1. معرفی
در سال های اخیر تورهای پیاده روی افراد زیادی از جمله گردشگران و همچنین ساکنان را به خود جذب کرده است. تور پیادهروی یک فعالیت توریستی است که شامل یک پیادهروی رایگان در اطراف شهر با دستورالعملهای راهنما یا نقشه گردشگری است. بر اساس گزارش سازمان جهانی گردشگری (2019) [ 1 ]، کشورهای مختلف مکانهای تاریخی و طبیعی خود را به عنوان نقاط دیدنی (POI) تبلیغ میکنند و مسیرهایی را برای تورهای پیادهروی پیشنهاد میکنند که از طریق کتابهای راهنما و سایر نشریات ارائه میشوند. این امر به دلیل این انتظار که چنین تورهایی نه تنها از نظر اقتصادی سودمند هستند، بلکه فرصت هایی را برای یادگیری عملی و حفظ فرهنگ فراهم می کنند، محبوب شده است.
خدمات مبتنی بر مکان (LBS) تاکنون سهم بزرگی در زمینه گردشگری داشته است. بنیون و همکاران به اهمیت تشدید تجربیات گردشگران از طریق فناوری قبل، حین و بعد از تورهایشان در عصر گردشگری دیجیتال اشاره کردهاند [ 2 ]. در این زمینه، موضوع اصلی تحقیق ما ارائه پشتیبانی از تجربیات آموزشی و فرهنگی تورهای پیاده روی است. در حال حاضر، ما در حال توسعه یک برنامه تلفن همراه برای تورهای پیادهروی با یک دولت محلی هستیم و در مورد چگونگی افزایش این فعالیتها از دو جنبه، یعنی خود تور پیادهروی و فعالیتهای پس از تور، بحث میکنیم.شکل 1دو روش را برای بهبود روش اول نشان می دهد: (الف) کاربران می توانند از geofencing برای یافتن محتوای راهنما که به طور خودکار بر اساس مکان فعلی آنها نمایش داده می شود استفاده کنند [ 3 ]، و (ب) کاربران می توانند با استفاده از ارجاع جغرافیایی مکان خود را در نقشه های مصور پیدا کنند [ 4 ] ]. در مقابل، چارچوب برای افزایش فعالیتهای پس از تور در ابتدا نمایشهای مبتنی بر نقشه از مسیر پیادهروها را ارائه میدهد که توسط دستگاههای مجهز به GPS در طول تورها ثبت شدهاند. سپس کاربران میتوانند با ردیابی انیمیشنهایی که به وضوح نشان میدهند در کدام جهت قدم میزنند و ترتیب تجربیاتشان، آنچه را که در تورهای خود تجربه کردهاند، مرور کرده و به اشتراک بگذارند.
در این مقاله، ما بر روی فعالیت های پس از تور در پس زمینه فوق تمرکز خواهیم کرد. اپلیکیشن های زیادی وجود دارند که داده های GPS را برای نمایش مسیر حرکت کاربران روی نقشه ها ثبت می کنند. با این حال، به طور کلی، بسیاری از نمایشهای مبتنی بر نقشه دادههای خط سیر خام اغلب با یک مسئله مهلک مواجه شدهاند: پیچیدگی بصری. به دلیل خطاهای GPS و حرکات اضافی واکرها، گاهی اوقات یک مسیر پیچیده روی نقشه ترسیم می شود و این اغلب باعث گمراهی و سردرگمی کاربران می شود. علاوه بر این، در ارائه متحرک، داده های خط سیر خام می تواند باعث پخش اضافی شود که ممکن است برای کاربران استرس زا باشد. بنابراین، هدف این مقاله پیشنهاد یک رویکرد نگاشت مسیر مفصل، یعنی روشی بود که بازبینی مبتنی بر نقشه را برای گردشگران و فراگیران برای درک و مسیریابی آسانتر میکند.
در بخش 2 ، مشکلاتی را که هنگام مرور دادههای خط سیر خام روی نقشه با آن مواجه میشوند، نشان میدهیم و یک رویکرد مفهومی برای حل آنها پیشنهاد میکنیم. سپس، در بخش 3 ، ما سهم عملی مقاله را از طریق پیشنهاد خود از یک تکنیک نگاشت مسیر مفصل متشکل از سادهسازی و توصیف، شفاف میکنیم. در بخش 4 ، چارچوب پیشنهادی را از طریق آزمایشهای کاربر با برنامه تور پیادهروی خود ارزیابی میکنیم و قابلیت اطمینان و قابلیت استفاده آن را ارزیابی میکنیم. در پایان مقاله، محدودیتها و چشمانداز نقشهبرداری مسیر مفصلی را در رابطه با برخی یافتههای بهدستآمده از آزمایشهای بخش 5 مورد بحث قرار میدهیم .
2. مشکلات و رویکردها
به منظور ارائه یک چارچوب جدید که میتواند به کاربران اجازه دهد تا دادههای خط سیر خام را به وضوح بررسی کنند، برخی از رویکردهای فنی به موضوع پیچیدگی بصری را در کارهای مرتبط در این بخش بررسی میکنیم. ما ابتدا برخی از مشکلات را با نمایش مبتنی بر نقشه دادههای خط سیر خام آشکار میکنیم.
2.1. مسائل داده های سیر خام بر اساس مشاهدات
شکل 2 نمونه ای از یک مسیر راه رفتن را نشان می دهد، تیrآw، روی نقشه بدون هیچ گونه پردازش داده. تیrآwیک مسیر مکانی-زمانی است که از مجموعه ای از داده ها تشکیل شده است (مند، لآتی، لon، ساعتآسUجیسی)، جایی که مندیک عدد منحصر به فرد است (0، 1، 2، …) لآتیو لonمختصات جغرافیایی هستند و ساعتآسUجیسییک مقدار بولی است که نشان میدهد آیا کاربر محتوایی (به عنوان مثال، یادداشتهای متنی، عکسها و/یا صدا) در نقطه داده شده ایجاد کرده است یا خیر. فاصله زمانی 15.0 ثانیه تعیین شد. مقادیر زمان مطلق هر رکورد در داده های مسیر را می توان هم از زمان شروع (مهر زمانی) داده ها و هم از تعداد بازه های زمانی شمارش ( id ) در مجموعه داده ها محاسبه کرد.
بر اساس مشاهدات ما از مثال در شکل 2 ، ما می توانیم سه مشکل را شناسایی کنیم که هنگام تفسیر ضبط واکر باعث ایجاد مشکل می شوند.
هنگامی که یک واکر برای مدتی می ایستد (مثلاً منتظر تغییر چراغ راهنمایی، نوشیدن آب و غیره) یا در یک منطقه کوچک حرکت می کند، یک خط درهم می تواند ظاهر شود. چنین قطعاتی باعث ایجاد انیمیشن ردیابی اضافی و پیچیدگی بصری برای بینندگان می شود.
هنگامی که واکر وارد یک ساختمان می شود (مثلاً امکانات گشت و گذار مانند موزه ها و آکواریوم ها)، خطاهای داده های GPS معمولاً به دلیل موانعی مانند سقف و دیوار بزرگتر می شود (مشکل B). این می تواند باعث سوء تفاهم کاربر از داده های مسیر شود. علاوه بر این، نگاه کردن به اطراف داخل ساختمان ممکن است بیش از 30 دقیقه طول بکشد. در نتیجه، مقدار قابل توجهی از داده های مسیر نادرست و اضافی می تواند تولید شود (مسئله B + مسئله A).
خطوط مسیر اغلب به دلیل خطاهای GPS و حرکت کاربر به روش های ناپایدار ترسیم می شوند. چنین خطوطی برای بینندگان زائد و خسته کننده است.
2.2. رویکردهای داده های مسیر مفصلی در کارهای مرتبط
به منظور حل مشکلات فوق و غنیسازی ارائه مسیر مبتنی بر نقشه تجربیات تور پیادهروی، ما یک رویکرد مفهومی در نقشهبرداری مسیر مفصل پیشنهاد میکنیم. این استراتژی شامل سادهسازی و توصیف است. به عبارت دیگر، این رویکرد بر بخشهای معنیدار یک مسیر تأکید میکند، بخشهای بیمعنا را به حداقل میرساند و سپس این دو مجموعه از قسمتها را به یکدیگر متصل میکند. در زمینه اطلاعات مکانی، برخی از ادبیات موجود مفاهیم مشابهی را ذکر کرده اند. به عنوان مثال، Spaccapietra و همکاران. یک مسیر را از نظر معنایی به توقف و حرکت تقسیم کرد [ 5]. این یک راه خوب برای تشخیص و بخش بندی مکان های مهم و غیر مهم بر اساس معیارهای خاص برای درک حرکت یک شی است. برنامه دیگری توسعه یافته است که فقط رویدادهای مهم را استخراج می کند و جدول زمانی مبتنی بر متن را تولید می کند [ 6 ]. با این حال، در این مقاله، تصمیم بر این شد که ارائه مبتنی بر نقشه مورد بحث قرار گیرد، زیرا این مزیت را دارد که افراد می توانند به صراحت اطلاعات جغرافیایی خود را به اشتراک بگذارند، به عنوان مثال، کاربران چگونه به مکان رسیده اند، و تجربیات آنها در کجا اتفاق افتاده است. بررسی تورهای پیاده روی
اولین عنصر بیان در ارائه مبتنی بر نقشه، ساده سازی است. برای تمیزتر کردن خطوط پیچیده، بسیاری از مطالعات بر روی مسائل ساده سازی خطوط، به ویژه در زمینه های گرافیک کامپیوتری و کارتوگرافی متمرکز شده اند. به عنوان مثال، الگوریتمهای داگلاس-پیکر [ 7 ] و الگوریتمهای رومان ویتکام [ 8 ] برخی از نقاط مرجع یک خط مسیر اصلی را بر اساس هندسه و تحمل فاصله آن کاهش میدهند. با این حال، حل مشکلات A و B برای آنها دشوار است. ضبط داخلی اغلب دارای خطاهای بزرگی است و این منجر به از دست رفتن مکاتبات با نقشه پایه می شود. تطبیق نقشه همچنین یکی از کاربردیترین تکنیکها برای نگاشت دادههای مسیر ناپایدار بر روی شبکههای جادهای است که از قبل تنظیم شده بودند [ 9 ، 10]]. با این حال، از نظر تورهای پیادهروی، ما باید شبکههای جادهای دقیقتری را در نظر بگیریم، زیرا مردم در یک شهر آزادتر از یک ماشین در حین رانندگی حرکت میکنند. علاوه بر این، برخی از مطالعات سعی کردهاند کسانی را که با علوم کامپیوتر و نقشهنگاری آشنایی ندارند، قادر سازند تا اشکال ارتباط مبتنی بر نقشه را توسعه دهند [ 4 ]. بنابراین، رویکرد ما تلاشی برای جلوگیری از پیشتنظیم مقیاس بزرگ دادههای مدل فضایی برای تطبیق نقشه به منظور تضمین تطبیق پذیری آن است.
دومین عنصر بیان، شخصیت پردازی است. بسیاری از کارهای مرتبط روشهایی را مورد بحث قرار دادهاند که فعالیتها و رویدادهای ارزشمند یک شی را برای تحلیل مسیر، پیشبینی آینده و فشردهسازی دادهها استخراج میکنند [ 11 ، 12 ]. در زمینه داده کاوی مسیر، خوشه بندی مسیر یکی از راه حل های اصلی برای شناسایی نقاطی است که کاربران در آن اقامت می کنند [ 10 ]. در همین راستا، کوانان و همکاران. [ 13 ] الگوریتمی بر اساس اطلاعات زمان و فاصله برای تشخیص مکانهای مهم پیشنهاد کرد. سایر محققان [ 14 ، 15] الگوریتم های پیشرفته ای را با در نظر گرفتن اطلاعات سرعت و جهت گیری برای استخراج مکان های معنایی پیشنهاد کرده اند. با این حال، این الگوریتم ها نمی توانند تفاوت بین مسئله A و مسئله B را حل کنند و همچنین ممکن است آنها را به عنوان یک موضوع باقی مانده در نظر بگیرند. بر این اساس، ما با رویکرد خود مسئله A را از مسئله B متمایز می کنیم زیرا اطلاعاتی مانند انتظار برای چراغ راهنمایی یا بستن مجدد بند کفش از نظر تجربیات واکر اهمیت کمتری دارد. با این حال، برخی الگوریتمها بر اساس مناطق از پیش تعیین شده مورد علاقه (ROI) وجود دارند که در تشخیص این دو مشکل مؤثر هستند. نمونهای از الگوریتم مبتنی بر بازگشت سرمایه، توقفها و حرکتهای مسیرهای مبتنی بر تقاطع (IB-SMoT) است، که اگر مدت زمان بازگشت سرمایه متقاطع مسیر از یک زمان معین بیشتر باشد، میتواند مکانهای مهمی را شناسایی کند [ 16 ، . ]. با این حال، IB-SMoT کامل نیست، زیرا ROI ممکن است به دلیل دادههای GPS مشکل B با خطاهای بزرگ، هیچ تقاطعی با دادههای مسیر نداشته باشد. حتی اگر یک واکر برای مدتی در داخل ساختمان بماند، گاهی اوقات ممکن است نقاط مکان در خارج از آن ثبت شود. بنابراین، حل این مسائل تنها با داده های مکانی-زمانی ممکن است دشوار باشد. برای تشخیص وضعیت کاربر، برخی از مقالات گزارش کرده اند که حسگرهای مختلف می توانند راه حل های امیدوارکننده ای باشند [ 18 ، 19 ]. روش ما سایر اطلاعات فضایی، به جز دادههای مکان، را برای استخراج مناسب نقاط اقامت بررسی کرد.
از نظر شخصیت پردازی، تجسم محتوای تولید شده توسط کاربر (UGC)، مانند عکس ها و یادداشت های شخصی نیز بسیار مهم است. در تورهای پیاده روی، کاربران اغلب و به طور طبیعی در طول مسیر عکس می گیرند و یادداشت های شخصی می کنند. از این رو، آن نقاط هسته ارائههای پیادهروی کاربران هستند، یعنی مسیرهای بیان شده. در پایان این بخش، ما یک جدول مطابقت بین مسائل نیازمند حل و رویکردهای مفهومی خود را در جدول 1 گردآوری کردیم .
3. روش: نگاشت مسیر مفصلی
3.1. بررسی اجمالی
هدف روش پیشنهادی تسهیل درک مبتنی بر نقشه از داده های ثبت شده بود. ما با انتزاع قسمت های اضافی یک مسیر به این امر دست یافتیم. شکل 3 جریان سیستم پیشنهادی را نشان می دهد. هنگامی که در یک تور پیاده روی هستید، سیستم ضبط داده های مکانی، از جمله داده های موقعیت یابی مانند طول و عرض جغرافیایی، دقت افقی GPS و شتاب را جمع آوری می کند. در همان زمان، سوابق چند رسانه ای (به عنوان مثال، عکس یا متن) با داده های موقعیت یابی توسط کاربر ایجاد می شود. پس از آن، هنگامی که کاربران در حال بررسی دادهها هستند، سیستم پیشنهادی یک خط سیر مفصلی را با: (1) استخراج نقاط UGC ایجاد میکند. (2) تشخیص نقاط داخلی و خارجی با داده های دقت افقی GPS و محاسبه نقاط مکان داخلی ( بخش 3.2)) (3) تشخیص راه رفتن و توقف با داده های شتاب و حذف نقاطی که کاربر در آن ساکن می ماند ( بخش 3.3 ). (4) پردازش الگوریتم داگلاس-پوکر ( بخش 3.4 ). و (5) یکپارچه سازی نتایج. علاوه بر این، چارچوب از قبل به هیچ داده مدل فضایی نیاز ندارد.
3.2. تشخیص داخلی و خارجی
در تشخیص حرکت داخل و خارج، سیستم پیشنهادی از اطلاعات دقت افقی GPS محاسبه شده بر روی گوشی هوشمند استفاده می کند. اساسا داده های GPS برای استفاده در فضای باز و بر اساس سیستم های ماهواره ای طراحی شده اند. با این حال، اگر در داخل خانه باشد، مقدار دقت به دلیل موانعی مانند سقف و دیوار کاهش می یابد. این ویژگی های مقدار دقت برای نقاط تشخیص مکان های داخلی در سیستم پیشنهادی استفاده می شود.
شکل 4 الگوریتمی را برای تشخیص نقاط مکان داخلی نشان می دهد. آیفون اپل میتواند «شعاع قطعیت مکان، اندازهگیری شده بر حسب متر» [ 20 ] را بهعنوان درجهای از دقت GPS تعیین کند، بهطوری که هر نقطه از یک مسیر با یک آستانه مشخص در داخل یا خارج از منزل قضاوت میشود. به طور کلی، چندین نقطه در داخل خانه به طور مداوم مرتب می شوند. بنابراین، سیستم پیشنهادی می تواند آنها را به عنوان یک مجموعه در نظر بگیرد و با محاسبه نقطه مرکزی حداقل جعبه مرزی آن، یک نقطه مکان داخلی را انتزاع کند ( شکل 5 ).
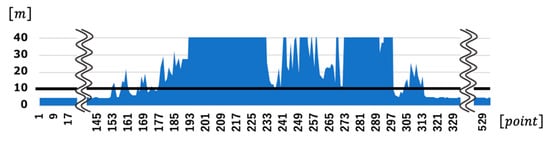
در برخی آزمایشهای کاربر، مشخص شد که الگوریتم پیشنهادی در بالا گاهی اوقات در صورتی که کاربر در خارج از منزل باشد در حالی که کاربر هنوز در داخل خانه است، اشتباه قضاوت میکند. شکل 6 دقت افقی داده های GPS را در زمانی که کاربر در یک زمان برای مدت معینی در یک ساختمان می ماند، نشان می دهد. مدت زمان از نقطه 10 تا نقطه 58 مربوط به زمانی است که کاربر در ساختمان اقامت داشته است. این یک قانون کلی را نشان می دهد که مقادیر خطای افقی زمانی که کاربر در فضای باز است کمتر از 10 متر و زمانی که کاربر در داخل خانه است بیشتر از 15 متر است. با این حال، همانطور که در نشان داده شده است، برخی استثناها در حدود نقطه 49 به وجود آمدندبا این حال، همانطور که در شکل 6. در آن نقطه، دقت افقی خواندن در فضای داخلی خوب بود، و همین را می توان در مورد خواندن در فضای باز نیز گفت. این استثناها اغلب ممکن است زمانی رخ دهند که کاربر در نزدیکی پنجره های داخل ساختمان قرار دارد. قضاوت نادرست در مورد مکان های داخلی ممکن است تعداد نقاط اقامت مرتبط با علاقه کاربر را افزایش دهد، حتی اگر کاربر فقط از یک مکان بازدید کند. برای حل مشکل قضاوت نادرست مکانهای داخلی، مفهوم بافر فاصله متحمل را به روش پیشنهادی معرفی میکنیم تا آن را قویتر کنیم. شکل 7).). بافر فاصله متحمل می تواند مقادیر بالای تصادفی خارج از دقت افقی را نادیده بگیرد و وضعیت کاربر را در داخل خانه حفظ کند در حالی که کاربر ممکن است در نزدیکی بیرون قرار داشته باشد. کنترل استثنایی دقت افقی برای قضاوت در صورتی که کاربر در داخل خانه است، با این قاعده کلی مشخص می شود که اگر فاصله بین نقطه مرکزی منطقه داخلی و موقعیت فعلی کاربر تقریباً یکسان باشد، کاربر ممکن است به عنوان فضای داخلی شناخته شود. مانند موارد معمول در داخل خانه بودن.
3.3. راه رفتن و توقف شناخت
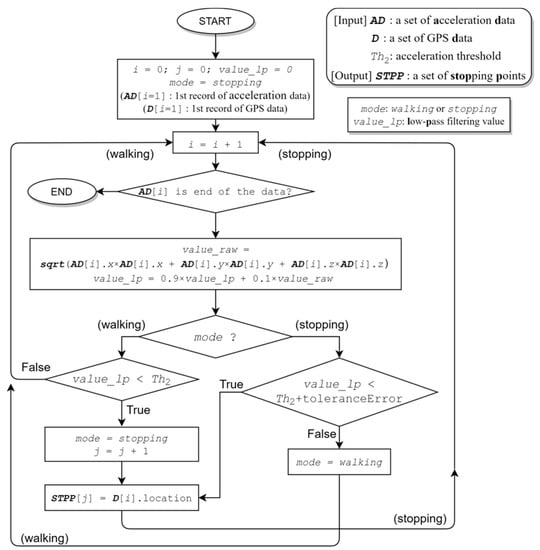
در تشخیص شرایط فعالیت راه رفتن و توقف، سیستم پیشنهادی از مقادیر شتاب استفاده میکند که در تلفنهای هوشمند موجود است [ 21 ]. شکل 8 الگوریتمی را برای تشخیص نقاط ساکن باقی مانده کاربر نشان می دهد. آیفون اپل می تواند مقادیر شتاب سه محوره را ارائه دهد (آD.ایکس، آD.y، آD.z)توسط سنسور شتاب سنج اندازه گیری می شود. سیستم پیشنهادی ما از مقادیر شتاب استفاده می کند و یک جذر مجذور مجذور مقادیر را برای تشخیص محاسبه می کند. علاوه بر این، از آنجایی که یک مقدار شتاب خام سطح نویز بالایی دارد، ما از یک فیلتر پایین گذر برای کاهش نویز استفاده کردیم. فرمول فیلتر پایین گذر به شرح زیر است:
شکل 9 نمونه ای از تغییرات مقادیر شتاب را با معرفی فیلتر پایین گذر نشان می دهد. ک=0.1). به طور کلی، مقادیر شتاب هنگام راه رفتن افزایش می یابد، بنابراین الگوریتم می تواند بین راه رفتن و توقف در آستانه تمایز قائل شود. تیساعت2. علاوه بر این، ما اقدامات بیشتری را برای کاهش دو وضعیت جایگزین انجام دادیم. یکی به آرامی راه می رفت و دیگری لحظه ای حرکت می کرد. یک حرکت لحظه ای اغلب زمانی اتفاق می افتد که کاربر یک گوشی هوشمند را برای گرفتن عکس بلند می کند. در مورد اولی، فرآیندی که آستانه را بازنشانی می کند تیساعت2به صورت پویا در حل این موضوع موثر است ( شکل 9 ). برای حل مشکل دوم، ما به دنبال یک نقطه راه رفتن بین نقاط توقف گشتیم و پس از اجرای الگوریتم آن را به نقطه توقف تبدیل کردیم.
3.4. ساده سازی خط
همانطور که در بخش 2 ذکر شد ، الگوریتم های موثر مختلفی برای تمیز کردن خطوط پیچیده وجود دارد. در این مقاله، ما الگوریتم داگلاس-پوکر [ 7 ] را برای نقاط غیر خاص به کار بردیم و سپس خط ساده شده را با نقاط ویژه استخراج شده به عنوان ابزاری برای ترسیم یک مسیر مفصلی ادغام کردیم. در این بخش، الگوریتم ساده سازی خط مورد استفاده برای نهایی کردن یک مسیر مفصلی را معرفی می کنیم.
فرآیند الگوریتم داگلاس-پوکر در شکل 10 نشان داده شده است . در ابتدا، اولین نکته پfمنrستیو نکته آخر پلآستی از مسیر انتخاب شدند. سپس، ما به دنبال یک نقطه بودیم دمترآایکس، بزرگترین فاصله از خط مستقیم لپfمنrستیپلآستی. اگر دمترآایکسبیشتر از آستانه داده شده بود تیساعت3نقطه به عنوان نقطه مرجع مسیر جدید نگه داشته شد و ما مسیر را به دو بخش تقسیم کردیم. یک بخش شامل مجموعه ای از پfمنrستیبه نقطه ( سهgمترهnتی1) و دیگری شامل مجموعه ای از نقطه به پلآستی( سهgمترهnتی2). پس از آن، فرآیند فوق را برای هر بخش به صورت بازگشتی اعمال کردیم تا دمترآایکسکوتاه تر از تیساعت3. در نهایت، مسیر جدید توسط نقاط مرجع ارائه شد.
4. آزمایش ها و نتایج
برای ارزیابی امکانسنجی روش پیشنهادی، آزمایشهای کاربر را شامل دوازده نفر شرکتکننده در تورهای پیادهروی با استفاده از یک برنامه کاربردی تلفن هوشمند که توسط اولین نویسنده این مقاله با آکیتا سیتی توسعه داده شده بود، انجام دادیم. هدف از آزمایشها ارزیابی قابلیت اطمینان روش پیشنهادی نقشهبرداری مسیر مفصلی بود. عوامل کلیدی برای اطمینان از قابلیت اطمینان بالا دو آستانه هستند ( تیساعت1، تیساعت2) برای خطاهای افقی GPS و مقادیر شتاب. این دو آستانه از طریق بررسی بهترین ترکیبها برای کاهش تعداد موقعیتهای قضاوت نادرست کاربران تعیین شد. ما از ضبط دادههای ویدیویی کاربرانی که از تورهای پیادهروی با برنامه تلفن هوشمند قدردانی میکنند برای تخمین صحت نتیجه از روش نقشهبرداری مسیر مفصل استفاده کردیم.
شکل 11 یک نقشه مصور را نشان می دهد که در برنامه تور پیاده روی برای آزمایش های کاربر استفاده شده است. این نقشه مسیر “Ushu-Kaido (羽州街道)” را نشان می دهد، که یک مسیر فرعی و تاریخی مهم است که در عصر ادو (قرن 17 تا 19) در ژاپن ایجاد شد و از منطقه مرکزی به شمال از طریق شهر آکیتا متصل می شود، جایی که دانشگاه نویسندگان واقع شده است. یک مسیر پیشنهادی روی نقشه از نقاط مختلف تاریخی و فرهنگی، از جمله مکانهای میراث و امکانات میگذرد. آزمودنی ها توانستند با استفاده از اپلیکیشن تور پیاده روی آزادانه مسیر توصیه شده را طی کنند.
ابتدا، انیمیشنهای تجسمی دادههای مسیر که دو نمونه از (الف) نقشهبرداری خط سیر خام و (ب) نقشهبرداری مسیر مفصلی را نشان میدهند را میتوان بهعنوان ویدیوهای YouTube مشاهده کرد (نقشهگذاری مسیر خام: https://youtu.be/Jcvf-WWPUwA ؛ مسیر مفصلی نقشه برداری: https://youtu.be/cpw1GxZQSHU ). همانطور که در شکل 12 الف نشان داده شده است، بدون هیچ گونه پردازشی برای ساده سازی، خطوط درهم و ناپایدار بر روی نقشه نمایش داده شدند . در مقابل، نتیجه پردازش ساده سازی خودکار خطوط تمیز و پایدار را ترسیم کرد ( شکل 12 ب). شکل 12 ب نتیجه خوبی از نگاشت مسیر مفصلی را نشان می دهد تیساعت1(تشخیص داخلی و خارجی) تنظیم شده است 10.0 مترو تیساعت2(تشخیص راه رفتن و توقف) تنظیم می شود 0.1 جی. ما بهترین ترکیب از پارامترهای مختلف ممکن را برای ایجاد نتایج نادرست کمتر در نگاشت مسیر مفصلی در زیر مورد بحث قرار خواهیم داد.
نحوه انتخاب مقدار مناسب آستانه را توضیح می دهیم تیساعت1، که قضاوت می کند که کاربر در داخل یا خارج از خانه است. جدول 2 قضاوت های اشتباه در آزمایش ها را نشان می دهد. Eس(Errorستیآyمنng)به معنی تعداد قضاوت های اشتباه در نقاط اقامت کاربر در خارج از منزل است. Enس(Errornoتیاستیآyمنng)به تعداد قضاوتهای اشتباه در نقاط عدم حضور کاربر در داخل خانه اشاره دارد. اگر تیساعت1کوچکتر است، روش تشخیص مفصلی بیش از حد حساس می شود و نقاط نادقیق بیشتری برای ماندن شناسایی می شود، حتی اگر کاربر در حال راه رفتن در بیرون باشد، زیرا شعاع اطمینان مکان گاهی اوقات به دلیل اختلال رادیویی بزرگتر می شود. اگر تیساعت1بزرگتر است، روش تشخیص مفصل بسیار غیر حساس می شود و نقاط بیشتری از عدم ماندن، به عنوان مثال، نقاط بیرونی، شناسایی می شوند، حتی اگر کاربر در داخل خانه حرکت کند ( شکل 13 ). این نوع پدیده ممکن است زمانی اتفاق بیفتد که کاربر در حال حرکت در نزدیکی پنجره های داخل خانه است. در نتیجه، چندین نقطه از اقامت را می توان برای یک مکان سرپوشیده تجسم کرد، حتی اگر کاربر هنوز در داخل یک ساختمان حرکت کند. علاوه بر این، می تواند یک خط مسیر پیچیده را همانطور که هستند حفظ کند و آن را ساده نکند.
با توجه به آزمایشات کاربر، تیساعت1=10.0 متربه عنوان یک مقدار مناسب برای ایجاد نقاط مناسب اقامت یافت شد. شکل 14 نمونه هایی از تغییرات در شعاع قطعیت مکان را به عنوان خطای افقی GPS در زمانی که کاربر در داخل خانه می ماند نشان می دهد. چندین قسمت به زیر آستانه جابجا می شوند تیساعت1حتی اگر کاربر در حال حرکت در داخل خانه باشد. با این حال، تشخیص اشتباه را می توان با استفاده از روش های بهبود یافته بافر فاصله متحمل، که در بخش 3.2 مورد بحث قرار گرفت، اجتناب کرد . شکل 15 نشان می دهد که روش نگاشت مفصلی چقدر موثر است. در این حالت، یک خط پیچیده و درهم را به یک خط ساده تبدیل کرد و تعداد مناسبی از مکانها را در داخل خانه ایجاد کرد. تیساعت1تنظیم کنید 10.0 متر.
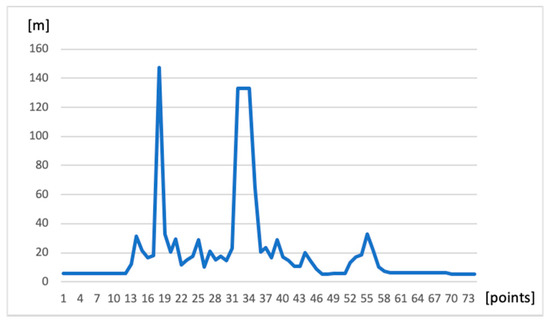
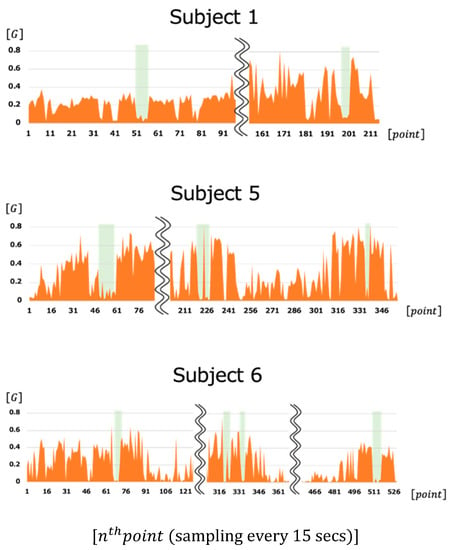
در ادامه، روش تشخیص راه رفتن یا توقف را مورد بحث قرار می دهیم. شکل 16 سه نمونه را در داده های آزمایشی از تغییرات مقادیر شتاب زمانی که کاربران تورهای پیاده روی را تجربه می کردند، نشان می دهد. مناطق سبز روشن مدت زمان مربوط به خطوط مسیر درهم را نشان می دهد که کاربران در خارج از منزل توقف می کنند، به عنوان مثال، منتظر علائم راهنمایی و رانندگی هستند. با توجه به نتایج آزمایش های کاربر، آستانه شتاب ( تیساعت2) ممکن است برای قضاوت در مورد اینکه کاربر در حال توقف یا راه رفتن است مناسب باشد. در واقع، از آنجایی که تغییرات در مقادیر شتاب به ویژگیهای فردی و زمان گذر بستگی دارد، تصمیمگیری مناسبترین مقدار آستانه آسان نیست. در مقابل، با توجه به آزمایشات، مورد ایجاد خطوط مسیر درهم پیچیده آشکار می شود. این خطوط ممکن است گاهی اوقات زمانی اتفاق بیفتند که مقادیر شتاب بین 0.0 و 0.1G نگه داشته شوند. بدین ترتیب، تیساعت2تنظیم فاصله بین 0.1G و 0.2G برای حالت توقف می تواند نتایج خوبی برای از بین بردن خطوط مسیر درهم پیچیده داشته باشد و بررسی خطوط مسیر ساده شده را برای کاربران آسان تر کند. شکل 17 نتایج ساده سازی خطوط مسیر درهم با تنظیم را نشان می دهد تیساعت2=0.1 جی.
5. بحث
بیشتر خدمات مبتنی بر مکان برای به تصویر کشیدن زمینههای پیچیده و متنوع انسانهایی که در فضای واقعی از طریق دادههای دیجیتالی عمل میکنند، مورد نیاز هستند [ 12 ، 13 ]. بنابراین، درک انواع محیط های خارجی (به عنوان مثال، آب و هوا، ساختمان های اطراف، و زمین) و رفتارهای غیرمنتظره ناشی از آنها ضروری است. در این بخش، برخی از موارد کشف شده در آزمایش خود در محیط های واقعی تورهای پیاده روی را مورد بحث قرار می دهیم و چشم انداز تحقیق و توسعه خود را مورد بحث قرار می دهیم.
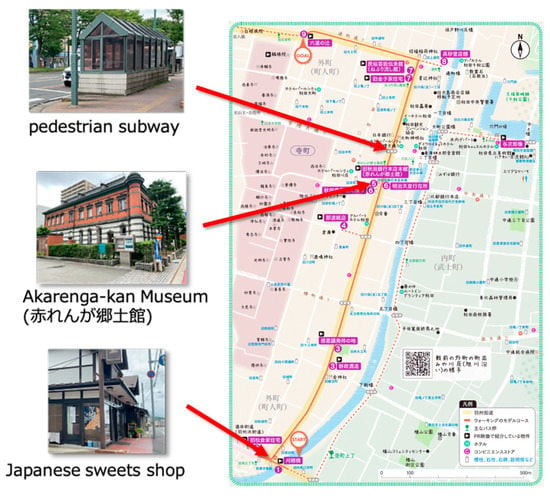
در ژاپن، متروهای عابر پیاده معمولاً در جاده های شلوغ نصب می شوند تا به پیاده روی ها کمک کنند تا از آنها عبور کنند. آزمایشهای ما نشان داد که روش پیشنهادی، این نقاط را به عنوان یک نقطه ماندن در نظر میگیرد (شش مورد از شش مورد). با این حال، ممکن است بحث برانگیز باشد که آیا آنها باید روی نقشه ها تجسم شوند. علاوه بر این، از هر دوازده نفر، شش نفر از متروهای عابر پیاده استفاده کردند. این نشان می دهد که بسیاری از پیاده روی ها احتمالاً از آنها در تورهای پیاده روی استفاده می کنند.
در ژاپن مغازه های نیمه سرپوشیده ای وجود دارد که ورودی های شیشه ای دارند و اقلامی در آنجا به نمایش گذاشته می شوند. در آزمایشهای ما، حتی اگر پیادهروها در چنین مغازههایی توقف کنند، نقاط اقامت آنها در آنجا تجسم نشده است. به عبارت دیگر، سیستم پیشنهادی در مواردی که به پنجره یا در شیشه ای نزدیک است، فرد را در داخل خانه قضاوت نمی کند. یکی از معاینهشوندگان که از یک شیرینیفروشی ژاپنی بازدید کرده بود ( شکل 19 ) فکر میکرد که باید آن را به عنوان نقطهای برای اقامت تجسم کرد. بنابراین، ما تعداد مواردی را که بهعنوان داخل خانه اشتباه ارزیابی شدهاند (مثلاً سلول داخل) شمارش کردیم تیساعت1=10.0 متراز استوبjهجتی منD2 در جدول 2 ).
در این مقاله، ما روشی را برای قضاوت مکانهای داخلی و خارجی از طریق قدرت سیگنال GPS پیشنهاد کردیم. اما در مواردی به نظر می رسد که قضاوت در مورد اینکه یک نقطه در داخل یا خارج از منزل است و اینکه یک نقطه داخلی معنی دار یا بی معنی است، از فردی به فرد دیگر متفاوت است. بنابراین، قابل بحث است که آیا چارچوب ما باید مثالهای بالا را به عنوان نقاط ماندگاری تجسم کند. در کار آینده، ما به نظرسنجی های بیشتر از کاربران در مورد تجسم نقاط اقامت و خدماتی نیاز داریم که به کاربران اجازه می دهد نظرات خود را ویرایش کنند. در پایان این مقاله، مکان های POI که در آزمایش ها ظاهر می شوند در شکل 20 نشان داده شده است .
6. نتیجه گیری
مردم از یادگیری در مورد فرهنگ و تاریخ از طریق تورهای پیاده روی در دنیای واقعی لذت می برند. برای افزایش ارزش این فعالیت، ما یک برنامه کاربردی مبتنی بر مکان برای پشتیبانی نه تنها از خود تورهای پیادهروی بلکه همچنین بررسی تجربیات گردشگران پس از تور ایجاد کردیم. در این مقاله، مکانیسمهای پشتیبانی از دومی را مورد بحث قرار دادیم که دارای نمایشهای مسیر مبتنی بر نقشه و انیمیشنهای ردیابی است. ابتدا، ما برخی از مشکلات را با نمایش مبتنی بر نقشه دادههای خط سیر خام شناسایی کردیم. سپس، ما نقشه مسیر مفصلی را برای بررسی کاربر محور پیشنهاد کردیم. برای از بین بردن مشکلاتی که ممکن است به وجود بیاید، چارچوب پیشنهادی نه تنها بر سادهسازی، بلکه بر خصوصیات با استفاده از منابع اطلاعات مکانی مختلف تمرکز داشت. به داده های مدل فضایی که از قبل به عنوان روش های تطبیق نقشه از پیش تعیین شده اند، نیاز ندارد. بنابراین اجرای آن ساده و مقرون به صرفه خواهد بود. آزمایشهای دنیای واقعی که با برنامه تلفن همراه توسعهیافته ما بر روی یک تلفن هوشمند انجام شد، قابلیت اطمینان عملی و اثربخشی چارچوب پیشنهادی برای تورهای پیادهروی واقعی را با استفاده از مقادیر آستانه امکانپذیر بهدستآمده از آزمایش GPS و سنسورهای شتاب نشان داد. بنابراین، سهم اصلی این مقاله ارائه محیطهای سیار جدید و بهتر با محوریت انسان با نگاشت مسیر مفصل برای کاربران نهایی است تا به راحتی و فعالانه مسیرها و تجربیات فضایی گذشته خود را با خود آینده و دیگران به اشتراک بگذارند. در نهایت، این پروژه بخشی از مجموعه گستردهتری از تحقیقات است که تا آنجا که تلاش میکند فعالیتهای پس از تور را غنی کند، باید مردم در سراسر جهان را تشویق کند تا ارزش محل زندگی ما را درک کنند و به اشتراک بگذارند. آزمایشهای دنیای واقعی که با برنامه تلفن همراه توسعهیافته ما بر روی یک تلفن هوشمند انجام شد، قابلیت اطمینان عملی و اثربخشی چارچوب پیشنهادی برای تورهای پیادهروی واقعی را با استفاده از مقادیر آستانه امکانپذیر بهدستآمده از آزمایش GPS و سنسورهای شتاب نشان داد. بنابراین، سهم اصلی این مقاله ارائه محیطهای سیار جدید و بهتر با محوریت انسان با نگاشت مسیر مفصل برای کاربران نهایی است تا به راحتی و فعالانه مسیرها و تجربیات فضایی گذشته خود را با خود آینده و دیگران به اشتراک بگذارند. در نهایت، این پروژه بخشی از مجموعه گستردهتری از تحقیقات است که تا آنجا که تلاش میکند فعالیتهای پس از تور را غنی کند، باید مردم در سراسر جهان را تشویق کند تا ارزش محل زندگی ما را درک کنند و به اشتراک بگذارند. آزمایشهای دنیای واقعی که با برنامه تلفن همراه توسعهیافته ما بر روی یک تلفن هوشمند انجام شد، قابلیت اطمینان عملی و اثربخشی چارچوب پیشنهادی برای تورهای پیادهروی واقعی را با استفاده از مقادیر آستانه امکانپذیر بهدستآمده از آزمایش GPS و سنسورهای شتاب نشان داد. بنابراین، سهم اصلی این مقاله ارائه محیطهای سیار جدید و بهتر با محوریت انسان با نگاشت مسیر مفصل برای کاربران نهایی است تا به راحتی و فعالانه مسیرها و تجربیات فضایی گذشته خود را با خود آینده و دیگران به اشتراک بگذارند. در نهایت، این پروژه بخشی از مجموعه گستردهتری از تحقیقات است که تا آنجا که تلاش میکند فعالیتهای پس از تور را غنی کند، باید مردم در سراسر جهان را تشویق کند تا ارزش محل زندگی ما را درک کنند و به اشتراک بگذارند. سهم اصلی این مقاله ارائه محیطهای سیار جدید و بهتر با محوریت انسان با نقشهبرداری مسیر مفصل برای کاربران نهایی است تا مسیرها و تجربیات فضایی گذشته خود را به راحتی و به طور فعال با خود آینده و دیگران به اشتراک بگذارند. در نهایت، این پروژه بخشی از مجموعه گستردهتری از تحقیقات است که تا آنجا که تلاش میکند فعالیتهای پس از تور را غنی کند، باید مردم در سراسر جهان را تشویق کند تا ارزش محل زندگی ما را درک کنند و به اشتراک بگذارند. سهم اصلی این مقاله ارائه محیطهای سیار جدید و بهتر با محوریت انسان با نقشهبرداری مسیر مفصل برای کاربران نهایی است تا مسیرها و تجربیات فضایی گذشته خود را به راحتی و به طور فعال با خود آینده و دیگران به اشتراک بگذارند. در نهایت، این پروژه بخشی از مجموعه گستردهتری از تحقیقات است که تا آنجا که تلاش میکند فعالیتهای پس از تور را غنی کند، باید مردم در سراسر جهان را تشویق کند تا ارزش محل زندگی ما را درک کنند و به اشتراک بگذارند.


















بدون دیدگاه