

نگاشت حساسیت زمین لغزش کم عمق ناشی از بارندگی در دو حوضه مجاور با استفاده از الگوریتم های پیشرفته یادگیری ماشین
خلاصه

کلید واژه ها:
شبکه عصبی عمیق ؛ افزایش گرادیان شدید ؛ جنگل تصادفی ; حساسیت زمین لغزش
چکیده گرافیکی
1. معرفی
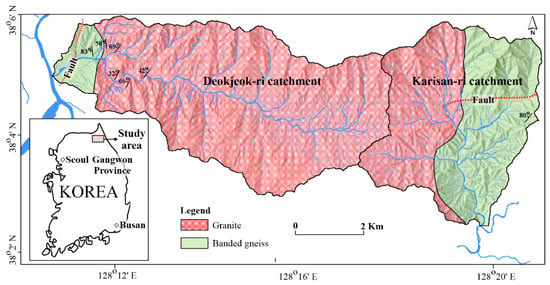
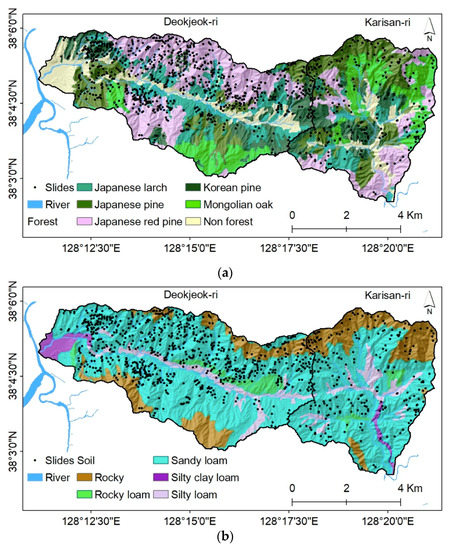
2. شرح منطقه مطالعه
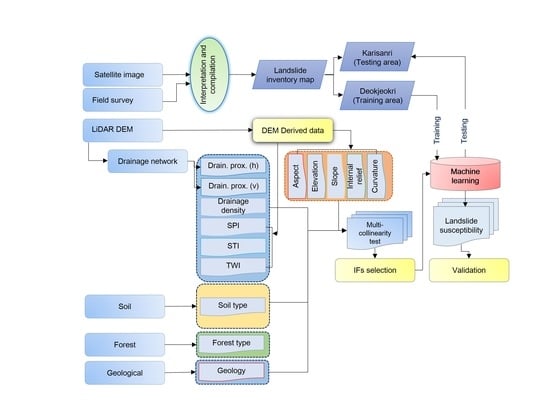
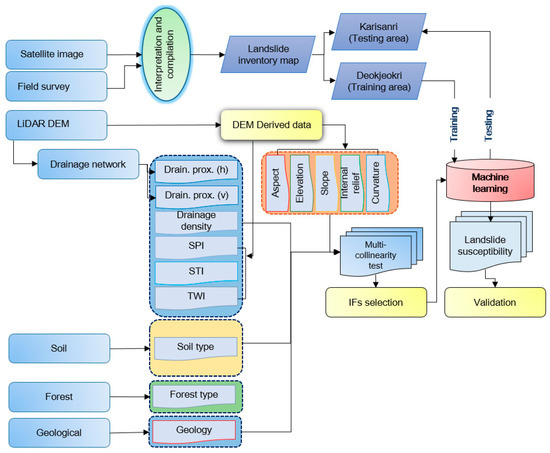
3. مجموعه داده ها و روش های جمع آوری شده
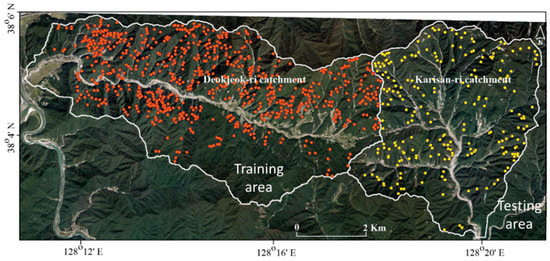
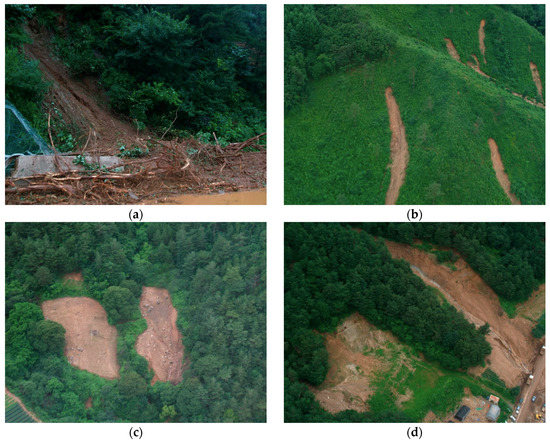
3.1. فهرست زمین لغزش
3.2. عامل تأثیرگذار زمین لغزش (IF)
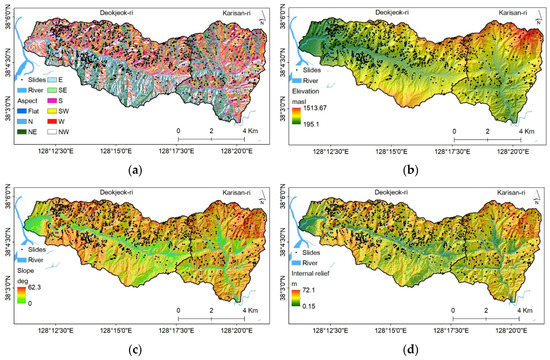
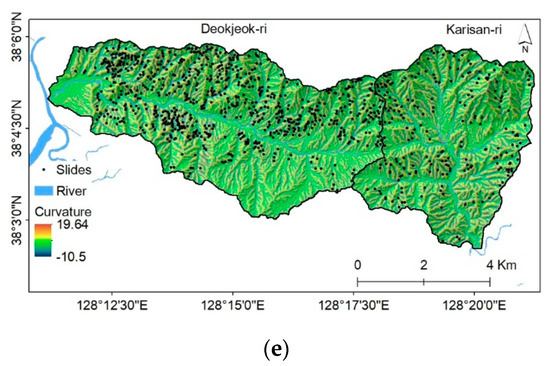
3.2.1. عوامل توپوگرافی
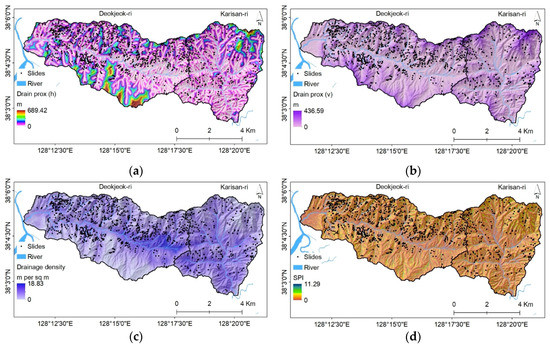
3.2.2. عوامل هیدرولوژیکی
SPI فرآیندهای فرسایشی را نشان می دهد که ناشی از رواناب است. با افزایش سطح حوضه خاص و شیب شیب، مقدار آب کمک شده توسط شیب بالا و رواناب سطحی نیز افزایش می یابد [ 52 ]. معادله (1) SPI را تعریف می کند:
که در آن As حوضه خاص است و β شیب شیب است. توزیع فضایی SPI در شکل 5 d ارائه شده است.
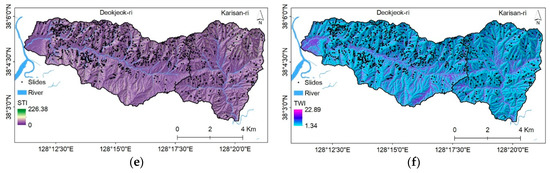
STI قدرت فرسایشی زهکش سرریز و فرآیند فرسایش و رسوب را منعکس می کند. برای محاسبه STI، دو جزء از شیب که مسئول از دست دادن خاک هستند، یعنی طول (L) و شیب (S) در نظر گرفته شد، همانطور که توسط مور و برچ (1986) [53]، ارائه شده در معادله (2) ارائه شده است . ،
که در آن As حوضه خاص است و β شیب شیب است. توزیع فضایی STI در شکل 5 e نشان داده شده است.
TWI به شرایط خاک و رواناب سطحی مربوط می شود [ 54 ]. TWI تمایل آب به تجمع در حوضه آبریز و تمایل نیروهای گرانشی به حرکت در شیب پایین است [ 55 ]. TWI به صورت تعریف شده است
جایی که α سطح شیب تجمعی و β زاویه شیب است. توزیع TWI در منطقه مورد مطالعه در شکل 5 f نشان داده شده است.
3.2.3. عوامل جنگل و خاک
3.2.4. عامل زمین شناسی
3.3. رویکردهای مدلسازی
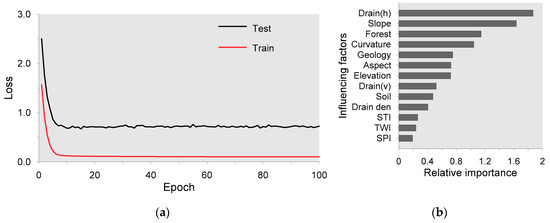
تعداد IF ها را می توان از طریق آزمایش چند خطی به حداقل رساند و داده های با ابعاد بالا را کاهش داد. برای تجزیه و تحلیل حساسیت، IF ها از طریق یک آزمون چند خطی مورد بررسی قرار گرفتند، که برای انتخاب IF های قابل اجرا مفید است. تورم واریانس (VIF) و تحمل (TOL) دو شاخص سطح چند خطی هستند [ 61 ، 62 ]. یک مقدار VIF برجستهتر یا معادل 5 و یک مقدار TOL زیر 0.2 یک مسئله چند خطی واقعی را نشان میدهد [ 63 ، 64 ]:
که در آن ضریب تعیین ( R2 ) نسبت واریانس در متغیر هدف است [ 65 ، 66 ، 67 ] .
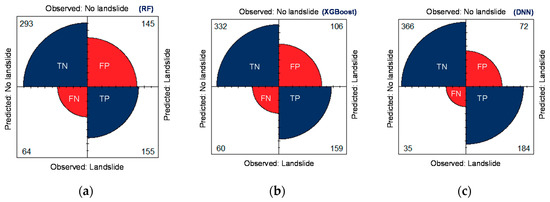
به منظور مقایسه پایایی نقشه های حساسیت زمین لغزش به دست آمده، تفاوت در سه روش حساسیت زمین لغزش در یک جدول احتمالی 2 × 2 ارزیابی شد. تعداد زمین لغزشها و غیرلغزشهای پیشبینیشده درست با TP (مثبت واقعی) و TN (منفی واقعی) نشان داده میشوند و تعداد زمین لغزشها و غیرلغزشهای پیشبینی نادرست به ترتیب FN (منفی نادرست) و FP (مثبت غلط) هستند. . هدف روشهای پیشبینی دو کلاسه، جداسازی موارد واقعی از موارد نادرست است. بر اساس چهار توصیفگر، چندین معیار دیگر قابل محاسبه است. حساسیت که به آن نرخ مثبت واقعی ( TPR ) و ویژگی (نرخ منفی واقعی) نیز گفته می شود.TNR ) نسبت موارد زمین لغزش و غیر لغزش را نشان می دهد که به درستی توسط مدل های حساسیت به زمین لغزش شناسایی شده است. دقت ( ACC ) به طبقه بندی صحیح شاخص اشاره دارد. مبنای ریاضی این پارامترها [ 71 ] در معادلات (6) – (8) آورده شده است:
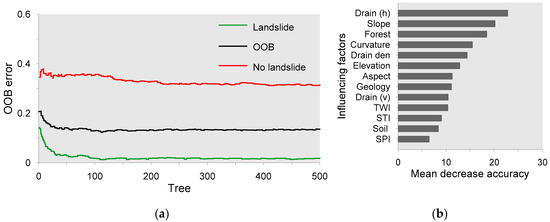
3.3.1. جنگل تصادفی (RF)
الگوریتم آموزشی برای RF از تکنیک عمومی بوت استرپ جمعآوری یا بستهبندی برای دانشآموزان درختی استفاده میکند. مجموعه آموزشی شامل یک روش ساده و سریع برای یادگیری یک تابع است که متغیر وابسته (هدف) X 0 و داده های مستقل IF (X 1 , X 2 ,…..,X n ) را به خروجی Y i ترجمه می کند ، جایی که (X 1 , X 2 ,…..,X n ) می تواند ترکیبی از متغیرهای طبقه ای و عددی باشد. X 0 می تواند برای طبقه بندی باینری یا برای رگرسیون عددی باشد. پس از آموزش نقطه پرس و جو x ، هر درخت به طور مستقل میانگین Y i را پیش بینی می کندهمانطور که در معادلات (9) و (10) نشان داده شده است.
و جنگل میانگین پیش بینی های هر درخت را محاسبه می کند
جایی که آn( x )آ�(ایکس)نشان دهنده برگ حاوی x و نه(آn( x ) )نه(آ�(ایکس))تعداد نقاط تخمینی را که شامل می شود نشان می دهد.
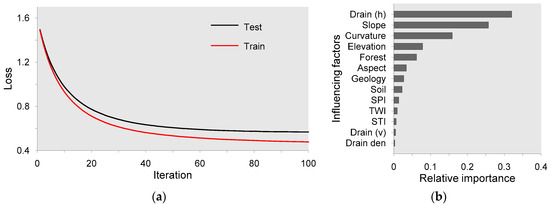
3.3.2. تقویت گرادیان شدید (XGBoost)
XGBoost بر اساس مفهوم Gradient Boosting است. از رسمی سازی مدل منظم تر برای کنترل بیش از حد برازش استفاده می کند که عملکرد بهتری به آن می دهد. توسط Chen and Guestrin (2016) [ 75 ] توسعه داده شد . در XGBoost آموزش با استفاده از یک استراتژی افزایشی انجام می شود. با توجه به نمونههای i با دادههای مستقل IF (X 1 ، X 2 ، …، X n )، و یک مدل مجموعه درختی از تابع افزودنی K برای پیشبینی خروجیهای Y استفاده میکند .
که در آن F مجموعه تمام درختان ممکن است. این fک�کیک تابع در هر یک از مراحل k مقادیر توصیفگر در استایکسمنایکسمنبه یک خروجی خاص تابع ضرر قابل تمایز که تفاوت بین پیش بینی ها و هدف را اندازه گیری می کند، به سادگی یک خطای میانگین مربع است. پس از هر مرحله تقویت، الگوریتم وزنهای تازه اضافه شده را مقیاس میکند. در این مطالعه، یک کد منبع باز “xgboost” برای محیط R مورد استفاده قرار گرفت [ 76 ].
3.3.3. شبکه عصبی عمیق (DNN)
اخیراً DNN موضوع بیشتر پیشرفتهای هوش مصنوعی بوده است. DNN یک مدل چند لایه برای یادگیری روابط پیچیده غیرخطی بین داده های ورودی است. برای یک متغیر وابسته معین i و پارامترهای مدل شناخته شده θ ، توزیع پواسون متغیر پاسخ را می توان پیش بینی کرد، همانطور که در رابطه (12) ارائه شده است.
جایی که آنh , .متر( x , θ )آمترنساعت،.(ایکس،�)قسمت مشترک مدل را می سازد. در این مطالعه، تابع فعالسازی ReLU انتخاب شد زیرا مشکلات بهینهسازی تجربی کمتری را نشان میداد.
4. نتایج و تجزیه و تحلیل
4.1. انتخاب IF ها
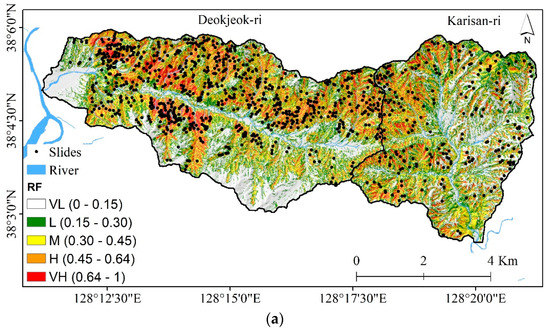
4.2. کاربرد RF در نقشه برداری حساسیت زمین لغزش
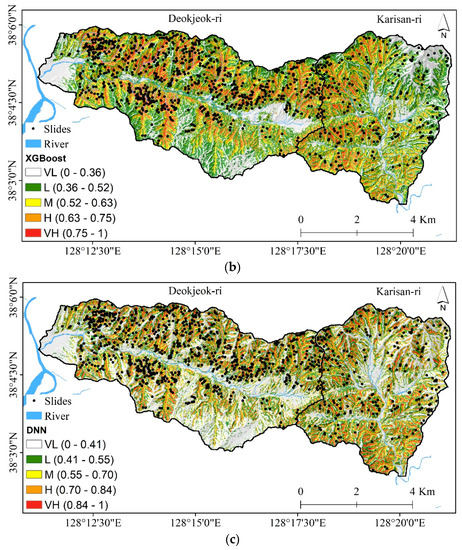
4.3. کاربرد XGBost در نقشه برداری حساسیت زمین لغزش
4.4. کاربرد DNN در نقشه برداری حساسیت زمین لغزش
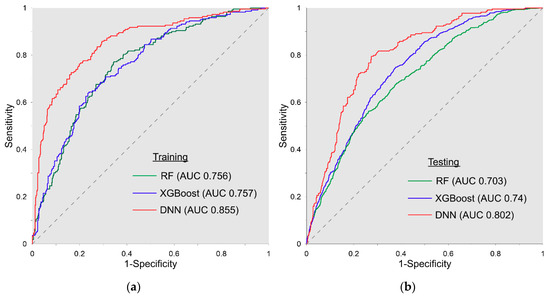
4.5. اقدامات ارزیابی
5. بحث
6. نتیجه گیری
منابع
- چانگ، Y.-S. یون، M.-B. کیم، اچ.-اس. در مورد تغییرات آب و هوایی و تغییرات مشاهده شده در کره جنوبی. صعود چانگ. 2004 ، 66 ، 151-161. [ Google Scholar ] [ CrossRef ]
- کیم، Y.-T. لی، جی.اس. ویژگی پایداری شیب خاک گرانیت فرسوده نشده در کره با در نظر گرفتن بارندگی قبلی. Geo Congr. 2013 2013 ، 349–401. [ Google Scholar ] [ CrossRef ]
- مایلز، اس بی؛ Keefer، DK ارزیابی مدلهای شیب-عملکرد لرزهای با استفاده از مطالعه موردی منطقهای. محیط زیست مهندس Geosci. 2000 ، 6 ، 25-39. [ Google Scholar ] [ CrossRef ]
- تارولی، پ. Tarboton, DG روشی جدید برای تعیین محتمل ترین نقاط شروع زمین لغزش و ارزیابی مقیاس مدل رقومی زمین در نقشه برداری پایداری زمین. هیدرول. سیستم زمین علمی 2006 ، 10 ، 663-667. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- Iida, T. روش هیدرولوژیکی تخمین اثر توپوگرافی بر جریان عبوری اشباع. Jpn. ژئومورف. اتحادیه ترانس. 1984 ، 5 ، 1-12. [ Google Scholar ]
- Keefer، DK بررسی زمین لغزش های ناشی از زلزله – مروری تاریخی. Surv. ژئوفیز. 2002 ، 23 ، 473-510. [ Google Scholar ] [ CrossRef ]
- مور، جی جی. کلگ، دی. Holcomb، RT; لیپمن، PW; نورمارک، WR؛ لغزش زمین زیردریایی Torresan، ME Prodigious در خط الرأس هاوایی. جی. ژئوفیس. Res. 1989 ، 94 ، 17465-17484. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- Brabb، EE رویکردهای نوآورانه برای نقشه برداری خطر زمین لغزش. در مجموعه مقالات چهارمین سمپوزیوم بین المللی زمین لغزش، تورنتو، ON، کانادا، 23 تا 31 اوت 1984; صص 307-324. [ Google Scholar ]
- فورلانی، س. نینفو، الف. آیا حال کلید آینده است؟ Earth-Sci. Rev. 2015 , 142 , 38-46. [ Google Scholar ] [ CrossRef ]
- کارارا، ا. کاردینالی، م. دتی، آر. گوزتی، اف. پاسکی، وی. تکنیکها و مدلهای آماری GIS در ارزیابی خطر زمینلغزش رایشنباخ، P. زمین گشت و گذار. روند. Landf. 1991 ، 16 ، 427-445. [ Google Scholar ] [ CrossRef ]
- Chung, C.-JF; Fabbri، AG اعتبارسنجی مدلهای پیشبینی فضایی برای نقشهبرداری خطر زمین لغزش. نات خطرات 2003 ، 30 ، 451-472. [ Google Scholar ] [ CrossRef ]
- کرومیناس، جی. ون وستن، سی. فراتینی، پ. کاسینی، ال. Malet، J.-P. فتوپولو، س. کاتانی، اف. ون دن ایکهات، ام. ماورولی، ا. آگلیاردی، اف. و همکاران توصیه هایی برای تحلیل کمی خطر زمین لغزش گاو نر مهندس جئول محیط زیست 2013 ، 73 ، 209-263. [ Google Scholar ] [ CrossRef ]
- رایشنباخ، پ. روسی، ام. Malamud، BD; میهیر، م. Guzzetti، F. مروری بر مدلهای حساسیت زمین لغزش مبتنی بر آمار. Earth-Sci. Rev. 2018 , 180 , 60-91. [ Google Scholar ] [ CrossRef ]
- دای، اف. لی، سی. ویژگی های زمین لغزش و مدل سازی ناپایداری شیب با استفاده از GIS، جزیره لانتائو، هنگ کنگ. ژئومورفولوژی 2002 ، 42 ، 213-228. [ Google Scholar ] [ CrossRef ]
- شرستا، س. کانگ، T.-S. Choi، JC ارزیابی حساسیت زمین لغزش همزمان لرزه ای با استفاده از LR و ANCOVA در منطقه بارپاک، نپال. J. Earth Syst. علمی 2018 ، 127 ، 38. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- آلئوتی، پی. Chowdhury، R. ارزیابی خطر زمین لغزش: بررسی خلاصه و دیدگاه های جدید. گاو نر مهندس جئول محیط زیست 1999 ، 58 ، 21-44. [ Google Scholar ] [ CrossRef ]
- کو کو، سی. فلنتجه، پ. Chowdhury، R. کمی خطر زمین لغزش و ارزیابی ریسک: مطالعه موردی. مهندس QJ جئول هیدروژئول. 2003 ، 36 ، 261-272. [ Google Scholar ] [ CrossRef ]
- پرادان، AMS؛ کیم، YT روش اثر نسبی پهنه بندی حساسیت زمین لغزش در خاک گرانیت هوازده: مطالعه موردی در Deokjeok-ri Creek، کره جنوبی. نات خطرات 2014 ، 72 ، 1189-1217. [ Google Scholar ] [ CrossRef ]
- پرادان، AMS؛ دوادی، ع. Kim, YT استفاده از روشهای مختلف آماری دو متغیره حساسیت زمین لغزش: مطالعه موردی حوضه آبخیز خلخانی، نپال. جیول نپال. Soc. 2012 ، 44 ، 1-12. [ Google Scholar ] [ CrossRef ]
- هونگ، اچ. لیو، جی. Bui، DT; پرادان، بی. آچاریا، تی دی. فام، بی تی؛ زو، A.-X. چن، دبلیو. Ahmad, B. Bin نگاشت حساسیت زمین لغزش با استفاده از J48 Decision Tree با AdaBoost، Bagging و Rotation Forest در منطقه Guangchang (چین). CATENA 2018 ، 163 ، 399–413. [ Google Scholar ] [ CrossRef ]
- پورقاسمی، ح. گاین، ا. پارک، اس. لی، سی.- دبلیو. لی، اس. پورقاسمی، HR; گاین، ا. پارک، اس. لی، سی.- دبلیو. لی، اس. ارزیابی نواحی مستعد زمین لغزش و پهنه بندی آنها با استفاده از رگرسیون لجستیک، LogitBoost و الگوریتم های یادگیری ماشینی ناییو بیس. Sustainability 2018 , 10 , 3697. [ Google Scholar ] [ CrossRef ][ Green Version ]
- تای فام، بی. پراکاش، آی. دو، جی. سینگ، SK; Trinh، PT; ترانگ تران، اچ. مین لی، تی. تران، معاون; کیم خوی، دی. شیرزادی، ع. و همکاران یک رویکرد ترکیبی جدید از مدلسازی حساسیت زمین لغزش با استفاده از مجموعه جنگل چرخشی و طبقهبندیکنندههای پایه مختلف. Geocarto Int. 2018 ، 14 ، 1-38. [ Google Scholar ] [ CrossRef ]
- فام، بی تی؛ نگوین، MD؛ Bui، K.-TT; پراکاش، آی. چاپی، ک. Bui, DT یک رویکرد جدید هوش مصنوعی مبتنی بر شبکه عصبی پرسپترون چند لایه و بهینهسازی مبتنی بر جغرافیای زیستی برای پیشبینی ضریب تحکیم خاک. CATENA 2019 ، 173 ، 302–311. [ Google Scholar ] [ CrossRef ]
- کورنژادی، ع. پورقاسمی، HR; افضلی، SF ارائه مدل جدید گروه RFFR برای ارزیابی حساسیت زمین لغزش در ایران ; Springer: Cham، سوئیس، 2019; صص 123-143. [ Google Scholar ]
- Nhu، VH; Hoang، ND; نگوین، اچ. Ngo، PTT; Thanh Bui، T. هوآ، PV; سامویی، پی. Tien Bui، D. ارزیابی اثربخشی یادگیری عمیق مبتنی بر Keras با الگوریتمهای بهینهسازی قوی مختلف برای نقشهبرداری حساسیت زمین لغزش کم عمق در مناطق گرمسیری. Catena 2020 , 188 , 104458. [ Google Scholar ] [ CrossRef ]
- نادبی، ا. برنینگ، آ. LeDrew, E. رویکردهای جدید برای مدلسازی روابط ماهی-زیستگاه. Ecol. مدل 2010 ، 221 ، 503-511. [ Google Scholar ] [ CrossRef ]
- فلاح، ف. قربانی نژاد، س. رحمتی، ا. دانشفر، م. کاربرد مدل افزایشی تعمیم یافته در مدلسازی پتانسیل آبهای زیرزمینی و مقایسه عملکرد آن با روشهای آماری دو متغیره. Geocarto Int. 2017 ، 32 ، 1069-1089. [ Google Scholar ] [ CrossRef ]
- عربامری، ع. یمانی، م. پرادان، بی. Melesse, A.; شیرانی، ک. تین بوئی، دی. مجموعههای جدیدی از تصمیمگیری چند معیاره COPRAS با رگرسیون لجستیک، درخت رگرسیون تقویتشده و جنگل تصادفی برای پیشبینی فضایی حساسیت فرسایش خندقی. علمی کل محیط. 2019 ، 688 ، 903-916. [ Google Scholar ] [ CrossRef ]
- دارابی، ح. چوبین، بی. رحمتی، ا. ترابی حقیقی، ع. پرادان، بی. Kløve، B. نقشهبرداری خطر سیل شهری با استفاده از مدلهای GARP و QUEST: مطالعه مقایسهای تکنیکهای یادگیری ماشین. جی هیدرول. 2019 ، 569 ، 142-154. [ Google Scholar ] [ CrossRef ]
- کاوزوغلو، تی. کولکسن، آی. شاهین، تکنیکهای یادگیری ماشین EK در نقشهبرداری حساسیت زمین لغزش: یک بررسی و یک مطالعه موردی . Springer: Cham، سوئیس، 2019; صص 283-301. [ Google Scholar ]
- نگوین، وی. فام، بی. وو، بی. پراکاش، آی. جها، س. شهابی، ح. شیرزادی، ع. با، د. کومار، آر. چترجی، جی. و همکاران رویکردهای یادگیری ماشین ترکیبی برای مدلسازی حساسیت زمین لغزش. جنگلها 2019 ، 10 ، 157. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- سمین، MI; پرادان، بی. Bui، DT; Alamri، AM استراتژی تقسیم نمونه سیستماتیک برای آموزش مدل های حساسیت به زمین لغزش. Catena 2020 , 187 , 104358. [ Google Scholar ] [ CrossRef ]
- Pašek, J. فهرست زمین لغزش. گاو نر بین المللی دانشیار مهندس جئول 1975 ، 12 ، 73-74. [ Google Scholar ] [ CrossRef ]
- قوش، ت. بوومیک، اس. جیسوال، پی. قوش، س. کومار، دی. تولید فهرست کامل زمین لغزش با استفاده از منابع داده چندگانه: مطالعه موردی در شمال غربی هیمالیا، هند. جی. جئول. Soc. هند 2020 ، 95 ، 45-58. [ Google Scholar ] [ CrossRef ]
- گوزتی، اف. پروکاچی، اس. روسی، ام. Stark، CP کنترل شدت بارندگی – مدت زمان لغزش های کم عمق و جریان های زباله: به روز رسانی. زمین لغزش 2008 ، 5 ، 3-17. [ Google Scholar ] [ CrossRef ]
- دو، ج. گلید، تی. ولدای، تی. چای، بی. Zeng، B. ارزیابی حساسیت زمین لغزش بر اساس موجودی ناقص زمین لغزش در دره جیلونگ، تبت، هیمالیاهای چینی. مهندس جئول 2020 , 270 , 105572. [ Google Scholar ] [ CrossRef ]
- طوفانی، وی. دل ونتیست، سی. مورتی، اس. کاساگلی، ن. طوفانی، وی. دل ونتیست، سی. مورتی، اس. Casagli، N. ادغام تکنیک های سنجش از دور برای منطقه بندی شدت در یک منطقه لغزش: مطالعه موردی در آپنین شمالی، ایتالیا. Remote Sens. 2014 , 6 , 907–924. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- گوریرو، ال. کنفورتو، پی. کالکاترا، دی. Guadagno، FM; رولینو، پی. دی مارتیره، دی. فهرستی از زمین لغزشهای مخرب شهر در استانهای بنونتو، آولینو و سالرنو، جنوب ایتالیا، بر اساس PS. J. Maps 2019 , 15 , 619–625. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- رزی، ا. طوفانی، وی. تانتری، ال. تاکونی استفانلی، سی. آگوستینی، ا. کاتانی، اف. Casagli، N. فهرست جدید زمین لغزش توسکانی (ایتالیا) به روز شده با PS-InSAR: ویژگی های ژئومورفولوژیکی و توزیع زمین لغزش. رانش زمین 2018 ، 15 ، 5-19. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- فیلیپس، اس جی. Dudík، M. مدل سازی توزیع گونه ها با Maxent: الحاقات جدید و ارزیابی جامع. اکوگرافی 2008 ، 31 ، 161-175. [ Google Scholar ] [ CrossRef ]
- پرادان، AMS؛ کیم، YT ارزیابی یک مدل ارزیابی چند معیاره فضایی ترکیبی و مدل قطعی برای نقشهبرداری حساسیت زمین لغزش. Catena 2016 ، 140 ، 125-139. [ Google Scholar ] [ CrossRef ]
- پرادان، AMS؛ لی، اس.-ر. کیم، Y.-T. یک مدل پیشبینی لغزش کم عمق با ترکیب هشدارهای آستانه بارندگی و حساسیت لغزش کم عمق در بوسان، کره. رانش زمین 2019 ، 16 ، 647-659. [ Google Scholar ] [ CrossRef ]
- چن، دبلیو. پورقاسمی، HR; Zhao، Z. یک مطالعه تطبیقی مبتنی بر GIS مدلهای Dempster-Shafer، رگرسیون لجستیک و شبکههای عصبی مصنوعی برای نقشهبرداری حساسیت زمین لغزش. Geocarto Int. 2017 ، 32 ، 367-385. [ Google Scholar ] [ CrossRef ]
- گلید، تی. کروزیر، ام. اسمیت، پی. استفاده از تعیین احتمال برای اصلاح آستانه های بارندگی محرک زمین لغزش با استفاده از “مدل بارش روزانه پیشین” تجربی. Pure Appl. ژئوفیز. 2000 ، 157 ، 1059-1079. [ Google Scholar ] [ CrossRef ]
- کروزیر، ام جی. گلید، تی. مروری بر وابستگی مقیاس در خطر زمین لغزش و تجزیه و تحلیل ریسک. در خطر زمین لغزش و خطر ; کتابخانه آنلاین وایلی: هوبوکن، نیوجرسی، ایالات متحده آمریکا، 2012; ISBN 9780471486633. [ Google Scholar ]
- ارکان اوغلو، م. Gokceoglu، C. استفاده از روابط فازی برای تهیه نقشه حساسیت زمین لغزش یک منطقه مستعد زمین لغزش (منطقه دریای سیاه غرب، ترکیه). مهندس جئول 2004 ، 75 ، 229-250. [ Google Scholar ] [ CrossRef ]
- دای، اف سی؛ لی، سی اف; لی، جی. Xu، ZW ارزیابی حساسیت زمین لغزش در زمین طبیعی جزیره لانتائو، هنگ کنگ. محیط زیست جئول 2001 ، 40 ، 381-391. [ Google Scholar ] [ CrossRef ]
- Doornkamp, JC; Cooke, RU ژئومورفولوژی در مدیریت محیطی: مقدمه ; Clarendon Press: آکسفورد، انگلستان، 1974. [ Google Scholar ]
- پرادان، AMS؛ لی، جی.اس. کیم، Y.-T. تأثیر مدل توزیع عمق فضایی خاک بر پیشبینی زمین لغزش کم عمق: مطالعه موردی از کوه کره EGUA 2018 ، 20 ، 17502. [ Google Scholar ]
- ارنر، ا. Düzgün، HSB ارزیابی حساسیت زمین لغزش: اثرات واحد نقشه برداری و روش نقشه برداری چیست؟ محیط زیست علوم زمین 2012 ، 66 ، 859-877. [ Google Scholar ] [ CrossRef ]
- پاچائوری، AK; Pant, M. نقشه برداری خطر زمین لغزش بر اساس ویژگی های زمین شناسی. مهندس جئول 1992 ، 32 ، 81-100. [ Google Scholar ] [ CrossRef ]
- مور، شناسه; گریسون، RB; Ladson، مدلسازی زمین دیجیتال AR: مروری بر کاربردهای هیدرولوژیکی، ژئومورفولوژیکی و بیولوژیکی. هیدرول. روند. 1991 ، 5 ، 3-30. [ Google Scholar ] [ CrossRef ]
- مور، شناسه; Burch، GJ مبنای فیزیکی فاکتور طول-شیب در معادله جهانی تلفات خاک 1. علم خاک Soc. صبح. J. 1986 , 50 , 1294. [ Google Scholar ] [ CrossRef ]
- او، س. شهابی، ح. شیرزادی، ع. لی، اس. چن، دبلیو. وانگ، ن. چای، اچ. بیان، اچ. ما، جی. چن، ی. و همکاران مدلسازی فضایی لغزش با استفاده از الگوریتمهای یادگیری ماشینی مبتنی بر آماری دو متغیره جدید، طبقهبندیکننده RBF، و الگوریتمهای یادگیری ماشین شبکه RBF. علمی کل محیط. 2019 ، 663 ، 1-15. [ Google Scholar ] [ CrossRef ]
- Beven، KJ; Kirkby، MJ یک مدل مبتنی بر فیزیکی، متغیر منطقه کمک کننده هیدرولوژی حوضه. هیدرول. علمی گاو نر 1979 ، 24 ، 43-69. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- ریکلی، سی. زورچر، ک. فری، دبلیو. Lüscher, P. Wirkungen des Waldes auf oberflächennahe Rutschprozesse|اثرات جنگل بر رانش زمین. شویز. Z. Forstwes. 2002 ، 153 ، 437-445. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- کیتوتو، ام جی؛ مووانگا، ا. پوسن، جی. Deckers، JA تأثیر خواص خاک بر وقوع زمین لغزش در منطقه بودودا، اوگاندا شرقی. افر. جی. آگریک. Res. 2009 ، 4 ، 611-620. [ Google Scholar ]
- Sidle، RC; پیرس، ای جی؛ O’Loughlin، CL; اتحادیه ژئوفیزیک آمریکا پایداری دامنه و کاربری زمین ; اتحادیه ژئوفیزیک آمریکا: واشنگتن دی سی، ایالات متحده آمریکا، 1985; ISBN 0875903150. [ Google Scholar ]
- Yalcin، A. اثرات خاک رس بر زمین لغزش: مطالعه موردی. Appl. Clay Sci. 2007 ، 38 ، 77-85. [ Google Scholar ] [ CrossRef ]
- Duna، CR; دارسی، ام. مک دونالد، جی. کنترلهای سنگشناسی ویتاکر، کالیفرنیا بر روی عرضه رسوب در دامنه تپه: بینشهایی از فعالیت زمین لغزش و توزیع اندازه دانه. زمین گشت و گذار. روند. Landf. 2018 ، 43 ، 956-977. [ Google Scholar ]
- کاوزوغلو، تی. شاهین، EK; Colkesen، I. نگاشت حساسیت زمین لغزش با استفاده از تجزیه و تحلیل تصمیم گیری چند معیاره مبتنی بر GIS، ماشین های بردار پشتیبان و رگرسیون لجستیک. زمین لغزش 2014 ، 11 ، 425-439. [ Google Scholar ] [ CrossRef ]
- پرادان، AMS؛ کانگ، اچ اس. لی، جی اس. Kim, YT یک مجموعه مدل خطر لغزش زمین که دارای آستانه بارندگی برای کوه Umyeon، کره جنوبی است. گاو نر مهندس جئول محیط زیست 2019 ، 78 ، 131-146. [ Google Scholar ] [ CrossRef ]
- O’Brien، RM احتیاط در مورد قوانین سرانگشتی برای عوامل تورم واریانس. کیفیت مقدار. 2007 ، 41 ، 673-690. [ Google Scholar ] [ CrossRef ]
- منارد، اس. تحلیل رگرسیون لجستیک کاربردی ; SAGE: Thousand Oaks، CA، USA، 1995. [ Google Scholar ]
- اسلینکر، BK; Glantz، SA رگرسیون چندگانه برای تجزیه و تحلیل داده های فیزیولوژیکی: مشکل چند خطی. صبح. جی. فیزیول. 1985 ، 249 ، R1-R12. [ Google Scholar ] [ CrossRef ]
- اسلینکر، BK; Glantz، SA رگرسیون خطی چندگانه: حسابداری چند عامل تعیین کننده همزمان یک متغیر وابسته پیوسته. تیراژ 2008 ، 117 ، 1732-1737. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- بلزلی، دی. کوه، ای. ولش، آر. تشخیص و ارزیابی هم خطی. در تشخیص رگرسیون: شناسایی داده های تأثیرگذار و منابع هم خطی . Wiley: New Yor، NY، USA، 1980; صص 85-91. ISBN 9780471725152. [ Google Scholar ]
- سویتس، جی. پیکت، آر. وایتهد، اس. گتی، دی. شنور، جی. سویتس، جی. فریمن، ب. ارزیابی فناوری های تشخیصی. Science 1979 ، 205 ، 753-759. [ Google Scholar ] [ CrossRef ]
- هانلی، جی. McNeil, BJ معنی و استفاده از ناحیه زیر یک منحنی مشخصه عملکرد گیرنده (ROC). رادیولوژی 1982 ، 143 ، 29-36. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- Hosmer، DW; Lemeshow, S. Applied Logistic Regression , 2nd ed.; Wiley-Blackwell: Hoboken، NJ، USA، 2000. [ Google Scholar ]
- بالدی، پ. بروناک، س. شووین، ی. اندرسن، CAF; نیلسن، اچ. ارزیابی دقت الگوریتمهای پیشبینی برای طبقهبندی: یک مرور کلی. بیوانفورماتیک 2000 ، 16 ، 421-424. [ Google Scholar ] [ CrossRef ] [ PubMed ][ نسخه سبز ]
- بریمن، ال. جنگل های تصادفی. ماخ فرا گرفتن. 2001 ، 45 ، 5-32. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- کاتانی، اف. لاگومارسینو، دی. سگونی، س. توفانی، وی. برآورد حساسیت زمین لغزش با تکنیک جنگلهای تصادفی: مسائل مربوط به حساسیت و مقیاسپذیری. نات سیستم خطرات زمین. علمی 2013 ، 13 ، 2815-2831. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- فریمن، ای. فرسینو، تی. Moisen, G. ModelMap: یک بسته R برای مدلسازی و تولید نقشه با استفاده از جنگل تصادفی و افزایش گرادیان تصادفی . خدمات جنگلی USDA/ایستگاه تحقیقاتی راکی کوهستان: اوگدن، یوتا، 2009; پ. 507. [ Google Scholar ]
- چن، تی. Guestrin, C. XGBoost, مجموعه مقالات بیست و دومین کنفرانس بین المللی ACM SIGKDD در مورد کشف دانش و داده کاوی—KDD ’16 ; ACM Press: نیویورک، نیویورک، ایالات متحده آمریکا، 2016. صص 785-794. [ Google Scholar ]
- چن، تی. او، تی. Benesty، M. Xgboost: Extreme Gradient Boosting ; بسته R نسخه 0.3-1; گزارش فنی؛ 2015; صص 1-4. در دسترس آنلاین: https://cran.fhcrc.org/web/packages/xgboost/vignettes/xgboost.pdf (در 4 سپتامبر 2020 قابل دسترسی است).
- بنژیو، ی. لی، دی.-اچ. بورنشاین، جی. مسنارد، تی. Lin, Z. به سوی یادگیری عمیق بیولوژیکی قابل قبول. arXiv 2015 ، arXiv:1502.04156. [ Google Scholar ]
- سنگ مرمر، ق. وین، جی. کوردینگ، KP به سوی ادغام یادگیری عمیق و علوم اعصاب. جلو. محاسبه کنید. نوروسک. 2016 ، 10 ، 94. [ Google Scholar ] [ CrossRef ]
- لدل، ای. گیل، ن. آیلو، اس. فو، ا. کندل، ا. کلیک کنید، C. کرالیویچ، تی. نیکودیم، تی. ابویون، پ. کورکا، م. و همکاران H2O: رابط R برای ‘H2O’ . پکیج R نسخه 3.20.0.2; 2018; در دسترس آنلاین: https://CRAN.R-project.org/package=h2o (در 4 سپتامبر 2020 قابل دسترسی است).
- ساندینو، جی. پگ، جی. گونزالس، اف. اسمیت، جی. ساندینو، جی. پگ، جی. گونزالس، اف. اسمیت، جی. نقشه برداری هوایی از جنگل های تحت تأثیر عوامل بیماری زا با استفاده از پهپاد، حسگرهای فراطیفی و هوش مصنوعی. Sensors 2018 , 18 , 944. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- کلیمش، جی. تجزیه و تحلیل زمانی زمین لغزش و ارزیابی حساسیت به عنوان پایه ای برای کاهش زمین لغزش، ماچو پیچو، پرو. محیط زیست علوم زمین 2013 ، 70 ، 913-925. [ Google Scholar ] [ CrossRef ]
- شرستا، س. کانگ، T.-S. Suwal, M. یک مدل مجموعه ای برای حساسیت زمین لغزش همزمان لرزه ای با استفاده از GIS و روش جنگل تصادفی. ISPRS Int. J. Geo-Inf. 2017 ، 6 ، 365. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- فام، بی تی؛ پراکاش، آی. سینگ، SK; شیرزادی، ع. شهابی، ح. Tran، T.-T.-T.; مدلسازی حساسیت زمین لغزش Bui، DT با استفاده از درختان هرس با خطای کاهشیافته و تکنیکهای مختلف مجموعه: رویکردهای یادگیری ماشین ترکیبی. CATENA 2019 ، 175 ، 203–218. [ Google Scholar ] [ CrossRef ]
- نوبر، AD; کوارتاس، لس آنجلس؛ هادنت، ام. رنو، سی دی; رودریگز، جی. سیلویرا، ا. واترلو، ام. Saleska، S. ارتفاع بالاتر از نزدیکترین زهکشی – یک مدل زمین جدید مرتبط با هیدرولوژیک. جی هیدرول. 2011 ، 404 ، 13-29. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- گوکچه اوغلو، سی. آکسوی، H. نقشهبرداری حساسیت زمین لغزش دامنهها در خاکهای باقیمانده منطقه منگن (ترکیه) با تجزیه و تحلیل پایداری قطعی و تکنیکهای پردازش تصویر. مهندس جئول 1996 ، 44 ، 147-161. [ Google Scholar ] [ CrossRef ]
- کانورتینو، ام. تروکولی، ا. Catani، F. تشخیص اثر انگشت درایورهای زمین لغزش: یک مدل MaxEnt. جی. ژئوفیس. Res. زمین گشت و گذار. 2013 ، 118 ، 1367–1386. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- لاگومارسینو، دی. طوفانی، وی. سگونی، س. کاتانی، اف. Casagli، N. ابزاری برای طبقه بندی و رگرسیون با استفاده از روش جنگل تصادفی: کاربردها برای نقشه برداری حساسیت زمین لغزش و مدل سازی ضخامت خاک. محیط زیست مدل. ارزیابی کنید. 2017 ، 22 ، 201-214. [ Google Scholar ] [ CrossRef ]
- خو، سی. دای، اف. خو، X. مدلسازی ماشین بردار پشتیبانی مبتنی بر YH GIS از حساسیت زمین لغزش ناشی از زلزله در حوضه رودخانه جیانجیانگ، چین. ژئومورفولوژی 2012 ، 145-146 ، 70-80. [ Google Scholar ] [ CrossRef ]
- کیم، جی سی؛ لی، اس. یونگ، اچ اس. لی، اس. نقشهبرداری حساسیت زمین لغزش با استفاده از مدلهای جنگل تصادفی و درخت تقویتشده در پیونگ چانگ، کره. Geocarto Int. 2018 ، 33 ، 1000-1015. [ Google Scholar ] [ CrossRef ]
- لومباردو، ال. کاما، م. کونوسنتی، سی. مرکر، ام. Rotigliano، E. رگرسیون لجستیک باینری در مقابل درختان تصمیم افزایش یافته گرادیان تصادفی در ارزیابی حساسیت زمین لغزش برای رویدادهای زمین لغزش چندگانه: کاربرد برای رویداد طوفان 2009 در مسینا (سیسیل، جنوب ایتالیا). نات خطرات 2015 ، 79 ، 1621-1648. [ Google Scholar ] [ CrossRef ]
- آهنگ، ی. نیو، ر. خو، اس. بله، آر. پنگ، ال. گوا، تی. لی، اس. چن، تی. نقشهبرداری حساسیت زمین لغزش بر اساس درخت تصمیمگیری افزایش گرادیان وزنی در بخش Wanzhou از منطقه مخزن سه دره (چین). ISPRS Int. J. Geo-Inf. 2019 ، 8 ، 4. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- قربانزاده، ا. بلاشکه، تی. غلام نیا، ک. مینا، اس آر. تاید، دی. Aryal, J. ارزیابی روشهای مختلف یادگیری ماشین و شبکههای عصبی کانولوشنال یادگیری عمیق برای تشخیص زمین لغزش. Remote Sens. 2019 , 11 , 196. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- شیائو، ال. ژانگ، ی. پنگ، جی. ارزیابی حساسیت زمین لغزش با استفاده از الگوریتم یادگیری عمیق یکپارچه در امتداد بزرگراه چین-نپال. Sensors (Switzerland) 2018 , 18 , 4436. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- وانگ، اف. خو، پی. وانگ، سی. وانگ، ن. جیانگ، ن. کاربرد یک روش واحد شیب مبتنی بر GIS برای نقشهبرداری حساسیت زمین لغزش در امتداد رودخانه لونگزی، فلات جنوب شرقی تبت، چین. ISPRS Int. J. Geo-Inf. 2017 ، 6 ، 172. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- دو، جی. یونس، AP; مرغدی، ع. شیرزادی، ع. نگوین، اچ. حسین، ی. آوتار، ر. چن، ی. فام، بی تی؛ یاماگیشی، اچ. استراتژیهای نمونهگیری مختلف برای پیشبینی حساسیت زمین لغزش با یادگیری عمیق کمتر نتیجه میدهند. علمی کل محیط. 2020 , 720 , 137320. [ Google Scholar ] [ CrossRef ] [ PubMed ]
- کریژفسکی، آ. سوتسکور، آی. هینتون، GE ImageNet طبقه بندی با شبکه های عصبی کانولوشن عمیق. ACM ارتباطی. 2017 ، 60 ، 84-90. [ Google Scholar ] [ CrossRef ]
- سیرگان، دی. مایر، یو. Schmidhuber, J. شبکه های عصبی عمیق چند ستونی برای طبقه بندی تصویر. در مجموعه مقالات کنفرانس انجمن کامپیوتر IEEE در مورد دید رایانه و تشخیص الگو، پراویدنس، RI، ایالات متحده آمریکا، 16 تا 21 ژوئن 2012. [ Google Scholar ]



بدون دیدگاه