

خلاصه
کلید واژه ها:
دریاچه پویانگ ؛ روش اوتسو ؛ موتور گوگل ارث ؛ وقوع آب ؛ دینامیک هیدرولوژیکی ; مساحت آب تغییر می کند
1. معرفی
-
روش Otsu را پیاده سازی کنید و اسکریپت های قابل استفاده مجدد بنویسید تا به طور خودکار آستانه های استخراج آب های سطحی را با استفاده از داده های Sentinel-1 در Google Earth Engine انتخاب کنید.
-
تجزیه و تحلیل مزایا و معایب یک طبقه بندی کننده بدون نظارت از هر دو دیدگاه ریاضی و کاربردی
-
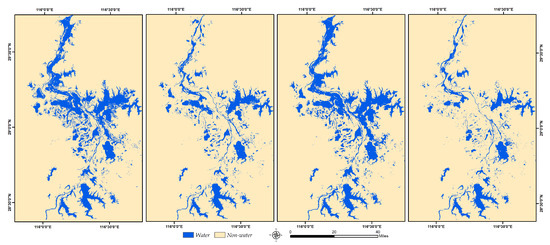
با نقشه برداری از سطح آب دریاچه در ژانویه 2017، 2018، 2019 و 2020 به پایگاه دانش تغییرات هیدرولوژیکی دریاچه پویانگ کمک کنید.
2. مواد و روشها
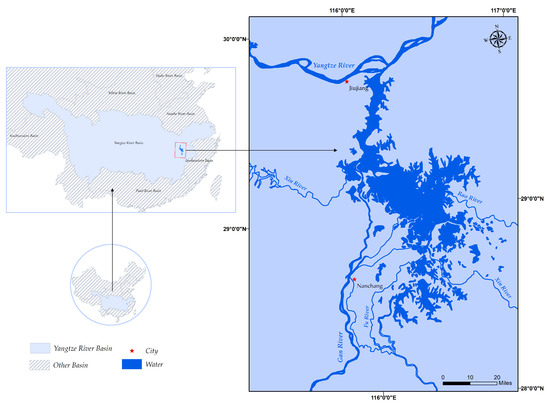
2.1. منطقه مطالعه
2.2. پلتفرم و داده ها
2.3. روش اوتسو
-
مجموعه C مجموعه شاخص همه عناصر است.
-
i شاخص عنصر i-امین است، جایی کهمن∈سیبه عنصر i- امین متعلق به کل مجموعه C که ما در نظر می گیریم اشاره دارد. ایکسمنمقدار این عنصر i است و بدون از دست دادن کلیت، میتوانیم آن را فرض کنیم ایکسمنمرتب شده اند. به صراحت، ایکسمن<ایکسj، اگر من<j، برای من،j∈سی.
-
پمناحتمال یا چگالی عنصر i است. واضح است که ∑من∈سیپمن=1.
-
ما سعی می کنیم مجموعه C را به دو گروه فرعی جدا از هم تقسیم کنیم سی0، سی1، جایی که سی0،سی1⊂سیو سی0⋃˙سی1=سی.
-
μjمرکز یا مقدار میانگین خوشه است سیj، برای j=0،1:
μj=∑من∈سیjپمن·ایکسمن∑من∈سیjپمن، برای j=0،1
-
μمرکز یا مقدار میانگین کل مجموعه C است :
μ=∑من∈سیپمن·ایکسمن=∑من∈سی0⋃˙سی1پمن·ایکسمن
-
Vjبه عنوان واریانس درونی خوشه نشان داده می شود سیj، که به عنوان جمع وزنی مجذور فاصله خوشه تعریف می شود سیjهر نقطه داده از مرکز خود است μj، برای j=0،1:
Vj=∑من∈سیjپمن·(ایکسمن-μj)2، برای j=0،1
-
V0،1به عنوان واریانس بین کلاسی بین خوشه نشان داده می شود سی0و خوشه سی1[ 25 ]، که به عنوان جمع وزنی مجذور فاصله مرکز هر خوشه تعریف می شود. μjاز مرکز کل مجموعه μ:
V0،1=∑j=0،1((∑من∈سیjپمن)·(μj-μ)2)
-
V به عنوان واریانس کل نشان داده می شود، که به عنوان جمع وزنی فاصله مجذور تمام نقاط داده از مرکز کل مجموعه تعریف می شود. μ. علاوه بر این، میتوانیم ببینیم که V در واقع دقیقاً واریانس است σسی2از مجموعه C :
V=∑من∈سیپمن·(ایکسمن-μ)2
ایده اصلی روش Otsu به حداقل رساندن جمع واریانس درونی است Vjاز همه خوشه ها سیjکه واریانس درون کلاسی [ 25 ] نامیده می شود. واریانس داخلی یک خوشه مجموع فاصله مجذور هر عنصر تا مرکز خوشه را همانطور که تعریف کردیم نشان می دهد و مقدار کوچکتر واریانس داخلی فاصله نزدیکتر هر نقطه را به مرکز خوشه نشان می دهد. رابطه نزدیکتر یا شباهت بالاتری را نشان می دهد که عناصر در این خوشه به اشتراک می گذارند. بنابراین، بهترین جداسازی کل مجموعه عناصر باید عناصر مشابه را تا حد امکان بهینه در یک خوشه گروه بندی کند. در ریاضیات، این معادل به حداقل رساندن مجموع واریانس درونی در هر خوشه است. تابع هدف به صورت زیر فرموله می شود:
دقیقهسی0،سی1∑j=0،1Vj=دقیقهسی0،سی1∑j=0،1∑من∈سیjپمن·(ایکسمن-μj)2
علاوه بر این، مجموع واریانس درونی هر خوشه و واریانس بین طبقاتی باید برابر با کل واریانس کل مجموعه [ 25 ] باشد که برای یک مجموعه داده ثابت ثابت است.
V=∑j=0،1Vj+V0،1
بنابراین، تابع هدف قبلی معادله (1) معادل به حداکثر رساندن واریانس بین کلاسی است. V0،1:
حداکثرسی0،سی1∑j=0،1((∑من∈سیjپمن)·(μj-μ)2)
-
مجموعه تمام مقادیر bin ممکن در هیستوگرام چگالی به عنوان Θ، که فضای فرضیه برای تخمین آستانه نیز می باشد.
-
چگالی مربوط به سطل با مقدار θبه عنوان مشخص می شود پθو باید داشته باشیم 1=∑θ∈Θپθ.
-
برای هر مقدار bin θ∈Θ، می توانیم یک شاخص مربوطه قرار دهیم منθبه مجموعه نمایه شده C ، که در آن منθ-امین bin در هیستوگرام چگالی دارای مقدار bin است θ. از این رو، ایکسمنθ=θو پمنθبرابر چگالی است پθسطل با ارزش θاز هیستوگرام چگالی
-
پیش بینی نهایی آستانه به صورت نشان داده می شود θ^∈Θ، که مربوط به شاخص است منθ^∈سی.
-
دو خوشه مجزا که توسط یک آستانه تشکیل شده اند θاست سی0={من:من<منθ،من∈سی}و سی1={من:من≥منθ،من∈سی}.
تخمین نهایی آستانه θ^باید یکی باشد که بر اساس آن خرده خوشه سی0*و سی1*می تواند به مقدار بهینه تابع هدف در رابطه (3) برسد. سپس، می توانیم داشته باشیم:
منθ^=دقیقهمن∈سی1*من
θ^=ایکسمنθ^
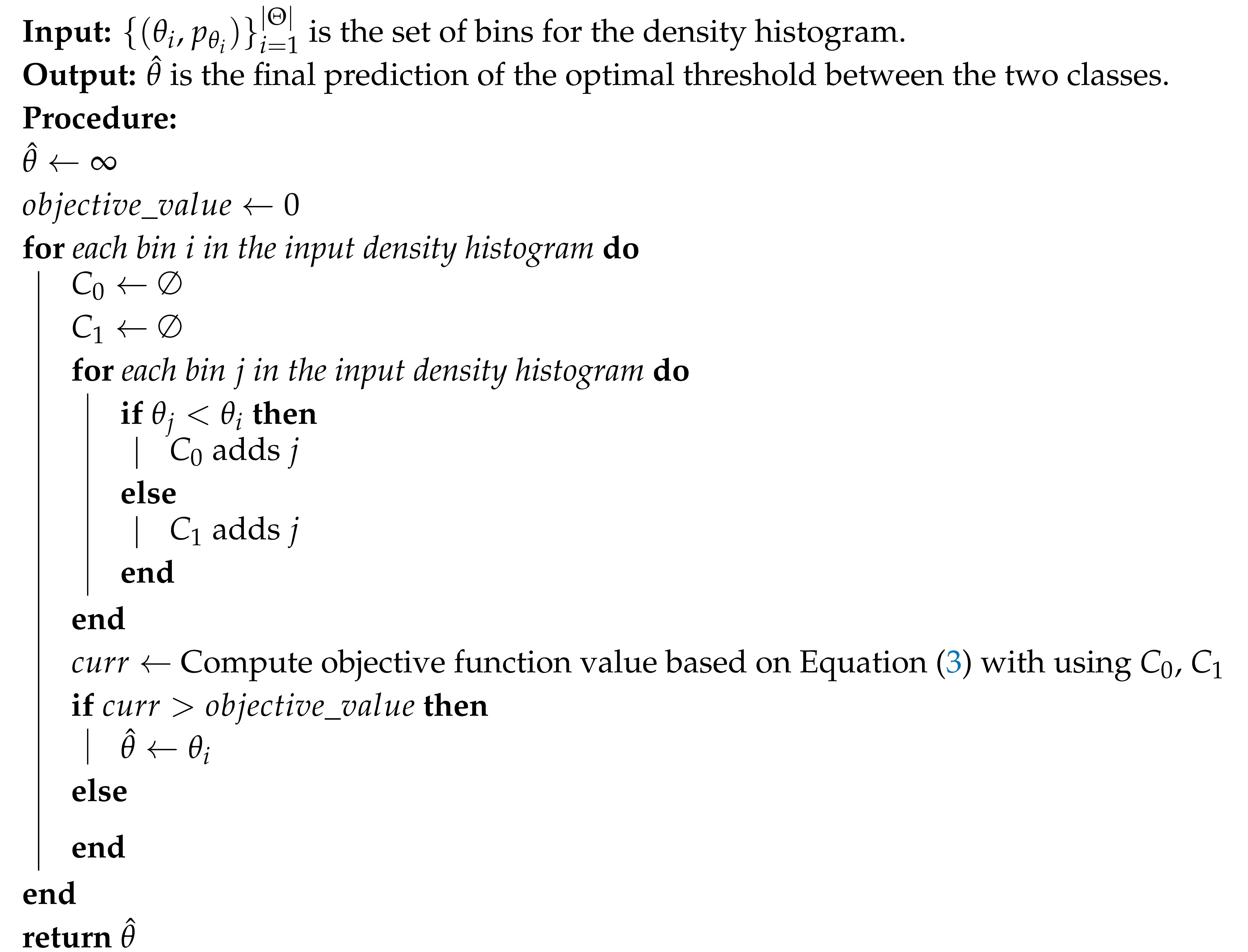
این مسئله بهینه سازی را می توان در حداکثر زمان چند جمله ای درجه دوم به اندازه مجموعه محدود حل کرد. Θ، یعنی پیچیدگی زمانی خواهد بود O(|Θ|2). یکی از پیاده سازی های ممکن همانطور که در الگوریتم 1 نشان داده شده است، تکرار در مجموعه محدود و ثبت عنصری در مجموعه است که بالاترین مقدار را برای تابع هدف ارائه می دهد. هر تکرار داخلی برای محاسبه تابع هدف به زمان خطی نیاز دارد.
| الگوریتم 1: OtsuMethodFindOptimal Thresholding (زمان: O(|Θ|2)) |
 |
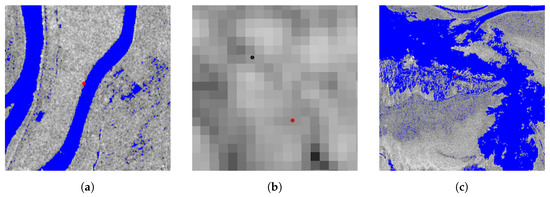
2.4. تشخیص آب
2.5. ارزیابی دقت
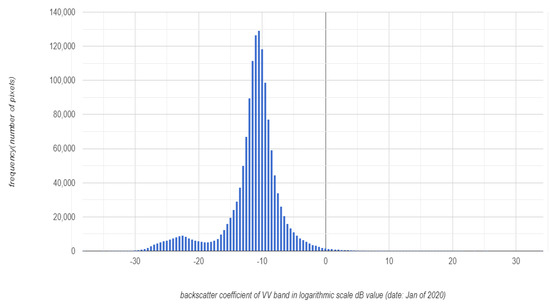
نقطه x را با برچسب واقعی آن y که از توزیع واقعی گرفته شده است نشان می دهیمDمانند (ایکس،y)∼D، جایی که توزیع واقعی است Dدر واقع ناشناخته است به طور خاص، x مقدار dB رادار برای یک پیکسل است و به صورت زیر تعریف می شود:
y=1،اگر را درست است، واقعی برچسب از ایکس است اب0،اگر را درست است، واقعی برچسب از ایکس است غیر-اب
بر اساس برآورد آستانه بهینه θ^از روش Otsu میتوانیم پیشبینی برچسب را ارائه دهیم y^برای نقطه x به صورت:
y^=fθ^(ایکس)=𝟙ایکس<θ^
جایی که،
𝟙ایکس<θ^=1،اگر ایکس<θ^0،در غیر این صورت
دقت توافق بین استاندارد فرض شده صحیح و تصویر طبقه بندی شده با کیفیت ناشناخته را اندازه می گیرد [ 43 ]. خطاهای طبقه بندی زمانی رخ می دهد که یک پیکسل (یا ویژگی) متعلق به یک دسته به دسته دیگری اختصاص داده شود. خطاهای حذف زمانی رخ می دهد که یک ویژگی از دسته ای که در حال ارزیابی است کنار گذاشته شود. خطاهای کارمزد زمانی رخ می دهد که یک ویژگی به اشتباه در دسته مورد ارزیابی گنجانده شود [ 44 ]. خطای حذف در یک دسته به عنوان اشتباه در کمیسیون در دسته دیگر محسوب می شود. به طور واضح، برای مقدار dB یک پیکسل x و برچسب واقعی آن y از توزیع واقعی ناشناخته D، خطا زمانی رخ می دهد که y^≠y. بنابراین، دقت را می توان از نظر ریاضی به صورت زیر تعریف کرد:
آججتوrآجy=E(ایکس،y)∼D𝟙y^=y
از زمان توزیع واقعی Dناشناخته است، نمی توان دقت را از طریق رابطه (7) محاسبه کرد. بنابراین، برای تخمین چنین دقتی به یک برآوردگر نیاز داریم. یک راه ممکن برای تخمین بر اساس توزیع تجربی [ 45 ] است. یک مجموعه تست تی={(ایکسمن،yمن)}من=1n، که یک توزیع تجربی را تشکیل می دهد D^، برای تقریب توزیع واقعی استفاده می شود D، جایی که هر عنصر (ایکسمن،yمن)به طور مستقل و یکسان ( iid ) از توزیع واقعی استخراج می شود D.
{(ایکسمن،yمن)}من=1n∼من.من.دD
تخمینگر تجربی دقت آججتوrآجy^برای تابع طبقه بندی fθ^را می توان به صورت زیر بیان کرد:
آججتوrآجy^=1n·∑(ایکسمن،yمن)∈تی𝟙y^من=yمن،wساعتهrهy^من=fθ^(ایکسمن)
اثبات Unbias Estimator.
E[آججتوrآجy^]=E[1n·∑(ایکسمن،yمن)∈تی𝟙y^من=yمن]=1n·∑(ایکسمن،yمن)∈تیE[𝟙y^من=yمن]=من.من.د1n·∑(ایکسمن،yمن)∈تیE(ایکس،y)∼D[𝟙y^=y]=1n·n·E(ایکس،y)∼D[𝟙y^=y]=E(ایکس،y)∼D[𝟙y^=y]=آججتوrآجy
□
3. نتایج و بحث
3.1. ماتریس سردرگمی
3.2. منطقه آب
4. نتیجه گیری
اختصارات
در این نسخه از اختصارات زیر استفاده شده است:
| SAR | رادار دیافراگم مصنوعی |
| GEE | موتور Google Earth |
| API | رابط برنامه نویسی کاربردی |
منابع
- پکل، جی اف. کوتام، ا. گولیک، ن. Belward، AS نقشه برداری با وضوح بالا از آب های سطحی جهانی و تغییرات طولانی مدت آن. طبیعت 2016 ، 540 ، 418-422. [ Google Scholar ] [ CrossRef ]
- داونینگ، جی. پریری، ی. کول، جی. دوارته، سی. ترانویک، ال. استریگل، آر جی. مک داول، دبلیو. کورتلاینن، پی. کاراکو، ن. ملاک، جی. و همکاران فراوانی جهانی و توزیع اندازه دریاچه ها، حوضچه ها و آبگیرها. لیمنول. Oceanogr. 2006 ، 51 ، 2388-2397. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- بارو، CJ منابع آب و توسعه کشاورزی در مناطق استوایی ; Routledge: لندن، انگلستان؛ نیویورک، نیویورک، ایالات متحده آمریکا، 2016. [ Google Scholar ]
- آهنگ، JH; کانگ، ام اس؛ آهنگ، من. ژوئن، SM بیلان آب در مخازن آبیاری با در نظر گرفتن کنترل سیلاب و تغییرات راندمان آبیاری. جی. ایریگا. زه کشی. مهندس 2016 , 142 , 04016003. [ Google Scholar ] [ CrossRef ]
- هوانگ، ز. لو، ال. جیائو، جی. جیانگ، جی. Ye, Q. تجزیه و تحلیل همبستگی بین عوامل محیطی و جرثقیل های نادر در منطقه دریاچه پویانگ چین. J. Great Lakes Res. 2018 ، 44 ، 140-148. [ Google Scholar ] [ CrossRef ]
- پریجنت، سی. پاپا، اف. آیرس، اف. خیمنز، سی. راسو، دبلیو. Matthews, E. تغییرات در دینامیک آبهای سطح زمین از دهه 1990 و ارتباط با فشار جمعیت. ژئوفیز. Res. Lett. 2012 ، 39 . [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- هولگرسون، MA; Raymond, PA سهم بزرگی در انتشار CO 2 و CH 4 آب داخلی از حوضچه های بسیار کوچک. نات. Geosci. 2016 ، 9 ، 222-226. [ Google Scholar ] [ CrossRef ]
- گاردنر، آرسی؛ بارچیزی، اس. بلترام، سی. فینلیسون، سی. گالوسکی، تی. هریسون، آی. پاگانینی، م. پرینو، سی. پریچارد، دی. روزنکویست، ا. و همکاران وضعیت تالاب های جهان و خدمات آنها به مردم: مجموعه ای از تحلیل های اخیر . یادداشت توجیهی رامسر شماره 7; دبیرخانه کنوانسیون رامسر: گلند، سوئیس، 2015. [ Google Scholar ] [ CrossRef ][ Green Version ]
- De Amorim، WS; والدوگا، آی بی; ریبیرو، JMP; ویلیامسون، وی جی. کراوزر، جنرال الکتریک؛ ماگتوتو، MK; de Andrade، JBSO رابطه بین آب، انرژی و غذا در زمینه خطرات جهانی: تجزیه و تحلیل تعاملات بین غذا، آب و امنیت انرژی. محیط زیست ارزیابی تاثیر Rev. 2018 , 72 , 1-11. [ Google Scholar ] [ CrossRef ]
- Vörösmarty، CJ; گرین، پ. سالزبری، جی. Lammers، RB منابع آب جهانی: آسیب پذیری از تغییرات آب و هوا و رشد جمعیت. Science 2000 , 289 , 284-288. [ Google Scholar ] [ CrossRef ] [ PubMed ][ نسخه سبز ]
- ون دایک، هوش مصنوعی؛ بک، او؛ کراسبی، RS; de Jeu، RA; لیو، YY; پودگر، جنرال موتورز; تیمبال، بی. Viney، NR خشکسالی هزاره در جنوب شرقی استرالیا (2001-2009): علل و پیامدهای طبیعی و انسانی برای منابع آب، اکوسیستم، اقتصاد و جامعه. منبع آب Res. 2013 ، 49 ، 1040-1057. [ Google Scholar ] [ CrossRef ]
- هیپسی، ام آر. بروس، ال سی؛ بون، سی. بوش، بی. کری، سی سی; همیلتون، DP; هانسون، رایانه شخصی؛ Read, JS; دی سوزا، ای. وبر، ام. و همکاران یک مدل دریاچه عمومی (GLM 3.0) برای پیوند با دادههای حسگر فرکانس بالا از شبکه جهانی رصدخانه اکولوژیکی دریاچه (GLEON). Geosci. مدل Dev. 2019 ، 12 ، 473-523. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- کمپبل، جی بی. Wynne, RH مقدمه ای بر سنجش از دور . Guilford Press: نیویورک، نیویورک، ایالات متحده آمریکا، 2011. [ Google Scholar ]
- سان، جی. چن، ایکس. رن، جی. ژانگ، ا. Jia, X. تجزیه و تحلیل مخلوط طیفی طبقه بندی شده تصاویر با وضوح متوسط برای نقشه برداری سطح غیرقابل نفوذ. بین المللی J. Appl. زمین Obs. Geoinf. 2017 ، 60 ، 38-48. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- بوستتو، ال. مرونی، م. Colombo, R. ترکیب داده های ماهواره ای با وضوح فضایی متوسط و درشت برای بهبود تخمین سری های زمانی NDVI زیر پیکسل. سنسور از راه دور محیط. 2008 ، 112 ، 118-131. [ Google Scholar ] [ CrossRef ]
- Woodcock، CE; آلن، آر. اندرسون، ام. بلوارد، ا. بیندشادلر، آر. کوهن، دبلیو. گائو، اف. گووارد، SN; هلدر، دی. هلمر، ای. و همکاران دسترسی رایگان به تصاویر لندست. Science 2008 , 320 , 1011. [ Google Scholar ] [ CrossRef ]
- جوشی، ن. باومن، ام. ایهامر، ا. فنشولت، آر. گروگان، ک. هاسترت، پ. جپسن، ام.آر. کومرل، تی. میفرویت، پ. میچارد، ای تی. و همکاران مروری بر کاربرد ادغام داده های سنجش از دور نوری و راداری برای نقشه برداری و پایش کاربری زمین. Remote Sens. 2016 ، 8 ، 70. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- بیورسیتا، اف. پوسانت، ا. استامف، ا. Malet، JP روشی برای نقشه برداری خودکار و سریع سطوح آب از تصاویر نگهبان-1. Remote Sens. 2018 , 10 , 217. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- توله، ا. کائو، دبلیو. پلانک، اس. نقشه برداری سیل مبتنی بر مارتینیس، S. Sentinel-1: یک زنجیره پردازش کاملاً خودکار. بین المللی J. Remote Sens. 2016 ، 37 ، 2990-3004. [ Google Scholar ] [ CrossRef ]
- بله، ی. بروزون، ال. شان، جی. بوولو، اف. Zhu, Q. یک چارچوب تطبیق سریع و قوی برای ثبت تصویر سنجش از راه دور چندوجهی. arXiv 2018 , arXiv:1808.06194. [ Google Scholar ]
- گولیک، ن. هنچر، م. دیکسون، ام. ایلیوشچنکو، اس. تاو، دی. Moore, R. Google Earth Engine: تجزیه و تحلیل جغرافیایی در مقیاس سیاره ای برای همه. سنسور از راه دور محیط. 2017 ، 202 ، 18-27. [ Google Scholar ] [ CrossRef ]
- شومان، GJP; Moller، DK مایکروویو سنجش از راه دور طغیان سیل. فیزیک شیمی. قطعات زمین ABC 2015 ، 83 ، 84-95. [ Google Scholar ] [ CrossRef ]
- زینگ، ال. تانگ، ایکس. وانگ، اچ. فن، دبلیو. وانگ، جی. پایش دینامیک ماهانه آب های سطحی دریاچه دانگتینگ با استفاده از داده های Sentinel-1 در 10 متر. PeerJ 2018 ، 6 ، e4992. [ Google Scholar ] [ CrossRef ]
- Wolynetz, M. Algorithm AS 138: تخمین حداکثر احتمال از داده های معمولی محدود و سانسور شده. JR Stat. Soc. سر. C Appl. آمار 1979 ، 28 ، 185-195. [ Google Scholar ] [ CrossRef ]
- Otsu، N. روش انتخاب آستانه از هیستوگرام های سطح خاکستری. IEEE Trans. سیستم مرد سایبرن. 1979 ، 9 ، 62-66. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- والا، HJ; Baxi، A. مروری بر الگوریتم تقسیمبندی تصویر Otsu. بین المللی J. Adv. Res. محاسبه کنید. مهندس تکنولوژی IJARCET 2013 ، 2 ، 387-389. [ Google Scholar ]
- آن، ک. ژانگ، جی. Xiao، Y. نظارت پویا شهری شی گرا – مطالعه موردی منطقه Haidian پکن. چانه. Geogr. علمی 2007 ، 17 ، 236-242. [ Google Scholar ] [ CrossRef ]
- یو، اف. سان، دبلیو. لی، جی. ژائو، ی. ژانگ، ی. Chen, G. روش بهبود یافته Otsu برای تشخیص نشت نفت از تصاویر SAR. Oceanologia 2017 ، 59 ، 311-317. [ Google Scholar ] [ CrossRef ]
- بله، X. لی، ایکس. Xu، CY; ژانگ، Q. شباهت، تفاوت و همبستگی شاخصهای خشکسالی هواشناسی و هیدرولوژیکی در یک منطقه آب و هوای مرطوب – حوضه آبریز دریاچه پویانگ در چین. هیدرول. Res. 2016 ، 47 ، 1211-1223. [ Google Scholar ] [ CrossRef ]
- شانکمن، دی. کیم، بی دی. آهنگ، جی. فرکانس سیل در منطقه دریاچه پویانگ چین: روندها و ارتباطات از راه دور. بین المللی جی.کلیماتول. یک شهاب سنگ JR. Soc. 2006 ، 26 ، 1255-1266. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- برنهام، جی. بارزن، ج. Pidgeon، AM; سان، بی. وو، جی. لیو، جی. جیانگ، اچ. جستوجوی جدید توسط جرثقیلهای سیبری زمستانگذران Leucogeranus leucogeranus در دریاچه پویانگ چین نشاندهنده تغییرات گستردهتر در اکوسیستم است و چالشهای جدیدی را برای گونهای در معرض خطر انقراض بهوجود میآورد. محافظ پرندگان بین المللی 2017 ، 27 ، 204-223. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- می، ایکس. دای، ز. فاغرازی، س. چن، جی. تغییرات چشمگیر در منطقه تالاب نوظهور در بزرگترین دریاچه آب شیرین چین، دریاچه پویانگ. Adv. منبع آب 2016 ، 96 ، 1-10. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- بله، X. ژانگ، کیو. بای، ال. Hu, Q. مطالعه مدلسازی تخلیه حوضه به دریاچه Poyang تحت آب و هوای آینده در چین. کوات. بین المللی 2011 ، 244 ، 221-229. [ Google Scholar ] [ CrossRef ]
- گائو، جی اچ. جیا، جی. کتنر، ای جی; زینگ، اف. وانگ، YP; Xu، XN; یانگ، ی. Zou، XQ; گائو، اس. چی، اس. و همکاران تغییرات در تبادل آب و رسوب بین رودخانه چانگجیانگ و دریاچه پویانگ در شرایط طبیعی و انسانی، چین. علمی کل محیط. 2014 ، 481 ، 542-553. [ Google Scholar ] [ CrossRef ] [ PubMed ]
- لی، ی. یائو، جی. ژائو، جی. ژانگ، Q. شواهدی از روابط هیدرولیکی بین آب های زیرزمینی و آب دریاچه در سراسر تالاب دشت سیلابی بزرگ دریاچه پویانگ، چین. علم آب. تکنولوژی تامین آب 2018 ، 18 ، 698–712. [ Google Scholar ] [ CrossRef ]
- پاتل، NN; آنجیولی، ای. گامبا، پی. گاگان، ا. لیسینی، جی. استیونز، FR; تاتم، ای جی. Trianni، G. سکونتگاه چند زمانی و نقشه برداری جمعیت از Landsat با استفاده از موتور Google Earth. بین المللی J. Appl. زمین Obs. Geoinf. 2015 ، 35 ، 199-208. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- شلستوف، آ. لاورنیوک، ام. کوسول، ن. نوویکوف، آ. Skakun، S. کاوش پلت فرم موتور Google Earth برای پردازش داده های بزرگ: طبقه بندی تصاویر ماهواره ای چند زمانی برای نقشه برداری محصول. جلو. علوم زمین 2017 ، 5 ، 17. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- چن، اف. ژانگ، ام. تیان، بی. Li، Z. استخراج خطوط دریاچه یخبندان در فلات تبت با استفاده از تصاویر Landsat 8 و موتور Google Earth. IEEE J. Sel. بالا. Appl. زمین Obs. Remote Sens. 2017 , 10 , 4002–4009. [ Google Scholar ] [ CrossRef ]
- هیرد، JN; دلانسی، ER; مک درمید، جی. Kariyeva، J. Google Earth Engine، داده های ماهواره ای با دسترسی باز، و یادگیری ماشینی در حمایت از نقشه برداری احتمالی تالاب بزرگ. Remote Sens. 2017 ، 9 ، 1315. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- تورس، آر. اسنوئیج، پ. گئودتنر، دی. بیبی، دی. دیویدسون، ام. آتما، ای. پوتین، پ. رومن، بی. فلوری، ن. براون، م. و همکاران ماموریت GMES Sentinel-1. سنسور از راه دور محیط. 2012 ، 120 ، 9-24. [ Google Scholar ] [ CrossRef ]
- فام دوک، بی. پریجنت، سی. آیرس، F. نظارت بر آب سطحی در کامبوج و دلتای مکونگ ویتنامی در طول یک سال، با مشاهدات Sentinel-1 SAR. Water 2017 , 9 , 366. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- بورا، اس بی؛ سیواسنکار، ت. رامیا، م. راجو، پی. نقشه برداری و نظارت بر طغیان سیل در پارک ملی کازیرانگا، آسام با استفاده از داده های Sentinel-1 SAR. محیط زیست نظارت کنید. ارزیابی کنید. 2018 ، 190 ، 520. [ Google Scholar ] [ CrossRef ]
- داستان، م. Congalton، RG ارزیابی دقت: دیدگاه کاربر. فتوگرام مهندس Remote Sens. 1986 , 52 , 397-399. [ Google Scholar ]
- Foody، GM وضعیت ارزیابی صحت طبقه بندی پوشش زمین. سنسور از راه دور محیط. 2002 ، 80 ، 185-201. [ Google Scholar ] [ CrossRef ]
- دوست خوب، من. بنژیو، ی. کورویل، آ. یادگیری عمیق . انتشارات MIT: کمبریج، MA، ایالات متحده آمریکا، 2016. [ Google Scholar ]
- دورویه، ال. گیورفی، ال. لوگوسی، جی. نظریه احتمالی تشخیص الگو . Springer Science & Business Media: برلین، آلمان، 2013. جلد 31. [ Google Scholar ]
- الحاج، م. بغدادی، ن. بزی، ح. Zribi، M. تجزیه و تحلیل نفوذ سیگنال های SAR در باندهای C و L برای گندم، ذرت، و علفزار. Remote Sens. 2019 ، 11 ، 31. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- فریدمن، جی. هستی، تی. تبشیرانی، ر . عناصر یادگیری آماری ; Springer Series in Statistics: New York, NY, USA, 2001; جلد 1. [ Google Scholar ]
- وانگ، ی. ما، جی. شیائو، ایکس. وانگ، ایکس. دای، اس. ژائو، بی. پویایی بلندمدت آب سطحی دریاچه پویانگ: کار نقشه برداری بر اساس پلتفرم ابر موتور Google Earth. Remote Sens. 2019 , 11 , 313. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- ژانگ، ز. چن، ایکس. Xu، CY; هونگ، ی. هاردی، جی. Sun، Z. بررسی تأثیر تعامل رودخانه-دریاچه بر خشکسالی و منابع آب در حوضه دریاچه پویانگ. جی هیدرول. 2015 ، 522 ، 510-521. [ Google Scholar ] [ CrossRef ]
- ژانگ، جی. Hu, J. تقسیم بندی تصویر بر اساس روش 2 بعدی Otsu با تجزیه و تحلیل هیستوگرام. در مجموعه مقالات کنفرانس بین المللی 2008 در علوم کامپیوتر و مهندسی نرم افزار، هوبی، چین، 12-14 دسامبر 2008. جلد 6، ص 105-108. [ Google Scholar ]


بدون دیدگاه