

دوقلو دیجیتال شهری، نمایش مجازی داراییها، فرآیندها، سیستمها و زیرسیستمهای واقعی یک شهر است. از دادههای ناهمگن برای یادگیری و تکامل با شهر فیزیکی استفاده میکند و ادغام میکند و برای نظارت بر وضعیت فعلی و پیشبینی/پیشبینی سناریوهای احتمالی آینده پشتیبانی میکند. در این مقاله به موضوعات و پتانسیل مربوط به لایه هندسی دوقلوی دیجیتال شهر می پردازیم. از یک طرف، داده های سه بعدی دقیق برای بازسازی مورفولوژی شهری با دقت بسیار ممکن است در دسترس نباشد، و برنامه ریزی یک بررسی جدید از نظر پول و زمان پرهزینه است. از سوی دیگر، هر چه هندسه بیشتر به همتای واقعی پایبند باشد، اندازه گیری ها و شبیه سازی های مربوط به فضای شهری دقیق تر خواهد بود. ما رویکرد خود را برای توسعه لایه هندسی دوقلو دیجیتال شهر ماترا در ایتالیا شرح می دهیم. فقط با استفاده از داده های عمومی از قبل موجود. به طور خاص، روش ما از مدلهای ارتفاعی دیجیتال موجود از یک بررسی هوایی منطقهای قبلی بهرهبرداری میکند و آنها را با دادههایی که از OpenStreetMap به دست میآید یکپارچه میکند تا یک مدل سهبعدی تا حد امکان دقیق، مشروح با اطلاعات معنایی ناهمگن تولید کند. ما پتانسیل لایه هندسی را با توسعه دو سرویس خصوصیات هندسی، یعنی استخراج شیب مسیر و نقشههای نور/سایه با توجه به تاریخ و زمان خاص نشان میدهیم. در مراحل بعدی، ویژگیهای محاسبهشده به پاسخگویی به اهداف خاصی که میتواند برای شهرداری جالب باشد، مانند مسیرهای بهینه شخصیشده با در نظر گرفتن ترجیحات کاربر از جمله شیب و راحتی محیطی درک شده، کمک میکند. روش ما از مدلهای ارتفاعی دیجیتال موجود از یک بررسی هوایی منطقهای قبلی بهرهبرداری میکند و آنها را با دادههایی که از OpenStreetMap میآید یکپارچه میکند تا یک مدل سهبعدی تا حد امکان دقیق، مشروح با اطلاعات معنایی ناهمگن تولید کند. ما پتانسیل لایه هندسی را با توسعه دو سرویس خصوصیات هندسی، یعنی استخراج شیب مسیر و نقشههای نور/سایه با توجه به تاریخ و زمان خاص نشان میدهیم. در مراحل بعدی، ویژگیهای محاسبهشده به پاسخگویی به اهداف خاصی که میتواند برای شهرداری جالب باشد، مانند مسیرهای بهینه شخصیشده با در نظر گرفتن ترجیحات کاربر از جمله شیب و راحتی محیطی درک شده، کمک میکند. روش ما از مدلهای ارتفاعی دیجیتال موجود از یک بررسی هوایی منطقهای قبلی بهرهبرداری میکند و آنها را با دادههایی که از OpenStreetMap میآید یکپارچه میکند تا یک مدل سهبعدی تا حد امکان دقیق، مشروح با اطلاعات معنایی ناهمگن تولید کند. ما پتانسیل لایه هندسی را با توسعه دو سرویس خصوصیات هندسی، یعنی استخراج شیب مسیر و نقشههای نور/سایه با توجه به تاریخ و زمان خاص نشان میدهیم. در مراحل بعدی، ویژگیهای محاسبهشده به پاسخگویی به اهداف خاصی که میتواند برای شهرداری جالب باشد، مانند مسیرهای بهینه شخصیشده با در نظر گرفتن ترجیحات کاربر از جمله شیب و راحتی محیطی درک شده، کمک میکند. ما پتانسیل لایه هندسی را با توسعه دو سرویس خصوصیات هندسی، یعنی استخراج شیب مسیر و نقشههای نور/سایه با توجه به تاریخ و زمان خاص نشان میدهیم. در مراحل بعدی، ویژگیهای محاسبهشده به پاسخگویی به اهداف خاصی که میتواند برای شهرداری جالب باشد، مانند مسیرهای بهینه شخصیشده با در نظر گرفتن ترجیحات کاربر از جمله شیب و راحتی محیطی درک شده، کمک میکند. ما پتانسیل لایه هندسی را با توسعه دو سرویس خصوصیات هندسی، یعنی استخراج شیب مسیر و نقشههای نور/سایه با توجه به تاریخ و زمان خاص نشان میدهیم. در مراحل بعدی، ویژگیهای محاسبهشده به پاسخگویی به اهداف خاصی که میتواند برای شهرداری جالب باشد، مانند مسیرهای بهینه شخصیشده با در نظر گرفتن ترجیحات کاربر از جمله شیب و راحتی محیطی درک شده، کمک میکند.
کلید واژه ها:
مدل سازی سه بعدی ؛ هوش شهری ; دوقلو دیجیتال شهری
1. مقدمه
نگرانیها برای آیندهای پایدار با گسترش و رشد مستمر مناطق شهری ارتباط تنگاتنگی دارند و اینکه چگونه این مسائل به اندازه کافی به مسائل اساسی مانند زندگی سالم و رفاه، پایداری، تابآوری در برابر تغییرات آب و هوا و غیره میپردازد. درک ارتباطات و یکپارچهسازی برنامهریزی شهری با فناوریهای توانمند جدید (مانند مدلسازی و شبیهسازی، اینترنت اشیا، هوش مصنوعی) در حال تبدیل شدن به پارادایم جدید هر رویکرد جدید برای پیشبینی سناریوهای آینده پایداری شهری و ایجاد سیاستهای بلندمدت برای آینده است. شهرهای پایدار هوش شهری (UI) یک اکوسیستم از زیرساختها و خدمات است که امکان ایجاد یک دوقلوی دیجیتال (DT) از یک سیستم پیچیده واقعی/فیزیکی مانند یک شهر و سیستمها و زیرسیستمهای مختلف آن را فراهم میکند.1 ، 2 ].
DT های شهری را می توان به عنوان تکامل مفهوم شهر هوشمند، توسعه جهت های جدید دید: (1) سیستم های یکپارچه و هوشمند برای دولت شهر، استفاده و یکپارچه سازی داده های ناهمگن (از حسگرها تا مشارکت شهروندان) که توسط رویکردهای بهینه سازی چند رشته ای کنترل می شود. (2) یک مدل دیجیتالی منعطف و سازگار که از شهر واقعی یاد میگیرد و با آن تکامل مییابد. (3) یک مدل پیش بینی کننده قادر به پیش بینی سناریوهای آینده [ 1 ].
تعدادی از DT های شهری در هند، آسیای جنوب شرقی و اروپا اجرا شده اند [ 3 ، 4 ، 5 ، 6 ]. اکثر پیشنهادات فعلی برای حل مشکلات بسیار خاص طراحی شده اند، در حالی که نمی توانند تعمیم های موثری ارائه دهند (اطلاعات بیشتر در بخش 2.1.1 آورده شده است ).
رویکردی که در [ 1 ] دنبال میشود، در عوض، یک DT شهر را در لایههایی سازماندهی میکند که برای حل مشکلات خاص و پشتیبانی از تصمیمهای سطح بالا همکاری و پیکربندی مجدد میکنند. به صورت مدولار، لایههای جدیدی که جنبههای خاص شهر را نشان میدهند (به عنوان مثال، زیرساخت خدمات زیرزمینی، خدمات حملونقل عمومی، ویژگیهای فیزیکی و شیمیایی خاک) ممکن است به عنوان الزامات عملکردی تغییر DT اضافه شوند. در این میان، یک لایه هندسی نمایانگر مورفولوژی و ویژگی های فیزیکی (اعم از ساخته شده یا طبیعی) شهر است. لایه هندسی به عنوان یک مدل سه بعدی، کدگذاری شده به عنوان یک شبکه مثلثی، که در آن موجودیت های معنایی برجسته، مانند ساختمان ها و خیابان ها، با استفاده از مکانیسم حاشیه نویسی معنایی نشان داده می شود، نشان داده می شود. 7 ]]. مدل هندسی مشروح میتواند به اطلاعات مربوط به مکانهای خاص (مناطق، سازهها، ساختمانها و غیره) اشاره کند که برای توصیف فرآیندهای شهری که میخواهیم نظارت یا پیشبینی کنیم، لازم است.
در این مقاله، ما بر روی فرآیند ساخت لایه هندسی DT تمرکز خواهیم کرد، تولید مدل سه بعدی هندسی شهر را از داده های موجود توصیف می کنیم، و حاشیه نویسی مدل برای دستیابی به یک نمایش سه بعدی معنایی شهر که قادر است برای پاسخ به سوالات خاص مورد علاقه مدیریت شهری. همچنین، دو مثال عملی برای پرس و جو از لایه هندسی نشان داده شده است: محاسبه نقاط در نور/سایه در یک تاریخ و زمان خاص، و استخراج خودکار اطلاعات مربوط به مورفولوژی از مدل سه بعدی، که به ما امکان می دهد ابعادی را اندازه گیری کنیم. امروزه فقط از نظر فیزیکی اندازه گیری می شود.
2. مواد و روشها
2.1. پیشینه مدل سازی سه بعدی در زمینه UI
مدلهای سهبعدی بهصورت دیجیتالی شکل و ویژگیهای اشیاء یا پدیدههای واقعی را نشان میدهند که با ماهیت سهبعدی مشخص میشوند، یعنی دارای یک گسترش فضایی هستند، که همچنین میتواند دانش در رابطه با زمینه استفاده را داشته باشد. به عنوان مثال، در پزشکی، تصاویر سه بعدی معمولاً در تشخیص استفاده می شود. در بخش میراث فرهنگی، دیجیتالی کردن آثار هنری یا باستانشناسی به طور فزایندهای برای حفاظت، انتشار، و پشتیبانی از مستندسازی و مرمت استفاده میشود. در علوم زمین، مدل های سه بعدی برای پایش محیطی و ارزیابی ریسک استفاده می شود [ 8 ، 9 ]] و غیره. علاوه بر این، نمایشهای دیجیتالی استفاده از مدلها و الگوریتمهای ریاضی را برای انجام تحلیل، شبیهسازی، پیشبینی، که در پاسخ به نیازها و نیازهای جامعه مفید هستند، امکانپذیر میسازد.
دو رویکرد اساسی برای مدلسازی هندسی سه بعدی وجود دارد: طراحی و بازسازی از اکتساب دادههای واقعی.
در حالت اول، یک طراح یک مدل سه بعدی را از یک ایده مفهومی تولید می کند و آن را با استفاده از سیستم های نرم افزاری مدل سازی سه بعدی مانند Maya [ 10 ]، 3DStudioMax [ 11 ]، Catia [ 12 ] و غیره توسعه می دهد. در زمینه ساخت و ساز، 3D مدلسازی ساختمانها عمیقاً با دانش متخصصان مختلف درگیر در طراحی مرتبط است، که در یک سیستم اطلاعاتی به نام «مدلسازی اطلاعات ساختمان» (BIM) نشان داده و یکپارچه شده است. BIM [ 13] یک روش به جای یک نرم افزار ساده است و امکان همکاری متخصصان معماری، مهندسی و ساخت و ساز (AEC) را در تولید یک مدل دیجیتالی حاوی داده ها در مورد کل چرخه عمر کار، از طراحی تا ساخت و تا تخریب و تخریب آن فراهم می کند. از رده خارج کردن همچنین، BIM اجازه می دهد تا یک مدل اطلاعات پویا، از جمله عناصر پارامتری قابل تغییر، که اندازه و ظاهر ساختمان را تعیین می کند، ایجاد کنید. همین رویکرد را میتوان برای مدلسازی موجودیتهای بزرگتر، مانند نواحی شهر (مدلسازی اطلاعات ناحیه-DIM [ 14 ]) یا حتی کل شهرها (مدلسازی اطلاعات شهر-CIM [ 15 ) دنبال کرد.]). به دنبال BIM، ساختمانها با استفاده از یک مدل مجازی «ساخته میشوند» که یک «دوقلو دیجیتال» در مقیاس یک ساختمان واحد است که شامل لایههایی در هندسه، مصالح، ساختار باربر، ویژگیهای حرارتی و عملکرد انرژی، تأسیسات، هزینهها است. ، ایمنی ، تعمیر و نگهداری
علاوه بر و فراتر از BIM، استاندارد CityGML [ 16 ] یک مدل مفهومی و قالب مبادله ای برای نمایش، ذخیره سازی و تبادل مدل های شهری سه بعدی مجازی تعریف می کند. این یکپارچه سازی داده های جغرافیایی شهری را برای انواع برنامه های کاربردی برای شهرهای هوشمند و DT های شهری، از جمله برنامه ریزی شهری و منظر و BIM تسهیل می کند. به طور خاص، CityGML پنج سطح از جزئیات هندسی و معنایی (LOD) را از پایین ترین (یک چند ضلعی محدود در مدل زمین) تا بالاترین (یک ساختمان سه بعدی حاوی ویژگی های داخلی) تعریف می کند، همانطور که در شکل 1 نشان داده شده است . اصلاحات بیشتری نیز پیشنهاد شده است، به عنوان مثال، [ 17]. با این حال، ساختمان ساخته شده ممکن است از نظر هندسی از طرح اولیه منحرف شود یا در طول زمان تغییر کند. علاوه بر این، در عمل، تعداد بسیار کمی از ساختمانهای شهری دارای همتای BIM هستند و آنهایی که دارند اغلب در سطح پایینی از جزئیات مدلسازی میشوند.
در مورد دوم، یک “کپی” از یک موجود واقعی خاص از داده های اندازه گیری شده روی خود شی ساخته می شود. این نوع “اندازه گیری” بسته به جسم و ابزار مورد استفاده برای این عملیات متفاوت است، که به عنوان اکتساب شناخته می شود . برای مثال، مدلسازی یک شی به معنای به دست آوردن مجموعهای از نقاط (مختصات آنها در فضای سهبعدی) با استفاده از اسکنر لیزری، یا گرفتن عکس از جسم از هر منظر و استفاده از تکنیکهای فتوگرامتری برای استخراج مختصات سه بعدی است. نقاط با همبستگی موقعیت آنها در تصاویر مختلف. در هر دو مورد، سطح مرئی جسم به دست می آید و یک ابر نقطه ای به دست می آید تا بیشتر برای بازسازی سطح شی دیجیتال مربوطه استفاده شود. چنین رویه ای نامیده می شودبازسازی [ 18 ].
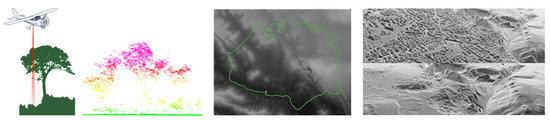
جمعآوری دادهها در مقیاس جغرافیایی معمولاً با وسایل هوایی انجام میشود، یا از طریق تصاویر یا مجموعههای نقطهای گرفتهشده توسط پرتوهای لیزر (که دومی به عنوان LiDAR شناخته میشود – تشخیص نور و محدوده). سیگنال پرتو به طور کامل توسط سازه های ساخته شده مانند ساختمان ها مسدود می شود. با این حال، پیچیدهترین سیستمهای LiDAR میتوانند از پوشش گیاهی فراتر بروند و نقاط روی زمین را ثبت کنند و بازده پالس اول و آخرین پالس لیزر را ذخیره کنند. اگر چند بار برگشت برای یک پالس وجود داشته باشد، اولین مورد مطمئناً در بالاترین سطح (به عنوان مثال، بالای درخت) است و تنها آخرین مورد می تواند روی زمین باشد. بنابراین، از ابر نقطه LiDAR “خام”، دو مدل مختلف از منطقه مورد بررسی ممکن است بازسازی شود، بهترتیب به نامهای مدل سطح دیجیتال (DSM) و مدل دیجیتال زمین (DTM). اولی مجموعه ای از نقاط بر روی سطوح بالای ساختمان ها، درختان، برج ها و دیگر ویژگی ها بر فراز زمین برهنه، و دومی نمایش زمین برهنه. محاسبه زمین برهنه در مناطق شهری نیاز به پردازش فشرده (حذف نقاط پرت، طبقه بندی نقاط، تشخیص ساختار، درونیابی) دارد و بدون خطا نیست. در نهایت، نقاط DSM و DTM را می توان به عنوان یک تصویر شطرنجی از مقادیر z با فاصله یکسان ساختار داد [19 ]. شکل 2 یک اکتساب LiDAR، تصاویر DSM و DTM بازسازی شده و مش به دست آمده از مثلث بندی نقاط DSM/DTM را نشان می دهد.
در حالی که وضوح داده خام LiDAR به تعداد نقاط نمونه برداری در واحد سطح اشاره دارد، وضوح DSM/DTM به دست آمده با پردازش داده های LiDAR به طور کلی کمتر است و با اندازه سلول شبکه/تصویر یکنواخت مطابقت دارد. وضوح مدل سه بعدی باید برای به تصویر کشیدن مورفولوژی قلمرو در سطح جزئیاتی که توسط برنامه ها مورد نیاز است، کافی باشد. هرچه رزولوشن بالاتر باشد، سطح جزئیات بیشتری را می توان مدل مشاهده کرد. اگر دادههای با وضوح بالا گرفته شود، مدل شهری سهبعدی مطابقت هندسی قوی و دقیقی با شهر واقعی خواهد داشت. با این حال، بر خلاف BIM، مدل بازسازی شده تقریباً کاملاً هندسی است و بسیاری از اطلاعات مورد نیاز برای تفسیر فرآیندهای شهری را ندارد.20 ]، در صورتی که دادههای اکتساب خام موجود باشد. در غیر این صورت، مدل هندسی باید از نظر معنایی با دانشی که از منابع دیگر می آید غنی شود.
در رویکرد خود، ما از دادههای بهدستآمده شروع میکنیم تا یک مطابقت مورفولوژیکی قوی با محیط ساختهشده و طبیعی داشته باشیم، و سپس مدل بازسازیشده را با دانش اضافی از طریق فرآیند حاشیهنویسی معنایی غنیسازی کنیم تا از نظارت و تصمیمگیری شهری حمایت کنیم.
2.1.1. دوقلوهای دیجیتالی بافت شهری
همانطور که قبلاً در بخش 1 معرفی شد ، چندین تلاش برای ساخت DTهای بافت شهری انجام شده است. در [ 21 ]، یک مدل سه بعدی از شهر نیویورک با شروع از داده های 2 بعدی و 2.5 بعدی به دست می آید و به طور آشکار در دسترس قرار می گیرد، اما (i) پایه ساختمان ها بر روی ارتفاع صفر تنظیم شده است و (ii) مدل تعیین نشده است. با سایر خدمات شهر ادغام شده است، بنابراین پتانسیل مدل را برای تجسم محدود می کند. نتیجه مشابهی در [ 3 و 5 ارائه شده است]، که در آن یک نمایش سه بعدی از مناطق خاص شهر از طریق تکنیکهای اسکن لیزری و ترکیب با مدلهای ارتفاعی دیجیتال با هدف اصلی تجسم و برقراری ارتباط ظاهر و گسترش ساختمانها برای سهولت در برنامهریزی شهری و در عین حال شبیهسازی واقعی (مانند باد /pollution) روی ماکت سه بعدی انجام نمی شود. نویسندگان ذکر میکنند که معرفی هندسههای معناییسازی شده به ما این امکان را میدهد که بسیار فراتر از هندسه ساختمانی خالص برویم، حتی اگر این نتیجه در پروژهها به دست نیامد. هدف ما ساخت یک لایه هندسی عملیاتی است که خدمات DT می تواند برای دستیابی به اهداف پیچیده تر مورد بازجویی و استفاده قرار گیرد.
در [ 4 ، 22 ]، دو مدل سه بعدی مختلف برای شهر تولید می شود: یکی «مدل مش واقعیت» که کاملاً شبیه شهر واقعی است که برای اهداف تجسم مفید است و دیگری «شهر سه بعدی معنایی» با دقت کمتر اما اطلاعات جاسازی شده که مفید برای شبیه سازی (به عنوان مثال، شبیه سازی باد). با توجه به این رویکرد، روش ما مسیر مشابهی را برای تولید ساختمان دنبال میکند، اما به یک مدل هندسی واحد بر اساس دادههای واقعی و افزوده شده با حاشیهنویسی معنایی دست مییابد. مدل نهایی نمایشهای هندسی قابل پرس و جو را تعبیه میکند (به عنوان مثال، قوسهای خیابان)، که برای رسیدن به اهداف ذینفعان مدیریت شهری مورد نیاز است (به بخش 2.1.2 مراجعه کنید ).
در نهایت، در [ 6 ] تلاش زیادی برای تولید یک مدل سه بعدی کاملاً قابل پرس و جو صرف شده است که واقعیت را نشان می دهد، اما این کار با یک رویکرد طراحی انجام شده است، بنابراین از بازسازی خودکار بازنمایی شهر، که تمرکز اصلی است، جلوگیری می شود. این کار.
2.1.2. آخرین هنر در بازسازی شهر
محیط های سه بعدی را می توان به صورت دستی از طریق نرم افزارهای تخصصی مانند CityEngine مدل سازی کرد [ 23 ، 24 ]. CityEngine یک نرمافزار مدلسازی سه بعدی است که یک رویکرد مدلسازی رویهای را برای تولید سناریوهای شهری با وارد کردن دادههای دو بعدی و سه بعدی از منابع مختلف نقشه پیادهسازی میکند. با این حال، منحنی یادگیری قوانین تولید برای کاربر بی تجربه قابل چشم پوشی نیست. بنابراین، این تحقیق بر روی روشهای خودکار یا نیمه خودکار برای استخراج یک نمایش سه بعدی با توجه به نقشه دو بعدی یک شهر متمرکز است. بیشترین استفاده OpenStreetMap (OSM) [ 25] به عنوان کامل ترین مجموعه داده نقشه منبع باز. عناصر نقشه از طریق ردپای هندسه دوبعدی آنها توصیف میشوند و ممکن است با ویژگیهای اختیاری مانند ارتفاع سه بعدی زمین، طبقه و ارتفاع ساختمان، شکل و رنگ سقف مشخص شوند. OSM توسط جامعه ای از داوطلبان ساخته شده است که با ابزارهای خود و کم و بیش قابل اعتماد، محیط محلی خود را نقشه برداری یا تجدید نظر می کنند. بنابراین، بعید نیست که یک ساختمان با جزئیات بالا توصیف شود، در حالی که ساختمان های مجاور به طور تقریبی ترسیم شده باشند. گاهی اوقات ساختمان ها تقریباً با عناصر مرزی متقاطع تعریف می شوند. همچنین اتفاق می افتد که مشارکت کنندگان مختلف یک ساختمان را به طور متفاوتی نقشه برداری می کنند. از این رو، دادههای OSM باید تمیز و اعتبار سنجی شوند تا ردپای ساختمان به درستی تفسیر شود و با دادههای اضافی ادغام شود تا ویژگیهای لازم برای بازسازی مدل سهبعدی به دست آید، که ارتفاع بسیار مهم است. مرجع. [26 ] ارتفاع ساختمان ها را از اطلاعات مربوط به طبقات با در نظر گرفتن ارتفاع متوسط 3.2 متر در هر طبقه بدست می آورد. در غیر این صورت، ارتفاع پیش فرض را با توجه به نوع ساختمان اختصاص می دهد (مثلاً با فرض میانگین سه طبقه برای ساختمان های نوع “مسکونی” یا “هتل”). متأسفانه، بسیاری از ساختمانها به دلیل کمبود کلی ویژگیها در توضیحات OSM، ارتفاع یکسانی را نشان میدهند. در [ 27 ] ارتفاع از یک مجموعه داده ابر نقطه هوایی به دست می آید، به عنوان مثال، به دست آمده توسط LiDAR، تجزیه معنایی/برچسب گذاری شده بر اساس چند ضلعی OSM. این رویکرد دارای ویژگی مثبت بیان ارتفاع نقاط زمین نیز می باشد. علاوه بر این، تعدادی برنامه کاربردی برای تولید یک نقشه سه بعدی از نقشه دو بعدی وجود دارد [ 28]؛ در این میان، OSM2World یک پروژه منبع باز با استفاده از ویژگی های ارتفاع یا، در صورت در دسترس نبودن، داده های DEM از OpenDEM (مدل ارتفاعی دیجیتال باز) [ 29 ]، یک پروژه داده باز برای جمع آوری و بهبود مدل ارتفاعی دیجیتال رایگان از زمین است. ما رویکرد مشابهی را برای مدل هندسی ماترا دنبال کردیم.
2.2. Matera DT
ماترا شهری در منطقه باسیلیکاتا، در جنوب ایتالیا، با مورفولوژی پیچیده با درههای عمیق و فلاتهای مرتفع، یکی از خاطره انگیزترین مناظر مدیترانه است. قلب مرکز تاریخی Piazza Vittorio Veneto و Hypogeum واقع در زیر آن است که سه هزار سال پیش ساخته شده و از سطوح زیرزمینی متعددی تشکیل شده و دارای یک مخزن بزرگ آب است. “منطقه ساسی” مجاور مجموعه ای از خانه های غار است که در دره باستانی رودخانه حک شده است. در اواخر دهه 1800، این مکان به دلیل فقر غیرقابل تحمل و بهداشت ضعیف مورد توجه قرار گرفت. چشم انداز جدید و سرمایه گذاری باعث شد که غارنشینان به یک مقصد گردشگری تاریخی و یک جامعه هنری پر جنب و جوش تبدیل شوند، سایت میراث جهانی یونسکو از سال 1993. پس از تبدیل شدن به پایتخت فرهنگی اروپا در سال 2019،
هدف DT در نظر گرفته شده در چشم انداز UI، ارائه پشتیبانی از فعالیت های دولت، مدیریت و مدیریت شهری است. نمونههایی از چنین فعالیتهایی میتواند نظارت و پیشبینی ترافیک وسایل نقلیه یا وضعیت آلودگی هوا، و تصمیمگیری بر اساس شواهد بهدستآمده توسط شبکه حسگر DT و با قابلیتهای تحلیلی باشد. DT همچنین برای شهروندان و انجمنهایی در شهر مفید است که میتوانند با ارائه پیشنهادهایی بر اساس استدلالهای مستند (مدیریت مشارکتی شهری) تأثیر تغییرات بر کاربری فضای شهری را پیشنهاد و ارزیابی کنند.
فرآیند استدلال در پس فرآیندهایی که در بالا توضیح داده شد بر اساس یک تعامل تنگاتنگ بین هندسه سازه های ساخته شده و فرآیندهایی است که در آن اتفاق می افتد. در واقع، اطلاعات ریختشناسی را میتوان از مدل سهبعدی استخراج کرد و به عنوان مثال، میتواند به ارزیابی دسترسی و راحتی درک شده فضاها و مسیرهای شهری کمک کند: بزرگی شیب، اندازه و ارتفاع پلهها، در دسترس بودن رمپها برای صندلیهای چرخدار میتواند ترجیحات یا ترجیحات را تعیین کند. حتی الزامات دسترسی برای پروفایل های مختلف کاربر، و این ویژگی ها را می توان در یک مدل سه بعدی با وضوح کافی شناسایی کرد. علاوه بر این، مدل سهبعدی امکان محاسبه نقاط دریافت نور خورشید را در زمان و تاریخ معین میدهد و تابش خورشیدی یک عامل آسایش مهم در تابستان یا زمستان است. علاوه بر این، یک نمایش سه بعدی می تواند تنظیمات الگوریتمی را برای شبیه سازی آلاینده در هوا فراهم کند. یک مدل سهبعدی دقیق میتواند تجسم آموزنده مناطق متمایز مرکز شهر و تجربه بازدید از راه دور، مجازی و غوطهور از مکانهایی را ارائه دهد که به آسانی قابل دسترسی نیستند، مانند کلیساهای روپیستری که روی سنگ آهک در مطالعه موردی ماترا ارائه شده است. این کاغذ.
یکی از عواملی که می تواند مانع از پتانسیل مدل های سه بعدی با وضوح بالا شود، مربوط به هزینه های مربوط به خرید سه بعدی است: این در واقع یکی از انگیزه های کار ارائه شده است که نشان می دهد چگونه ساخت مدل سه بعدی می تواند با استفاده از داده های موجود شروع شود. در حوزه عمومی، و احتمالاً به محض کسب اطلاعات بیشتر، پالایش می شود. از این رو، ما از داده های موجود از یک نظرسنجی ملی قبلی استفاده کردیم: به طور خاص، یک مدل DSM و یک مدل DTM، در قالب تصاویر GeoTiff، با وضوح متناظر با 5 متر × 5 متر (عرض و ارتفاع پیکسل)، ارائه شده توسط geo-portal. منطقه بازیلیکاتا [ 30 ]. در ادامه، پردازش و دستاوردهای به دست آمده با داده های موجود را شرح می دهیم.
2.2.1. بازسازی لایه هندسی سه بعدی برای Matera DT
همانطور که پیش بینی می شد، ما یک رویکرد مشابه به [ 27 ]، بهره برداری از اطلاعات دو بعدی از OpenStreetMap [ 25 ] و افزودن داده های ارتفاع از منابع خارجی را اجرا کردیم. ما با ارجاع متقابل ساختمان و خیابان ها (فقط راه های OSM و روابط با برچسب “ساختمان” یا “بزرگراه” در اجرای فعلی در نظر گرفته شده است – این کار با فیلتر کردن آنها در QGIS [ 31 ]) از OpenStreetMap با DTM و DSM برای استخراج اطلاعات ارتفاع واقعی خود به صورت زیر:
-
حل مسائل هندسی و توپولوژیکی در ساخت چند ضلعی های مرزی.
-
چند ضلعیهای مرزی ساختمان و بخشهای خیابان را به عنوان محدودیتهایی برای مثلثبندی ناحیه بین ساختمانها درج کنید (یعنی عناصری که باید به صورت لبهها در شبکه نهایی نمایش داده شوند). ما از کتابخانه مثلث شوچوک برای تولید مثلث محدود استفاده می کنیم [ 32 ].
-
هر نقطه در مثلث را طوری ترجمه کنید که ارتفاع آن با سلول DTM که نقطه در ابتدا در آن قرار دارد مطابقت داشته باشد. نقاط متعلق به ساختمان ها طوری تنظیم می شوند که ارتفاع آنها با میانگین سلول های DTM که ساختمان در آن قرار دارد مطابقت داشته باشد.
-
به هر ساختمان ارتفاعی برابر با میانگین اختلاف بین سلول های DSM و DTM مربوطه که شامل ساختمان هستند اختصاص دهید و بر اساس آن پایه ساختمان را اکسترود کنید.
-
مرز اکسترود شده را با مثلث کردن چند ضلعی مربوطه ببندید (دوباره با استفاده از مثلث).
این رویکرد امکان ایجاد تقریبی از ساختمانها را در LOD1 استاندارد CityGML، با ساختمانها بهعنوان اشکال اساسی بدون جزئیات سقف و نما میدهد. چالش اصلی رفع ناسازگاریهای هندسی و توپولوژیکی در دادههای OSM است: در واقع، بسیاری از ردپای ساختمان دارای نقصهای توپولوژیکی هستند (چند ضلعیهای باز، خود تقاطعها، نقاط تکراری و غیره). یک مثال را می توان در شکل 3 (سمت چپ) مشاهده کرد. برای حل این مشکل، چند ضلعی ها در QGIS با (i) بافر کردن چند ضلعی ها با فاصله 1 سانتی متر (به ما امکان می دهد خطای شکاف ارائه شده در [ 33 ] را برطرف کنیم) و (ii) حل کردن نتیجه (به ما امکان می دهد) از قبل پردازش می شوند. برای رفع خطای همپوشانی ارائه شده در [ 33])، در حالی که خطای معرفی شده توسط کاربران مختلف در مدل سازی یک ساختمان را کاهش می دهد (چند ضلعی های داخلی ادغام می شوند و فقط نمایه داخلی حفظ می شود). سپس نتیجه با استفاده از سیستم مختصات محلی (WGS 84 UTM 33N EPSG 32633) صادر می شود.
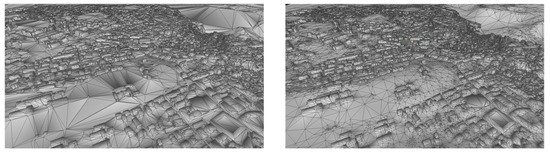
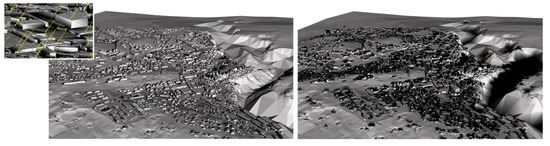
همانطور که مشاهده می شود، وضوح داده های OSM برای ایجاد یک مدل سه بعدی که نمایانگر مدرن ترین بخش شهر است، کافی است، که در یک منطقه نسبتاً مسطح توسعه می یابد و فاصله مشخصی را بین عناصر ساخته شده نشان می دهد. از سوی دیگر، مدل تولید شده برای منطقه ساسی، و برای تجسم ضربه یا برای تجزیه و تحلیل هندسی دقیق مورد نیاز برخی از اهداف کافی نیست. این را می توان به راحتی در شکل 4 مشاهده کرد. از آنجایی که متأسفانه هیچ داده LiDAR با وضوح بالاتر برای منطقه موجود نیست، مدل را تا حد امکان به شرح زیر اصلاح کردیم:
-
بخش های مربوط به جاده ها با درج نقاط اضافی در هر تقاطع بین بخش و شبکه DTM پالایش می شوند: این به ما امکان می دهد نقاط ارتفاع شناخته شده را اضافه کنیم.
-
سطح زمین نیز بر این اساس تصفیه می شود ( شکل 5 را ببینید ).
-
مش کلی زمین با استفاده از روش پالایش ارائه شده توسط کتابخانه مثلث شوچوک [ 32 ] تصفیه می شود.
مثلث [ 32 ] روش مرجع برای تولید مش سطحی است. اصلاح اعمال شده بر اساس معیارهای کیفیت مثلث است، به عنوان مثال، یک آستانه به کوچکترین زاویه مثلث (20 درجه در این اجرا) تنظیم شده است. این یک مدل کمی ظریفتر ایجاد میکند، مثلثهای جدید و راسهای جدید اضافه میکند، که ارتفاع آنها از سلول DTM که در آن قرار میگیرند مشتق میشود. از سوی دیگر، این روش تضمین می کند که مثلث ها بدون موارد تقریباً منحط (زوایای بسیار نزدیک به صفر) به خوبی شکل می گیرند، بنابراین استحکام عددی را برای الگوریتم های پردازش پایین دست تضمین می کند. نتیجه در شکل 5 نشان داده شده است(درست). همانطور که می توان به راحتی مشاهده کرد، نتیجه نهایی همچنان فاقد وضوح کافی در ناحیه ساسی است. با این حال، این به ما امکان می دهد رندرهای دلپذیرتر و مقادیر قابل اعتمادتری را در مورد شیب جاده به دست آوریم، ویژگی که در بافت وسیع تر شهر DT از اهمیت کلیدی برخوردار است (به بخش 2.2.2 مراجعه کنید ).
هنگامی که هندسه منطقه ایجاد شد، مدل را به صورت معنایی حاشیه نویسی می کنیم. تا کنون، ما فقط عناصر را از OSM وارد می کنیم، یعنی ساختمان ها و خیابان ها. با برچسبگذاری لبههای خیابان و ساختن مثلثها با شاخصهای OSM مربوطه، ما یک ارتباط دووجهی بین بخشهایی از هندسه و موجودیتهای OSM خاص و ویژگیهای آنها ایجاد میکنیم. چنین اطلاعاتی را می توان بعداً در رابطه با مؤلفه هندسی آنها مورد بازجویی و تجزیه و تحلیل قرار داد.
برای حاشیهنویسی ساختمانها (مجموعههای مثلث) و خیابانها (مجموعههایی از لبهها) از همان رویکردی پیروی میکنیم که در [ 34 ]]: در طول فرآیند تولید مدل سه بعدی، ما به طور خودکار برای هر ساختمان یک موجودیت «حاشیهنویسی» ایجاد میکنیم که شامل شاخصهای مثلثهای مربوطه است. اینها با رویکرد رشد منطقه به دست می آیند: شروع از یک مثلث در داخل هر چند ضلعی (به عنوان مثال، مثلث چپ لبه اول چند ضلعی، زیرا آنها به طور مداوم در خلاف جهت عقربه های ساعت با ساخت مرتب می شوند). علاوه بر هندسه منطقه مشروح، شناسه OSM و همچنین هر ابرداده اضافی در مورد ساختمان به حاشیه نویسی اضافه می شود. به طور مشابه برای کمانهای خیابانی، ما یک نهاد حاشیهنویسی ایجاد میکنیم که شامل شاخصهای رئوس متوالی است که این لبهها را تعریف میکنند، همراه با اطلاعاتی درباره OSM id قوس و سایر ابردادههای مفید.
شکل 6 مدل پالایش شده را نشان می دهد که موجودیت هایی از نوع “ساختمان” و “خیابان” برجسته شده است.
2.2.2. خصوصیات مورفولوژیکی
ما یک سرویس خصوصیات مورفولوژیکی طراحی کردیم که تجزیه و تحلیل شکل را بر روی مدل شهر سه بعدی انجام میدهد و عناصر هندسی را با معیارها/ابعاد مورفولوژیکی استخراجشده حاشیهنویسی میکند. تاکنون تحلیل شیب شبکه راه ها اجرا شده است. شبکه راه در OSM به صورت یک نمودار نشان داده می شود که گره های آن شاخه های مسیرهای مختلف و قوس های آن بخش های جاده ای هستند که دو گره بدون انشعاب را به هم متصل می کنند. هر کمان به عنوان مجموعهای از لبهها در مدل سهبعدی درج شده و بهطور پیوسته حاشیهنویسی شده است.
برای هر یال که به عنوان “جاده” حاشیه نویسی می شود، شیب آن از ارتفاع رئوس فرودی آن به عنوان زاویه تشکیل شده توسط قطعه و صفحه XY محاسبه می شود. به طور کلی، قوس های جاده ای از یک دنباله از لبه ها تشکیل شده اند. شیب کل یک قوس مقدار تجمیعی از شیب های بخش جداگانه است. این سرویس چندین جایگزین را ارائه می دهد، یعنی شیب حداقل، حداکثر و متوسط.
علاوه بر حاشیهنویسی لبهها با مقدار شیب آنها، نتایج توصیف مورفولوژیکی مسیرها در یک فایل خروجی ذخیره میشود (به طور خاص، یک فایل json. که نمودار جاده را با حداقل، حداکثر و شیب متوسط برای هر قوس ذخیره میکند) که بین آنها به اشتراک گذاشته میشود. خدمات DT
2.2.3. محاسبات خورشید/سایه
مدل سه بعدی برای محاسبه دقیق مناطق سایه دار/روشن در یک زمان معین از روز و زمان سال، با در نظر گرفتن سازه های ساخته شده که می توانند نقاط زمین را تحت الشعاع قرار دهند، ضروری است.
الگوریتم بر اساس محاسبه تقاطع یک پرتو شیب شناخته شده با مدل شهر است. تمام رئوس در مدل تست شده اند و در حال حاضر نتیجه باینری است (در نور/در سایه). درخواست سرویس به عنوان ورودی سال، روز و زمان مورد استفاده برای محاسبه زاویه تابش خورشید است.
الگوریتم پیاده سازی شده به صورت زیر عمل می کند:
-
زاویه پرتوهای خورشید، از طریق کتابخانه SOLPOS [ 35 ]، بر اساس پارامترهای ورودی (تاریخ و زمان) محاسبه میشود.
-
بررسی تقاطع بین پرتو و هر رأس در مدل سه بعدی انجام می شود: اگر هیچ تقاطعی وجود نداشته باشد، آنگاه راس روشن می شود. در غیر این صورت، راس سایه دار است.
3. نتایج
شکل 7 برخی از نتایج توصیف شیب شبکه های جاده را با استفاده از مقادیر محلی، در هر بخش نشان می دهد، در حالی که شکل 8مقدار متوسط قوس ها را نشان می دهد. توسعههای آتی این سرویس ممکن است شامل تحلیل عرض خیابانها، شیب و عرض سقفها، تشخیص و تحلیل کمی سازهها مانند روسازی، رمپ، پلهها، شناسایی مسیرهای ناهموار و غیره باشد. تحلیل مورفولوژیکی بر اساس مدل هندسی سه بعدی و از اطلاعات موجود در آن بهره برداری می کند. بنابراین، دقت نتایج مشخصسازی به شدت با کیفیت مدل، یعنی وضوح دادههای ورودی مرتبط است. به عنوان مثال، تشخیص یک روسازی یا یک سطح شیب دار نیاز به سطحی از جزئیات در حدود 5 سانتی متر در ارتفاع دارد. با این حال، وضوح پایین بر خصوصیات شیب نیز تأثیر می گذارد، حداقل در ناحیه ساسی ( شکل 7)، وسط و راست). در اینجا بازسازی، و در نتیجه نمایش مسیرها و محاسبه شیب آنها، به وضوح درشت است. بنابراین یک نقطه بحرانی در دسترس بودن داده ها برای یک مدل سه بعدی پیشرفته تر و در نتیجه اندازه گیری های دقیق تر و قابل اعتمادتر است.
نمونه ای از محاسبه سایه در شکل 9 نشان داده شده است . این سرویس می تواند هم برای نظارت بر سایه فعلی و هم برای تجسم موقعیت های گذشته یا آینده استفاده شود. زمان محاسبه به پیچیدگی مدل سه بعدی بستگی دارد، به عنوان مثال، تعداد راس هایی که باید مشخص شوند و تعداد سطوح برای بررسی تقاطع های احتمالی. خروجی یک نقشه سایه مشترک است، در واقع بردار بیتی است که در i -امین موقعیت 1 ذخیره می شود اگر iراس -ام روشن است، در غیر این صورت 0. در وضعیت فعلی، خروجی بر اساس تاریخ و زمان به روشنایی/سایه بالقوه محدود می شود: هیچ اطلاعات زمان واقعی یا پیش بینی آب و هوا در پوشش آسمان در نظر گرفته نمی شود. به طور مشابه، خروجی باینری است (0 = سایه، 1 = نور) در حالی که اگر پوشش آسمان از داده ها یا پیش بینی های ماهواره ای در نظر گرفته شود، می تواند یک مقدار واقعی در محدوده [0-1] باشد، و/یا رفتار نور فیزیکی در نظر گرفته شده است (به عنوان مثال، درجه بندی سایه های مختلف داده شده توسط پرتوهای بازتاب شده). همانند سرویس خصوصیات مورفولوژیکی، کیفیت برآورد سایه/تابش به وضوح مدل سه بعدی بستگی دارد. به ویژه، از آنجایی که ساختمان ها از هواپیما بیرون کشیده شده اند، به عنوان بلوک های بسته دیده می شوند. موقعیت هایی مانند ایوان ها یا سایر مناطق نیمه پوشیده در حال حاضر نشان داده نمی شوند،
این دو سرویس، علاوه بر پاسخ مستقیم به سؤال کاربر، مانند “شیب این مسیر چیست؟” یا “آیا زمین بازی هنوز زیر آفتاب است؟”، برای ارائه اطلاعات مربوط به مورفولوژی شهر برای خدمات بیشتر و تحقق اهداف پیچیده تر به لطف ادغام آنها طراحی شده اند. برای مثال، هم شیب مسیر و هم مشخصههای خورشید/سایه احتمالاً بر حس رفاه درک شده توسط عابر پیاده در شهر تأثیر میگذارند (به علاوه سایر عوامل محیطی مانند صدا، ترافیک، آلودگی هوا و غیره). یک الگوریتم برنامه ریزی مسیر می تواند به بازدیدکنندگان کمک کند تا بازدید خود را بهینه کنند [ 36]، با در نظر گرفتن دو مشخصه به عنوان وزن قوس یا گره و تعیین یک مسیر بهینه با توجه به ترجیحات کاربر، به عنوان مثال، کوتاه ترین مسیر در مقابل حداقل شیب در مقابل سایه تا حد ممکن. تجزیه و تحلیل شیب همچنین برای تعیین مسیرهای قابل دسترس برای کاربران آسیب دیده کاربردی است: به عنوان مثال، یک خیابان شیب دار برای ویلچر دستی قابل دسترسی نیست. یافتن یک مسیر قابل دسترس برای کاربر ویلچر مربوط به یافتن مسیری است که در آن هر بخش از قوس دارای شیب کمتر یا مساوی با یک آستانه خاص است (به عنوان مرجع، رمپهای استاندارد ویلچر حدود 5 درجه شیب را نشان میدهند).
در نهایت، مدل سهبعدی مشروحشده میتواند به طور موثر اطلاعات جغرافیایی ارجاعشده را از لایههای دیگر، مانند جریانهای داده از حسگرهای بیدرنگ، ارائه و ارتباط برقرار کند. در شکل 10 ما تصور کردیم که نقاط مختلف مورد علاقه (مثلا موزهها، ساختمانهای تاریخی) را با توجه به سطح اشغال تجسم کنیم، که در آن تعداد افراد میتواند با اشغال واقعی ارسال شده به DT توسط وبکم/حسگر مطابقت داشته باشد، یا توسط وبکمها/حسگرها پیشبینی شود. مدل های داده محور [ 37 ]. در سطح بالاتر، مدلهای مبتنی بر هوش مصنوعی (AI) قابلیتهای «هوشمند» را به Digital Twin ارائه میکنند [ 38 ]]، به عنوان مثال، برای انتزاع و جمع آوری اطلاعات تولید شده توسط لایه های مختلف، برای سازماندهی توالی مداخلات در قلمرو، اما همچنین برای واکنش مستقل به موقعیت های خاصی که ممکن است به طور پویا در بافت شهری ظاهر شوند (به عنوان مثال، دادن هشدار در صورت سطح اشغال نقطه مورد علاقه خیلی بالاست).
4. نتیجه گیری
در این مقاله، ما یک رویکرد برای طراحی سریع و توسعه لایه هندسی یک دوقلو دیجیتال شهری، توصیف مورفولوژی و ساختارهای فیزیکی شهر، همراه با دانش اضافی مربوط به مکانهای خاص، پیشنهاد کردیم. این روش از دادههای OpenStreetMap و مورفولوژی زمین بهدستآمده با تکنیکهای LiDAR، یعنی مدلهای دیجیتالی زمین و مدلهای سطح دیجیتال، بهرهبرداری میکند. علاوه بر این، لایه هندسی با اطلاعات معنایی حاشیه نویسی بخش های هندسی غنی می شود.
پتانسیل این رویکرد با تولید لایه هندسی برای دوقلوهای دیجیتالی شهر ماترا ایتالیا و رمزگذاری اطلاعات مربوط به ساختمانها و خیابانها نشان داده میشود. از آن برای پاسخگویی به اهداف خاص مطرح شده توسط شهرداری استفاده میشود: استخراج مناطق روشن/سایه تاریخ و زمان دادهشده، استخراج خودکار اطلاعات مربوط به مورفولوژی در مورد خیابانها و اطلاعرسانی سطح اشغال برخی از نقاط مورد علاقه. تمرکز کار ما در دستیابی به یک مدل سه بعدی با کیفیت بالا نیست، بلکه در ساخت یک مدل هندسی کاربردی از شهر، بهرهبرداری از دادههای موجود در بهترین حالت، تلاش برای دستیابی به نمایشی است که قادر به پشتیبانی از جستارهای مرتبط با هندسه باشد. در آینده، ما انتظار داریم که این را با چندین لایه دیگر ادغام کنیم تا به سوالات پیچیده پاسخ دهیم:
در مرحله بعدی پروژه، ما قرار است افراد برجسته دیگری را برای اهداف پروژه در نظر بگیریم، مانند میادین، مناطق سبز، خدمات عمومی و تجاری، مبلمان و تاسیسات شهری و غیره. علاوه بر این، ما در حال حاضر در حال توسعه خدمات یکپارچه اضافی هستیم که از مدل هندسی استفاده می کند: برای مثال، برنامه ریزی مسیر با استفاده از شیب و خورشید/سایه به عنوان اولویت. ما همچنین دادههای ماهوارهای تاریخی/پیشبینی را برای محاسبه تابش واقعی خورشید با توجه به شرایط آسمان و تخمین میانگین تابش در سال یکپارچه میکنیم. توسعه آینده بر پایش و شبیه سازی انتشار آلاینده در هوا متمرکز خواهد بود که بر اساس مدل سه بعدی حجم هوا محاسبه می شود.
در نهایت، با چالش تولید مدلهای سه بعدی در CityGML LOD بالاتر، اشارهای دیگر برای کارهای آینده ارائه میشود. به عنوان مثال، مدل های LOD2 ویژگی های مربوط به شکل سقف و جزئیات نما را ارائه می دهند. این عناصر می توانند با اطمینان بیشتری میزان تابش اشعه خورشید را بر روی دمای درک شده و تابش کل و بهره حرارتی ایمپلنت های خورشیدی تعریف کنند.
منابع
- کاستلی، جی. سستا، ا. دیز، م. پادولا، م. روازنی، پ. رینالدی، جی. ساوازی، س. Spagnuolo، M. استرامبینی، ال. توگنولا، جی. و همکاران هوش شهری: یک مدل مدولار، کاملاً یکپارچه و در حال تحول برای خواهرخواندگی دیجیتالی شهرها. در مجموعه مقالات شانزدهمین کنفرانس بین المللی IEEE 2019 در مورد شهرهای هوشمند: بهبود کیفیت زندگی با استفاده از فناوری اطلاعات و ارتباطات و اینترنت اشیا و هوش مصنوعی (HONET-ICT)، شارلوت، NC، ایالات متحده آمریکا، 6 تا 9 اکتبر 2019؛ صص 33-37. [ Google Scholar ]
- Ferrão, P. مسیرهای پایداری شهری: چالش ها و فرصت ها برای ایالات متحده ; انتشارات آکادمی ملی: واشنگتن، دی سی، ایالات متحده آمریکا، 2016. [ Google Scholar ] [ CrossRef ][ Green Version ]
- دمبسکی، اف. وسنر، یو. لتزگوس، ام. رودات، م. یامو، سی. دوقلوهای دیجیتال شهری برای شهرهای هوشمند و شهروندان: مطالعه موردی هرنبرگ، آلمان. پایداری 2020 ، 12 ، 2307. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- پروژه دوقلوهای دیجیتال کالاساتاما. در دسترس آنلاین: https://www.hel.fi/helsinki/en/administration/information/general/3d/3d (در 7 ژوئن 2022 قابل دسترسی است).
- شروتر، جی. Hürzeler, C. دوقلو دیجیتال شهر زوریخ برای برنامه ریزی شهری. J. Photogramm. سنسور از راه دور Geoinf. علمی 2020 ، 88 ، 99-112. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- سنگاپور مجازی در دسترس آنلاین: https://www.nrf.gov.sg/programmes/virtual-singapore (در 7 ژوئن 2022 قابل دسترسی است).
- کاتالانو، سی. مورتارا، م. Spagnuolo، M. فالکیدینو، بی. معناشناسی و رسانه های سه بعدی: مسائل و دیدگاه های کنونی. محاسبه کنید. نمودار. 2011 ، 35 ، 869-877. [ Google Scholar ] [ CrossRef ]
- میولا، م. Cabiddu، D. پیتالوگا، اس. مورتارا، م. وتوشی زوکلینی، م. Imitazione, G. یک رویکرد محاسباتی برای مدلسازی سه بعدی و ادغام دادههای جغرافیایی ناهمگن. محاسبه کنید. نمودار. 2022 ، 105 ، 105-118. [ Google Scholar ] [ CrossRef ]
- برتا، اس. Cabiddu، D. پیتالوگا، اس. مورتارا، م. Spagnuolo، M. زوکلینی، نمونه برداری محیطی تطبیقی MV: تأثیر متقابل بین زمین آمار و هندسه. در مجموعه مقالات ابزارها و برنامههای هوشمند برای گرافیک – کنفرانس فصل ایتالیایی یوروگرافیک، برشا، ایتالیا، 18 تا 19 اکتبر 2018؛ Livesu, M., Pintore, G., Signoroni, A., Eds. انجمن یوروگرافیک: مونیخ، آلمان، 2018. [ Google Scholar ] [ CrossRef ]
- اتودسک مایا. در دسترس آنلاین: https://www.autodesk.it/products/maya/overview (در 7 ژوئن 2022 قابل دسترسی است).
- Autodesk 3DStudioMax. در دسترس آنلاین: https://www.autodesk.it/products/3ds-max/overview (در 7 ژوئن 2022 قابل دسترسی است).
- داسو سیستم کتیا. در دسترس آنلاین: https://www.3ds.com/it/prodotti-e-servizi/catia/ (در 7 ژوئن 2022 قابل دسترسی است).
- سازمان بین المللی استاندارد سازی. سازماندهی و دیجیتالی کردن اطلاعات در مورد ساختمانها و کارهای مهندسی عمران، از جمله مدلسازی اطلاعات ساختمان (BIM)—مدیریت اطلاعات با استفاده از مدلسازی اطلاعات ساختمان ; سازمان بین المللی استانداردسازی: ژنو، سوئیس، 2019. [ Google Scholar ]
- دل گیودیس، ام. رویکرد DIM برای دوقلوهای دیجیتال. در کتابچه راهنمای تحقیق در مورد توسعه شهرهای هوشمند مبتنی بر دوقلوهای دیجیتال ; IGI Global: Hershey، PA، ایالات متحده آمریکا، 2021؛ صص 153-171. [ Google Scholar ]
- سوزا، ال. بوئنو، سی. مدل سازی اطلاعات شهر به عنوان یک ابزار تصمیم گیری پشتیبانی برای برنامه ریزی و مدیریت شهرها: مروری بر ادبیات سیستماتیک و تجزیه و تحلیل کتاب سنجی. ساختن. محیط زیست 2022 ، 207 ، 108403. [ Google Scholar ] [ CrossRef ]
- CityGML. در دسترس آنلاین: https://www.ogc.org/standards/citygml (در 7 ژوئن 2022 قابل دسترسی است).
- بیلجکی، اف. لدوکس، اچ. Stoter, J. مشخصات LOD بهبود یافته برای مدل های ساختمان سه بعدی. محاسبه کنید. محیط زیست سیستم شهری 2016 ، 59 ، 25-37. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- برگر، ام. تالیاساکی، آ. Seversky، LM; آلیز، پی. Guennebaud، G. لوین، جی. شرف، ع. سیلوا، سی تی بررسی بازسازی سطح از ابرهای نقطه ای. محاسبه کنید. نمودار. انجمن 2017 ، 36 ، 301–329. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- مشخصات پایه هایدمن، HK Lidar. در کتاب 11، گردآوری و ترسیم داده های مکانی . برنامه ملی زمین فضایی، ویرایش. سازمان زمین شناسی ایالات متحده: Reston، VA، ایالات متحده آمریکا، 2021; فصل 4. [ Google Scholar ]
- مشخصات LAS 1.4-R15. در دسترس آنلاین: https://www.asprs.org/wp-content/uploads/2019/07/LAS_1_4_r15.pdf (در 7 ژوئن 2022 قابل دسترسی است).
- مدل سه بعدی نیویورک. در دسترس آنلاین: https://www.asg.ed.tum.de/gis/projekte/new-york-city-3d/ (دسترسی در 7 ژوئن 2022).
- برلین 3D — پورتال دانلود. در دسترس آنلاین: https://www.businesslocationcenter.de/en/economic-atlas/download-portal (در 7 ژوئن 2022 قابل دسترسی است).
- عبدالله، AAA; محد نور، ن. عبدالله، ع. ساخت و مدلسازی مدل سه بعدی GIS در موتور شهر برای شهر سنتی مالایی. در مجموعه مقالات دومین کنفرانس بین المللی آینده آسه آن (ICoFA) 2017 — جلد 2 ; سایان، ر.، عباس، م.ع.، ویراستاران; Springer: سنگاپور، 2018; ص 285-293. [ Google Scholar ]
- آگیوس، تی. صبری، س. کلانتری، م. مدلسازی شهر مبتنی بر قوانین سه بعدی برای حمایت از فرآیند توسعه شهری. ISPRS Int. J. Geo-Inf. 2018 ، 7 ، 413. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- مشارکت کنندگان OpenStreetMap. تخلیه سیاره. در دسترس آنلاین: https://www.openstreetmap.org (در 7 ژوئن 2022 قابل دسترسی است).
- کازوبا، اس. Pellacini، F. بازسازی شهر سه بعدی از داده های OpenStreetMap. In Smart Tools and Apps for Graphics—Eurographics Chapter Conference ایتالیا ; Frosini, P., Giorgi, D., Melzi, S., Rodolà, E., Eds.; انجمن یوروگرافیک: مونیخ، آلمان، 2021. [ Google Scholar ] [ CrossRef ]
- لدوکس، اچ. بیلجکی، اف. دوکای، بی. کومار، ک. پیترز، آر. استوتر، جی. Commandeur, T. 3dfier: بازسازی خودکار مدل های سه بعدی شهر. J. نرم افزار منبع باز. 2021 ، 6 ، 2866. [ Google Scholar ] [ CrossRef ]
- صفحه ویکی OSM: برنامه های کاربردی سه بعدی. در دسترس آنلاین: https://wiki.openstreetmap.org/wiki/3D (در 7 ژوئن 2022 قابل دسترسی است).
- OpenDEM. در دسترس آنلاین: https://www.opendem.info/index.html (در 7 ژوئن 2022 قابل دسترسی است).
- Geoportale Basilicata: Catalogo Dati. در دسترس آنلاین: https://rsdi.regione.basilicata.it/Catalogo/srv/ita/search?hl=ita (در 7 ژوئن 2022 قابل دسترسی است).
- تیم توسعه QGIS. سیستم اطلاعات جغرافیایی QGIS در دسترس آنلاین: https://qgis.org/en/site/ (دسترسی در 7 ژوئن 2022).
- Shewchuk، JR Triangle: مهندسی یک ژنراتور مش با کیفیت دو بعدی و مثلثی Delaunay. در هندسه محاسباتی کاربردی: به سوی مهندسی هندسی ; یادداشت های سخنرانی در علوم کامپیوتر; Lin, MC, Manocha, D., Eds. Springer: برلین، آلمان، 1996; جلد 1148، ص 203-222، از اولین کارگاه ACM در مورد هندسه محاسباتی کاربردی. [ Google Scholar ]
- سهرا، س. سینگ، جی. Rai, H. تجزیه و تحلیل داده های OpenStreetMap برای خطاهای توپولوژیکی. بین المللی جی. اسپات. Multimed زمانی. Inf. سیستم 2016 ، 1 ، 87. [ Google Scholar ] [ CrossRef ]
- اسکالاس، آ. مورتارا، م. Spagnuolo، M. خط لوله ای برای آماده سازی مصنوعات که ماندگاری حاشیه نویسی را فراهم می کند. J. Cult. میراث. 2020 ، 41 ، 113-124. [ Google Scholar ] [ CrossRef ]
- Solpos: موقعیت و شدت خورشیدی NREL. در دسترس آنلاین: https://github.com/gurre/nrel-solpos-2.0 (دسترسی در 7 ژوئن 2022).
- جنتیله، سی. استکا، جی. مانچینی، اس. Suanno, M. کاربرد مسئله جهتیابی با پنجرههای زمانی برای برنامهریزی بازدیدها در طول رویدادهای اجتماعی. در مجموعه مقالات کنفرانس بین المللی مشترک EURO/ALIO 2018 درباره بهینه سازی ترکیبی کاربردی، بولونیا، ایتالیا، 25 تا 27 ژوئن 2018. [ Google Scholar ]
- دیز، م. سرانی، ع. کامپانا، ای. Stern، F. مدلسازی داده محور مانورهای کشتی در امواج از طریق تجزیه حالت دینامیک. arXiv 2021 ، arXiv:2105.13062. [ Google Scholar ]
- بندیکتیس، RD; Cesta, A. Lifted Heuristics for Timeline-based Planning. در مجموعه مقالات ECAI 2020 – بیست و چهارمین کنفرانس اروپایی در مورد هوش مصنوعی، سانتیاگو د کامپوستلا، اسپانیا، 29 اوت تا 8 سپتامبر 2020؛ از جمله دهمین کنفرانس کاربردهای معتبر هوش مصنوعی (PAIS 2020)؛ مرزها در هوش مصنوعی و کاربردها Giacomo, GD, Catalá, A., Dilkina, B., Milano, M., Barro, S., Bugarín, A., Lang, J., Eds. IOS Press: آمستردام، هلند، 2020؛ جلد 325، ص 2330–2337. [ Google Scholar ] [ CrossRef ]

شکل 1. پنج LODS ساختمان در CityGML (تصویر از [ 17 ]).
شکل 2. از چپ به راست: کسب LiDAR. ابر نقطه تولید شده؛ تصویر شطرنجی DTM (سطح خاکستری نشان دهنده ارتفاع)؛ سطوح DSM-DTM بازسازی شده
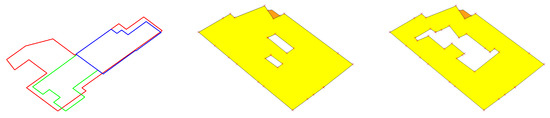
شکل 3. چند نمونه از مرزهای مشکل ساز در OSM: در سمت چپ چند ضلعی متقاطع. در مرکز و سمت راست، مرز داخلی به دو روش مختلف در همان رابطه چند ضلعی OSM تعریف شده است.

شکل 4. در سمت چپ : نمایی از شبکه DTM/DSM (مرتبط با پیکسل های فایل GeoTIFF) با مرزهای ساختمانی تحت تأثیر در ناحیه ساسی. همانطور که مشاهده می شود، اندازه شبکه سلولی برای تشخیص درست خیابان ها و تنوع بخشیدن به ساختمان های نزدیک بسیار بزرگ است، زیرا نقاط آنها در یک پیکسل قرار می گیرند. برای مثال، ارتفاع مربوط به ساختمانهای کوچک در نواحی برجستهشده بالا اغلب مشابه ساختمانهای مجاور خواهد بود. همین امر در مورد خیابانهایی مانند خیابانی که در ناحیه برجستهشده پایینتر قرار دارد نیز صدق میکند، جایی که اگر پایههای ساختمانهای مجاور تفاوتهای قابلتوجهی در ارتفاع داشته باشند، ممکن است تفاوتهای زیادی در ارتفاع نقاط تشکیلدهنده خیابان رخ دهد. در ( سمت راست ): چند کوچه از منطقه ساسی.
شکل 5. نتیجه قبل و بعد از اصلاح مدل سه بعدی.
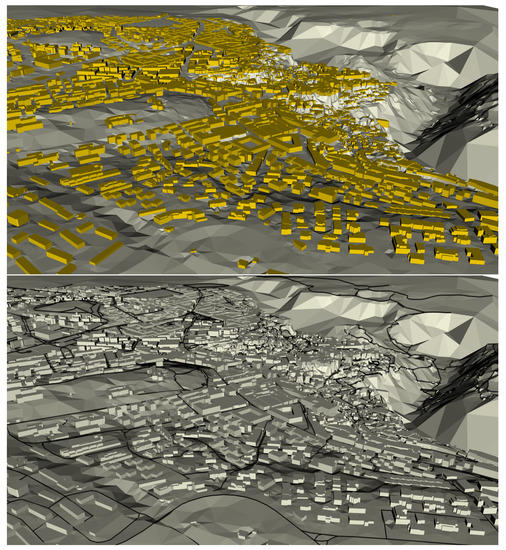
شکل 6. از بالا به پایین: مدل سه بعدی تصفیه شده با ساختمان ها و شبکه راه ها به ترتیب برجسته شده است.
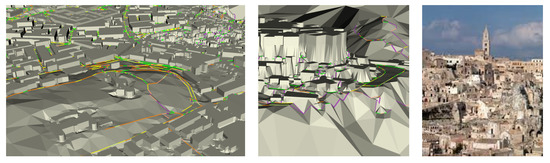
شکل 7. شبکه جاده بر اساس شیب محلی، در هر بخش نشان داده شده است (از سبز = شیب صفر تا قرمز = حداکثر شیب 30- درجه در این پیاده سازی؛ مقادیر بالاتر از این آستانه برای نشان دادن مقادیر غیر واقعی به رنگ بنفش تجسم می شوند). توجه داشته باشید که در ناحیه ساسی ( وسط )، محاسبات شیب بسیار پر سر و صداتر از ناحیه مدرن ( سمت چپ ) است، زیرا از وضوح کم با توجه به مورفولوژی پیچیده منطقه در حال تنزل به رودخانه ( سمت راست ) رنج میبرد. .

شکل 8. شبکه جاده با توجه به شیب متوسط (از سبز = شیب صفر تا قرمز = 30 درجه) به تصویر کشیده شده است. در اینجا نمایش صاف تر است زیرا یک قوس (بین دو شاخه) دارای مقدار شیب جمع است.
شکل 9. روشنایی خورشیدی در 15 اوت ( سمت چپ ) و 25 دسامبر ( راست ) در همان زمان (9:00 صبح) مورد انتظار است. در جزئیات، برخی از پرتوهای فرودی در محاسبات استفاده شده است.

شکل 10. نمونه ای از تجسم اطلاعات ارجاع جغرافیایی بیشتر از حسگرهای زمان واقعی: از سفید به قرمز، افزایش نرخ اشغال نقاط مورد علاقه.


بدون دیدگاه