1. معرفی
اخیراً، تولید مدلهای سهبعدی (سهبعدی) محیط در زمینههای مختلف، بهعنوان مثال، نوسازی ساختمان [ 1 ]، ناوبری داخلی [ 2 ]، معماری [ 3 ]، و مدیریت تأسیسات [ 4 ، 5 ] مورد توجه قابل توجهی قرار گرفته است. . با در دسترس بودن فناوری بالغ برای جمعآوری دادهها، اطلاعات محیطی غنی را میتوان از طریق پلتفرمهای بسیاری مانند تشخیص نور و محدوده [ 6 ]، دوربینهای RGB-D [ 7 ] و دوربینهای استریو [ 8] بهدست آورد.]. متعاقبا، استخراج ساختار کارآمد و قوی بر اساس دادههای بهدستآمده به یک موضوع تحقیقاتی محبوب تبدیل شد. هدف از استخراج سازه های داخلی (ISE) به تصویر کشیدن ساختار برجسته و ارائه توصیفی قوی از چیدمان داخلی است. ISE دستی سنتی خسته کننده است و نیاز به مداخله دستی بیش از حد دارد. در مقایسه با استخراج ساختار از محیط بیرون [ 9 ، 10 ]، ISE از نظر سه جنبه چالش برانگیزتر است: (الف) مقدار بیشتری از درهم ریختگی، (ب) هندسه پیچیده تر، و (ج) بیشتر انسدادهای ناهموار توزیع شده
با توجه به نوع داده، روشهای ISE به طور کلی به دو دسته عمده طبقهبندی میشوند: (1) ISE بر اساس دادههای تصویری با استفاده از تصاویر قالببندی شده و حافظه دادههای کوچک، مشمول تغییرات روشنایی، که مطالعاتی بر اساس دادههای تصویری انجام شده است [11] . ، 12 ، 13 ] و (2) ISE بر اساس داده های ابر نقطه ای با استفاده از یک ابر نقطه ای ساختار نیافته، توپولوژی فضایی مطلوب و ردپای حافظه بزرگ، که مطالعاتی نیز برای آن انجام شده است [14 ، 15 ، 16 ، 17 ] . علاوه بر این، روش هایی برای ترکیب ابرهای تصویر و نقطه پیشنهاد شده است [ 18 ، 19 ، 20]]، و ویدئو مورد سوء استفاده قرار گرفته است [ 21 ، 22 ، 23 ].
علاوه بر این، شکل حاصل از ISE را می توان به سه نوع طبقه بندی کرد: نقشه ساختار ویژگی (FSM)، نقشه ساختار معنایی (SSM)، و نقشه ساختار ناوبری (NSM). یک FSM بر اساس یک یا چند نوع سازه داخلی ساخته می شود. ساختارهای داخلی محکم را می توان با دقت نشان داد. با این حال، انجمن های توپولوژیکی ویژگی ها در نظر گرفته نمی شوند. یک SSM با استفاده از یک ویژگی معنایی از یک صحنه داخلی تولید می شود. طرح اصلی داخلی یا ساختار اولیه را می توان بازسازی کرد. با این حال، توصیف دقیق برخی از ساختارها کافی نیست و برخی از ویژگی های معنایی برای مکان یابی و ناوبری ضروری نیستند. NSM عمدتاً برای تأکید بر تشخیص هدف مانع، روابط توپولوژیکی و مناطق قابل عبور در فضاهای داخلی استفاده می شود. با این حال، ساختار داخلی به شکل یکپارچه و معقول سازماندهی نشده است.
در اینجا، ما یک روش جدید ISE را بر اساس یک ابر نقطه پیشنهاد میکنیم. نتیجه ISE ما شامل یک FSM و یک NSM است. برای ساخت FSM، از یک الگوریتم تقسیمبندی صفحه دو مرحلهای جدید برای استخراج ویژگیهای مسطح (ابر نقطه مسطح اصلی) با یکپارچگی بهتر استفاده شد. پس از آن، درونی های مسطح با استفاده از یک الگوریتم تقسیم بندی مبتنی بر چهار درخت ساده شدند. در نهایت، دو استراتژی مثلث سازی در مرز و داخل برای بازسازی ساختار مسطح استفاده شد. برای ساخت NSM، ما از یک NSM جدید شامل یک نقشه منطقه قابل عبور (PAM) در ارتفاعات مختلف و ابر نقطه مسطح اصلی استفاده کردیم. علاوه بر این، NSM ما بر اساس فرضیه جهان منهتن ساخته شده است که به استاتیک شهر و صحنه های داخلی مربوط می شود. بیان میکند که یک صحنه داخلی بر روی یک شبکه دکارتی ساخته میشود که در آن موارد فوقالعاده در جهان با یکی از سه جهت غالب همسو میشوند. مشارکتهای اصلی ما چهار برابر است: (1) الگوریتم تقسیمبندی صفحه در حال رشد دو مرحلهای پیشنهادی یکپارچگی صفحه و استحکام FSM را بهبود میبخشد. (2) روش ساده سازی چهاردرختی می تواند حافظه داده را به میزان قابل توجهی کاهش دهد و استراتژی مثلث بندی پیشنهادی می تواند بر ارتباط بین مرز و ساختار داخلی تأکید کند. (3) برای ساخت NSM، روش ما می تواند زمین را به خوبی از ابرهای نقطه داخلی بدون محدودیت های قبلی اضافی بگیرد. (4) فرم جدید NSM پیشنهادی نه تنها میتواند یک منطقه قابل عبور برای برنامهریزی مسیر را نشان دهد، بلکه میتواند به عنوان یک نقشه ویژگی مرجع برای بهبود کارایی و استحکام ناوبری ربات داخلی عمل کند. (1) الگوریتم تقسیمبندی صفحه در حال رشد دو مرحلهای پیشنهادی یکپارچگی صفحه و استحکام FSM را بهبود میبخشد. (2) روش ساده سازی چهاردرختی می تواند حافظه داده را به میزان قابل توجهی کاهش دهد و استراتژی مثلث بندی پیشنهادی می تواند بر ارتباط بین مرز و ساختار داخلی تأکید کند. (3) برای ساخت NSM، روش ما می تواند زمین را به خوبی از ابرهای نقطه داخلی بدون محدودیت های قبلی اضافی بگیرد. (4) فرم جدید NSM پیشنهادی نه تنها میتواند یک منطقه قابل عبور برای برنامهریزی مسیر را نشان دهد، بلکه میتواند به عنوان یک نقشه ویژگی مرجع برای بهبود کارایی و استحکام ناوبری ربات داخلی عمل کند. (1) الگوریتم تقسیمبندی صفحه در حال رشد دو مرحلهای پیشنهادی یکپارچگی صفحه و استحکام FSM را بهبود میبخشد. (2) روش ساده سازی چهاردرختی می تواند حافظه داده را به میزان قابل توجهی کاهش دهد و استراتژی مثلث بندی پیشنهادی می تواند بر ارتباط بین مرز و ساختار داخلی تأکید کند. (3) برای ساخت NSM، روش ما می تواند زمین را به خوبی از ابرهای نقطه داخلی بدون محدودیت های قبلی اضافی بگیرد. (4) فرم جدید NSM پیشنهادی نه تنها میتواند یک منطقه قابل عبور برای برنامهریزی مسیر را نشان دهد، بلکه میتواند به عنوان یک نقشه ویژگی مرجع برای بهبود کارایی و استحکام ناوبری ربات داخلی عمل کند. (2) روش ساده سازی چهاردرختی می تواند حافظه داده را به میزان قابل توجهی کاهش دهد و استراتژی مثلث بندی پیشنهادی می تواند بر ارتباط بین مرز و ساختار داخلی تأکید کند. (3) برای ساخت NSM، روش ما می تواند زمین را به خوبی از ابرهای نقطه داخلی بدون محدودیت های قبلی اضافی بگیرد. (4) فرم جدید NSM پیشنهادی نه تنها میتواند یک منطقه قابل عبور برای برنامهریزی مسیر را نشان دهد، بلکه میتواند به عنوان یک نقشه ویژگی مرجع برای بهبود کارایی و استحکام ناوبری ربات داخلی عمل کند. (2) روش ساده سازی چهاردرختی می تواند حافظه داده را به میزان قابل توجهی کاهش دهد و استراتژی مثلث بندی پیشنهادی می تواند بر ارتباط بین مرز و ساختار داخلی تأکید کند. (3) برای ساخت NSM، روش ما می تواند زمین را به خوبی از ابرهای نقطه داخلی بدون محدودیت های قبلی اضافی بگیرد. (4) فرم جدید NSM پیشنهادی نه تنها میتواند یک منطقه قابل عبور برای برنامهریزی مسیر را نشان دهد، بلکه میتواند به عنوان یک نقشه ویژگی مرجع برای بهبود کارایی و استحکام ناوبری ربات داخلی عمل کند.
ادامه مقاله به شرح زیر تدوین شده است. مطالعات مرتبط در بخش 2 بررسی شده است . روش ISE ما به طور مفصل در بخش 3 معرفی شده است . جزئیات تجربی در بخش 4 ارائه شده است . نتایج تجربی در بخش 5 مورد بحث و تحلیل قرار گرفته است . نتیجه گیری در بخش 6 ارائه شده است .
2. مطالعات مرتبط
تا به امروز، چند مطالعه در مورد ISE بر اساس داده های ابر نقطه داخلی انجام شده است.
یک FSM برای شناسایی و مدلسازی اجزای ساختاری قابل مشاهده غالب یک محیط داخلی استفاده میشود. برخی از محققان بازسازی انواع ساختارهای خاص را بهینه کرده اند و اطلاعات اضافی را از بین برده اند. محققان دیگر به طور خودکار اجزای معماری را در برخی شرایط شدید بازیابی کردند، مانند مواردی که شامل انسداد و بسیاری از خوشهها است. برخی از محققان از روش مثلث بندی بر اساس ویژگی های استخراج شده برای بازسازی ساختار داخلی استفاده کردند. ما و همکاران [ 24] روشی را برای مثلث بندی و بافت بندی کارآمد سطوح مسطح در یک ابر نقطه بزرگ ارائه کرد. روش های مثلث بندی مبتنی بر نقطه و چند ضلعی برای به دست آوردن یک مثلث مسطح دقیق و قوی استفاده می شود. این فناوری شامل تقسیمبندی صفحه مبتنی بر اجماع نمونه تصادفی (RANSAC) است. ساختار صفحه شناسایی شده با استفاده از روش مبتنی بر چهار درخت از بین می رود. هر قطعه صفحه جدا شده به مرز و داخلی تقسیم می شود، مثلث بندی مبتنی بر نقطه بین مرز مرتب شده و نقاط داخلی انجام می شود، و مثلث سازی مبتنی بر چند ضلعی مستقیماً روی رئوس داخلی انجام می شود. در نهایت، بافتهای بخشهای صفحه با نمایش رنگهای رأس بخش مسطح متراکم بر روی یک بافت RGB دو بعدی (2 بعدی) تولید میشوند. Feichter و Hlavacs [ 25] ویژگی های مسطح را با استفاده از RANSAC استخراج کرد. متعاقباً، مرز هواپیما با استفاده از الگوریتم مرزی شکل آلفا شناسایی شد و هواپیما با مثلثسازی محدود Delaunay مثلثبندی شد. علاوه بر این، برخی از محققین از تبدیل Hough برای شناسایی سازه های مقاوم داخلی و بازسازی FSM های داخلی بر اساس ساختارهای استخراج شده، مانند سطوح دیوار استفاده کردند [ 26 ، 27 ]. روشهای دیگری برای بازسازی FSM داخلی پیشنهاد شدهاند، مانند روش جدید تقسیمبندی شکل مسطح درشت به ریز [ 28 ]، بهینهسازی برش نمودار [ 29 ]، استفاده از نظمهای موجود در نماها [ 30 ]، یک الگوریتم مبتنی بر صافی [ 31 ] و کنده کاری [ 32]. اخیراً، برخی از روشهای تقسیمبندی بدون نظارت برای استخراج ویژگی ارائه شدهاند، مانند رشد منطقه بر اساس پیوستگیهای هندسی [ 33 ]، تقسیمبندی معنایی مبتنی بر وکسل [ 34 ]، تقسیمبندی بیش از حد با استفاده از اتصال فضایی و ویژگیهای هندسی [ 35 ]، و رشد منطقه. بر اساس Octree [ 36 ].
ارمنی و همکاران [ 37 ] از پیشین های هندسی به دست آمده از تجزیه و ترکیب مجدد عناصر شناسایی شده برای به روز رسانی فضاهای کشف شده استفاده کرد. اوچمن و همکاران [ 38 ] یک مدل احتمالی برای تخمین تخصیص نرم به روز شده نقاط به برچسب های اتاق ساخت. کوادجو و همکاران [ 39 ] یک نمایش الگوی ماتریسی دو بعدی جدید از دیوارها را پیشنهاد کرد که عملیات، مانند طرح اتاق و تشخیص باز شدن در زمان چند جمله ای را تسهیل می کرد. یانگ و همکاران [ 40 ] سه نوع محدودیت ساختاری (محدودیت های معنایی، هندسی و توپولوژیکی) اجزای معماری را در نمایش صحنه تعریف کرد. شی و همکاران [ 41] از یک الگوریتم حداقل برش نمودار در خوشه های اتاق برای تشخیص اشیاء سطح دیوار استفاده کرد. وانگ و همکاران [ 42 ] یک روش ساخت مدلسازی مبتنی بر چارچوب خط معنایی جدید برای بهینهسازی ساختارهای خط شناسایی شده با استفاده از شبکههای متخاصم مولد شرطی پیشنهادی پیشنهاد کرد. Xiong و Huber [ 43 ] از یک مدل میدان تصادفی شرطی برای کشف اطلاعات زمینه ای برای کمک به ساخت یک مدل معنایی سه بعدی استفاده کردند. برخی از روشهای یادگیری ماشین برای یادگیری ویژگیهای منحصربهفرد انواع ساختارهای مختلف و ساختارهای برچسبگذاری پیشنهاد شدهاند [ 44 ، 45 ].
محققان ساخت نمودارهای ناوبری را بر اساس مدل های معین مبتنی بر معنایی پیشنهاد کرده اند [ 46 ، 47 ]. برخی از چارچوبهای تقسیم فضای انعطافپذیر (FSS) برای محاسبه محدودیتهای پیشرفته در طول ناوبری یا برای شناسایی فضاهای ناوبری داخلی ارائه شدهاند [ 48 ، 49 ]. زلاتانوا و همکاران [ 50 ] چارچوبی را ارائه کرد که به طور خاص بر تقسیمبندیهای فیزیکی و مفهومی فضاهای داخلی برای حمایت از محلیسازی داخلی تأکید داشت. تنجا و همکاران [ 51] الگوریتمهایی را برای تولید خودکار سه نوع مختلف مدل ناوبری، یعنی مدلهای ناوبری مبتنی بر خط مرکزی، مدلهای ناوبری مبتنی بر متریک و شبکه، برای تطبیق نقشه دادههای موقعیتیابی داخلی ارائه کرد. Flikweert و همکاران [ 52 ] یک نمودار ناوبری داخلی بر اساس ساختار IndoorGML ساخت، که در آن گرهها در فضاها، درها، شیبها و پلهها قرار میگرفتند و روابط اتصال بین آنها از یک گراف رابطه گره تعیین شد. بوگوسلاوسکی و همکاران [ 53 ] یک ساخت خودکار جدید از شبکه چگالی متغیر برای تعیین مسیرهای خروج در محیط های خطرناک پیشنهاد کرد. لی و همکاران [ 54] یک شبکه عمیق را طراحی کرد که PointNet را با میدان تصادفی مارکوف ترکیب می کند تا اشیاء منفرد را از ابر نقطه با دقت بیشتری برای ناوبری داخلی شناسایی کند. ناکاگاوا و نوزاکی [ 55 ] روشی را پیشنهاد کردند که شامل طبقه بندی اشیا، تخمین منطقه قابل کشتیرانی و تخمین مسیر قابل کشتیرانی برای ساخت یک مدل شبکه هندسی برای ناوبری داخلی بود. لیو و همکاران [ 56 ] یک مدل ناوبری فضایی داخلی برای پشتیبانی از مدلهای ناوبری و منطقی از پلانهای طبقه طراحی کرد. عبدالله و همکاران [ 57 ] یک مدل مفهومی IndoorGML پیشرفته (نمودار کلاس زبان مدلسازی یکپارچه (UML)) برای جلوگیری از سوء تفاهم پیشنهاد کرد. مدل مفهومی می تواند طبقات استاندارد را به طور موثرتری ترسیم کند. بر اساس مدل های بیوگرافی میلنر، والتون و همکاران. [ 58] بیگرافها را برای ارائه مشخصات جبری رسمی که به طور مستقل عامل و همچنین محل مکان (مثلاً سلسله مراتب ساختمان) و اتصال (مثلاً نمودارهای ناوبری مبتنی بر مسیر) را نشان می دهد طراحی کرد.
با این حال، برخی از مسائل در ISE بر اساس ابرهای نقطه وجود دارد: (1) برخی از روشهای ISE با استفاده از یادگیری ماشینی به مقدار زیادی از دادههای نمونه یادگیری متنوع نیاز دارند و در حال حاضر، دادههای برچسبگذاری ابر نقطه کمتر از تصویر است. عملکرد روش منوط به آموزش مدل خسته کننده است، که ممکن است کارایی ISE را به خطر بیندازد. (2) برخی از روشهای ISE تحت مداخله دستی قابل توجهی انجام میشوند و تحت تأثیر تنظیمات پارامتر غیرمنطقی قرار میگیرند. عملیات دستی بیش از حد و تنظیمات نامنظم پارامتر به طور قابل توجهی کاربرد الگوریتم را مختل می کند. (3) اگرچه ISE می تواند ساختار را با دقت بالا استخراج کند، اما یکپارچگی سازه تضمین نشده است. ساختار کامل برای ISE ضروری و مفید است.
روش ISE ما نیازی به ابر نقطه برچسب دار ندارد و نتیجه یک استخراج ترکیبی شامل FSM و NSM است. این روش میتواند نمایش مدل یک ساختار مسطح برجسته داخلی را به طور قوی کامل کند و میتواند یک منطقه قابل عبور داخلی را نشان دهد. علاوه بر این، می تواند به طور موثر ساختار مسطح برجسته را برای محلی سازی داخلی مدیریت کند. با توجه به برتری فرم نتیجه ترکیبی، نتیجه ISE ما می تواند در زمینه های بیشتری اعمال شود. از طریق مدیریت موثر پارامترها، کار دستی گسترده برای ساخت FSM مورد نیاز نیست. برای ساخت NSM، روش ما میتواند صفحه زمین را بدون محدودیتهای اضافی بهطور قوی ثبت کند.
3. روش
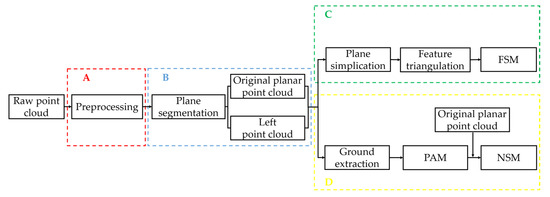
فلوچارت روش پیشنهادی ISE در شکل 1 نشان داده شده است . ورودی یک ابر نقطهای بدون ساختار متراکم خام است و خروجی شامل یک FSM و یک NSM است. خط لوله پردازش شامل چهار مرحله است:
-
پیش پردازش: داده های ابر نقطه خام برای حذف نقاط نامعتبر و نویز پردازش می شوند. پس از آن، حجم داده ها به طور قابل توجهی از طریق نمونه برداری کاهش می یابد.
-
تقسیمبندی صفحه: ساختار مسطح از طریق یک الگوریتم ترکیبی دو مرحلهای در حال رشد منطقه گرفته میشود. پس از آن، ابر نقطه پیش پردازش به ابرهای صفحه اصلی و ابرهای نقطه چپ طبقه بندی می شود.
-
ساخت FSM: پس از تقسیم بندی صفحه، هر ابر نقطه مسطح به درونی ها و مرزها طبقه بندی می شود. متعاقباً، استراتژیهای مثلثسازی متفاوتی در دو بخش اتخاذ میشوند. در نهایت، یک FSM (به عنوان مثال، یک مدل مش مسطح) بر اساس یک ساختار مسطح تولید می شود.
-
ساخت NSM: یک هواپیمای زمینی جدید بر اساس تجزیه و تحلیل ساختار داخلی تحت فرض جهان منهتن پیشنهاد شده است. در ادامه نقشه موانع در ارتفاعات مختلف و مناطق قابل عبور اولیه ساخته می شود. در نهایت، یک NSM جدید شامل یک ابر نقطه مسطح اصلی و یک PAM تولید میشود.
3.1. پیش پردازش
پیش پردازش شامل سه مرحله است: حذف نقطه نامعتبر، فیلتر آماری، و فیلتر وکسل. ابتدا، نوع داده نامعتبر، “NAN” در ابر نقطه خام حذف می شود و مآپمنبه دست آمده است. پس از آن، برخی از نقاط خطا و نویز ایجاد شده در حین اسکن یا دوخت از طریق فیلتر آماری با استفاده از معادله (1) حذف می شوند. مآپاسکسب شده است. در نهایت، فیلتر کردن وکسل با اندازه وکسل ( r∗r∗r) یک روش نمونه برداری پایین برای استفاده از حافظه داده ها انجام می شود. علاوه بر این، داده های ابر نقطه نمونه برداری مآپVحفظ می شود.
جایی که nآد(پتی)میانگین فاصله بین است پتیو nکهمسایه به داخل اشاره می کند مآپمن، εیک ضریب مقیاس است ( ε=3) و د¯میانگین فاصله همه نقاط و نقاط همسایه آنها در داخل است مآپمن.
3.2. تقسیمبندی صفحه دو مرحلهای در حال رشد
در صحنه های داخلی، ساختارهای مسطح تکه تکه بر دیگر ساختارهای سطحی غلبه می کنند. بنابراین، ساختار داخلی را بر اساس یک ویژگی مسطح بازسازی کردیم. دو رویکرد برجسته برای تقسیمبندی صفحه وجود دارد: برازش مدل و رشد منطقه. روش برازش مدل بر روی یک مدل ریاضی از پیش تعریف شده پیاده سازی شده است. دو مدل پرکاربرد عبارتند از اجماع نمونه تصادفی (RANSAC) [ 59 ] و تبدیل Hough [ 60]. در روش برازش مدل، توپولوژی فضایی را نمی توان در یک فضای سه بعدی در نظر گرفت. از این رو، ناپیوستگی ممکن است در ویژگی مسطح رخ دهد. روش رشد منطقه موجود به دقت محاسباتی شرایط رشد حساس است، که ممکن است یکپارچگی ویژگی مسطح را مختل کند. بنابراین، ما یک تقسیمبندی صفحه در حال رشد دو مرحلهای هیبریدی را برای مدیریت مؤثرتر جزئیات ساختار مرزی پیشنهاد کردیم. روش ما شامل رشد منطقه مبتنی بر نقطه (مرحله 1) و رشد منطقه مبتنی بر صفحه (مرحله 2) است.
3.2.1. در حال رشد منطقه مبتنی بر نقطه
در الگوریتم 1، رشد منطقه مبتنی بر نقطه نشان داده شده است. الگوریتم استفاده می کند مآپVبه عنوان ورودی و یک صفحه تقسیم شده اولیه تولید می کند پلآ. شرایط رشد، از جمله نیاز به زاویه نرمال و محدودیت فاصله نقطه به صفحه، اتخاذ شده است. در تجزیه و تحلیل رشد، نقاط همسایه با نرمال واجد شرایط در دانه های کاندید حفظ می شوند. در رابطه (2)، فاصله نقطه به صفحه بیشتر برای نقاطی با نرمال ناموفق محاسبه می شود. نقاطی با فاصله نقطه به صفحه کمتر از آستانه فاصله δ1در بخش مسطح در حال رشد حفظ خواهد شد اما نه برای بذرهای کاندید. ابر نقطه مآپVبه هواپیمای مقدماتی تقسیم می شود پلآو نکات باقی مانده آرپپس از رشد منطقه مبتنی بر نقطه.
جایی که پسنقطه پرس و جو است، ( nتی، دتی) پارامتر معادله صفحه است و nتیبرای هواپیما عادی است
| رشد منطقه مبتنی بر نقطه الگوریتم 1 (مرحله 1) |
| 1: ورودی: ابر نقطه مآپV {پتیمن| پتیمن ∈مآپV}، تابع همسایه یابی Ω(.)، آستانه زاویه |
| 2: θ1آستانه فاصله δ1. |
| 3: خروجی: ابر نقطه صفحه اولیه تقسیمبندی شده { پلآ} |
| 4: مقداردهی اولیه: سطح نقطه ابر برچسب مندپلآnه←0، نقطه همسایه ها {نبدمن} ←{∅}، نقاط عادی |
| 5: {نمترلمن}← {∅}, انحنای نقطه { رزومهمن} ←{∅}، برچسب منطقه {آرل} ←{ آرلمن | آرلمن= –1، من= 0،1… |
| 6: اندازه(مآپ)}، { نبدمن} ←Ω (پتیمن)، {نمترلمن}←PCA ( نبدمن) رزومهمن←EVD ( نبدمن)، ترتیب نقطه ای |
| 7: {پو}←نقاط را بر اساس انحنا به ترتیب صعودی مرتب کنید. |
| 8: دانه های کاندید {اسجآ}←{∅}، حداقل نقطه انحنا را وارد کنید {پo}به {اسجآ} |
| 9: اگر هنوز وجود دارد آرلمنبرابر با -1 است |
| 10: در حالی که {اسجآ}خالی نیست انجام دهید |
| 11: بذر فعلی سیس ←اولین عنصر در {اسجآ}، برداشتن سیساز جانب {اسجآ} |
| 12: برای idx ∈ {نبدمن} از سیس |
| 13: زاویه ←محاسبه زاویه بین {نمترلمن} از مندایکس و {نمترلمن} از سیس |
| 14: اگر زاویه < θ1 |
| 15: درج کنید idxبه {اسجآ}، آرلمندایکس←مندپلآnه |
| 16: پایان اگر |
| 17: دیگری |
| 18: دور ←محاسبه فاصله بین پتیمندایکسو هواپیمای محلی مناسب از سیس |
| 19: اگر دور <δ1 |
| 20: آرلمندایکس←مندپلآnه |
| 21: پایان اگر |
| 22: دیگری |
| 23: آرلمندایکس← -2 |
| 24: پایان دیگر |
| 25: پایان دیگر |
| 26: پایان برای |
| 27: پایان در حالی که |
| 28: مندپلآnه1 افزایش می یابد |
| 29: پایان اگر |
| 30: اگر آرلمن> -1 |
| 31: جمع آوری کنید پتیمنبه پلمنآمطابق با آرلمن |
| 32: پایان اگر |
جایی که PCA تجزیه و تحلیل مؤلفه اصلی است و EVD تجزیه ارزش ویژه است.
3.2.2. در حال رشد منطقه مبتنی بر هواپیما
پس از رشد منطقه مبتنی بر نقطه، برخی از نقاط صفحه، آرپمانند نقاط مرزی، به دلیل محدودیت شرایط رشد، طبقه بندی نشده باقی ماندند. رشد منطقه ای مبتنی بر هواپیما برای پردازش بیشتر نقاط صفحه طبقه بندی نشده اتخاذ شد.
- (1)
-
به روز رسانی نقطه باقی مانده
همانطور که در رابطه (3) نشان داده شده است، یک آستانه کمیت نقطه ای را اتخاذ کردیم ز1برای فیلتر کردن هواپیماهای کوچک پلتیمنو آنها را دوباره به داخل پراکنده کند آرپ. پس از آن، ابر نقطه باقیمانده به روز شده است آرپتوبه دست آمده است.
جایی که n(پلمنآ)مقدار نقطه ای ابر نقطه صفحه را نشان می دهد پلمنآ.
- (2)
-
در حال رشد هواپیما
نقاط همسایه نپمنببرای تمام نقاط پلمنآدر ایجاد شده اند آرپتو، و نکات تکراری در نپمنبحذف می شوند. یک فرآیند رشد مشابه مرحله 1 انجام شد نپمنبو آرپتو. با این حال، تنها شرایط رشد فاصله در نظر گرفته شد. در معادله (4) هر ابر نقطه صفحه پلمنبشامل امتیازهای طبقه بندی نشده واجد شرایط است پتیqتوآو هواپیمای مقدماتی مربوطه پلمنآپس از رشد منطقه مبتنی بر هواپیما.
جایی که د(پتی، پلمنآ)فاصله از نقطه است پتیخط بالا پلمنآ، δ2آستانه فاصله است و np( پلمنب) مقدار صفحه است پلمنآ.
ابرهای نقطه مسطح اصلی پلبو ابرهای نقطه باقی مانده را به روز کرد آرپتوپس از رشد منطقه مبتنی بر هواپیما به دست آمد. برخی از نتایج تقسیمبندی صفحه روش رشد منطقه دو مرحلهای پیشنهادی ما در شکل 2 نشان داده شده است . نقاط قرمز نشان دهنده نقاط طبقه بندی نشده باقی مانده است، در حالی که نقاط با رنگ های دیگر نشان دهنده سطوح مختلف هستند. همانطور که در شکل 2 نشان داده شده است ، چند نقطه قرمز طبقه بندی نشده در اطراف تقاطع دیوارهای زرد و خاکستری ظاهر شد. دو جنبه اصلی در مدیریت اطلاعات مرزی دخیل است: (1) در رشد منطقه مبتنی بر نقطه، نقاط اطراف مرز به صورت صفحه طبقهبندی میشوند، اما نه دانههای کاندید که بر اساس شرایط فاصله اعمال میشوند. این امر از توقف زودهنگام قبل از رسیدن به مجاورت مرز جلوگیری می کند. (2) در رشد منطقه مبتنی بر هواپیما، نقاط مرزی در آرپبیشتر بر اساس فاصله به هواپیماها طبقه بندی می شوند. این بیشتر باعث کاهش تعداد نقاط طبقه بندی نشده در اطراف مرز می شود.
3.3. ساده سازی صفحه
اگرچه اکثر سازههای مسطح با استفاده از روش تقسیمبندی صفحه ما گرفته شدهاند، اما افزونگی قابلتوجهی هنوز وجود دارد. ما یک تقسیمبندی چهاردرختی بر اساس همجوشی خوشهای برای سادهسازی ویژگی مسطح اتخاذ کردیم. مزیت این روش این است که تصویر را می توان به طور موثر به مناطق خوشه بندی منظم و مربع تقسیم کرد. خط لوله ساده سازی صفحه در شکل 3 نشان داده شده است . در الگوریتم، استراتژی های مختلفی در مرز و داخل هواپیما اتخاذ شد. نقاط مرزی برای تضمین توزیع کلی ساختار مسطح حفظ شدند. برخی نقاط جدید در فضای داخلی برای بازسازی ویژگی های ساختار مسطح ایجاد شد.
3.3.1. طرح املایی
برای هر ابر نقطه صفحه استخراج شده پلمنب، هواپیما عادی است نoمن(ωایکس،ωy،ωz)بر اساس حداقل مربع برآورد شد. ماتریس چرخش آرoتیدر رابطه (5) به دست آمد. سپس، ابر نقطه مسطح اصلاح شده جهت پلمندجبا چرخش به دست آمد پلمنببا آرoتی. پس از آن، ما ابر نقطه پیش بینی شده را به دست آوردیم پلمنپrدر معادله (6).
جایی که θزاویه بین است نoمنو ز(0، 0، 1).
3.3.2. تولید تصویر
ابر نقطه مرزی بداز پلمنپrبا استفاده از روش مرزی شکل آلفا [ 61 ] استخراج شد. در ادامه با استفاده از رابطه (7) نقشه برداری کردیم پلمنپrبه یک تصویر خاکستری منgمنبا استفاده از تابع Λ. بعد، ارتفاع و عرض را تنظیم می کنیم منgمندر معادله (8) معادل باشد تا برای تقسیم بندی بعدی آماده شود.
که در آن x و y مختصات X و Y هر نقطه در آن هستند پلمنپr، به ترتیب؛ rو جسطر و ستون هر پیکسل در است منg، به ترتیب؛ rهسوضوح پیکسل تصویر است. بrwو بrساعتعرض و ارتفاع حداقل مستطیل مرزی هستند پلمنپr، به ترتیب؛ و wو ساعتعرض و ارتفاع هستند منg، به ترتیب.
3.3.3. تقسیم بندی چهار درختی
پیکسل ها در منgمنبه بیرونی طبقه بندی می شوند ( Eپ)، مرز ( بپو داخلی ( منپ). در شکل 4 ، اصل تقسیم بندی چهاردرخت نشان داده شده است، که در آن منgمنهر بار به چهار منطقه مربع تقسیم می شود. فرآیند تقسیم بندی پایان نمی یابد تا زمانی که همه عناصر در هر منطقه پارتیشن بندی شده یکسان باشند. متعاقباً، همه بپو مربع های داخلی ( منس) که حاوی منپحفظ می شوند. چهار گوشه در بپو منسبه ابرهای نقطه ای تبدیل می شوند بپپمناسو منسپمناساز طریق عملکرد Λ–. در نهایت برای هر کدام پلمنب، یک ابر نقطه صفحه ساده شده پلمنسشامل بپپمناسو منسپمناسبه دست آمده است.
ابر نقطه مسطح ساده شده در شکل 5 نشان داده شده است . نتیجه ( شکل 5 ب) نقاط مرزی را به دقت نشان می دهد. همانطور که در شکل 5 ج نشان داده شده است، مقادیر مقیاس خاکستری برای Eپ، بپ، و منپکه در منgمنبرای تمایز به ترتیب روی 0، 100 و 240 تنظیم شدند. برای نتیجه ساده شده مسطح ( شکل 5 د)، طرح کلی قطعات مسطح حفظ شد و نقاط اضافی داخلی حذف شدند.
3.4. ویژگی مثلث سازی
پس از ساده سازی مسطح، ما نمایش مدل ویژگی مسطح را با استفاده از استراتژی های مثلث بندی مختلف در داخل و مرز هر یک بازسازی کردیم. پلمنس. در فضای داخلی، یک مثلث ساده انجام شد که در آن دو مثلث مستقیماً بر اساس چهار گوشه ایجاد شد. منسپمناس. در مرز، یک مثلث تخصیص راس ( شکل 6 ) انجام شد و چهار قانون برای فرآیند مثلث بندی پیشنهاد شد.
3.4.1. تعیین مرز
استفاده از مثلث مرزی پیشنهادی بپپمناسو منسپمناسبه عنوان ورودی و مثلث بندی ویژگی را تولید می کند. شکل 7 قانون فاصله پیشنهادی ما را نشان می دهد. شکل 7 a دو نوع موقعیت نسبی بین نقاط و لبه ها و همچنین قانون فاصله پیشنهادی برای محاسبه فاصله از یک نقطه تا یک لبه را نشان می دهد. شکل 7 ب محاسبه فواصل از بپپj( بپپj ∈ بپپمناس) تا چهار لبه در منسپک(منسپک ∈منسپمناس). همتر، یعنی لبه با حداقل فاصله تا بپپj، تعیین شد و حداقل فاصله مربوطه به عنوان فاصله از در نظر گرفته شد بپپjبه منسپک. متعاقبا، بپپjبه مجموعه نقاط جمع آوری شده طبقه بندی شد پساز همتر. در شکل 7 ب، د1حداقل فاصله و ه1هست همتر. در نهایت، پسبرای تمام لبه های منسپکبه دست آمد.
3.4.2. مرتب سازی مرزی
برای غیر خالی پسدر یک لبه، نقطه طرح ϑپتیاز بپپjدر لبه مربوطه محاسبه شد. شکل 8 مرتب سازی پیشنهادی برای مرتب سازی نقاط مرزی در هر یک را نشان می دهد پس. قانون مرتب سازی بر اساس مختصات بود ϑپتی. مختصات x یا y برای مرتب کردن نقاط مرزی بر اساس جهت لبه استفاده شد. Y و X به ترتیب برای جهت عمودی و افقی انتخاب شدند.
3.4.3. اتصال مثلثی
پس از مرتبسازی مرزی، یک قانون اتصال برای ساختن مثلث به طور مقدماتی، همانطور که در شکل 9 نشان داده شده است، پیشنهاد کردیم . برای هر غیر خالی پسنقطه روی یک لبه، مثلث ها را از طریق دو نقطه مرزی همسایه به هم وصل کردیم. چهار نوع اتصال مثلثی بر اساس موقعیت نسبی بین لبه و دو نقطه همسایه خلاصه شد. در شکل 9 ، پتی1و پتی2نشان دهنده دو بپپنکته ها. نوع 1 ( شکل 9 الف) شامل دو نقطه خارج از یک طرف لبه است. نوع 2 ( شکل 9 ب) شامل یک نقطه در داخل لبه و نقطه دیگر خارج از لبه است. نوع 3 ( شکل 9 ج) شامل دو نقطه در داخل لبه است. و نوع 4 ( شکل 9 د) شامل دو نقطه خارج از دو طرف مختلف لبه است. در نوع 4، یک نقطه میانی بین دو نقطه مرزی برای کمک به اتصال مثلث ها ایجاد می شود.
3.4.4. تنظیم مثلث
پس از اتصال مثلث مقدماتی، برخی از مثلث های غیرمنطقی که با مربع های دیگر تلاقی می کنند باید اصلاح شوند. بنابراین، یک قانون تنظیم برای اصلاح مثلث های نامناسب، همانطور که در شکل 10 نشان داده شده است، پیشنهاد شد . شکل 10 a مثلث ( ل1، ل2، ه4) تقاطع با مربع اس2. شکل 10 ب مثلث اصلی را نشان می دهد که به صورت زیر اصلاح شده است: اول، لبه تقاطع ل1، مربع تقاطع اس2، و لبه ای که به آن تعلق داشت ( ه4) مشخص شدند. پس از آن، نقطه طرح ریزی ϑپتیبر ه4محاسبه شد. در نهایت، نزدیکترین راس به ϑپتیکه در اس2انتخاب شد و یک مثلث جدید ( ل1، ل3، ل4) برای جایگزینی مثلث ( ل1، ل2، ه4).
مثلث بندی ویژگی ابر نقطه مسطح در شکل 11 نشان داده شده است . در شکل 11 الف، هر ببپبه لبه خاصی از منسپ، و رابطه بین مرز و داخل در هواپیما برای هر یک تقویت می شود پلمنس. نتیجه به صورت بصری طرح کلی ویژگی مسطح را حفظ می کند. مثلث سازی داخلی با استفاده از گوشه مربع ساده شده به طور قابل توجهی تعداد مثلث ها را کاهش داد. متعاقبا، ما یک FSM مثلثی در تمام ابرهای نقطه مسطح استخراج شده ساختیم پلب. FSM ما به شکل مش در شکل 11 b-d نشان داده شده است.
3.5. NSM
در مسیریابی ربات، یک نقشه ناوبری مناسب ضروری و مطلوب است. NSM ما شامل یک ابر نقطه مسطح اصلی است پلبو یک PAM. در مقایسه با NSM موجود، موانع و ناحیه قابل عبور در NSM ما با استفاده از نقاط با کاهش ابعاد مختصات نشان داده میشوند و اطلاعات سه بعدی پیچیده نادیده گرفته میشوند. علاوه بر این، NSM ما یکپارچه می شود پلب، ساختاری با ویژگی یکپارچه. استخراج شده پلبمی تواند به عنوان یک نقشه مرجع ویژگی در یک مکان داخلی بر اساس یک ابر نقطه در نظر گرفته شود. PAM ساخته شده می تواند به عنوان ناوبری داخلی و برنامه ریزی مسیر عمل کند. همانطور که در شکل 12 نشان داده شده است ، نمودار جریان ساختار NSM شامل استخراج زمین و ساخت نقشه است. روش استفاده می کند آرپتوو پلببه عنوان ورودی و یک NSM هیبریدی تولید می کند.
3.5.1. استخراج زمین
خط لوله پردازش PAM در شکل 13 نشان داده شده است . ورودی شامل پلبو آرپتو. در صحنه های داخلی، مفروضات معمولی شامل سازه های دائمی مسطح تکه تکه و صحنه های جهان منهتن در سه جهت متعامد است: دو جهت برای دیوارها و یکی برای کف و سقف [31 ] . خط لوله استخراج زمینی شامل مراحل زیر بود.
- (1)
-
گروه بندی و ادغام هواپیما
پلببر اساس جهت نرمال به صفحه گروه بندی شد و بر اساس فاصله بیان شده در رابطه (9) ادغام شد. سه گروه هواپیمای غالب grپمن(من=0، 1، 2)بر اساس کمیت هواپیما انتخاب شدند. علاوه بر این، جهت دمنrمناز grپمنبا استفاده از رابطه (10) تعیین شد.
جایی که ک1و ک2دو ضریب وزنی 0.5 تنظیم شده است، grپjمنصفحه j در گروه صفحه i است ،nrلبرای هواپیما عادی است grپjمن، nپ(grپjمن)مقدار نقطه ای است grپjمن، و n(grپمن)مقدار هواپیما است grپمن.
- (2)
-
تصحیح جهت
در رابطه (11)، گروه صفحه حاوی زمین، grپg، با استفاده از ناحیه طرح ریزی شناسایی شد. ماتریس تصحیح با به دست آمد دمنrg، که جهت آن است grپg، با استفاده از رابطه (5). ابر نقطه اصلاح شده مآپسیبا چرخش به دست آمد مآپV. متعاقبا، محدوده z ( zمترمنn، zمترآایکس) از مآپسیمحاسبه شد.
جایی که پآ(grپjمن)تابعی برای محاسبه مساحت طرح j امین صفحه استgrپمن، منطقه طرح ریزی با استفاده از مساحت حداقل مستطیل مرزی ابر نقطه طرح تقریبی می شود، آrهآمنحداکثر مساحت طرح ریزی هواپیماها در داخل است grپمن، و nپ(grپمن)کمیت صفحه در گروه صفحه i است.
- (3)
-
محاسبه شاخص
در معادله (12)، دو محدوده z (zمترمنnد، zمترمنnتو)و (zمترآایکسد، zمترآایکستو)با استفاده از پارامتر مقیاس تعیین شد κو محدوده z ( zمترمنn، zمترآایکس). دو مجموعه هواپیما، سهتی1و سهتی2، که مختصات z در آن بود (zمترمنnد، zمترمنnتو)و (zمترآایکسد، zمترآایکستو)به ترتیب از بین انتخاب شدند grپg. متعاقبا، پل1جو پل2جدو هواپیمای کاندید با حداکثر مساحت، از آن استخراج شد سهتی1و سهتی2، به ترتیب. شاخص های زمین و سقف با استفاده از رابطه (13) به دست آمد. آنها شامل سه حالت (0، 1، 2) بودند، که در آن (الف) حالت 0 نشان می دهد که نه پایه و نه سقف نامزد تشخیص داده نمی شود، (ب) حالت 1 به این معنی است که فقط یک نوع در سقف کاندید و پایه نامزد شناسایی می شود، و (ج) حالت 2 به این معنی است که هم سقف و هم زمین کاندید شناسایی می شوند. در حالت های 0 و 1، هواپیمای با حداکثر مساحت در grپgمستقیماً به عنوان زمین شناخته می شود زیرا ما فرض می کنیم که سقف در این مورد وجود ندارد و زمین مهم ترین صفحه است. در حالت 2، دو هواپیمای کاندید انتخاب شده را می توان به عنوان زمین و سقف در نظر گرفت. از آنجایی که هم زمین و هم سقف در داده ها وجود دارند، اشیاء در صحنه نسبت به سقف به زمین نزدیکتر هستند. علاوه بر این، پلکج( k = 1, 2) که به مرکز هندسی نزدیکتر است آرپتوبه عنوان زمین شناسایی می شود. در نهایت، نتایج استخراج سطح زمین در شکل 14 نشان داده شده است .
جایی که zمنپمیانگین مختصات z صفحه i در استgrپg، و i و j به ترتیب صفحه های i و j هستندgrپg.
3.5.2. ساخت نقشه
- (1)
-
ساخت و ساز منطقه گذر اولیه
مآپVپس از استخراج زمین به یک سطح زمین و موانع فضایی جدا شد. آنها با تراز کردن زمین با صفحه XOY تصحیح شدند و زمین اصلاح شده جهت در شکل 15 الف نشان داده شده است. همانطور که در شکل 15 ب نشان داده شده است، خوشه بندی اقلیدسی برای حذف نقاط بی اهمیت در موانع فضایی اتخاذ شد. همه مناطق زمانی که هیچ جسمی بالای زمین نبود قابل عبور بود. سوراخ های روی زمین با پر کردن کانتور در تصویر پر شد. همانطور که در شکل 15 c نشان داده شده است، یک تصویر باینری منgrدبر اساس زمین بر اساس عملکرد تولید شد Λدر معادله (7). همانطور که در شکل 15 d نشان داده شده است، خطوط زمین استخراج و پر شده و سپس منطقه قابل عبور اولیه در قالب تصویر ساخته شده است.
- (2)
-
ساخت و ساز PAM
از آنجایی که حجم ربات داخلی متفاوت بود، نقشه های موانع در ارتفاعات مختلف ساخته شد. چندین نقشه موانع منoبjبا ارتفاع های مختلف در قالب تصویر تولید شد. متعاقبا، منپآسسPAM در قالب تصویر، در ارتفاعات مختلف بر اساس رابطه (14) ساخته شد. سپس یک PAM در قالب ابر نقطه ای با استفاده از آن تولید شد Λ–.
ما یک PAM برای پنج محدوده ارتفاع (0-0.4، 0-0.8، 0-1.2، 0-1.6، و 0-2.0) ساختیم. نقشه ای با دامنه ارتفاع (0-1.2) در شکل 16 نشان داده شده است . مناطق مختلف با رنگ های مختلف نشان داده شده اند (سبز و قرمز به ترتیب نشان دهنده مناطق قابل عبور و مانع هستند). PAM می تواند موقعیت اشیا را به صورت بصری به تصویر بکشد.
- (3).
-
ساخت NSM
NSM شامل ابر نقطه مسطح اصلی است که در بخش 3.2 و PAM ارائه شده در بخش 3.5 توضیح داده شده است . در مسیریابی ربات، ما معمولاً یک نقشه مرجع ویژگی های جهانی را از قبل می سازیم. متعاقباً، ویژگیهای جمعآوریشده در زمان واقعی برای مطابقت با ویژگیهای استخراجشده در نقشه مرجع ویژگیهای جهانی برای انجام ناوبری مورد سوء استفاده قرار میگیرند. در مطالعه ما، ویژگی استخراج شده یک ساختار مسطح است. PAM می تواند برای نشان دادن منطقه قابل عبور برای برنامه ریزی مسیر استفاده شود.
4. آزمایش کنید
4.1. پلت فرم و توضیحات داده ها
همانطور که در شکل 17 نشان داده شده است ، از دو نوع مجموعه داده در آزمایش ما استفاده شد. دو مجموعه داده شبیه سازی ( شکل 17 a,b) برای ارزیابی عملکرد روش تقسیم بندی صفحه دو مرحله ای پیشنهادی ما استفاده شد. چهار مجموعه داده واقعی ( شکل 17 c-f) در آزمون روش ISE ما استفاده شد. ما مجموعه داده های واقعی 1-3 را از پارک و همکاران به دست آوردیم. [ 62]، در حالی که ما مجموعه داده واقعی 4 را با استفاده از اسکنر Faro جمع آوری کردیم. هر چهار مجموعه داده واقعی در فضای داخلی متصل جمعآوری شدند زیرا روش ما برای نمایش ساختار داخلی در نظر گرفته شده بود، نه پارتیشن فضا. مجموعه داده واقعی 1 مجموعه داده اتاق هیئت مدیره شامل یک فضای کنفرانس و فضای استراحت بود. پر از صندلی های به هم ریخته، کمدها و سازه های دیواری بود. مجموعه داده واقعی 2 مجموعه داده آپارتمانی شامل اتاق های بیشتری بود و مجموعه داده واقعی 3 مجموعه داده اتاق خواب با فضای نسبتاً کوچک بود. مجموعه داده واقعی 4 یک مجموعه داده اتاق نمایشگاه منظم با ساختارهای مسطح عالی بود. مجموعه داده های واقعی 1-3 شامل زمین است اما نه سقف. با این حال، هر دو ساختار در مجموعه داده واقعی 4 وجود داشتند. یک لپتاپ با CPU Intel Core i7-5500U @2.40 GHz/2.39 GHz و 8.0 گیگابایت RAM در آزمایش ما استفاده شد.
4.2. تنظیم پارامتر
تنظیمات پارامتر برای روش ISE ما در جدول 1 نشان داده شده است . پارامترها بر اساس مراحل روش ما طبقه بندی شدند. الف) در پیش پردازش، nک1و rبه طور تجربی بر اساس چگالی ابر نقطه ای برای پردازش ابر نقطه خام تعیین شدند. (ب) در ساخت و ساز FSM، پارامترها برای بهبود دقت ساختار استخراج شده و حفظ جزئیات ساختاری FSM تنظیم شدند. شکل 18 برخی از پارامترهای مورد استفاده را با جزئیات نشان می دهد. δ1و δ2به ترتیب با استفاده از معادلات (15) و (16) تقریب شدند. (ج) در ساخت NSM، پارامترهای مورد استفاده عمدتاً برای استخراج زمین و ساخت PAM بودند. تنظیم پارامتر در روش ما دو مزیت را ارائه می دهد: (1) برای ابرهای نقطه متراکم داخلی معمولی قابل استفاده است و مستقل از مقیاس صحنه است، و (2) تغییرات کوچک در پارامترها به طور قابل توجهی بر نتیجه آزمایشی کلی تأثیر نمی گذارد.
4.3. نتایج تجربی
نتایج تجربی چهار مجموعه داده واقعی در این بخش نشان داده شده است. نتایج روش ISE پیشنهادی ما شامل یک FSM و یک NSM بود. FSM یک مدل مش بود که از یک ویژگی صفحه تولید شد. NSM شامل یک PAM و ابر نقطه مسطح اصلی است که در آن PAM عمدتاً به عنوان نشانه مانع و برنامه ریزی مسیر عمل می کند، در حالی که ابر نقطه ویژگی مسطح اولیه مرجع محلی سازی در نظر گرفته می شود. علاوه بر این، PAM ما در دو فرمت نمایش داده شد: ابر نقطه و تصویر باینری. برخی از آمارهای کمی از نتایج در جدول 2 فهرست شده است .
4.3.1. مجموعه داده واقعی 1
مجموعه داده واقعی 1 یک مجموعه داده اتاق هیئت با فضای اتصال نسبتاً بزرگ و برخی از اشیاء خوشهبندی شده بود. این شامل برخی از ویژگی های برجسته هواپیما مانند زمین، میز کنفرانس، دیوار و کمد بود. در مجموع 142055 وصله در FSM ساخته شد ( شکل 19 a). ابر نقطه مسطح اولیه ( شکل 19 ب) حاوی 563 صفحه بود. PAM ساخته شده در شکل 19 ج نشان داده شده است. NSM ما از ابر نقطه مسطح اولیه و PAM تشکیل شده بود. یک فرم نمایش مشابه برای NSM مجموعه داده های واقعی 2-4 در شکل 20 ، شکل 21 نشان داده شده است. و شکل 22 نشان داده شده است.، به ترتیب. PAM بین دامنه های قد 1 و 2 به طور قابل توجهی متفاوت بود، و تغییر در بین PAM های 2-5 ناچیز بود. PAM ساخته شده از نظر بصری با چیدمان داخلی مطابقت داشت.
4.3.2. مجموعه داده واقعی 2
مجموعه داده واقعی 2 مجموعه داده آپارتمانی شامل چهار فضای اتاق متصل و ساختارهای دیواری فراوان بود. در مقایسه با مجموعه داده واقعی 1، ساختار دیوار غالب تر بود. در مجموع 130924 وصله در FSM ساخته شد ( شکل 20 a). ابر نقطه مسطح اولیه ( شکل 20 ب) شامل 384 صفحه بود. اگرچه تعداد هواپیماهای استخراج شده کم بود، اما آن هواپیماها دارای مساحت بیشتر و یکپارچگی بالاتر بودند. همانطور که در شکل 20 ج نشان داده شده است، با افزایش دامنه ارتفاع، تخت به عنوان یک مانع در PAM ظاهر شد .
4.3.3. مجموعه داده واقعی 3
مجموعه داده 3 مجموعه داده اتاق خواب با منطقه کوچک با یک فضای اتاق متصل بود. بیشتر ویژگی های هواپیما بخش های مسطح کوچکی از زمین، دیوار، کمد لباس و تخت بودند. FSM ( شکل 21 الف) شامل 94627 وصله بود. ابر نقطه مسطح اولیه ( شکل 21 ب) شامل 339 صفحه بود. برای تطبیق با هدف اتاق خواب، موانع کمی وجود داشت و PAM ساخته شده ( شکل 21 ج) تفاوت قابل توجهی نداشت.
4.3.4. مجموعه داده واقعی 4
مجموعه داده 4 مجموعه داده اتاق مطالعه بود که با استفاده از اسکنر فارو جمع آوری کردیم. مجموعه داده ادغام شده حاوی نقاط متراکم بود، و ویژگیهای صفحه برجسته مشابه ویژگیهای مجموعه داده واقعی 1 بود. واضحترین تفاوت بین این مجموعه داده و مجموعه دادههای واقعی 1-3 این بود که اولی دارای سقف بزرگی بود. مدل مش ساخته شده ( شکل 22 الف) شامل 127563 وصله بود. ابر نقطه مسطح اولیه ( شکل 22 ب) شامل 377 صفحه بود. همانطور که در شکل 22 ج نشان داده شده است، دو مانع مهم در PAM میز کنفرانس و غرفه نمایشگاه بودند.
5. بحث
5.1. عملکرد بخش بندی صفحه
همانطور که در شکل 23 نشان داده شده است، هر دو مجموعه داده های شبیه سازی و واقعی برای مقایسه عملکرد تقسیم بندی صفحه بین الگوریتم رشد منطقه دو مرحله ای پیشنهادی و الگوریتم رشد منطقه سنتی (TRG) استفاده شدند. دو مجموعه داده شبیه سازی ( شکل 17 a,b) برای ارزیابی کمی استفاده شد. مجموعه داده شبیه سازی 1 یک مکعب با وضوح نقطه 0.01 متر و 90000 نقطه در هر سطح بود. مجموعه داده های شبیه سازی 2 یک منشور مثلثی با وضوح نقطه 0.02 متر بود که هر مستطیل و مثلث به ترتیب شامل 60000 و 17421 نقطه بودند. بخشی از مجموعه داده واقعی 1 برای مقایسه نتایج به صورت بصری استفاده شد.
همانطور که در شکل 23 نشان داده شده است ، برخی از نقاط قرمز طبقه بندی نشده در نزدیکی مرز یا تقاطع صفحات در نتایج TRG ظاهر شدند. با این حال، تعداد نقاط طبقه بندی نشده به صورت بصری در نتایج به دست آمده با استفاده از روش ما کاهش یافت. علاوه بر این، برخی از ساختارهای مقعر و محدب روی دیوار (مستطیل سبز در شکل 23 د) در TRG شناسایی نشدند اما با استفاده از روش ما با موفقیت ضبط شدند.
فراخوانی نتیجه صفحه استخراج شده با استفاده از رابطه (17) برآورد شد. عملکرد کمی تقسیم بندی صفحه برای دو مجموعه داده شبیه سازی در جدول 3 نشان داده شده است . یکپارچگی همه صفحات افزایش یافت و میانگین یکپارچگی مسطح دو مجموعه داده شبیهسازی در روش ما بیشتر از موارد موجود در TRG بود، یعنی تقریباً 4٪ برای مربع و 6٪ برای منشور مثلثی.
جایی که پoمنnتیسrهجonنقاط صفحه استخراج شده و پoمنnتیستیrتوهنقاط صفحه واقعی هستند.
5.2. عملکرد مثلثی
FSM ساخته شده با آن به دست آمده با استفاده از مثلث طرح ریزی حریص سنتی (GPT) برای ارزیابی بیشتر مقایسه شد. در معادلات (18)-(20)، سه معیار آماری، مقدار میانگین مساحت ( مهآn, انحراف استاندارد ناحیه ( استیدهv، و محدوده مساحت ( آرآngه) برای تکههای موجود در مدل مش، برای تحلیل عملکرد الگوریتم انتخاب شدند. این ویژگی های هندسی شامل روند غلظت منطقه ( مهآn)، شدت تغییرات ناحیه ( استیدهv، و محدوده تغییرات منطقه ( آرآngه) از تکه های مثلثی در FSM. دادههای فضای داخلی با حجم زیاد با دادههای ابر نقطه زمینی هوابرد متفاوت بود. حاوی مقدار زیادی سطوح مصنوعی بزرگ مانند دیوارها، استوانه ها و سطوح مرتبط بود. با این حال، چند مانع کوچک برای بومی سازی ربات وجود داشت. بنابراین، مهآnسطح مثلثی نسبتا بزرگتر و به طور قابل توجهی بیشتر بود، استیدهvو آرآngهبزرگتر بودند سه معیار آماری برای یک ISE عالی بر اساس ابر نقطه باید نسبتاً بزرگ باشد، و آنها می توانند ویژگی های هندسی را برای FSM ساخته شده در مقایسه با نسبت کاهش داده سنتی [25 ] کمیت کنند.
علاوه بر این، مقدار تکه های مثلثی ( ستوآnتیمنتیy) در ارزیابی استفاده شد. مقایسه چهار آمار در شکل 24 نشان داده شده است . همانطور که نشان داده شده است، مهآn، استیدهv، و آرآngهروش ما به طور قابل توجهی بالاتر بود، در حالی که ستوآnتیمنتیyروش ما کمتر از GPT بود. FSM ما تلاش کرد تا اطلاعات کلی را که توزیع ساختار را توصیف میکند، ضبط کند و برخی از اطلاعات ویژگی اضافی را نادیده گرفت. از این رو، استفاده از چند تکه بزرگ در داخل صفحه و تکه های کوچک بزرگ در اطراف مرز نه تنها می تواند حافظه داده ها را کاهش دهد بلکه جزئیات ساختار را نیز تضمین می کند.
که در آن N تعداد وصله های مثلثی در FSM است. fمنi امین پچ مثلثی است .آr(fمن)مساحت است fمن; و آr(fمن)مترآایکسو آr(fمن)مترمنnحداکثر و حداقل مناطق هستند fمنبه ترتیب.
در مقایسه با GPT سنتی، روش ما مرز را بهتر پردازش کرد، یکپارچگی ساختار مسطح را بهبود بخشید، و یادآوری بخشبندی ویژگی را افزایش داد. از آنجایی که روش ما میتواند با موفقیت جزئیات ساختار صحنه را ثبت کند، ISE قویتر بود و ظاهر FSM ظریفتر بود.
6. نتیجه گیری
در اینجا، ما یک روش ISE جدید مبتنی بر یک ابر نقطهای متراکم بدون ساختار را پیشنهاد کردیم که میتواند به طور خودکار یک FSM را بر اساس یک ساختار مسطح بازسازی کند، که منجر به یک FSM قوی و نفیس میشود. در مقایسه با روش TRG، روش رشد منطقه دو مرحلهای ما یکپارچگی بالاتری از هواپیماها را نشان داد. اتوماسیون فرآیند از طریق یک تنظیم پارامتر منطقی بهبود یافت. تقسیم بندی چهاردرخت بر اساس همجوشی خوشه ای باعث کاهش افزونگی شد. مثلث بندی تخصیص راس پیشنهادی اطلاعات ساختار فشرده را در اطراف مرز صفحه در مقایسه با GPT حفظ کرد. مش تولید شده را می توان روی CAD یا نرم افزارهای دیگر اعمال کرد. مش ساخته شده چندین عملکرد را ارائه می دهد: (1) بازسازی فضای داخلی – برای برخی از صحنه های پیچیده داخلی، ساختارهای داخلی باید تجزیه و تحلیل شوند. (2) تعمیرات سازهای – نمایش ویژگی مرزی سازه را تقویت میکند و میتواند به عنوان یک مدل اولیه برای تعمیر اولیه سازههای داخلی عمل کند. و (3) کاهش حافظه داده – با استفاده از روش تقسیم بندی چهار درخت، ساختار ابر نقطه صفحه را می توان با حافظه داده کمتر نشان داد. روش ISE ما می تواند به طور خودکار یک شکل جدید از NSM را بازسازی کند که شامل ابر نقطه مسطح اصلی و یک PAM است. این می تواند زمین را به طور موثر در یک صحنه داخلی خوشه ای شناسایی کند و تابع مختصات اسکن نیست، به عنوان مثال، صفحه XOY در سیستم مختصات نیازی به افقی ندارد. در PAM، مکان موانع در ارتفاعات مختلف با استفاده از نقاط پس از کاهش ابعاد مختصات نشان داده شد. علاوه بر این،
در این مطالعه، ما چند چالش را در صحنه های داخلی واقعی کشف کردیم: (1) روش ما بر اساس یک ابر نقطه متراکم جمع آوری شده با استفاده از یک اسکنر سه بعدی یا تراز از طریق چندین اسکن انجام شد. روش ما ممکن است منوط به دقت دادههای اسکن اصلی باشد. (2) نتیجه NSM می تواند به عنوان یک نقشه ویژگی مرجع عمل کند و کارایی فرآیند ساخت و ساز قبل از ناوبری ربات زمان واقعی بهبود یابد. (3) اشیاء متحرک در فضاهای داخلی باید در نظر گرفته شود. و (4) ناوبری ممکن است برای فضاهای بزرگتر با اتاق ها و راهروهای بیشتر اعمال شود.
در مطالعات آینده، چندین موضوع باید مورد توجه قرار گیرد، به شرح زیر: (1) روش ISE ما فقط از ساختار صفحه برای ساخت FSM استفاده می کند. با این حال، انواع بسیاری از ساختارها در صحنه های داخلی وجود دارد. بنابراین، یک FSM بر اساس انواع بیشتری از ساختارها باید بررسی شود. (2) ما باید NSM خود را برای ناوبری ربات در زمان واقعی با استفاده از سیستم های ادراک زمان واقعی در مطالعات آینده اعمال کنیم. (3) ممکن است یک روش حاشیه نویسی معنایی یادگیری برای برچسب گذاری و مکان یابی ساختار داخلی بررسی شود تا بررسی شود که آیا نتایج نقشه ساخته شده باید به روز شوند یا خیر. اجسام متحرک و غیر متحرک در فضاهای داخلی باید در حین پیمایش تفکیک شده و با وزن های مختلف ارائه شوند. (4) یک چارچوب FSS ممکن است برای تسهیل استفاده از روش ما برای ناوبری ربات های داخلی در فضاهای بزرگتر حاوی اتاق ها و راهروهای بیشتر مورد نیاز باشد.
مشارکت های نویسنده
مفهوم سازی، کین یه و پنگ چنگ شی. روششناسی، پنگچنگ شی، کین یه، و لینگون زنگ. اعتبارسنجی، Pengcheng Shi و Lingwen Zeng. تحلیل رسمی، Qin Ye و Pengcheng Shi; تحقیق، پنگ چنگ شی. منابع، Pengcheng Shi و Qin Ye; مدیریت داده، پنگ چنگ شی. نوشتن – آماده سازی پیش نویس اصلی، Pengcheng Shi; نوشتن-بررسی و ویرایش، پنگ چنگ شی و کین یه. تجسم، پنگ چنگ شی. نظارت، Qin Ye; مدیریت پروژه، Qin Ye; کسب بودجه، Qin Ye. همه نویسندگان نسخه منتشر شده نسخه خطی را خوانده و با آن موافقت کرده اند.
منابع مالی
این پروژه توسط بنیاد ملی علوم طبیعی چین (شماره کمک مالی 41771480) و صندوق باز آزمایشگاه کلیدی پایش و شبیه سازی منابع زمین شهری، MNR (شماره گرنت KF-2019-04-015) حمایت شد.
قدردانی ها
ما با سپاس از Jaesik Park، Qian-Yi Zhou و Vladlen Koltun که در دسترس بودن آنلاین مجموعه داده آزمایشی را فعال کردند، قدردانی می کنیم.
تضاد علاقه
نویسندگان هیچ تضاد منافع را اعلام نمی کنند.
منابع
- اوستربرینگ، ام. توواندر، ال. ماتا، É. والباوم، اچ. بازنمایی فضایی چند مقیاسی خاص سهامداران از ساختمانهای شهری. ISPRS Int. J. Geo-Inf. 2018 ، 7 ، 173. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- Lehtola، VV; کارتینن، اچ. ناچر، ا. کایجالوئوتو، آر. کوکو، ا. لیتکی، پی. هونکوارا، ای. روسنل، تی. واجا، MT; ویرتانن، جی.-پی. و همکاران مقایسه روشهای منتخب پیشرفته اسکن سهبعدی داخل ساختمان و روشهای تولید ابر نقطهای. Remote Sens. 2017 , 9 , 796. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- پیچینی، جی. آویتابیل، جی. کوویلو، جی. Talarico، C. مدلسازی یک سیستم موقعیتیابی داخلی با قابلیت تنظیم مجدد بر اساس معماری رادیویی تعریفشده نرمافزار. در مجموعه مقالات نسل جدید CAS 2018 (NGCAS)، والتا، مالت، 20 تا 23 نوامبر 2018؛ صص 174-177. [ Google Scholar ] [ CrossRef ]
- دیویس، جی. مارشنر، اس آر. گار، م. Levoy, M. پر کردن سوراخ ها در سطوح پیچیده با استفاده از انتشار حجمی. در مجموعه مقالات سمپوزیوم پردازش سه بعدی داده، تجسم و انتقال (3DPVT)، پادووا، ایتالیا، 19 تا 21 ژوئن 2002. ص 428-441. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- کیم، سی. ماه، اچ. لی، دبلیو. چارچوب مدیریت داده بازسازی مدل سه بعدی مبتنی بر پهپاد سایت فاجعه. در مجموعه مقالات بیست و سومین آرشیو بین المللی فتوگرامتری، سنجش از دور و کنگره علوم اطلاعات فضایی (ISPRS)، پراگ، جمهوری چک، 12 تا 19 ژوئیه 2016؛ صص 31-33. [ Google Scholar ] [ CrossRef ]
- صمد، س. لیم، اس. Sara, S. پیادهسازی مدلسازی سریع اطلاعات ساختمان با استفاده از موبایل LiDAR. در مجموعه مقالات کنگره تحقیقات ساخت و ساز 2014 (CRC): ساخت و ساز در یک شبکه جهانی، آتلانتا، GA، ایالات متحده آمریکا، 19-21 مه 2014. ص 209-218. [ Google Scholar ] [ CrossRef ]
- چیابراندو، اف. دی پیترا، وی. لینگوا، ا. چو، ی. Jeon, J. یک کاربرد اصلی مکان مبتنی بر تشخیص تصویر در محیطهای پیچیده داخلی. ISPRS Int. J. Geo-Inf. 2017 ، 6 ، 56. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- گوپتا، تی. لی، اچ. نقشه برداری داخلی برای شهرهای هوشمند – یک رویکرد مقرون به صرفه: استفاده از سنسور کینکت و دوربین استریو ZED. در مجموعه مقالات کنفرانس بین المللی 2017 در موقعیت یابی داخلی و ناوبری داخلی (IPIN)، ساپورو، ژاپن، 18 تا 21 سپتامبر 2017؛ صص 1-8. [ Google Scholar ] [ CrossRef ]
- لان، ز. Yew, ZJ; بازسازی صحنه های فضای باز در مقیاس بزرگ بر اساس ابر نقطه ای قوی لی، جی اچ. در مجموعه مقالات کنفرانس IEEE/CVF 2019 در مورد بینایی کامپیوتری و تشخیص الگو (CVPR)، لانگ بیچ، کالیفرنیا، ایالات متحده آمریکا، 15 تا 20 ژوئن 2019؛ صفحات 9682-9690. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- اسکوراتوفسکی، اس. گورووی، آی. ووک، وی. شاراپوف، دی. چارچوب نقشه برداری فضای باز: از تصاویر تا مدل سه بعدی. در مجموعه مقالات سمپوزیوم پردازش سیگنال 2019 (SPSympo)، کراکوف، لهستان، 17 تا 19 سپتامبر 2019؛ صص 296-399. [ Google Scholar ] [ CrossRef ]
- دبادیتیا، ا. کوروش، ک. Stephan, W. BIM-PoseNet: محلیسازی دوربین داخلی با استفاده از مدل سه بعدی داخلی و یادگیری عمیق از تصاویر مصنوعی. ISPRS J. Photogramm. Remote Sens. 2019 ، 150 ، 245–258. [ Google Scholar ] [ CrossRef ]
- لیو، ام. ژانگ، ک. ژو، جی. وانگ، جی. گوا، جی. Guo, Y. مدلسازی صحنه داخلی مبتنی بر داده از یک تصویر تک رنگ با تقسیمبندی شی تکراری و بازیابی مدل. IEEE Trans. Vis. محاسبه کنید. نمودار. 2020 ، 26 ، 1702-1715. [ Google Scholar ] [ CrossRef ] [ PubMed ]
- لیو، ام. ژانگ، ی. او، جی. گوا، جی. Guo, Y. بازیابی مدل سه بعدی مبتنی بر تصویر برای صحنه های داخلی با شبیه سازی زمینه صحنه. در مجموعه مقالات بیست و پنجمین کنفرانس بین المللی IEEE در مورد پردازش تصویر (ICIP)، آتن، یونان، 7 تا 10 اکتبر 2018؛ صص 3658–3662. [ Google Scholar ] [ CrossRef ]
- تران، اچ. Khoshelham، K. بازسازی رویهای مدلهای 3 بعدی داخلی از دادههای Lidar با استفاده از زنجیره پرش برگشتپذیر مارکوف مونت کارلو. Remote Sens. 2020 , 12 , 838. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- پانگ، ام. لو، سی. می، ایکس. Lin, H. شتاب تشخیص سایه با Octree و مدل Specular بهبود یافته برای انتشار در فضای داخلی با استفاده از داده های ابر نقطه ای. در مجموعه مقالات کنفرانس بین المللی IEEE 2018 در مورد الکترومغناطیسی محاسباتی (ICCEM)، چنگدو، چین، 26 تا 28 مارس 2018؛ صص 1-3. [ Google Scholar ] [ CrossRef ]
- کیم، BK محلی سازی داخلی و تولید ابر نقطه برای مدل سازی داخلی ساختمان. در مجموعه مقالات IEEE RO-MAN 2013، Gyeongju، کره، 26-29 اوت 2013. ص 186-191. [ Google Scholar ] [ CrossRef ]
- پوکس، اف. نوویل، آر. Nys, G.-A.; Billen, R. مدلسازی معنایی ابر نقطه سه بعدی: چارچوب یکپارچه برای فضاهای داخلی و مبلمان. Remote Sens. 2018 , 10 , 1412. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- دیاز-ویلارینو، ال. مارتینز-سانچز، جی. لاگوئلا، اس. آرمستو، جی. خوشلحم، ک. تشخیص درب در فضای داخلی ساختمان بهم ریخته با استفاده از تصاویر و داده های لیدار. در مجموعه مقالات سمپوزیوم پنجم کمیسیون فنی ISPRS، ریوا دل گاردا، ایتالیا، 23 تا 25 ژوئن 2014. ص 203-209. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- دومیترو، R.-C.; Nüchter, A. بازسازی داخلی با استفاده از تبدیل 3D Hough. در مجموعه مقالات بازسازی مجازی سه بعدی و تجسم معماری های پیچیده (3D-ARCH)، ترنتو، ایتالیا، 25-26 فوریه 2013. صص 65-72. [ Google Scholar ]
- لی، جی. او، X. Li, J. 2D LiDAR و ترکیب دوربین در مدلسازی سه بعدی محیط داخلی. در مجموعه مقالات NAECON 2015 — IEEE کنفرانس ملی هوافضا و الکترونیک، دیتون، OH، ایالات متحده آمریکا، 15-19 ژوئن 2015. صص 379-383. [ Google Scholar ] [ CrossRef ]
- یانگ، ال. چنگ، اچ. سو، جی. Li، X. فاصله پیکسل تا مدل برای بازسازی پسزمینه قوی. IEEE Trans. سیستم مدار. فناوری ویدئو 2019 ، 26 ، 903–916. [ Google Scholar ] [ CrossRef ]
- پولفیس، ام. نیستر، م. فرام، جی.ام. اکبرزاده، ع. مردوهای، پ. کلیپ، بی. انگلس، سی. گالوپ، دی. کیم، اس جی. مرل، پی. و همکاران بازسازی سه بعدی شهری در زمان واقعی از ویدئو. بین المللی جی. کامپیوتر. Vis. 2008 ، 78 ، 143-167. [ Google Scholar ] [ CrossRef ]
- وانگ، اچ. وانگ، جی. وانگ، ال. بازسازی آنلاین صحنه های داخلی از جریان های RGB-D. در مجموعه مقالات کنفرانس IEEE 2016 در مورد بینایی کامپیوتری و تشخیص الگو (CVPR)، لاس وگاس، NV، ایالات متحده آمریکا، 27 تا 30 ژوئن 2016؛ صص 3271-3279. [ Google Scholar ] [ CrossRef ]
- ما، ال. ویلان، تی. بوندارف، ای. د با، PHN; مکدونالد، جی. سادهسازی و بافتدهی پلانار نقشههای ابر نقطهای متراکم. در مجموعه مقالات کنفرانس اروپایی ربات های متحرک 2013، بارسلون، اسپانیا، 25 تا 27 سپتامبر 2013. صص 164-171. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- فیشتر، اس. Hlavacs، H. ساده سازی مسطح محیط های نقطه-ابر داخلی. در مجموعه مقالات کنفرانس بین المللی IEEE 2018 در زمینه هوش مصنوعی و واقعیت مجازی (AIVR)، تایچونگ، تایوان، 10 تا 12 دسامبر 2018؛ ص 274-281. [ Google Scholar ] [ CrossRef ]
- آدان، ع. هوبر، دی. بازسازی 3 بعدی سطوح دیوار داخلی تحت انسداد و درهم ریختگی. در مجموعه مقالات کنفرانس بین المللی 2011 در تصویربرداری سه بعدی، مدلسازی، پردازش، تجسم و انتقال (3DIMPVT)، هانگژو، چین، 16-19 مه 2011. ص 275-281. [ Google Scholar ] [ CrossRef ]
- اوسائو، اس. لافارژ، اف. Alliez, P. بازسازی صحنه داخلی با استفاده از استخراج اولیه حساس به ویژگی و برش نمودار. ISPRS J. Photogramm. Remote Sens. 2014 ، 90 ، 68-82. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- شوی، دبلیو. لیو، جی. رن، پی. مدوک، اس. ژو، ام. تقسیم بندی خودکار شکل مسطح از ابرهای نقطه داخلی. در مجموعه مقالات پانزدهمین کنفرانس ACM SIGGRAPH در مورد پیوستار واقعیت مجازی و کاربردهای آن در صنعت، VRCAI، زوهای، چین، 3 تا 4 دسامبر 2016؛ صص 363-372. [ Google Scholar ] [ CrossRef ]
- جورجیوس-تسامپیکوس، م. بهینه سازی برش نموداری رناتو، پی بیزی برای بازسازی سطوح دیوار در محیط های داخلی. Vis. محاسبه کنید. 2017 ، 33 ، 1347–1355. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- ژو، ک. گورته، بی. زلاتانووا، اس. کاوش قوانین برای بهبود بازسازی نما از ابرهای نقطه ای. در مجموعه مقالات بیست و سومین آرشیو بین المللی فتوگرامتری، سنجش از دور و کنگره علوم اطلاعات فضایی (ISPRS)، پراگ، جمهوری چک، 12 تا 19 ژوئیه 2016؛ صص 749-755. [ Google Scholar ] [ CrossRef ]
- ما، ال. فاویر، آر. انجام، ال. بوندارف، ای. de With، تقسیمبندی صفحه PHN و حذف ابرهای نقطهای برای بازسازی محیط سه بعدی. در مجموعه مقالات دهمین کنفرانس ارتباطات و شبکه سازی مصرف کننده 2013 IEEE (CCNC)، لاس وگاس، NV، ایالات متحده، 11 تا 14 ژانویه 2013. ص 43-49. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- ترنر، ای. زاخور، الف. مش بندی سطح مسطح آب بند ابرهای نقطه ای داخلی با حکاکی وکسل. در مجموعه مقالات کنفرانس بین المللی 2013 در 3D Vision، سیاتل، WA، ایالات متحده آمریکا، 29 ژوئن تا 1 ژوئیه 2013. ص 41-48. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- دیمیتروف، آ. گل پرور فرد، م. تقسیم بندی مدل های ابر نقطه ساختمان شامل ویژگی های دقیق معماری/سازه ای و سیستم های MEP. خودکار ساخت و ساز 2015 ، 51 ، 32-45. [ Google Scholar ] [ CrossRef ]
- پوکس، اف. تقسیمبندی معنایی ابر نقطه سهبعدی مبتنی بر Billen، R. Voxel: هندسی و رابطهای بدون نظارت با روشهای یادگیری عمیق در مقابل. ISPRS Int. J. Geo-Inf. 2019 ، 8 ، 213. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- پاپون، ج. آبراموف، آ. شولر، ام. ورگوتر، F. تقسیمبندی اتصال ابری وکسل – سوپروکسلها برای ابرهای نقطهای. در مجموعه مقالات کنفرانس IEEE 2013 در مورد بینایی کامپیوتری و تشخیص الگو (CVPR)، پورتلند، OR، ایالات متحده آمریکا، 23 تا 28 ژوئن 2013. صفحات 2027–2034. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- Vo، AV; ترونگ-هنگ، ال. Laefer، DF; منطقه برتولتو، M. Octree در حال رشد برای تقسیمبندی ابر نقطهای. ISPRS J. Photogramm. Remote Sens. 2015 ، 104 ، 88-100. [ Google Scholar ] [ CrossRef ]
- ارمنی، من. سنر، او. ضمیر، ع. جیانگ، اچ. بریلاکیس، آی. فیشر، ام. Savarese, S. تجزیه معنایی سه بعدی فضاهای داخلی در مقیاس بزرگ. در مجموعه مقالات کنفرانس IEEE 2016 در مورد بینایی کامپیوتری و تشخیص الگو (CVPR)، لاس وگاس، NV، ایالات متحده آمریکا، 27 تا 30 ژوئن 2016؛ صص 1534-1543. [ Google Scholar ] [ CrossRef ]
- اوچمن، اس. ووک، آر. وسل، آر. تمکه، م. کلاین، آر. تولید خودکار توضیحات ساختمانی از اسکنهای سه بعدی ابر نقطه. در مجموعه مقالات نهمین کنفرانس بین المللی تئوری و کاربردهای گرافیک کامپیوتری، لیسبون، پرتغال، 5 تا 8 ژانویه 2014. صص 120-127. در دسترس آنلاین: https://cg.cs.uni-bonn.de/aigaion2root/attachments/GRAPP_2014_54_CR.pdf (دسترسی در 17 ژوئن 2020).
- چوینکو کوادجو، دی. چیندا، ن. بوبدا، سی. منادجو، ن. فوتسینگ، سی. Nziengam، N. از PC2BIM: تولید مدل خودکار از Indoor Point Cloud. در مجموعه مقالات سیزدهمین کنفرانس بین المللی دوربین های هوشمند توزیع شده، ترنتو، ایتالیا، 9 تا 11 سپتامبر 2019؛ صص 1-6. [ Google Scholar ] [ CrossRef ]
- یانگ، اف. لی، ال. سو، اف. لی، دی. زو، اچ. یینگ، اس. زو، ایکس. Tang، L. تجزیه معنایی و شناخت فضاهای داخلی با محدودیتهای ساختاری برای مدلسازی 3 بعدی داخلی. خودکار ساخت و ساز 2019 ، 106 ، 319-339. [ Google Scholar ] [ CrossRef ]
- شی، دبلیو. احمد، دبلیو. لی، ن. فن، دبلیو. شیانگ، اچ. وانگ، ام. مدلسازی هندسی معنایی ابر نقطهای داخلی بدون ساختار. ISPRS Int. J. Geo-Inf. 2019 ، 8 ، 9. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- وانگ، سی. هو، اس. ون، سی. گونگ، ز. لی، کیو. سان، ایکس. Li, J. مدلسازی ساختمان داخلی مبتنی بر چارچوب خط معنایی با استفاده از ابر نقطه اسکن لیزری کولهای. ISPRS J. Photogramm. Remote Sens. 2018 , 143 , 150–166. [ Google Scholar ] [ CrossRef ]
- Xiong، X. Huber, D. استفاده از زمینه برای ایجاد مدل های معنایی سه بعدی محیط های داخلی. در مجموعه مقالات بیست و یکمین کنفرانس بینایی ماشین بریتانیا در سال 2010، Aberystwyth، ولز، انگلستان، 31 اوت تا 3 سپتامبر 2010. صفحات 45.1-45.11. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- کوی، ی. لی، کیو. یانگ، بی. شیائو، دبلیو. چن، سی. Dong, Z. بازسازی خودکار سه بعدی محیط داخلی با ابرهای نقطه اسکن لیزری سیار. IEEE J. Sel. بالا. Appl. زمین Obs. Remote Sens. 2019 , 12 , 3117–3130. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- Xiong، X. آدان، ع. آکینجی، بی. Huber، D. ایجاد خودکار مدلهای ساختمانی سه بعدی غنی از نظر معنایی از دادههای اسکنر لیزری. خودکار ساخت و ساز 2013 ، 31 ، 325-337. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- یانگ، ال. Worboys, M. Generation of Navigation graphs for space indoor. بین المللی جی. جئوگر. Inf. علمی 2015 ، 29 ، 1737-1756. [ Google Scholar ] [ CrossRef ]
- براون، جی. ناگل، سی. زلاتانوا، اس. Kolbe, T. مدلسازی فضای توپوگرافی سه بعدی در برابر الزامات ناوبری داخلی. در مجموعه مقالات هفتمین کارگاه بین المللی در زمینه اطلاعات جغرافیایی سه بعدی، شهر کبک، QC، کانادا، 16-17 می 2012. صص 1-22. [ Google Scholar ] [ CrossRef ]
- نیکوهمت، س. دیاکیته، آ. زلاتانوا، اس. Vosselman، G. مدلسازی سه بعدی داخلی و زیربخش فضای منعطف از Point Clouds. در مجموعه مقالات چهارمین هفته زمین فضایی ISPRS، Enschede، هلند، 10-14 ژوئن 2019؛ ص 285-292. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- Diakité، AA; زلاتانوا، S. تقسیم بندی فضایی محیط های داخلی پیچیده برای ناوبری سه بعدی داخلی. بین المللی جی. جئوگر. Inf. علمی 2018 ، 32 ، 213-235. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- زلاتانوا، اس. لیو، ال. Sithole, G. چارچوب مفهومی تقسیم فضا برای ناوبری داخلی. در مجموعه مقالات پنجمین کارگاه بین المللی ACM SIGSPATIAL در مورد آگاهی فضایی داخلی، اورلاندو، فلوریدا، ایالات متحده آمریکا، 5 نوامبر 2013. صص 37-41. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- تنجا، س. آکینجی، بی. گرت، جی. Soibelman, L. الگوریتمهای تولید خودکار مدلهای ناوبری از مدلهای اطلاعات ساختمان برای پشتیبانی از تطبیق نقشههای داخلی. خودکار ساخت و ساز 2016 ، 61 ، 24-41. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- Flikweert، P. پیترز، آر. دیاز-ویلارینو، ال. ووت، آر. Staats، B. استخراج خودکار یک نمودار ناوبری در نظر گرفته شده برای IndoorGML از یک ابر نقطه داخلی. در مجموعه مقالات چهارمین هفته زمین فضایی ISPRS، Enschede، هلند، 10-14 ژوئن 2019؛ صص 271-278. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- بوگوسلاوسکی، پ. مهجوبی، ل. زوروویچ، وی. Fadli, F. ساخت خودکار شبکه های قابل پیمایش با چگالی متغیر در یک محیط داخلی سه بعدی برای پاسخ اضطراری. خودکار ساخت و ساز 2016 ، 72 ، 115-128. [ Google Scholar ] [ CrossRef ]
- لی، اف. وانگ، اچ. Akwensi، PH; Kang, Z. ساخت نقشه عنصر مانع بر اساس تشخیص صحنه داخلی. در مجموعه مقالات چهارمین هفته زمین فضایی ISPRS، Enschede، هلند، 10-14 ژوئن 2019؛ صص 819-825. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- ناکاگاوا، م. نوزاکی، R. تولید مدل شبکه هندسی با استفاده از داده های ابر نقطه ای برای ناوبری داخلی. در مجموعه مقالات سمپوزیوم میان مدت ISPRS TC IV 2018 در علم اطلاعات فضایی سه بعدی – موتور تغییر، دلفت، هلند، 1 تا 5 اکتبر 2018؛ صص 141-146. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- لیو، ال. زلاتانوا، اس. تولید مدلهای ناوبری از دادههای ساختمان موجود. در مجموعه مقالات ISPRS 2013 اکتساب و مدل سازی محیط های داخلی و بسته، کیپ تاون، آفریقای جنوبی، 11-13 دسامبر 2013. صص 19-25. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- عبدالله، ع. سیسی، ز. پیتر، وی. Ki-Joune، L. مدل مفهومی بهبود یافته و کاملتر برای بازبینی IndoorGML. در مجموعه مقالات دهمین کنفرانس بین المللی علوم اطلاعات جغرافیایی (GIScience 2018)، ملبورن، استرالیا، 28 تا 31 اوت 2018. [ Google Scholar ] [ CrossRef ]
- والتون، لس آنجلس؛ Worboys, M. A Qualitative Bigraph Model for Indoor Space. در مجموعه مقالات هفتمین کنفرانس بین المللی علم اطلاعات جغرافیایی (GIScience 2012)، کلمبوس، OH، ایالات متحده آمریکا، 18-21 سپتامبر 2012; ص 226-240. [ Google Scholar ] [ CrossRef ]
- اشنابل، آر. وال، آر. Klein, R. RANSAC کارآمد برای تشخیص شکل نقطه-ابر. محاسبه کنید. نمودار. انجمن 2007 ، 26 ، 214-226. [ Google Scholar ] [ CrossRef ]
- اوکورن، BE; Xiong، X. آکینجی، بی. هوبر، دی. به سمت مدل سازی خودکار پلان های طبقه. در مجموعه مقالات سمپوزیوم در پردازش سه بعدی داده، تجسم و انتقال، پاریس، فرانسه، 17-20 مه 2010. در دسترس آنلاین: https://ri.cmu.edu/pub_files/2010/5/2009%203DPVT%20plan%20view%20modeling%20v13%20 (دوباره ارسال شده).pdf (در 23 ژوئن 2020 قابل دسترسی است).
- لی، ام. ونکا، پی. نان، ال. منهتن- بازسازی شهری جهان از ابرهای نقطه ای. در مجموعه مقالات کنفرانس اروپایی بینایی کامپیوتر (ECCV)، آمستردام، هلند، 11 تا 14 اکتبر 2016. صص 54-69. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- پارک، جی. ژو، Q. Koltun، V. ثبت ابر نقطه رنگی دوباره مورد بازدید قرار گرفت. در مجموعه مقالات کنفرانس بین المللی IEEE 2017 در بینایی کامپیوتر (ICCV)، ونیز، ایتالیا، 22 تا 29 اکتبر 2017؛ صص 143-152. [ Google Scholar ] [ CrossRef ]





























بدون دیدگاه