

چارچوبی از انتخاب الگوریتم فیوژن مکانی-زمانی برای ساخت سری زمانی Landsat NDVI
خلاصه

کلید واژه ها:
الگوریتم همجوشی فضایی و زمانی ; سری زمانی لندست ; طرح غربالگری
1. معرفی
2. روش شناسی
2.1. الگوریتم های همجوشی فضایی و زمانی پایه
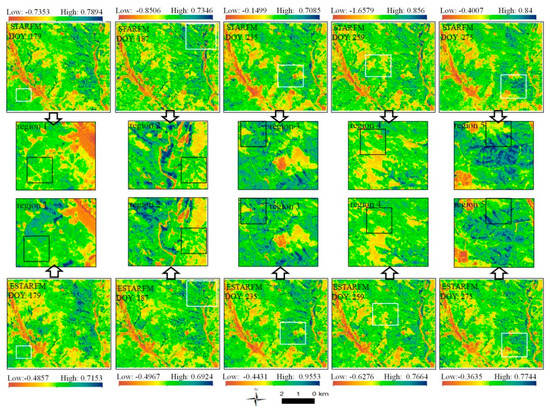
2.1.1. مدل همجوشی بازتابی تطبیقی مکانی و زمانی (STARFM)
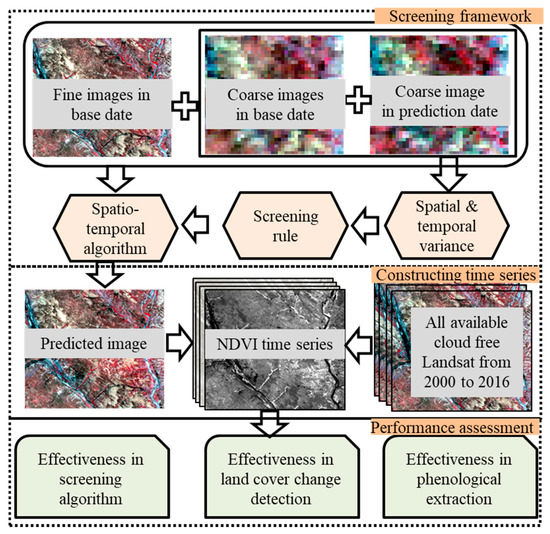
STARFM میتواند نتایج همجوشی رضایتبخشی را در مرحله تغییر غیرخطی پوشش زمین و همچنین در مناطق همگن ارائه دهد [ 17 ]، که فرض میکند خطاهای باقیمانده بین تصویر درشت و تصویر ظریف تغییرناپذیر بوده و ناشی از تغییرات پوشش زمین و کاربری زمین است. ویژگی های طول موج بین دو سنسور و شرایط روشنایی. بنابراین، تفاوت بین تصویر ریز و تصویر درشت در تاریخ پایه و پیشبینی باید معادل باشد. با توجه به اینکه پیکسل های مشابه همسایه بازتاب مشابهی دارند، STARFM با ترکیب تابع وزن، که در آن تابع وزن، فاصله مکانی، اختلاف طیفی و اختلاف زمانی یکپارچه شده است، اصلاح شد [17] .]. اجرای STARFM را میتوان به این صورت خلاصه کرد که ابتدا یک جفت تصویر ریز و درشت در تاریخ پایه و یک تصویر درشت در تاریخ پیشبینی تهیه میکنیم، سپس پیکسلهای همسایه مشابه را در یک پنجره متحرک پیدا میکنیم و در نهایت تصویر ریز را پیشبینی میکنیم. تاریخ پیش بینی STARFM را می توان به صورت زیر تعریف کرد:
که در آن x w /2 ، y w /2 مکان مرکزی پنجره متحرک است، جایی که پنجره متحرک ( w ) به عنوان عرض 31 پیکسل تنظیم شده است. تنظیمات پارامتر بیشتر می تواند به [ 12 ، 17 ] مراجعه کند. L و M به ترتیب بازتاب تصویر ظریف و تصویر درشت هستند. n تعداد تصاویر مرجع است، بنابراین k از 1 تا n است . t p و t k به ترتیب تاریخ ترکیب و تصاویر مرجع است. W ijkبه ضریب وزنی که با فاصله مکانی، شباهت طیفی و اختلاف زمانی تعیین می شود، اشاره دارد و به شرح زیر است:
که در آن S ، T و D شباهت طیفی، اختلاف زمانی و فاصله فضایی بین تصاویر ظریف و درشت را نشان میدهند.
2.1.2. STARFM پیشرفته (ESTARFM)
بر خلاف STARFM، ESTARFM بر اساس حداقل دو جفت تصویر مرجع درشت و ریز است که یک تغییر خطی پوشش زمین بین این دو تاریخ مرجع را فرض میکند [ 8 ]. بنابراین، ضریب تبدیل خطی (V) بین تصاویر مرجع باید برای نشان دادن شیب تغییر طیفی محاسبه شود [ 8 ]. مانند STARFM، تابع وزن برای ادغام تفاوت طیفی، اختلاف زمانی و فاصله مکانی هر پیکسل مشابه همسایه استفاده می شود. اگر چه ESTARFM بهبود یافته است، دقت همجوشی آن تحت تأثیر کیفیت و کمیت تصویر مرجع و فرضیه خطی آن است [ 29 ، 30 ]. ESTARFM را می توان به صورت زیر تعریف کرد:
که در آن L و M بازتاب تصویر ظریف و تصویر درشت هستند. t زمان است. t p و t k به ترتیب تاریخ ترکیب و تصاویر مرجع هستند. N تعداد پیکسل های مشابه در پنجره های متحرک است که در این مقاله اندازه پنجره متحرک به صورت عرض 31 پیکسل تعیین شده است . تنظیمات پارامتر بیشتر به [ 8 ] مراجعه کنید. W ضریب وزن است.
2.2. واریانس مکانی و زمانی
واریانس مکانی و زمانی واریانس را به فضا و زمان تقسیم می کند [ 31 ، 32 ]. این دو واریانس نشان دهنده تفاوت های مکانی و زمانی پوشش زمین ناشی از تغییرات فنولوژیکی یا فعالیت های انسانی است. میانگین واریانس فضایی بر درجه ناهمگونی فضایی سطح تأکید دارد، در حالی که واریانس زمانی متوسط نشان دهنده پویایی زمانی اشیا است. بنابراین، واریانس مکانی و زمانی روش جدیدی برای تعیین تفاوت در تصاویر الگوریتم فیوژن فراهم میکند. تقسیم بندی فرمول زمان-اول و فضا-اول را می توان به ترتیب به صورت زیر تعریف کرد:
که در آن δg2 واریانس مکانی و زمانی در فضا و زمان است، در حالی که m و n به ترتیب نشان دهنده m صحنه در زمان و n پیکسل در فضا هستند ( m = 2 برای STARFM و m = 3 برای ESTARFM). �س2¯و �تی2¯به ترتیب واریانس مکانی و واریانس زمانی است. δt 2 ( μ ) و δ s 2 ( μ ) به ترتیب نشان دهنده واریانس زمانی میانگین های مکانی و واریانس مکانی میانگین های زمانی هستند .
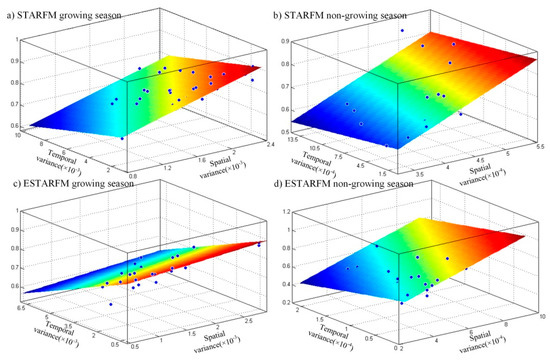
در اینجا، ما فرض کردیم که دقت همجوشی تغییر خطی با واریانس زمانی و مکانی است. بنابراین، یک رابطه خطی بین دقت همجوشی و واریانسهای زمانی و مکانی ایجاد شد. بنابراین، مقایسه کمی الگوریتمهای همجوشی مکانی-زمانی مختلف با تاریخ متمایز و تصاویر مرجع میتواند انجام شود. برای ساده کردن مدل و قوی کردن قاعده صفحه نمایش، به جای مقایسه مستقیم مقدار دقت الگوریتم همجوشی مکانی-زمانی برای انتخاب الگوریتم، از دقت درجه بندی شده استفاده کردیم. علاوه بر این، ضریب تعیین (R2 ) از 0 تا 1 به عنوان شاخص ارزیابی دقت همجوشی استفاده شد. بنابراین، دقت فیوژن به درجات مختلف از جمله دقت بالا (1 ≥ R2) تقسیم شد .> 0.8)، دقت عمومی بالا (0.8 ≥ R2 > 0.7)، دقت متوسط (0.7 ≥ R2 > 0.6)، و دقت پایین (0.6 ≥ R2 ) . در طی فرآیند غربالگری، الگوریتم فیوژن با درجه دقت همجوشی بالاتر به عنوان الگوریتم ترکیب تصویر مناسب برای تصویر تاریخ پیشبینی انتخاب شد. این قانون حتی در برخی موقعیتهای غیرمنتظره مانند پیشبینی R2 بیش از یک کار میکرد . علاوه بر این، اگر STARFM و ESTARFM درجه دقت همجوشی یکسانی داشته باشند، هر دو الگوریتم برای پیشبینی تصویر مناسب هستند. قانون غربالگری را می توان به صورت زیر تعریف کرد:
که در آن R 2 ضریب تعیین است و a ، b و c ضرایب رگرسیون هستند. �س2¯و �تی2¯میانگین واریانس مکانی و میانگین واریانس زمانی هستند، در حالی که زیرنویس i درجه i دقت همجوشی است و زیرنویسهای پایینتر و بالا به ترتیب محدودیتهای پایینتر و بالایی R2 را نشان میدهند .
2.3. ارزیابی عملکرد
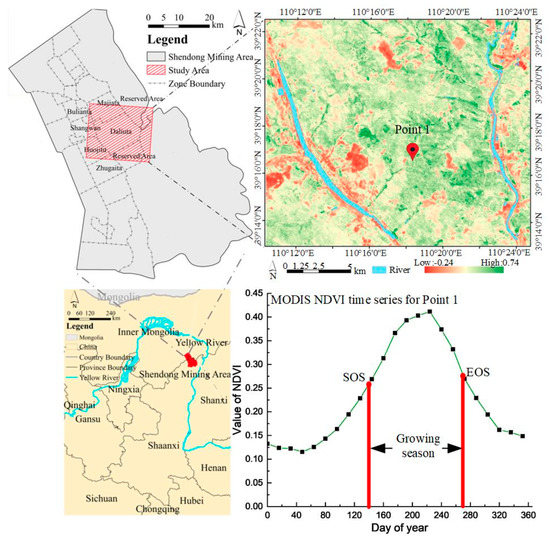
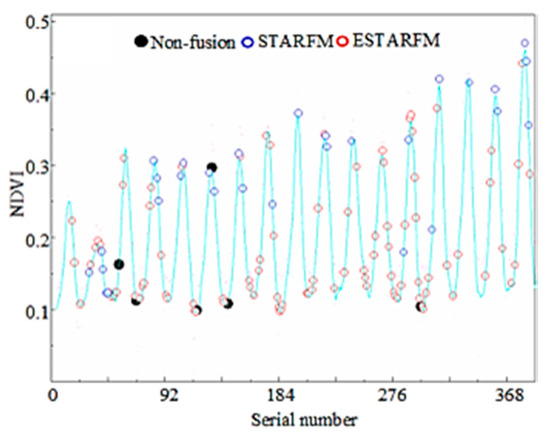
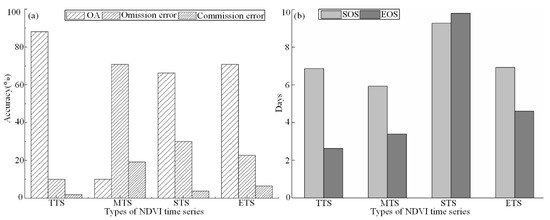
عملکرد چارچوب از سه جنبه شامل اثربخشی قانون غربالگری، اثربخشی سری زمانی Landsat NDVI در تشخیص تغییر پوشش زمین و اثربخشی استخراج فنولوژیکی مورد ارزیابی قرار گرفت. ابتدا، مقادیر R2 بین NDVI از تصویر مشاهده و تصویر همجوشی از STARFM یا ESTARFM به ترتیب برای ارزیابی اثربخشی قانون غربالگری محاسبه شد. هرچه سطح درجه بندی R2 بالاتر باشد، عدم قطعیت پیش بینی الگوریتم همجوشی مکانی-زمانی کمتر خواهد بود. دوم، مانیتور Breaks for Additive Seasonal and Trend (BFAST) که می تواند با بسته R انجام شود ( https://CRAN.R-project.org/package=bfast) برای تشخیص تغییر پوشش زمین، که شامل تغییر فصلی، تغییر تدریجی و تغییر ناگهانی است، استفاده شد [ 33 ]. از نظر فنی، تغییر ناگهانی، که به طور کلی تبدیل نوع پوشش زمین را در کوتاه مدت نشان می دهد، در این مقاله استفاده شد [ 34 ]. تنظیم پارامتر پیشفرض برای نمایشگر BFAST میتواند به [ 33 ، 35 مراجعه کند]. به عنوان یک شاخص دقت طبقهبندی معمولی، دقت کلی، خطای حذف و خطای تشخیص تغییر به عنوان شاخصهای دقت نامیده میشوند. در این مقاله، دقت کلی نسبت نمونههای پیشبینی صحیح به کل نمونهها بود که در آن کل نمونهها شامل نمونههای تغییر پوشش زمین و نمونههای بدون تغییر است. خطای حذف مربوط به نسبت نمونه های حذف شده از پوشش زمین، نمونه ها را به کل نمونه ها تغییر داده است. خطای کمیسیون به عنوان نسبت نمونه های بدون تغییر نادرست به کل نمونه ها تعریف شد. سوم، میانگین اختلاف مطلق (MAD)، که به عنوان شاخص ارزیابی نامیده می شود، برای نشان دادن اثربخشی استخراج گره فنولوژیکی استفاده شد، که در آن گره های فنولوژیکی شامل شروع فصل رشد (SOS) و پایان فصل رشد ( EOS)،36 ]. در روش آستانه پویا، یک چرخه فصل رشد به طور معمول در منطقه نیمه خشک چین پیشنهاد شد. SOS و EOS از نظر فنی به عنوان تاریخی تعریف می شوند که NDVI به دامنه فصلی لبه چپ و راست در منحنی سالانه NDVI فیلتر شده Savitzky-Golay (S-G) افزایش و کاهش می یابد [37 ] . دامنه فصلی با آستانه نسبی 0.5 تعیین شد، همانطور که توسط مطالعات قبلی پیشنهاد شد [ 36 ، 38]. مانیتور BFAST را می توان به سادگی توصیف کرد که ابتدا دوره پایداری تاریخی سری های زمانی NDVI را با مدل روند فصلی برازش می کند و سپس تغییر پوشش زمین را بر اساس مبالغ متحرک (MOSUMs) باقیمانده ها در دوره رانندگی، جایی که فصل است، تشخیص می دهد. مدل روند را می توان به صورت زیر توصیف کرد:
جایی که �تیمقدار پیش بینی NDVI در زمان t است. و �1و �2نشان دهنده رهگیری و شیب است. ��و ��دامنه و مراحل چرخه فصل j را نشان می دهد. �تیعبارت خطا در زمان t است. اگر MOSUM ها به طور قابل توجهی از صفر منحرف شوند، تبدیل پوشش زمین صورت می گیرد. MOSUM ها را می توان به صورت زیر توصیف کرد:
که در آن h پهنای باند MOSUM ها است. جزئیات بیشتر در مورد پارامترهای مانیتور BFAST را می توان در [ 33 ، 39 ] یافت.
3. آزمایش و تجزیه و تحلیل اثربخشی
3.1. منطقه آزمایشی و مجموعه داده ها
3.1.1. منطقه آزمایشی
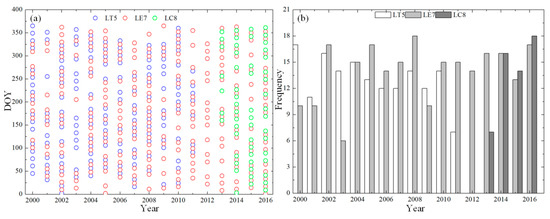
3.1.2. مجموعه داده ها و پیش پردازش
3.2. ساخت سری زمانی شاخص تفاوت نرمال شده گیاهی لندست (NDVI).
3.3. تحلیل اثربخشی
3.3.1. اثربخشی غربالگری الگوریتم
3.3.2. تشخیص تغییر پوشش زمین و تجزیه و تحلیل پایداری فنولوژیکی
4. بحث
4.1. مزایا و سازگاری
4.2. عدم قطعیت و چالش ها
4.3. دیدگاه ها
5. نتیجه گیری ها
اختصارات
| STARFM | مدل همجوشی بازتابی تطبیقی مکانی و زمانی |
| ESTARFM | STARFM پیشرفته |
| NDVI | شاخص گیاهی تفاوت عادی شده |
| MODIS | طیف رادیومتر تصویربرداری با وضوح متوسط |
| GIMMS | مطالعات مدلسازی و نقشه برداری موجودی جهانی |
| ETM+ | توسعه یافته موضوعی Mapper Plus |
| R 2 | ضریب تعیین |
| BFAST | Breaks برای افزایش فصلی و روند |
| دیوانه | میانگین تفاوت مطلق |
| SOS | شروع فصل رشد |
| EOS | پایان فصل رشد |
| S–G | فیلتر Savitzky–Golay |
| MOSUMs | مبالغ متحرک |
| TM | نقشهبردار موضوعی |
| OLI | تصویرساز زمین عملیاتی |
| LEDAPS | سیستم پردازش تطبیقی اختلال اکوسیستم لندست |
| USGS EROS | سازمان زمین شناسی ایالات متحده مرکز مشاهده و علم منابع زمین |
| L8SR | انعکاس سطح لندست 8 |
| BRDF-NBAR | نادیر بازتاب دو جهته توزیع تابع تنظیم شده |
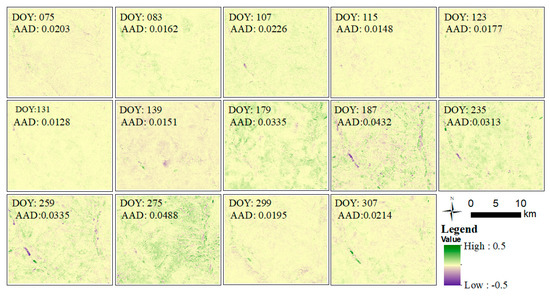
| DOY | روز سال |
| TTS | سری زمانی Landsat NDVI را هدف قرار دهید |
| MTS | سری زمانی MODIS NDVI |
| STS | سری زمانی Landsat NDVI مبتنی بر STRAFM |
| ETS | سری زمانی Landsat NDVI مبتنی بر ESTRAFM |
| LIM | مدل درونیابی خطی |
| STRUFM | مدل عدم اختلاط بازتاب مکانی و زمانی |
| ISTRUFM | STRUFM بهبود یافته |
| FSDAF | ادغام داده های مکانی-زمانی انعطاف پذیر |
| SSIM | شباهت ساختاری |
| RMSE | ریشه میانگین مربعات خطا |
| UIQI | شاخص جهانی کیفیت تصویر |
| UNOSAT | برنامه کاربردی ماهواره عملیاتی UNITAR |
| UN-REDD | برنامه همکاری سازمان ملل متحد برای کاهش انتشارات ناشی از جنگل زدایی و تخریب جنگل |
| GEE | موتور Google Earth |
| API | رابط برنامه نویسی کاربردی |
منابع
- گومز، سی. سفید، JC; Wulder، MA داده های سری زمانی سنجش از دور نوری برای طبقه بندی پوشش زمین: یک بررسی. ISPRS J. Photogramm. Remote Sens. 2016 , 116 , 55–72. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- چن، جی. زو، ایکس. Vogelmann، JE; گائو، اف. Jin, S. یک روش ساده و موثر برای پر کردن شکاف در تصاویر Landsat ETM+ SLC-off. سنسور از راه دور محیط. 2011 ، 115 ، 1053-1064. [ Google Scholar ] [ CrossRef ]
- مولر، ام. گرستمن، اچ. تورکو، دی. Gao, F. جفت کردن اطلاعات فنولوژیکی و سری های زمانی تولید شده مصنوعی برای انواع محصولات به عنوان شاخص برای اطلاعات پوشش گیاهی. در مجموعه مقالات تحلیل تصاویر سنجش از دور چند زمانی، انسی، فرانسه، 22 تا 24 ژوئیه 2015. صص 1-4. [ Google Scholar ]
- مولر، ام. گرستمن، اچ. گائو، اف. Dahms، TC; فورستر، ام. جفت کردن اطلاعات فنولوژیکی و سری های زمانی شاخص پوشش گیاهی شبیه سازی شده: محدودیت ها و پتانسیل ها برای ارزیابی و نظارت بر خطر فرسایش خاک. CATENA 2017 ، 150 ، 192-205. [ Google Scholar ] [ CrossRef ]
- تیان، اف. وانگ، ی. فنشولت، آر. وانگ، ک. ژانگ، ال. Huang, Y. نقشه برداری و ارزیابی روندهای NDVI از سری های زمانی مصنوعی به دست آمده با ترکیب داده های Landsat و MODIS در اطراف یک میدان زغال سنگ در فلات لس. Remote Sens. 2013 , 5 , 4255–4279. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- اشمیت، ام. لوکاس، آر. بانتینگ، پ. وربسلت، ج. Armston, J. تصاویر سری زمانی با وضوح چندگانه برای نظارت بر اختلال در جنگل و رشد مجدد در کوئینزلند، استرالیا. سنسور از راه دور محیط. 2015 ، 158 ، 156-168. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- چن، بی. هوانگ، بی. Xu، B. مقایسه مدل های همجوشی فضایی-زمانی: مروری. Remote Sens. 2015 ، 7 ، 1798-1835. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- زو، ایکس. چن، جی. گائو، اف. چن، ایکس. Masek، JG یک مدل همجوشی بازتابی تطبیقی فضایی و زمانی برای مناطق پیچیده ناهمگن. سنسور از راه دور محیط. 2010 ، 114 ، 2610-2623. [ Google Scholar ] [ CrossRef ]
- گائو، اف. هیلکر، تی. زو، ایکس. اندرسون، ام. ماسک، جی. وانگ، پی. Yang, Y. Fusing Landsat و MODIS Data for Vegetation Monitoring. IEEE Geosci. سنسور از راه دور Mag. 2015 ، 3 ، 47-60. [ Google Scholar ] [ CrossRef ]
- هوانگ، بی. ژانگ، H. همجوشی بازتاب فضایی-زمانی از طریق عدم اختلاط: حسابداری برای تغییرات فنولوژیکی و پوشش زمین. بین المللی J. Remote Sens. 2014 ، 35 ، 6213-6233. [ Google Scholar ] [ CrossRef ]
- جیا، دی. گائو، پی. چنگ، سی. بله، S. روش آموزش مشترک مبتنی بر ویژگی های چندگانه برای نقشه برداری محصول بر اساس تصاویر سری زمانی سنجش از دور. بین المللی J. Remote Sens. 2020 , 41 , 8096–8120. [ Google Scholar ] [ CrossRef ]
- زو، ایکس. هلمر، EH; گائو، اف. لیو، دی. چن، جی. Lefsky, MA یک روش مکانی-زمانی انعطافپذیر برای ادغام تصاویر ماهوارهای با وضوحهای مختلف. سنسور از راه دور محیط. 2016 ، 172 ، 165-177. [ Google Scholar ] [ CrossRef ]
- رائو، ی. زو، ایکس. چن، جی. Wang, J. یک روش بهبودیافته برای تولید مجموعه دادههای سری زمانی NDVI با وضوح فضایی بالا با دادههای چند زمانی MODIS NDVI و تصاویر Landsat TM/ETM+. Remote Sens. 2015 ، 7 ، 7865–7891. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- زو، ز. Woodcock، CE; هولدن، سی. یانگ، زی. تولید تصاویر مصنوعی Landsat بر اساس تمام داده های Landsat موجود: پیش بینی بازتاب سطح Landsat در هر زمان معین. سنسور از راه دور محیط. 2015 ، 162 ، 67-83. [ Google Scholar ] [ CrossRef ]
- سامانتا، ا. کاستا، MH; Nunes، EL; ویرا، SA; خو، ال. Myneni، RB در مورد “کاهش ناشی از خشکسالی در تولید اولیه خالص زمینی جهانی از سال 2000 تا 2009” نظر داد. Science 2011 ، 329 ، 940-943. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- لو، ی. گوان، ک. Peng, J. STAIR: یک روش عمومی و کاملاً خودکار برای ترکیب چندین منبع داده های ماهواره ای نوری برای تولید یک محصول بازتاب سطحی با وضوح بالا، روزانه و بدون ابر/شکاف. سنسور از راه دور محیط. 2018 ، 214 ، 87-99. [ Google Scholar ] [ CrossRef ]
- گائو، اف. ماسک، جی. شوالر، ام. هال، F. در مورد ترکیب بازتاب سطح لندست و MODIS: پیشبینی بازتاب روزانه سطح لندست. IEEE Trans. Geosci. Remote Sens. 2006 , 44 , 2207–2218. [ Google Scholar ]
- هیلکر، تی. Wulder، MA; Coops، NC; لینکه، جی. مکدرمید، جی. ماسک، جی جی. گائو، اف. White, JC یک مدل ترکیبی داده جدید برای نقشه برداری با وضوح مکانی و زمانی بالا آشفتگی جنگل بر اساس Landsat و MODIS. سنسور از راه دور محیط. 2009 ، 113 ، 1613-1627. [ Google Scholar ] [ CrossRef ]
- وو، بی. هوانگ، بی. کائو، ک. Zhuo, G. بهبود همجوشی بازتابی فضایی-زمانی با استفاده از تکنیکهای نقاشی درون تصویر و رگرسیون هسته هدایت. بین المللی J. Remote Sens. 2017 ، 38 ، 706-727. [ Google Scholar ] [ CrossRef ]
- ژانگ، دبلیو. لی، ا. جین، اچ. بیان، جی. ژانگ، ز. لی، جی. Qin، Z. Huang, C. یک مدل ترکیبی دادههای مکانی و زمانی پیشرفته برای ترکیب لندست و بازتاب سطحی MODIS برای تولید دادههای لندست مانند زمانی بالا. Remote Sens. 2013 , 5 , 5346–5368. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- وو، ام. نیو، ز. وانگ، سی. وو، سی. Wang, L. استفاده از داده های سری زمانی MODIS و Landsat برای تولید داده های مصنوعی لندست با وضوح بالا با استفاده از یک مدل همجوشی بازتابی مکانی و زمانی. J. Appl. از راه دور. Sens. 2012 , 6 , 063507. [ Google Scholar ]
- آهنگ، اچ. Huang، B. ادغام تصاویر ماهواره ای فضایی-زمانی از طریق یادگیری تصویر یک جفت. IEEE Geosci. از راه دور. سنس لت. 2012 ، 51 ، 1883-1896. [ Google Scholar ] [ CrossRef ]
- آهنگ، اچ. لیو، کیو. وانگ، جی. هنگ، آر. Huang، B. ادغام تصاویر ماهواره ای فضایی-زمانی با استفاده از شبکه های عصبی کانولوشنال عمیق. IEEE J. Sel. بالا. Appl. زمین Obs. Remote Sens. 2018 , 11 , 821–829. [ Google Scholar ] [ CrossRef ]
- جیا، دی. آهنگ، سی. چنگ، سی. شن، اس. نینگ، ال. Hui, C. یک روش جدید همجوشی فضایی-زمانی مبتنی بر یادگیری عمیق برای ترکیب تصاویر ماهوارهای با وضوحهای مختلف با استفاده از یک شبکه عصبی کانولوشنال دو جریانی. Remote Sens. 2020 , 12 , 698. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- ژو، جی. لئونگ، ی. Fung, T. رویکرد ادغام داده بیزی برای ادغام مکانی-زمانی تصاویر سنجش از راه دور. Remote Sens. 2017 ، 9 ، 1310. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- Moreno-Martínez، Á. Izquierdo-Verdiguier، E. مانه، نماینده مجلس؛ کمپز-والز، جی. رابینسون، ن. مونوز ماری، جی. سدانو، اف. کلینتون، ن. در حال اجرا، ترکیب سنسور با وضوح بالا چندطیفی SW برای صاف کردن و پر کردن شکاف در ابر. سنسور از راه دور محیط. 2020 , 247 , 111901. [ Google Scholar ] [ CrossRef ]
- واکر، جی. De Beurs، K. وین، آر. گائو، F. ارزیابی محصولات همجوشی داده های Landsat و MODIS برای تجزیه و تحلیل فنولوژی جنگل های خشک. سنسور از راه دور محیط. 2012 ، 117 ، 381-393. [ Google Scholar ] [ CrossRef ]
- Hobyb، AIE; رادگی، ا. تمتایی، ع. ار-راجی، ع. هادانی، DE; مرداس، م. Smiej، FM ارزیابی روشهای همجوشی فضایی-زمانی برای پیشبینی روزانه NDVI با وضوح بالا. در مجموعه مقالات پنجمین کنفرانس بین المللی محاسبات و سیستم های چند رسانه ای (ICMCS)، مراکش، مراکش، 29 سپتامبر تا 1 اکتبر 2016؛ صص 121-126. [ Google Scholar ]
- Knauer، K. گسنر، یو. فنشولت، آر. Kuenzer, C. چارچوب ترکیبی ESTARFM برای تولید سریهای زمانی در مقیاس بزرگ در مناظر مستعد ابر و ناهمگن. Remote Sens. 2016 , 8 , 425. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- لی، کیو. دینگ، اف. وو، دبلیو. Chen, J. بهبود ESTARFM و کاربرد آن برای ادغام تصاویر لندست-8 و دمای سطح زمین MODIS. در مجموعه مقالات چهارمین کارگاه بین المللی در مورد کاربردهای رصد زمین و سنجش از دور، گوانگژو، چین، 4 تا 6 ژوئیه 2016. صص 33-37. [ Google Scholar ]
- سان، اف. رودریک، ام ال. Farquhar, GD; لیم، WH; ژانگ، ی. بنت، ن. Roxburgh, SH تقسیم بندی واریانس بین فضا و زمان. ژئوفیز. Res. Lett. 2010 ، 37 ، 107. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- لی، بی. چن، ی. شی، ایکس. چن، ز. لی، دبلیو. تغییرات دما و بارندگی در محیط های مختلف در منطقه خشک شمال غربی چین. نظریه. Appl. کلیماتول. 2013 ، 112 ، 589-596. [ Google Scholar ] [ CrossRef ]
- وربسلت، ج. زیلیس، ع. هرولد، ام. تشخیص اغتشاش در زمان واقعی با استفاده از سری های زمانی تصویر ماهواره ای. سنسور از راه دور محیط. 2012 ، 123 ، 98-108. [ Google Scholar ] [ CrossRef ]
- وانگ، سی. لی، اس. المور، ای جی؛ جیا، دی. Mu, S. ادغام تکامل زمانی با اتوماتای سلولی برای شبیه سازی تغییر پوشش زمین. Remote Sens. 2019 , 11 , 301. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- وربسلت، ج. هیندمن، آر. نیونهام، جی. Culvenor، D. تشخیص روند و تغییرات فصلی در سری های زمانی تصاویر ماهواره ای. سنسور از راه دور محیط. 2010 ، 114 ، 106-115. [ Google Scholar ] [ CrossRef ]
- او، ز. دو، ج. ژائو، دبلیو. یانگ، جی. چن، ال. زو، ایکس. چانگ، ایکس. لیو، اچ. ارزیابی حساسیت دمایی فنولوژی بوته های زیر آلپ در مناطق کوهستانی نیمه خشک چین. کشاورزی برای. هواشناسی 2015 ، 213 ، 42-52. [ Google Scholar ] [ CrossRef ]
- چن، جی. جانسون، پی. تامورا، م. گو، ز. ماتسوشیتا، بی. یک روش ساده برای بازسازی مجموعه داده های سری زمانی NDVI با کیفیت بالا بر اساس فیلتر Savitzky-Golay. سنسور از راه دور محیط. 2004 ، 91 ، 332-344. [ Google Scholar ] [ CrossRef ]
- ژو، جی. کای، دبلیو. Qin، Y. لای، ال. گوان، تی. ژانگ، ایکس. جیانگ، ال. دو، اچ. یانگ، دی. پویایی فنولوژی پوشش گیاهی Cong، Z. آلپاین در طی 16 سال و تغییر آن با آب و هوا در منطقه نیمه خشک چین. علمی کل محیط. 2016 ، 572 ، 119-128. [ Google Scholar ] [ CrossRef ]
- قادرپور، ا. Vujadinovic، T. پتانسیل تحلیلهای طیفی حداقل مربعات و متقاطع موجک برای تشخیص اغتشاش در زمان واقعی در سری زمانی تصاویر ماهوارهای با فاصله نابرابر. Remote Sens. 2020 , 12 , 2446. [ Google Scholar ] [ CrossRef ]
- چن، جی. وانگ، ی. تغییرات کاربری زمین در منطقه استخراج زغال سنگ شندونگ. در مجموعه مقالات کنفرانس بین المللی فناوری چند رسانه ای، نینگبو، چین، 29 تا 31 اکتبر 2010. صص 1-4. [ Google Scholar ]
- لی، اس. رن، ال. Bian، Z. خصوصیات زمانی-مکانی پوشش گیاهی در یک منطقه معدنی نیمه خشک با استفاده از تجزیه تابع متعامد تجربی سری های زمانی MODIS NDVI. محیط زیست علوم زمین 2016 ، 75 ، 516. [ Google Scholar ] [ CrossRef ]
- لیو، ی. لی، اس. چنگ، ال. چنگ، دبلیو. شیونگ، جی. Bian، Z. فتوسنتز برگ سه گونه گیاهی معمولی تحت تأثیر ترکهای فرونشست معدن زغال سنگ: مطالعه موردی در منطقه نیمه خشک غرب چین. Photosynthetica 2019 ، 57 ، 75-85. [ Google Scholar ] [ CrossRef ]
- مک.؛ چنگ، ایکس. یانگ، ی. ژانگ، ایکس. گوا، ز. Zou، Y. بررسی فرونشست معدن بر اساس InSAR چند زمانی و تجزیه و تحلیل سریهای زمانی زیر مجموعه کوچک پایه – مطالعه موردی چهرههای کاری 22201-1/2 در معدن Bu’ertai، میدان زغالسنگ شندونگ، چین. Remote Sens. 2016 , 8 , 951. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- هوانگ، بی. آهنگ، H. همجوشی بازتاب فضایی و زمانی از طریق نمایش پراکنده. IEEE Trans. Geosci. Remote Sens. 2012 , 50 , 3707–3716. [ Google Scholar ] [ CrossRef ]
- ماسک، جی جی. Vermote، EF; سالئوس، NE; وولف، آر. هال، FG; Huemmrich، KF; گائو، اف. کاتلر، جی. Lim، TK A مجموعه داده بازتاب سطح لندست برای آمریکای شمالی، 1990-2000. IEEE Geosci. سنسور از راه دور Lett. 2006 ، 3 ، 68-72. [ Google Scholar ] [ CrossRef ]
- ورموت، ای. عدالت، سی. کلاوری، ام. فرانک، بی. تجزیه و تحلیل اولیه عملکرد محصول بازتاب سطح زمین Landsat 8/OLI. سنسور از راه دور محیط. 2016 ، 185 ، 46-56. [ Google Scholar ] [ CrossRef ]
- زو، ز. Woodcock، CE مبتنی بر اشیاء ابر و تشخیص سایه ابر در تصاویر Landsat. سنسور از راه دور محیط. 2012 ، 118 ، 83-94. [ Google Scholar ] [ CrossRef ]
- لی، پی. جیانگ، ال. Feng, Z. مقایسه متقابل شاخصهای پوشش گیاهی برگرفته از حسگرهای Landsat-7 Enhanced Thematic Mapper Plus (ETM+) و Landsat-8 Operational Land Imager (OLI). Remote Sens. 2013 , 6 , 310-329. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- Canty، MJ; نیلسن، AA نرمالسازی رادیومتری خودکار تصاویر ماهوارهای چندزمانی با تبدیل MAD با وزن مجدد مکرر. سنسور از راه دور محیط. 2008 ، 112 ، 1025-1036. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- املیانوا، IV; Mcvicar، TR; نیل، TGV; Li، LT; Dijk، AIJMV ارزیابی دقت ترکیب بازتابهای سطح Landsat-MODIS در دو منظره با دینامیک مکانی و زمانی متضاد: چارچوبی برای انتخاب الگوریتم. سنسور از راه دور محیط. 2013 ، 133 ، 193-209. [ Google Scholar ] [ CrossRef ]
- وانگ، ز. Schaaf، CB; سان، س. کیم، جی اچ. ارب، AM؛ گائو، اف. رومان، MO; یانگ، ی. پتروی، اس. Taylor، JR نظارت بر دینامیک سطح زمین و پوشش گیاهی با استفاده از سری های زمانی مصنوعی با وضوح مکانی و زمانی بالا از Landsat و محصول MODIS BRDF/NBAR/albedo. بین المللی J. Appl. زمین. Obs. Geoinf. 2017 ، 59 ، 104-117. [ Google Scholar ] [ CrossRef ]
- چن، بی. هوانگ، بی. Xu, B. ساخت یک چارچوب یکپارچه برای ادغام داده های سنجش از راه دور چند منبعی. در مجموعه مقالات سمپوزیوم بین المللی علوم زمین و سنجش از دور IEEE 2016 (IGARSS)، پکن، چین، 10 تا 15 ژوئیه 2016؛ صص 2574-2577. [ Google Scholar ]
- بنداری، س. فین، اس. گیل، تی. آماده کردن سری زمانی تصویر Landsat (LITS) برای نظارت بر تغییرات در فنولوژی گیاهی در کوئینزلند، استرالیا. Remote Sens. 2012 ، 4 ، 1856-1886. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- همینا، جی. دوفرنه، ای. پونتیلر، جی.-ای. دلپیر، ن. اوبینت، ام. کاکه، بی. د گراندکورت، آ. بوربن، بی. فلچارد، سی. Granier، A. ارزیابی پتانسیل داده های ماهواره ای MODIS برای پیش بینی فنولوژی گیاهی در بیوم های مختلف: بررسی با استفاده از اندازه گیری های NDVI زمینی. سنسور از راه دور محیط. 2013 ، 132 ، 145-158. [ Google Scholar ] [ CrossRef ]
- اکلوند، ال. Jönsson، P. TIMESAT: بسته نرم افزاری برای پردازش سری زمانی و ارزیابی پویایی پوشش گیاهی. در سری زمانی سنجش از دور ; Springer: Cham, Switzerland, 2015; صص 141-158. [ Google Scholar ]
- جانسون، پی. Eklundh, L. استخراج فصلی با برازش تابع به سری های زمانی داده های سنسور ماهواره ای. IEEE Trans. Geosci. Remote Sens. 2002 , 40 , 1824-1832. [ Google Scholar ] [ CrossRef ]
- آموروس-لوپز، جی. گومز-چوا، ال. آلونسو، ال. گوانتر، ال. زوریتا میلا، ر. مورنو، جی. Camps-Valls، G. ادغام چند زمانی Landsat/TM و ENVISAT/MERIS برای نظارت بر محصول. بین المللی J. Appl. زمین Obs. Geoinf. 2013 ، 23 ، 132-141. [ Google Scholar ] [ CrossRef ]
- لیائو، ال. آهنگ، جی. وانگ، جی. شیائو، ز. روش Wang, J. Bayesian برای ساخت مجموعه داده های NDVI مکرر مشابه Landsat با ادغام MODIS و Landsat NDVI. Remote Sens. 2016 ، 8 ، 452. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- Gevaert، CM; García-Haro، FJ مقایسه STARFM و الگوریتم مبتنی بر عدم اختلاط برای ترکیب داده های Landsat و MODIS. سنسور از راه دور محیط. 2015 ، 156 ، 34-44. [ Google Scholar ] [ CrossRef ]
- ما، جی. ژانگ، دبلیو. مارینونی، ا. گائو، ال. Zhang، B. یک مدل بهبود یافته بازتاب فضایی و زمانی برای سنتز سری های زمانی تصاویر مشابه landsat. Remote Sens. 2018 , 10 , 1388. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- Qu، Y. ژانگ، ی. وانگ، جی. یک الگوریتم ترکیبی دادههای شبکه بیزی پویا برای تخمین شاخص سطح برگ با استفاده از دادههای سری زمانی از اندازهگیری درجا تا مشاهدات سنجش از دور. بین المللی J. Remote Sens. 2012 ، 33 ، 1106-1125. [ Google Scholar ] [ CrossRef ]
- چن، ی. کائو، آر. چن، جی. زو، ایکس. ژو، جی. وانگ، جی. شن، ام. چن، ایکس. Yang, W. یک روش جدید متقابل فیوژن برای تعیین خودکار جفتهای تصویر ورودی بهینه برای NDVI Fusion دادههای مکانی و زمانی. IEEE Geosci. از راه دور. سنس لت. 2020 . [ Google Scholar ] [ CrossRef ]
- جاریانی، ع.ع. مک ویکار، TR; ون نیل، تی جی; املیانوا، IV; کالو، JN; Johansen، K. ترکیب دادههای Landsat و MODIS برای تولید شاخصهای چندطیفی: مقایسه رویکردهای «شاخص-سپس-ترکیب» و «مخلوط-سپس-شاخص». Remote Sens. 2014 , 6 , 9213–9238. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- ژائو، ام. در حال اجرا، کاهش ناشی از خشکسالی SW در تولید اولیه خالص زمینی جهانی از سال 2000 تا 2009. Science 2010 ، 329 ، 940-943. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- وانگ، ز. بوویک، AC; شیخ، HR; Simoncelli، EP ارزیابی کیفیت تصویر: از دید خطا تا شباهت ساختاری. IEEE Trans. فرآیند تصویر 2004 ، 13 ، 600-612. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- وانگ، ز. Bovik, AC یک شاخص جهانی کیفیت تصویر. فرآیند سیگنال IEEE Lett. 2002 ، 9 ، 81-84. [ Google Scholar ] [ CrossRef ]
- لیو، ایکس. دنگ، سی. چانوسوت، جی. هونگ، دی. Zhao، B. Stfnet: یک شبکه عصبی کانولوشنال دو جریانی برای ادغام تصویر فضایی و زمانی. IEEE Geosci. از راه دور. سنس لت. 2019 ، 57 ، 6552–6564. [ Google Scholar ] [ CrossRef ]
- گولیک، ن. هنچر، م. دیکسون، ام. ایلیوشچنکو، اس. تاو، دی. Moore, R. Google Earth Engine: تجزیه و تحلیل جغرافیایی در مقیاس سیاره ای برای همه. سنسور از راه دور محیط. 2017 ، 202 ، 18-27. [ Google Scholar ] [ CrossRef ]



بدون دیدگاه