

چکیده
سیستمهای هشدار زودهنگام منطقهای برای زمین لغزشها بر دادههای تاریخی برای پیشبینی رویدادهای آینده و تأیید و بهبود هشدارها تکیه میکنند. با این حال، پایگاههای اطلاعاتی رویدادهای زمین لغزش اغلب از نظر مکانی به سمت جادهها یا زیرساختهای دیگر تعصب دارند و تعداد کمی در مناطق دورافتاده گزارش شدهاند. در این مطالعه، ما نشان میدهیم که چگونه میتوان از Google Earth Engine برای ایجاد ترکیبهای تصویری تشخیص تغییرات چند زمانی با تصاویر ماهوارهای Sentinel-1 و -2 بهمنظور بهبود دید لغزش و تسهیل تشخیص زمین لغزش استفاده کرد. ابتدا، تصاویر چندطیفی Sentinel-2 برای نقشهبرداری زمین لغزشهای ناشی از طوفان باران تابستانی در Jølster (نروژ)، بر اساس تغییرات در شاخص تفاوت نرمال شده گیاهی (NDVI) بین تصاویر قبل و بعد از رویداد استفاده شد. سپس تصاویر چند زمانی قبل و بعد از رویداد با کاهش همه تصاویر موجود در یک ماه قبل و بعد از رخداد زمین لغزش ایجاد شد که از آن ترکیبات تصویر تشخیص تغییر نهایی تولید شد. ما از میانگین شدت پس پراکندگی در co- (VV) و قطبش متقاطع (VH) برای دادههای رادار دهانه مصنوعی Sentinel-1 (SAR) و حداکثر NDVI برای Sentinel-2 استفاده کردیم. نقشه برداری مبتنی بر NDVI تعداد رویدادهای ثبت شده را از 14 به 120 افزایش داد، در حالی که سوگیری فضایی کاهش یافت، از 100٪ رویدادهای واقع در 500 متری یک جاده به 30٪ نزدیک به جاده ها در موجودی جدید. از 120 زمین لغزش، 43٪ نیز در ترکیب تصویر SAR چند زمانی در قطبش VV قابل تشخیص بودند، در حالی که فقط لغزش های رو به شرق در VH به وضوح قابل مشاهده بودند. سر و صدا، از ابرها و کشاورزی در Sentinel-2، و لک در Sentinel-1، با استفاده از رویکردهای ترکیبی چند زمانی کاهش یافت و دید زمین لغزش را بدون به خطر انداختن وضوح فضایی بهبود بخشید. نتایج ما نشان میدهد که تشخیص زمین لغزش به صورت دستی یا خودکار میتواند با استفاده از تصاویر مرکب زمینلغزش در دسترس با استفاده از تصاویر رصد زمین و موتور Google Earth، با پتانسیل بالقوه برای بهبود سوگیری فضایی در فهرستهای زمین لغزش، بهطور قابلتوجهی با ترکیبهای تصویر چندزمانی بهبود یابد. با استفاده از کامپوزیتهای تصویر ماهوارهای چند زمانی، ما پیشرفتهای قابلتوجهی در دید زمین لغزش در Jølster، در مقایسه با روشهای مرسوم تشخیص تغییر دو زمانی مشاهده کردیم، و این را برای اولین بار با استفاده از دادههای SAR قطبی شده VV به کار بردیم. اسکریپتهای GEE اجازه میدهند که این روش به سرعت در مناطق جدید تکرار شود، که میتواند برای کاهش سوگیری فضایی در پایگاههای اطلاعاتی زمین لغزش مفید باشد. بهبود دید زمین لغزش بدون به خطر انداختن وضوح مکانی. نتایج ما نشان میدهد که تشخیص زمین لغزش به صورت دستی یا خودکار میتواند با استفاده از تصاویر مرکب زمینلغزش در دسترس با استفاده از تصاویر رصد زمین و موتور Google Earth، با پتانسیل بالقوه برای بهبود سوگیری فضایی در فهرستهای زمین لغزش، بهطور قابلتوجهی با ترکیبهای تصویر چندزمانی بهبود یابد. با استفاده از کامپوزیتهای تصویر ماهوارهای چند زمانی، ما پیشرفتهای قابلتوجهی در دید زمین لغزش در Jølster، در مقایسه با روشهای مرسوم تشخیص تغییر دو زمانی مشاهده کردیم، و این را برای اولین بار با استفاده از دادههای SAR قطبی شده VV به کار بردیم. اسکریپتهای GEE اجازه میدهند که این روش به سرعت در مناطق جدید تکرار شود، که میتواند برای کاهش سوگیری فضایی در پایگاههای اطلاعاتی زمین لغزش مفید باشد. بهبود دید زمین لغزش بدون به خطر انداختن وضوح مکانی. نتایج ما نشان میدهد که تشخیص زمین لغزش به صورت دستی یا خودکار میتواند با استفاده از تصاویر مرکب زمینلغزش در دسترس با استفاده از تصاویر رصد زمین و موتور Google Earth، با پتانسیل بالقوه برای بهبود سوگیری فضایی در فهرستهای زمین لغزش، بهطور قابلتوجهی با ترکیبهای تصویر چندزمانی بهبود یابد. با استفاده از کامپوزیتهای تصویر ماهوارهای چند زمانی، ما پیشرفتهای قابلتوجهی در دید زمین لغزش در Jølster، در مقایسه با روشهای مرسوم تشخیص تغییر دو زمانی مشاهده کردیم، و این را برای اولین بار با استفاده از دادههای SAR قطبی شده VV به کار بردیم. اسکریپتهای GEE اجازه میدهند که این روش به سرعت در مناطق جدید تکرار شود، که میتواند برای کاهش سوگیری فضایی در پایگاههای اطلاعاتی زمین لغزش مفید باشد. نتایج ما نشان میدهد که تشخیص زمین لغزش به صورت دستی یا خودکار میتواند با استفاده از تصاویر مرکب زمینلغزش در دسترس با استفاده از تصاویر رصد زمین و موتور Google Earth، با پتانسیل بالقوه برای بهبود سوگیری فضایی در فهرستهای زمین لغزش، بهطور قابلتوجهی با ترکیبهای تصویر چندزمانی بهبود یابد. با استفاده از کامپوزیتهای تصویر ماهوارهای چند زمانی، ما پیشرفتهای قابلتوجهی در دید زمین لغزش در Jølster، در مقایسه با روشهای مرسوم تشخیص تغییر دو زمانی مشاهده کردیم، و این را برای اولین بار با استفاده از دادههای SAR قطبی شده VV به کار بردیم. اسکریپتهای GEE اجازه میدهند که این روش به سرعت در مناطق جدید تکرار شود، که میتواند برای کاهش سوگیری فضایی در پایگاههای اطلاعاتی زمین لغزش مفید باشد. نتایج ما نشان میدهد که تشخیص زمین لغزش به صورت دستی یا خودکار میتواند با استفاده از تصاویر مرکب زمینلغزش در دسترس با استفاده از تصاویر رصد زمین و موتور Google Earth، با پتانسیل بالقوه برای بهبود سوگیری فضایی در فهرستهای زمین لغزش، بهطور قابلتوجهی با ترکیبهای تصویر چندزمانی بهبود یابد. با استفاده از کامپوزیتهای تصویر ماهوارهای چند زمانی، ما پیشرفتهای قابلتوجهی در دید زمین لغزش در Jølster، در مقایسه با روشهای مرسوم تشخیص تغییر دو زمانی مشاهده کردیم، و این را برای اولین بار با استفاده از دادههای SAR قطبی شده VV به کار بردیم. اسکریپتهای GEE اجازه میدهند که این روش به سرعت در مناطق جدید تکرار شود، که میتواند برای کاهش سوگیری فضایی در پایگاههای اطلاعاتی زمین لغزش مفید باشد. ما پیشرفتهای قابلتوجهی را در دید زمین لغزش در جولستر، در مقایسه با روشهای متداول تشخیص تغییر دو زمانی مشاهده کردیم، و این را برای اولین بار با استفاده از دادههای SAR قطبی شده VV به کار بردیم. اسکریپتهای GEE اجازه میدهند که این روش به سرعت در مناطق جدید تکرار شود، که میتواند برای کاهش سوگیری فضایی در پایگاههای اطلاعاتی زمین لغزش مفید باشد. ما پیشرفتهای قابلتوجهی را در دید زمین لغزش در جولستر، در مقایسه با روشهای متداول تشخیص تغییر دو زمانی مشاهده کردیم، و این را برای اولین بار با استفاده از دادههای SAR قطبی شده VV به کار بردیم. اسکریپتهای GEE اجازه میدهند که این روش به سرعت در مناطق جدید تکرار شود، که میتواند برای کاهش سوگیری فضایی در پایگاههای اطلاعاتی زمین لغزش مفید باشد.
کلید واژه ها:
ترکیب تصویر چند زمانی ; تشخیص تغییر ؛ جولستر ; پایگاه داده زمین لغزش ; Sentinel-2 ; Sentinel-1 ; موتور گوگل ارث ؛ NDVI ; منظره یخبندان
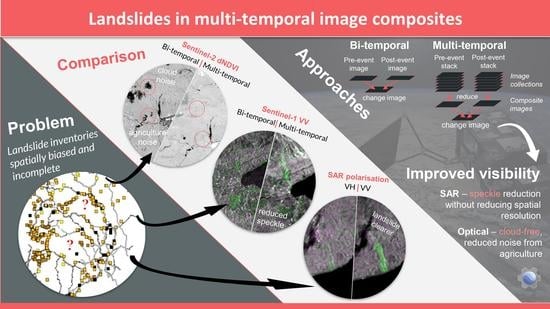
چکیده گرافیکی
1. مقدمه
انتظار میرود که فراوانی و شدت رویدادهای شدید بارش در نتیجه تغییرات آب و هوایی افزایش یابد [ 1 ، 2 ]. به نوبه خود، بلایای ناشی از بارش، از جمله رانش زمین و سیل، نیز در حال افزایش است [ 3 ]. هدف سیستمهای هشدار زودهنگام زمین لغزش (LEWS) کاهش تلفات جانی و آسیبها، با دادن هشدارهای پیشرفته به مردم است تا امدادگران اضطراری منابع را آماده کرده و به مردم هشدار دهند که از مناطق پرخطر اجتناب کنند [ 4 ]. LEWS های موجود برای بهبود درک فرآیندهای ایجاد زمین لغزش، توسعه آستانه های هشدار و مدل های پیش بینی، و در نهایت تأیید هشدارهای صادر شده و ارزیابی عملکرد، به دانش رویدادهای گذشته متکی هستند [ 5 ]]. دادههای موجودی زمین لغزش نیز برای تهیه نقشههای حساسیت زمین لغزش و خطر مورد استفاده برای برنامهریزی فضایی مورد نیاز است، و پاسخدهندگان اضطراری برای ارزیابی خسارات و نجات جان افراد به اطلاعات دقیق نیاز دارند [ 6 ].
با این حال، برای اپراتورهای LEWS، جمع آوری داده های زمین لغزش و تأیید هشدارها یک کار دشوار و خسته کننده است [ 7 ]. به طور کلی، ثبت رویدادها و تهیه فهرست زمین لغزش به طور سیستماتیک انجام نمی شود [ 8 ]. در حال حاضر، دادههای رویداد تک لغزش عمدتاً از مشاهدات زمینی، از جمله گزارشهای مقامات راهآهن و راهآهن، و تا حدی کمتر از مردم، یا از رسانههای اجتماعی و گزارشهای خبری استخراج میشوند [ 9 ، 10 ]. برای ایجاد رویدادها (مثلاً بارش شدید یا زلزله) با لغزش های متعدد حاصل، نقشه برداری با استفاده از تصاویر نوری هوایی یا ماهواره ای ممکن است به صورت موردی، بسته به انگیزه و منابع انجام شود [ 11 ], 12 , 13 ]. چنین نقشهبرداری معمولاً به مناطقی محدود میشود که قبلاً شناخته شدهاند که تحت تأثیر زمین لغزش قرار گرفتهاند (به عنوان مثال، [ 14 ، 15 ، 16 ])، یا برای تأیید مکان دقیق زمین لغزشهایی که ممکن است بدون مختصات دقیق گزارش شده باشند، برای مثال، در گزارش های رسانه ای [ 17 ]. نقشه برداری سیستماتیک به طور کلی هنوز در مناطق وسیع یا برای شناسایی زمین لغزش های ناشناخته قبلی در مناطق دور افتاده انجام نشده است.
با این حال، پایگاههای اطلاعاتی لغزشهای حاصل، تمایل دارند تا خوشههایی از مشاهدات را در اطراف زیرساختهای خطی و مناطق پرجمعیت نشان دهند، بنابراین نمایشی واقعی از توزیع مکانی واقعی زمین لغزشها، همانطور که در شکل 1 مشاهده میشود، ارائه نمیدهند . علاوه بر این، موجودی زمین لغزش معمولاً ناقص است. به عنوان مثال، در اروپا، مقایسه بین تراکم زمین لغزش بر اساس سوابق زمین لغزش از سازمان زمینشناسی اروپا و نقشه حساسیت زمین لغزش اروپا (ELSUS 1000 v1) نشان میدهد که تنها سه کشور (لهستان، ایتالیا و اسلواکی) موجودی در نظر گرفته شدهاند. بیش از 50٪ کامل شده است [ 18 ]. این مسائل مربوط به سوگیری فضایی و داده های از دست رفته، نحوه استفاده از داده های زمین لغزش را برای مدل های پیش بینی محدود می کند [ 19 ]].
استفاده از تصاویر رصد زمین (تصاویر EO) برای تشخیص رویدادهای زمین لغزش منفرد ناشناخته شبیه یافتن سوزن در انبار کاه است. از این رو، چنین بررسیهایی به دلیل یک رویداد محرک خاص، بر روی نقشهبرداری زمین لغزشها در مناطقی متمرکز میشوند که دارای لغزشهای متعدد هستند [ 20 ]. با این حال، پیشرفتهای مداوم و سریع در زمینههای بینایی کامپیوتر و محاسبات ابری، و همچنین در کیفیت، محدوده و در دسترس بودن تصاویر EO، به این معنی است که نظارت مداوم و خودکار زمین لغزش ممکن است به زودی امکانپذیر شود. امروزه، مدلهای یادگیری عمیق، ماشینها را قادر میسازد تا وظایف تشخیص تصویر را که چند سال پیش ممکن نبود، انجام دهند. چنین سیستمی برای نظارت بر تغییرات در جنگلها و پوشش زمین در حال توسعه است (به عنوان مثال، جنگل جهانی [ 21]، و تشخیص و طبقه بندی تغییر مداوم (CCDC) پوشش زمین [ 22 ]). اینها در مقیاس جهانی با استفاده از تصاویر Landsat با وضوح 30 متر و قدرت پردازش Google Earth Engine (GEE) عمل می کنند. مدلهای آموزشدیده جهانی (همچنین به عنوان تعمیمیافته) برای تشخیص زمین لغزش از تصاویر EO اخیراً ظاهر شدهاند [ 23 ، 24 ]، بر اساس نتایج مدلهای آموزشدیده محلی (به عنوان مثال، [ 25 ، 26 ]). اینها هنوز قادر به عملکرد بهتر از انسان در وظایف تشخیص زمین لغزش یا نقشه برداری نیستند، و آزمایشات اولیه نشان داده است که آنها در یک چشم انداز یخبندان عملکرد خوبی نداشتند [ 27 ]. به استثنای دو رانش زمین که در فیوردلند، نیوزلند رخ داده است [ 24]، مدلهای آموزشدیده جهانی برای تشخیص زمین لغزش که در بالا ذکر شد، در بیشتر موارد شامل رویدادهایی از مناظر آبدرهها نبودهاند. بر اساس پیشرفتهایی که در سایر وظایف تشخیص تصویر صورت گرفته است، با دادههای آموزشی اضافی و توسعه، به نظر میرسد پتانسیل خوبی برای رایانهها وجود دارد که در آینده نزدیک از انسانها در این وظایف پیشی بگیرند.
در حالی که تحقیقات بر روی تنظیم دقیق معماریها و طبقهبندیکنندههای مدل یادگیری ماشین ادامه دارد، گزینههای دیگری برای بهبود قابلیت تشخیص زمین لغزش با استفاده از دادههای EO بلافاصله در دسترس هستند. Google Earth Engine (GEE) یک پلتفرم مبتنی بر ابر است که برای سادهسازی تحلیلهای مکانی با بهبود فرآیند دسترسی و پردازش دادهها طراحی شده است. با یک حساب محقق رایگان، GEE دسترسی فوری به 37 سال تصاویر ماهوارهای، با مجموعهای از مجموعه دادههای جغرافیایی در دسترس عموم، از جمله مجموعههای تصاویر نوری (مانند MODIS، Landsat، و Sentinel-2)، دادههای رادار دیافراگم مصنوعی (SAR) را فراهم میکند. از Sentinel-1، طبقه بندی پوشش زمین، و داده های بارش، به نام چند. تجزیه و تحلیل مناطق بزرگ در حالی که تشخیص تغییرات در طول زمان می تواند بسیار کارآمد با استفاده از زیرساخت ابری گوگل انجام شود [28 ].
چندین محقق شروع به استفاده از GEE برای بهبود تشخیص زمین لغزش کردهاند. HazMapper یک برنامه GEE است که برای تسهیل نقشه برداری رویدادهای مخاطره طبیعی طراحی شده است [ 29 ]. برای زمین لغزشها، تصاویری که تفاوت نسبی در شاخص گیاهی تفاوت نرمال شده (rdNDVI) محاسبه شده از کامپوزیتهای بدون ابر با استفاده از تصاویر Sentinel-2 یا Landsat را نشان میدهند، میتوانند برای نقشهبرداری زمین لغزشها برای یک رویداد مورد علاقه (مانند زلزله یا رویداد بارش شدید) استفاده شوند. ) [ 29 ]. داده های SAR همچنین می توانند برای تشخیص زمین لغزش استفاده شوند [ 30]. داده های SAR نسبت به تصاویر نوری برای تشخیص سریع زمین لغزش مزیت دارند، زیرا این حسگر در ابر نفوذ می کند و سطح زمین را مستقل از شرایط نوری اندازه گیری می کند. با این حال، به دلیل سطح تخصص مورد نیاز برای پیش پردازش داده های SAR [ 31 ] و به طور کلی دید کمتر زمین لغزش ها، کمتر مورد استفاده قرار می گیرد. GEE درها را برای اکتشاف گستردهتر دادههای SAR باز میکند، زیرا مجموعه تصاویر Sentinel-1 GRD قبلاً بسیاری از پیشپردازشها را انجام داده است [ 32 ]. روشی برای تشخیص زمین لغزش با استفاده از دادههای SAR در GEE توسط [ 31 ] با استفاده از دادههای Sentinel-1 قطبی شده با VH برای تشخیص تغییرات در پراکندگی پسانداز راداری که میتواند با لغزشها مرتبط باشد، پیشنهاد شده است.
یکی از جنبههای مشترک هر دو این روشها، استفاده از پشتههای تصویری چند زمانی از رویدادهای قبل و بعد از رویدادها است که برای ایجاد تصاویر تفاوت استفاده میشوند، که از آن لغزشها را میتوان شناسایی کرد ( شکل 2 ). خارج از GEE، چنین تحلیلی عموماً نیازمند دانلود، ذخیره و پردازش محلی مقادیر زیادی از داده است که به راحتی می تواند از ظرفیت ذخیره سازی یک رایانه شخصی فراتر رود (به عنوان مثال، [ 33 ]). از این رو، اکثر روشهای تشخیص تغییر برای تشخیص زمین لغزش از یک مجموعه واحد از تصاویر قبل و بعد از رویداد برای ایجاد یک تصویر متفاوت استفاده میکنند [ 34 ]]. مزیت تصاویر چند زمانی برای تشخیص تغییرات این است که در مقایسه با تصاویر دو زمانه، نویز را کاهش میدهند، بنابراین امکان تجسم واضحتر تغییرات روی سطح زمین را فراهم میکنند. برای تصاویر نوری، روش سبزترین پیکسل این کار را با انتخاب حداکثر مقدار پیکسل NDVI در پشته انجام می دهد تا یک تصویر مجموع تولید کند. این به طور موثر پیکسل های ابری را حذف می کند و سیگنال های NDVI به طور موقت کاهش یافته از فعالیت های کشاورزی را صاف می کند. در مقایسه، برای تصاویر SAR، نویز لکهای با تجمع در پشتههای چند زمانی کاهش مییابد. این بدون از دست دادن وضوح مکانی به دست میآید، همانطور که در روش رایجتر فیلتر کردن لکهها در پیکسلهای همسایه فضایی از یک تصویر تاریخ واحد رخ میدهد [ 35 ].
هدف اصلی این مطالعه بررسی چگونگی استفاده از رویکردهای ترکیبی تصویر چند زمانی برای بهبود دید زمین لغزش در تصاویر تشخیص تغییر و در نتیجه بهبود سوگیری فضایی و کامل بودن پایگاههای اطلاعاتی زمین لغزش بود. به عنوان بخشی از این مطالعه، فهرستی از زمین لغزش برای Jølster از تصاویر Sentinel-2 ایجاد شد، سپس با کار میدانی، تصاویر هواپیماهای بدون سرنشین و مشاهدات هلیکوپتر تأیید شد. سپس، ما تفاوت در دید لغزش بین روشهای تشخیص تغییر دو و چند زمانی را با تصاویر Sentinel-1 با دادههای قطبش VV و VH و با NDVI در تصاویر Sentinel-2 بررسی کردیم. همچنین با توجه به نقش پوشش گیاهی محلی، هدف ما بهبود دانش در مورد نحوه عملکرد این رویکردها در یک چشمانداز یخبندان بود.
سوالات اصلی درگیر به شرح زیر است:
-
تا چه حد می توان سوگیری فضایی در NLDB را با استفاده از تصاویر EO و رویکردهای تشخیص تغییر برای شناسایی زمین لغزش ها بهبود بخشید؟
-
چگونه میتوان روشهای تشخیص تغییر چندزمانی و ترکیبی تصویر با استفاده از GEE، دید زمین لغزش را در مقایسه با رویکردهای تشخیص تغییر دو زمانی بهبود بخشد؟
-
لغزش ها در کدام نوع داده ها (S2-NDVI، S1-VV، S1-VH) بیشتر قابل مشاهده هستند؟
این مطالعه بر عملکرد رویکردهای دستی متمرکز بود. نتایج آزمایشهای مدلهای تشخیص زمین لغزش آموزش دیده برای مطالعه موردی Jølster در یک مقاله جداگانه ارائه خواهد شد [ 27 ]. اصطلاح زمین لغزش به طور کلی در سراسر جهان به کار می رود، برای اشاره به لغزش سریع که در خاک رخ می دهد، به عنوان مثال، جریان زباله و بهمن. با این حال، تکنیکهای مورد بحث به طور بالقوه میتوانند برای زمین لغزشهای عمیقتر که به دلیل شکست سنگ بستر رخ میدهند نیز استفاده شوند، تا زمانی که پوشش گیاهی سطحی حذف شود. جزئیات در مورد محرک ها، طبقه بندی زمین لغزش و مکانیسم های شکست در Jølster در [ 36 ] موجود است.
2. مطالعه موردی: رویداد طوفان باران جولستر در 30 ژوئیه 2019، نروژ غربی
در 30 ژوئیه 2019، شهر Vassenden، در غرب دریاچه Jølster، در غرب نروژ، توسط یک طوفان شدید باران تابستانی ضربه خورد. حداکثر بارندگی ثبت شده این رویداد 113 میلی متر در 24 ساعت بود که از بزرگی رویداد 200 ساله در دو نزدیکترین ایستگاه هواشناسی بارشی، Botnen و Haukedalen [ 37 ] بیشتر بود. این امر منجر به رانش زمین و سیل های متعدد شد که باعث اثرات شدید بر زیرساخت ها، آسیب به اموال خصوصی و یک کشته شد ( شکل 3 و شکل 4 ). اکثر زمین لغزشها در شیبهای باز رخ داده و بهعنوان بهمنهای باقیمانده آغاز میشوند [ 36 ]. برخی از اینها به جریانهای زبالههای کانالیزه شده یا نیمه کانالیزه تبدیل شدند، از جمله زمین لغزش بزرگ در واسندن، که در شکل 3 نشان داده شده است.دی، ای.
بیش از 150 نفر از منطقه تخلیه شدند و بزرگراه E39 – مسیر اصلی حمل و نقل بین شهر پایتخت اسلو و شهر برگن – در شش نقطه به دلیل سیل و آوار بسته شد. کار برای حذف آوار و ایمن سازی منطقه پس از این رویداد 17 میلیون کرون (حدود 1.65 میلیون یورو) هزینه داشت [ 38 ].
منطقه مورد مطالعه که در شکل 5 نشان داده شده است 22 کیلومتر غرب تا شرق از Førde تا Årnes و 18 کیلومتر شمال شرقی امتداد دارد. این چشم انداز متشکل از دره های یخچالی شیب دار، دریاچه ها و کوه های بیش از 1500 متر مربع است. از نظر ژئومورفولوژیکی، منطقه مورد مطالعه به شدت توسط تاریخ یخبندان منطقه تغییر یافته است. رشته کوه اسکندز از انواع سنگ بستر بسیار متفاوت تشکیل شده است، اما در همه مناطق در معرض فرسایش فیزیکی سخت مکرر توسط صفحات یخی قرار گرفته است و تقریباً تمام رسوبات (از جمله باقیمانده های هوازدگی) را از سنگ بستر جدا می کند. در آخرین حداکثر یخبندان، صفحات یخی به بیش از 1800 متر ارتفاع رسید [ 39]. این منطقه احتمالاً در حدود 12-11 ka [ 40 ] یخ زدایی شده است، با بسیاری از مورن های منطقه در این دوره تشکیل شده است، اگرچه ممکن است مدتی پس از آن یک صفحه یخ باقی مانده در دره وجود داشته باشد.
چشم انداز شامل دره های U شکل با سطوح سنگ بستر صاف، زاویه دار و صیقلی است که برای تشکیل صفحات لغزنده مطلوب است. نشانههای دیگر فرسایش خطی و یخبندان قوی در سنگهای شایسته در این منطقه قابل مشاهده است، از جمله ویژگیهای roche moutonnée، crag و دم. این نوع از ویژگی های سنگ بستر در نیمه بالایی چشم انداز جولستر نمایان می شود. چند گسل ترد در مقیاس کوچک باقی مانده در چشم انداز قابل مشاهده است [ 41 ]. بیشتر منطقه مورد مطالعه دارای پوشش سطحی از رسوبات مورین یخچالی است [ 42]. مورن اغلب در شیب های پوشاننده سنگ بستر به شدت تثبیت می شود. در ارتفاعات بالا در کوه ها، حفره های کوچک مورین را می توان در فرورفتگی های سنگ بستر برهنه در معرض دید قرار داد. روکش سست کولوویوم به سمت پایین شیب در طرفین دره گسترش می یابد و تا چند متر ضخامت در کف دره افزایش می یابد.
لایههای هوموس مدفون شواهدی از لغزشهای قبلی را نشان میدهند که در چینهشناسی که توسط جریان زباله در Slåtten در معرض دید قرار گرفتهاند ( شکل 3 B) دیده میشود. حداقل 40 رویداد تاریخی زمین لغزش به عنوان نقطه در پایگاه داده ملی زمین لغزش نروژ (NLDB، در www.skredregistering.no ، دسترسی به 18 ژانویه 2022، از این رو به عنوان رویدادهای ثبت شده نامیده می شود ) در منطقه مورد مطالعه ثبت شده است، و چندین نمونه سنگ وجود دارد. سقوط. تاریخچه رویدادهای ثبت شده از 1625 تا 2019 است. اکثر رویدادهای ثبت شده در NLDB از مشاهدات در امتداد شبکه جاده ها مشتق شده اند.
آب و هوای مدرن منطقه مورد مطالعه معتدل است و به دلیل مجاورت با ساحل، زمستان های نسبتا معتدل و تابستان های مرطوب دارد. یخچال های طبیعی هنوز در منطقه فعال هستند، پارک ملی Jostedalsbreen در 30 کیلومتری شرق منطقه مورد مطالعه قرار دارد. پوشش گیاهی منطقه مورد مطالعه از خزه ها و درختچه های پراکنده یا جنگل های توس سبک در ارتفاعات تا جنگل های صنوبر و مزارع کشاورزی پایین تر در دره ها متغیر است. جاده ها و مناطق ساخته شده عمدتاً در دره های اصلی مسطح تر قرار دارند.
3. داده های مورد استفاده
دادههای ورودی اصلی تصاویر ماهوارهای از ماموریتهای Sentinel-1 و -2 آژانس فضایی اروپا (ESA) بود که با دانلود از مرکز دسترسی آزاد کوپرنیک (COAH، https://scihub.copernicus.eu/dhus/#/ ) به دست آمد. صفحه اصلی ، در 10 آگوست 2019 مشاهده شده است) یا مستقیماً در ویرایشگر کد GEE ( https://code.earthengine.google.com/ ، دسترسی به 10 اوت 2019) استفاده می شود. دادههای Sentinel-1 SAR دارای دو قطبی (VV و VH)، با باند C (5.405 گیگاهرتز) هستند و در صحنههای سطح 1 تکنگاهی پیچیده (SLC) یا صحنههای شناسایی با برد زمین (GRD) موجود هستند. ما از داده های به دست آمده در حالت اکتساب تداخل سنجی گسترده (IW) استفاده کردیم. همانطور که در جدول 1 نشان داده شده است، اصلاحات زمین با استفاده از یک مدل زمین دیجیتال با وضوح 10 متر (DTM) که از Høydedata دانلود شده است، اعمال شد.. برای Sentinel-2، ما از محصول سطح 2A، تصاویر بازتابی پایین اتمسفر (BOA) استفاده کردیم که از محصولات سطح 1C با استفاده از sen2cor پیش پردازش شده بودند. علاوه بر این، داده های تاریخی زمین لغزش از NLDB و داده های جاده در تجزیه و تحلیل سوگیری فضایی، با جزئیات منبع نشان داده شده در جدول 1 استفاده شد.
4. روش ها
این بخش رویکردهای مورد استفاده برای تولید تصاویر تشخیص تغییر برای مطالعه موردی Jølster را توصیف میکند، که از آن لغزشهای جدید به صورت دستی نقشهبرداری یا شناسایی شدند. این موارد در جدول 2 خلاصه شده است. به طور کلی، اینها بر اساس ویژگی های زیر تقسیم می شوند:
-
تکنیک: دو زمانی یا چند زمانی ( شکل 2 )؛
-
داده های ورودی: مقادیر شدت پراکندگی برگشتی Sentinel-1 SAR با استفاده از داده های متقاطع (VH) یا هم قطبی (VV) یا داده های نوری Sentinel-2 با استفاده از مقادیر NDVI.
رویکردهای دو زمانی به تصاویر تشخیص تغییر که با تفریق یک تصویر پیش رویدادی منفرد از یک تصویر منفرد پس از رویداد تولید میشوند، اشاره دارد. در مقابل، روشهای چند زمانی به تصاویر تشخیص تغییر تولید شده در Google Earth Engine، با استفاده از یک ماه از تصاویر قبل و بعد از رویدادها، ترکیب شده در یک مجموعه واحد از تصاویر قبل و بعد از رویداد، قبل از محاسبه تفاوت اشاره میکنند. .
به منظور جلوگیری از ایجاد نویز ناشی از اثرات فصلی که در ماه سپتامبر رخ می دهد، از یک دوره زمانی نسبتاً کوتاه برای فیلتر کردن تصاویر استفاده کردیم. یک ماه از تصاویر برای مطالعه موردی ما به دلایل زیر مناسب تلقی شد:
-
فرکانس نسبتاً بالایی از اکتساب تصویر در یک موقعیت جغرافیایی شمالی وجود دارد.
-
تصاویر نوری در این دوره همه پوشیده از ابر نبودند.
-
با آمدن پاییز، شرایط به طور قابل توجهی بین ماه اوت و سپتامبر در منطقه مورد مطالعه تغییر کرد، از جمله سایه های بیشتر در دامنه های رو به شمال و کاهش پوشش گیاهی سبز در ارتفاعات.
برای تکرار این مطالعه در مکانهای دیگر، میتوان از یک دوره زمانی طولانیتر استفاده کرد، به عنوان مثال، زمانی که پوشش ابری مداوم یا فرکانس پایینتر گرفتن تصویر وجود دارد، تا زمانی که شرایط پوشش گیاهی و نور به طور قابلتوجهی تغییر نکند.
4.1. روش های تولید تصاویر تشخیص تغییر
4.1.1. تصویر Sentinel-2 bi-Temporal (S2-BT).
کاشیهای سطح 2A از نزدیکترین تاریخها قبل و بعد از 30 ژوئیه 2019، با پوشش ابری کمتر از 50 درصد، از COAH دانلود شدند. پنجره اکتساب بین کاشی های قبل و بعد از رویداد مورد استفاده برای نقشه dNDVI پنج روز (28 جولای و 2 آگوست) بود، با پوشش ابری به ترتیب 0.64٪ و 27.19٪. تصاویر تفاوت با استفاده از نرم افزار SNAP 7.0 به شرح زیر تولید شدند: ابتدا تصاویر قبل و بعد از رویداد با استفاده از یک زیر مجموعه فضایی به منطقه مورد نظر برش داده شدند. سپس این پیکسل های تصویر با استفاده از ابزار رستر collocation تراز شدند. در نهایت از ابزار ریاضی باند برای محاسبه dNDVI با استفاده از معادله زیر استفاده شد:
dNDVI =ب8RM– ب4آرب8آر+ ب4آر–ب8اس– ب4اسب8اس+ ب4اس
که در آن B8 باند مادون قرمز نزدیک، B4 نوار قرمز است، و زیر مجموعههای R و S مربوط به مرجع (پس از رویداد) و ثانویه (پیش رویداد) هستند. نتیجه یک شطرنجی با مقادیر -2 تا 2 است که در آن مقادیر منفی کاهش پوشش گیاهی را نشان می دهد. نتایج به صورت یک تصویر سیاه و سفید تک باندی نمایش داده می شود. برای اهداف نمایش، مقیاس رنگ در یک محدوده شامل 90٪ از مقادیر [-0.6، 0.1] کشیده شد.
4.1.2. تصویر چند زمانی Sentinel-2 (S2-MT).
در GEE، ابتدا مجموعههای جداگانه تصویر قبل و بعد از رویداد با فیلتر کردن کل مجموعه Sentinel-2 level 2A، بر اساس مکان و تاریخ، تولید شدند. باندهای NDVI بعدی به تمام تصاویر موجود در مجموعه فیلتر شده اضافه شدند. سپس، تصاویر ترکیبی قبل و بعد از رویداد «سبزترین پیکسل» با در نظر گرفتن حداکثر مقدار NDVI برای هر پیکسل، در مجموعه تصویر، با استفاده از تابع موزاییک کیفیت ایجاد شد. در نهایت، یک تصویر تفاوت (dNDVI) با کم کردن کامپوزیت قبل از رویداد از ترکیب پس از رویداد تولید شد.
4.1.3. Sentinel-1 bi-Temporal (S1-BT)
صحنه های قبل و بعد از رویداد از COAH دانلود شد. صحنه های انتخاب شده در حالت تداخل سنجی گسترده (IW)، با قالب سطح 1 تک نگاه پیچیده (SLC)، قطبش دوگانه (VV و VH)، و از مسیرهای صعودی به دست آمد. صحنه قبل از رویداد مربوط به 25 جولای 2019 بود، یعنی پنج روز قبل از رویداد، در حالی که صحنه های پس از رویداد به ترتیب از 31 ژوئیه، 6 آگوست و 12 آگوست، یعنی 1، 7 و 13 روز پس از رویداد بود. شروع رویداد (به جدول 1 مراجعه کنیدبرای شناسه صحنه). سه تصویر ترکیبی با تصاویر مختلف پس از رویداد با استفاده از مراحل ذکر شده در زیر تولید شد. محصولات SLC دانلود شده در هندسه برد مایل و قبل از تجزیه و تحلیل بیشتر کدگذاری شده بودند. مراحل پیش پردازش شامل اصلاح بردار حالت مدار و حذف نویز اتمسفر بود. سپس، صحنهها برای سرکوب نویز لکهای چندشاخه و با استفاده از مدل زمین دیجیتال با وضوح ۱۰ متر (DTM) کدگذاری شدند. تصاویر نهایی، تصاویر پراکنده رادار، با وضوح زمین فضایی تقریباً 10 متر × 10 متر، ذخیره شده در فرمت GeoTIFF بودند. به منظور تسهیل تفسیر بصری تصاویر، ما تشخیص تغییرات چند زمانی را با استفاده از کامپوزیت های رنگی غنی شده اعمال کردیم، که تغییرات در پس پراکندگی را به عنوان کامپوزیت های قرمز-سبز-آبی (RGB) نشان می دهد، به دنبال رویکردی که برای تشخیص برف-بهمن توسعه یافته است.43 ، 44 ]. این ترکیبات RGB شامل صحنه قبل از رویداد در نوارهای قرمز و آبی و صحنه پس از رویداد (با فعالیت زمین لغزش) در باند سبز است: (R, G, B) = (pre, post, pre). در نهایت، کامپوزیت از محدوده دینامیکی کامل خود [-35، 10] دسیبل به [-25، 5] دسیبل کشیده شد تا دامنههای شدت غالب افزایش یابد. بهترین از سه تصویر ترکیبی برای تجزیه و تحلیل بیشتر انتخاب شد و دو تصویر باقی مانده دور انداخته شدند.
4.1.4. Sentinel-1 Multi-Temporal (S1-MT)
با استفاده از GEE، از صحنه های Sentinel-1 GRD استفاده شد. اینها به عنوان تصاویر از پیش پردازش شده در دسترس هستند، که در آنها مراحلی مانند کالیبراسیون و تصحیح عمودی قبلاً با استفاده از جعبه ابزار Sentinel-1 [ 32 ] انجام شده است. مجدداً، دو مجموعه تصویر جداگانه، یکی قبل از رویداد و دیگری پس از رویداد، با فیلتر کردن کل مجموعه Sentinel-1 بر اساس مکان، تاریخ، قطبش (VV و VH)، هندسه اکتساب ماهواره (میانگین صعود و نزول) ایجاد شد. تصاویر به طور جداگانه محاسبه شدند، سپس با استفاده از میانه) و حالت اکتساب (IW) در یک تصویر واحد ترکیب شدند. سپس، یک تابع تصحیح توپوگرافی [ 45 ] با استفاده از یک مدل زمین دیجیتال با وضوح 10 متر (DTM) که به عنوان دارایی GEE آپلود شد، برای همه تصاویر درون مجموعه ها اعمال شد (جزئیات).جدول 1 ). سپس، دو مجموعه تصویر به دو تصویر متوسط کاهش یافت. در نهایت، کامپوزیتهای RGB برای هر یک از قطبشهای VV و VH با تصویر قبل از رویداد در کانالهای قرمز و سبز و تصویر پس از رویداد در کانال آبی ایجاد شدند. برای تجسم، تصویر S1-MT با محدوده کششی [-21، 0.5]، با مقدار گاما 0.65 نمایش داده شد.
4.2. تحلیل رویکردهای مختلف
4.2.1. نقشه برداری اولیه زمین لغزش S2-BT و تجزیه و تحلیل سوگیری فضایی
نقشه برداری اولیه زمین لغزش با استفاده از روش معمولی S2-BT انجام شد. این کار در عرض یک هفته پس از وقوع زمین لغزش تکمیل شد و تقریباً سه ساعت طول کشید. چند ضلعیهایی که لغزشهای فرضی را تعیین میکنند، که معمولاً توسط خوشههای دراز تیره پیکسلها نشان داده میشوند، به صورت دستی در SNAP ترسیم شدند. در تجزیه و تحلیل سوگیری فضایی، مقایسه ای از حداقل فاصله بین زمین لغزش و جاده ها، بین فهرست زمین لغزش S2-BT، و لغزش های گزارش شده در پایگاه داده ملی، RegObs انجام شد. از مجموعه داده Vbase roads استفاده شد. حداقل فاصله با استفاده از ابزار Near (جعبه ابزار تحلیل) در ArcMap، با استفاده از نقاط لغزش گزارش شده از RegObs، و نقاط تولید شده از مرکز چندضلعی های زمین لغزش نقشه برداری شده با استفاده از ابزار Feature-to-Point (جعبه ابزار مدیریت داده) برآورد شد.
4.2.2. نقشه برداری میدانی مقدماتی و تأیید
تأیید نقشه اولیه از طریق بازدیدهای میدانی (در ماه آگوست و اکتبر 2019) و پرواز هلیکوپتر (اکتبر 2019) انجام شد. سپس نقشه اولیه به روز شد تا شامل چندین لغزش کوچک مشاهده شده در طول پرواز هلیکوپتر باشد که در تصویر قابل مشاهده بود اما به دلیل عدم قطعیت در نقشه اولیه گنجانده نشده بود. در نهایت، مقایسه ای با نقشه دقیق زمین لغزش های تولید شده توسط همکار D. Rüther انجام شد. نقشه میدانی دقیق توسط روتر در ابتدا با مقایسه بصری تصاویر Sentinel-2 قبل و بعد از رویداد تهیه شد، سپس بر اساس تحقیقات میدانی گسترده (در آگوست و سپتامبر 2019، و می، ژوئن و اوت 2020) به روز شد. عکس های ارتوپدی پهپادی گزیده ای از عکس های این کار میدانی در شکل 4 نشان داده شده استو گزارش مفصلی از مشاهدات میدانی نیز موجود است [ 36 ]. این فهرست زمین لغزش ها را به مناطق رهاسازی، حمل و نقل و رسوب تقسیم می کند و وضوح بسیار بالاتری نسبت به طرح های موجودی S2-BT دارد.
4.2.3. مقایسه بین چهار رویکرد نقشه برداری دستی
فهرست زمین لغزش تایید شده تولید شده از تصویر S2-BT به عنوان خط پایه برای مقایسه سه رویکرد دیگر استفاده شد. سایر تصاویر ابتدا به صورت بصری برای لغزش قابل مشاهده بررسی شدند. سپس، فهرست S2-BT کنار زمین برای جستجوی سیستماتیک آثار زمین لغزش های شناخته شده قبلی در هر یک از تصاویر دیگر استفاده شد. به دنبال سیستم طبقه بندی استفاده شده توسط [ 46 ]، زمین لغزش های شناخته شده قبلی به یکی از سه مجموعه طبقه بندی شدند – یعنی در مجموعه 1 ، لغزش ها در تصویر SAR-RGB قابل مشاهده نبودند. در مجموعه 2 ، لغزش ها به سختی قابل مشاهده بودند، تنها با توجه به آگاهی قبلی از مکان، قابل تشخیص بودند. در مجموعه 3 ، رانش زمین به وضوح قابل مشاهده بود.
4.2.4. دید زمین لغزش در قطبش های VV و VH و تأثیر زاویه وقوع محلی
برای تجزیه و تحلیل تفاوت در دید زمین لغزش در قطبش های VV و VH، ابتدا یک رویکرد کیفی برای مقایسه، با بررسی مجموعه ای از زمین لغزش های منفرد در قطعات فرعی با جزئیات استفاده شد. در مرحله بعد، دادههای سری زمانی که مقادیر شدت پسپراکندگی دو زمین لغزش را نشان میدهند، با زوایای فرود محلی کم و زیاد، تجزیه و تحلیل شدند.
5. نتایج
5.1. تجزیه و تحلیل سوگیری فضایی با نقشه برداری اولیه زمین لغزش با استفاده از Sentinel-2 dNDVI
شکل 5 توزیع مکانی زمین لغزش های نقشه برداری شده از تصویر S2-BT و لغزش های ثبت شده از NLDB را نشان می دهد که در www.skredregistrering.no (دانلود شده از NVE، 18 دسامبر 2019) در 30 ژوئیه 2019 در Jølster، نروژ در دسترس است. در طول راستیآزمایی، تفاوتهای جزئی بین دو موجودی به دلیل درشتتر بودن وضوح تصویر 10 متری تصویر S2-BT (بهعنوان مثال، خوشهبندی زمینلغزشهای کوچک به یک بزرگ)، در مقایسه با موجودی با وضوح بالاتر Rüther پیدا شد. با این حال، به طور کلی، آنها نسبتا سازگار بودند.
همچنین مکان هایی را که با استفاده از هلیکوپتر یا پهپاد یا با پای پیاده بررسی شده اند را نشان می دهد. بر اساس ثبات مشاهدات، همراه با پنجره کوتاه اکتساب (پنج روز) بین تصاویر قبل و بعد از رویداد، نویسندگان به نتایج نقشه برداری Sentinel-2 در محدوده 10 متری فضایی اطمینان بالایی دارند. وضوح. در مجموع 120 زمین لغزش در محدوده <0.01 کیلومتر مربع تا نزدیک به 1 کیلومتر مربع در منطقه ( شکل 6 ) در سراسر منطقه نقشه برداری شد که بیش از 14 زمین لغزش ثبت شده هشت برابر افزایش یافته است. اکثر این (بیش از 80٪) زمین لغزش های کوچک (<0.01 کیلومتر مربع ) بودند. نتایج تحلیل سوگیری فضایی در شکل 6 ارائه شده است. مشاهده می شود که تقریباً همه زمین لغزش های ثبت شده در 500 متری یک جاده واقع شده اند (100٪ رویدادها از Jølster و 94.9٪ از کل زمین لغزش ها برای کل شهرستان)، در حالی که تنها یک سوم از زمین لغزش های نقشه برداری شده در 500 متر بوده است. از یک جاده در حالی که تجزیه و تحلیل دقیق مکانیسمهای ماشه و شکست فراتر از محدوده این مقاله است، ما دوباره متذکر میشویم که اکثر زمین لغزشها در شیبهای باز رخ دادهاند و تا سطح سنگ بستر صیقلی پوشاننده فرسایش کمعمق دارند. به نظر میرسد که توزیع مکانی زمین لغزشها بهشدت توسط مکان بالاترین شدت بارندگی طوفان تندری بسیار موضعی [ 27 ] کنترل میشود، با تغییرات توپوگرافی محلی جزئی (مقیاس زیرمتری) که مناطق شروع دقیق را تعیین میکند [ 36 ].
5.2. مقایسه دید زمین لغزش بین رویکردها
شکل 7 تصاویر dNDVI S2-BT و S2-MT را نشان می دهد که منطقه مورد مطالعه را پوشش می دهد. رانش زمین در هر دو تصویر بسیار واضح است. با این حال، کامپوزیت سبزترین پیکسل بدون ابر، S2-MT، صدای کمتری از ابرها، سطح بالای آب در رودخانهها و مزارع کشاورزی داشت. تصاویر ترکیبی SAR-RGB هم قطبی (VV) S1-BT و S1-MT در شکل 8 نشان داده شده است.. مجدداً، بهبود قابلتوجهی در دید زمین لغزش در تصویر چند زمانی، S1-MT، و همچنین نویز پسزمینه کمتر و آثار باستانی زمین (عمدتاً کوتاهشدن)، در مقایسه با S1-BT مشاهده میشود. با این حال، سیگنال های دیگری که سبز روشن به نظر می رسند هنوز باید از زمین لغزش ها متمایز شوند. این تغییرات شامل تغییرات در مناطق کشاورزی و پوشش برف، و همچنین برخی از ویژگی های توپوگرافی و لکه های عمومی است. انواع مختلف پوشش گیاهی نیز در این تصویر دیده می شود. صنوبر کاشته شده تجاری به صورت مناطق روشن در ارتفاعات پایین تر دره ها ظاهر می شود، در حالی که پوشش گیاهی درخت غان و درختان آلپ تیره تر هستند، معمولاً در ارتفاعات بالاتر. زمین های کشاورزی و چمن به صورت لکه های سبز تیره یا بنفش در دره های پایین تر ظاهر می شوند. زمین لغزش باید از سایر مناطق سبز روشن متمایز شود، به عنوان مثال،شکل 8 ، S2-MT، گوشه SE)، یا برداشت زمین های چمن.
برای مقایسه کمی قابلیت تشخیص زمین لغزش بین این تصاویر، فهرست زمین لغزش تولید شده با استفاده از تصویر S2-BT به عنوان خط پایه برای مقایسه استفاده شد. دید زمین لغزش در S2-MT در مقایسه با S2-BT تفاوت معنی داری نداشت، بنابراین در نتایج زیر لحاظ نشد. هر زمین لغزش به طور سیستماتیک در تصاویر Sentinel-1 جستجو شد و با توجه به قابلیت تشخیص آنها در اقتباسی از سیستم مورد استفاده توسط [ 46 ] طبقه بندی شد. همانطور که در جدول 3 نشان داده شده است ، قابلیت تشخیص زمین لغزش با استفاده از تصویر S1-MT در مقایسه با تصویر S1-BT به طور قابل توجهی بهبود یافته است. با این حال، زمین لغزش هایی که قابل تشخیص در نظر گرفته می شوند، به ترتیب، تنها 7.5٪ و 43٪ از 120 زمین لغزش نقشه برداری شده با تصویر S2-BT را نشان می دهند.
شکل 9 زیرمجموعه ای از لغزش هایی را نشان می دهد که در تصویر S1-BT قابل تشخیص بودند، از جمله، از بالا به پایین، S2-BT، S2-MT، و S1-MT در قطبش VV، و S1-MT در قطبش VH. شرح کوتاهی از قابلیت دید زمین لغزش در تصاویر S2 ارائه شده است، به دنبال مشاهدات دقیق تر برای تصاویر S1. در تصاویر S2 مشاهده می شود که لغزش ها به وضوح از پس زمینه قابل تشخیص هستند و حتی لغزش های کوچک و کم عمق در Tindefjellet (ستون 4) به وضوح خودنمایی می کنند.
به طور کلی، تصویر S2-MT بهترین برای تشخیص زمین لغزش در نظر گرفته شد. تفاوت در دید زمین لغزش، در مقایسه با BT، قابل توجه نیست. با این حال، کاهش نویز از ابرها و کشاورزی نشان دهنده بهبودی نسبت به تصویر BT است. مقداری نویز از کشاورزی در قطعه فرعی S2-BT Vassenden قابل مشاهده است که در تصویر S2-MT به میزان قابل توجهی کاهش می یابد. در تصاویر رنگی واقعی Sentinel-2 سطح 2A (نشان داده نشده)، تشخیص زمین لغزش های جدید از زمین لغزش های قدیمی دشوار است. دید زمین لغزش نیز توسط سایهها محدود میشود، بهویژه در شیبهای رو به شمال، اگرچه در تصویر سطح 2A در مقایسه با تصویر سطح 1C، به طور قابلتوجهی بهبود یافته است. علاوه بر این، لغزش های کوچکتر در Tindefjellet به راحتی از پوشش گیاهی پس زمینه قابل تشخیص نیستند که در تصویر dNDVI هستند.
5.3. دید زمین لغزش در قطبش های VV و VH
در دو ردیف پایین شکل 9 ، تصاویر S1-MT با استفاده از قطبش های VV و VH نشان داده شده است. لغزش های نشان داده شده در قطعات فرعی با جزئیات بیشتر به شرح زیر است:
-
لغزش Vassenden به وضوح در قطبش VV از بالا تا دم به نظر می رسد. با این حال، آن را به سختی در قطبش VH قابل مشاهده است. در قطبش VH، زمین لغزش به راحتی از مناطق پوشش گیاهی اطراف، به ویژه چمن قابل تشخیص نیست. قسمت بالایی در تصویر VH کمی قابل مشاهده است. با این حال، این بدون دانش قبلی انتخاب نمی شود.
-
جدای از ناحیه ای با اعوجاج تصویر به دلیل اصلاح زمین در منطقه شروع زمین لغزش ها، لغزش های بزرگ Slåtten بیشتر در تصویر S1-MT VV قابل مشاهده هستند. با این حال، مرزهای بین زمین لغزش های جداگانه کمتر از مرزهای موجود در تصاویر S2 واضح است. لغزش های کوچکتر در غرب زمین های بزرگ به سختی قابل مشاهده هستند. باز هم، در تصویر VH، مناطق رسوبی زمین لغزش ها به سختی از چمن های اطراف قابل تشخیص هستند. با این حال، برخی از کانال های فرسایش یافته اندکی در منطقه لغزش در غرب و مرکز زمین لغزش های بزرگ قابل مشاهده است.
-
در ارنس، لغزش به وضوح در قطبش VV به غیر از اعوجاج در منطقه شروع به نظر می رسد، در حالی که در قطبش VH، دوباره فقط برخی از مناطق کانال قابل مشاهده هستند.
-
در Tindefjellet، لغزش های کوچک در هر دو قطبش VV و VH قابل مشاهده است، اگرچه در VV روشن تر به نظر می رسد.
تفاوت در دید به صورت کمی در شکل 10 و جدول 4 نشان داده شده است . شکل 10 افزایش کلی در شدت پس پراکندگی را با تغییر پوشش زمین از پوشش گیاهی به غیر گیاهی نشان می دهد. به طور کلی، شدت پس پراکندگی در Tindefjellet بیشتر از Vassenden است. مشاهده می شود که برای لغزش نمونه برداری شده در Tindefjellet، تفاوت واضحی بین میانگین شدت پراکندگی پس در هر دو VV (5.8 دسی بل) و VH (6.4 دسی بل)، با بیشترین تغییر در VH وجود دارد. برای زمین لغزش نمونه برداری شده در Vassenden، تفاوت در میانگین کمتر از آنچه در Tindefjellet، برای هر دو VV (2.2 دسی بل) و VH (1.2 دسی بل) است. با این حال، بزرگترین تفاوت در VV است.

شکل 10. نمودارهای سری زمانی داده Sentinel-1 از پیکسلهای درون زمین لغزشهایی که در 30 ژوئیه 2019 از بوتههای کوهستانی و توس به خاک لخت تغییر کردهاند. VV به پسپراکندگی همقطبی و VH به پسپراکندگی متقاطع اشاره دارد. Tindefjellet (6.129393, 61.514124); Vassenden (6.105213, 61.500352). خطوط چین میانگین ماه را نشان می دهد که در جدول 4 نیز نشان داده شده است.
6. بحث
6.1. بهبود دید زمین لغزش با کامپوزیت های چند زمانی و کاهش تعصب فضایی
تشخیص زمین لغزش در مناطق دورافتاده گامی ضروری در ایجاد فهرستهای زمین لغزش غیرمکانی است که مدلهای پیشبینیکننده مورد استفاده در سیستمهای هشدار زودهنگام زمین لغزش را تنظیم و تأیید میکنند و ارزیابیهای خطر و خطر زمین لغزش را اطلاع میدهند. نتایج حاصل از این مطالعه موردی پتانسیل زیادی را برای استفاده از تصاویر Sentinel-2 با وضوح متوسط (10 متر) آزادانه در دسترس برای نقشه برداری زمین لغزش نشان داد. تصاویر S2-dNDVI را می توان از هر دو محصول سطح 1C و سطح 2A تولید کرد و زمین لغزش ها را می توان به راحتی با وضوح 10 متر بدون توجه به جهت شیب، نوع پوشش گیاهی و عمق فرسایش نقشه برداری کرد. با استفاده از این رویکرد، تعداد زمین لغزش های شناسایی شده بیش از 8 برابر افزایش یافت و اطلاعات اندازه را می توان به سرعت به دست آورد. علاوه بر این، سوگیری فضایی به طور قابل توجهی در این مطالعه موردی کاهش یافت، تنها یک سوم زمین لغزش ها در 500 متری جاده واقع شده است، در حالی که این رقم برای منطقه 95 درصد است. اطلاعات اضافی مورد نیاز برای تایید هشدارهای زمین لغزش (نوع و عواقب) در این مطالعه تعیین نشد. با این حال، چنین اطلاعاتی را میتوان با مقایسه با زمین لغزشهای گزارششده یا نقشههای ساختمانی برای تعیین پیامدها، یا با بررسی مجاورت کانالها و شکل زمین لغزش برای تعیین انواع، به زمین لغزشهای نقشهبرداری شده از راه دور اضافه کرد.
کامپوزیت های تصویر چند زمانی تولید شده با GEE، به ترتیب با کاهش نویز از لکه ها و ابرها، وضوح تصاویر S1 و S2 را در مقایسه با تصاویر دو زمانه به طور قابل توجهی بهبود بخشیدند. علاوه بر این، کد سریع اجرا می شود، تصاویر به راحتی می توانند برای تاریخ ها و مکان های مختلف تکثیر شوند، نیازی به نرم افزار نیست، و نیازی به دانلود و ذخیره مقادیر زیادی داده نیست. برای مطالعه موردی Jølster، قابلیت تشخیص زمین لغزش در تصاویر S2-MT بیشتر از تصاویر S1-MT بود. با این حال، رویکرد S2-MT بسیار وابسته به فصل است. تغییر در پوشش برف، تاریکی، کمبود پوشش گیاهی سبز، از بین رفتن پوشش گیاهی به دلیل فرآیندهای غیر رانش زمین و دوره های طولانی هوای ابری از محدودیت های اصلی این روش است.
از سوی دیگر، دید لغزش در تصویر S1-MT (VV) برای Jølster فراتر از انتظارات ما بود. زمین لغزش های بزرگ در منطقه مورد مطالعه به وضوح قابل مشاهده بود و در برخی موارد می توان با دقت معقولی نقشه برداری کرد. علاوه بر این، حتی برخی از زمین لغزش های کم عمق کوچک که در NLDB نبودند، قابل مشاهده بودند، اگرچه بیشتر در دامنه های رو به شرق بودند. این روش به دلیل عدم وجود پوشش گیاهی سبز مورد نیاز برای نتایج موثر dNDVI، پتانسیل قابل توجهی بیشتری برای تشخیص سریع زمین لغزش هایی که در خارج از فصل تابستان رخ می دهند نسبت به روش S2-MT دارد. برخی آزمایشات سریع فراتر از منطقه مورد مطالعه (به عنوان مثال، رویداد نشان داده شده در https://www.regobs.no/Registration/278548، مشاهده شده در 18 ژانویه 2022) نشان داد که این روش می تواند برای شناسایی زمین لغزش هایی که در زمستان رخ می دهد، یعنی زمانی که داده های بدون ابر در دسترس نیست، استفاده شود. با این حال، به دلیل نویز ناشی از تغییرات در پوشش برف، به نظر می رسد این رویکرد برای تأیید لغزش های گزارش شده در جایی که فقط مکان های تقریبی داده شده است (به عنوان مثال، از گزارش های خبری)، به جای نقشه برداری زمین لغزش ها در مناطق بزرگ مفیدتر است.
6.2. تفاوت رویکردها با روشهای مشابه
رویکرد ما برای ایجاد تصاویر S2-MT بسیار شبیه به روش استفاده شده در برنامه HazMapper GEE [ 29 ] است، با یک تفاوت: برنامه HazMapper از مقدار درصد نرمال شده dNDVI استفاده می کند، در حالی که ما از dNDVI معمولی استفاده می کنیم. علاوه بر این، با برنامه HazMapper GEE، نتایج با استفاده از مقیاس رنگ قرمز به آبی تجسم می شوند، در حالی که ما از سیاه و سفید استفاده می کنیم. هر دو به خوبی برای تشخیص زمین لغزش کار می کنند. با این حال، یک مزیت HazMapper نسبت به رویکرد در این مقاله این است که ابزار HazMapper در قالب برنامه در دسترس است، که برای کسانی که استفاده از اسکریپت ها راحت نیستند مفید است.
با توجه به Sentinel-1، رویکرد ما برای ایجاد تصویر S1-BT از روش [ 46 ] الهام گرفته شده است، با برخی تفاوتها در پیش پردازش و تجسم. با این حال، نتایج ما در تضاد کامل با نتایج مطالعه در مرجع [ 46 ] بود که بر اساس آن 83 درصد زمین لغزشها (تعداد موارد آزمایش = 27/32) قابل تشخیص در نظر گرفته شدند. در مقایسه، در این مطالعه کمتر از 10 درصد از زمین لغزش های نقشه برداری شده S2-BT قابل تشخیص در کامپوزیت S1-BT در نظر گرفته شد (9/120). این اختلاف تا حد زیادی به دلیل اندازه زمین لغزش های موجود در [ 46 ] قابل توضیح است که در آن اکثر موارد موفق بیش از 0.05 کیلومتر مربع بودند .در منطقه، و تنها چهار نمونه از زمین لغزش های کوچکتر از این گنجانده شده است. در مقابل، فهرست زمین لغزش های Jølster دارای اکثر زمین لغزش ها با اندازه کمتر از 0.01 کیلومتر مربع است . بزرگترین زمین لغزش های حاصل از مطالعه Jølster (بیش از 0.03 کیلومتر مربع ) نیز حداقل تا حدی در کامپوزیت S1-RGB قابل مشاهده بودند. لغزشهای کوچکتر هیچ پیامد مستقیمی برای جمعیت محلی نداشتند، بنابراین با در نظر گرفتن این موضوع، این یافتهها نتایج [ 46 ] را رد نمیکند، یعنی دادههای Sentinel-1 به عنوان منابعی برای شناسایی زمین لغزشهای سریع در شرایط اضطراری هستند. شرایطی که پوشش ابری وجود دارد.
با توجه بیشتر به [ 46 ]، یک محدودیت عمده روش آنها فیلتر کردن لکه بود. آنها بحث کردند که نتایج بهتری را می توان با تنظیم پارامتر به صورت موردی به دست آورد. در تصویر S1-MT ما، هیچ فیلتر لکه خاصی اعمال نشد. با این حال، ما دریافتیم که میانگین مقادیر پیکسل در طول زمان به طور موثر نیاز به این مرحله را از بین می برد. در واقع، جدا از زمان صرفهجویی شده با استفاده از کاتالوگ دادههای GEE، این بزرگترین مزیت رویکرد S1-MT در مقایسه با استفاده از تصاویر منفرد است – لکهها بهطور قابلتوجهی با میانگینگیری در طول زمان به جای فضا کاهش مییابند، بدون اینکه وضوح فضایی و تفکیک مکانی به خطر بیفتد. از دست دادن جزئیات در مرزهای شی
با این حال، یک هشدار باقی میماند، زیرا این روش زمانی مناسبتر است که بتوان بازتاب پیکسل را از نظر زمانی همگن فرض کرد. در جایی که تغییرات فصلی به طور قابل توجهی بر خواص پراکندگی پوشش زمین در طول زمان تأثیر می گذارد، به عنوان مثال، از بین رفتن برگ ها یا پوشش برف، با استفاده از تصاویر قبل از رویداد از همان ماه در سال قبل، به جای قبلی، نتایج بهتری حاصل می شود. ماه این در [ 31 ] نیز قابل مشاهده بود، که در آن دقت پیشبینیها عموماً با میانگینگیری در تعداد فزایندهای از تصاویر افزایش مییابد (با نرخ افزایش نشاندهنده فروپاشی نمایی با افزایش تعداد تصاویر)، به جز زمانی که تصاویر پاییز و زمستان هستند. گنجانده شده اند.
تولید تصویر S1-MT نسبتا مشابه روش ارائه شده توسط [ 31 ] بود. تفاوتهای بین روشها شامل محاسبات تصحیح زمین کمی متفاوت بود (آموزشی مبانی SAR در GEE توسط دکتر اریک بولاک در دسترس است: https://www.youtube.com/watch?v=JZbLokRI8as&t=1213s ، در 18 ژانویه 2022 مشاهده شده است) و تجسم نتایج ما دریافتیم که کامپوزیت RGB اطلاعات زمین زمینه ای بیشتری را برای شناسایی بصری زمین لغزش ها نسبت به نتایج تفاوت تک باندی ارائه می دهد. با این حال، به عنوان ورودی برای تشخیص تغییر خودکار، قالب تک باند احتمالا مناسب تر است.
در نهایت، ما توجه میکنیم که به نظر میرسد رویکردهای SAR بهخوبی در چشمانداز یخبندان در Jølster کار میکنند. بیشتر زمین لغزش ها در دامنه های باز رخ داده و بنابراین نسبت به محیط اطراف خود نسبتاً قابل مشاهده هستند. کنارههای درهای که به آرامی فرسایش یافتهاند نیز احتمالاً منجر به تصاویر SAR تصحیحشده زمین نسبت به مناطقی با مورفولوژی سنگ بستر جوانتر، از نظر تکتونیکی پیچیدهتر شدهاند. علاوه بر این، DEM های موجود در سطح جهانی در Google Engine در حال حاضر تنها با وضوح 30 متر در دسترس هستند، بنابراین مناطقی با برآمدگی های زاویه ای و دره های مکرر ممکن است در مقایسه با نتایج ما عملکرد کمتری داشته باشند. به نظر نمیرسد گسلهای معدود در منطقه مورد مطالعه ما تأثیری بر توزیع زمین لغزش داشته باشد. در عوض، به نظر می رسد مکان آنها به شدت با توزیع بارش های سنگین مرتبط است،36 ]. در مناظر فعال تکتونیکی، درههای باریکتر، زاویهدار، و صفحات لغزشی کنترلشده با گسل، دیدن رخدادهای زمین لغزش میتواند دشوارتر باشد. این ممکن است در آینده نزدیک با DTM های با وضوح بالاتر و داده های SAR بهبود یابد.
6.3. خواص پراکندگی قطبی پوشش گیاهی و زمین لغزش
با این حال، شاید جالب ترین تفاوت با [ 31 ] این بود که ما دید لغزش را در هر دو قطبش VV و VH آزمایش کردیم و نتایج بسیار بهتری را با استفاده از VV یافتیم ( شکل 9 )، در حالی که آنها فقط VH را آزمایش کردند. دلیل آنها برای استفاده از VH این بود که قطبش های متقابل به ساختار جنگل زیست توده حساس تر هستند و بنابراین برای شناسایی زمین لغزش در مناطق پوشش گیاهی مفید هستند. آنها مطالعات دیگر را برای کشف استفاده از قطب بندی های دیگر تشویق کردند. به طور مشابه، از دیدگاه جنگلداری، مرجع [ 47 ] نوشت: “مشاهدات متقاطع [VH] برای شناسایی تغییرات از حجم به سطوح ضروری هستند .” از سوی دیگر، رجوع به [ 46] همچنین تشخیص زمین لغزش را با هر دو VV و VH آزمایش کرد و اظهار داشت: “ما متوجه تعریف بهتری از تغییرات در قطبش VH زمانی که لغزش ها در مناطقی که قبلاً با پوشش گیاهی عمیقی داشتند، شدیم، در حالی که VV گاهی اوقات تعریف و تضاد بیشتری را در حضور یخچال ها یا برف ارائه می دهد.” .
به منظور درک بهتر اختلاف بین نتایج ما و انتظاراتی که VH برای تشخیص زمین لغزش مفیدتر است، یک مدل مفهومی را در شکل 11 ارائه می کنیم.و برخی از عناصر کلیدی موثر بر پاسخ شدت پس پراکندگی SAR را مورد بحث قرار دهید. شدت پراکندگی برگشتی در قطبش های VV و VH به بازتاب مکانیزم های پراکندگی سطحی (خاک لخت) و حجمی (پوشش گیاهی) بستگی دارد. برای زمین لغزشهایی با اسکارپهای مسطح، زاویه سطح زمین لغزش نسبت به صفحه رادار، چگالی نسبی سیگنال دریافتی و میزان انعکاس سیگنال به سمت یا دور از سنسور را تعیین میکند. برای لغزش های کانالی شده، با LIA بالا، تغییرات در پوشش گیاهی در سمت کانالی که به سمت سنسور است، بیشتر تشخیص داده می شود. شدت پراکندگی برگشتی VH به دلیل رفتار پراکندگی سه بعدی پوشش گیاهی کمتر تحت تأثیر LIA قرار می گیرد. تفاوت بین VV و VH در زوایای بروز موضعی کوچکتر (تا 30 درجه) بارزتر است.
مکانیسم پراکندگی سطحی و زاویه تابش موضعی در تعیین شدت پراکندگی برگشتی در قطبش همزمان و متقاطع مرتبط هستند. خواص دی الکتریک، از جمله محتوای آب سطحی، نیز مرتبط است [ 48 ]. با این حال، ما فرض کردیم که این به طور قابل توجهی بین مکان های مقایسه شده متفاوت نیست.
زمین لغزش و پوشش گیاهی هر دو اجزای مکانیزم پراکندگی سطحی و حجمی را نشان دادند ( جدول 4 ). لغزش ها همانطور که انتظار می رفت رفتار کردند [ 47 ]، عمدتاً به عنوان یک سطح ناهموار با مقداری پراکندگی حجمی، منعکس کننده یک سیگنال هم قطبی قوی (VV) و یک سیگنال متقاطع کم تا متوسط کم (VH) به گیرنده. با این حال، برای پوشش گیاهی، به جای یک پاسخ پراکندگی حجمی عمدتا، ما مشاهده کردیم که مناطق پوشش گیاهی نیز سیگنال قویتری در VV نسبت به قطبش VH دادند. در نظر گرفته می شود که این به دلیل کم بودن پوشش گیاهی است که اجازه انعکاس بیشتر از سطح زمین را می دهد.
در مثال Vassenden، شدت پراکندگی برگشتی در مقایسه با زمین لغزش Tindefjellet در زاویه بروز بالاتر کاهش یافت. این به دلیل دریافت چگالی انرژی کمتری در سطح زمین لغزش است. تفاوت در شدت پس پراکندگی در مناطق پوشش گیاهی، هر دو در قطبش VV و VH، آشکارتر بود، در حالی که خاک لخت سیگنالهای قدرت مشابهی را در هر دو قطبش تولید میکرد. این احتمالاً به این دلیل است که سطح بسیار ناهموار زمین لغزشهای تازه، سطوح انعکاسی فراوانی را فراهم میکند، در حالی که به نظر میرسد قدرت بازتابی پسپراکندگی از پوشش گیاهی بیشتر تحتتاثیر چگالی اولیه انرژی دریافتشده است.
با این حال، این یافتهها برخلاف نتایج یک مطالعه در مورد خواص پراکندگی قطبی زمین لغزشها در مناطق جنگلی است [ 49 ]، جایی که مشخص شد «…در مناطق زمین لغزش، شاخصهای پلاریمتری ps [VV]، pv [VH] به شدت تغییر میکنند. با زاویه تابش محلی، در حالی که در مناطق جنگلی، این شاخص ها بدون توجه به تغییر زاویه بروز محلی پایدار هستند . با این وجود، این تفاوت می تواند به دلیل استفاده از داده های PALSAR-2 باند L باشد، با طول موج های بلندتر (λ~25 سانتی متر) که نسبت به باند Sentinel-1 C (λ = 5.6 سانتی متر) به عمق سایبان نفوذ می کند. علاوه بر این، مناطق جنگلی اشاره شده توسط [ 49] در ژاپن به نظر می رسد در مقایسه ما بسیار متراکم تر و چوبی تر از مناطق پوشش گیاهی است. بنابراین، تحقیقات بیشتری در مورد تأثیر نوع پوشش گیاهی و طول موج بر روی دید زمین لغزش ها در داده های SAR متقابل و هم قطبی مورد نیاز است.
6.4. توصیه ها و دستورالعمل های تحقیقاتی آتی
تصاویر تشخیص تغییر با استفاده از S1 و S2 را می توان به راحتی برای محدوده تاریخ و مکان های مختلف با استفاده از GEE بازتولید کرد. برای تشخیص دستی زمین لغزش، رویکرد S2-MT زمانی توصیه می شود که پوشش گیاهی سبز وجود داشته باشد، و رویکرد ترکیبی S1-MT و S2-MT در موارد دیگر توصیه می شود، یا زمانی که یک کامپوزیت بدون ابر رضایت بخش به دست نمی آید. تحقیقات بیشتری برای درک اینکه چقدر می توان این روش ها را در شرایط مختلف پوشش گیاهی و فصلی به کار برد، مورد نیاز است. با این حال، این احتمال وجود دارد که از کامپوزیت های SAR-RGB برای شناسایی زمین لغزش ها استفاده شود، زمانی که تصویر S2-dNDVI نتایج خوبی به همراه ندارد، به عنوان مثال، زمانی که ابرها، برف یا تاریکی پوشش گیاهی را پوشانده است، یا به دلیل کمبود فصلی رنگ سبز. زندگی گیاهی. روش دیگر، برای اهداف نقشه برداری، تصاویر S2-MT را می توان با استفاده از تصاویر دوره های تابستانی در سال های متوالی ایجاد کرد تا زمین لغزش هایی را که در خارج از ماه های تابستان رخ داده است شناسایی کند. با این حال، فاصله زمانی طولانی تر، سیگنال های منفی dNDVI اضافی را معرفی می کند که می تواند تشخیص زمین لغزش ها را دشوارتر کند.
پیشرفتهای مداوم در دسترسی به دادهها و پیشپردازش تصاویر، گزینههای بیشتری را برای کاوش فراهم میکند. اینها شامل یک مجموعه نوری هماهنگ ترکیبی از تصاویر Sentinel-2 و Landsat [ 50 ]، و ماهواره های NISAR که قرار است در سال 2023 با قابلیت های SAR باند L و S پرتاب شوند [ 51 ] است.
در تلاش برای توسعه سیستمی برای تشخیص مداوم زمین لغزش ها در مناطق بزرگ، مناسب ترین پلت فرم GEE است، زیرا مجموعه داده های متعدد (به عنوان مثال، نوری، SAR، رطوبت خاک، بارش، شیب، نوع پوشش زمین) را می توان ترکیب کرد و تجزیه و تحلیل ها را به سرعت انجام داد. در مناطق وسیع علاوه بر این، امکان اجرای کامل فرآیند پیش پردازش تصویر، آموزش طبقه بندی کننده و اجرای مدل طبقه بندی در این پلت فرم وجود دارد. ما در حال حاضر در حال ایجاد یک پایگاه داده از زمین لغزش های تایید شده قابل مشاهده در تصاویر ماهواره ای در سراسر نروژ هستیم و امیدواریم که فهرست زمین لغزش تولید شده در این مطالعه در مجموعه داده های آموزشی در توسعه آینده مدل های تشخیص زمین لغزش آموزش دیده در سطح جهانی گنجانده شود.
7. نتیجه گیری
این مطالعه به دنبال بررسی روشهای تشخیص تغییر مبتنی بر تصویر ماهوارهای برای تشخیص زمین لغزش، به منظور بهبود سوگیری فضایی و کامل بودن فهرستهای زمین لغزش است. یک فهرست اولیه زمین لغزش با استفاده از یک رویکرد تشخیص تغییر مبتنی بر NDVI متعارف تولید شد که متعاقباً توسط هلیکوپتر، هواپیماهای بدون سرنشین و مشاهدات میدانی تأیید شد. ما نشان دادیم که چگونه سوگیری فضایی و کامل بودن موجودی را می توان با استفاده از این روش در مقایسه با روش فعلی بهبود بخشید. سپس ما با استفاده از هر دو تصویر Sentinel-1 و Sentinel-2 مقایسه کردیم که چگونه دید لغزش در تصاویر تشخیص تغییر را میتوان با ترکیبهای تصویر چندزمانی به جای روشهای دو زمانی (یعنی جفت تصاویر قبل و بعد از رویداد) بیشتر بهبود بخشید. در موتور Google Earth. سرانجام، ما به طور مفصل چگونگی تأثیر قطبیت بر رویت لغزش در تصاویر SAR را بررسی کردیم. یافته های اصلی به شرح زیر خلاصه می شود:
-
فهرست رویداد زمین لغزش برای Jølster تولید شده در این مطالعه شامل 120 زمین لغزش است که از تصویر تشخیص تغییر دوزمانی Sentinel-2 با وضوح 10 متر نقشه برداری شده است. این نشان دهنده بهبود قابل توجهی در کامل بودن موجودی است، با 14 زمین لغزش اولیه که در NLDB برای این رویداد گزارش شده است.
-
انحراف فضایی نسبت به جاده ها نیز به طور قابل توجهی کاهش یافت، با درصد لغزش های واقع در 500 متری جاده از 100٪ در NLDB از گزارش زمین لغزش زمین به حدود کاهش یافت. 30٪ در فهرست زمین لغزش نقشه برداری از راه دور.
-
دید زمین لغزش برای هر دو Sentinel-1 و Sentinel-2 با استفاده از کامپوزیت های تصویر چند زمانی به جای کامپوزیت های دو زمانی بهبود یافت. برای Sentinel-1، این به دلیل کاهش نویز از لکه ها و حذف ابرها برای Sentinel-2 بود.
-
رانش زمین به وضوح در تصاویر S2 dNDVI ظاهر شد. برای این مطالعه موردی، از آنجایی که یک تصویر نسبتاً بدون ابر خیلی زود پس از رویداد در دسترس بود، در مقایسه با رویکرد BT برای دادههای Sentinel-2، بهبود مزیت بزرگی در دید زمین لغزش در استفاده از رویکرد MT مشاهده نشد.
-
از سوی دیگر، با اعمال این روش، بهبود قابل توجهی در وضوح تصویر Sentinel-1 به دست آمد که تعداد زمین لغزش های قابل تشخیص از 9 در تصویر S1-BT به 52 در تصویر S1-MT افزایش یافت. کامپوزیت های تصویر MT نیز به طور قابل توجهی سریعتر از تصاویر BT تولید می شدند، بدون نیاز به دانلود مقادیر زیادی داده. در تصاویر S1-MT و S1-BT به ترتیب 52 و 9 مورد از 120 زمین لغزش نقشه برداری شده قابل تشخیص در نظر گرفته شد. ما توجه می کنیم که، اگرچه نرخ های تشخیص زمین لغزش با استفاده از تصاویر S1-MT کمتر از سایر مطالعات با استفاده از روش های BT بود (به عنوان مثال، 83٪ در [ 46 ]])، اندازه متوسط زمین لغزش ها در مجموعه ما به طور قابل توجهی کوچکتر از موارد مورد بررسی در مطالعه فوق الذکر بود، و تعدادی از آنها در تصویر S1-MT قابل مشاهده بودند اما در تصویر S1-BT قابل مشاهده نیستند.
-
برخلاف سایر مطالعات، لغزشهای زمین در منطقه مورد بررسی ما با استفاده از قطبش VV در مقایسه با قطبش VH بسیار واضحتر ظاهر شدند. ما یک مدل مفهومی برای کمک به توضیح این نتایج ارائه کردیم.
نتایج ما نشان میدهد که (الف) تشخیص زمین لغزش دستی یا خودکار میتواند به طور قابل توجهی با تجزیه و تحلیل ترکیبهای تصویری چند زمانی، با استفاده از تصاویر رصد زمین و موتور Google Earth در دسترس به طور قابل توجهی بهبود یابد، و (ب) استفاده سیستماتیک از این روشها میتواند به طور قابل توجهی سوگیری فضایی را بهبود بخشد. و کامل بودن موجودی زمین لغزش.
مشارکت های نویسنده
مفهوم سازی، EL; روش شناسی، EL و RF. نرم افزار، EL و RF؛ اعتبارسنجی، EL، DR و RF؛ تجزیه و تحلیل رسمی، EL; بررسی، EL، DR، RF و LR. منابع، EL، DR، RF و LR. مدیریت داده، EL و DR. نوشتن – آماده سازی پیش نویس اصلی، EL; نوشتن – بررسی و ویرایش، EL، RF و LN. تجسم، EL و DR. نظارت، RF، LR، JS و SN؛ مدیریت پروژه، EL; تأمین مالی، EL، DR و RF همه نویسندگان نسخه منتشر شده نسخه خطی را خوانده و با آن موافقت کرده اند.


بدون دیدگاه