

پلاگین ACYOTB در QGIS: ابزاری برای تصحیح صحیح در محیط های منبع باز
چکیده:
تصاویر ماهواره ای با وضوح بالا باید تحت یک فرآیند تصحیح هندسی قرار گیرند تا برای اهداف متریک استفاده شوند. این عملیات به نام orthorectification به دلیل تغییر شکل عمدتاً به دلیل اعوجاج دوربین و هندسه اکتساب ضروری است. برای تصحیح صحیح یک تصویر، لازم است که ویژگیهای اکتساب فتوگرامتری و موقعیت تصویر با توجه به یک سیستم مرجع متصل به زمین، با دقت بازسازی شود. این عملیات که جهتیابی نامیده میشود، میتواند با استفاده از مدلهای ریاضی مختلف مانند مدلهای دقیق، تابع چند جملهای گویا (RPF) و ضریب چند جملهای گویا، یا به گفته برخی از نویسندگان، مدلهای ضریب موقعیتیابی سریع (RPC) انجام شود. جهت یابی و راست یابی معمولاً در یک نرم افزار تجاری خاص انجام می شود، اما در QGIS، این عملیات پیچیده را می توان با استفاده از کتابخانه های باز جعبه ابزار Orfeo (OTB) انجام داد. متأسفانه دستورالعمل های ارائه شده توسط توسعه دهندگان OTB منجر به نتایج کمیاب می شود. در واقع، رویه پیشنهادی در OTB امکان بهره برداری کامل از پتانسیل مدل های RPC را که خود OTB بر آن استوار است، نمی دهد. از آنجایی که OTB یک نرم افزار منبع باز است، افزونه ای برای غلبه بر این محدودیت ها و بهره برداری کامل از پتانسیل آن توسعه یافته است. در واقع، متأسفانه رابط های OTB ضروری هستند و برخی از توابع ضروری وجود ندارند. بنابراین، یک پلاگین QGIS جدید به منظور اجرای کل فرآیند به بهترین شکل فتوگرامتری و آماری و در عین حال سادهسازی رویههای نسبی ایجاد شد. دستورالعمل های ارائه شده توسط توسعه دهندگان OTB منجر به نتایج کمیاب می شود. در واقع، رویه پیشنهادی در OTB امکان بهره برداری کامل از پتانسیل مدل های RPC را که خود OTB بر آن استوار است، نمی دهد. از آنجایی که OTB یک نرم افزار منبع باز است، افزونه ای برای غلبه بر این محدودیت ها و بهره برداری کامل از پتانسیل آن توسعه یافته است. در واقع، متأسفانه رابط های OTB ضروری هستند و برخی از توابع ضروری وجود ندارند. بنابراین، یک پلاگین QGIS جدید به منظور اجرای کل فرآیند به بهترین شکل فتوگرامتری و آماری و در عین حال سادهسازی رویههای نسبی ایجاد شد. دستورالعمل های ارائه شده توسط توسعه دهندگان OTB منجر به نتایج کمیاب می شود. در واقع، رویه پیشنهادی در OTB امکان بهره برداری کامل از پتانسیل مدل های RPC را که خود OTB بر آن استوار است، نمی دهد. از آنجایی که OTB یک نرم افزار منبع باز است، افزونه ای برای غلبه بر این محدودیت ها و بهره برداری کامل از پتانسیل آن توسعه یافته است. در واقع، متأسفانه رابط های OTB ضروری هستند و برخی از توابع ضروری وجود ندارند. بنابراین، یک پلاگین QGIS جدید به منظور اجرای کل فرآیند به بهترین شکل فتوگرامتری و آماری و در عین حال سادهسازی رویههای نسبی ایجاد شد. افزونه ای برای غلبه بر این محدودیت ها و بهره برداری کامل از پتانسیل آن توسعه یافته است. در واقع، متأسفانه رابط های OTB ضروری هستند و برخی از توابع ضروری وجود ندارند. بنابراین، یک پلاگین QGIS جدید به منظور اجرای کل فرآیند به بهترین شکل فتوگرامتری و آماری و در عین حال سادهسازی رویههای نسبی ایجاد شد. افزونه ای برای غلبه بر این محدودیت ها و بهره برداری کامل از پتانسیل آن توسعه یافته است. در واقع، متأسفانه رابط های OTB ضروری هستند و برخی از توابع ضروری وجود ندارند. بنابراین، یک پلاگین QGIS جدید به منظور اجرای کل فرآیند به بهترین شکل فتوگرامتری و آماری و در عین حال سادهسازی رویههای نسبی ایجاد شد.
کلمات کلیدی: QGIS ; جعبه ابزار Orfeo ; RPC _ دقت ؛ تصحیح صحیح ; QuickBird ; جزیره ایسکیا
1. مقدمه :
در بیست سال گذشته، در دسترس بودن تصاویر ماهواره ای با وضوح بالا و بسیار بالا، تحقیقات روش شناختی را برای تصحیح هندسی دقیق و جهت گیری خود تصاویر تحریک کرده است. این اصلاحات برای تصحیح صحیح تصویر ضروری هستند، عملیاتی که برای قرار دادن درست اشیاء نمایش داده شده لازم است. در حال حاضر، تثبیتشدهترین مدلهای اصلاحی مبتنی بر رویکرد فتوگرامتری دقیق یا ضریب موقعیتیابی سریع (RPC) است. این مدل ها تقریباً به طور انحصاری در نرم افزارهای تجاری متن بسته موجود هستند. امکان تصحیح در نرمافزار متنباز رایگان برای دنیای پژوهش برای انتشار مدیریت هندسی صحیح تصاویر ماهوارهای و مطالعه بهبودهای احتمالی در مدلهای موجود در حال حاضر ضروری است. ما احتمالات تصحیح هندسی ارائه شده توسط Orfeo Tool Box (OTB)، کتابخانه ای از الگوریتم های منبع باز پیاده سازی شده در نرم افزار GIS QGIS را مطالعه کردیم و بررسی کردیم که چگونه برخی از پارامترهای اولیه مدل RPC می توانند برای به دست آوردن بهبود یابند. نتایج برابر یا بهتر از نتایج نرم افزارهای تجاری است. این رویکرد در یک پلاگین QGIS جدید که به طور خاص توسط نویسندگان توسعه داده شده است پیاده سازی شده است و اجازه می دهد تا کل فرآیند از ورودی داده تا تخمین دقت واقعی نتایج انجام شود، که در حال حاضر امکان پذیر نیست. این مقاله بهبودهایی را که برای فرآیند تصحیح OTB پیشنهاد میکنیم، نحوه پیادهسازی آنها در پلاگین ما و اولین نتایج بهدستآمده را شرح میدهد.
2. مواد و روش ها
آزمایش حاضر از تأیید احتمالات ارائه شده توسط ماژول تصحیح راستگویی موجود در نرم افزار منبع باز OTB، یک کتابخانه باز برای پردازش و بسط تصاویر نوری و راداری [ 1 ، 2 ] آغاز شد. همه الگوریتمهای OTB از Monteverdi، QGIS و Python قابل دسترسی هستند و از طریق خط فرمان یا رابط گرافیکی در دسترس هستند. در این زمینه، عملکردهای OTB QGIS، هم خط فرمان و هم رابط های گرافیکی، بررسی شدند: اولی حتی برای کاربران با تجربه پیچیده تر است، در حالی که همه توابع در دومی در دسترس نیستند.
تصحیح تصاویر ماهواره ای با وضوح بالا به طور گسترده در ادبیات [ 3 ، 4 ] مورد بحث قرار گرفته است، و چندین مدل برای جهت گیری آنها توسعه داده شده است [ 5 ، 6 ، 7 ]. با این حال، در دسترس بودن تصاویر و مدل های جدید همیشه دلیلی برای تحقیق و توسعه بیشتر در جستجوی استراتژی های بهینه و کارآمد است [ 8 ، 9 ]. برخی از نرم افزارهای تجاری مدل های دقیق و معتبر علمی مانند مدل معروف Toutin [ 10 ] را پیاده سازی کرده اند.]، چنین نرم افزاری [ 11 ، 12 ] را به مرجعی برای آزمایش های اخیر انجام شده تبدیل می کند.
همین امر را نمی توان در مورد بسته های نرم افزاری منبع باز و رایگان برای تصحیح صحیح گفت: نرم افزار موجود کاربر پسند نیست و اغلب مستندات ضعیفی دارد. در بین این بسته ها، پیاده سازی OTB در محیط QGIS تا آخرین نسخه 3.x مورد توجه ویژه است.
OTB بر روی Insight Toolkit (ITK) ساخته شده است، یک کتابخانه ++C که برای پردازش تصویر توسعه یافته است، و فرمتهای شطرنجی و برداری را که توسط کتابخانه GDAL پشتیبانی میشود، مدیریت میکند، که برای خواندن/نوشتن دادهها بر آن تکیه میکند. در مورد مدلسازی حسگر و خواندن فراداده، بر اساس کتابخانه OSSIM است و در حال حاضر از ماهوارههای Sentinel، Pléiades، SPOT6، SPOT5 و Digital Globe پشتیبانی میکند. OTB در نصب مستقل QGIS برای ویندوز گنجانده شده است، اما باید به درستی فعال و پیکربندی شود و پوشه ای که کتابخانه در آن نصب شده است را مشخص کند.
پس از نصب صحیح، برنامه های OTB می توانند مستقیماً از پانل جعبه ابزار پردازش QGIS دسترسی داشته باشند و تعداد زیادی عملکرد مفید برای پردازش تصاویر سنجش از راه دور، از پیش پردازش گرفته تا تجزیه و تحلیل با کارایی بالا مانند تصحیح راستگویی، بهبود مدل حسگر، تقسیم بندی ارائه می کنند. ، کالیبراسیون رادیومتریک، همجوشی تصویر، شارپنینگ و استخراج عنصر. برخی از توابع، اما متأسفانه نه همه، با یک رابط گرافیکی بصری در دسترس هستند، ورودی داده ها و پارامترهای ورودی را ساده می کند، حتی برای کاربران کمتر با تجربه، که همچنین می توانند از مزایای QGIS برای ویرایش، نمایش و مقایسه فرمت های داده های مختلف (هم شطرنجی و هم با هم استفاده کنند). بردار). به عنوان جایگزینی برای استفاده ترکیبی از QGIS و OTB، دومی همراه با Monteverdi، یک نمایشگر تصویر ماهواره ای است که امکان دسترسی سریع به عملکردهای OTB را فراهم می کند.
متعاقباً، علیرغم آگاهی از کاربرد صحیح مدلهای فتوگرامتری در OTB، امکان بهبود قابل توجه پتانسیل این روش را هم از نظر ساده رابط کاربری آن و هم از نظر فتوگرامتری و آماری مورد تجزیه و تحلیل قرار دادیم. سختگیری عملیات
در واقع، OTB در QGIS در حال حاضر اجازه ورود دقیق ارتفاعات اندازه گیری شده نقطه کنترل زمینی (GCP) را نمی دهد، که همیشه در هنگام اندازه گیری نقاط توسط گیرنده های GPS دیفرانسیل در دسترس هستند.
در حال حاضر، ارتفاع GCP در OTB به طور اجباری بر روی یک مدل ارتفاعی دیجیتال (DEM) تخمین زده میشود. در صورتی که هیچ DEM در دسترس کاربر نباشد، از DEM توپوگرافی رادار شاتل (SRTM) استفاده می شود. به گفته برخی از نویسندگان، SRTM DEM [ 13 ] تا 10 متر نامتعیین دارد. علاوه بر این، OTB فقط ارتفاعات بیضوی را پردازش می کند، بنابراین SRTM DEM باید توسط مدل زمین شناسی EGM96 تصحیح شود، که باعث عدم تعیین بیشتر ترتیب متریک می شود.
از آنجایی که OTB قادر به تصحیح تصاویر با وضوح زمین دسیمتریک (مانند QuickBird مورد استفاده در این آزمایش) است، واضح است که تقریب های متریک روی مختصات GCP های ورودی نمی تواند نتایج بهینه ای ارائه دهد. علاوه بر این، در OTB، در حال حاضر فقط میتوان GCPها را وارد کرد، اما نقاط چک (CPs) را نمیتوان درج کرد، که به ما اجازه میدهد فقط دقت را تخمین بزنیم، اما نه دقت را همانطور که معمولاً در آمار تعریف میشود.
پس از توضیح سریع آزمایشها، محدودیتهای روش فعلی به تفصیل توضیح داده میشوند و سپس راهحلهای ممکن با افزونه پیشنهادی نشان داده میشوند. در نهایت، نتایج آزمایش با استفاده از OTB با و بدون پلاگین با جزئیات نشان داده شده و با نتایج به دست آمده از طریق استفاده از نرم افزار تجاری در حالت سختگیرانه و RPC مقایسه شده است.
2.1. مدل های جهت گیری
تصاویر هوایی و ماهواره ای قبل از استفاده برای کاربردهای فتوگرامتری مانند ارتورکتیفیک و بازیابی استریوسکوپی باید جهت دهی شوند [ 14 ، 15 ].
به طور خاص، برای تصحیح تصاویر ماهوارهای، که موضوع این تحقیق است، پرکاربردترین الگوریتمها بر اساس دو رویکرد کاملاً متفاوت، که عموماً بهعنوان مدلهای دقیق و RPC تعریف میشوند، است.
مدلهای دقیق بر اساس معادلات همخطی (رویکرد فتوگرامتری) هستند و کسب تصاویر را با در نظر گرفتن ویژگیهای هندسی و حسگر توصیف میکنند. بازسازی بخش مداری در طول گرفتن تصویر با مطالعه حالت اکتساب، ویژگی های حسگر، موقعیت ماهواره و نگرش به دست می آید. اگرچه مدل دقیق در این مطالعه آزمایش نشد، از آنجایی که به نظر نمی رسد OTB آن را با تصاویر QuickBird پشتیبانی کند، توصیف مختصر ویژگی های آن در ضمیمه A بسیار مهم در نظر گرفته شد .
نوع متفاوتی از مدلهای جهتیابی، توابع چند جملهای گویا (RPF) یا RPF با RPC هستند. این نوع مدلها کاملاً مستقل از ویژگیهای فیزیکی و هندسی تصویر هستند. پارامترهای آنها را میتوان مستقیماً توسط GCPها با استفاده از برآورد حداقل مربعات (RPF) تخمین زد یا پیشینی توسط ارائهدهنده ماهواره تخمین زد، در این صورت مدل به طور کلی به عنوان RPC تعریف میشود.
در مورد RPF، تا 30 GCP به طور یکنواخت در کل تصویر مورد نیاز است. با RPF، در صورت مقایسه با RPC و مدل دقیق، می توان دقت کمی را به دست آورد. به همین دلیل، مدل های RPF محاسبه شده بر روی GCP ها اکنون به ندرت مورد استفاده قرار می گیرند. در مقابل، مدلهای RPF مبتنی بر RPC (که معمولاً به آنها مدلهای RPC یا RPC گفته میشود) میتوانند تصویر را حتی با GCPهای بسیار کمی و با دقت نهایی نزدیک به مدلهای دقیق جهتدهی کنند.
برخلاف آنچه معمولاً در ادبیات گزارش میشود [ 5 ، 6 ]، در بحث نشان میدهیم که در این آزمون خاص، الگوریتمهای RPC نتایج کمی بهتر از الگوریتمهای مدل دقیق توتین به دست آوردند. به همین دلیل، به نظر می رسد که برای درک اهمیت آماری این نتایج خاص، آزمایش های بیشتری باید انجام شود.
هر دو در مدلهای RPF و RPC، مختصات جسم (طول جغرافیایی، طول و ارتفاع بیضی) یک نقطه، توابعی از مختصات پیکسلی (I, J) با استفاده از نسبتهای عبارات چند جملهای هستند:
که در آن a j , b j , c j , d j ضرایب هستند. φ عرض جغرافیایی است. λ طول جغرافیایی است. h ارتفاع بیضی شکل است. I ستون پیکسل در فایل شطرنجی است. و J ردیف است.
ترتیب RPF معمولاً کمتر یا مساوی 3 است، زیرا مرتبه بالاتر نتایج را به طور قابل ملاحظه ای بهبود نمی بخشد و به تعداد بسیار زیادی GCP نیاز دارد. به طور خاص، آژانس ملی تصویربرداری و نقشه برداری (NIMA) استانداردسازی برای RPC موجود در اسناد خاص تعریف کرده است، که در آن ترتیب چندجمله ای ها روی 3 ثابت شده است، همه مختصات (تصویر و زمین) در محدوده [+1; −1]، با استفاده از پارامترهای عادی سازی موجود در فایل ابرداده. مقادیر عادی به جای واقعی به منظور به حداقل رساندن معرفی خطاها در طول محاسبات استفاده می شود [ 16 ].
تعداد RPC ها بدیهی است که به ترتیب چند جمله ای بستگی دارد، به طوری که برای مرتبه سوم، حداکثر تعداد ضرایب 80 است (20 برای هر چند جمله ای)، اما به 78 کاهش می یابد زیرا هر معادله بر عبارات مرتبه صفر تقسیم می شود. مخرج ها در کتابخانه های معروف GDAL، تبدیل مستقیم (1) و تبدیل معکوس در دسترس هستند، که در آن اولی مختصات تصویر (I, J) را به عنوان تابعی از مختصات سه بعدی روی زمین بیان می کند و دومی مختصات سه بعدی روی زمین را به صورت بیان می کند. تابعی از مختصات تصویر (I, J). هر دو تبدیل مستقیم و معکوس ارتفاع بیضی نقاط باید ارائه شود [ 17 ].
نتایج جهتگیری بهدستآمده با RPC معمولاً با ارائه یک تبدیل مرتبه اول 6 پارامتری در معادله RPF اصلاح میشوند:
که در آن شش پارامتر (A0، A1، A2، B0، B1، و B2) با استفاده از مجموعه ای از چند GCP برآورد می شوند [ 18 ، 19 ، 20 ، 21 ].
ما مشاهده کردیم که OTB در عوض از ترجمه چرخشی 5 پارامتری [ 22 ] برای اصلاح نتایج RPC استفاده می کند:
این احتمالاً نتایج متفاوتی را که با استفاده از دو محصول نرم افزاری به دست آمده است توضیح می دهد که در زیر به تفصیل نشان داده شده است.
در حال حاضر، OTB از مدلهای RPC برای اکثر تصاویر ماهوارهای با وضوح بالا پشتیبانی میکند، در حالی که، به گفته توسعهدهندگان، «مدل دقیقتری برای SPOT 5 و Sentinel در دسترس است» [ 23 ]. با استفاده از تصویر QuickBird در این آزمایش، ما مجبور به استفاده از مدل RPC در نرم افزار OTB شدیم. با وجود این، جزئیات مدل دقیق در ضمیمه A گزارش شده است، زیرا مهم است که دقیقاً معنای “مدل دقیق” را بر اساس رویکرد فتوگرامتری تعریف کنیم، و آشفتگی در مورد موضوعی را که گاهی اوقات در ادبیات پیدا میشود روشن میکند.
دقت محصول نهایی به شدت به ویژگی های تصویر اصلی، کیفیت مختصات اندازه گیری شده نقاط کنترل زمین و مدل انتخاب شده برای انجام جهت گیری بستگی دارد.
در حال حاضر، پرکاربردترین روش برای بررسی دقت و صحت مدلهای جهتگیری، تحلیل باقیمانده است که بر اساس نقاط زمین شناخته شده است که به دو مجموعه تقسیم میشوند: اولی در مدل جهتگیری (GCPs) استفاده میشود و به تخمین دقت مدل; دومی برای اعتبارسنجی عملکرد خود مدل (CPs) و برای تعریف دقت نهایی محصول از طریق ریشه میانگین مربعات خطا (RMSE) باقیماندههای CP استفاده میشود [ 5 ، 10 ].
تجزیه و تحلیل باقیمانده با مقایسه مختصات تصویر نقاط زمینی که روی تصویر با مختصات تصویر محاسبه شده از طریق معادلات مدل و مختصات بررسی شده محاسبه می شود، انجام می شود.
2.2. آزمایش کنید
این آزمایش بر اساس مطالعه یک تصویر پانکروماتیک منتشر شده توسط پلت فرم QuickBird (0.7 متر فاصله زمینی ساده (GSD)) متعلق به دسته استاندارد آماده ارتو است که قبلا هم از نظر رادیومتری و هم از نظر هندسی تصحیح شده بود و همچنین حاوی یک دگرگونی جغرافیایی تقریبی بود. که تخمین سریعی از مکان تصویر موجود در فایل “IMD” و همچنین در پارامترهای RPC در فایل “.RPB” ارائه میدهد.
25 نقطه زمینی در دسترس وجود داشت، اما چهار مورد از آنها دور انداخته شدند زیرا به طور یکسان روی تصویر قابل تشخیص نبودند ( شکل 1 ). همه آنها ابتدا به عنوان GCP مورد استفاده قرار گرفتند، زیرا همانطور که قبلاً توضیح داده شد، OTB در حال حاضر استفاده از CP ها را نمی دهد. همه نقاط با یک گیرنده GPS/GNSS دو فرکانس اندازهگیری شدند و در پس پردازش متمایز شدند و به ایستگاه دائمی ISCH (مثلث زرد در شکل 1 )، با طول خط پایه همیشه کمتر از 6 کیلومتر و دقت سانتیمتری متعاقبا برای موقعیت سهبعدی ارجاع شدند. . برای هر نقطه اندازه گیری شده، یک سند تک نگاری توصیفی ایجاد شد تا شناسایی بعدی آنها برای مطالعات بعدی قطعی تر شود. نمونه ای از تک نگاری در آورده شده است ضمیمه B.
تصحیح تصاویر ماهواره ای در OTB مستلزم وجود سه کاربرد مستقل است. اولین مورد، ReadImageInfo ، اجازه میدهد تا فراداده تصویر و مدل حسگر خوانده شود و آنها را در یک فایل متنی بنویسد که به ورودی برنامه بعدی تبدیل میشود. دومی، RefineSensorModel، مدل حسگر را با استفاده از مجموعهای از GCPها با محاسبه پنج پارامتر روتوترجمه دو مقیاسی که به یک فایل متنی جدید صادر میشوند، تنظیم میکند. سومی به عنوان ورودی، علاوه بر تصویر خام ماهواره ای و مدل دیجیتالی زمین، در مرحله سوم و آخر، OrthoRectification استفاده می شود.
OTB میتواند با استفاده از مدلهای فتوگرامتری مختلف از جمله مدل «دقیقتر» اصلاح کند [ 23 ]. در اینجا، آزمایش بر روی مدل RPC متمرکز شد که در حال حاضر تنها مدل موجود برای تصاویر QuickBird است.
2.2.1. اطلاعات تصویر را بخوانید
دستور otbgui_ReadImageInfo یک رابط گرافیکی برای خواندن فراداده تصویر موجود در فایل .IMD فراهم می کند. این دستور به طور همزمان حتی اطلاعات موقعیت تقریبی خود تصویر را می خواند. با علامت زدن گزینه ” Write the OSSIM keywordlist to a geom file “، برنامه اجازه می دهد تا یک فایل متنی “.geom” حاوی اطلاعات صادر شود.
سنسورهای پشتیبانی شده در حال حاضر GeoEye، Ikonos، Pleiades، QuickBird، RadarSat، Sentinel-1، SPOT5 (فرمت TIF) هستند. همانطور که قبلا ذکر شد، طبق گفته توسعه دهندگان، تنها برای دو ماهواره آخر یک مدل “دقیق تر” موجود است. دقیقاً مشخص نیست که معنای مدل «دقیقتر» چیست، زیرا مدلهای جهتگیری در فتوگرامتری را میتوان به سختگیرانه (مثلاً مدل Toutin) و نه دقیق (مانند مدلهای RPC و RPF) تقسیم کرد. برای اهداف اصلاحی، OTB به یک مدل حسگر برای بازپخش تصویر نیاز دارد: اگر حسگرها پشتیبانی نمیشوند، یا برنامه هیچ مدل RPC را تشخیص نمیدهد، otbgui_GenerateRPCSensorModelدستور یک مدل حسگر RPC را از لیستی از GCP ها با استفاده از رویکرد RPF تولید می کند. حداقل 20 امتیاز برای تخمین بدون DEM و 40 امتیاز برای تخمین با پشتیبانی ارتفاع مورد نیاز است. این تابع، که در واقع یک مدل RPF است، در اینجا آزمایش نشد زیرا RPF نتایج ضعیفی در آزمایشهای قبلی ارائه کرد [ 10 ].
2.2.2. RefineSensorModel
Command RefineSensorModel فایل متنی “.geom” صادر شده قبلی و یک فایل متنی حاوی لیستی از GCPها را به عنوان اطلاعات ورودی می خواند و تنظیمات حداقل مربعات پارامترهای مدل سنسور را به عنوان خروجی ارائه می دهد. این نرم افزار اجازه می دهد تا یک فایل متنی .geom جدید که حاوی پنج پارامتر تبدیل زیر است صادر شود:
-
intrack_offset،
-
crtrack_offset،
-
intrack_scale،
-
crtrack_scale و
-
map_rotation
2.2.3. دانلودSRTMTiles
اگر کاربر DEM دقیقی از منطقه نداشته باشد، نرم افزار با استفاده از برنامه otbgui_DownloadSRTMTiles، که امکان دانلود کاشی های SRTM مناسب را که ناحیه مورد نظر را پوشش می دهد، با دقت ضعیف، امکان تصحیح قاعده را می دهد ( شکل 2 ). کاشی های SRTM از وب سایت USGS SRTM3 دانلود شدند [ 24 ]
این برنامه نسخه 2.1 DEM STRM را با وضوح 90 متر دانلود می کند. از آنجایی که این DEM تا 10 متر نامشخص است، همانطور که قبلا ذکر شد، برای اکثر آزمایش ها و برنامه های کاربردی با تصاویر با وضوح بالا و بسیار بالا نامناسب است. این DEM برای تأیید اینکه چقدر استفاده از افزونه نتایج اولیه را بهبود می بخشد آزمایش شد. اولین راستیآزماییها بلافاصله نتایج رضایتبخشی را نشان دادند، زیرا به اندازه کافی دقیق نبودند و به دلیل وجود چندین مقدار خالی (پیکسلهای سفید در شکل 2 )، عمدتاً در منطقه خط ساحلی. این نارساییهای مدل رقومی ارتفاع نیز بر روند اصلاح خط تأثیر میگذارد. در واقع، ارتفتو بهدستآمده ناپیوستگیهایی را نشان داد، همانطور که در شکل 3 مشاهده میشود. به همین دلیل، در آزمایشهای راستسنجی زیر، یک DEM بهدستآمده از درونیابی یک نقشه کانتور در مقیاس 1:5000 استفاده شد. اندازه سلول پلانیمتری 2 متر بر روی شبکه نهایی اعمال شد.
2.2.4. OrthoRectification
این برنامه به محصول نهایی تصحیح شده اجازه می دهد تا به دست آید (یعنی تصحیح تصویر سنجش از راه دور از تغییر شکل هایی که در مرحله اکتساب رخ داده است. Command otgui_OrthoRectificationیک رابط گرافیکی را باز می کند که اجازه می دهد این فرآیند سفارشی شود. در آزمایش، همانطور که در بالا ذکر شد، با یک تصویر QuickBird Ortho-Ready (یعنی تصویری با اطلاعات ارجاع جغرافیایی) سروکار داشتیم. برای یک محصول Ortho-Ready Standard، طبق مستندات OTB، نرم افزار باید مجبور شود اطلاعات مکان تقریبی را حذف کند، مسیر تصویر را در فایل ورودی وارد کند و پس از آن پسوند ?&skipcarto=true را وارد کند. یک محدودیت دیگر این است که OTB را وادار کنیم تا مدل حسگر تصفیه شده را از طریق برنامه RefineSensorModel بخواند، کلید &geom= خاص را به مسیر تصویر ورودی اضافه کرده و به دنبال آن مسیر فایل refine.geom را اضافه کنید ( شکل 4 ).
3. نتایج و بحث
3.1. محدودیت های فعلی OTB
OTB در حال حاضر تابعی برای تطبیق و مدیریت GCPها و CPها ندارد، بنابراین در این آزمایش، GCPها در georeferencer QGIS همسوسازی شدند، اما مختصات تصویر مطابق با قرارداد OTB بیان نشد. سپس لازم بود قسمت اول افزونه برای تبدیل بیشتر مختصات تصویر توسعه یابد.
علاوه بر این، در OTB، همانطور که قبلاً چندین بار اشاره شد، نمی توان مقدار ارتفاع نقاط را که به طور خودکار از DEM بارگذاری شده در OTB با استفاده از مسیر پوشه حاوی آن به دست می آید، وارد کرد. از آنجایی که فقط می توان مسیر پوشه را مشخص کرد و نه نام فایل DEM، توصیه می شود برای جلوگیری از خطاهای خواندن، یک فایل را در پوشه وارد کنید. علاوه بر این، OTB تمام محاسبات را با ارتفاع بیضی انجام می دهد. به همین دلیل، در صورت استفاده از DEM ارتومتریک، مدل Geoid نیز مورد نیاز است. اگر به اشتباه، یک فایل DEM و Geoid بیضی با هم معرفی شوند، به هر حال موجی اضافه می شود که نتایج نامتجانس ارائه می دهد.
عدم امکان تخصیص یک ارتفاع بررسی شده به هر نقطه زمین نشان دهنده یک خطای جدی OTB در فرآیند اصلاح خط است زیرا اجازه نمی دهد از دقت بالای مختصات نقاط کنترل زمینی به دست آمده با یک بررسی GPS/GNSS بهره برداری شود. مختصات با دقت بالا برای به دست آوردن دقت متریک مناسب از تصاویر با وضوح بالا و بسیار بالا ضروری است. در حال حاضر، این ناراحتی را میتوان بهطور مصنوعی با ایجاد «DEM Service» ( شکل 5 ) از درونیابی ارتفاعات GCP دور زد. بدیهی است که این DEM فقط برای این منظور قابل استفاده است زیرا با دور شدن از GCPها، ارتفاعات کاملاً دلخواه می شوند.
علاوه بر این، نقص دیگر OTB عدم توانایی آن در انتخاب نوع نقاط همسو شده به عنوان نقطه کنترل یا کنترل زمینی است، به طوری که همه آنها GCP در نظر گرفته شده و در تخمین مدل استفاده می شوند. به همین دلیل نمی توان دقت محصول نهایی را دقیقاً تخمین زد، بلکه فقط دقت مدل جهت گیری را می توان برآورد کرد. دومی معمولاً مقادیر کمتری نسبت به دقت واقعی نشان میدهد، به طوری که اشتباه گرفتن این دو میتواند منجر به برآورد بیش از حد دقت واقعی شود.
به همین دلیل، نتایج نشاندادهشده بهعنوان «دقت» در RefineSensorModel ( شکل 6 ) به نظر میرسد که دقت مدل بیشتر از دقت باشد، که بهشدت بر اساس پذیرفتهشدهترین تعریف تعریف شده است [ 25 ، 26 ].
3.2. پلاگین ACYOTB Accuracy Estimation for OTB
به منظور تسهیل عملیات تصحیح و برای تخمین دقت واقعی، یک پلاگین QGIS پیاده سازی شد ( شکل 7 ). اول، این افزونه می تواند مستقیماً با georeferencer QGIS ارتباط برقرار کند. بنابراین می توان مستقیماً نقاط درون خود QGIS را با هم ترکیب کرد.
OTB فقط می تواند مختصات جغرافیایی و نه مختصات پیش بینی شده را مدیریت کند. پلاگین ACYOTB این مشکل را حل می کند زیرا می تواند هر دو را مدیریت کند. برای هر تبدیل بین پیش بینی های مختلف، ACYOTB از کتابخانه اثبات شده PROJ.4 [ 27 ] استفاده می کند.
بحرانی OTB که قبلاً توضیح داده شد مربوط به اطلاعات ارتفاع GCP، که فقط از طریق یک DEM درج شده است، به گروه توسعه OTB گزارش شده است. در انتظار توسعه احتمالی OTB برای رفع این اشکال، پلاگین ACYOTB با ایجاد یک “سرویس DEM” تنها با استفاده از مختصات سه بعدی GCP های GPS، مشکل را دور می زند ( شکل 5 ). سرویس DEM از طریق الگوریتم وزن فاصله معکوس کلاسیک (IDW) با استفاده از ارتفاعات مشتق شده از GPS درون یابی می شود و در یک فهرست موقت خاص ذخیره می شود. این DEM توسط افزونه فقط برای تخمین ارتفاع GCP استفاده شد. برای مرحله نهایی اصلاح، باید از یک DEM متفاوت استفاده شود.
به منظور بررسی اینکه آیا درونیابی DEM سرویس کیفیت ارتفاع GCP را کاهش می دهد، مقادیر GPS اصلی ارتفاعات با مقادیر قابل خواندن در DEM سرویس مقایسه شد. تجزیه و تحلیل نشان داد که تنها در یک نقطه اختلاف 1 میلی متر و در سایر نقاط کمتر از 1 میلی متر بود ( جدول A2 ). با توجه به اینکه دقت ارتفاع بررسیهای GNSS/GPS تنها چند سانتیمتر است، خطا همیشه ناچیز در نظر گرفته میشود.
این افزونه همچنین امکان تخمین دقت مدل جهت گیری را با در نظر گرفتن یک رویه دقیق بر اساس CP ها فراهم می کند. به این ترتیب، امکان حل یک خطای دیگر OTB وجود داشت که در حال حاضر اجازه نمی دهد CP ها درج شوند، فقط GCP ها (نقاط زمینی که برای اصلاح مدل سنسور استفاده می شوند).
CP ها مجموعه ای از نقاط زمین مستقل از GCP هستند و می توان از آنها برای تخمین دقت واقعی نتایج نهایی بر حسب انحراف از مقادیر اندازه گیری شده در زمین استفاده کرد. ( شکل 8 ).
برای تخمین باقیماندهها روی CPها، لازم است مختصات پیشبینیشده خود CPها محاسبه شوند. باقیمانده ها در واقع با مقایسه مختصات اندازه گیری شده (مثلاً با GPS) و مختصات پیش بینی شده مربوطه برآورد می شوند. OTB این محاسبه را انجام می دهد، اما فقط روی GCP ها، بنابراین لازم است تخمین برای CP ها تکرار شود.
این فرآیند در دو مرحله انجام میشود: اول، مختصات تصویر با استفاده از تبدیلهای واقعی RPC به مختصات زمین تبدیل میشوند. این عملیات با استفاده از توابع مناسب کتابخانه های GDAL انجام می شود. این توابع طبق مشخصات تعریف شده توسط NIMA، RPCها را مستقیماً از هدر فایل tiff تصویر خام که حاوی آنها است، می خوانند. با استفاده از RPC های تصویر خام، آنها اجازه می دهند مختصات زمین هر نقطه از تصویر دوباره محاسبه شود. این مرحله اول امکان محاسبه مجدد مختصات نقاط مختلف را با بایاس فراهم می کند که می تواند با ترجمه چرخشی کل تصویر مدل شود. این ترجمه چرخشی ضروری است زیرا RPC ها توسط مالک ماهواره تنها با داده های مداری تخمین زده می شوند. برای رسیدن به دقت دستور فاصله نمونه از زمین (GSD)، لازم است اصلاحاتی بر اساس برخی نکات اساسی انجام شود. به همین دلیل، مختصات نقاط بهدستآمده با RPCها سپس با یک روتوترجمه تخمینی تنظیم حداقل مربعات پالایش میشوند. روتوترجمه فقط بر روی GCPها تخمین زده میشود و پارامترهای روتوترجمه بهدستآمده باید برای تخمین دقت در CPها اعمال شوند. پلاگین ACYOTB از توابع GDAL برای مرحله اول استفاده میکند و سپس از یک روال توسعهیافته ویژه برای تخمین تبدیل پنج پارامتر استفاده میکند، که از مختصات GCPها در قیاس با آنچه OTB انجام میدهد شروع میشود. و پارامترهای روتوترجمه بهدستآمده باید برای تخمین دقت در CPها اعمال شوند. پلاگین ACYOTB از توابع GDAL برای مرحله اول استفاده میکند و سپس از یک روال توسعهیافته ویژه برای تخمین تبدیل پنج پارامتر استفاده میکند، که از مختصات GCPها در قیاس با آنچه OTB انجام میدهد شروع میشود. و پارامترهای روتوترجمه بهدستآمده باید برای تخمین دقت در CPها اعمال شوند. پلاگین ACYOTB از توابع GDAL برای مرحله اول استفاده میکند و سپس از یک روال توسعهیافته ویژه برای تخمین تبدیل پنج پارامتر استفاده میکند، که از مختصات GCPها در قیاس با آنچه OTB انجام میدهد شروع میشود.
فرض بر این است که انواع دیگر نرم افزارها مانند PCI، تبدیل را به همان روش انجام می دهند، احتمالاً با استفاده از توابع مشابه برای RPC. نتایج متفاوت بین PCI و OTB با افزونه ممکن است به این دلیل باشد که PCI از ترجمه چرخشی شش پارامتری استفاده می کند. با این حال، از آنجایی که PCI یک نرم افزار تجاری بسته است، این تنها یک فرضیه است.
3.3. نتایج تست پلاگین
برای تأیید کامل نتایجی که می توان با افزونه به دست آورد، یک سری آزمایش با استفاده از همان تصویر و مجموعه داده یکسان انجام دادیم تا از تکرارپذیری آزمایش ها اطمینان حاصل کنیم. ابتدا، یک سری آزمایش با استفاده از تمام 21 نقطه اندازه گیری شده با GPS به عنوان GCP انجام شد. این سری از آزمون ها برای ارزیابی دقت مدل های مختلف استفاده شد. تجزیه و تحلیل باقیمانده با مقایسه مختصات تصویر از نقطه زمین همسان شده بر روی تصویر، با مختصات تصویر محاسبه شده از طریق معادلات مدل و مختصات بررسی شده انجام شد. به طور خاص، نقاط مشابه به عنوان GCP در OTB با استفاده از ارتفاعات مختلف استفاده شد: ارتفاعات استخراج شده از SRTM DEM با مدل Geoid EGM96 تصحیح شد، و ارتفاعات به دست آمده از DEM از 1 استخراج شد: 5000 نقشه کانتور و ارتفاعات اندازه گیری شده (با GPS). همان نقاط GPS در نرم افزار تجاری معتبر PCI Geomatica 2018 (PCI) استفاده شد. در این نرم افزار، باقیمانده های 21 GCP با استفاده از هر دو مدل RPC و مدل دقیق Toutin برآورد شد. این آخرین آزمایش برای مقایسه با مدلی انجام شد که در ادبیات به عنوان نماینده وضعیت هنر برای تصاویر ماهوارهای با وضوح بالا و بسیار بالا در نظر گرفته میشود. میانگین باقیمانده های محاسبه شده به طور جداگانه روی 21 GCP برای مؤلفه های «در سراسر» و «در امتداد مسیر» (به ترتیب جزء x و y) در نشان داده شده است. این آخرین آزمایش برای مقایسه با مدلی انجام شد که در ادبیات به عنوان نماینده وضعیت هنر برای تصاویر ماهوارهای با وضوح بالا و بسیار بالا در نظر گرفته میشود. میانگین باقیمانده های محاسبه شده به طور جداگانه روی 21 GCP برای مؤلفه های «در سراسر» و «در امتداد مسیر» (به ترتیب جزء x و y) در نشان داده شده است. این آخرین آزمایش برای مقایسه با مدلی انجام شد که در ادبیات به عنوان نماینده وضعیت هنر برای تصاویر ماهوارهای با وضوح بالا و بسیار بالا در نظر گرفته میشود. میانگین باقیمانده های محاسبه شده به طور جداگانه روی 21 GCP برای مؤلفه های «در سراسر» و «در امتداد مسیر» (به ترتیب جزء x و y) در نشان داده شده است. جدول 1 ، در حالی که مقادیر محاسبه شده در هر نقطه در جدول کامل در پیوست C نشان داده شده است.
علامت DEM استفاده شده برای تصحیح نهایی در اینجا فقط برای وضوح بیشتر نشان داده شده است. در واقع، تصحیح واقعی در این مرحله هنوز انجام نشده است. در این راستا، استفاده از یک DEM نادرست (مانند SRTM) در مرحله تصحیح نهایی منجر به بدتر شدن بیشتر نتایج در مقایسه با نتایج ضعیف گزارش شده در جدول 1 و جدول 2 شد.. دقت نتایج بهدستآمده با پلاگین، اگر با نتایج مربوط به PCI محاسبهشده با RPC و مدل دقیق مقایسه شود، کاملاً معادل است (در مورد آخر در یک جزء کمی بهتر است). از این نتایج اولیه، دقت مدل OTB در مقایسه با مدل دقیق PCI، حتی بین اجزای “در سراسر مسیر” و “در امتداد مسیر” متعادل تر به نظر می رسد. برای تأیید این رفتار، آزمایشهای بیشتری با انواع مختلف تصویر ضروری است.
مقایسه بین نتایج بهدستآمده با در نظر گرفتن OTB با (ستون “OTB + پلاگین RPC”) و بدون پلاگین (ستون “OTB RPC/h از نقشه” و “OTB RPC/h از SRTM + geoid مدل EGM96”) باقیمانده واضح را برجسته میکند. بهبود با استفاده از افزونه، به ویژه در مقایسه با ارتفاعات SRTM DEM اصلاح شده با EGM96.
پس از آن، برای ارزیابی دقت واقعی نتایج نهایی، 10 امتیاز از 21 امتیاز فقط به عنوان CP استفاده شد. بنابراین، آنها برای برآورد حداقل مربعات پارامترهای جهت گیری استفاده نشدند. همانطور که در شکل 1 مشاهده می شود ده نقطه به طور یکنواخت در سطح منطقه توزیع شده است .
همانطور که قبلاً برای تخمین دقیق انجام شد، آزمایشها با استفاده از نقاط مشابه با مدلهای مختلف تکرار شدند: PCI دقیق، PCI RPC و OTB RPC. در این مورد، مدل OTB RPC نیز با ارتفاعهای GPS، ارتفاعات DEM از نقشه کانتور 1:5000 و ارتفاعات SRTM + EGM96 آزمایش شد تا با استفاده از افزونه، پیشرفتهای OTB را تأیید کند. میانگین نتایج را می توان در جدول 2 مشاهده کرد، در حالی که نتایج کامل برای هر نقطه را می توان در پیوست در جدول A3 تأیید کرد.
می توان مشاهده کرد که نتایج دقت نشان داد که افزونه (ستون ششم) نتایج OTB را بدون افزونه (ستون چهارم و پنجم) تا دو برابر در مؤلفه طول مسیر به طور قابل توجهی بهبود بخشید. با مقایسه نتایج بهدستآمده با پلاگین و با PCI (ستون دوم و سوم)، میبینیم که دقتها هم برای RPC و هم برای مدل دقیق بسیار مشابه بود. علاوه بر این، نتایج OTB با افزونه حتی بهتر از نتایج بهدستآمده با دو مدل PCI به نظر میرسید. در این مورد، آزمایشات بیشتری نیز باید برای تایید این رفتار انجام شود.
4. نتیجه گیری و پیشرفت های بیشتر
توابع توسعه یافته در OTB امکان تصحیح تصاویر ماهواره ای با وضوح بالا و بسیار بالا را با استفاده از چندین مدل فراهم می کند. در حال حاضر، OTB در QGIS دارای محدودیت هایی است که به طور قابل توجهی دقت قابل دستیابی نهایی را کاهش می دهد. علاوه بر این، رابطهای عملیات مختلف اغلب برای استفاده پیچیده هستند و در برخی موارد استفاده از توابع خط فرمان را آسانتر میکنند. به همین دلیل، پلاگین QGIS شرح داده شده در اینجا برای ساده کردن قابلیت استفاده OTB و بهبود دقت نتایج آن توسعه یافته است.
پلاگین شرح داده شده امکان تسهیل برخی از عملیات از جمله:
- –
-
قابلیت تطبیق مستقیم نقاط لازم از ژئوارفرانس QGIS بدون نرم افزار خارجی.
- –
-
امکان وارد کردن مختصات GCP در سیستم های مختلف که توسط افزونه بازپخش می شوند.
- –
-
رابط گرافیکی برای گزینه های لازم برای تصحیح صحیح صحیح؛
- –
-
ارتفاعات دقیق ورودی برای GCPها و CPها مانند آنهایی که با GPS دیفرانسیل اندازه گیری می شوند. و
- –
-
توانایی تشخیص GCPها و CPها در مرحله ورودی برای ارزیابی دقت واقعی همانطور که در آمار تعریف شده است.
برای تأیید اثربخشی افزونه ACYOTB از نقطه نظر دقت مدل و دقت نتیجه، مجموعه کاملی از آزمایشها بر روی یک مجموعه داده موجود انجام شد. نتایج بهبود قابل توجهی در دقت و دقت با انجام همان عملیات در OTB با و بدون پلاگین ارائه شده نشان داد. با استفاده از مدل RPC OTB با افزونه، نتایج عملاً مشابه نتایج نرم افزارهای تجاری معتبر (گاهی بهتر) بود، هم در مقایسه با مدل دقیق و هم با مدل RPC. نتایج بهتری که از OTB با استفاده از RPC با پلاگین در مقایسه با PCI در نوع خاصی از تصویر به دست میآید، میتواند به دلیل الگوریتمهای مختلف روتوترجمه مورد استفاده باشد. در واقع، OTB از تبدیل پنج پارامتری استفاده می کند، در حالی که PCI به جای آن از تبدیل Affine گسترده تر استفاده می کند. تفاوت در نتایج می تواند به دلایل دیگری نیز باشد، اما از آنجایی که PCI، بر خلاف OTB، یک نرم افزار تجاری بسته است، درک آنها دشوار است. از سوی دیگر، توابع OTB منبع باز را می توان بیشتر توسعه، گسترش و بهبود بخشید.
ما قصد داریم این افزونه و آزمایش را به سایر ماهواره های موجود در OTB با همکاری تیم توسعه آن گسترش دهیم.
مشارکت های نویسنده
نظارت، والریو بایوچی، فرانچسکا جیانونه، فلیسیا مونتی و فلیسیا واتوره. روش شناسی، والریو بایوچی، فرانچسکا جیانونه، فلیسیا مونتی و فلیسیا واتوره. تحقیق، والریو بایوچی، فرانچسکا جیانونه، فلیسیا مونتی و فلیسیا واتوره؛ نویسندگی — بررسی و ویرایش، والریو بایوچی، فلیسیا مونتی و فلیسیا واتوره. همه نویسندگان نسخه منتشر شده نسخه خطی را خوانده و با آن موافقت کرده اند.
منابع مالی
این مقاله تا حدی توسط بودجه FFABR 2017 وزارت دانشگاه ها و تحقیقات علمی ایتالیا (MIUR) تامین شده است.
قدردانی
نویسندگان از Città metropolitana di Napoli (اداره کلان شهر ناپل) برای اجازه استفاده از برخی از مواد برای آزمایش تشکر می کنند.
تضاد علاقه
نویسندگان هیچ تضاد منافعی را اعلام نمی کنند.
پیوست اول
مدلهای دقیق بر اساس معادلات همخطی (رویکرد فتوگرامتری) هستند و با در نظر گرفتن ویژگیهای هندسی و حسگر، اکتساب تصاویر را توصیف میکنند. بازسازی بخش مداری در طول گرفتن تصویر با مطالعه حالت اکتساب، ویژگی های حسگر، موقعیت ماهواره و نگرش به دست می آید ( شکل A1 ، معادله (A1)).
معادلات خط خطی، موقعیت یک نقطه در فضای تصویر را به نقطه متناظر در فضای جسم، بر اساس یک طرح ریزی مرکزی، مرتبط می کند.

شکل A1. مدل فتوگرامتری دقیق.
جایی که
-
f فاصله کانونی است.
-
R ماتریس چرخش از ECI به سیستم حسگر است.
-
x s و y s مختصات سیستم حسگر هستند.
-
X t , Y t , و Z t مختصات ECI نقطه زمین هستند و
-
Xs، Ys و Zs مختصات ECI ماهواره هستند.
سیستم زمین-مرکز زمین ثابت (ECEF) (E) مبدأ مرکز جرم زمین است، محور X محل تلاقی صفحه استوایی و صفحه نصف النهار مرجع (نصف النهار عبوری: نزدیک اما مساوی نیست). نصف النهار گرینویچ)، محور Z میانگین محور چرخشی است و محور Y سیستم مختصات راست دست را تکمیل می کند. سیستم اینرسی مرکز زمین (ECI) (I) مبدأ مرکز جرم زمین است، محور X به اعتدال بهاری (دوران J2000، 1 ژانویه 2000، سنگ معدن 12 UT)، محور Z به آسمان اشاره می کند. قطب شمال (دوران J2000) و محور Y سیستم مختصات راست دست را تکمیل می کند. ماتریس تبدیل از حسگر به سیستم ECI را می توان به عنوان تابعی از پارامترهای مداری کپلرین و زوایای نگرش بیان کرد.
این پارامترهای تقریبی باید با برآورد حداقل مربعات بر اساس تعداد مناسبی از نقاط کنترل زمینی (GCPs)، مجموعهای از نقاط با مختصات شی که از طریق یک بررسی مستقیم به عنوان یک بررسی دیفرانسیل GNSS محاسبه میشوند، تصحیح شوند.
معمولاً مختصات GCP در یک چارچوب مرجع ECEF بیان می شود (به عنوان مثال RDN2008-ETRF2000 برای ایتالیا). بنابراین، به منظور استفاده از آنها در معادلات هم خطی، یک تبدیل ECEF-ECI مورد نیاز است. ماتریس چرخش ECI-ECEF با در نظر گرفتن حرکات زمین در فضا محاسبه میشود: تقدم، حرکت قطبی، و چرخش زمین حول محورش.
حتی اگر مدلهای دقیق از نظر تئوری بالاترین دقت را ارائه دهند، آنها مدلهای پیچیدهای هستند که به پارامترهای مداری و اطلاعات نگرش حسگر نیاز دارند و زمانی که GCPهای کمی در دسترس هستند یا اصلاً وجود ندارند، نمیتوان از آنها استفاده کرد. در واقع، حداقل 10 GCP معمولا برای هر تصویر مورد نیاز است.
ضمیمه B

شکل A2. نمونه ای از تک نگاری نقطه ای بررسی شده GPS/GNSS.
پیوست ج

جدول A1. جدول کامل برای تخمین دقت مدل در GCPها.
جدول A2. جدول کامل از ارتفاع های مختلف استفاده شده; ستون های 1 و 3 تفاوت معنی داری را نشان نمی دهند.
جدول A3. جدول کامل برای تخمین دقت مدل در 11 GCP و دقت در 10 CP.
منابع
- گریزوننت، ام. میشل، جی. پوون، وی. اینگلادا، جی. ساوینو، ام. Cresson, R. Orfeo ToolBox: پردازش متن باز تصاویر سنجش از راه دور. Geospat را باز کنید. نرم افزار داده ایستادن. 2017 ، 2 . [ Google Scholar ] [ CrossRef ]
- تئودورو، AC; Araujo, R. مقایسه عملکرد تکنیکهای تحلیل تصویر مبتنی بر شی موجود در نرمافزار منبع باز (Spring و Orfeo Toolbox/Monteverdi) با در نظر گرفتن دادههای وضوح فضایی بسیار بالا. J. Appl. از راه دور. Sens. 2016 , 10 . [ Google Scholar ] [ CrossRef ]
- هیپکه، سی. یاکوبسن، ک. Mills, JP تصویربرداری از زمین با وضوح بالا برای اطلاعات مکانی، بخش دوم. فتوگرام ضبط 2008 ، 23 ، 351-352. [ Google Scholar ] [ CrossRef ]
- هیپکه، سی. یاکوبسن، ک. Mills, JP تصویربرداری زمین با وضوح بالا برای اطلاعات مکانی، قسمت اول. Photogramm. ضبط 2008 ، 23 ، 252-254. [ Google Scholar ] [ CrossRef ]
- بایوچی، وی. کرسپی، م. دی وندکتیس، ال. Giannone، F. یک مدل دقیق جدید برای تصحیح تصاویر با وضوح بالا همزمان و ناهمزمان. در مجموعه مقالات بیست و چهارمین سمپوزیوم EARsel در مورد استراتژی های جدید برای سنجش از دور اروپا، دوبرونیل، کرواسی، 25-27 مه 2004 . اولوئیچ، م.، ویرایش. Millpress: روتردام، هلند، 2005; ISBN 90 5966 003 X. [ Google Scholar ]
- Toutin، T. پیشرفته ترین تصحیح هندسی داده های سنجش از راه دور: دیدگاه ادغام داده ها. بین المللی J. Image Data Fusion 2011 ، 2 ، 3-35. [ Google Scholar ] [ CrossRef ]
- Jacobsen, K. خطاهای سیستماتیک تصویر هندسی ماهواره های نوری با وضوح بسیار بالا. بین المللی قوس. فتوگرام از راه دور. حس اسپات. Inf. علمی 2018 ، -XLII-1 ، 233–238. [ Google Scholar ] [ CrossRef ]
- توپان، ح. یاکوبسن، ک. کم، ا. اوزندی، م. اوروچ، م. باکی اوغلو، OB; بایک، سی. Taşkanat, T. ارزیابی جامع تصاویر بسته نرم افزاری Pléiades-1A برای کاربردهای جغرافیایی. عرب جی. ژئوشی. 2019 ، 12 ، 223. [ Google Scholar ] [ CrossRef ]
- ژانگ، آر. ژو، جی. ژانگ، جی. ژو، ایکس. Huang, J. Orthorectification مبتنی بر RPC برای تصاویر ماهواره ای با استفاده از FPGA. Sensors 2018 , 18 , 2511. [ Google Scholar ] [ CrossRef ] [ PubMed ]
- Toutin, T. مقاله مروری: پردازش هندسی تصاویر سنجش از دور: مدلها، الگوریتمها و روشها. بین المللی جی. ریموت. Sens. 2004 , 25 , 1893-1924. [ Google Scholar ] [ CrossRef ]
- مشخصات فنی – مشخصات فنی. در دسترس آنلاین: www.pcigeomatics.com/pdf/geomatica/techspecs/2018/Satellite-Ortho-Suite.pdf (در 28 مارس 2019 قابل دسترسی است).
- ماژول فتوگرامتری ENVI. در دسترس آنلاین: www.harrisgeospatial.com/Portals/0/pdfs/HG_ENVI_Photogrammetry_module_data-sheet_WEB.pdf (در 28 مارس 2019 قابل دسترسی است).
- موکول، م. سریواستاوا، وی. جید، اس. Mukul، M. عدم قطعیت در ماموریت توپوگرافی رادار شاتل (SRTM) ارتفاعات: بینش از هیمالیا و شبه جزیره هند. علمی Rep. 2017 , 7 , 41672. [ Google Scholar ] [ CrossRef ] [ PubMed ]
- فریزر، CS; یاماکاوا، تی. هانلی، HB; Dare, PM Geopositioning از تصاویر ماهواره ای با وضوح بالا: تجربیات با مدل جهت گیری حسگر affine. در مجموعه مقالات سمپوزیوم بین المللی زمین شناسی و سنجش از دور IEEE 2003، تولوز، فرانسه، 21 تا 25 ژوئیه 2003. [ Google Scholar ] [ CrossRef ]
- لی، ز. وانگ، ام. لی، دی. Lei، TL Stream-based Orthorectification در یک محیط خوشه GPU. IEEE Geosci. از راه دور. سنس لت. 2014 ، 11 ، 2115-2119. [ Google Scholar ] [ CrossRef ]
- نیما – آژانس ملی تصویربرداری و نقشه برداری مجموعه افزونه های کنترل شده (CE) برای فرمت انتقال تصویر ملی (NITF). در دسترس آنلاین: https://geotiff.maptools.org/STDI-0002_v2.1.pdf (در 28 مارس 2019 قابل دسترسی است).
- GDAL. در دسترس آنلاین: https://gdal.org/gdal.pdf (در 18 اکتبر 2019 قابل دسترسی است).
- روپنیک، ای. پیروت دیسیلینی، ام. دلورمه، ا. Klinger, Y. جهت گیری تصویر ماهواره ای اصلاح شده در ابزار منبع باز فتوگرامتری رایگان apero/micmac. ISPRS Ann. فتوگرام از راه دور. حس تفت. Inf. علمی 2016 ، III-1 ، 83-90. [ Google Scholar ] [ CrossRef ]
- فریزر، CS; هانلی، RPCهای جبرانشده با تعصب HB برای جهتگیری حسگر تصاویر ماهوارهای با وضوح بالا. فتوگرام مهندس از راه دور. Sens. 2005 , 7 , 909-915. [ Google Scholar ] [ CrossRef ]
- هانلی، HB; جهت گیری حسگر فریزر، CS برای تصاویر ماهواره ای با وضوح بالا: بینش های بیشتر در مورد RPC های جبران شده با bais. فتوگرام مهندس از راه دور. Sens. 2004 , 71 . [ Google Scholar ]
- ژو، جی. Li, R. ارزیابی دقت نقاط زمینی از تصاویر ماهواره ای با وضوح بالا IKONOS. فتوگرام مهندس از راه دور. Sens. 2000 , 66 , 1103-1112. [ Google Scholar ]
- فرمول های تبدیل مختصات وزن دار گرینفلد، JS حداقل مربعات و کاربردهای آنها. J. Surv. مهندس 1997 ، 123 ، 147-161. [ Google Scholar ] [ CrossRef ]
- کاربران OTB، مدلهای Orectification. جولای 2019. در دسترس آنلاین: https://otb-users.37221.n3.nabble.com/Orthorectification-models-td4031100.html (در 19 دسامبر 2019 قابل دسترسی است).
- وب سایت SRTM. در دسترس آنلاین: https://dds.cr.usgs.gov/srtm/version2_1/SRTM3/ (در 19 دسامبر 2019 قابل دسترسی است).
- بایوچی، وی. للو، ک. دقت نقشه برداری در مقیاس بالا تا متوسط 1908 رم و اطراف آن و مسائل مربوط به ارجاع جغرافیایی. Acta Geodaetica et Geophysica Hungarica 2010 ، 45 ، 97-104. [ Google Scholar ] [ CrossRef ]
- پولیگه، جی. بایوچی، وی. Lupia, F. ارزیابی دقت افقی تصاویر Google Earth با وضوح بسیار بالا در شهر رم، ایتالیا. بین المللی جی دیجیت. زمین 2016 ، 9 ، 342-362. [ Google Scholar ] [ CrossRef ]
- کتابخانه نرم افزار تبدیل مختصات PROJ. انتشار 6.0.0. 21 ژانویه 2019. در دسترس آنلاین: https://raw.githubusercontent.com/OSGeo/proj.4/gh-pages/proj.pdf (در 19 دسامبر 2019 قابل دسترسی است).
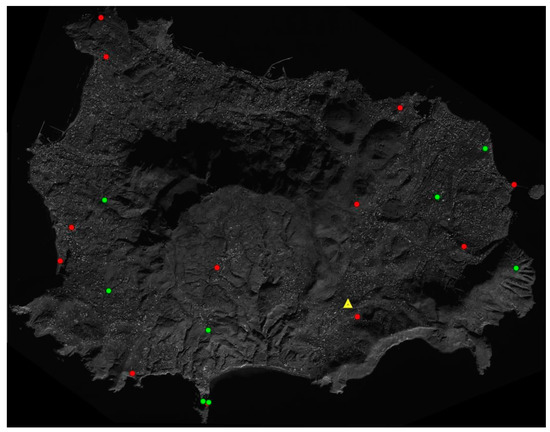
شکل 1. توزیع نقطه کنترل زمینی (GCP) مورد استفاده برای فرآیند orthorectification. عرض تصویر حدود 13 کیلومتر است. قرمز، GCPs؛ سبز، CPs; و زرد، ایستگاه دائمی “ISCH”. منطقه مورد مطالعه کل قلمرو جزیره Ischia ایتالیا است.
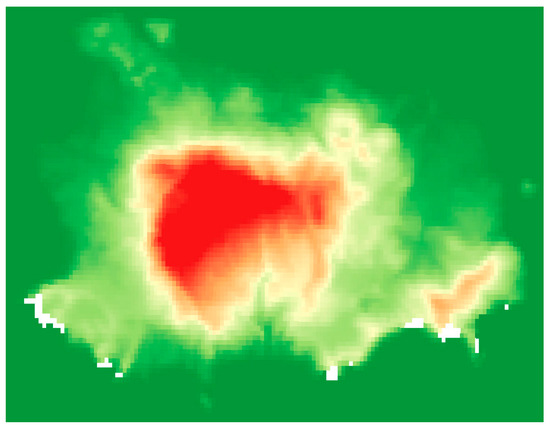
شکل 2. کاشی ماموریت توپوگرافی رادار شاتل (SRTM). عرض تصویر حدود 13 کیلومتر است. پیکسلهای سفید، پیکسلهای «بدون ارزش داده» هستند.

شکل 3. جزئیات سلول های ( الف ) “بدون مقدار داده” در SRTM و ( ب ) ناپیوستگی در تصویر اصلاح شده به دست آمده است.

شکل 4. منوی ماژول OrthoRectification.
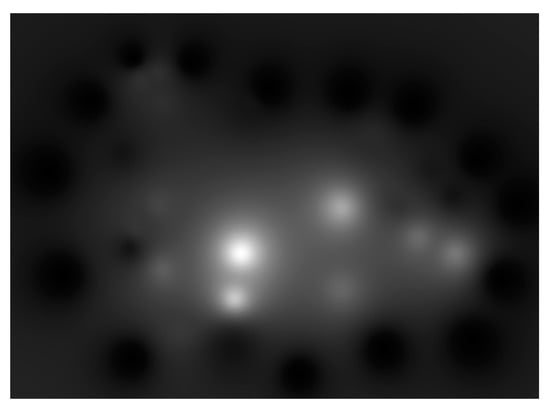
شکل 5. مدل ارتفاع دیجیتال ساختگی (DEM) به دست آمده از درونیابی وزنی معکوس مقادیر ارتفاع GCP.
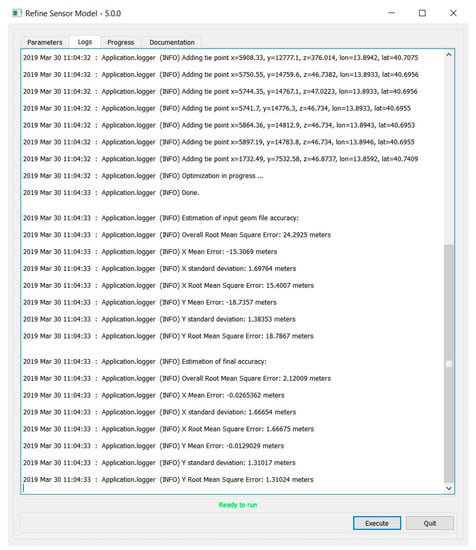
شکل 6. گزارش “دقت” از RefineSensorModel .
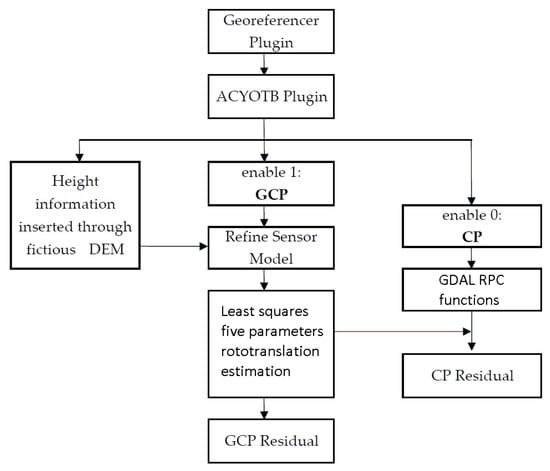
شکل 7. نمودار جریان تخمین دقت افزونه ACYOTB. نقاط زمینی با استفاده از گزینه “فعال کردن” پلاگین جغرافیایی QGIS به GCP و CP تقسیم شدند.
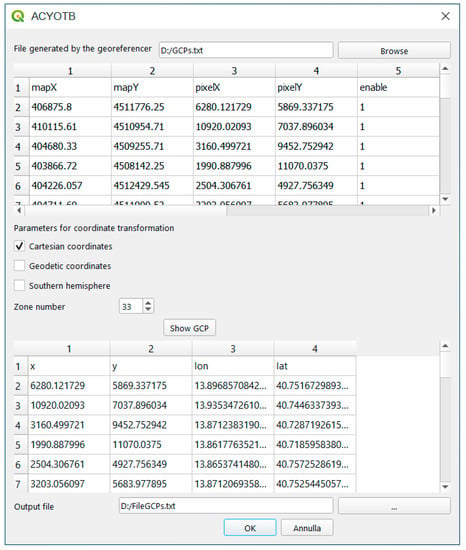
شکل 8. رابط گرافیکی پلاگین ACYOTB. فایل ورودی از georeferencer QGIS به دست آمد، در حالی که فایل خروجی یک فایل متنی با فرمت OTB است. در صورت لزوم، پلاگین به طور خودکار تبدیل مختصات را محاسبه می کند.
جدول 1. دقت تخمینی GCP با استفاده از مدل ها و ارتفاعات مختلف.
جدول 2. دقت تخمینی 11 GCP و دقت 10 CP با استفاده از مدل ها و ارتفاعات مختلف.


1 نظر