


چگونه هندسه اکتساب تصویر کمپین های پهپاد بر محصولات مشتق شده و دقت آنها در مناطقی با ژئومورفولوژی پیچیده تأثیر می گذارد
چکیده
1. مقدمه
2. مواد و روشها
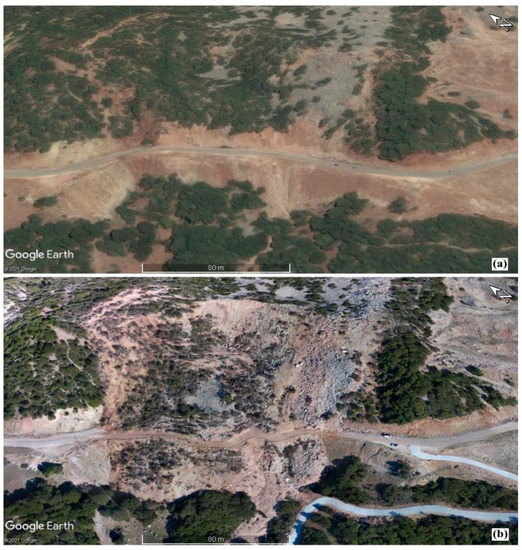
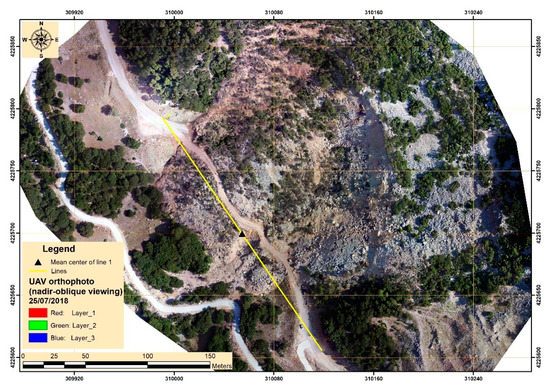
2.1. مطالعه موردی
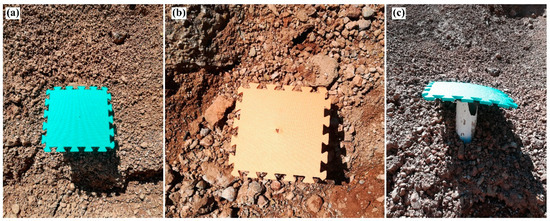
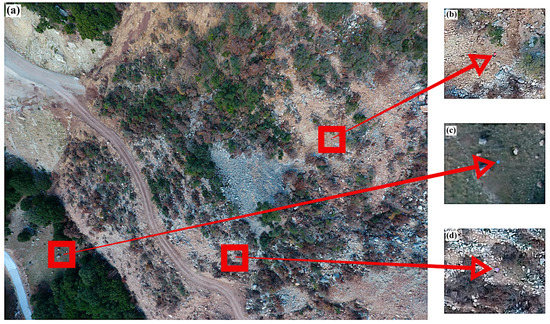
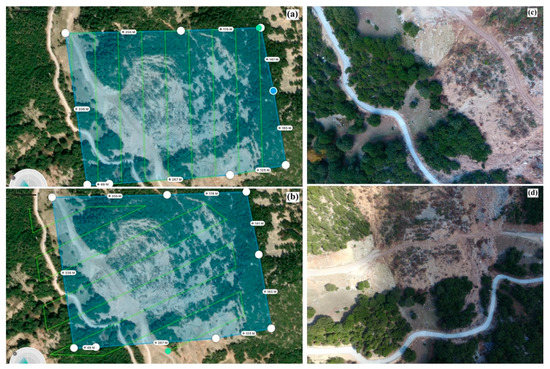
2.2. تجهیزات و جمع آوری داده ها
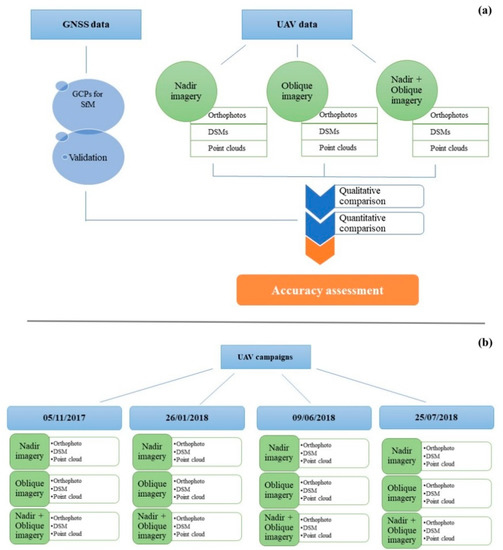
2.3. روش پردازش
-
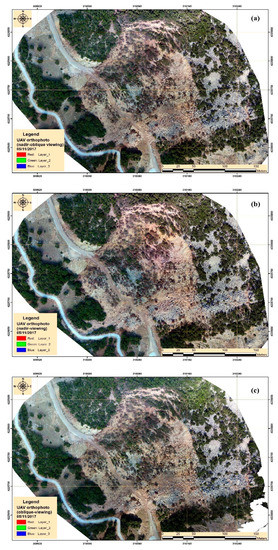
چهار عکس ارتو، چهار DSM و چهار ابر نقطه از تصاویر مشاهده نادر ( شکل 4 ب).
-
چهار عکس ارتو، چهار DSM و چهار ابر نقطه از تصاویر مشاهده مایل ( شکل 4 ب).
-
چهار عکس ارتو، چهار DSM و چهار ابر نقطه از ترکیب تصاویر نادر و مایل ( شکل 4 ب).
3. نتایج
3.1. ارزیابی دقت ارتفتو
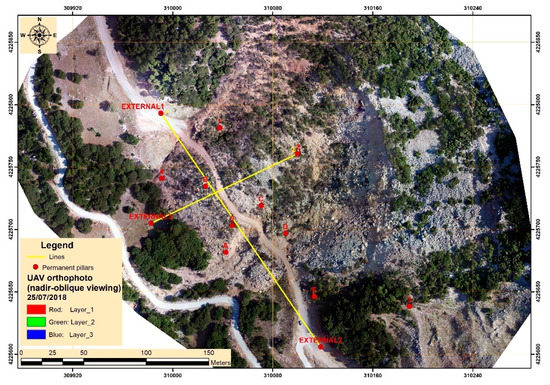
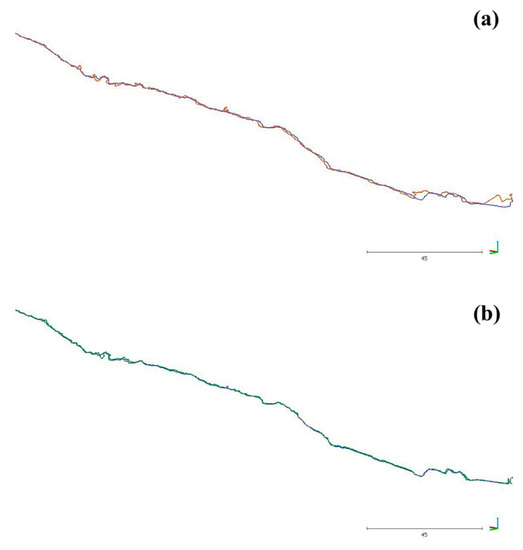
علاوه بر این، میانگین مرکز خطوط مرجع و خطوط دیجیتالی شده به منظور ارزیابی بیشتر دقت هر هندسه اکتساب برآورد شد. مرکز میانگین نشان دهنده مرکز جغرافیایی مجموعه ای از ویژگی ها مانند یک خط است که از میانگین مختصات x و y حاصل می شود [ 35 ، 36 ]. به طور گسترده ای برای ردیابی تغییرات در توزیع یا مقایسه توزیع ویژگی ها استفاده می شود. میانگین مرکز از رابطه زیر (معادله (1)) محاسبه می شود:
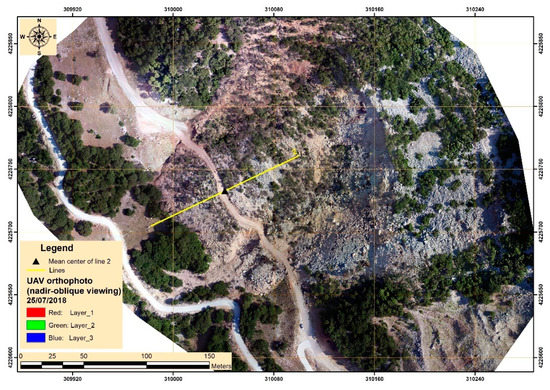
که در آن x i و y i مختصات یک ویژگی i و n تعداد کل ویژگی ها است. مرکز میانگین خط 1 در شکل 8 جابجا شده است و مرکز میانگین خط 2 در شکل 9 نشان داده شده است . فاصله بین مرکز میانگین مرجع و مرکز میانگین یک خط دیجیتالی از طریق ابزار نزدیک [ 37 ] تعیین شد. تغییرات میانگین مرکز هر عکس ارتوفتو در مقایسه با مرکز میانگین مرجع در جدول 6 نشان داده شده است.. ترکیب هندسه اکتسابی نادر و مایل کمترین فاصله را از مراکز میانگین مرجع هر دو خط دارند. با این حال، تصاویر مایل عملکرد بهتری را در اندازهگیری فواصل نزدیک از مرکز میانگین مرجع برای خط ژئودتیک 2 با دستیابی به مقادیر نزدیک به صفر در 50٪ از پروازهای پهپاد نشان داد. به طور کلی، تصاویر نادر مشاهده بیشترین فواصل را نشان می دهد که ممکن است مربوط به زمین پیچیده باشد.
3.2. ارزیابی دقت مدلهای سطح دیجیتال (DSM).
DSMهای مشتق شده برای دقت از طریق محاسبه ریشه میانگین مربعات خطا (RMSE) مورد ارزیابی قرار گرفتند. به طور کلی، روش ارزیابی دقت و کیفیت باید زمانی اعمال شود که دادههای مرجع یک مرتبه بهتر از دادههای مورد ارزیابی باشند. اندازه گیری های GNSS به عنوان یک نقطه مرجع استفاده شد ( شکل 7 )، که دقت چند میلی متری را نشان می دهد. RMSE تفاوت بین مقادیر DSM و مقادیر مرجع ارائه شده توسط یک سیستم GNSS [ 38 ] را اندازه گیری می کند و با معادله زیر (معادله (2)) ارائه می شود:
که در آن h ref ارتفاع مرجع، h i ارتفاع DSM در نقطه i و n تعداد GCPها است. تغییرات ارتفاع ناشی از محاسبه RMSE بین داده های مرجع و DSMهای فتوگرامتری پهپاد در جدول 7 نشان داده شده است.. بدیهی است که ترکیب تصاویر نادر و مایل در طی عملیات پهپاد به کمترین اختلاف ارتفاعی رسیده است. علاوه بر این، تصاویر مایل تطبیق خوبی با تولید DSM دارند که با مقادیر کوچک RMSE مشخص شده است. علیرغم مقادیر نسبتاً کوچک RMSE ناشی از هندسه مشاهده نادر، به نظر می رسد که اکتساب خاص از سایرین عقب است.
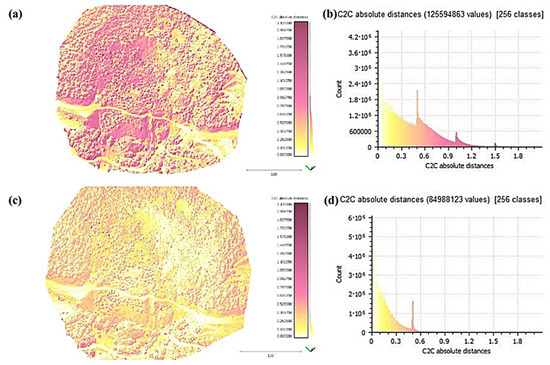
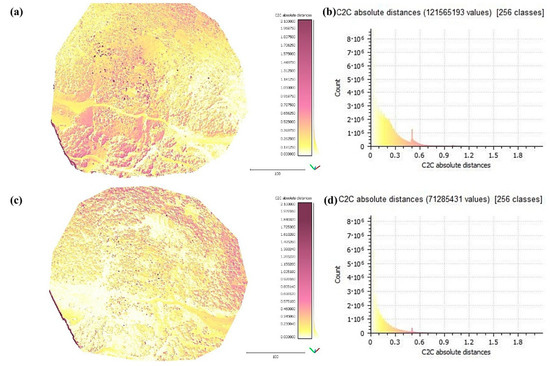
3.3. ارزیابی دقت ابرهای نقطه
4. بحث
5. نتیجه گیری ها
مشارکت های نویسنده
منابع مالی

بیانیه در دسترس بودن داده ها
تضاد علاقه
منابع
- گوبیت، ا. کوتلارسکی، اس. بنیستون، ام. هاینریش، جی. راجچاک، جی. Stoffel, M. تغییرات اقلیمی قرن بیست و یکم در کوه های آلپ اروپایی – مروری. علمی کل محیط. 2014 ، 493 ، 1138-1151. [ Google Scholar ] [ CrossRef ]
- ساوربورن، آر. ابی، ک. تغییرات آب و هوا و بلایای طبیعی – ادغام علم و عمل برای محافظت از سلامت. گلوب. Health Action 2012 , 5 , 19295. [ Google Scholar ] [ CrossRef ] [ PubMed ]
- Alcántara-Ayala، I.; آلتان، او. بیکر، دی. بریسنو، اس. کاتر، اس. گوپتا، اچ. هالووی، ای. اسماعیل زاده، ع. جیمنز دیاز، وی. جانستون، دی. و همکاران تحقیق و ارزیابی خطرات بلایا برای ارتقاء کاهش و مدیریت ریسک . اسماعیل زاده، ع.، کاتر، س.، ویرایش. ICSU: پاریس، فرانسه، 2015. [ Google Scholar ]
- Themistocleous، K. Danezis، C. نظارت بر سایتهای میراث فرهنگی متاثر از مخاطرات جغرافیایی با استفاده از دادههای درجا و SAR: مطالعه موردی Choirokoitia. در سنجش از دور برای باستانشناسی و مناظر فرهنگی – بهترین شیوهها و دیدگاهها در سراسر اروپا و خاورمیانه ؛ Hadjimitsis, DG, Themisloceous, K., Cuca, B., Agapiou, A., Lysandrou, V., Lasaponara, R., Masini, N., Schreirer, G., Eds. سنجش از دور Springer/Photogrammetry: Cham، سوئیس، 2020؛ شابک 978-3-030-10978-3. [ Google Scholar ]
- Garnica-Peña، RJ; Alcántara-Ayala، I. استفاده از پهپادها برای تحقیقات خطر بلایای زمین لغزش و مدیریت خطر بلایا: مروری بر ادبیات. J. Mt. Sci. 2021 ، 18 ، 482-498. [ Google Scholar ] [ CrossRef ]
- Themistocleous، K. Themistocleous، K. استفاده از پهپادها برای میراث فرهنگی و باستان شناسی. در سنجش از دور برای باستانشناسی و مناظر فرهنگی – بهترین شیوهها و دیدگاهها در سراسر اروپا و خاورمیانه ؛ Hadjimitsis, DG, Themisloceous, K., Cuca, B., Agapiou, A., Lysandrou, V., Lasaponara, R., Masini, N., Schreirer, G., Eds. سنجش از دور Springer/Photogrammetry: Cham، سوئیس، 2020؛ شابک 978-3-030-10978-3. [ Google Scholar ]
- Themistocleous، K. Hadjimitsis، DG; مایکلیدس، اس. اسپیزیچینو، دی جی; کروستا، گیگابایت؛ فرناندز مرودو، جی. Bee, E. بهترین روشها برای نظارت، کاهش و حفاظت از سایتهای میراث فرهنگی متاثر از مخاطرات جغرافیایی. در مجموعه مقالات EGU2018، وین، اتریش، 8 تا 13 آوریل 2018؛ جلد 20. [ Google Scholar ]
- نیکولاکوپولوس، KG; سوره، ک. کوکوولاس، IK; Argyropoulos، NG UAV در مقابل فتوگرامتری هوایی کلاسیک برای مطالعات باستان شناسی. J. Arch. علمی 2017 ، 14 ، 758-773 . [ Google Scholar ] [ CrossRef ]
- کووا، م. مونزا، م. گوارت، سی. گرکه، ام. Nex, F. استفاده از پهپاد برای ایجاد و به روز رسانی نقشه. مطالعه موردی در رواندا Surv. Rev. 2018 , 50 , 312–325. [ Google Scholar ] [ CrossRef ]
- مانچینی، اف. دوبینی، م. گاتلی، ام. استچی، اف. فابری، اس. Gabbianelli، G. استفاده از وسایل نقلیه هوایی بدون سرنشین (UAV) برای بازسازی توپوگرافی با وضوح بالا: ساختار از رویکرد حرکت در محیط های ساحلی. Remote Sens. 2013 , 5 , 6880–6898. [ Google Scholar ] [ CrossRef ]
- پیراس، م. تادیا، جی. Forno، MG; گاتیگلیو، ام. آیکاردی، آی. دابوو، پ. لو روسو، اس. Lingua، A. نقشه برداری دقیق زمین شناسی در مناطق کوهستانی با استفاده از یک وسیله نقلیه هوایی بدون سرنشین: کاربرد در دره رودورتو، آلپ شمال غربی ایتالیا. ژئومات. نات. خطر خطرات 2017 ، 8 ، 137-149. [ Google Scholar ] [ CrossRef ]
- Themistocleous، K. استفاده از پهپادها برای نظارت بر سایتهای باستانشناسی: مطالعه موردی Choirokoitia در پروژه PROTHEGO. در مجموعه مقالات پنجمین کنفرانس بین المللی سنجش از دور و اطلاعات جغرافیایی محیط زیست، پافوس، قبرس، 20 تا 23 مارس 2017. [ Google Scholar ]
- گائو، ام. خو، X. کلینگر، ی. ون در وورد، جی. Tapponnier، P. نقشه برداری با وضوح بالا بر اساس یک وسیله نقلیه هوایی بدون سرنشین (UAV) برای ثبت تغییرات دیرینه لرزه ای در امتداد گسل Altyn-Tagh، چین. علمی Rep. 2017 , 7 , 8281. [ Google Scholar ] [ CrossRef ]
- بالدی، پ. کولتلی، م. فابریس، م. مارسلا، ام. توماسی، ص. فتوگرامتری با دقت بالا برای نظارت بر تکامل جناح شمال غربی آتشفشان استرومبولی در طول و پس از فوران 2002-2003. گاو نر آتشفشان 2008 ، 70 ، 703-715. [ Google Scholar ] [ CrossRef ]
- راو، جی. جان، جی پی. Lo, CF; نقشه برداری زمین لغزش Lin, YS با استفاده از تصاویر بدست آمده توسط یک پهپاد بال ثابت. بین المللی قوس. فتوگرام 2012 ، 38 ، 195-200. [ Google Scholar ] [ CrossRef ]
- روسی، جی. تانتری، ال. طوفانی، وی. وانوچی، پی. مورتی، اس. Casagli، N. بررسی های پهپاد چند زمانی برای نقشه برداری زمین لغزش و خصوصیات. زمین لغزش 2018 ، 15 ، 1045-1052. [ Google Scholar ] [ CrossRef ]
- کیریو، ا. نیکولاکوپولوس، ک. کوکوولاس، آی. لامپروپولو، پی. کمپینهای مکرر پهپاد، اندازهگیریهای GNSS، GIS و تحلیلهای پتروگرافی برای نقشهبرداری و پایش زمین لغزش. Minerals 2021 , 11 , 300. [ Google Scholar ] [ CrossRef ]
- Themistocleous، K. دانزیس، سی. نظارت بر سایت های میراث فرهنگی تحت تأثیر مخاطرات زمین. در منابع زمین و کاربردهای سنجش از دور محیطی/GIS IX ; انجمن بین المللی اپتیک و فوتونیک: واشنگتن، دی سی، ایالات متحده آمریکا، 2018. [ Google Scholar ] [ CrossRef ]
- Themistocleous، K. دانزیس، سی. مندونیدیس، ای. Lymperopoulou، E. نظارت بر تغییر شکل زمین سایتهای میراث فرهنگی با استفاده از پهپاد و تکنیکهای ژئودتیک: مطالعه موردی Choirokoitia، پروژه JPI PROTHEGO. در منابع زمین و کاربردهای سنجش از دور محیطی/GIS VIII، مجموعه مقالات کنفرانس سنجش از دور SPIE، ورشو، لهستان، 11–14 سپتامبر 2017 . SPIE: واشنگتن، دی سی، ایالات متحده آمریکا، 2017; جلد 10428. [ Google Scholar ] [ CrossRef ]
- امرالله، سی. سووردحی، د. Meilano، I. اثر دقت محصول استفاده از دوربین دیجیتال غیر متریک مایل و عمودی در فتوگرامتری پهپاد برای تعیین صفحه خطا. ISPRS Ann. فتوگرام حسگر از راه دور اسپات. Inf. علمی 2016 ، 3 ، 41-48. [ Google Scholar ] [ CrossRef ]
- Meinen، BU; رابینسون، DT نقشه برداری فرسایش و رسوب در یک چشم انداز کشاورزی: بهینه سازی طرح های بدست آوردن تصویر پهپاد برای SfM-MVS. سنسور از راه دور محیط. 2020 ، 239 ، 111666. [ Google Scholar ] [ CrossRef ]
- کازلا، وی. فرانزینی، ام. مدلسازی سطوح شیب دار با پیکربندی های مختلف فتوگرامتری نادر و مایل. ISPRS Ann. فتوگرام حسگر از راه دور اسپات. Inf. علمی 2016 ، 3 ، 175-182. [ Google Scholar ] [ CrossRef ]
- روسی، پی. مانچینی، اف. دوبینی، م. مازون، اف. کاپرا، الف. ترکیب تصاویر پهپاد نادر و مورب برای بازسازی توپوگرافی معدن: روششناسی و تحلیل امکانسنجی. یورو J. Remote Sens. 2017 ، 50 ، 211-221. [ Google Scholar ] [ CrossRef ]
- لینگوا، ا. نواردو، اف. اسپانو، آ. سنا، س. Matrone، F. تولید مدل سه بعدی با استفاده از تصاویر مایل به دست آمده توسط پهپاد. ISPRS Ann. فتوگرام حسگر از راه دور اسپات. Inf. علمی 2017 ، 42 ، 107-115. [ Google Scholar ] [ CrossRef ]
- واکا، جی. دسی، آ. Sacco, A. استفاده از تصاویر پهپاد نادر و مایل برای ایجاد دانش. ISPRS Int. J. Geo-Inf. 2017 ، 6 ، 393. [ Google Scholar ] [ CrossRef ]
- Tu، Y.-H.; یوهانسن، ک. آراگون، بی. Stutsel، BM; فرشته، ی. کامارگو، OAL؛ المشهراوی، SKM; جیانگ، جی. زیلیانی، MG; McCabe، MF ترکیب تصاویر نادر، مایل و نما، بازسازی سازندهای سنگی را با استفاده از وسایل نقلیه هوایی بدون سرنشین افزایش می دهد. IEEE Trans. Geosci. Remote Sens. 2021 ، 1-13. [ Google Scholar ] [ CrossRef ]
- استرونر، ام. شهری، ر. ریندل، تی. سیدل، ج. Brouček, J. ارزیابی دقت ژورفرانس یک مدل فتوگرامتری با استفاده از کوادروکوپتر با GNSS RTK آنبرد. Sensors 2020 , 20 , 2318. [ Google Scholar ] [ CrossRef ] [ PubMed ]
- استرونر، ام. شهری، ر. سیدل، ج. ریندل، تی. Brouček, J. فتوگرامتری با استفاده از GNSS RTK نصب شده در پهپاد: استراتژی های ارجاع جغرافیایی بدون GCP. Remote Sens. 2021 , 13 , 1336. [ Google Scholar ] [ CrossRef ]
- تپاتی لوس، ال. چیابراندو، اف. جولیو تونولو، اف. افزایش به موقع بودن نقشه برداری پهپاد در مقیاس بزرگ. رویکردهای ارجاع جغرافیایی مستقیم: استراتژی های عملیاتی و بهترین شیوه ها. ISPRS Int. J. Geo-Inf. 2020 ، 9 ، 578. [ Google Scholar ] [ CrossRef ]
- التنر، ا. سوفیا، جی. فصل 1-ساختار از تکنیک فتوگرامتری حرکتی. در تحولات در فرآیندهای سطح زمین ; Tarolli, P., Mudd, SM, Eds. الزویر: آمستردام، هلند، 2020؛ جلد 23، ص 1-24. [ Google Scholar ]
- وستوبی، ام. براسینگتون، جی. گلسر، ن. هامبری، م. رینولدز، جی. فتوگرامتری “ساختار از حرکت”: ابزاری کم هزینه و موثر برای کاربردهای علوم زمین. ژئومورفولوژی 2012 ، 179 ، 300-314. [ Google Scholar ] [ CrossRef ]
- میچلتی، ن. چندلر، جی. Lane, SN فصل 2-ساختار از فتوگرامتری حرکتی (SFM). در تکنیک های ژئومورفولوژی ; بخش 2.2; انجمن بریتانیایی برای ژئومورفولوژی: لندن، بریتانیا، 2015. [ Google Scholar ]
- راهنمای Photoscan. در دسترس آنلاین: https://www.agisoft.com/pdf/photoscan-pro_1_1_en.pdf (در 27 فوریه 2021 قابل دسترسی است).
- نیکولاکوپولوس، ک. کیریو، ا. کوکوولاس، آی. زیگوری، وی. آپوستولوپولوس، دی. ترکیبی از فتوگرامتری هوایی، ماهوارهای و پهپاد برای نقشهبرداری تکامل خط ساحلی دیاکرونیک: مورد جزیره لفکادا. ISPRS Int. J. Geo-Inf. 2019 ، 8 ، 489. [ Google Scholar ] [ CrossRef ]
- ArcMap (مرکز میانگین). در دسترس آنلاین: https://desktop.arcgis.com/en/arcmap/latest/tools/spatial-statistics-toolbox/mean-center.htm (در 2 مارس 2021 قابل دسترسی است).
- Mitchell, A. The ESRI Guide to GIS Analysis , 1st ed.; ESRI Press: Redlands, CA, USA, 2005; جلد 2. [ Google Scholar ]
- ArcMap (تحلیل نزدیک). در دسترس آنلاین: https://desktop.arcgis.com/en/arcmap/10.3/tools/analysis-toolbox/near.htm (در 2 مارس 2021 قابل دسترسی است).
- Congalton، RG; گرین، ک. ارزیابی دقت اصول و روشهای دادههای سنجش از دور . CRC Press: Boca Raton، FL، USA، 2009. [ Google Scholar ]
- چن، ی. مدیونی، جی. مدلسازی شی با ثبت تصاویر چند دامنه. تصویر Vis. محاسبه کنید. 1992 ، 10 ، 145-155. [ Google Scholar ] [ CrossRef ]
- Mesas-Carrascosa، FJ; رومبائو، آی سی; Berrocal، JAB; پوراس، AG-F. ارزیابی کیفیت موقعیت عکسهای ارتوفت بهدستآمده از سنسورهای روی پلتفرمهای پهپاد چند روتوری. Sensors 2014 , 14 , 22394–22407. [ Google Scholar ] [ CrossRef ] [ PubMed ]
- آگوئرا-وگا، اف. کارواخال رامیرز، اف. Martínez-Carricondo، P. دقت مدلهای سطح دیجیتال و عکسهای اورتوفوتو برگرفته از فتوگرامتری وسایل نقلیه هوایی بدون سرنشین. J. Surv. مهندس 2017 , 143 , 04016025. [ Google Scholar ] [ CrossRef ]
- گیندراکس، اس. بوش، آر. Farinotti، D. ارزیابی دقت مدلهای سطح دیجیتال از تصاویر وسایل نقلیه هوایی بدون سرنشین بر روی یخچالها. Remote Sens. 2017 , 9 , 186. [ Google Scholar ] [ CrossRef ]
- جیمز، MR; رابسون، اس. پینکرتون، اچ. توپ، M. فتوگرامتری مایل با تصاویر مرئی و حرارتی از جریان های گدازه فعال. گاو نر آتشفشان 2006 ، 69 ، 105-108. [ Google Scholar ] [ CrossRef ]
- جیمز، MR; پینکرتون، اچ. رابسون، اس. اندازهگیری تغییرات شار مبتنی بر تصویر در نواحی دیستال جریانهای گدازه فعال. ژئوشیمی. ژئوفیز. Geosyst. 2007 ، 8 ، Q03006. [ Google Scholar ] [ CrossRef ]
- آیکاردی، آی. چیابراندو، اف. گراسو، ن. Lingua، AM؛ نواردو، اف. اسپانو، A. فتوگرامتری پهپاد با تصاویر مایل: اولین تحلیل در مورد جمع آوری و پردازش داده ها. در مجموعه مقالات آرشیو بین المللی فتوگرامتری، سنجش از دور و علوم اطلاعات مکانی. در مجموعه مقالات کنگره XXIII ISPRS، پراگ، جمهوری چک، 12 تا 19 ژوئیه 2016. جلد XLI-B1. [ Google Scholar ]
- Nesbit، PR; Hugenholtz، CH افزایش دقت مدل سه بعدی UAV-SfM در مناظر با برجستهسازی بالا با ترکیب تصاویر مایل. Remote Sens. 2019 , 11 , 239. [ Google Scholar ] [ CrossRef ]
- Mosbrucker، AR; سرگرد، جی جی. اسپایسر، KR؛ Pitlick، J. ملاحظات سیستم دوربین برای کاربردهای ژئومورفیک فتوگرامتری SfM. گشت و گذار در زمین. روند. Landf. 2017 ، 42 ، 969-986. [ Google Scholar ] [ CrossRef ]
- جیمز، MR; رابسون، اس. کاهش خطای سیستماتیک در مدل های توپوگرافی مشتق شده از پهپاد و شبکه های تصویری زمینی. گشت و گذار در زمین. روند. Landf. 2014 ، 39 ، 1413-1420. [ Google Scholar ] [ CrossRef ]
- سامارتانو، جی. چیابراندو، اف. Spanò، A. تصاویر مایل و فتوگرامتری مستقیم با سکوی بال ثابت: اولین آزمایش و نتایج در Hierapolis of Phrygia (TK). بین المللی قوس. فتوگرام حسگر از راه دور اسپات. Inf. علمی 2020 ، 43 ، 75-82. [ Google Scholar ] [ CrossRef ]
- آلگانچی، U. بسول، بی. Sertel، E. ارزیابی دقت مدلهای سطح دیجیتال مختلف. ISPRS Int. J. Geo-Inf. 2018 ، 7 ، 114. [ Google Scholar ] [ CrossRef ]
- وسل، بی. هوبر، ام. وولفارت، سی. مارشالک، یو. کوسمان، دی. Roth، A. ارزیابی دقت مدل جهانی ارتفاع دیجیتال TanDEM-X با داده های GPS. ISPRS J. Photogramm. Remote Sens. 2018 , 139 , 171–182. [ Google Scholar ] [ CrossRef ]
- الخرچی، اول. ارزیابی دقت عمودی برای مدلهای ارتفاعی دیجیتال SRTM و ASTER: مطالعه موردی شهر نجران، عربستان سعودی. مهندس عین شمس J. 2018 ، 9 ، 1807–1817. [ Google Scholar ] [ CrossRef ]
- Hobi، ML; Ginzler, C. ارزیابی دقت مدلهای سطح دیجیتال بر اساس دادههای سنجش از راه دور استریو WorldView-2 و ADS80. Sensors 2012 , 12 , 6347-6368. [ Google Scholar ] [ CrossRef ] [ PubMed ]
- احمد فواد، ن. یوسف، آر. اسماعیل، ز. مجید، ز. مقایسه عملکرد روشهای ثبت ابر نقطهای برای پایش زمین لغزش با استفاده از دادههای اسکن لیزری سیار. در مجموعه مقالات آرشیو بین المللی فتوگرامتری، سنجش از دور و علوم اطلاعات فضایی، کنفرانس بین المللی ژئوماتیک و فناوری جغرافیایی (GGT 2018)، کوالالامپور، مالزی، 3 تا 5 سپتامبر 2018؛ جلد XLII-4/W9. [ Google Scholar ] [ CrossRef ]


12 نظرات