1. معرفی
یکی از نگرانیهای مهم ایمنی برای مسافران عمومی، پایداری شیب در امتداد جادهها است. به ویژه، در مناطق کوهستانی با شیب های تند، رانش زمین تهدیدات بالقوه ای برای امنیت عمومی است. تشخیص زودهنگام جابجایی زمین قریبالوقوع ممکن است بینشهای ارزشمندی برای ارزیابی خطرات شیب فراهم کند و منجر به بهبود ایمنی در طول یک راهرو حملونقل شود.
روش مرسوم تشخیص حرکت شیب با حسگرهای نقطهای (به عنوان مثال، شیبسنج یا گیرندههای GPS) در مکانهای از پیش شناساییشده که از نظر زمینشناسی آسیبپذیر در نظر گرفته میشوند، انجام میشود. این اندازهگیریها دقیق هستند، اما به سختی در کل منطقه مورد نظر (AoI) کافی هستند.
یک جایگزین محبوب استفاده از رادار دیافراگم مصنوعی تداخل سنجی (InSAR) و InSAR چند زمانی (MTInSAR) [ 1 ] است. این فناوری به دلیل قابلیتهای نظارتی با دقت بالا و همیشگی و همچنین نسبت هزینه به فایده خوب خود متمایز است. در اوایل سال 2006، وزارت حمل و نقل ایالات متحده (DOT) گزارش داده است که از InSAR برای نظارت بر شیب ها در امتداد بزرگراه های بین ایالتی استفاده می کند [ 2 ]. در دهه اخیر، پیشرفت هایی هم در سطح سخت افزار و هم در سطح الگوریتم وجود داشته است [ 1 ]. با در دسترس بودن ماهواره های SAR با وضوح بالا مانند TerraSAR-X (TSX) و COSMO-SkyMed (COSMO)، از نظر تئوری امکان چرخش هر پیکسل 2 متری در داخل یک 1000 کیلومتر2منطقه (پوشش تقریبی حالت نقشه نواری TSX یا CSK) در اندازه گیری GPS با دقت میلی متر [ 3 ، 4 ]. این امر فرصت های جدیدی را در پروژه های نظارت بر زمین باز می کند.
تعداد برنامه های نظارت زمینی با InSAR در دهه گذشته به طور بی سابقه ای افزایش یافته است. صرفاً با نگاهی به مقالات منتشر شده، InSAR و MTInSAR در زمینه های مختلفی مشارکت داشته اند [ 5]: زمین شناسی، ژئوفیزیک، نفت و گاز، معدن و از همه مهمتر مهندسی عمران. در میان برنامه های مهندسی عمران، موضوعات پوشش داده شده اما نه محدود به ساختمان ها، راه آهن، خطوط لوله، تونل ها و فروچاله ها. یکی از عواملی که به موفقیت این حوزه کمک می کند، پیشرفت های ماهواره های SAR و انباشته شدن تصاویر آرشیو شده است. ده سال پیش، زمانی که تنها تعداد انگشت شماری از ماهواره های SAR در فضا وجود داشت، یک پروژه مهندسی عمران مانند نظارت بر شیب ممکن بود تنها با داده های با وضوح پایین (هم مکانی و هم زمانی) به مرحله اثبات مفهوم برسد. امروزه، با استفاده از ماهواره های عملیاتی بیشتر، می توان تقریباً در هر نقطه از زمین با گزینه های زیادی نظارت کرد.
به طور طبیعی، زمانی که انتخاب های بیشتری در دسترس باشد، یک سوال مهم مطرح می شود: بهترین ماهواره و بهترین پیکربندی برای یک پروژه خاص چه باید باشد؟ برای بسط چند سؤال فنی، میتوانیم داشته باشیم:
-
مناسب ترین طول موج، باند C، X یا L چیست؟
-
بهترین زاویه تابش چیست؟
-
فرکانس مناسب بازدید مجدد چیست؟
-
صعودی یا نزولی؟
-
چه قطعنامه ای را می توان پذیرفت؟
-
کدام حالت اکتساب بهتر است، یعنی نقشه نواری یا نورافکن؟
-
چه رویکردی باید برای پردازش استفاده شود، به عنوان مثال، InSAR دیفرانسیل (DInSAR) [ 6 ]، MTInSAR [ 7 ]، زیر مجموعه خط پایه کوچک (SBaS) [ 8 ]، یا موارد دیگر [ 5 ]؟
در یک حالت ایده آل، مطلوب است که تمام تنظیمات موجود را داشته باشیم (علاوه بر این، تجزیه می تواند برای تعیین حرکت عمودی و افقی [ 9 ] با داشتن مسیر صعودی و نزولی انجام شود). با این حال، برای یک پروژه مهندسی واقعی که با بودجه همراه است، این سوال که چگونه بهترین پیکربندی(های) را انتخاب کنیم مهم می شود.
در دهه گذشته، DOTهای ایالات متحده تعدادی از پروژه های نظارتی InSAR را آغاز کردند، برای نام بردن از آنها، به [ 10 ، 11 ، 12 ، 13 ، 14 ] مراجعه کنید. آگاهی از استفاده از InSAR همراه با سایر تکنیک های مرسوم نقشه برداری برای صنعت مهندسی عمران و حمل و نقل از آن زمان در حال افزایش است. در اوایل سال 2006، DOT ایالات متحده راهنمایی برای استفاده تجاری از داده های InSAR در پایش پایداری شیب بزرگراه ارائه کرد [ 2 ]. بخش ارزشمند [ 2 ] تمرکز آن بر ملاحظات عملی در استفاده از داده های InSAR به جای تأکید بر مزایای نظری آن است. ایده های [ 2] همچنین با در نظر گرفتن ماهواره هایی که پس از سال 2006 پرتاب شدند، منجر به بخشی از این نسخه می شود. تعداد بسیار کمی روی مرحله قبل از همه اینها تمرکز کردند: تلاش در انتخاب مناسب ترین ماهواره و پیکربندی بهینه. برای برخی از پروژهها، دلیل انتخاب معمولاً ساده بود: استفاده از یک یا همه دادههای موجود (در بیشتر موارد این فقط به معنی آنهایی بود که رایگان هستند، یعنی Sentinel-1). با این حال، برای یک پروژه نظارت زنده که در آن می توان از بین تمام ماهواره های تجاری موجود با بودجه معین انتخاب کرد، “خرید” اهمیت ویژه ای پیدا می کند.
بنابراین، برای بخش بزرگی از این مطالعه، این سوال باز زیر به طور کامل مورد بحث قرار می گیرد: برای نظارت بر شیب های بزرگراه، پیکربندی ماهواره ای بهینه چیست؟
تا آنجا که به فناوری InSAR مربوط می شود، سؤالات زیر مطرح می شود:
-
پیکربندی که بهترین وضوح را برای AoI (هم مکانی و هم زمانی) می دهد چیست؟
-
پیکربندی که بهترین حساسیت اندازه گیری را به خط دید ماهواره ای (LoS) می دهد چیست؟
-
پیکربندی که بهترین نسبت سیگنال به نویز (SNR) را برای AoI می دهد چیست؟
در این مطالعه، این سوالات با توجه به یک پروژه نظارتی که شامل بخشی از بزرگراه بین ایالتی ایالات متحده I-77 و شیب های مجاور است، پاسخ داده می شود. این پروژه به دو بخش تقسیم شد:
این مقاله در شش بخش تقسیم شده است. بخش 2 گردش کار کل پروژه را مورد بحث قرار می دهد. بخش 4 روش های کلیدی را بررسی می کند. بخش 4 منطقه مورد علاقه و مجموعه داده های موجود را نشان می دهد. بخش 5 و بخش 6 نتیجه و برخی تفسیرها را نشان می دهد. بخش 7 و بخش 8 بحث و نتیجه گیری را بیان می کند.
2. گردش کار
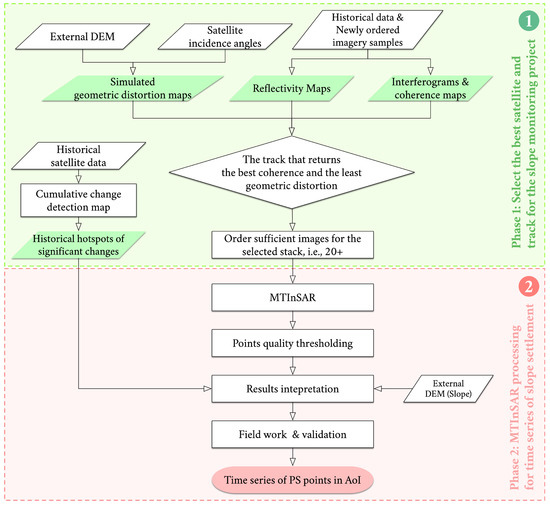
همانطور که در شکل 1 نشان داده شده است ، دو مرحله برای این مطالعه وجود دارد. فاز 1 ارزیابی بهترین پیکربندی ماهواره بر اساس گزینه های موجود است. فاز 2 پردازش MTInSAR است.
2.1. فاز 1: مناسب ترین ماهواره و پیکربندی را ارزیابی کنید
فاز یک بهترین پیکربندی را برای طرح نظارت بلندمدت در فاز 2 انتخاب میکند. مراحل به شرح زیر است:
-
نقشه اعوجاج هندسی شبیه سازی شده را از مدل ارتفاع دیجیتال خارجی (DEM)، وضوح ماهواره و زاویه فرود ایجاد کنید.
-
نقشه تشخیص تغییر تجمعی را از روی دادههای تاریخی محاسبه کنید و فهرستی از نقاط حساس تاریخی را که به توجه ویژه برای پردازش MTInSAR نیاز دارند، برچسب بزنید.
-
(در صورت وجود بودجه) چند تصویر از مسیرهای ماهواره ای نامزد سفارش دهید و نقشه های بازتابی، تداخل نگاشتها و نقشه های انسجام را پردازش کنید. نقشه اعوجاج هندسی شبیه سازی شده را بررسی کنید تا بفهمید آیا نتایج با نقشه اعوجاج هندسی شبیه سازی شده مطابقت دارند یا خیر.
-
ماهواره را انتخاب کنید و ردیابی کنید که: (الف) دارای وضوح فضایی مناسب برای هدف نظارت باشد. و (ب) بهترین انسجام را در AoI و در دامنه های منافع (SoI) دارد.
2.2. فاز 2: تجزیه و تحلیل چند زمانی با پیکربندی انتخابی ماهواره
فاز 2 فرآیند MTInSAR است. مراحل به شرح زیر است:
-
AoI را به مناطق کوچکتر تقسیم کنید. هر منطقه کوچک حداکثر 1 تا 2 کیلومتر است. پردازش MTInSAR را انجام دهید ( بخش 3.4 ).
-
یک آستانه کیفیت مناسب را بر اساس انسجام زمانی نقاط تعیین کنید ( بخش 3.4.3 ).
-
سری زمانی نقاط خروجی را بررسی کنید. نشانههای تغییر شکل قوی به دقت مورد مطالعه قرار میگیرند، از جمله کار میدانی به عنوان بخشی از اعتبارسنجی.
-
نتیجه را به عنوان نقشه تغییر شکل (در این مثال به وزارت حمل و نقل ویرجینیا) تحویل دهید.
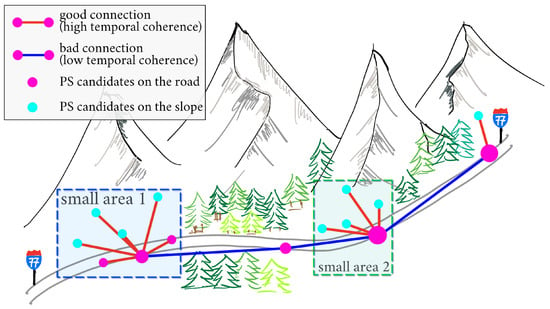
دلیل تقسیم AoI به مناطق کوچکتر به شرح زیر است. در پردازش مرسوم MTInSAR [ 7 ]، ساخت و وارونگی شبکه در کل منطقه مورد نظر انجام می شود. یکی از نکات کلیدی کیفیت اتصال به شبکه است. به عنوان مثال، اگر دو خوشه کوچکتر از نقاط در کل شبکه بد به هم متصل شده باشند (از نظر انسجام زمانی)، احتمالاً وارونگی شبکه بد شده و خطا را منتشر می کند ( شکل 2).). برای موفقیت آمیز بودن وارونگی، رئوس باید به طور متراکم و یکنواخت در فضا توزیع شوند تا از کیفیت قوس و افزونگی وارونگی شبکه اطمینان حاصل شود. با این حال، در این پروژه، اکثریت AoI به شدت پوشش گیاهی دارد. با توجه به ماهیت پراکندههای پایدار (PS)، بدست آوردن نقاط PS فقط در سطح بزرگراه و در شیبهای صخرههای بایر امکانپذیر است. به عبارت دیگر، به دلیل عدم وجود نقاط و توزیع ناهموار، اتصال بین شیب ها کمتر از حد مطلوب خواهد بود. بنابراین، وارونگی شبکه به احتمال زیاد ناموفق است. راه حل انجام موارد زیر خواهد بود. برای هر شیب جداگانه، تعداد زیادی کاندید PS را می توان با اتصال نسبتاً خوب به نقطه مرجع نزدیک واقع در بزرگراه پیدا کرد. ما قبلاً از وزارت حمل و نقل ویرجینیا (VDOT) می دانستیم که بزرگراه نسبتاً پایدار است و شیب ها خطرات بالقوه ای هستند که باید مراقب آنها بود. بنابراین، یک رویکرد عملی، تقسیم کل AoI 8 مایلی به مناطق کوچکتر است. برای هر ناحیه فرآیند MTInSAR به طور مستقل انجام می شود و نقطه با کمترین پراکندگی دامنه [7 ] در بزرگراه به عنوان نقطه مرجع برای آن منطقه کوچک استفاده می شود. شکل 2 این رویکرد را نشان می دهد.
3. روش شناسی
این بخش به مفاهیم و روش های مهم مورد استفاده در این پروژه می پردازد. اکثر آنها قبلاً به خوبی در تحقیقات قبلی تعریف شده اند، بنابراین این فصل بر چگونگی کمک این روش ها به این پروژه خاص تمرکز می کند.
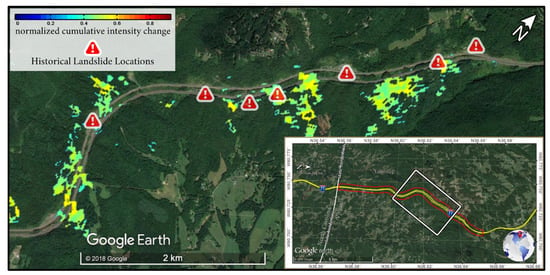
3.1. نقشه تشخیص تغییر تجمعی
دامنه تصاویر SAR شدت سیگنال دریافتی از جسم زمین را نشان می دهد. دامنه به عوامل بسیاری از جسم بستگی دارد، از جمله مواد، شکل، شیب، ناهمواری و غیره. زمین لغزش و ریزش سنگ معمولاً انواع رویدادهایی هستند که تا حد زیادی ویژگی های سطح را تغییر می دهند و در نتیجه دامنه تصاویر SAR را تغییر می دهند. نقشه تشخیص تغییر تجمعی نمای کلی از مکانهای دارای تغییرات قابل توجه در تصاویر SAR تاریخی را ارائه میدهد. این مکان ها پس از آن نیازمند توجه ویژه به پروژه نظارتی در حال انجام هستند.
برای انجام یک بررسی سریع، از یک روش بسیار ساده استفاده می شود. برای پشته ای از تصاویر SAR مشترک ثبت شده و عادی که در زمان مرتب شده اند، نقشه تشخیص تغییر تجمعی به صورت زیر تعریف می شود:
جایی که آمندامنه تصویر i است، پایانتغییرات تجمعی را عادی می کند [0،1]. مکان با ارزش بزرگتر نشان دهنده تغییرات قابل توجه بیشتر در گذشته است.
3.2. اعوجاج هندسی و پیامدهای آن بر InSAR
3.2.1. چرا اعوجاج هندسی برای نظارت بر شیب های بزرگراه مهم است؟
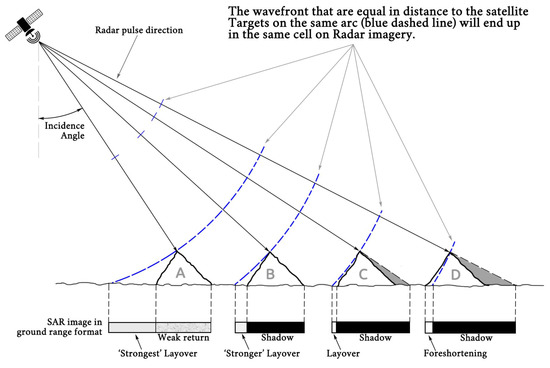
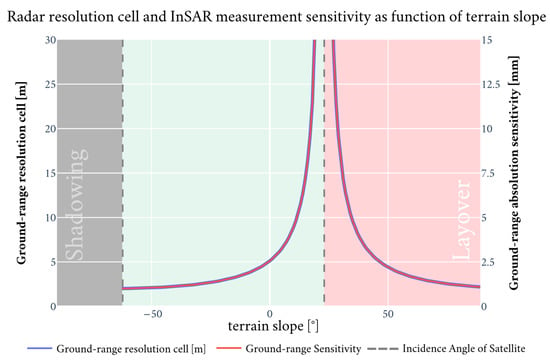
اعوجاج هندسی [ 15 ] بخشی از ماهیت جانبی ماهواره SAR است. اعوجاج هندسی تابعی از زاویه تابش، توپوگرافی موضعی (شیب) و تفکیک محدوده شیب است. سه نوع متداول اعوجاج هندسی در شکل 3 نشان داده شده است که عبارتند از کوتاه کردن، layover و سایه زدن.
اعوجاج هندسی یک نگرانی خاص برای نظارت بر شیب ها است. شکل 3 نشان میدهد که شیب رو به ماهواره به پیکسلهای کمتری در جهت برد SAR فشرده میشود، که به عنوان جلوه کوتاهکننده و اثر فاصلهگذاری شناخته میشود. این همچنین نشاندهنده وضوح فضایی پایینتری برای سمت شیب رو به ماهواره است. شیب رو به دور از ماهواره در تئوری وضوح فضایی بهتری خواهد داشت، اما بسته به شیب شیب، ممکن است شیب یا به طور کامل توسط قله کوه سایه بیفتد ( شکل 3 ) یا سیگنال های بازگشتی بسیار ضعیفی بدهد ( شکل 4 ). برای نظارت بر شیب، میخواهیم به سه سؤال مطرح شده در بخش 1 پاسخ دهیم که عبارت است از:
برای یک شیب زمین ثابت، هرچه اختلاف بین زاویه فرود و شیب زمین (در جهت محدوده) بیشتر باشد، وضوح و حساسیت بهتر است ( شکل 5 ) [ 15 ]. با این حال، از نظر بدست آوردن یک SNR خوب برای پراکنده های توزیع شده، مطلوب است که سیگنال ورودی تا حد امکان متعامد به سطح شیب باشد ( شکل 4 ) [ 17 ، 18 ، 19 ]. انتخاب نهایی زاویه تابش باید SNR را در برابر وضوح متعادل کند.
چرا برای نتایج InSAR به SNR خوب نیاز داریم؟ به این دلیل است که SNR با دقت اندازه گیری InSAR مرتبط است. رابطه بین SNR و پراکندگی اندازهگیریهای جابجایی در امتداد خط دید (LoS) را میتوان به صورت زیر تقریب زد [ 20 ]:
جایی که σLoاسپراکندگی جابجایی در امتداد LoS است، σϕپراکندگی فاز است، λطول موج است.
3.2.2. شبیه سازی اعوجاج هندسی
ایجاد یک نقشه شبیه سازی سریع و ساده از اعوجاج هندسی بر اساس DEM موجود و زاویه تابش ماهواره بسیار مفید است. شبیه سازی به ما کمک کرد تا زاویه فرود را بهتر انتخاب کنیم تا تأثیر اعوجاج هندسی را برای SoI داده شده به حداقل برسانیم [ 21 ، 22 ]. با توجه به شکل 3 ، محاسبه میزان پیش کوتاه کردن و layover آسان است، اما محاسبه منطقه سایه کمی پیچیده تر است. با این حال، برای این پروژه، ما مسیر رو به شیب را برای تضمین SNR کافی در شیب ترجیح می دهیم. بنابراین، دیگر نیازی به نقشه برداری دقیق از ناحیه سایه نیست. بنابراین می توان از الگوریتم ساده زیر برای شبیه سازی اعوجاج هندسی استفاده کرد:
resampled_DEM = resample_from_latlon(DEM, resampled_coordinate=radar)
برای خط در resampled_DEM:
برای پیکسل در خط:
local_incidence_angle = incidence_angle - شیب
normalized_local_incidence_angle = (90-local_incidence_angle) / 90
بازگشت عادی_محلی_حادثه_زاویه
به این ترتیب، اعوجاج هندسی را به سادگی با محاسبه زاویه تابش محلی شبیه سازی می کنیم.
3.3. بررسی سریع با چند تداخل و نقشه انسجام در هر آهنگ
اینترفروگرام و نقشه انسجام به عنوان یک بررسی سریع قبل از پردازش MTInSAR عمل می کند. پس از شبیهسازی اعوجاج هندسی، و اگر بودجه اجازه میدهد، سفارش دادن چند جفت تصویر SAR در هر آهنگ، کار خوبی است. با داده های واقعی می توانیم موارد زیر را بررسی کنیم:
3.4. تجزیه و تحلیل سری زمانی چند زمانی
پس از انتخاب پیکربندی بهینه ماهواره، MTInSAR انجام خواهد شد. این روش قبلاً به خوبی در [ 5 ] مورد بحث قرار گرفته است و در اینجا توضیح داده نخواهد شد. با این حال، برای این پروژه خاص، دو مرحله وجود دارد که از الگوریتم کلاسیک منحرف میشود که نیاز به توضیح دارد.
3.4.1. اثر جوی در یک منطقه کوچک را نادیده بگیرید
نشان داده شده است که صفحه فاز اتمسفر (APS) یک سیگنال با طول موج بلند است و طول همبستگی چند صد متری دارد. میتوانیم تأثیر آن را در یک منطقه نسبتاً کوچک، مثلاً چند صد متر تا یک کیلومتر، کوچک فرض کنیم و از آن غفلت کنیم [ 23 ]. پس از این فرض، برای یک منطقه نسبتا کوچک، موارد زیر را خواهیم داشت:
جایی که Δϕاختلاف فاز دوگانه است: تفاوت بین هدف و پیکسل مرجع، تفاوت بین تاریخ های master و slave. هنگامی که جزء جو نادیده گرفته می شود، مسئله به یک مسئله بهینه سازی ساده برای یافتن مقدار صحیح تغییر شکل و ارتفاع نقطه تبدیل می شود، به طوری که سطح نویز به حداقل می رسد (انسجام زمانی به حداکثر می رسد) [ 23 ]:
در اینجا لازم به ذکر است که تغییر شکل^لزوماً نرخ تغییر شکل نیست. همچنین می تواند سری زمانی تغییر شکل باشد. اگر بتوان حرکت مورد انتظار را به خوبی با خطی بودن مدلسازی کرد، در این صورت خواهیم داشت تغییر شکل^=v^·تی. برای حرکت غیر خطی، یک مدل ناپارامتریک می تواند در جایی که هیچ سرعتی تخمین زده نمی شود استفاده شود ( برای جزئیات به بخش 3.4.2 مراجعه کنید).
این مسئله بهینه سازی در معادله ( 4 ) لزوماً همگرا نیست، اما می توانیم فضای جستجو را برای یافتن راه حل بهینه تعریف کنیم. این معمولاً به عنوان رویکرد پریودوگرافی [ 7 ] نامیده می شود. حداکثر مقدار مطلق پریودوگرام معمولاً به عنوان انسجام زمانی نامیده می شود. γ) با توجه به مرجع:
جایی که γیک مقدار بین 0 و 1 است. 1 به این معنی است که مدل (ارتفاع و تغییر شکل تخمینی) کاملاً با داده های مشاهده شده مطابقت دارد و بالعکس.
لازم به ذکر است که InSAR و MTInSAR همه اندازه گیری های نسبی هستند. در هر ناحیه کوچک، تغییر شکل نسبی بین هر نقطه و نقطه مرجع انتخاب شده را اندازه گیری می کنیم. برای این منظور، نقطه مرجع باید پایدار باشد. در این پروژه، اطلاعات قبلی مبنی بر پایداری کلی بزرگراه وجود دارد. از این رو برای هر منطقه کوچک می توان نقطه مرجع نزدیک جاده را انتخاب کرد و حرکت شیب ها را با توجه به این مرجع بررسی کرد.
3.4.2. مدل ناپارامتری برای حرکت غیر خطی
در پردازش کلاسیک MTInSAR، باز کردن نقاط در زمان با فرض یک مدل پارامتریک در معادله ( 4 ) انجام می شود. این فرض برای حرکتی که می تواند به خوبی با یک مدل پارامتری (به عنوان مثال، خطی، درجه دوم یا فصلی) مدل شود، عالی عمل می کند، اما برای رفتار نامنظم، این می تواند منجر به خطاهای باز کردن و سطح پایین اطمینان شود. تکنیکی که می تواند به خوبی کار کند یک مدل غیر خطی غیر پیشینی است. مدل غیر پیشینی با تخمین مولفه پایین گذر با استفاده از میانگین متحرک وزنی خط پایه زمانی پنج نمونه ای انجام می شود و این عبارت فاز باقیمانده را به عنوان تخمین سهم حرکت غیرخطی [ 24 ] فرض می کنیم. ثابت شده است که مدل غیر خطی زمانی که تصاویر کافی وجود دارد که به طور منظم نمونه برداری می شوند بسیار خوب عمل می کند [24 ].
3.4.3. انتخاب مقدار آستانه انسجام زمانی
پس از فرآیند MTInSAR، ما می خواهیم فقط نقاطی را انتخاب کنیم که “آموزنده” هستند. روش آستانه گذاری Otsu [ 25 ] برای این فرآیند اعمال می شود.
ابتدا هیستوگرام انسجام زمانی را برای همه نقاط رسم می کنیم. با وجود نقاط پر سر و صدا، هیستوگرام معمولاً دووجهی به نظر می رسد، جایی که “به هم ریختگی” سمت چپ نقاط پر سر و صدا را نشان می دهد و “به هم ریختگی” سمت راست نقاط آموزنده را نشان می دهد. روش اوتسو آستانه ای را پیدا می کند که واریانس بین طبقاتی را به حداکثر می رساند. یک مثال در شکل 6 نشان داده شده است . در این مثال، اکثر نقاط دارای نویز هستند، اما شکل دووجهی در هیستوگرام واضح است. در این پروژه، آستانه به نزدیکترین 0.05 گرد می شود.
4. AoI و تصاویر موجود
AoI بخشی از بزرگراه I-77 ایالات متحده است که بین مایل پست (MP) 0.0 و MP 8.0 در شهرستان کارول، ویرجینیا (VA) قرار دارد. به دلیل تغییرات چشمگیر در زمین، شیب های برش متعددی در طول جاده ایجاد شد. نوع سنگ اصلی از متاگری واک تشکیل شده است. از آنجایی که ساختار زمینشناسی شامل گسلهای گسترده و چینخوردگی پیچیده است، پایداری شیب برای دهههای گذشته موضوعی حیاتی بوده است. چندین ناپایداری شیب در طول سالیان در این بخش گزارش شده است. بنابراین، VDOT منابع قابل توجهی را صرف تعمیر و نگهداری شیب و عملیات اصلاحی در این بخش کرده است [ 26 ، 27 ].
AOI در شکل 7 الف نشان داده شده است. ارزیابی ما بر روی شیب I-77 همانطور که در کادر قرمز در شکل 7 الف نشان داده شده است متمرکز است، به ویژه شیب سمت غرب بزرگراه، زیرا آنها کسانی هستند که خطراتی را برای جاده ایجاد می کنند.
ارتفاع زمین محلی از مدل رقومی ارتفاع (DEM) با وضوح بالا (1.5 متر × 1.5 متر) به دست می آید ( شکل 7 ب). ارتفاع I-77 از 450 متر (MP 0.0) به 850 متر (MP 8.0) با شیب متوسط 0.17:1 افزایش می یابد. تندترین شیب می تواند به 0.25:1 تا 0.5:1 برسد. شیب متعامد به بزرگراه بین 0.2:1 تا 0.5:1 است.
تصاویر موجود که برای این پروژه استفاده شده اند در جدول 1 آمده است.
5. نتایج
5.1. فاز 1: تجزیه و تحلیل داده های تاریخی برای انتخاب بهترین پیکربندی برای پروژه نظارت
فاز 1 تمام تصاویر موجود را برای انتخاب بهترین پیکربندی ارزیابی کرد. ارزیابی بر عملکرد InSAR در دامنههای منافع متمرکز بود. پیکربندی انتخاب شده کمترین اعوجاج هندسی را دارد و در عین حال SNR مناسبی را به همراه خواهد داشت. در این بخش، نقشه تشخیص تغییر تجمعی، نقشه شبیهسازی اعوجاج هندسی و چند تداخل را نشان میدهیم. بر اساس نتایج ما بهترین ماهواره و پیکربندی را برای فاز 2 ارزیابی می کنیم.
5.1.1. شدت تغییر نقشه و مکان های تاریخی زمین لغزش
در این بخش، نمونه ای از نقشه تغییر شدت تجمعی از مسیر نزولی ERS-1&2 97 را نشان می دهیم. همانطور که در شکل 8 نشان داده شده است ، نقشه تغییر تجمعی تغییرات شدت را در طول دوره اکتساب داده ارائه می دهد. چندین مکان با تغییرات تجمعی قابل توجه به خوبی با مکان های تاریخی زمین لغزش/سنگ ریزش مطابقت دارند. حتی با وضوح فضایی کم و اعوجاج هندسی قوی در دادههای ERS1&2، هنوز هم میتوان تعدادی از مکانهای تغییرات مهم در گذشته را شناسایی کرد. برای ALOS-1، به دلیل تعداد محدودی از تصاویر موجود، تغییر قابل توجهی مشاهده نمی شود.
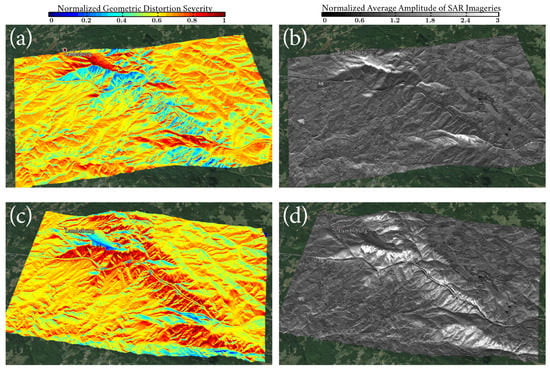
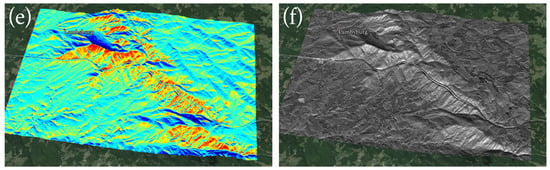
5.1.2. نقشه اعوجاج هندسی شبیه سازی شده و نقشه شدت
این بخش نقشه اعوجاج هندسی شبیه سازی شده و نقشه شدت را نشان می دهد. تمرکز بر روی شیب سمت غربی بزرگراه است. اولین چیزی که باید به آن توجه کرد این است که گذر صعودی دارای عقب نشینی و کوتاه شدن شدید برای SoI ما نیست ( شکل 9 الف)، اما همچنین ما شاهد پراکندگی نسبتاً پایینی در آنجا هستیم ( شکل 9 ب). در مورد مسیرهای نزولی، زاویه برخورد بزرگتر اعوجاج هندسی کمتری ایجاد می کند. نقشه شدت در SoI نیز از نتایج شبیه سازی پشتیبانی می کند. نقشه انعکاس ژئوکد شده با زاویه تابش بزرگتر نیز “جزئیات دقیق تر” (رزولیشن بالاتر) را در SoI نشان می دهد. این به خوبی با شکل 5 مطابقت دارد .
برای انتخاب بهترین کاندید، ابتدا مسیر صعودی را رد می کنیم. Backscatter/SNR در SoI بسیار کم است و ما در خطر دریافت اثر سایه نیز هستیم. در بین دو مسیر نزولی، یکی با زاویه تابش بزرگتر، 56.2∘، اعوجاج هندسی کمتر و وضوح فضایی بهتری می دهد.
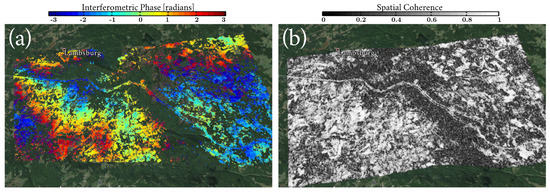
5.1.3. تداخل نگاشتها و نقشه های انسجام
باند X با وضوح بالا COSMO
نمونههایی از تداخلنگارها و نقشههای انسجام مربوطه برای COSMO در اینجا نشان داده شدهاند. یک آستانه انسجام 0.6 برای رسم اعمال می شود.
مسیر نزولی با زاویه تابش بزرگتر بهترین نتیجه را می دهد. مسیر صعودی ( شکل 10 الف) طرح کلی بزرگراه را نشان می دهد، اما سیگنال منسجم بسیار کمی در شیب ها وجود دارد، یا به دلیل اثر سایه یا سیگنال کم پراکندگی عقب. مسیر نزولی با 33.9 ∘زاویه تابش ( شکل 10 ج) نه انسجام را در جاده و نه در شیب نشان می دهد، به احتمال زیاد به دلیل اعوجاج هندسی قوی. این نتیجه به خوبی با استنتاج قبلی از شبیهسازی اعوجاج هندسی مطابقت دارد.
لازم به ذکر است که تا پایان فاز 1 بیش از یک جفت اینترفروگرام برای هر آهنگ موجود است. همه جفتهای اینترفروگرام از یک گراف MST پردازش شدند. فقط نمونه های منتخب در این مقاله گنجانده شده است. علاوه بر این، از آنجایی که انسجام تداخلگرام را میتوان تحت تأثیر عوامل زیادی قرار داد، سعی میکنیم تداخلنگاریهایی را با پارامترهای نزدیکترین حد ممکن (یعنی خط مبنا مکانی، خط پایه زمانی، زمان سال و غیره) برای مقاصد مقایسه انتخاب کنیم. نتیجه گیری انحصاری هنوز در مسیر نزولی 56.2 ادامه دارد ∘زاویه بروز برای به دست آوردن بهترین انسجام
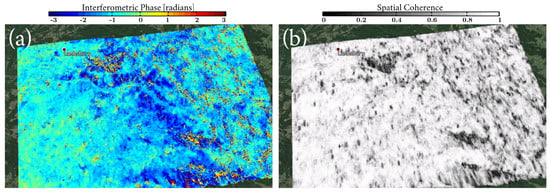
جایگزین: باند L
گزینه دیگر باند L است. در واقع، از آنجایی که باند L در مناطق پوشش گیاهی بسیار بهتر از باند C و X عمل می کند، باید کاندیدای برتر برای این پروژه باشد. شکل 11 نمونه ای از داده های ALOS-1 را نشان می دهد. حتی با خط پایه زمانی 46 روز و خط پایه فضایی 675 متر، تداخل نگاری تقریباً در همه جا بسیار منسجم بود. در حال حاضر، ALOS-1 دیگر عمل نمی کند. نسل جدید ALOS-2 دارای وضوح فضایی بهتر (3 متر در دسترس) و زمان بازدید مجدد کوتاهتر (14 روز) است. بر اساس ویژگی های سیگنال باند L و مشخصات ALOS-2، باید کاندیدای ایده آل باشد.
5.1.4. ارزیابی بهترین پیکربندی
اکنون ما همه عناصر را برای انتخاب بهترین پیکربندی داریم. این کار را با بررسی سوالات فصل اول انجام می دهیم.
-
مناسب ترین طول موج کدام است؟ از اینترفروگرام ها مشخص است که باند L بهترین انسجام را می دهد. دادههای ERS باند C تداخلنگارهای منسجمی را ارائه نمیدهند (و بنابراین در این مقاله هیچ کدام را نشان ندادیم). برای باند X COSMO-SkyMed، بدترین عملکردها را باید از نظر انسجام تداخل سنجی انتظار داشت. با کمال تعجب، نتایج این کار ثابت میکند که با وجود ویژگیهای زمین (پوشش گیاهی و شیبهای تند)، هنوز هم میتوان تداخلنگارهای منسجمی را در مکانهای خاص، به عنوان مثال، بزرگراه و شیبهای صخرهای لخت به دست آورد. دلیل چنین عملکردهایی وضوح بالا و زمان بازنگری بسیار کوتاه صورت فلکی COSMO است، جایی که زمان بازبینی کوتاهتر اثر همبستگی زمانی را جبران میکند.
با این وجود، نکته دیگری که باید در نظر گرفت این است که باند X نسبت به باند L نسبت به حرکت حساس تر است. هنگامی که نرخ تغییر شکل مورد انتظار در مقیاس چند میلی متر در سال باشد، باند X نسبت به باند L به چنین حرکتی حساس تر خواهد بود.
-
بهترین گزینه برای زاویه تابش چیست؟ بر اساس شبیه سازی ها، مشخص است که مدار نزولی با زاویه تابش 56.2 درجه، کوچکترین اعوجاج هندسی را در بین تمام مسیرهای نزولی ایجاد می کند.
-
فرکانس بازدید مجدد مناسب چیست؟ انسجام به طور تصاعدی برای بازبینی زمان کاهش می یابد [ 28 ]. باند L انسجام بیشتری در مناطق پوشش گیاهی می دهد، بنابراین زمان بازبینی طولانی تری را می توان پذیرفت، یعنی 40 روز یا حتی بیشتر. در مورد باند X، زمان بازبینی مجدد بسیار کوتاهتری برای محاسبه همبستگی زمانی مورد نیاز است. بر اساس تداخلنگارهای موجود، زمان بازبینی مجدد مناسب برای باند X باید بسیار کوتاهتر از باند L باشد. در این مورد، یک زمان بازبینی 8 روزه برای COSMO پیشنهاد شده است.
-
آیا باید از داده های صعودی یا نزولی استفاده کرد؟ در مقایسه بین COSMO نزولی و صعودی، پس واضح است که مسیر نزولی باید برای دادن SNR و انسجام بالاتر در SoIs انتخاب شود.
-
چه تفکیک مکانی/جغرافیایی را می توان برای این پروژه پذیرفت؟ این پروژه بزرگراه ها و شیب ها را پایش می کند. فلس های این دو نوع معمولاً فقط چند متر تا چند صد است. این بدان معنی است که وضوح باید در مقیاس چند متر باشد تا تعداد نقاط کافی از اهداف مورد نظر را نشان دهد. از بین تمام دادههای موجود، ماهواره با وضوح بالا باند X (COSMO و TerraSAR-X) دارای وضوح 3 متر و باند L ALOS-2 دارای وضوح 3 تا 10 متر است.
-
برای پردازش از چه رویکردی باید استفاده کرد؟ رویکرد ایده آل، رویکرد پراکنده های پایدار است. رویکرد SBaS معمولاً چند نگاه و فیلتر فضایی را انجام می دهد [ 8 ]، از این رو وضوح فضایی نتیجه نهایی را کاهش می دهد. از سوی دیگر، رویکرد PS، SNR را با وضوح فضایی مبادله نمیکند. این پروژه در حال حاضر مناطق بسیار کوچک را نظارت می کند، بنابراین کاهش وضوح مکانی توصیه نمی شود.
به طور خلاصه، بهترین کاندید برای فاز بعدی، باند L، مسیر نزولی با زاویه برخورد نسبتاً بزرگ (یعنی 50) خواهد بود. ∘) رزولوشن 3 متر و زمان بازدید مجدد 28 روز ترجیح داده می شود (یا حتی بیش از 40 روز می تواند انجام شود). ALOS-2 تنها موردی است که میتواند تمام الزامات را با حالت فوقالعاده ریز نقشه (SM1) خود برآورده کند [ 29 ]. نایب قهرمان COSMO یا TerraSAR-X خواهد بود (این دو مشخصات بسیار مشابهی دارند)، همچنین مسیر نزولی با وضوح 3 متر، زمان بازدید مجدد 10 روز یا بهتر. زمان بازبینی کوتاه تر، همبستگی زمانی را جبران می کند.
ما صرفاً به دلیل در نظر گرفتن بودجه، COSMO را انتخاب کردیم. پیکربندی نهایی مسیر نزولی COSMO، حالت نقشه نواری، با زاویه برخورد 56.2 درجه و زمان بازبینی 8 روزه است.
5.2. فاز 2: فرآیند InSAR چند زمانی
این بخش نتایج MTInSAR را نشان می دهد. کل AoI از MP0.0 تا MP8.0 به پنج ناحیه کوچکتر تقسیم می شود. هر منطقه کوچک شامل یک شیب با سنگ یا خاک برهنه است که یک خطر بالقوه دارد. مناطق بر اساس حوادث گذشته انتخاب می شوند. شکل 12 مکان و اندازه هر منطقه کوچک را نشان می دهد. در بخش های بعدی به آنها به عنوان مناطق کوچک A، B، C، D و E اشاره می شود.
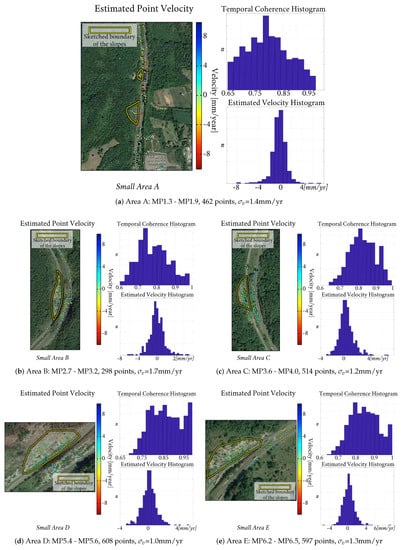
5.2.1. مروری بر مناطق کوچک
ما با مروری بر هر پنج منطقه کوچک شروع می کنیم. شکل 13 سه محصول را برای هر ناحیه کوچک گزارش می کند: نقشه سرعت تخمینی، هیستوگرام انسجام زمانی و هیستوگرام سرعت تخمینی. انحراف استاندارد سرعت تخمینی ( σv) به همراه هیستوگرام نیز می آید. انحراف استاندارد نشانگر خوبی است برای اینکه آیا سرعت تخمینی یک نقطه منفرد از نظر آماری معنی دار است یا خیر. به عنوان مثال، ارزش بررسی نقاطی با سرعت تخمینی بیش از دو برابر انحراف استاندارد (سطح اطمینان 95 درصد) را دارد.
شکل 13 نشان می دهد که پنج ناحیه کوچک به طور کلی پایدار هستند. حدود 95٪ از نقاط دارای نرخ کمتر از 3 میلی متر در سال در طول LoS (دو برابر). σv). در اکثر موارد، هیچ نشانه ای از تغییر شکل منطقه ای قابل توجهی در هیچ یک از شیب ها مشاهده نشد. برخی از نقاط در شیب ها سرعت قابل توجهی را نشان می دهند، اما این موارد عمدتاً موارد منزوی هستند، به این معنی که یا دامنه ضربه بسیار کوچک است (فقط چند متر را تحت تأثیر قرار می دهد) یا نقاط دارای نویز خالص هستند.
5.2.2. چند نمونه PS نماینده
این بخش چهار نمونه معرف را نشان می دهد.
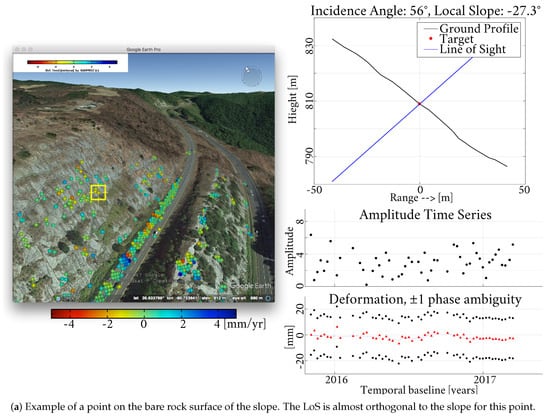
-
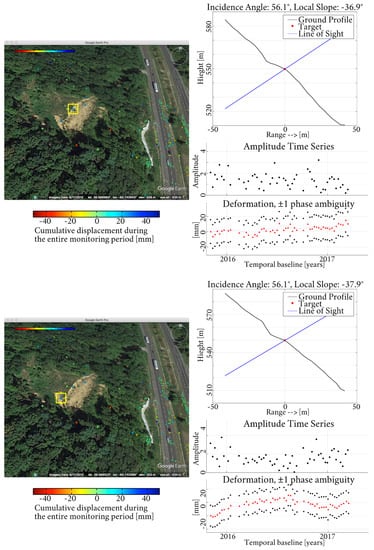
اولین نقطه در شکل 14 a در شیب قرار دارد و به نظر می رسد در امتداد LoS پایدار باشد. با این حال، قسمت سمت راست بالای شکل 14 a نشان میدهد که جهت LoS تقریباً متعامد با شیب است، و استنباط میکند که هندسه انتخابشده به هر نشستی در طول شیب حساس نیست. در حالی که ما برای جلوگیری از اعوجاج هندسی تا حد ممکن یک زاویه تابش را انتخاب کردیم، اجتناب از اعوجاج هندسی در همه جا دشوار بود.
-
نقطه دوم در شکل 14 ب در پای تپه قرار دارد. این نقطه یک “برآمدگی” ناگهانی را در سری های زمانی نشان می دهد اما قبل و بعد از برآمدگی ثابت می ماند.
-
نقطه سوم در شکل 15 ج نیز در پای تپه قرار دارد. به لطف رویکرد غیر خطی ذکر شده در بخش 3.4.2 ، ما قادریم چنین حرکت غیرخطی نقطه را تشخیص دهیم. بر اساس بررسی های میدانی، این شتاب در پایان دوره پایش احتمالاً ناشی از ترک های خندق بتنی است. ترک ها ممکن است با حرکتی در نوک شیب همراه باشند یا ممکن است در اثر فرسایش آبی خاک های سطحی ایجاد شوند.
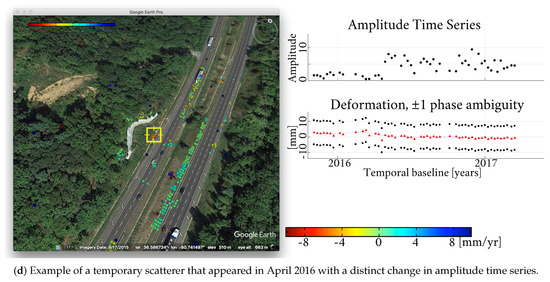
-
آخرین نمونه در شکل 15 d یک پراکنده موقت است که فقط برای بخشی از دوره نظارت وجود داشته است. تغییر مشخص در سری های زمانی دامنه مشخصه چنین پراکنده های موقتی است.
6. تفسیر و آثار میدانی
6.1. مطالعه موردی 1: نصب مش فلزی مشاهده شده از InSAR
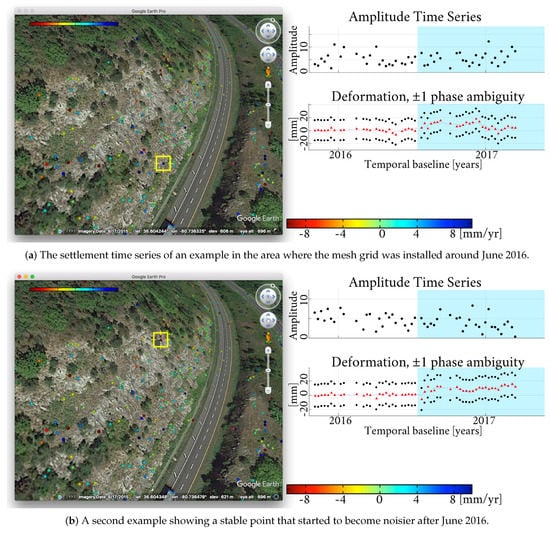
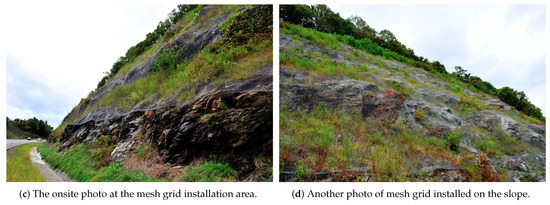
تعدادی از نقاط در منطقه B رفتار مشابهی را در سری زمانی خود نشان دادند: قبل از ژوئن 2016 بسیار پایدار، پس از آن بسیار پر سر و صداتر. به نظر می رسد که یک شبکه فلزی در حدود ژوئن 2016 روی شیب کشیده شده است [ 30 ]. برای جلوگیری از ریزش سنگ در بزرگراه زیر، کل صفحه سنگ با مش سیم فولادی (که با پیچ سنگ محکم شده بود) محافظت می شد.
آیا سیگنالی که در شکل 15 می بینیم می تواند از نصب مش فلزی نشات بگیرد؟ از لحاظ تئوری، مش فلزی (معمولا یک شبکه فلزی نازک) نباید سیگنال SAR را زیاد تغییر دهد، زیرا سیگنال رادار باید بتواند به شبکه مش نفوذ کند (طول موج باند X 31 میلی متر است، در حالی که اندازه سوراخ های روی مش باید باشد. حداقل چند دسی متر). با این حال، فرآیند نصب مش فلزی می تواند با محیط محلی تعامل داشته باشد و متعاقباً باعث ایجاد تغییراتی در شیب که توسط SAR گرفته می شود. دو مثال در شکل 15e,f احتمالاً سوابق چنین حرکت ناگهانی مربوط به قسط مش در ژوئن 2016 است. به طور خاص، هر دو نمونه یک سری زمانی فاز ثابت را تا ژوئن 2016 نشان میدهند و پس از آن سیگنالهای بسیار پر سر و صدای بیشتری را به دنبال دارد. چند نکته دیگر نیز الگوهای تغییر مشابهی را نشان می دهد.
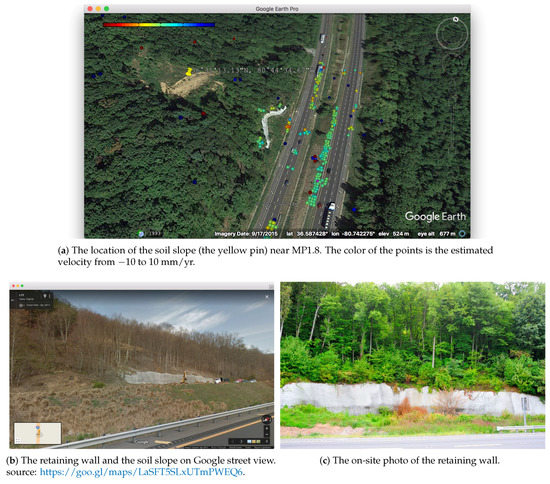
6.2. مطالعه موردی 2: شیب خاک و دیوار حائل در MP1.8 در منطقه A
6.2.1. شیب در MP1.8
توجه ویژه به شیب واقع در MP1.8 I-77 داده شده است. توجه به دلیل حرکت شناخته شده گذشته است که توسط شیب سنج درجا نظارت می شود. مرجع افزایش از 0.5 اینچ (1.27 سانتی متر) به 4 اینچ (10.16 سانتی متر) را طی سه سال گذشته نشان می دهد. VDOT همچنین اقدام به ساخت یک دیوار حائل درست در زیر شیب خاک کرده است. در این مطالعه موردی، ما میخواهیم بررسی کنیم که آیا حرکات در این مکان توسط ماهواره SAR قابل تشخیص است یا خیر.
شیب خاک یک هدف مشاهده بهینه برای InSAR نیست، به ویژه برای طول موج های کوتاه تر مانند باند X. جدا از اینکه باند X نفوذ بدتری روی پوشش گیاهی و خاک دارد، باند X نیز نسبت به باند L به حرکت کوچک حساستر است که برای این مورد خاص مطلوب نیست.
برای محاسبه هرگونه حرکت غیر خطی در شیب خاک، مدل ناپارامتریک ذکر شده در بخش 3.4.2 را اعمال کردیم . برای این مورد خاص، از اندازه پنجره بزرگتر از اندازه پیش فرض استفاده شد، زیرا منطقه نویزتر است. با این عملیات هموارسازی اضافی، چند نقطه دیگر در شیب استخراج کردیم که روند حرکت را با مقدار انسجام زمانی رضایتبخش نشان میدهد. چند نمونه در شکل 16 نشان داده شده است. با این وجود باز هم باید به این نکته اشاره کرد که سری های زمانی فاز 2 دارند πابهام، و خط جامد آبی که نشان دهنده سری زمانی تخمینی است، محتمل ترین روند خارج از همه احتمالات است.
نمونههای گزارششده در اینجا همچنان حرکات پیچیدهتری را نشان میدهند و با وجود صافکردن بیشتر، همچنان پر سر و صداتر هستند. علاوه بر این، هیچ گروهی از نقاط که رفتار همگن را در سری های زمانی نشان می دهند در این شیب یافت نشد. نقاط گزارش شده با انسجام بالا کم و بیش همگی مجزا هستند. در نتیجه، با توجه به ویژگی های فیزیکی تعامل بین مایکروویو و زمین خاک، این شیب در تصاویر SAR نویز به نظر می رسد. با یک فیلتر صاف اضافی، میتوانیم چند نقطه با انسجام زمانی خوب خروجی بگیریم، اما هیچ اطلاعات قطعی در مورد حرکت شیب به دست نمیآید.
6.2.2. موقعیت جغرافیایی نقاط چقدر خوب است؟
مطالعه پایداری دیوار حائل درست در زیر شیب خاک آموزنده است. اگر دیوار حائل در حال حرکت باشد، ممکن است شیب خاک در بالا نیز متحرک باشد. به همین دلیل است که تعیین پایداری دیوار حائل اهمیت دارد. برای شروع، در شکل 17 a ما متوجه برخی نقاط در خارج از دیوار حائل سفید در تصاویر Google Earth می شویم. میخواهیم بفهمیم که آیا این نقاط واقعاً باید روی دیوار حائل باشند یا خیر. اگر روی دیوار حائل هستند چرا زمین یابی این نقاط اشتباه است؟
به طور کلی، دقت موقعیت جغرافیایی نقاط InSAR بهتر از وضوح پیکسل است. با این حال، بسیاری از عوامل میتوانند مقداری تغییر در زمینیابی ایجاد کنند، بهعنوان مثال، اعوجاج هندسی، اثر لوبهای جانبی، اثر مسیرهای چندگانه و غیره. در این مورد، با بررسی موقعیت نقاط PS در تصاویر SAR، میتوان نتیجه گرفت که نقاط نزدیک دیوار سفید در تصاویر Google Earth در واقع متعلق به دیوار سفید است.
شکل 18 نقاطی را با تصاویر Google Earth و تصاویر SAR به عنوان پسزمینه نشان میدهد. در تصاویر SAR، میتوانیم ببینیم که نقاط در “نوار روشن” قرار دارند، که به وضوح از دیوار حائل سفید رنگی که بخش قابل توجهی از سیگنال رادار را منعکس میکند، میآید و در تصاویر SAR بسیار روشنتر از محیط اطراف است. عدم تطابق جزئی مکان دیوار بین تصاویر Google Earth و تصاویر SAR به احتمال زیاد نتیجه اعوجاج شدید هندسی تصاویر SAR است.
7. بحث
7.1. چگونه شیب ها را بهتر نظارت کنیم؟
7.1.1. رابطه بین سرعت تخمینی و شیب محلی
InSAR حرکت زمین پیش بینی شده در جهت LoS را اندازه گیری می کند. برای سیستم رادار، دو مفهوم ناشی از این هندسه وجود دارد.
در وهله اول، از آنجایی که ماهواره راداری در مدارهای قطبی همزمان با خورشید، در حدود 10 درجه از جهت شمال به جنوب پرواز می کند، پس هر حرکت شمال-جنوب به سختی در جهت LoS پیش بینی می شود. بسته به زاویه تابش، سهم اکثریت در اندازه گیری LoS، حرکت شرق-غرب و عمودی خواهد بود.
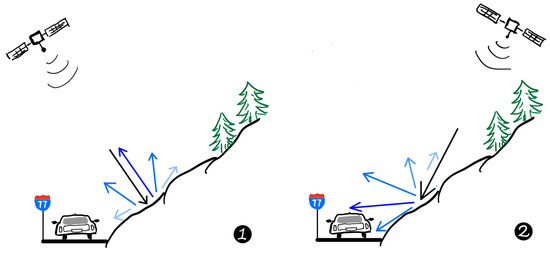
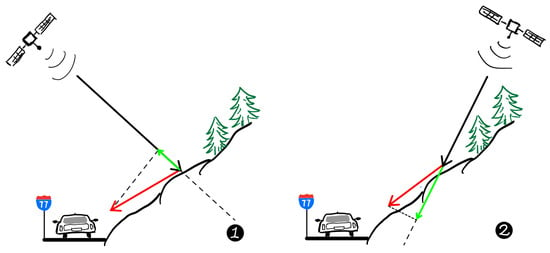
نکته دوم به نحوه ثبت حرکت شیب های ناپایدار توسط ماهواره راداری مربوط می شود. یک فرض این است که سطح در امتداد شیب به دلیل نیروی گرانش به پایین می لغزد. شکل 19 این فرضیه را نشان می دهد. وقتی ماهواره رو به دور از شیب قرار می گیرد، سطح ناپایدار از ماهواره دور می شود. با این حال، زمانی که ماهواره رو به شیب است، بسته به شیب شیب، سطح ناپایدار یا به سمت ماهواره حرکت می کند یا از آن دور می شود. در بدترین حالت که LoS متعامد به شیب باشد، آنگاه طرح ریزی نزدیک به صفر خواهد بود به این معنی که ماهواره قادر به ثبت حرکت سطح زمین در امتداد شیب نخواهد بود. شکل 19-1 موردی را نشان می دهد که در آن سطح شیب به سمت ماهواره در امتداد جهت LoS در حال حرکت به سمت پایین تپه است. درک این مکانیسم به تفسیر نتایج کمک می کند.
7.1.2. یک طرح ممکن برای نظارت بر شیب خاک: نصب بازتابنده های گوشه ای
ویژگی های فیزیکی برهمکنش بین امواج مایکروویو و خاک تعیین می کند که سیگنال حرکت تحت تأثیر نویز قرار می گیرد. تکنیکهای پردازش پیشرفته ممکن است نویز را سرکوب کند، اما زمانی که از یک سطح معین فراتر رود، دیگر نمیتوان اطلاعات را استخراج کرد. یک راه حل عملی برای نظارت بر شیب های از این نوع، نصب بازتابنده های گوشه ای است.
بازتابنده گوشه یک پراکنده قوی ساخته دست بشر است که اغلب نسبت سیگنال به نویز بسیار بالایی را در تصاویر SAR نشان می دهد. یک بازتابنده معمولاً از دو یا سه صفحه فلزی ساخته میشود که متقابلاً بر یکدیگر عمود هستند و سیگنالها را مستقیماً به سمت منبع منعکس میکنند. بازتابنده های گوشه ای به راحتی ساخته می شوند، مقرون به صرفه و نصب آسان هستند. به منظور نظارت بر شیب، بازتابنده های گوشه ای را می توان در مکان های مختلف روی سطح شیب نصب کرد. پس از نصب، آنها به عنوان پراکنده دائمی در تصاویر SAR عمل می کنند. تا زمانی که مسیر ماهواره به بازتابنده مسدود نشده باشد، می توان سری زمانی فاز را استخراج کرد.
پیاده سازی این تکنیک آسان است و به ویژه برای ویژگی های پیچیده زمین خوب کار می کند. این بازتابنده در برابر ویژگی های زمین پر سر و صدا مانند پوشش گیاهی و خاک مقاوم است. این تکنیک بسیار بالغ است و قبلاً به خوبی در تعدادی از برنامه های نظارتی اعمال شده است [ 3 ، 4 ].
7.1.3. نحوه بهبود نتیجه پایش شیب خاک از سمت الگوریتم: مقایسه با سایر تکنیک های پردازش پیشرفته
موضوع مهم دیگر این است که چگونه می توان نتیجه نظارت را صرفاً از نقطه نظر الگوریتم بهبود بخشید. روش PSI که ما در این مطالعه استفاده کردهایم برای کارکرد بهتر با پراکندههای بازتابی قوی مانند پراکندههای پایدار طراحی شده است. اما برای پراکندههای توزیعشده [ 31 ] که سیگنال بازتابی غالب ندارند، SNR بسیار پایینتر خواهد بود و PSI تحت تأثیر نامطلوب قرار میگیرد.
برای غلبه بر این اثر همبستگی فضایی پراکنده های توزیع شده، دو گزینه دیگر موازی با رویکرد PSI وجود دارد. هر دو گزینه وابستگی مکانی پیکسل های همسایگی را در پردازش خود در نظر می گیرند. اولین رویکرد زیر مجموعه خط پایه کوچک (SBaS) [ 8 ] است. روش دیگر پردازش «پراکندههای توزیعشده» (DS) است، یا گاهی اوقات به عنوان روشهای ترکیبی از آن یاد میشود. روش DS ایده بسیار مشابهی با SBaS دارد به این معنا که “فیلتر فضایی” را نیز انجام می دهد (اما گاهی اوقات به روشی پیچیده تر، به عنوان مثال، محاسبه مجدد فاز اصلی تک معادل (ESM) با برآوردگر حداکثر درستنمایی (MLE) [ 32 ].]). برخلاف SBaS، روش ترکیبی از نتایج حاصل از پردازش PSI بهره میبرد (یعنی معمولاً DS با توجه به نزدیکترین نقطه PS باز میشود [ 32 ]). چند انحراف از روش ترکیبی وجود دارد اما همه آنها ایده مشابهی دارند: گروه بندی پیکسل های همسایگی با “رفتارهای مشابه” برای حذف نویز در هر پیکسل جداگانه و در نتیجه افزایش SNR. علاوه بر این، QPS [ 33روش ] را می توان به عنوان یک روش ترکیبی نیز به حساب آورد زیرا شباهت هایی با تکنیک SBaS و PSI دارد. در نتیجه، روش SBaS/Hybrid وضوح فضایی را برای دقت اندازهگیری (یا به طور معادل، SNR) و پوشش معامله میکند. عملیات هموارسازی در فضا احتمالاً نقاط DS بیشتری را به همراه خواهد داشت که SNR بالاتری را ارائه میکند اما به قیمت کاهش وضوح فضایی.
برای این پروژه، از آنجایی که نتیجه PSI در شیب خاک هنوز نسبتاً پر سر و صدا است، یک جایگزین ممکن ممکن است SBaS یا روش ترکیبی باشد. با این حال، بزرگترین چالش با این شیب خاک، اندازه شیب خاک است. از گوگل ارث می توان دریافت که اندازه شیب حداکثر 50 در 20 متر است. با دادههای 3 متری COSMO، اگر از یک پنجره چندنور 10 برای SBaS یا برای روش DS استفاده شود، کل شیب فقط 1 پیکسل خواهد بود. سری های زمانی مشتق شده از تنها 1 پیکسل برای نتیجه گیری صحیح کافی نیستند. اگر ما مجبور به نظارت بر یک منطقه بزرگتر هستیم، SBaS/DS ممکن است انتخاب بهتری باشد.
یکی دیگر از گزینه هایی که در پردازش PSI باید در نظر گرفته شود، اضافه کردن مدل های بیشتر در تخمین پریودوگرام است [ 34 ]. معمولاً بین نشست خاک و رطوبت یا دما رابطه علّی وجود دارد [ 35 ]. این بدان معناست که می توان مدل بارش و/یا مدل دما را در پردازش PSI اضافه کرد. مدلهای با ابعاد بیشتر (یعنی خطی و فصلی) معمولاً تناسب بهتری دارند و میتوانند اطلاعات بیشتری را در مورد حرکت نقاط نشان دهند. از طرف دیگر، ایجاد یک مدل پیچیده تر همیشه خطر دارد.
7.2. محدودیت ها و کاربرد داده های InSAR برای پایش شیب
7.2.1. یک سایز برای همه مناسب نیست!
در فاز 1، ما سعی کردیم یک پیکربندی بهینه جهانی را برای نظارت بر شیب انتخاب کنیم. به عنوان مثال، برای جلوگیری از اعوجاج کلی هندسی، یک زاویه تابش بزرگ را انتخاب کرده ایم. و ما باند X را به دلیل وضوح بالا و حساسیت به نشست در مقیاس کوچک انتخاب کردیم. با این حال، بعداً، چند نمونه را دیدیم که پیکربندی انتخاب شده برای آنها ایده آل نیست. برای مثال، زاویه تابش بزرگتر، قویترین اعوجاج هندسی را برای نقطه در شکل 14 a ایجاد میکند. یا باند X نقاط منسجمی را در شیب خاک در MP1.8 نشان نمی دهد ( بخش 6.2 ). در نتیجه، ممکن است “پیکربندی بهینه” وجود نداشته باشد که بتواند برای هر مکان در AoI به خوبی کار کند.
دو راه برای مقابله با موضوع وجود دارد. اولین مورد این است که متدولوژی پردازش متفاوت را بر این اساس اعمال کنید. به عنوان مثال، بخش 6.2 به استفاده از یک پنجره فیلتر بزرگتر برای مکان هایی با نویز بیشتر اشاره کرد. راه دوم استفاده از مجموعه داده های مختلف است. به عنوان مثال، برای مقابله با همبستگی شیب خاک، میتوانیم از دادههای باند L استفاده کنیم. اگر بودجه اجازه می دهد، همیشه بهتر است که با چندین مسیر یا چندین ماهواره نظارت کنید. در نتیجه، برای موارد نظارتی پیچیده، ممکن است پیکربندی ماهوارهای «یک اندازه مناسب برای همه» وجود نداشته باشد که در همه جا کار کند. ما سعی کردیم پیکربندی را انتخاب کنیم که حداقل برای اکثر بخش AoI بهینه باشد، و سپس نتایج را با پسزمینه متنی و الگوریتمهای پردازش تطبیقی بهبود دهیم.
7.2.2. مقایسه InSAR و LiDAR برای نظارت بر تغییر شکل
ارزیابی مهم دیگر، مقایسه InSAR و تکنیک نظارتی بسیار محبوب و پرکاربرد، تشخیص نور و محدوده، که به نام اسکن لیزری (LiDAR) نیز شناخته میشود، است. LiDAR و InSAR هر دو تکنیک های اندازه گیری فعال هستند. آنها هر دو پالس های امواج الکترومغناطیسی را ارسال می کنند و پژواک حاصل را برای به دست آوردن اطلاعات هدف ضبط می کنند. در حالی که هر دو تکنیک قادر به انجام یک کار هستند، LiDAR اغلب برای تولید مدل زمین دیجیتال (DTM) به کار می رود، و InSAR معمولاً برای تشخیص حرکت زمین استفاده می شود. این تفاوت در کاربردها از اصول اساسی این دو تکنیک ناشی می شود. InSAR حرکت سطح زمین را با اندازه گیری اختلاف فاز بین سیگنال های راداری متوالی بدست می آورد. حساسیت سیستم InSAR برای تشخیص حرکت زمین مستقل از برد و متناسب با طول موج سیگنال است، که معمولاً قادر به ارائه دقت محدوده میلی متری اندازه گیری است. با این حال، حساسیت آن در به دست آوردن ارتفاع زمین به طور معکوس با خط مبنا فضایی ماهواره، که معمولاً به دقت سطح متر ترجمه می شود، متناسب است.
سنسور LiDAR یک سیستم زمان پرواز است که مختصات سه بعدی اهداف را بر اساس اندازه گیری دقیق زمان سفر سیگنال لیزری جمع آوری می کند. LiDAR ممکن است بهترین انتخاب برای بازسازی سه بعدی باشد، با این حال، برای نظارت بر پروژه ها سخت تر است، زیرا بازسازی همان ابر نقطه ای در فضا عملا غیرممکن است. تشخیص تغییر LiDAR با ایجاد یک مدل سه بعدی از ابر نقطه با استفاده از یک شبکه مثلثی و سپس مقایسه شبکه ها به دست می آید. از این رو، دقت تشخیص تغییر به چگالی ابر نقطه ای بستگی دارد که وابسته به محدوده است. LiDAR مبتنی بر زمین به طور معمول می تواند به دقتی در حدود 1.5 سانتی متر تا حداکثر فواصل حدود 800 تا 1000 متر دست یابد [ 36 ].
این دو تکنیک در هنگام اندازهگیری تغییر شکلها با چالشهای مشابهی روبرو هستند، به شرح زیر [ 37 ]:
-
هندسه بهینه برای اندازه گیری در حالی که LiDAR و InSAR از هندسه های مختلف استفاده می کنند، آنها به هندسه بهینه برای اهداف خاص نیاز دارند. هندسه بد در InSAR منجر به یک اعوجاج هندسی در تصویر SAR می شود، در حالی که در LiDAR منجر به سیگنال برگشتی ناکافی برای اندازه گیری موفقیت آمیز می شود.
-
پردازش حجم عظیمی از داده ها و توسعه یک روش تجزیه و تحلیل تغییر شکل کاملاً خودکار. هر دو تکنیک نیاز به پردازش حجم عظیمی از داده ها دارند. مشکل استخراج اطلاعات مفید و ایجاد یک فرآیند خودکار موثر برای تصمیم گیری است.
-
حساسیت به پوشش زمین هر دو سیستم به طور متفاوتی با این مشکل برخورد می کنند. رادار باند ایکس به تکه های بزرگتری از زمین بدون مانع نیاز دارد و نمی تواند به سایبان درختان نفوذ کند. پرتو لیزر بسیار باریک LiDAR معمولاً در نفوذ به پوشش گیاهی مؤثرتر است، اما پردازش سیگنال گسترده هنوز مورد نیاز است.
هنگامی که برای اندازه گیری تغییر شکل اعمال می شود، InSAR مزایای زیر را نسبت به LiDAR ارائه می دهد، به شرح زیر:
-
مستقل از اکثر شرایط آب و هوایی؛
-
قابلیت اندازه گیری روز/شب؛
-
بدون نیاز به کار میدانی (هرچند این برای InSAR زمینی اعمال نمی شود).
-
زمانهای ثابت بازدید مجدد ماهواره، معمولاً هر 8 تا 11 روز.
-
پوشش منطقه وسیع در هر مکانی روی زمین. LiDAR ابرهای نقطهای را در یک منطقه نسبتاً کوچک فراهم میکند، در حالی که InSAR میتواند نقشهای کامل از تغییر شکلهای زمین با دقت برد میلیمتری تا سانتیمتری ارائه دهد. پوشش معمولی یک تصویر SAR در حدود 50 تا 100 کیلومتر مربع یا مستطیل است. این رویکرد امکان تجزیه و تحلیل تغییر شکل های ناحیه وسیع را فراهم می کند. علاوه بر این، با روش InSAR، تشخیص جابجاییها در مکانهایی که پیشبینی نشده است، امکانپذیر است، بر خلاف روشهای ژئودتیک که (به دلیل هزینهها) اندازهگیریها فقط در مکانهایی انجام میشود که مشکوک به تغییر شکل هستند. هنگام مقایسه هزینه در واحد سطح، InSAR می تواند در صورت نیاز به نظارت گسترده، گزینه مقرون به صرفه تری ارائه دهد.
-
دقت اندازه گیری بالا با پیکربندی صحیح، InSAR میتواند به دقت سطح میلیمتری برسد که به طور قابلتوجهی بهتر از سیستمهای LiDAR هوابرد و بیشتر اسکنرهای لیزری زمینی برد بلند و متوسط است. به طور قابل توجهی، دقت تکنیک InSAR مستقل از فاصله بین ماهواره SAR و هدف زمینی است.
-
دسترسی به داده های تاریخی، امکان تجزیه و تحلیل جابجایی های گذشته را فراهم می کند. این قابلیت با برخی از ماهواره های راداری در دسترس است.
از جمله محدودیتهای قابل توجه تکنیک InSAR فضایی برای اهداف نظارت، موارد زیر است:
-
پردازش داده های InSAR پیچیده تر از LiDAR است. اگرچه این فناوری نسبتاً توسعه یافته است و الگوریتمهای پردازش بسیار قوی هستند، به پرسنل مجرب و نرمافزار پیچیده برای پردازش و تفسیر صحیح دادهها نیاز دارد.
-
ابهام فاز سیگنال جابجایی های اندازه گیری شده معمولا مبهم هستند زیرا فاز همیشه بین 0 و 2 پیچیده می شود π. مشکل را می توان تا حدی با روش PSI حل کرد، اما فقط با فرضیات خاصی قابل حل است.
-
وضوح. سیستمهای ماهوارهای SAR دارای محدودیتهایی هستند، از جمله وضوح زمانی و مکانی کم و ناتوانی در نظارت در زمان واقعی. در حال حاضر، یکی از راههای غلبه بر این محدودیت استفاده از سیستم SAR زمینی است.
7.3. مرحله بعدی: ماهواره های بیشتر، هزینه های کمتر
در حال حاضر، گلوگاه نظارت InSAR محدودیت نظری سیستم InSAR نیست، بلکه مجموعه دادههای موجود با هزینه معقول است. به عنوان مثال، این مطالعه در نهایت به دلیل محدودیت بودجه، دادههای باند L با وضوح 3 متر را با خط پایه 14 روزه رد کرد. بر اساس ارزیابی از دادههای آرشیو شده، تقریباً مطمئن است که دادههای باند L ALOS-2 نتیجه بسیار بهتری را ارائه میدهند. برخی از محدودیتهای دیگر، مانند ابهام فاز سیگنال و وضوح، میتوانند با ماهوارههای عملیاتی بیشتر، خط پایه زمانی کوتاهتر و وضوح فضایی بالاتر (یعنی پهنای باند بالاتر یا حالت نورافکن) برطرف شوند.
مایه دلگرمی است که شاهد موفقیت سیستم Sentinel-1A/B باشیم و بایگانیهای بسیار غنی داده در سرتاسر جهان قبلاً برنامههای InSAR را تقویت کردهاند. با ورود به سال 2020، فرصت های خوبی هم از سوی سازمان های دولتی و هم از همکاری های تجاری وجود دارد. از طرف سازمانهای دولتی، ماهوارههای اصلی از جمله TerraSAR-X، COSMO-SkyMed، و RADARSAT همگی شاهد پرتاب نسلهای بعدی خود از جمله PAZ، ماهواره COSMO-SkyMed نسل دوم (CSG1) و RADARSAT Constellation Mission (RCM) بودهاند. . باند L ALOS-4 و NISAR قرار است به زودی پرتاب شوند. از جنبه تجاری، تعدادی از استارت آپ ها روی ریزماهواره ها کار کرده اند. هدف این صورت فلکی ریزماهواره ارائه تصاویری با فرکانس بازنگری بسیار بالا با هزینه بسیار کمتر است. هر دو Iceye از فنلاند و Capella Space از ایالات متحده با موفقیت ماهواره های آزمایشی خود را برای اثبات مفهوم پرتاب کردند. Iceye ارائه خدمات تجاری را آغاز کرده است و Capella Space در سال 2020 عملیات تجاری خود را آغاز خواهد کرد.
اگر قصد انجام مطالعه مشابهی را در چند سال آینده داشته باشیم، انتخاب های بیشتری از منابع داده، در دسترس بودن بیشتر داده ها، وضوح زمانی/مکانی بهتر و نتایج کلی بسیار بهتر را پیش بینی خواهیم کرد.
8. نتیجه گیری
در این مطالعه، ما سعی کردیم راه حل جامعی برای پروژه پایش شیب بزرگراه بررسی کنیم. دو مرحله برای مطالعه انجام شد. فاز اول مناسب ترین ماهواره و پیکربندی را برای یک پروژه نظارتی برنامه ریزی شده تعیین کرد. فاز دوم فرآیند MTInSAR را انجام داد و حرکت شیب در امتداد بزرگراه را بررسی کرد.
برای فاز اول، نقشه اعوجاج هندسی شبیهسازی شده، نقشه تشخیص تغییر تجمعی، نقشه شدت، تداخلنگارها و نقشههای انسجام از تمامی تصاویر تاریخی موجود تولید شد. با بازرسی محصول نهایی، هم ماهواره و هم پیکربندی که بهترین انسجام و کمترین اعوجاج هندسی را در AoI ما ایجاد میکرد، انتخاب شدند. بهترین نامزد برای پروژه مانیتورینگ مسیر نزولی ALOS-2 خواهد بود و نفر دوم COSMO با نزول 8 روزه و بازبینی مجدد است. ما در نهایت با در نظر گرفتن بودجه موجود از COSMO استفاده کردیم.
برای مرحله دوم، فرآیند MTInSAR انجام شد. در مجموع 52 تصویر COSMO باند ایکس که تقریباً یک سال و نیم طول میکشد برای تجزیه و تحلیل استفاده شد. کل منطقه پروژه به پنج ناحیه کوچکتر تقسیم شد و برای هر AOI کوچک، از روش PSI برای تخمین جابجایی و ارتفاع پراکندههای پایدار استفاده شد. نقاط PS با انسجام زمانی نسبتاً بالا از نزدیک مورد بررسی قرار گرفتند. مکانهایی که شواهد حرکت را نشان میدهند گزارش شد، و یک کار میدانی برای تفسیر و اعتبارسنجی انجام شد. در نهایت به نتایج زیر رسیدیم:
-
تداخل سنجی پراکنده پایدار می تواند برای نظارت بر تغییر شکل شیب استفاده شود. تجزیه و تحلیل داده های باند X فضابرد نشان می دهد که شیب های سنگ را می توان با دقت میلی متری نظارت کرد. اهداف منسجم در جاده ها و شیب های صخره ای شناسایی شدند. هیچ هدفی بر فراز مناطق پوشش گیاهی شناسایی نشد.
-
در طول دوره مطالعه هیچ جابجایی قابل توجهی بر روی دامنه های سنگی در راهرو I-77 مشاهده نشد. این نتایج با مشاهدات میدانی انجام شده توسط پرسنل تعمیر و نگهداری VDOT سازگار بود.
-
ثابت شده است که تشخیص جابجایی شیب خاک با استفاده از داده های باند X چالش برانگیز است. نظارت موثر بر شیب های خاک مستلزم استفاده از طول موج های راداری طولانی تر، مانند باند C یا باند L، یا نصب بازتابنده های گوشه ای است.
-
پایش شیب با استفاده از سنجش از دور ماهواره ای شامل بهینه سازی هندسه اکتسابی و طول موج سیگنال رادار است. برنامه ریزی پروژه همچنین به ورودی زمین شناسان محلی برای تمرکز بر مناطق بالقوه خطرناک نیاز دارد.
-
رویکرد “یک اندازه مناسب برای همه” ممکن است در هر مکان برای سناریوهای پیچیده به خوبی کار نکند. این هم برای سخت افزار (پیکربندی های ماهواره ای) و هم برای نرم افزار (الگوریتم ها) صدق می کند. نتیجه MTInSAR را می توان با اعمال چندین حسگر و الگوریتم های تطبیقی برای SoI های مختلف بهبود بخشید.











بدون دیدگاه