتم SLIC نیز با پایتون نوشته شده است و کد مربوطه در github آپلود شده است. در نهایت، کتابخانه Python ArcGIS برای اتصال نتایج طبقهبندی SLIC و CNN در فضای جغرافیایی مورد استفاده قرار گرفت و برشها بر اساس اصل حالت مقادیر اختصاص یافتند.
4.3. یادگیری عمیق SLIC-CNN
ما یک شبکه یادگیری ماشینی را مدلسازی کردیم که از AlexNet الگوبرداری شده بود. پارامترهای اصلی مانند شکل 6 هستند.
این شبکه شامل شش لایه وزنی است: چهار لایه اول لایه های کانولوشن هستند، بنابراین گاهی اوقات به آن شبکه های عصبی کانولوشن (CNN) نیز می گویند و سه لایه باقیمانده لایه های کاملاً متصل هستند. خروجی آخرین لایه اتصال کامل به یک لایه SoftMax 7 طرفه ارسال می شود که توزیعی را تولید می کند که 7 نوع برچسب را پوشش می دهد. Softmax تابعی است که برای تبدیل نتیجه امتیاز به احتمال استفاده می شود که برای محاسبه احتمال و کاهش گرادیان مناسب است. شبکه ما هدف رگرسیون لجستیک چند کلاسه را به حداکثر میرساند، که معادل به حداکثر رساندن میانگین احتمال لگاریتمی برچسبهای صحیح در نمونه آموزشی تحت توزیع پیشبینیشده است.
هسته لایه کانولوشنال اخیر به تمام نقشه های هسته در لایه کانولوشن قبلی متصل است. نورون های لایه کاملا متصل به تمام نورون های لایه قبلی متصل هستند. لایه نرمال شده با پاسخ از لایه های کانولوشنی اول و دوم پیروی می کند. لایه ادغام از لایه نرمال شده و لایه کانولوشن چهارم پیروی می کند.
اولین لایه کانولوشن از 64 هسته با اندازه 3 × 5 × 5 و یک گام 1 پیکسلی برای فیلتر کردن داده های ورودی با اندازه 3 × 32 × 32 استفاده می کند. گام فاصله بین مراکز میدان پذیرنده نورون همسایه در همان نقشه هسته است. لایه کانولوشن دوم باید خروجی اولین لایه کانولوشن (پاسخ نرمال شده و جمع شده) را به عنوان ورودی خود بگیرد و آن را با 64 هسته در اندازه 64 × 5 × 5 فیلتر کند. سومین لایه کانولوشن دارای 64 هسته در اندازه 64 × 3 × 3 است که به خروجی (پیچیده، ادغام شده) لایه کانولوشن دوم متصل است. لایه پیچ چهارم دارای 64 هسته در اندازه 64 × 3 × 3 است. اولین لایه متصل کامل دارای 512 نورون و دومی دارای 256 نورون است و هر لایه متصل کامل از Dropout برای تضمین تعمیم مدل استفاده می کند.
در این مطالعه، CNN عمدتاً برای تشخیص اشیاء زمینی استفاده شد. هدف این بود که برش هایی از تصاویر با وضوح بالا را به هفت دسته از پیش تعریف شده تقسیم بندی کنیم. با این حال، این روش طبقه بندی سطح برش ها نمی تواند به طور دقیق لبه ویژگی را تعیین کند ( شکل 7 ). برای حل این مشکل، ما یک روش طبقهبندی سوپرپیکسل را در فرآیند نقشهبرداری با وضوح بالا معرفی کردیم.
4.4. سوپرپیکسل SLIC-CNN
الگوریتم SLIC عمدتاً از الگوریتم خوشه بندی K-means برای پردازش سوپرپیکسل ها استفاده می کند. اندازهگیری فاصله در الگوریتم خوشهبندی نه تنها شامل فاصله رنگی فضای رنگی است، بلکه فاصله اقلیدسی مختصات پیکسل را نیز شامل میشود. بنابراین، نقطه مرکزی خوشه K-means از بردارهای پنج بعدی تشکیل شده است. این شامل ضبط پیکسل ها در فضای رنگ آزمایشگاهی و مختصات XY پیکسل است. از آنجایی که مختصات XY را نمی توان مستقیماً با فضای رنگ محاسبه کرد، یک پارامتر فشردگی اضافه می شود [ 57 ، 58 ].
علاوه بر این، پس از خوشهبندی K-means، یک فرآیند کانولوشن نیز برای ادغام پیکسلهای مستقل محصور شده توسط یک منطقه در یک کلاس خاص مورد نیاز است. پارامتر K مرکز خوشه برای نشان دادن تعداد نتایج تقسیم بندی استفاده می شود. بهینه سازی این پارامترها باید در ترکیب با پیچیدگی شرایط زمین شناسی و دقت نقشه برداری در نظر گرفته شود. پس از آزمایشهای فراوان، تیم ما بر این باور است که تعداد بخشها در الگوریتم SLIC باید ابتدا روی یک مقدار مناسب تنظیم شود، به طوری که فاصله مرکز خوشه اولیه الگوریتم SLIC تقریباً برابر با اندازه گام برش آموزشی CNN باشد. اگر تعداد بخشها خیلی زیاد باشد و تقسیمبندی تصویر خیلی خوب باشد، میتواند نتایج بهتری برای تقسیمبندی شی و تشخیص لبه به دست آورد. اما باعث می شود که بسیاری از مناطق با نتیجه طبقه بندی مطابقت نداشته باشند. اگر این عدد خیلی کوچک باشد، منجر به تعداد کمی قطعه می شود، اگرچه می تواند ظاهر مناطق را بدون نتایج طبقه بندی مربوطه کاهش دهد، اما اثر برازش لبه ضعیف است (شکل 8 ). مشاهده میشود که وقتی مرحله مرکز خوشهبندی SLIC ≈ طول گام برش CNN، تعداد کمی نقشه از دست رفته وجود دارد، منطقه تقسیمبندی SLIC تقریباً برابر با اندازه پنجره تقسیمبندی CNN است و تطبیق لبه بهتر است. هنگامی که مرحله مرکز خوشه بندی SLIC >> اندازه گام برش CNN است، اگرچه تقریباً هیچ نقطه ای از نقشه گم نشده است، تعداد بخش بسیار کوچک است، و لبه نقطه بسیار ناقص است. وقتی اندازه گام مرکز خوشه بندی SLIC << طول برش CNN باشد، تعداد بخش بیشتر است و برازش لبه بهتر است. با این حال، نقاط بیشتری از دست رفته است.
هنگام استفاده از الگوریتم SLIC و پارامترهای مناسب، می توانیم نتایج رضایت بخش تری از پارتیشن بندی لبه به دست آوریم. بر اساس تقسیم لبه، ما نتایج تشخیص محتوا یادگیری ماشین را ترکیب کردیم تا از نظر تئوری نتایج طبقهبندی لبههای دقیق و محتوای دقیق را بهدست آوریم. با این حال، هنوز برخی از مشکلات تطبیق محتوا و دامنه وجود دارد که باید حل شوند. تیم ما یک روش “حالت و تصمیم خاص” را برای حل این مسائل توپولوژیکی پیشنهاد کرده است.
4.5. حالت و تصمیم ویژه SLIC-CNN
برای تصویر بخشبندی شده، نحوه اختصاص دادن هر بخش به برچسب بهدستآمده توسط یادگیری عمیق نیاز به بررسی دقیق دارد. استفاده ساده از برچسب های CNN برای اختصاص بخش های SLIC کافی نیست. مخصوصاً در مناطقی با شرایط پیچیده زمین شناسی، ما باید محتاط باشیم. برای کار نقشه برداری زمین شناسی، بسیاری از بخش های کوچک اهمیت زمین شناسی مهمی مانند دایک ها و نفوذها دارند. الگوریتم تقسیمبندی سوپرپیکسلی میتواند پارامترها را برای بخشبندی این اجسام زمینشناسی ظریف تا حد امکان تنظیم کند. با این حال، الگوریتم یادگیری عمقی نرخ نمونه گیری را به طور نامحدود افزایش نمی دهد. تحقیقات ما نشان میدهد که دقت پیشبینی زمانی که وضوح پیکسل هدف شناسایی از 64 پیکسل، 32 پیکسل، به 16 پیکسل باشد، بسیار کاهش مییابد. حتی در وضوح 64 پیکسل، با در نظر گرفتن این مقاله به عنوان مثال، مرحله نمونه برداری مربوطه روی زمین به 7 سانتی متر می رسد. هنوز شکاف های زیادی از مشخصات نقشه برداری با وضوح بالا که توسط چین اعلام شده وجود دارد (رگه هایی با عرض بیش از 5 سانتی متر باید شناسایی شوند). بنابراین، جداسازی بخشهای ریز از پسزمینه و دستیابی به برچسبهای با کیفیت خوب باید در نظر گرفته شود. در پاسخ به این موضوع، تیم ما روشی به نام «حالت و تصمیم ویژه» را برای حل این مشکل پیشنهاد کرد.
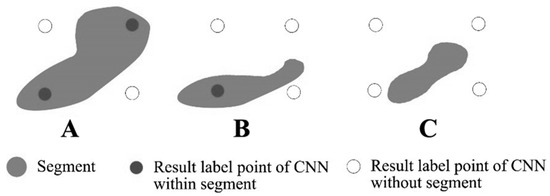
منظور از حالت و تصمیم خاص استفاده از طرح های تصمیم گیری مختلف برای تعریف محتوای هدف برای موقعیت های مختلف است. حالت در اینجا به تگ متداول در محدوده قطعه قطعه تولید شده توسط SLIC اشاره دارد. ما نقاط برچسب طبقهبندی شناسایی شده CNN و بخشهای طبقهبندی SLIC را در فضا قرار دادیم. بدین ترتیب شرایط زیر رخ داد:
برای مورد شکل 9 A، بخش را با استفاده از بیشترین تعداد تگ هایی که در قسمت ظاهر می شود نامگذاری کردیم. از آنجایی که در نظر گرفته می شود که حالت ممکن است اکثریت نباشد (50%)، ما باید از روش Top_K برای خروجی سه طبقه بندی اول با بالاترین نرخ پیش بینی در لایه softmax استفاده کنیم و مقایسه ها را برای به دست آوردن اضافه کنیم. طبقه بندی با بیشترین احتمال کل وضعیت شکل 9 ب بسیار ساده تر است. ما میتوانیم مستقیماً نتیجه طبقهبندی CNN را به این بخش اختصاص دهیم.
در مورد شکل 9 C، ما نیاز داشتیم که کلاس را در این ناحیه خالی بگذاریم و سپس از الگوریتم nibble برای اختصاص آن استفاده کنیم. الگوریتم nibble مقدار نزدیکترین همسایه را به ناحیه مورد نظر اختصاص می دهد. الگوریتم تخصیص اقلیدسی داخلی را انجام می دهد و نزدیکترین مقادیر همسایه را به هر ناحیه هدف اختصاص می دهد.
با ادغام SLIC و CNN، ما یک روش نقشه برداری زمین شناسی با وضوح بالا بر اساس SLIC-CNN ایجاد کردیم. این روش مبتنی بر استفاده از طبقه بندی یادگیری عمیق برش های سنجش از دور با وضوح بالا است. با استفاده از روشهای طبقهبندی SLIC برای تعیین مرز طبقهبندی، این دو توسط حالت و اصول تصمیمگیری خاص ترکیب میشوند که منجر به نتایج نهایی نقشهبرداری با وضوح بالا میشود ( شکل 10 ).
در این آزمایش، ما یک پلت فرم الگوریتم SLIC-CNN بر اساس نسخه پایتون چارچوب Tensorflow ساختیم. پلتفرم سختافزار آزمایشی یک Intel Xeon E5-2630V4 دو کاناله با پردازنده گرافیکی nVIDIA Quadro K5200 بود.
5. نتیجه
5.1. بهینه سازی CNN
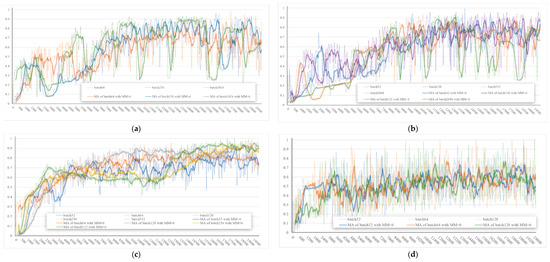
برای یافتن بهترین پارامترهای CNN، در مجموع از 15 ترکیب پارامتر استفاده کردیم. در مورد تعداد معینی از تکرارها، کل زمان محاسبه ارتباط نزدیکی با اندازه دسته دارد. در نمودار خط آموزش دقت مدل، میتوان دریافت که با تعداد معینی از تکرارها، هرچه تنظیم اندازه دسته بالاتر باشد، محاسبه زمان بیشتری را صرف میکند. هر چه تنظیم نرخ یادگیری کوچکتر باشد، مدل کندتر همگرا می شود. با این حال، در عین حال، با توجه به تأیید نمودار خطی نرخ صحیح، اگر اندازه دسته خیلی زیاد تنظیم شود، نوسانات زیادی در میزان دقت اعتبارسنجی مدل ایجاد میکند (دسته 1024 و دسته 2048 در شکل 11).). تنظیم نرخ یادگیری بیش از حد (0.01) همچنین می تواند باعث شود اعتبار مدل به درستی نوسان کند و همگرایی ضعیفی داشته باشد.
از شکل 11 ، می توانیم میانگین نرخ صحیح هر مدل را مقایسه کنیم، اما نمی توانیم ببینیم که آیا این نرخ صحیح پایدار است یا خیر. پس از در نظر گرفتن شکل 12 ، شکل 13 و شکل 14 ، و پس از چندین آزمایش و مقایسه های متعدد، نرخ یادگیری 0.0001 و مدل آموزش اندازه دسته ای 512 را به عنوان مدل های کاربردی برای شرکت در کار نقشه برداری SLIC-CNN انتخاب کردیم.
5.2. بهینه سازی SLIC
در پارامترهای الگوریتم SLIC، پارامترهای n_segments یا K تعداد برش ها را کنترل می کنند. پارامتر سیگما بر عملگر هموارسازی گاوسی تأثیر میگذارد، پارامتر max_iter تعداد تکرارهای صاف را کنترل میکند و پارامترهای max_iter و sigma اثر خوشهبندی K-means را با هم کنترل میکنند. پارامتر فشردگی رابطه بین فضای رنگ و فاصله را متعادل می کند. از طریق ترکیب پارامترهای مختلف، ما می توانیم انواع ترکیبات تقسیم بندی را به دست آوریم. طبق محاسبات قبلی، تعداد برش های یادگیری عمیق در منطقه مورد مطالعه 13432 است و تعداد بخش های SLIC نباید از این مقدار بیشتر باشد. برای یافتن بهترین پارامترهای تقسیمبندی، 165 آزمایش را برای n_segments از 350-10000، سیگما از 0-8، و فشردگی از 0.2-50 انجام دادیم. و نتیجه تقسیم بندی را با بهترین اثر برازش لبه انتخاب کرد. یعنی n_segments = 8000، سیگما = 6، و فشردگی = 5 (شکل 15 ). از شکل می بینیم که الگوریتم SLIC بهتر می تواند لبه قطعه را با لبه جسم زمین تطبیق دهد. اگرچه برخی از بخش های حلقه متحدالمرکز تولید می شوند، ما فقط به SLIC برای علامت گذاری لبه موثر برای تکمیل کار نیاز داریم. ادغام بخش ها به الگوریتم SLIC تعلق ندارد.
پس از به دست آوردن نتایج تقسیم بندی SLIC و نتایج شناسایی AlexNet و سپس فرآیند حالت و تصمیم گیری ویژه، در نهایت می توان به نتایج نقشه برداری زمین شناسی با وضوح بالا منطقه مورد مطالعه دست یافت.
5.3. نتایج SLIC-CNN
در مقایسه با شکل 16 ، میتوانیم ببینیم که الگوریتم SLIC-CNN میتواند زمین در معرض دید در منطقه را به دقت شناسایی کند، و حاشیهنویسی لبه زمین نیز دقیقتر است. مرزهای بین میلونیت ها و ارتوگنیس، مرزهای بین گیاهان و سواحل، و مرزهای بین جاده ها و سواحل همگی دقیق تر هستند.
به منظور مقایسه با نتایج طبقهبندی روشهای طبقهبندی موجود، ما همچنین به صورت تجربی منطقه مورد مطالعه را با استفاده از طبقهبندی پیکسل بر اساس روش حداکثر درستنمایی ( جدول 2 ) و طبقهبندی شیگرا بر اساس k-نزدیکترین همسایه طبقهبندی و تفسیر کردیم. روش (KNN) ( جدول 3 ). در طبقه بندی شی گرا، آزمایش ها و مقایسه های زیادی انجام دادیم. وقتی پارامتر مقیاس روی 90، پارامتر ادغام روی 95 و اندازه هسته بافت روی 5 تنظیم شده بود، بهترین اثر طبقه بندی بود.
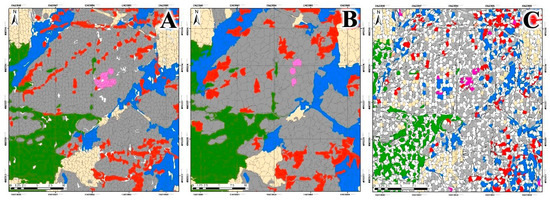
پس از استخراج نتایج طبقهبندی و ماتریس سردرگمی آن روشهای طبقهبندی، ما دقت نقشهبرداری چهار روش را در کار نقشهبرداری با وضوح بالا به صورت بصری مقایسه کردیم ( شکل 17 ).
ماتریس سردرگمی ابزاری بصری برای نمایش نتایج چند کلاسه است. سلول های (x، y) نشان دهنده نسبت اشیاء در x هستند که به y طبقه بندی می شوند. بر این اساس، می توان دریافت که بازدیدهای تشخیص کلی روش مبتنی بر پیکسل نسبت به روش شی گرا، به ویژه برای Mylonite، بهتر است. روش CNN نرخ ضربه بسیار بهتری را نسبت به روش های مبتنی بر پیکسل و شی گرا نشان می دهد ( جدول 4 ). این با مزایای نشان داده شده توسط الگوریتم های یادگیری عمیق در سایر زمینه های تشخیص تصویر مطابقت دارد. به جز موارد مختلف، SLIC-CNN نرخ ضربه بالاتری نسبت به روش CNN دارد ( جدول 5 ). نتیجه تأیید کاپا SLIC-CNN k = 0.8523 است که از روش AlexNet نیز بیشتر است (k = 0.8426).
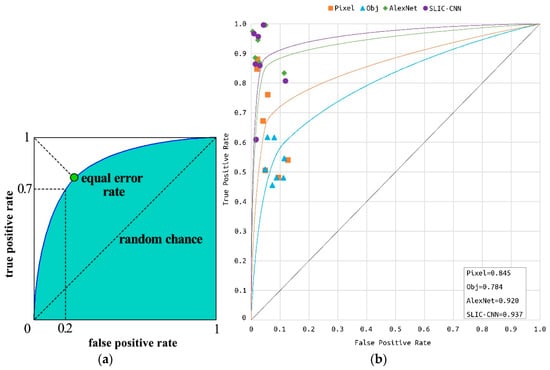
برای مقایسه شهودی بیشتر نتایج چهار روش، از منحنی مشخصه عملیاتی گیرنده (ROC) استفاده کردیم ( شکل 18).آ). ROC (منحنی مشخصه عملکرد گیرنده) یک شاخص جامع است که متغیرهای پیوسته حساسیت و ویژگی را منعکس می کند. از روش ترکیب برای آشکار کردن رابطه بین حساسیت و ویژگی استفاده می کند. برای رسم منحنی از حساسیت به عنوان مختصات و (1-ویژگی) به عنوان آبسیسا استفاده می کند. هر چه سطح زیر منحنی (AUC) بزرگتر باشد، دقت تشخیصی بالاتر است. در منحنی ROC، نزدیکترین نقطه به سمت چپ بالای نمودار یک مقدار بحرانی با حساسیت و ویژگی بالاتر است. در این مورد، AUC الگوریتم SLIC-CNN 0.937، بالاتر از طبقه بندی برش AlexNet (0.92)، روش مبتنی بر پیکسل (0.845)، و روش شی (0.784) ( شکل 18 ب) بود.
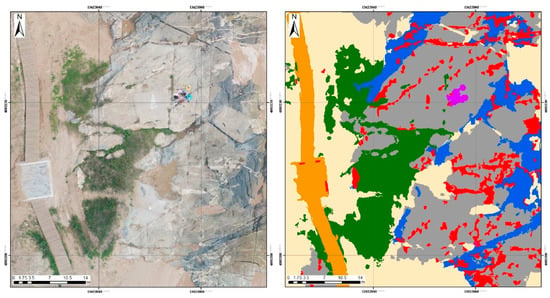
استفاده از نتایج نقشه برداری SLIC-CNN در مقایسه با داده های زمین شناسی موجود ( شکل 19برخی از ویژگی های روش نقشه برداری زمین شناسی با وضوح بالا پهپاد را می توان یافت. برای سهولت مقایسه و تصویر، دایکهای معمولی را با همان علامت لاتین در نقشه علامتگذاری کردیم و آنها را با خطوط قرمز تیره زیر رگههای معمولی روی تصویر سنجش از راه دور مشخص کردیم. قسمتی که در اثر عوامل انسانی توسط بتن یا ساحل پوشانده شده است با خط نقطه چین تیره قرمز مشخص می شود. نقشه برداری SLIC-CNN در شناسایی رگه ها در α1 در شکل بهتر است، اما هنوز به اندازه کافی پیوسته نیست. در مقایسه با تصاویر سنجش از دور، متوجه شدیم که قسمت در معرض دایک α1 به تدریج نازک شد و الگوریتم نتوانست آن را شناسایی کند. قسمت جنوبی دایک α2 توسط یک میز سیمانی تازه ساخته شده بود و زمین توسط گردشگران در β3 مسدود شده بود که شناسایی رگه های منطقه را غیرممکن می کرد. علاوه بر این، تشخیص رگهها در α3 بسیار مؤثر بود و دایکهای «S» شکل نیز در α4 شناسایی شدند. حجاب در β1 خیلی کوچک بود و منجر به تشخیص ضعیف شد. دایک اساسی در β2 توسط الگوریتم به عنوان رسوب ماسه شناسایی شد. به طور کلی، SLIC-CNN دارای نرخ تشخیص بالایی برای لبه و محتوای تودههای سنگی است و شناسایی رگههای آن نیز میتواند یک مرجع جزئی ارائه دهد.
شکل 19 b یک نقشه زمینشناسی سنگشناسی تکتونیکی ظریف است که توسط جین وی و ژنگ چانگکینگ، کالج علوم زمین، دانشگاه جیلین در سال 2004 ترسیم شده است. این نقشه برای مدت طولانی جزئیترین نقشه زمینشناسی منطقه بوده است. با این حال، می توان دریافت که لبه های بدنه میلونیت به طور نادرست در تصویر کشیده شده است (w1، w2، و w3 در شکل 19 ب). نتیجه فرآیند نقشه برداری خودکار زمین شناسی ( شکل 18 الف) در قالب فایل شیپ است که یک قالب کار و تبادل است که توسط موسسه تحقیقات سیستم های محیطی (ESRI) برای داده های برداری ساده با ویژگی ها منتشر شده است و بسیار راحت است. برای ادغام، برش و تنظیم ویژگی ها. بر اساس شکل 18الف، دادههای بهدستآمده از بررسی زمینی، نتایج خودکار را کامل کردند، که منجر به یک نقشه زمینشناسی با وضوح بالا از منطقه تایلی شد ( شکل 20 ). این نقشه زمین شناسی در مقایسه با مطالعات قبلی از وضوح و پوشش بالاتری برخوردار است. علاوه بر این، به لطف استفاده از روش خودکار SLIC-CNN، ترسیم این نقشه تنها نیم روز طول کشید که کارایی را در مقایسه با روش سنتی بررسی زمینشناسی بهبود بخشید.
6. بحث و گفتگو
محبوبیت پهپاد فرصتی را برای حل مشکلات بررسی زمین شناسی در مناطق صعب العبور به وجود آورده است. اگرچه ما در این آزمایش عملیات زمین شناسی زمین را به حداقل رساندیم، اما کار نقشه برداری زمین شناسی با وضوح بالا که به نظر می رسد خودکار است، هنوز از مقدار معینی از کار زمین شناسی زمین جدا نیست. در این مرحله، با شرایط تصویر محدود شده است و هنوز امکان تشخیص دقیق سنگشناسیهای خاصی مانند پگماتیتها و سنگهای ریزدانه در این منطقه مورد مطالعه وجود ندارد. با این حال، از جدول 5 قابل مشاهده استکه، حتی با روش SLIC-CNN، نرخ طبقه بندی صحیح دایک ها در منطقه مورد مطالعه کم باقی می ماند. این مربوط به داده های واقعی مورد استفاده در آزمایش است. وضوح مکانی داده های واقعی مورد استفاده در این آزمایش به 3 سانتی متر رسید و تقریباً تمام دایک های کوچک در منطقه مورد مطالعه ترسیم شدند. علاوه بر این، شایان ذکر است که پهپادها و دوربین ها نمی توانند اطلاعات سنگی پوشیده از شن، خاک یا پوشش گیاهی را جمع آوری کنند. این امر کاربرد بررسی های زمین شناسی خودکار را محدود می کند. هنوز مطالعات زیادی در مورد کاربرد اتوماسیون در زمینه نقشه برداری زمین شناسی وجود دارد.
با این حال، با آزمایشها مشخص شد که استفاده از پهپادها و الگوریتمهای یادگیری عمیق در کارهای سنتی نقشهبرداری زمینشناسی افزایش بسیار زیادی در کارایی کار ایجاد میکند و دقت نقشهبرداری آن نیز رضایتبخش است. فناوری پهپاد راهحلهای جدیدی را برای بررسیهای زمینشناسی به ارمغان میآورد.
ثابت شده است که مرزهای لیتولوژی تشخیص خودکار کارایی نقشه برداری زمین شناسی را تا حد زیادی بهبود می بخشد [ 59 ]]. این آزمایش از CNN بر اساس آزمایش Vasuki برای بهبود بیشتر اتوماسیون نقشه برداری استفاده کرد. در مقایسه با طبقهبندی سنتی، استفاده از SLIC-CNN میتواند سنگشناسی و مرزها را با دقت و خودکار بیشتری تشخیص دهد. علاوه بر این، فناوری SLIC-CNN ایده های مهمی را برای نقشه برداری خودکار زمین شناسی ارائه می دهد. با فناوری تشخیص تصویر با دقت بالا، ما معتقدیم که بررسیهای زمینشناسی آینده خودکار و هوشمندتر خواهند شد: پهپادها بر اساس مسیرها پرواز میکنند و تصاویر زمینی میگیرند و پدیدههای مهم زمینشناسی در تصاویر به سرعت شناسایی و موقعیتیابی خواهند شد. اطلاعات مرتبط به سرور ارسال می شود و به سرعت نقشه برداری می شود. مناطق مهم و مناطق نامشخص برای زمین شناسان برای انجام تحقیقات زمینی شناسایی خواهند شد.
7. نتیجه گیری
در این منطقه مورد مطالعه، نتایج یک فرآیند جدید نقشه برداری در مقیاس بزرگ را می توان رضایت بخش دانست. تاثیر تسریع در استفاده از پهپادها و الگوریتم های یادگیری عمیق آشکار است. نتایج روش SLIC-CNN بسیار بهتر از روشهای طبقهبندی تصویر سنتی، مانند CNN و AlexNet، برای تمایز بدنه زمینشناسی و اثر برازش لبه توده سنگ بود، که در مقایسه با روش یادگیری عمیق معمولی بهبود یافته بود. در مقایسه با بررسیهای زمینشناسی سنتی، نتایج دقیقتری از نقشهبرداری توده سنگ را میتوان با کمک تصاویر پهپاد به دست آورد. اگرچه نتایج طبقهبندی خودکار SLIC-CNN برای تشخیص رگه سنگ ناکافی بود، اما دقت نقشه برداری توده سنگی دیگر به طرز چشمگیری برآورده شد. علاوه بر این، می تواند کار دستی نقشه برداری با وضوح بالا را تا حد زیادی کاهش دهد و یک طرح زمین شناسی با وضوح بالا با دقت طبقه بندی بالا در زمان کمتری تولید کند. بر اساس پهپاد، روش SLIC-CNN و شواهد تکتونیکی بیشتر، ما نتایج نقشه زمینشناسی با وضوح بالا و ناحیه تغییر شکل برشی شکلپذیر در منطقه را بهدست آوردیم و نتایج مطالعات قبلی روی ناحیه برشی شکلپذیر در تایلی را تأیید کردیم. حوزه. روش SLIC-CNN تفسیر تصاویر سنجش از دور با وضوح بالا را سرعت می بخشد، دقت را بهبود می بخشد و نتایج طبقه بندی را برای زمین شناسی قانع کننده تر می کند. ما نتایج نقشه زمینشناسی با وضوح بالا و زون تغییر شکل برشی شکلپذیر در منطقه را بهدست آوردیم و نتایج مطالعات قبلی بر روی زون برشی شکلپذیر در منطقه تایلی را تأیید کردیم. روش SLIC-CNN تفسیر تصاویر سنجش از دور با وضوح بالا را سرعت می بخشد، دقت را بهبود می بخشد و نتایج طبقه بندی را برای زمین شناسی قانع کننده تر می کند. ما نتایج نقشه زمینشناسی با وضوح بالا و زون تغییر شکل برشی شکلپذیر در منطقه را بهدست آوردیم و نتایج مطالعات قبلی بر روی زون برشی شکلپذیر در منطقه تایلی را تأیید کردیم. روش SLIC-CNN تفسیر تصاویر سنجش از دور با وضوح بالا را سرعت می بخشد، دقت را بهبود می بخشد و نتایج طبقه بندی را برای زمین شناسی قانع کننده تر می کند.
بنابراین، اثر کاربردی الگوریتم SLIC-CNN در زمینه نقشه برداری زمین شناسی رضایت بخش و ارزش تبلیغ دارد. این روش ها و نتایج تجربیات بسیار مفیدی را برای کارهای زمین شناسی بعدی فراهم می کند و با کاهش فشارهای پرسنل و محیطی در بررسی های میدانی، ابزار تحقیقات زمین شناسی را بسیار غنی می کند.
منابع
- لاتیفویچ، آر. پولیو، دی. کمپبل، جی. ارزیابی شبکه های عصبی پیچشی برای نقشه برداری زمین شناسی سطحی در منطقه زمین شناسی رای جنوبی، مناطق شمال غربی، کانادا. Remote Sens. 2018 , 10 , 307. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- شان، پی بی؛ استیون، ام. دارن، تی. مایک، آر جی؛ سینان، ع. سام، تی تی. فتوگرامتری Hasnain، AB زمینی و مبتنی بر پهپاد: یک ابزار نقشه برداری چند مقیاسی و با وضوح بالا برای زمین شناسی ساختاری و دیرینه لرزه شناسی. جی. ساختار. جئول 2014 ، 69 ، 163-178. [ Google Scholar ]
- بالسترو، جی. Piana, F. نمایش دانش و عدم قطعیت در پایگاه داده های نقشه های زمین شناسی GIS. ایتالیایی جی. ژئوشی. 2007 ، 126 ، 487-495. [ Google Scholar ]
- ناتالیا، ک. میکولا، ال. سرگی، اس. Andrii, S. طبقه بندی یادگیری عمیق پوشش زمین و انواع محصول با استفاده از داده های سنجش از دور. IEEE Geosci. سنسور از راه دور Lett. 2017 ، 14 ، 778-782. [ Google Scholar ]
- آلمالکی، کالیفرنیا؛ Bantan، RA; هاشم، سلام؛ لونی، OA; علی، کارشناسی ارشد بهبود نقشه برداری زمین شناسی جزایر فراسان با استفاده از سنجش از دور و داده های حقیقت زمینی. J. Maps 2017 ، 13 ، 900–908. [ Google Scholar ] [ CrossRef ]
- جونز، RR; مک کافری، KJW; ویلسون، RW; Holdsworth، RE اکتساب داده های میدان دیجیتال: به سمت افزایش کمیت عدم قطعیت در طول نقشه برداری زمین شناسی. جئول Soc. لندن. مشخصات انتشار 2004 ، 239 ، 43-56. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- چاترجی، اس. باتاچرجی، ا. سامانتا، بی. پال، KS سیستم نظارت بر کیفیت بر اساس تصویر گریدهای سنگ آهک. محاسبه کنید. Ind. 2010 , 61 , 391-408. [ Google Scholar ] [ CrossRef ]
- لی، جی. جین، دبلیو. ژنگ، پی. ژانگ، X. ویژگیهای ژئوشیمیایی و زیرکون U-Pb ژئوکرونولوژی آداملیت بیوتیت در منطقه تایلی، استان لیائونینگ غربی. J. Jilin Univ. علوم زمین اد. 2014 ، 44 ، 1219-1230. [ Google Scholar ]
- کروپی، ای. کسا، م. ناوارو، وی. سعید، س. پلوکین، سی. الحداد، بی. مورنو، ال. سوریا، ا. Ruffini، G. شبکههای عصبی کانولوشنال عمیق برای طبقهبندی پوشش زمین با تصاویر Sentinel-2. J. Appl. Remote Sens. 2019 , 13 , 024525. [ Google Scholar ] [ CrossRef ]
- تائو، ی. خو، ام. ژونگ، ی. Cheng, Y. شبکه عصبی دو جریانی به کمک GAN برای طبقهبندی تصاویر سنجش از دور با وضوح بالا. Remote Sens. 2017 , 9 , 1328. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- فو، جی. لیو، سی. ژو، آر. سان، تی. Zhang, Q. طبقه بندی برای تصاویر سنجش از دور با وضوح بالا با استفاده از یک شبکه کاملاً کانولوشن. Remote Sens. 2017 , 9 , 498. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- فریرا، آ. Giraldi, G. رویکردهای شبکه عصبی کانولوشن به طبقه بندی کاشی های گرانیتی. سیستم خبره Appl. 2017 ، 84 ، 1-11. [ Google Scholar ] [ CrossRef ]
- کراکنل، ام جی; Reading, AM نتایج مثبت عدم قطعیت: شناسایی مناطق تماس سنگشناسی از ژئوفیزیک هوا و دادههای ماهوارهای با استفاده از جنگلهای تصادفی و ماشینهای بردار پشتیبان. ژئوفیزیک 2013 ، 78 ، 113-126. [ Google Scholar ] [ CrossRef ]
- حسامیان، محمدحسن; جیا، دبلیو. او، X. کندی، پی. تکنیک های یادگیری عمیق برای تقسیم بندی تصویر پزشکی: دستاوردها و چالش ها. جی دیجیت. Imaging 2019 , 32 , 582–596. [ Google Scholar ] [ CrossRef ] [ PubMed ][ نسخه سبز ]
- جیا، اف. لی، ی. گوا، ال. لین، جی. Xing، S. یک شبکه عصبی ساخته شده با تکنیک یادگیری عمیق و کاربرد آن برای تشخیص هوشمند خطای ماشینها. محاسبات عصبی 2018 ، 272 ، 619-628 . [ Google Scholar ] [ CrossRef ]
- تانگ، جی. دنگ، سی. هوانگ، گیگابایت؛ ژائو، بی. تشخیص کشتی با دامنه فشرده در تصویر نوری فضایی با استفاده از شبکه عصبی عمیق و ماشین یادگیری شدید. IEEE Trans. Geosci. Remote Sens. 2015 ، 53 ، 1174-1185. [ Google Scholar ] [ CrossRef ]
- شیانجو، ال. Xinwen، C. ویتائو، سی. باند، سی. Shengwei, L. شناسایی زمین لغزش های جنگلی با استفاده از داده های LiDar، تجزیه و تحلیل تصویر مبتنی بر شی، و الگوریتم های یادگیری ماشین. Remote Sens. 2015 ، 7 ، 9705–9726. [ Google Scholar ]
- شارما، ا. لیو، ایکس. یانگ، ایکس. شی، دی. یک شبکه عصبی کانولوشنال مبتنی بر پچ برای طبقه بندی تصاویر سنجش از دور. شبکه عصبی 2017 ، 95 ، 19-28. [ Google Scholar ] [ CrossRef ]
- وانگ، QL; جین، دبلیو. Cai، LB; Cui، XH; ژانگ، Q. ویژگیهای وو، CS و پیدایش مجتمع گرانیتی نئوآرکه در Xingcheng از لیائونینگ غربی. گلوب. جئول 2012 ، 31 ، 479-492، (به زبان چینی با چکیده انگلیسی). [ Google Scholar ]
- پاتل، AK; Chatterjee, S. طبقه بندی نوع سنگ آهک مبتنی بر بینایی کامپیوتری با استفاده از شبکه عصبی احتمالی. Geosci. جلو. 2016 ، 7 ، 53-60. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- کریژفسکی، آ. سوتسکور، آی. هینتون، جی. طبقهبندی ImageNet با شبکههای عصبی کانولوشنال عمیق. عصبی Inf. روند. سیستم 2012 ، 25 ، 1145-1155. [ Google Scholar ] [ CrossRef ]
- Bejiga, MB یک رویکرد شبکه عصبی کانولوشن برای کمک به عملیات جستجو و نجات بهمن با تصاویر پهپاد. Remote Sens. 2017 , 9 , 100. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- دیمیتریوس، م. میهای، دی. توماس، ای. Uwe, S. طبقه بندی مشاهده زمین یادگیری عمیق با استفاده از شبکه های از پیش آموزش دیده ImageNet. IEEE Geosci. سنسور از راه دور Lett. 2016 ، 60 ، 105-109. [ Google Scholar ]
- گویدیچی، دی. کلارک، ML طبقهبندی پوشش زمینی شبکه عصبی کانولوشنال تک بعدی تصاویر فراطیفی چند فصلی در منطقه خلیج سانفرانسیسکو، کالیفرنیا. Remote Sens. 2017 , 9 , 629. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- Bouvrie, J. Notes on Convolutional Neural Networks. شبکه های عصبی 2006 ، 47-60، در عمل. [ Google Scholar ]
- جی، اس. ژانگ، سی. خو، آ. شی، ی. Duan, Y. شبکههای عصبی کانولوشنال سه بعدی برای طبقهبندی محصولات با تصاویر سنجش از دور چند زمانی. Remote Sens. 2018 ، 10 ، 75. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- LeCun، Y.; بنژیو، ی. هینتون، جی. یادگیری عمیق. Nature 2015 ، 521 ، 436. [ Google Scholar ] [ CrossRef ]
- آبادی، م. TensorFlow: یادگیری توابع در مقیاس. Acm Sigplan خیر. 2016 ، 51 ، 1. [ Google Scholar ] [ CrossRef ]
- ژنگ، سی جی; یوان، DX; یانگ، QY; ژانگ، XC; لی، تکنیک SC UAVRS برای مدیریت واکنش اضطراری خطر زمینشناسی در منطقه کوهستانی به کار گرفته شد. Appl. مکانیک. ماتر 2013 ، 239-240 ، 516-520. [ Google Scholar ] [ CrossRef ]
- ماچادو، جنرال موتورز؛ جابور، پ. کوئیلو، آ. آلبینو، جی. تکامل ژئوتاریخی و نقشه جدید زمین شناسی شهر ویتوریا، ES، برزیل. ساحل اقیانوس. مدیریت 2017 ، 10 ، 151. [ Google Scholar ] [ CrossRef ]
- تزیاوو، او. پیتارولی، س. نقشه برداری مبتنی بر وسیله نقلیه هوایی بدون سرنشین (UAV) سوتر، جی در بررسی های زمین شناسی مهندسی: ملاحظات برای نتایج بهینه. مهندس جئول 2017 ، 11 ، 232-250. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- یاتونانتان، وی. یون یونگ، اچ. پیتر، ک. استیون، ام. نقشه برداری نیمه خودکار سازه های زمین شناسی با استفاده از داده های فتوگرامتری مبتنی بر پهپاد: رویکرد تحلیل تصویر. محاسبه کنید. Geosci. 2014 ، 69 ، 22-32. [ Google Scholar ]
- Lv، Y.; دوان، ی. کانگ، دبلیو. لی، زی. پیشبینی جریان ترافیک با دادههای بزرگ: رویکرد یادگیری عمیق. IEEE Trans. هوشمند ترانسپ سیستم 2015 ، 16 ، 865-873. [ Google Scholar ] [ CrossRef ]
- گوا، ی. لیو، ی. اورلمانز، آ. لائو، اس. وو، اس. Lew, SM یادگیری عمیق برای درک بصری: یک بررسی. محاسبات عصبی 2016 ، 187 ، 27-48. [ Google Scholar ] [ CrossRef ]
- لری، دی جی; علوی، ق. گندمی، ق. واکر، AL یادگیری ماشینی در علوم زمین و سنجش از دور. Geosci. جلو. 2016 ، 7 ، 3-10. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- هولدن، دی. سایتو، جی. کومورا، تی. چارچوب یادگیری عمیق برای سنتز و ویرایش حرکت شخصیت. ACM Trans. نمودار. 2016 ، 35 ، 1-11. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- لی، دبلیو. لیو، ی. جین، دبلیو. نوبائر، اف. ژائو، ی. لیانگ، سی. ون، کیو. فنگ، ز. لی، جی. لیو، Q. استقرار سنتکتونیکی نفوذهای بیوتیت-سینوگرانیت تریاس در منطقه تایلی، لیائونینگ غربی، شمال شرقی چین: بینش هایی از پتروژنز، رئولوژی و زمین شناسی. J. آسیایی زمین علوم. 2017 ، 1 ، 20. [ Google Scholar ] [ CrossRef ]
- Wu، FY; یانگ، جی اچ. ژانگ، YB سنین استقرار گرانیت های مزوزوئیک در بخش جنوب شرقی استان لیائونینگ غربی. آکتا پت. گناه 2006 ، 22 ، 315-325، (به زبان چینی با چکیده انگلیسی). [ Google Scholar ]
- لیانگ، سی. لیو، YJ; نوبائر، اف. برنرودر، ام. جین، دبلیو. لی، دبلیو. زنگ، ز. ون، کیو. ژائو، ی. سازهها، تحلیل سینماتیکی، پارامترهای رئولوژیکی و تخمین دما-فشار ناحیه برشی شکلپذیر مزوزوئیک Xingcheng-Taili در کراتون چین شمالی. جی. ساختار. جئول 2015 ، 78 ، 27-51. [ Google Scholar ] [ CrossRef ]
- لیانگ، مکانیسمهای تغییر شکل CY و تکامل منطقه برشی شکلپذیر Xingcheng-Taili، کراتون شرقی شمال چین. دکتری پایان نامه، دانشگاه سالزبورگ، سالزبورگ، اتریش، 2015; صص 1-168. [ Google Scholar ]
- لیانگ، سی. لیو، YJ; نوبائر، اف. جین، دبلیو. زنگ، ز. جنسر، جی. لی، دبلیو. لی، دبلیو. آویزان شدن.؛ ون، کیو. و همکاران ویژگیهای ساختاری و ژئوکرونولوژی زیرکون LA-ICP-MS U-Pb سنگهای گرانیتی تغییر شکل یافته از ناحیه برشی شکلپذیر مزوزوئیک Xingcheng-Taili در کراتون چین شمالی. تکتونوفیزیک 2015 ، 650 ، 80-103. [ Google Scholar ] [ CrossRef ]
- لو، دبلیو. لیو، ی. نیش، بی. لی، دبلیو. جی، Q. لیانگ، جی. تجزیه و تحلیل پیدایش ساختار کروی در میلونیت ناحیه برشی شکلپذیر Taili در لیائونینگ غربی. جهان جئول. 2014 ، 33 ، 844-854، (به زبان چینی با چکیده انگلیسی). [ Google Scholar ]
- موکرجی، DP; پوتاپوویچ، ی. لونر، آی. ژانگ، اچ. بخش بندی تصویر سنگ معدن با یادگیری ویژگی های تصویر و شکل. تشخیص الگو Lett. 2009 ، 30 ، 615-622. [ Google Scholar ] [ CrossRef ]
- لیتجنز، جی. کویی، تی. بجنوردی، BE; ستیو، ا. سیومپی، اف. غفوریان، م. ون درلاک، ج. گینکن، بی. سانچز، سی. نظرسنجی در مورد یادگیری عمیق در تجزیه و تحلیل تصویر پزشکی. پزشکی تصویر مقعدی 2017 , 40 , 60. [ Google Scholar ] [ CrossRef ] [ PubMed ][ نسخه سبز ]
- هینتون، جنرال الکتریک؛ اوسیندرو، اس. الگوریتم یادگیری سریع YW برای شبکه های باور عمیق. محاسبات عصبی 2014 ، 18 ، 1527-1554. [ Google Scholar ] [ CrossRef ]
- او، ز. لیو، اچ. وانگ، ی. Hu, J. یادگیری نیمه نظارتی مبتنی بر شبکه های متخاصم مولد برای طبقه بندی تصاویر فراطیفی. Remote Sens. 2017 , 9 , 1042. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- جینگ، ال. ژائو، ام. لی، پی. Xu, X. یک روش یادگیری ویژگی و تشخیص عیب مبتنی بر شبکه عصبی کانولوشن برای نظارت بر وضعیت گیربکس. اندازه گیری 2017 ، 7 ، 1-10. [ Google Scholar ] [ CrossRef ]
- یانگ، م. لیو، ی. شما، Z. آموزش تعبیه شده توسط اقلیدسی بر اساس شبکه عصبی کانولوشن برای تطبیق استریو. محاسبات عصبی 2017 ، 6 ، 195-200. [ Google Scholar ] [ CrossRef ]
- سانتوس، جی. فاریا، ف. کلومبی، آر. تورس، آر. Lamparelli، R. یک رویکرد برنامه ریزی ژنتیکی برای شناسایی محصول قهوه. Geosci. سنسور از راه دور Symp. 2010 ، 1 ، 3418-3421. [ Google Scholar ]
- سجاد، م. خان، س. حسین، ت. محمد، ک. سنگایاه، ا. کاستیلیونه، آ. اسپوزیتو، سی. Baik, S. سیستم احراز هویت دو لایه ضد جعل چند عاملی مبتنی بر CNN. تشخیص الگو Lett. 2019 ، 126 ، 123-131. [ Google Scholar ] [ CrossRef ]
- ران، ایکس. ژو، ال. ژانگ، ی. لیو، ز. سانگ، ایکس. او، جی. راک طبقه بندی از تکه های تصویر میدانی با استفاده از یک شبکه عصبی پیچیده عمیق تجزیه و تحلیل شده است. ریاضیات 2019 ، 7 ، 755. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- تام، VWY؛ Le، KN; اوانجلیستا، ACJ; بوترا، ا. تران، سی. Teara, A. اثر خاکستر بادی و سرباره بر روی بتن: خواص و تجزیه و تحلیل انتشار. جلو. مهندس مدیریت 2019 ، 6 ، 395. [ Google Scholar ] [ CrossRef ]
- لوینشتاین، ا. استری، ا. Kutulakos، KN; ناوگان، دی جی; دیکنسون، اس جی. Siddiqi, K. TurboPixels: سوپرپیکسل های سریع با استفاده از جریان های هندسی. IEEE Trans. الگوی مقعدی ماخ هوشمند 2009 ، 31 ، 2290-2297. [ Google Scholar ] [ CrossRef ] [ PubMed ][ نسخه سبز ]
- آچانتا، آر. شاجی، ع. اسمیت، ک. لوچی، ا. فوا، پ. سابین، S. سوپرپیکسل های SLIC در مقایسه با روش های پیشرفته سوپرپیکسل. IEEE Trans. الگوی مقعدی ماخ هوشمند 2012 ، 34 ، 2274-2282. [ Google Scholar ] [ CrossRef ] [ PubMed ][ نسخه سبز ]
- خوزه، ام. خوزه، ام جی; Geazy، M. تقسیم بندی و طبقه بندی تصویر با سوپرپیکسل SLIC و شبکه عصبی کانولوشنال در زمینه جنگل. IEEE Int. Geosci. سنسور از راه دور Symp. 2019 ، 1 ، 6543–6546. [ Google Scholar ]
- یوشیانگ، ز. کانگ، ال. یانی، دی. که، دبلیو. Xiangyun، H. طبقه بندی نیمه نظارت شده بر اساس تقسیم بندی SLIC برای تصویر فراطیفی. IEEE Geosci. سنسور از راه دور Lett. 2019 . [ Google Scholar ] [ CrossRef ]
- دوا، د. جوردی، آی. جولین، ام. بزرگسازی سوپرپیکسلهای SLIC با استفاده از رویکرد مبتنی بر کاشی. IEEE Trans. Geosci. Remote Sens. 2019 , 57 , 3073–3085. [ Google Scholar ]
- لیژن، ال. چوانگ، دبلیو. Xiao, Y. ترکیب بافت در روش SLIC Super-pixels برای تقسیم بندی تصویر سنجش از دور با وضوح فضایی بالا. بین المللی Conf. Agro-Geoinformatic 2019 ، 1 ، 1-5. [ Google Scholar ]
- واسوکی، ی. هولدن، ای جی; کووسی، پ. استیون، ام. روش تقسیمبندی تصویر تعاملی برای تشخیص مرز سنگشناسی: ابزار نقشهبرداری سریع برای زمینشناسان. محاسبه کنید. Geosci. 2017 ، 100 ، 27-40. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
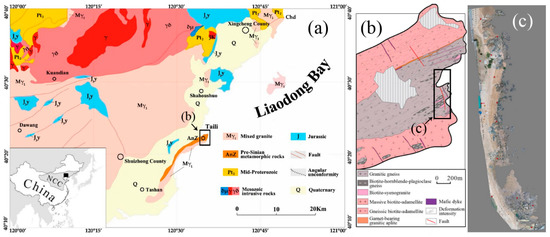
شکل 1. یک نقشه شماتیک از مکان در مورد کراتون شمال چین (NCC) و Taili. بر اساس نتایج بررسی منطقه ای تیم زمین شناسی لیائونینگ در سال 1983 و لیانگ سی در سال 2015. ( الف ) نقشه زمین شناسی زمین ساختی لبه شمالی NCC. ( ب ) نقشه زمین شناسی منطقه طیلی. ( ج ) تصویر سنجش از دور پهپاد از منطقه Taili.
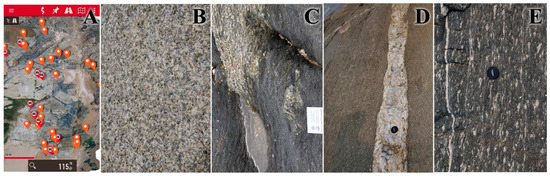
شکل 2. ( الف ) نمونه های حقیقت پایه در برنامه OruxMaps. ( ب ) گرانیت بیوتیت دار. ( C ) زنولیت های کوارتز دیوریت گنیس در میلونیت یافت شد. ( D ) رگه های پگماتیت از طریق میلونیت بریده می شوند. ( ه ) میلونیت ها.
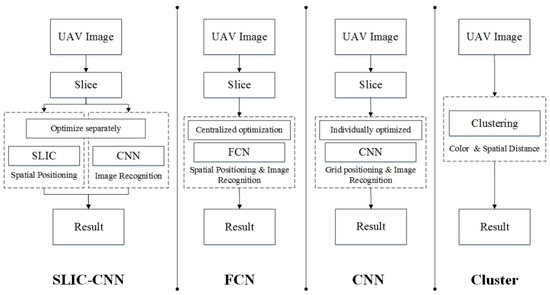
شکل 3. شبکه های عصبی کانولوشنال خوشه بندی تکراری خطی ساده (SLIC-CNN)، شبکه های کاملاً پیچیده (FCN)، شبکه های عصبی کانولوشنال (CNN) و الگوریتم های خوشه بندی سنتی (ISODATA، K-mean، Superpixel) به عنوان فرآیندهای ساده نشان داده شده اند.
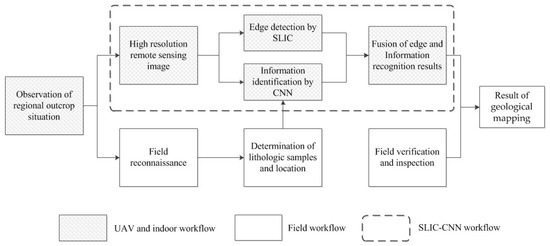
شکل 4. نمودار کار داخلی پهپاد، و جریان کار میدانی در گردش کار نقشه برداری جدید زمین شناسی.
شکل 5. جریان دقیق روش نقشه برداری زمین شناسی در مقیاس بزرگ SLIC-CNN.

شکل 6. نمودار شماتیک پارامتری هر لایه از مدل AlexNet.
شکل 7. مراحل فرآیند طبقه بندی یادگیری عمیق معمولی.
شکل 8. الف. نتیجه طبقهبندی زمانی که مرحله مرکز خوشهبندی ساده خطی تکرار شونده (SLIC) طول مرحله برش شبکههای عصبی پیچیده (CNN) است. B. نتیجه طبقه بندی زمانی که مرحله مرکز خوشه بندی SLIC >> اندازه گام برش CNN. ج. نتیجه طبقه بندی زمانی که اندازه گام مرکز خوشه بندی SLIC << طول برش CNN.
شکل 9. بخش و مکان مکاتبات CNN نقاط طبقه بندی. ( الف ) یک بخش مربوط به دو یا چند نقطه طبقه بندی است. ( ب ) یک بخش مربوط به یک نقطه طبقه بندی است. و ( ج ) یک قطعه نقطه ای ندارد که در محدوده آن قرار گیرد.
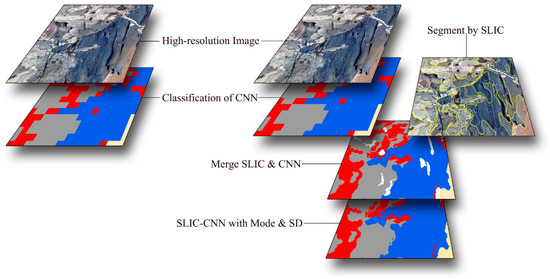
شکل 10. مقایسه بین روش طبقه بندی CNN خالص و روش SLIC-CNN در فرآیند نقشه برداری زمین شناسی.
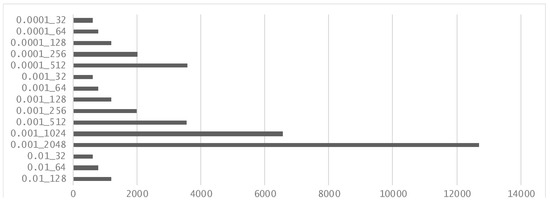
شکل 11. با مقایسه زمان محاسبه مدل CNN تحت پارامترهای مختلف در این مقاله، واحد مختصات افقی در رتبه دوم قرار دارد و فرمت نام نوار مختصات “نرخ یادگیری _ دسته ای” است.
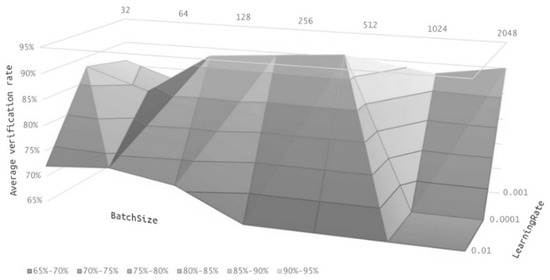
شکل 12. سطح سه بعدی میانگین نرخ تایید مدل با چندین پارامتر.
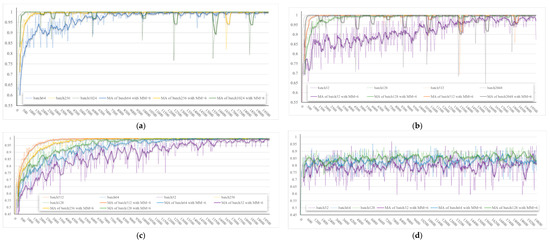
شکل 13. منحنی نرخ دقت تحت پارامترهای مختلف. ( الف ) هنگامی که نرخ یادگیری 0.001 است، منحنی نرخ دقت آموزش مدل تحت پارامترهای مختلف 1. ( ب ) هنگامی که نرخ یادگیری 0.001 است، منحنی نرخ دقت آموزش مدل تحت پارامترهای مختلف 2. ( ج ) زمانی که نرخ یادگیری 0.0001، منحنی نرخ دقت آموزش مدل تحت پارامترهای مختلف. ( د ) هنگامی که نرخ یادگیری 0.01 است، منحنی نرخ دقت آموزش مدل تحت پارامترهای مختلف.
شکل 14. منحنی نرخ دقت تایید تحت پارامترهای مختلف. ( الف ) وقتی نرخ یادگیری 0.001 است، منحنی نرخ دقت تأیید مدل تحت پارامترهای مختلف 1. ( ب ) هنگامی که نرخ یادگیری 0.001 است، منحنی نرخ دقت تأیید مدل تحت پارامترهای مختلف 2. ( ج ) هنگامی که نرخ یادگیری 0.0001، منحنی نرخ دقت تایید مدل تحت پارامترهای مختلف. ( د ) هنگامی که نرخ یادگیری 0.01 است، منحنی نرخ دقت تأیید مدل تحت پارامترهای مختلف.
شکل 15. تقسیمبندی تصویر خوشهبندی تکراری خطی ساده (SLIC) از عکسهای اورتوفوتو در منطقه مورد مطالعه حاصل میشود.
شکل 16. مقایسه تصاویر سنجش از دور و نتایج SLIC-CNN. ( سمت چپ ) تصاویر سنجش از دور منطقه بزرگ در منطقه مورد مطالعه. ( سمت راست ) نتیجه تشخیص الگوریتم SLIC-CNN.
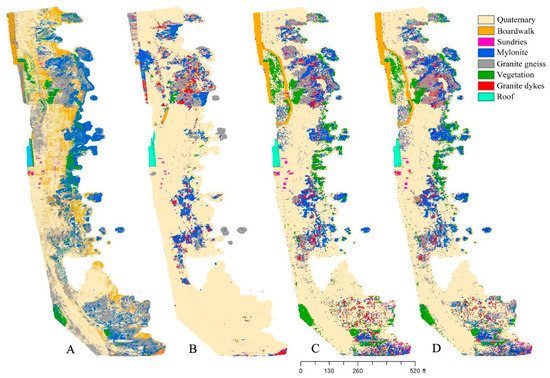
شکل 17. نتایج شناسایی سه الگوریتم طبقه بندی خودکار برای مناطق مورد مطالعه، ( A ) طبقه بندی مبتنی بر پیکسل. ( ب ) طبقه بندی شی گرا. ( ج ) طبقه بندی AlexNet. ( D ) طبقه بندی SLIC-CNN.
شکل 18. مشخصه عملیاتی گیرنده (ROC) و ناحیه زیر منحنی (AUC) نتیجه طبقه بندی. ( الف ) منحنی استاندارد ROC. ( ب ) منحنی ROC SLIC-CNN، AlexNet (CNN)، روش مبتنی بر پیکسل و مبتنی بر شی.
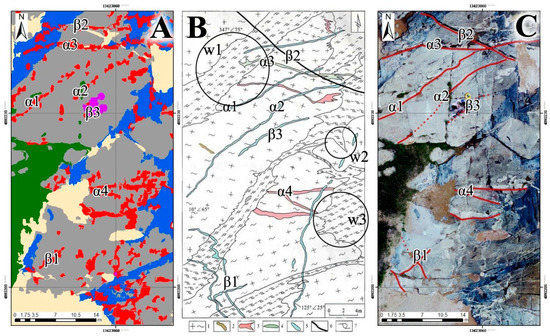
شکل 19. ( الف ) نتایج نقشه برداری SLIC-CNN. ( ب ) دقیق ترین نقشه زمین شناسی منطقه از سال 2004 (1. Orthogneiss. 2. گرانیت بیوتیت دار. 3. پگماتیت. 4. آپلیت گرانیتی گارنت دار. 5. آپلیت گرانیتی. 6. میلونیت. 7. دایک مافیک) . ( ج ) تصاویر سنجش از راه دور با وضوح بالا.
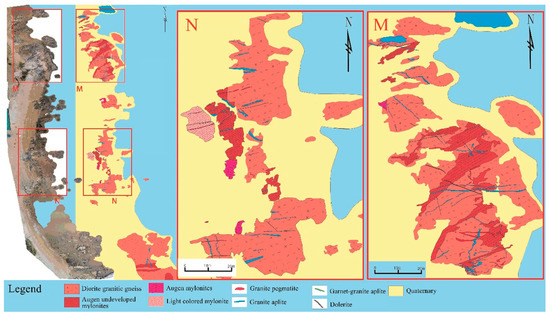
شکل 20. نقشه زمین شناسی در مقیاس بزرگ Taili با SLIC-CNN.


بدون دیدگاه