1. مقدمه
کاوش باستان شناسی با استفاده از رویکردهای ژئوفیزیکی در باستان شناسی برای افزایش درک علمی و دانش مناطق باستان شناسی و کشف بقایای بالقوه ضروری است [ 1 ، 2 ]. در حالی که مطالعه ویژگیهای پنهان تمرکز اصلی باستانشناسان با استفاده از روشهای حفاری [ 3 ، 4 ، 5 ، 6 ] بوده است. تکامل در مطالعات باستان شناسی دانشمندان، مهندسان و باستان شناسان اکنون می توانند از رویکردهای RS برای بازرسی/بررسی مناطق مورد علاقه استفاده کنند، بنابراین از فرآیند اغلب مخرب حفاری اجتناب می کنند [ 7 ،8 ]. این روشهای غیرتهاجمی به طور قابلتوجهی برای مکانهای باستانشناسی پایدارتر از کاوشهای سنتی هستند و باید رویکردهای ارجح باشند [ 9 ، 10 ].
تکنیکهای RS از جمله تشخیص نور و محدوده (LiDAR) و عکاسی هوایی را میتوان برای شناسایی توپوگرافیهای باستانشناسی به صورت خودکار و دستی به کار برد [ 11 ، 12 ، 13 ]. مدلهای دیجیتال مشتقشده از LiDAR و Photogrammetry در چندین پروژه باستانشناسی به کار گرفته شدهاند تا نشان دهند چگونه میتوان از رویکردهای RS برای شناسایی، تفسیر و ارزیابی ویژگیهای مکانهای باستانشناسی استفاده کرد [ 13 ، 14 ، 15 ، 16 ، 17 ]. به عنوان مثال، در [ 18]، مدلهای سطح دیجیتال (DSM) از دادههای LiDAR و مجموعه فوتوگرامتری لایکا (LPS) مشتق شدند و برای تولید تصاویر ارتو برای تشخیص ویژگی در Vaihingen، آلمان استفاده شدند. آنها دریافتند که تمایز ساختمان ها (به عنوان مثال، بلوک Vaihingen) در زمانی که هم LiDAR و هم فتوگرامتری اعمال می شود به جای استفاده از داده های LiDAR به تنهایی، آسان تر است. اسکن لیزری هوابرد (ALS) نیز پیشنهاد شد و برای ایجاد مدلهای دیجیتال زمین (DTMs) از قسمت جنوبی شیار شیطان (مسیر ماقبل تاریخ)، در جمهوری چک استفاده شد، که کوچکترین ناپیوستگیهای زمین را در سایت مورد مطالعه (به عنوان مثال، فرسایش) برجسته کرد. شیارها و آهنگ ها) [ 11 ]. در [ 19]، یک DEM با یک عکس ارتوموزائیک ایجاد شده از تصاویر وسایل نقلیه هوایی بدون سرنشین (UAV) RGB (قرمز، سبز و آبی) از محوطه دانشگاه (پردیس Sains Malaysia در مالزی) ترکیب شد تا مشخص شود آیا DSMهای ذوب شده نتایج متمایزی را برای طبقه بندی پوشش زمین ارائه می دهند یا خیر. یا نه. این مطالعه همچنین دقت طبقهبندی پوشش زمین را با استفاده از شبکههای عصبی کانولوشن بهبود میبخشد. تصاویر پهپادها به طور دقیق به علفزارها، ساختمان ها، درختان، جاده های آسفالت شده، بدنه های آبی، سایه ها و زمین های برهنه طبقه بندی می شوند [ 19 ]. اخیراً [ 12] نشان داد که تصاویر DSM و Google Earth مشتق شده از LiDAR قادر به شناسایی مکانهای پنهان (مانند قلعههای باستانی) برای نشان دادن پتانسیل ابزارهای RS برای نقشهبرداری یک سایت مطالعه دوره رومی در دره وادی الملاه در غفسا، تونس هستند. مجموعه ای از دشت های احاطه شده توسط کوه ها (حداکثر ارتفاع حدود 1480 متر). آنها دو مکان را در جنوب غربی تونس شناسایی کردند که مشکوک به قلعه های رومی هستند، که با یافتن قطعات آجر و چندین قطعه سفال در قلعه ها و یک مرز رومی در جنوب تونس با استفاده از داده های RS تایید شد. در نتیجه، چندین مطالعه نشان داد که RS یک ابزار قوی برای کاوش های باستان شناسی است.
علاوه بر این، چندین روش تجسم وجود دارد، مانند تصاویر شیبدار و تصاویر جنبهای که از مدلهای دیجیتالی به دست میآیند، که میتوانند برای تشخیص موفقیتآمیز ویژگیهای باستانشناسی استفاده شوند [ 1 ، 11 ، 14 ، 15 ، 16 ]. به طور خاص، تصاویر شیب تغییرات عمودی را در مدلهای ارتفاع به دست آمده از LiDAR DTM نشان میدهند، در حالی که تصاویر جنبه، جهت تغییرات عمودی را در مکانهای مورد مطالعه نشان میدهند [ 20 ]. در [ 20 ]، یک تپه، و احتمالاً یک حلقه پوسته جدید و تپه دیگری کشف شد. علاوه بر این، [ 6 ] از تجسم تپهای دادههای LiDAR با چگالی نقطهای 1 نقطه بر متر مربع استفاده کرد .و با موفقیت جزئیات توپوگرافی Barwhill (شمال دروازه ناوگان در اسکاتلند) را ارائه کرد و چندین بقایای باستان شناسی را شناسایی کرد، مانند ویژگی های خطی که نشان دهنده تخلیه آب قدیمی است و ویژگی دیگری که مربوط به جاده رومی است. با این حال، در برخی موارد به دلیل تأثیر مدل نورپردازی که باعث ایجاد اعوجاج و در نتیجه پنهان کردن برخی ویژگیهای باستانشناسی میشود، نمیتوان ویژگیهایی را از تصاویر سایه تپه استخراج کرد. به طور مشابه، در [ 20]، همچنین مشخص شد که نور در تصاویر سایه تپه میتواند توپوگرافیها را مبهم کند، بنابراین آنها نقشههای تصویری قرمز (RRIMs) را برای شناسایی و دیجیتالی کردن تپهها با استفاده از دادههای LiDAR ایجاد کردند. RRIM یکی دیگر از روشهای تجسم است و برای نمایش و تفسیر بناهای تاریخی در زمینهای مختلف، مانند سطح زمین، کف دریا، و ویژگیهای اجرام آسمانی مناسب است [ 14 ]. RRIM بر محدودیتها غلبه کرده است (مثلاً وابستگی به جهت نور، فیلتر کردن، و ضعف در مقیاسبندی) سایر روشهای تجسم، مانند hillshade. در [ 15]، روشهای تجسم مختلف تحت شرایط مختلف اعمال و ارزیابی شدند و آنها دریافتند که تکنیک RRIM در مقایسه با روشهای دیگر، مزیت تجسمی نسبتاً بزرگی را برای کاربر نهایی به ارمغان میآورد، زیرا میتواند با موفقیت بقایای ظریف باستانشناسی را آشکار کند. علاوه بر این، تکنیک های تجسم های مختلف (به عنوان مثال، سایه تپه، شیب، باز بودن مثبت) را می توان با استفاده از جعبه ابزار تجسم امداد (RVT) برای کشف و شناسایی ویژگی های مقیاس کوچک محاسبه کرد [ 16 ، 21 ].
بسیاری از مطالعات از فناوری های RS در رشته باستان شناسی و میراث فرهنگی استفاده کرده اند. برخی برای اولین بار بر کشف و ثبت مکانهای باستانی تمرکز کردند [ 7 ، 15 ، 17 ]. دیگران ویژگی های باستان شناسی شناخته شده را برجسته کردند [ 6 ، 11 ، 13]. این مطالعات تا حدی با تحقیقات ما مرتبط است، اگرچه برخی از آنها به ویژه مناطق بزرگتر را هدف قرار می دهند (به عنوان مثال، کشف سایت های جدید). بنابراین، فتوگرامتری مبتنی بر پهپاد و LiDAR این امکان را دارند که سهم بیشتری در نتایج مدیریت باستانشناسی داشته باشند و این روشها تشخیص ایمن و توصیف مناسب سوابق باستانشناسی را فراهم میکنند. هدف از این مطالعه نشان دادن یک گردش کار برای شناسایی و ثبت ویژگیهای باستانشناسی با استفاده از رویکردهای RS در مقیاس خوب (به عنوان مثال، ساختار از فوتوگرامتری Motion-Multi View Stereo (SfM-MVS) با دادههای پهپاد و دادههای LiDAR) و انجام مقایسههای انتقادی از توانایی آنها برای شناسایی ویژگی های باستان شناسی (بقایای احتمالی). تصاویر هوایی و پردازش داده های LiDAR، ابزار طبقه بندی،
2. مواد و روشها
2.1. منطقه مطالعه
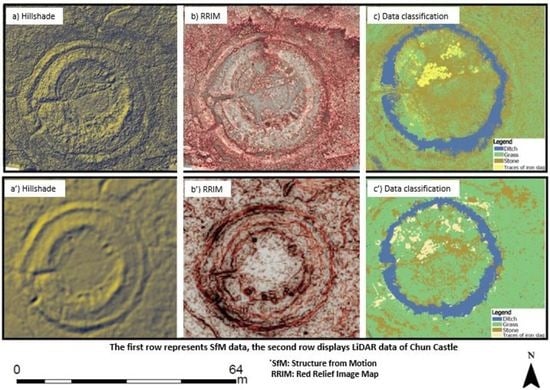
قلعه چون ( شکل 1 ) تپه ای از عصر آهن در نزدیکی پنزنس، در پنویت غربی، کورنوال، بریتانیا (50.1486 درجه شمالی، 5.6336 درجه غربی) در 215 متر بالاتر از Ordnance Datum Newlyn (ODN) [ 22 ، 23 ]25، تقریباً 00 سال ساخته شده است. پیش [ 23 ]. این شامل چندین ویژگی باستان شناسی است (به عنوان مثال، سنگ، دیوار، و سفال)، که حدود 2000 سال قدمت دارند [ 3 ، 24 ]. این قلعه دارای ساختمانی تقریباً دایرهای است که توسط دو دیوار سنگی حلقه شده و در جلوی هر دیوار خندقی دارد. کارهای حفاری در سالهای 1930 و 1926 برای کاوش در قلعه اجرا شد [ 3 ، 4]. در مطالعات اخیر آثاری از کلبه های مستطیل و یک حیاط داخلی متعلق به عصر آهن آشکار شد، اما این کلبه ها ظاهراً دیگر وجود ندارند. در سال 1930، چندین قطعه سفال (که زبری متوسط را با مخلوط کوارتز نشان می دهد) نیز یافت شد که 0.03 متر قطر و 0.01 متر ضخامت دارند [ 4 ]. علاوه بر این، یک کوره برای فرآوری مواد معدنی ساخته شده بر روی ساختارهای گرد در منطقه مورد علاقه (AOI) شناسایی شد. احتمالاً این سایت در ابتدا مکانی برای برگزاری مراسم و قبایل محلی بوده است [ 25 ]. بعدها، در قرن شانزدهم، کوره ای برای ذوب و تولید مواد معدنی و قلع در داخل قلعه ساخته شد [ 26 ، 27 ].]. سپس قلعه در قرن هجدهم برای ساختن خانه ها و سنگ فرش کردن جاده ها در پنزانس غارت شد [ 22 ، 23 ]. ویژگیهای باستانشناسی که قبلاً در ادبیات قبلی شناسایی شدهاند در جدول 1 خلاصه شدهاند .
2.2. داده های سنجش از راه دور
دو مجموعه داده RS در این مطالعه مورد ارزیابی قرار میگیرند تا مشخص شود کدام مجموعه دادهها برای شناسایی بناهای باستانشناسی پشتیبان مؤثرترین عملکرد را دارند: (i) DSMهای مشتق شده از دادههای توپوگرافی خام LiDAR و (ب) DSMهای تولید شده از فتوگرامتری SfM.
2.2.1. مجموعه داده LiDAR
داده های خام توپوگرافی LiDAR در طول جولای و آگوست 2013 با استفاده از اسکنر لیزری Optech ALTM 3100 EA برای پروژه Tellus South West ( www.tellusgb.ac.uk ) گرفته شد. سیستم موقعیت یاب جهانی Applanix (GPS) برای ایجاد 74 نقطه کنترل زمینی تصادفی (GCPs) توزیع شده در کورنوال و دوون برای ارجاع جغرافیایی محصول بررسی LiDAR [ 28 ] استفاده شد. مرجع مکانی داده های LiDAR OSGB 1936/British National Grid (EPSG: 27700) است. ابرهای نقطه LiDAR کالیبرهشده توسط Geomatics (آژانس محیطزیست) با استفاده از نرمافزار Terrascan به DSM پردازش شدند [ 28 ]]. در این مطالعه از DSM های LiDAR استفاده می شود زیرا داده های خام سایت مورد مطالعه در دسترس نیست. DSMهای LiDAR از پروژه مرکز اکولوژی و هیدرولوژی بریتانیا در جنوب غربی ( https://www.ceh.ac.uk ) گرفته شده و از (https://catalogue.ceh.ac.uk/documents/b81071f2-85b3) دانلود شده اند . -4e31-8506-cabe899f989a ) در وضوح فضایی 1 متر با دقت متوسط 0.25 متر [ 29]. این وضوح در این تحقیق کافی است زیرا اطلاعات بیشتری وجود ندارد که بتوان از داده های خام LiDAR که وضوح توپوگرافی کمتر از 1 متر است استخراج کرد. هنوز امکان شبکهبندی دادههای خام (در صورت در دسترس بودن) با وضوح بالاتر (مثلاً 0.5 متر) وجود دارد، اما در این مورد، الگوریتم پر کردن شکاف تنها انتخاب برای پیادهسازی این گزینه خواهد بود. علاوه بر این، چگالی نقطه موجود محدودیتی را برای مقدار اطلاعاتی که می توان از این داده ها استخراج کرد تعیین می کند. از این رو؛ افزایش وضوح فضایی این مجموعه داده خاص به طور بالقوه هیچ اطلاعات مفید اضافی را ارائه نمی دهد. این مجموعه داده در مطالعات دیگر [ 30 ، 31 ، 32 ] نیز مورد استفاده قرار گرفت و یافته های جالبی را ارائه داد. علاوه بر این، مراجع. [6 و 20 ] از دادههای LiDAR با چگالی نقطهای 1 نقطه بر متر مربع استفاده کردند و با موفقیت چندین بقایای باستانشناسی AOI را شناسایی کردند. علاوه بر دادههای LiDAR، مجموعه دادههای DSM دوم از تصاویر خام پهپاد با استفاده از روش SfM در وضوح فضایی 0.04 متر ایجاد شد.
2.2.2. مجموعه داده فتوگرامتری
جمع آوری داده ها
جمع آوری داده های مجموعه داده فتوگرامتری در قلعه چون در 6 ژوئن 2019 انجام شد. قبل از انجام بررسی هوایی، بررسی GCPs با استفاده از سیستم RTK- دیفرانسیل Leica GS08 انجام شد. در مجموع 15 نشانگر “تقاطع آهن” در سراسر سایت مطالعه به عنوان GCP مورد بررسی قرار گرفتند و با استفاده از GNSS دیفرانسیل به صورت فضایی قرار گرفتند. نشانگرهای صلیب آهنی در AOI برای اطمینان از موقعیت GCPs در اطراف مرزهای سایت مطالعه و در نزدیکی مرکز قلعه توزیع شدند [ 33]. نشانگرها باید عاری از علف/پوشش گیاهی باشند که ممکن است دید واضح از هوا را مسدود کند. یک ایستگاه مرجع محلی با استفاده از یک دوره مشاهده ایستا DGPS دو ساعته اندازه گیری شد. پس از پردازش پس، دقت مکانی ایستگاه مرجع محلی 0.02 متر افقی و 0.05 متر به صورت عمودی بود. سپس، 15 GCP به طور نسبی در AOI مستقر و مکان یابی شدند. این نقاط بعداً برای تراز مجدد ابرهای نقطه ای برای ارجاع جغرافیایی داده های بررسی هوایی مورد استفاده قرار گرفتند.
هدف از بررسی پهپاد بدست آوردن مجموعه ای از داده های فتوگرامتری برای تولید نقشه ارتوموزائیک و DSM برای قلعه چون است. ما از DJI Mavic 2 Pro Drone ( https://www.dji.com/uk/mavic-2 )، مجهز به دوربین دیجیتال Hasselblad (5472 × 3648 پیکسل) استفاده کردیم که دارای شاتر الکترونیکی چرخشی است ( جدول A1 در ضمیمه الف ). این پلت فرم حدودا وزن دارد. 907 گرم و کمتر از 1500 پوند قیمت دارد. در این مطالعه، پروازها در یک خط دید بصری در ارتفاع 80 متری بر فراز AOI با فاصله نمونه برداری زمینی 6.9 سانتی متر بر پیکسل (GSD) انجام شد. این ارتفاع (80 متر) انتخاب شد، زیرا ارتفاع پرواز مستقیماً بر GSD قابل دستیابی تأثیر می گذارد و در نتیجه، جزئیاتی را که می توان از تصاویر پهپاد شناسایی کرد تأثیر می گذارد [ 34 ,35 ، 36 ]. چندین مطالعه وجود دارد (به عنوان مثال، [ 35 ، 36 ، 37 ]) با ارتفاع پرواز بیشتر از 80 متر که نقشه های دانه ریز AOI ها را دریافت کردند. این ارتفاع برای به دست آوردن GSD کافی انتخاب شد که ما را قادر می سازد تا ویژگی های توپوگرافی سایت باستان شناسی را تفسیر و تشخیص دهیم ( بخش 3 ). تصاویر هوایی در این کار با نگه داشتن دوربین دیجیتال در فاصله کانونی ثابت 28 میلی متر گرفته شده است. حداقل همپوشانی و لایه جانبی 80٪ و سرعت شاتر 1/640 ثانیه بود، که برای کاهش تاری حرکت و به دست آوردن ویژگی های استخراج شده سازگارتر کافی بود [ 36 ، 37 ]]. سایت مطالعه با یک پرواز برنامه ریزی شده با استفاده از نرم افزار منبع باز Mission Planner ( https://planner.ardupilot.com/ ) بررسی شد. این نرم افزار به عنوان یک مکمل کنترل پویا برای تنظیم ماموریت های پروازی و نظارت بر وضعیت پهپاد در حین کار استفاده می شود. پروازهای هواپیماهای بدون سرنشین در چند ساعت بعد از ظهر خورشیدی (به عنوان مثال، 13:00) انجام شد به این معنا که شرایط روشنایی احتمالاً بر بازسازیهای فتوگرامتری تأثیر میگذارد [ 34 ، 35 ، 36 ]. این سکو به مدت 15 دقیقه بر فراز محل مطالعه پرواز کرد تا 161 تصویر هوایی ثبت شود. جزئیات پرواز در جدول 2 خلاصه شده است.
Orthomosaic و DSM Generation
پس از گرفتن داده از تصاویر پهپاد، مرحله پیش پردازش فتوگرامتری SfM اجرا شد. چندین برنامه کامپیوتری برای پردازش فتوگرامتری SfM مانند Pix4Dmapper، Recap و Metashape در دسترس هستند. در این تحقیق از نرم افزار Agisoft Metashape Professional (v.1.5) ( https://www.agisoft.com/ ) استفاده شد زیرا در تولید تا حدی ابرهای نقطه ای متراکم دقیق از تصاویر هوایی در مقایسه با سایر نرم افزارهای فتوگرامتری [ 33 ، 34 ]. گردش کار با تراز عکس شروع می شود که روش های SfM را برای جستجوی نقاط مشترک در تصاویر هوایی، تطبیق آنها و اجرای مثلث بندی ابرهای نقطه ای اعمال می کند [ 36 ، 38 ]]. سپس الگوریتم تنظیم بلوک بستهای برای اصلاح موقعیت دوربین برای تصاویر هوایی منفرد و بهبود بازسازیهای سه بعدی اجرا میشود [ 33 ، 34 ، 35 ]. ابر نقطه پراکنده حاصل برای ایجاد یک شبکه سه بعدی از سایت/صحنه اعمال می شود. سپس از نشانگرهای کنترل زمین برای ارجاع جغرافیایی مدل ها استفاده شد. به طور خاص، 15 نشانگر در Agisoft Metashape قرار داده شد. سپس، GCPها وارد شدند و به صورت دستی در تصاویر هوایی شناسایی شدند تا از موقعیت جغرافیایی با موقعیت مکانی عکسها اطمینان حاصل شود. سپس تکنیکهای stereopsis چند نمای برای ایجاد ابرهای نقطهای متراکم بر اساس موقعیتهای دوربین تنظیمشده، GCPs و تصاویر هوایی RGB استفاده شد [ 39]. تقریباً 12 میلیون (12,057,994) نقطه از این مرحله پردازش اولیه در این مجموعه داده سه بعدی ایجاد می شود. خروجی های مرحله پیش پردازش تصاویر هوایی یک مش بافت دار، یک نقشه ارتوموزائیک و DSM می باشد. این خروجی ها در ArcGIS Pro (نسخه 2.4) ( https://www.esri.com ) برای شناسایی هر گونه ویژگی باستان شناسی احتمالی تجزیه و تحلیل شدند.
2.3. روش های تجسم
اولین مرحله در مرحله پس از پردازش، ایجاد چهار تصویر شطرنجی تجسمی از هر مدل (یعنی LiDAR DSM و SfM-DSM) بود. روشهای تجسم میتوانند کمک اساسی برای شناسایی اطلاعات توپوگرافی بهدستآمده با رویکردهای RS بهعنوان مثال، LiDAR [ 2 ، 14 ] ارائه دهند. ترکیب و همپوشانی داده های شطرنجی تجسم در GIS جزء کلیدی در تفسیر و تعامل با محیط شبیه سازی شده در نظر گرفته می شود [ 40 ، 41 ]. این تصاویر شطرنجی تجسم عبارتند از: تصویر شیب، تصویر جنبه، نقشه برجسته سایه دار (تپهسایه)، و RRIM.
2.3.1. شیب و جنبه شطرنجی
شطرنجی شیب بر تغییرات ارتفاع در منظره تمرکز دارد. اکثر بسته های GIS یک همسایگی 3 در 3 را برای چندین عملیات شطرنجی (به عنوان مثال، شیب و جنبه) اعمال می کنند [ 42 ، 43 ]. شیب معمولاً با واحدهای درجه با استفاده از DSMهای اصلی به عنوان ورودی محاسبه می شود، به معادله (3) مراجعه کنید. برای توضیح بیشتر، جدول 3 مقادیر سلول (e) و هشت همسایه آن (از a تا i) را برای تعریف دلتاهای افقی و عمودی نشان می دهد [ 42 ]. تصویر شطرنجی شیب میتواند شیب سلولهای منفرد را در تصویر شطرنجی شناسایی کند. که در آن هر پیکسل بر اساس شیب زمین رنگ می شود [ 20 ]. با این حال، تصویر جنبه پیکسل ها را با توجه به جهت شیب رنگ می کند [ 11]. شایستگی استفاده از شطرنجی جنبه در این مطالعه، علاوه بر تصویر ارتوموزائیک، در امکان شناسایی ویژگی هایی است که قبلاً توسط مطالعات قبلی در داخل سایت مورد مطالعه شناسایی شده اند (به عنوان مثال، ورودی، خندق).
2.3.2. تپه شید رستر
شطرنجی سایه تپه یک تصویر برجسته سایه دار است که تغییرات ارتفاعی منظره را برجسته می کند [ 2 ، 30 ]]. پارامترهای روشنایی (آزیموت: 315، ارتفاع: 45، و ضریب Z: 1) در این مطالعه برای ایجاد تصویر برجسته سایهدار شبیهسازی شدهاند. آزیموت و ارتفاع، موقعیت نسبی خورشید را برای تولید مدلهای سه بعدی مشخص میکنند. آزیموت نشان دهنده مکان نسبی خورشید در امتداد افق است که در جهت عقربه های ساعت از شمال (0/360 درجه)، شرق، جنوب و غرب (270 درجه) اندازه گیری می شود. با این حال، پارامتر ارتفاع به زاویه ارتفاع خورشید در افق در محدوده بین 0 (زاویه ارتفاع در صفحه افقی قاب مرجع که منجر به ایجاد مدلهای سه بعدی با حداقل روشنایی میشود) و 90 درجه (بالای صفحه افقی که منجر به ایجاد مدلهای سه بعدی میشود) اشاره دارد. منجر به ایجاد مدل های سه بعدی با حداکثر روشنایی می شود). ضریب Z اندازه واحدهای ارتفاع (Z) را زمانی که از واحدهای افقی (X و Y) شطرنج ورودی متفاوت است، تغییر میدهد. در این مورد، واحدهای افقی و عمودی همه در یک واحد (متر) هستند، بنابراین ضریب Z روی 1 تنظیم شد. کاربرد این روش تجسم این است که به کاربر کمک می کند تا جزئیات توپوگرافی را درک و درک کند [1 ، 14 ]. با این وجود، یکی از نقاط ضعفی که میتوان در تصویر سایه تپه با آن مواجه شد، این است که روشنایی میتواند باعث تغییر شکلهایی شود که منجر به پنهانکردن ویژگیهای خاص زمین میشود [ 14 ، 42 ]. برای جلوگیری از این امر، RRIMها (معروف به نقشههای امدادی بدون سایه) برای به دست آوردن ویژگیهای توپوگرافی واضح AOI استفاده میشوند، زیرا آنها به طور مطلوب با سایر روشهای تجسم مقایسه میشوند [ 42 ، 44 ].
2.3.3. نقشه برداری تصویر قرمز رنگ (RRIM)
RRIM یک روش تجسم بر اساس داده های توپوگرافی چند لایه (یعنی باز بودن مثبت، باز بودن منفی و شیب توپوگرافی) است که از DSM ها محاسبه می شود [ 14 ]. باز بودن یک معیار زاویه ای از رابطه بین فاصله افقی و تسکین سطح است، نشان دهنده محفظه (منفی) و تسلط (مثبت) یک موقعیت چشم انداز است و برای تجسم جزئیات توپوگرافی [ 44 ] اعمال می شود. باز بودن مثبت به معنی تحدب مناظر مانند خط الراس و تاج است، در حالی که باز بودن منفی نشان دهنده تقعر مناظر مانند دره و خندق است [ 15 ، 42 ].]. پارامترهای خاصی مانند حد شعاعی و تعداد بخش ها برای ایجاد باز بودن توپوگرافی انتخاب شدند. حد شعاعی به ویژگی های چشم انداز، اندازه سلول و اندازه شبکه بستگی دارد. در این تحقیق، انواع محدودیتهای شعاعی (2 متر، 10 متر، 30 متر و 50 متر) برای شناسایی مناسبترین مقدار برای استفاده برای محاسبه شطرنجی باز بودن تفاضلی آزمایش میشوند. محدودیتهای شعاعی 10 متر انتخاب شدند، زیرا این تصویر شطرنجی نسبتاً دقیقتری را برای قلعه چون فراهم میکند. تعداد سکتورها روی 8 پیکربندی شده است که مقدار استانداردی است که برای تعیین تعداد آزیموت ها استفاده می شود [ 44]. دو روش در دسترس برای اجرای محاسبات باز بودن وجود دارد: روش بخش و روش چند مقیاسی. یکی از اشکالات اصلی روش چند مقیاسی این است که لایههای هرمی تولید میکند که پارامترهای باز بودن دقیقتری نسبت به آنهایی که میتوان از روش بخش ارائه کرد [ 44 ] ارائه میکند. به همین دلیل در این تحقیق از روش بخش برای اجرای محاسبه باز بودن استفاده شد. برای استخراج RRIMها، از یک رستر باز بودن دیفرانسیل (I) برای محاسبه پارامترهای باز بودن به دنبال رابطه (1) استفاده شد، که در آن I شطرنجی باز بودن دیفرانسیل است، Op ارزیابی باز بودن مثبت (که تقعر توپوگرافی را محاسبه میکند) و On است . ارزیابی باز بودن منفی است (که تحدب توپوگرافی را تخمین می زند) [14 ، 15 ].
RRIM یک روش بدون سایه است که به طور موثر ساختار ظریف داده های توپوگرافی سه بعدی را نشان می دهد. این روش امکان تجسم تصاویر شطرنجی سه بعدی با وضوح نسبتاً بالاتر را نسبت به سایر روش های تجسم (مانند سایه تپه) فراهم می کند. از این رو، برای طیف گسترده ای از داده های توپوگرافی، مانند LiDAR و فتوگرامتری مناسب است [ 11 ، 14 ]. بنابراین، RRIMها در این مطالعه با همپوشانی شطرنجی باز بودن دیفرانسیل با شطرنجی شیب تولید میشوند. سپس از مقادیر RRIM برای تولید یک نقشه ترکیبی استفاده میشود که تحدبها و تقعرها را با شطرنجی شیب توپوگرافی به رنگ قرمز نشان میدهد [ 20 ، 44 ]، جدول 4 را ببینید .
2.4. الگوریتم های طبقه بندی
2.4.1. طبقه بندی نظارت شده و بدون نظارت
در این کار، برخی از ویژگی های باستان شناسی به صورت دستی شناسایی می شوند در حالی که سایر ویژگی ها به صورت خودکار شناسایی می شوند. استفاده از تصاویر هوایی و موزاییک ها در تفسیر دستی ریشه دارد که در آن کاربر باید به صورت بصری به دنبال شناسایی اشیاء مورد علاقه باشد [ 20 ]]. چنین تجزیه و تحلیل دستی یک رویکرد سازنده برای تشخیص ویژگی است، اگرچه احتمالاً پتانسیل و کارایی تکنیک های RS را در مناطق بزرگتر محدود می کند (به عنوان مثال، <1 هکتار). در این تحقیق تشخیص دستی و دیجیتالی نمودن ویژگی های باستان شناسی بر اساس روش های تجسم است. روشهای دیجیتالی خودکار ویژگیها جایگزین روشهای استخراج دستی نشدهاند، زیرا استخراج دستی هنوز انعطافپذیری و سازگاری را برای اعمال انواع مختلف دادهها دارد. به طور خاص، بناها به صورت دستی از تصاویر شطرنجی تجسم در ترکیب با تصویر ارتوموزائیک که در آن پیکسلها تقریباً در جنبههای طیفی مشابه هستند، شناسایی میشوند. اشیاء باستان شناسی شناسایی شده با استفاده از نرم افزار ArcGIS Pro (v.2.4) به صورت چند ضلعی (مثلاً چاه قلعه) و چند خطی (مثلاً ورودی) دیجیتالی می شوند.https://www.esri.com ).
علاوه بر رویکرد دستی، روشهای طبقهبندی خودکار مانند ابزارهای کلاستر ISO و طبقهبندی نظارت شده، که ابزارهای ضروری برای استخراج اطلاعات باستانشناسی از دادههای RS را در نظر میگیرند، اعمال میشوند [ 12 ]. این روشهای طبقهبندی، طبقات زمین را به پیکسلها مشخص میکنند و احتمالاً با به حداقل رساندن زمانبر استخراج دستی ویژگیها، بهرهوری را افزایش میدهند [ 45 ، 46 ]. به طور کلی، طبقه بندی ISO جایی است که اشیا یا مناطق بسته به تجزیه و تحلیل تصویر شطرنجی بدون انتخاب کلاس های نمونه از پیش تعریف شده به کلاس ها اختصاص داده می شوند [ 11 ، 12 ، 47 ]]. کاربران میتوانند الگوریتم را برای گروهبندی پیکسلها در کلاسها تنظیم کنند و تعداد کلاسهای مورد نیاز را برای تخصیص اشیا مشخص کنند. در طبقهبندی نظارت شده، کاربران میتوانند پیکسلهای نمونه را در یک تصویر شطرنجی برای تولید کلاسهای خاص مشخص کنند و از آنها به عنوان کلاسهای مرجع برای طبقهبندی همه پیکسلها در شطرنجی استفاده کنند [ 46 ، 48 ]. خوشه ISO و ابزارهای طبقه بندی نظارت شده در چندین مطالعه باستان شناسی استفاده می شود (مانند [ 12 , 15 , 48 )]) برای شناسایی ویژگی های باستان شناسی. ابزار طبقه بندی بدون نظارت نیز به دلایل مختلف در این برنامه باستان شناسی به کار گرفته شد: طبقات لازم نیست از قبل مشخص شوند، طبقات ناشناخته ممکن است آشکار شوند، و به طور کلی، در مقایسه با طبقه بندی نظارت شده، به حداقل مقدار ورودی نیاز دارد.
علیرغم خروجی های سودمندی که می توان از روش خوشه ISO به دست آورد، در این تحقیق از طبقه بندی های نظارت شده برای توسعه تحلیل نتایج نهایی استفاده شد. طیف وسیعی از الگوریتمها در طبقهبندی نظارت شده در دسترس هستند. به عنوان مثال، ماشینهای بردار پشتیبانی (SVM)، حداکثر احتمال (ML) و شبکههای عصبی (NN). ML الگوریتم پارامتری استاندارد است و فرض میکند که دادهها برای هر کلاس در یک رستر معمولاً توزیع میشوند [ 49 ، 50 ]. الگوریتم NN از لایه های کانولوشن برای طبقه بندی یک شطرنجی استفاده می کند که رویه برچسب گذاری را بهبود می بخشد، جایی که داده های منظره را می توان در سطوح مختلف استخراج کرد (به عنوان مثال، سطح شی، سطح پیکسل، و سطح وصله) [ 19 ]]. این الگوریتم ها را می توان با استفاده از بسته های نرم افزاری مختلف مانند Erdas Imagine، موتور Google Earth و ArcGIS برای دستیابی به استخراج خودکار زمین اعمال کرد. مشخص کردن دادههای آموزشی تا حدی مهمتر از انتخاب یک روش طبقهبندی خاص برای به دست آوردن دقت طبقهبندی نسبتاً بالاتر از تصاویر شطرنجی طبقهبندیشده است [ 51 ]. با این حال، چندین مطالعه (به عنوان مثال، [ 49 ، 52 ، 53]) دریافتند که SVM در مقایسه با سایر طبقهبندیکنندهها (به عنوان مثال، الگوریتم ML) بهتر عمل میکند و احتمالاً خطاهای طبقهبندی اطلاعات پوشش زمین را کاهش میدهد. بنابراین، الگوریتم SVM در این کار برای استخراج ویژگیهای باستانشناسی از دادههای RS در ArcGIS Pro استفاده شد. به طور خاص، در طبقه بندی نظارت شده، طبقه بندی کننده SVM برای اختصاص پیکسل ها به چهار کلاس مختلف (خندق، سنگ، سرباره آهن، و چمن) با استفاده از نمونه های آموزشی آموزش داده شد. داده های آموزشی برای دسته بندی کلاس های فردی با رسم چند ضلعی در اطراف اشیاء در تصاویر شطرنجی (به عنوان مثال، تصویر ارتوموزائیک) با استفاده از ابزار مدیریت نمونه های آموزشی ایجاد می شود. این برای ارائه دادههای مربوط به اندازه و تعداد نمونهها و همچنین برای افزایش دقت کلی فرآیند طبقهبندی استفاده شد. با این وجود، خروجی های طبقه بندی شده تولید شده توسط الگوریتم SVM می تواند حاوی نویز تصادفی خاصی باشد. برای بهبود نتایج طبقه بندی، یک روش پس از طبقه بندی انجام شد. به طور خاص، الگوریتمهای مختلفی برای حذف نویز و تغییر پیکسلهای طبقهبندیشده اشتباه به کلاس درست در دسترس هستند. در این مطالعه، ابزار طبقهبندی مجدد ArcGIS Pro برای ویرایش اشیاء/ویژگیهای خاص و رسیدگی به خطاهای خروجیهای طبقهبندیشده استفاده شد.
2.4.2. اعتبار سنجی داده ها
ابزارهای ارزیابی دقت برای تخمین و ارزیابی صحت (یعنی درجه صحت) نتایج طبقه بندی شده به کار گرفته شد. این تکنیک برای ارزیابی داده های به دست آمده از منابع RS مهم است و یک جزء حیاتی برای طیف وسیعی از مطالعات از جمله پروژه های تحقیقاتی باستان شناسی [ 15 ، 18 ، 19 ، 54 ] در نظر گرفته می شود. دقیقترین ارزیابی از ارزیابی اعتبارسنجی ماتریس خطا/ سردرگمی برای توصیف دقت فرآیند طبقهبندی اعمال شده [ 55 ، 56 ، 57 ، 58 ، 59 به دست آمد.]. این ماتریس برای گزارش کامل از دقت کلی، دقت کاربر، دقت تولید کننده و کاپا استفاده می شود [ 47 ، 59 ]. با استفاده از ابزارهای پردازش جغرافیایی، یک رویکرد نمونهگیری تصادفی طبقهبندی شده بر اساس نقشه طبقهبندیشده برای ایجاد مجموعهای از نقاط (۵۰۰ امتیاز) برای تضمین مشخصهبندی مناسب همه کلاسها اعمال میشود. سپس، این نقاط ارزیابی شده با استفاده از تصاویر Google Earth (دادههای مرجع) اعتبارسنجی میشوند تا امتیازهای فردی به کلاسهای واقعی آنها اختصاص داده شود ( شکل 2 ). سپس این نقاط در جداول جمع می شوند تا کلاس واقعی برای نقاط منفرد را با شطرنجی طبقه بندی آنها مقایسه کنند. با روش ماتریس سردرگمی، دقت و مقادیر کاپا از 0 تا 1 نشان داده می شوند، که در آن عدد 1 نشان دهنده درصد دقت 100٪ است [ 58 ]، 60 ]. کاپا توافق بین مقادیر حقیقت و مقادیر طبقه بندی شده را محاسبه می کند. معادلات زیر و جدول 5 نشان می دهد که چگونه فرآیند اعتبار سنجی در این تحقیق پیاده سازی شده است [ 54 ، 57 ]. بنابراین، یک رویکرد تفسیری از دادههای فتوگرامتری SfM-MVS و LiDAR با استفاده از روشهای تجسم و رویکردهای طبقهبندی خودکار برای شناسایی ویژگیهای باستانشناسی در سایت مطالعه قلعه چون و روشن کردن یافتههای باستانشناسی که متعلق به عصر آهن و دوره روم بعدی است، ارائه شد.
که در آن Y ii مقداری است که به درستی متعلق به کلاس (i) طبقه بندی شده است، N مجموع داده های طبقه بندی شده (پیش بینی شده) در مقایسه با داده های واقعی، x i مجموع داده های طبقه بندی شده متعلق به کلاس های جداگانه (کلاس i) است. x i ‘ مجموع داده های واقعی متعلق به کلاس های منفرد (کلاس i) است و X ii اعداد مورب است که به درستی با توجه به داده های واقعی طبقه بندی شده اند.
3. نتایج
3.1. نتایج تجزیه و تحلیل تفسیر
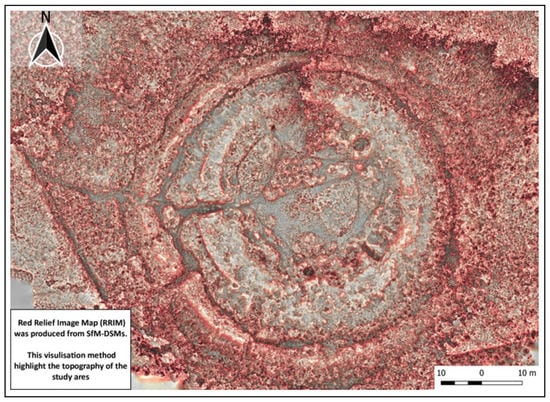
ابرهای نقطه ای که با استفاده از پردازش تصویر مبتنی بر هواپیماهای بدون سرنشین SfM-MVS به دست می آیند، نمایش مدل سه بعدی واقع گرایانه از قلعه چون را ایجاد می کنند ( شکل 3 ). بعدها، زمانی که تصاویر شطرنجی بصری تولید و تفسیر شدند، مشخص شد که شطرنجی شیب مرز ورودی را نشان میدهد و بر طرح کلی ویژگیهای باستانشناسی در مقایسه با DSM اصلی تأکید میکند. با این حال، شطرنجی سایه تپه طرح کلی واضح تری از منطقه مورد استفاده برای نمایش فرآوری مواد معدنی ارائه می دهد ( شکل 4). ویژگی های توپوگرافی سایت مورد مطالعه نیز از طریق RRIM ها شناسایی می شود. RRIMها در این مطالعه نماهای کمتر تحریف شده و واضحتری نسبت به سایر تصاویر شطرنجی (شیب، جنبه و تصاویر شطرنجی سایه تپه) ارائه میدهند و ویژگیهای توپوگرافی (مانند ورودی قلعه، خندق، بناهای مدور و باریکتر) را شناسایی میکنند. این پیامدها اطلاعات حیاتی و پتانسیل های تجسم را برای تفسیر ویژگی های شناسایی شده ارائه می دهند ( شکل 5 ). بر اساس این شطرنجهای بصری، و تصویر ارتوموزائیک به دست آمده از دادههای MVS-SfM، ویژگیهای باستانشناسی زیر به صورت بصری تفسیر شدهاند: یک منطقه ممکن برای پردازش مواد معدنی (163.63 متر مربع ) ، خندقها (خارجی: 5562.51 متر مربع ؛ داخلی: 3783.63 متر 2یک ویژگی خطی (A: 34.21 متر)، و سه شکل دایره ای (I’: 2.28 m2 ؛ II : 5.41 m2 ؛ III : 1.56 m2 ). علاوه بر این، شش بقایای احتمالی از سازهها (یعنی خانههای دایرهای احتمالی یا آثار اتاقک) که از دیوارهای ساخته شده از تیرهای سنگی تشکیل شدهاند نیز در این مطالعه دیجیتالی شدهاند. اندازه این آثار خطی عبارتند از: [Chamber (I) 11.74 m; اتاق (II) 20.31 متر; اتاق (III) 9.49 متر; اتاق (IV) 6.35 متر; اتاق (V) 5.59 متر; اتاق (VI) 10.87 متر]. اندازه این ویژگی های باستان شناسی نسبت به وضوح فضایی داده ها است ( شکل 6 ).
علاوه بر داده های SfM، LiDAR-DSM ها نیز مورد بررسی و تفسیر بصری قرار می گیرند. بناهای باستان شناسی (به عنوان مثال، مرزها، خندق، و ورودی قلعه) بر اساس تصاویر شطرنجی بصری تولید شده از مجموعه داده های LiDAR شناسایی می شوند ( شکل 6 و جدول 6 و جدول 7 ). این بناها عبارتند از: خندق [خارجی: 5524.21 متر مربع ; داخلی: 3747.06 متر مربع ] ، بناهای خطی [Polyline (I) 38.47 m; چند خط (II) 56.64 متر; چند خط (III) 33.33 متر] و شش شکل دایره ای [شکل دایره ای (I) 3.50 متر مربع ؛ شکل دایره ای (II) 5.97 متر مربع ، شکل دایره ای (III) 2.46 متر مربع ، شکل دایره ای (IV) 4.06 متر مربع، دایره شکل (V) 5.06 متر مربع ] . طبق دانش ما، این ویژگی های باستان شناسی ابتدا با استفاده از رویکردهای RS شناسایی و دیجیتالی شدند ( جدول 6 ، جدول 7 ، و جدول A2 در ضمیمه A ).
علاوه بر تجزیه و تحلیل تشخیص دستی، ابزارهای تشخیص خودکار (به عنوان مثال، الگوریتم ISODATA) برای ایجاد یک طبقه بندی بدون نظارت و تجزیه و تحلیل طبقه بندی نظارت شده برای شناسایی ویژگی های باستان شناسی استفاده شد. نتایج حاصل از طبقه بندی های نظارت شده ( شکل 7 ) مشابه نتایج بدست آمده از روش کلاستر ISO بود ( شکل A2 در پیوست A).). سنگ های تصادفی داخل قلعه پس از روش های تجسم مبتنی بر تفسیر به طور خودکار شناسایی و نقشه برداری می شوند. برخی از این سنگها بقایای کلبههایی هستند که بین عصر آهن و دوره روم ساخته شدهاند. علاوه بر این، خندق قلعه و شکل مثلثی (میدان فرآوری مواد معدنی) نیز در این مطالعه به طور خودکار شناسایی و دیجیتالی می شود. بخشی در داخل قلعه وجود دارد که هنوز آثاری از سرباره آهن و قلع دارد. از این رو این بخش به طور خودکار با استفاده از الگوریتم های طبقه بندی شناسایی و دیجیتالی شد. بنابراین، خندقها، میدان معدنی، سنگهای تصادفی، آثار سرباره آهن و چمن به طور خودکار با استفاده از این رویکردها دیجیتالی شدند.
3.2. نتایج اعتبار سنجی
در این تحقیق، نتایج حاصل از طبقهبندی بر اساس تحلیل ماتریس سردرگمی اعتبارسنجی میشود. نتایج به دست آمده از استفاده از تحلیل اعتبارسنجی ( شکل 8 ) نشان میدهد که نتایج اعتبارسنجی دادههای SfM نسبتاً دقیقتر از نتایج تولید شده از مجموعه دادههای LiDAR است، اگرچه همان الگوریتم نظارتشده (یعنی SVM) اعمال شد و تعداد یکسانی هدفگذاری شده بود. کلاسها برای نقشههای LiDAR و برگرفته از فتوگرامتری (نقشههای طبقهبندی) یک چشمانداز استفاده شد. نمونههای آموزشی نیز یکی از عواملی هستند که بر دقت طبقهبندی تأثیر میگذارند [ 53]، به عنوان تعداد کل نمونه های آموزشی نشان دهنده یک طبقه خاص (به عنوان مثال، سنگ). در نتیجه مکان یابی این نمونه ها باید بر اساس نقشه های نسبتاً با وضوح بالا باشد تا دقت طبقه بندی بالاتری به دست آید. این بدان معنی است که نتایج اعتبار سنجی نیز با وضوح فضایی نقشه طبقه بندی همبستگی دارد [ 53]. بنابراین، ارزیابی دقت طبقهبندی نظارت شده کلی از نقشههای وضوح فضایی بالاتر بهره میبرد. در این مطالعه، وضوح فضایی مجموعه داده فتوگرامتری بالاتر از مجموعه داده LiDAR است، که نتایج اعتبارسنجی (دقت کاربر، دقت تولیدکننده، و تحلیل کاپا) دادههای SfM را توضیح میدهد که نسبتاً بالاتر از دادههای تحویلشده از LiDAR توپوگرافی است. داده ها. علاوه بر این، اندازهگیریهای کاپا نقشههای طبقهبندی برگرفته از LiDAR و فتوگرامتری به ترتیب 72.7% و 77.8% بود. بر اساس دقت کاربر ( جدول A3 و جدول A4 در پیوست Aشناسایی و دیجیتالی کردن گودال ها (خارجی و داخلی) در AOI از هر دو مجموعه داده، در مقایسه با سایر ویژگی ها به بالاترین سطح دقت دست می یابد. علاوه بر این، 90٪ از ویژگی های شناسایی شده از میدان نیز در هر دو مجموعه داده فتوگرامتری و LiDAR شناسایی و دیجیتالی می شوند. شناسایی سنگ ها به ترتیب 73% و 85% انطباق بین داده های نقشه برداری شده یعنی روش های LiDAR و SfM و داده های زمینی (داده های مرجع) بدست آورد. انتظار می رود برخی از این سنگ ها بقایای کلبه ها/خانه هایی باشند که به عصر آهن و دوره رومی مربوط می شوند. علاوه بر این، فرآیند طبقهبندی SVM با موفقیت آثاری از سرباره آهن را شناسایی و نقشهبرداری کرد. با این حال، 85٪ و 74٪ از سنگ های نقشه برداری شده تایید شد که از مجموعه داده های SfM و LiDAR در مقایسه با یک نقشه مرجع شناسایی شده اند ( شکل 2). حداقل دقت ارائه شده از تجزیه و تحلیل طبقه بندی نقشه به ترتیب 74.3٪ و 73.3٪ از مجموعه داده های SfM و LiDAR بود. این روال ارزیابی نیز در مطالعه قبلی [ 49 ] اتخاذ شد.
4. بحث
مطالعات [ 3 ، 4 ] برای اولین بار با اجرای روش های کاوش، آثار باستانی را در قلعه چون شناسایی کرد. کار تا به امروز بر استفاده از رویکردهای خاص برای شناسایی مناظر باستان شناسی متمرکز شده است (به عنوان مثال، [ 10 ، 11 ، 18 ، 20 ، 59]) و هنوز بر انجام مقایسههای انتقادی روشهای غیرتهاجمی مختلف (یعنی RS) برای شناسایی ساختارهای باستانشناسی تمرکز نکرده است. این تحقیق روشهای تفسیر و تحلیل خاصی را نشان میدهد که بر روی محصولات مشتقشده از دو رویکرد RS (یعنی مجموعهدادههای LiDAR و UAV-SfM) به کار گرفته شد و تفاوتها در قابلیتهای آنها برای شناسایی ویژگیهای باستانشناسی جدید (آثار بالقوه) در سایت مورد مطالعه را برجسته میکند ( جدول). 6 و جدول 7 ).
قلعه چون در وضعیتی بسیار ویران است. شناسایی اشیاء باستانشناسی از دادههای RS به دلیل تعداد سنگهای سست که محل را پوشاندهاند، اغلب چالش برانگیز بود. در این مطالعه، روش های مختلف تجسم استفاده می شود. ترکیب ارائه شده از DSM، شطرنجی شیب و RRIM تصاویر شطرنجی نسبتاً دقیقتر، کمتر تحریفشده و واضحتری را نسبت به سایر روشهای تجسم (به عنوان مثال، سایه تپه) ارائه میدهد، که امکان استخراج اطلاعات بیشتر در مورد چشمانداز باستانشناسی را فراهم میکند ( شکل 6 ). با استفاده از روشهای غیرمخرب، یافتههای جدیدی در این سایت ارائه شده است که شامل آثار احتمالی کلبه/خانه، بناهای تاریخی خطی و سازههای مدور میشود. در [ 27]، بقایای باستان شناسی احتمالی مانند چاه قلعه (یکی از سازه های مدور کشف شده در این اثر)، برخی سفال ها، کلبه ها و یک کوره تنها با استفاده از روش های کاوش شناسایی و تفسیر شدند. کوره ای در قلعه ( شکل 9 )، حاوی آثاری از سرباره آهن و قلع، نشان می دهد که قلعه به مکانی برای اختلاط، ذوب و تولید مواد معدنی در قرن 16 تبدیل شد [ 3 ]. علاوه بر این، و بر اساس کاوشهای [ 4 ]، در حیاط داخلی کلبههایی متعلق به عصر آهن وجود داشت که دیگر وجود ندارند. این ممکن است به دلیل غارتی باشد که در قرن هجدهم برای ساخت خانه ها و سنگفرش جاده ها در پنزانس رخ داد.
علاوه بر این در این مطالعه، تصویر شطرنجی RRIM و سایه تپهای که از SfM-DSMs به دست آمده است، برخی بقایای ساختمانی احتمالی از خانهها/اتاقهای گرد را نشان میدهد و این بقایا تفسیر و دیجیتالی شدند ( شکل 6 و شکل A1 در پیوست A ). کلبه های مدور، به طور کلی، شکل معمولی قلعه های عصر آهن هستند و در بیشتر قلعه های عصر آهن آشکار شده اند [ 4 ]. شش اثر “وجود بالقوه” کلبه های باستان شناسی در این مطالعه یافت می شود. برخی از آنها توسط ادبیات قبلی آشکار شده اند ( شکل 9 )، همانطور که در بخش 2 نشان داده شده است. علاوه بر این، چاه قلعه ای وجود داشت که برای تأمین آب مورد استفاده قرار می گرفت [ 27]. به طور کلی چاه ها عناصر ارزشمندی در قلعه هستند و گاهی اوقات، قلعه ها بیش از یک چاه داشتند [ 61 ]. Cartwright [ 61 ] همچنین بیان می کند که حدود 80٪ از قلعه ها با یک چاه و 20٪ دارای دو یا چند چاه بودند. در این تحقیق، سه ویژگی دایرهای شناسایی شده است که یکی از این ویژگیها به دنبال موقعیت مکانی آن به عنوان چاه قلعه بر اساس شناسایی قبلی در مطالعات [ 3 ، 27 ] شناسایی شد.
در این کار، ویژگیهای باستانشناسی در منظرهای با مقیاس خوب از مجموعه دادههای RS شناسایی، کمیسازی و دیجیتالی شدهاند. چندین ویژگی وجود دارد که توسط فتوگرامتری SfM-MVS با دادههای پهپاد شناسایی شدهاند، اما توسط LiDAR شناسایی نشدهاند (و بالعکس)، اگرچه همان روشهای پردازش و تجزیه و تحلیل در هر دو مجموعه داده پیادهسازی شده است. این به دلیل تفاوت در وضوح فضایی بین دو مجموعه داده است. دلیل آن احتمالاً وضوح مکانی داده های SfM است که نسبتاً بالاتر از وضوح DSM های LiDAR برای این سایت خاص است. در این مطالعه، وضوح مکانی دادههای LiDAR 1 متر بود، اما ممکن است امکان شبکهبندی دادههای خام (در صورت در دسترس بودن) با وضوح بالاتر (مثلاً 0.5 متر) وجود داشته باشد. که محدودیتی را برای مقدار اطلاعات استخراج شده از این مجموعه داده تعیین می کند. این بدان معناست که الگوریتمها با پر کردن شکاف دادههای خام پیادهسازی میشوند. در نتیجه، افزایش وضوح در این مورد خاص، به طور بالقوه اطلاعات مفیدتری در مورد سایت مطالعه ارائه نخواهد کرد. علاوه بر این، دادههای RS در تاریخهای مختلف بهدست آمدند، دادههای LiDAR در طی ژوئیه و آگوست 2013 جمعآوری شد و عکسبرداری هوایی در ژوئن 2019، سایت مورد مطالعه، تا حدی، در آن دوره (2013-2019) تغییری نکرد. عوامل متعددی وجود دارد که به طور مستقیم یا غیرمستقیم بر ویژگی های توپوگرافی تأثیر می گذارد و باعث تغییرات در یک منطقه خاص می شود، مانند آسیب های زیست محیطی (مانند سیل، زلزله و آتش سوزی) و فعالیت های انسانی (مانند خرابکاری، جنگ، توسعه و حفاری). این بدان معناست که الگوریتمها با پر کردن شکاف دادههای خام پیادهسازی میشوند. در نتیجه، افزایش وضوح در این مورد خاص، به طور بالقوه اطلاعات مفیدتری در مورد سایت مطالعه ارائه نخواهد کرد. علاوه بر این، دادههای RS در تاریخهای مختلف بهدست آمدند، دادههای LiDAR در طی ژوئیه و آگوست 2013 جمعآوری شد و عکسبرداری هوایی در ژوئن 2019، سایت مورد مطالعه، تا حدی، در آن دوره (2013-2019) تغییری نکرد. عوامل متعددی وجود دارد که به طور مستقیم یا غیرمستقیم بر ویژگی های توپوگرافی تأثیر می گذارد و باعث تغییرات در یک منطقه خاص می شود، مانند آسیب های زیست محیطی (مانند سیل، زلزله و آتش سوزی) و فعالیت های انسانی (مانند خرابکاری، جنگ، توسعه و حفاری). این بدان معناست که الگوریتمها با پر کردن شکاف دادههای خام پیادهسازی میشوند. در نتیجه، افزایش وضوح در این مورد خاص، به طور بالقوه اطلاعات مفیدتری در مورد سایت مطالعه ارائه نخواهد کرد. علاوه بر این، دادههای RS در تاریخهای مختلف بهدست آمدند، دادههای LiDAR در طی ژوئیه و آگوست 2013 جمعآوری شد و عکسبرداری هوایی در ژوئن 2019، سایت مورد مطالعه، تا حدی، در آن دوره (2013-2019) تغییری نکرد. عوامل متعددی وجود دارد که به طور مستقیم یا غیرمستقیم بر ویژگی های توپوگرافی تأثیر می گذارد و باعث تغییرات در یک منطقه خاص می شود، مانند آسیب های زیست محیطی (مانند سیل، زلزله و آتش سوزی) و فعالیت های انسانی (مانند خرابکاری، جنگ، توسعه و حفاری). علاوه بر این، دادههای RS در تاریخهای مختلف بهدست آمدند، دادههای LiDAR در طی ژوئیه و آگوست 2013 جمعآوری شد و عکسبرداری هوایی در ژوئن 2019، سایت مورد مطالعه، تا حدی، در آن دوره (2013-2019) تغییری نکرد. عوامل متعددی وجود دارد که به طور مستقیم یا غیرمستقیم بر ویژگی های توپوگرافی تأثیر می گذارد و باعث تغییرات در یک منطقه خاص می شود، مانند آسیب های زیست محیطی (مانند سیل، زلزله و آتش سوزی) و فعالیت های انسانی (مانند خرابکاری، جنگ، توسعه و حفاری). علاوه بر این، دادههای RS در تاریخهای مختلف بهدست آمدند، دادههای LiDAR در طی ژوئیه و آگوست 2013 جمعآوری شد و عکسبرداری هوایی در ژوئن 2019، سایت مورد مطالعه، تا حدی، در آن دوره (2013-2019) تغییری نکرد. عوامل متعددی وجود دارد که به طور مستقیم یا غیرمستقیم بر ویژگی های توپوگرافی تأثیر می گذارد و باعث تغییرات در یک منطقه خاص می شود، مانند آسیب های زیست محیطی (مانند سیل، زلزله و آتش سوزی) و فعالیت های انسانی (مانند خرابکاری، جنگ، توسعه و حفاری).62 ]. سایت مورد مطالعه در معرض این عوامل و ابزارهای مخرب به ویژه بین سال های 2013 و 2019 قرار نگرفته است [ 61 ]]، بنابراین خود منطقه باستان شناسی در آن دوره تغییری نکرده است. با این حال، به دلیل تنظیمات و شرایط مختلف (به عنوان مثال، دوربینها، حسگرها و وضوح) جمعآوری هر مجموعه داده، احتمالاً ویژگیهای باستانشناسی مختلفی از هر دو رویکرد به دست میآید. بر این اساس، درک ما توسط این چشمانداز باستانشناسی خاص که متعلق به عصر آهن و دوره روم است، ارتقا مییابد. کلبه های احتمالی تازه کشف شده و اشکال دایره ای در قلعه به پاسخ به یک سوال باستان شناسی در مورد چگونگی استفاده از رویکردهای روش شناختی مختلف (به عنوان مثال، روش های تجسم و الگوریتم های طبقه بندی) برای تشخیص مناظر باستان شناسی کمک کردند. از این رو،
5. نتیجه گیری ها
در این مقاله، یک روال غیر مخرب برای شناسایی سازههای باستانشناسی احتمالی در محوطه قلعه چون با استفاده از روشهای فتوگرامتری LiDAR و UAV ارائه شد. فنآوریهای RS به ما این امکان را میدهد که محاسن سایت مطالعه باستانشناسی را تأیید و درک کنیم. برخی از ویژگی ها بر اساس روش های تجسم (به عنوان مثال، RRIMs) اتخاذ شده شناسایی و به صورت دستی دیجیتالی شدند. این روش ها منجر به شناسایی قابل اعتماد چندین بنای بالقوه کلبه در قلعه شد. الگوریتمهای طبقهبندی کلاستر ISO و SVM برای شناسایی خودکار تمام اشیاء باستانشناسی در سایت استفاده شدند. استفاده از روشهای مختلف تجسم و ابزارهای طبقهبندی در یک محوطه باستانشناسی، روشی مناسب برای شناسایی ویژگیهای پنهان است. الگوریتمهایی که بهکار گرفته شدند، امکان شناسایی پیشرفتهتر ساختارهای مشکوک مختلف (مثلاً خانه گرد) را فراهم کردند. نتایج تجزیه و تحلیل جغرافیایی به ما این امکان را می دهد که (1) اشیاء باستان شناسی جدید را شناسایی و دیجیتالی کنیم، (2) شکل قلعه را نقشه برداری کنیم، و (3) آثار ناشناخته (خطوط، دایره ها) را در AOI پیدا کنیم. دادههای فتوگرامتری SfM به شناسایی بناهای تاریخی پنهان در چشمانداز باستانشناسی که دادههای LiDAR سطوح نسبتاً پایینتری از جزئیات را ارائه میکردند، کمک کرد. این تفاوتها به دلیل وضوح فضایی مختلف دو مجموعه داده بود. DSMهای حاصل و تصاویر شطرنجی تجسم تولید شده، همراه با الگوریتمهای طبقهبندی مورد استفاده، به ما اجازه دادند تا ویژگیهای توپوگرافی سایت مورد مطالعه را دیجیتالی کنیم و بناهای تاریخی احتمالی را شناسایی کنیم. در این مطالعه، امکانات روشهای مستقل RS (LiDAR و UAV-photogrammetry) در تولید مدلهای سهبعدی و شناسایی ویژگیهای باستانشناسی یک محوطه باستانی بررسی میشود. نتایج ما به این نتیجه رسید که پهپاد-SfM و LiDAR منابع داده با ارزشی هستند که میتوانند در پروژههای باستانشناسی برای بهبود پتانسیل برای یافتههای جدید استفاده شوند. برای کار آینده، ما استفاده از رویکردهای RS همجوشی را توصیه کردیم زیرا امکان به دست آوردن اطلاعات نسبتاً بیشتری از سایتهای باستانشناسی وجود دارد. در نتیجه، نتیجه میگیریم که استفاده از روشهای ترکیبی RS احتمالاً عملکرد تفسیر دادههای منبع RS را بهبود میبخشد و دادههای باستانشناسی نسبتاً بیشتری را در مقایسه با رویکردهای مستقل RS ارائه میکند. نتایج ما به این نتیجه رسید که پهپاد-SfM و LiDAR منابع داده با ارزشی هستند که میتوانند در پروژههای باستانشناسی برای بهبود پتانسیل برای یافتههای جدید استفاده شوند. برای کار آینده، ما استفاده از رویکردهای RS همجوشی را توصیه کردیم زیرا امکان به دست آوردن اطلاعات نسبتاً بیشتری از سایتهای باستانشناسی وجود دارد. در نتیجه، نتیجه میگیریم که استفاده از روشهای ترکیبی RS احتمالاً عملکرد تفسیر دادههای منبع RS را بهبود میبخشد و دادههای باستانشناسی نسبتاً بیشتری را در مقایسه با رویکردهای مستقل RS ارائه میکند. نتایج ما به این نتیجه رسید که پهپاد-SfM و LiDAR منابع داده با ارزشی هستند که میتوانند در پروژههای باستانشناسی برای بهبود پتانسیل برای یافتههای جدید استفاده شوند. برای کار آینده، ما استفاده از رویکردهای RS همجوشی را توصیه کردیم زیرا امکان به دست آوردن اطلاعات نسبتاً بیشتری از سایتهای باستانشناسی وجود دارد. در نتیجه، نتیجه میگیریم که استفاده از روشهای ترکیبی RS احتمالاً عملکرد تفسیر دادههای منبع RS را بهبود میبخشد و دادههای باستانشناسی نسبتاً بیشتری را در مقایسه با رویکردهای مستقل RS ارائه میکند. از آنجایی که امکان به دست آوردن اطلاعات نسبتاً بیشتری از سایتهای باستانشناسی وجود دارد، ما استفاده از رویکردهای RS را توصیه میکنیم. در نتیجه، نتیجه میگیریم که استفاده از روشهای ترکیبی RS احتمالاً عملکرد تفسیر دادههای منبع RS را بهبود میبخشد و دادههای باستانشناسی نسبتاً بیشتری را در مقایسه با رویکردهای مستقل RS ارائه میکند. از آنجایی که امکان به دست آوردن اطلاعات نسبتاً بیشتری از سایتهای باستانشناسی وجود دارد، ما استفاده از رویکردهای RS را توصیه میکنیم. در نتیجه، نتیجه میگیریم که استفاده از روشهای ترکیبی RS احتمالاً عملکرد تفسیر دادههای منبع RS را بهبود میبخشد و دادههای باستانشناسی نسبتاً بیشتری را در مقایسه با رویکردهای مستقل RS ارائه میکند.





بدون دیدگاه