1. معرفی
زمین سیاره ای ناپایدار است که به دلیل تأثیر فرآیندهای دینامیکی متنوعی که در داخل زمین، در سطح و در جو آن اتفاق می افتد، دائماً تغییر می کند. محرکهای این فرآیندهای پویا، نیروهای داخلی و خارجی اصلی هستند که بر سیاره ما عمل میکنند. نیروهای درونی یا درون زا از درون بر روی سیاره ما اثر می گذارند که از هسته، بالای گوشته و تا پوسته (اقیانوسی و قاره ای) شروع می شود. فرآیندهای داخلی دائماً سطح زمین را به دلیل افزایش تنش با عمق تغییر شکل می دهند که ناشی از نیروهای گرانشی در زیر و در سطح زمین است [ 1 ]]. از سوی دیگر نیروهای خارجی یا برون زا از بیرون بر بدن زمین اثر می گذارند. هوازدگی، فرسایش و سایر اثرات پدیده های طبیعی سطح فیزیکی زمین را مدل سازی می کنند. با این حال، تغییر شکل بدن زمین نیز توسط جاذبه ماه و خورشید ایجاد می شود [ 2 ]. به دلیل فرآیندهای پویا در داخل، جو و اقیانوس، بسیاری از مناطق سطح زمین در معرض بلایای طبیعی مانند زلزله، فوران آتشفشان، سیل، سونامی، هشدار جهانی و غیره هستند [ 3 ]]. دانشمندان تلاش زیادی برای درک بهتر تغییرات زمین انجام می دهند، جایی که یکی از اهداف اصلی پیش بینی خطرات طبیعی است. انگیزه برخی از این مخاطرات طبیعی ریشه در حرکات صفحات تکتونیکی زمین دارد. دینامیک و تکامل زمین جامد، از جمله، باعث حرکات و تغییر شکل صفحات تکتونیکی می شود [ 4 ]. مدل سازی و پردازش مشاهدات مجموعه داده های بزرگ اغلب برای درک بهتر این فرآیندها مورد نیاز است.
ویژگی های ژئودزی، به عنوان علمی که با اندازه گیری و نقشه برداری از سطح زمین سروکار دارد، امروزه هنوز اساسی است. با در نظر گرفتن این موضوع، ویژگیهای اساسی ژئودزی باید با آگاهی از این که میدان گرانشی زمین شکل آن را تعیین میکند، گسترش یابد. درک مدرن از ژئودزی اساس خود را برای رویههایی که با اندازهگیریهای دقیق و تعیین شکل هندسی زمین، جهتگیری آن در فضا، و میدان گرانش و همچنین تکامل آن در زمان سروکار دارند، گسترش یافته است.
تکنیک های اندازه گیری مبتنی بر ماهواره به طور مستمر دستخوش تغییرات و پیشرفت هایی می شود که تأثیر قابل توجهی در زمینه ژئودزی دارد. در نتیجه، چارچوبهای مرجع و مدلهای سینماتیک دقیقتر تعریف میشوند. با توجه به درک جدید و دقیق تر از چارچوب های مرجع، نیاز به هماهنگ کردن تبدیل بین آنها هر روز افزایش می یابد. این واقعیت که نقاط روی سطح زمین ثابت نیستند، بلکه تابعی از زمان هستند که به دلیل حرکت صفحات تکتونیکی هستند، نیاز به تبدیل مختصات زمانی سریعتر و ساده تر را افزایش می دهد. ما به این نتیجه رسیدیم که دانشمندان و کارشناسانی که با نیاز روزمره به تبدیل مختصات زمانی سادهتر و سریعتر سر و کار دارند تا حد زیادی از یکی از این کاربردهای منحصربهفرد بهرهمند خواهند شد. قبل از هر اقدام دیگری، تحقیق در مورد ابزارهای تبدیل مشابه انجام شد. ابزارهای آنلاین موجود (نگاه کنید به [5 ، 6 ، 7 ] و غیره) برای بررسی امکان محاسبه سرعت نقطه و در نهایت تبدیل سرعت همزمان با تبدیل مختصات آزمایش شدند. نتایج آن آزمایش نشان داد که وب موجود و ابزارهای مشابه موجود تنها دارای ویژگیهای تبدیل مختصات پایه هستند، بدون اینکه امکان محاسبه و تبدیل سرعت بیشتر وجود داشته باشد. با توجه به آن تحقیق، توسعه اپلیکیشن دسکتاپ مستقل TranSAB آغاز شد.
برنامه دسکتاپ مستقل TranSAB محصول خواسته و دیدگاه ما برای اتصال زمینه های علمی مختلف به یک سیستم سازگار، کاربردی و پایدار است. برنامه TranSAB تغییر هماهنگی بین تحقق های مختلف سیستم مرجع بین المللی زمینی (ITRS) و سیستم مرجع زمینی اروپا 1989 (ETRS89) را که تاکنون منتشر شده است را امکان پذیر می کند. با این حال، چیزی که این نرم افزار را اصلی می کند، امکان محاسبه سرعت ایستگاه به دلیل جابجایی مختصات سالانه ناشی از تکتونیک صفحه است. سرعتهای ایستگاه از مدلهای سینماتیکی مناسب صفحه تکتونیکی اوراسیا و مدلهای سینماتیکی اصلی ریزصفحه آدریاتیک (که بخشی از صفحه اوراسیا است و توسط تحقیقات خود ما مستقر شده است) به دست میآید [ 8 ، 9 ]، 10 ]). علاوه بر محاسبات، کاربر این گزینه را دارد که سرعت ها را در یک چارچوب مرجع تعریف شده پیشینی تبدیل کند.
2. چارچوب مرجع زمینی به عنوان محصول “سه ستون” ژئودزی
زمین، محیط آن و سایر اجرام آسمانی در جهان موقعیت مطلقی ندارند. آنها حرکت می کنند، می چرخند و در معرض تغییرات هستند. وظایف ژئودزی، ژئوفیزیک و نجوم پیش بینی (تعیین) سینماتیک و دینامیک آنها است [ 11 ]. برای پیشبینی این رفتارها، داشتن مجموعه دادههای موجود (موقعیت و سرعت) به طور یکنواخت در سطح زمین بسیار ضروری است. از آنجایی که موقعیتها و سرعتهای بهدستآمده با اندازهگیریهای زمینشناسی مشاهدات مستقیم نیستند، بلکه کمیتهای تخمینی هستند، این نیاز به یک مرجع زمینی را افزایش میدهد که در آن موقعیتها و سرعتها را بتوان بیان کرد [ 12 ].]. با توجه به این نیاز، چارچوب مرجع زمینی (TRF) به یک مرجع زمینی تبدیل می شود. یک TRF مجموعه ای از نقاط فیزیکی با مختصات دقیق تعیین شده در یک سیستم مختصات گسسته [ 13 ] است و به این ترتیب، نشان دهنده تحقق سیستم مرجع زمینی (TRS) از نظر تئوری تعریف شده است [ 14 ].
“سه ستون” ژئودزی، همانطور که در شکل 1 نشان داده شده است، به شکل هندسی وابسته به زمان، میدان گرانشی وابسته به زمان و چرخش زمین اشاره دارد [ 15 ]. آنها یک مبنای مفهومی و رصدی برای چارچوب های مرجع ضروری و اجتناب ناپذیر برای رصد زمین را نشان می دهند. این سه ستون به طور متقابل متصل هستند و در هم تنیده شده اند زیرا مشاهدات متفاوت مربوط به فرآیندهای زمین مشابه را ارائه می دهند [ 3 ].
3. پدیده های ژئودینامیکی – تکتونیک صفحه ای
از نظر زمین شناسی، صفحه، آفریده ای عظیم و صلب از سنگ جامد است، در حالی که کلمه تکتونیکی از زبان یونانی گرفته شده و به کلمه ساختن اطلاق می شود. تئوری تکتونیک صفحه ای در پایان قرن شانزدهم زمانی که سر فرانسیس بیکن متوجه شکل مشابه خطوط ساحلی قاره آمریکا و آفریقا در مشاهدات خود شد [ 16 ] سرچشمه گرفت. به دنبال آن نظریه، می توان بیان کرد که پوسته زمین از 14 تا 16 صفحه سنگی اصلی تشکیل شده است که بر روی آستنوسفر داغ چسبناک شناور هستند [ 17 ]. در 30 سال گذشته، اندازهگیریهای ژئودتیک فضایی برای تعیین حرکات تکتونیکی صفحه استفاده شده است [ 18 ]]. دادههای بهدستآمده از اندازهگیریهای ژئودتیک فضایی برای آزمایش این فرضیه که حرکت صفحهای پایدار است، استفاده شده است. بنابراین، در نظر گرفته میشود که آیا میانگین مشاهدات نرخها و جابجاییهای تکتونیک صفحهای بهدستآمده در یک دوره کوتاه (چند سال) مشابه نرخها و جابجاییهای متوسط تکتونیک صفحه بهدستآمده از تخمینهای سیستماتیک ناهنجاریهای مغناطیسی دریایی (دوره طولانی، در طول یک دوره) است یا خیر. میلیون سال) [ 19 ]. کمی کردن حرکت تکتونیکی صفحه برای درک ساختار داخلی و رفتار صفحات تکتونیکی مهم است که شامل روابط این فرآیندها با زلزله و فعالیت های آتشفشانی است. همانطور که در بالا ذکر شد، دادههای بهدستآمده از اندازهگیریهای ژئودزی فضایی امکان ارزیابی حرکات صفحه در سطح زیر سانتیمتری را در هر سال فراهم میکند [ 20 ]].
سرعت نقاط روی سطح فیزیکی زمین ناشی از حرکات صفحه است و می توان آن را با مدل های سینماتیکی حرکات تکتونیکی صفحه توصیف کرد. مدل های سینماتیکی را می توان با دو مجموعه داده مستقل (یا ترکیبی از آنها) یا با داده های ژئودزی ماهواره ای [ 8 ] تعیین کرد. طبق نظر بکر و فاسنا [ 21 ]، مدلهای حرکت صفحه را میتوان به دو گروه اصلی تقسیم کرد: مدلهای سینماتیک مطلق، که در چارچوب مرجع مطلق تعریف میشوند، و مدلهای سینماتیک نسبی، که در چارچوب مرجع حرکت صفحه نسبت به دیگری تعریف میشوند. برای نیازهای سینماتیک صفحه و تحلیل دینامیکی، دو قاب مرجع مطلق اعمال شده است [ 22]: چارچوب مرجع نقطه (HSRF)، بر اساس این فرض که نقاط داغ گسسته نسبت به مزوسفر و به طور متقابل، و چارچوب بدون توری (NNR) بر اساس این فرض که لیتوسفر و استنوسفر به طور جدایی ناپذیری به هم مرتبط هستند. به یکدیگر. مدلهای حرکت صفحه فعلی با شرط NNR تعریف میشوند، یا به عبارت دیگر، چرخش سیستم مرجع نسبت به لیتوسفر زمین صفر است. این بدان معناست که سیستم مرجع هیچ محدودیتی با توجه به حرکات لیتوسفر ندارد [ 8 ]. علاوه بر این، NNR می تواند به صورت ریاضی به عنوان یک شرط Tisserand بیان شود. شرط تیسراند بیان می کند که مجموع تکانه زاویه ای کل زمین (همه صفحات زمین) صفر است و می توان آن را به صورت [ 23 ] بیان کرد.
در معادله (1) L→مجموع تکانه زاویه ای کل لیتوسفر زمین است، V→بردار سرعت بردار موقعیت مربوطه آن است ( r→) D کل سطح لیتوسفر زمین است و dm واحد جرم زمین است.
صفحه تکتونیکی موجود در یک مدل سینماتیکی خاص با شش پارامتر [ 24 ] تعیین می شود. سه مورد از این پارامترها مربوط به قطب اویلر است: عرض جغرافیایی جغرافیایی، φ ( ° ). طول جغرافیایی، λ ( ° )؛ و سرعت زاویه ای، Ω ( ° / Myr ). سه جزء دیگر مربوط به بردار چرخش اویلر ( Ω→ایکس،Y،ز) و بردار چرخش زاویه ای را نشان می دهد ( Ωایکس، ΩY، Ωز) در یک قاب ژئوسنتریک دکارتی (معمولاً بر حسب واحد راد/Myr ). پیوند بین بردار چرخش اویلر و قطب اویلر با معادله (2) [ 24 ] نشان داده شده است:
که در رابطه معکوس در رابطه (3) آورده شده است:
در مکانی که با مختصات ( XT ، YT ، ZT ) یک نقطه T در سطح زمین تعریف شده است، سرعت های یک بردار چرخش اویلر به صورت [ 24 ] ارائه می شود.
در رابطه (4)، V X / Δ T ، V Y /Δ T و V Z / Δ T بر حسب میلی متر در سال هستند.
4. تحولات رسمی چارچوب مرجع اروپایی (EUREF) بین فریم های مرجع مختلف
سیستم مرجع زمینی اروپا 1989 (ETRS89) در سال 1990 در Firenze، ایتالیا، به دنبال قطعنامه 1 EUREF [ 25 ] به تصویب رسید. این قطعنامه بیان می کند که ETRS89 با ITRS89 در دوره 1989.0 منطبق است و در قسمت پایدار صفحه اوراسیا ثابت است [ 26 ]. تکتونیک صفحه در ITRS جهانی باعث تغییر مختصات ایستگاه اروپایی می شود. از این رو، تثبیت ETRS89 به بخش پایدار صفحه اوراسیا در دوره اولیه 1989.0 حداقل وابستگی زمانی بین مختصات ایستگاههای واقع در بخش پایدار اروپا را ممکن میسازد [ 27 ].
یادداشت فنی EUREF (TN) (1) [ 28 ] خلاصه و جایگزین یادداشت های EUREF (8) منتشر شده بین سال های 1993 و 2011 شد.
رابطه ریاضی کلی بین دو سیستم مختصات دکارتی سه بعدی ( X, Y, Z ) A و ( X, Y, Z ) B که تبدیل مختصات و سرعت را امکان پذیر می کند به صورت [ 29 ] ارائه شده است.
که در آن T = ( T X ، T Y ، T Z ) T بردار ترجمه، D ضریب مقیاس، و R ماتریس چرخش است. در معادله (5)، پارامترهای نقطهدار مشتقات زمانی پارامترهای تبدیل (نرخ آنها) هستند. ماتریس چرخش R شامل زوایای چرخش اویلر است و با رابطه (6) به دست میآید:
روابط بین ETRS89 و ITRS که برای تبدیل ایستگاه (مختصات و سرعت) استفاده می شود، نتیجه تعریف ETRS89 است و به صورت بیان می شود.
جایی که ( ایکسyyمن، ایکس˙yyمن)و ( ایکسyyE، ایکس˙yyE)زوج های موقعیت و سرعت برای تحقق yy در ITRS و ETRS89 هستند. در معادله (7)، بردار ترجمه T yy برای جبران مبدا، در صورت وجود، بین تحقق های مختلف ITRF استفاده می شود. پارامترهای نرخ چرخش آر˙1yy، آر˙2yy، آر˙3yyسه جزء هستند – سرعت های زاویه ای صفحه اوراسیا (زوایای چرخش اویلر) که در ITRFyy بیان شده اند – و در جدول 1 و ضمیمه A در Altamimi [ 28 ] فهرست شده اند.
تا زمان حل ETRF97، که شامل آن میشود، سرعت زاویهای اوراسیا در محلول ITRF مربوطه از مدلهای سینماتیکی که در شرایط NNR استفاده میشد، گرفته میشد. آنها مدل AMO2 مینستر و جردن [ 30 ] و NNR-NUVEL1 و NNR-NUVEL1-A آرگوس و گوردون [ 31 ]، بر اساس مدل حرکت صفحه نسبی DeMets و همکاران بودند. [ 32 ].
با شروع ITRF2000، سرعت های زاویه ای اوراسیا (از جمله صفحات دیگر) با استفاده از میدان های سرعت ITRF برآورد شد: ITRF2000، ITRF2005، ITRF2008، و ITRF2014 [ 20 ، 33 ، 34 ] ، 35 . با استفاده از این روشها، ETRF2000 اولین تحقق ETRS89 بود که سرعتهای زاویهای صفحه تکتونیکی اوراسیا را با استفاده از میدان سرعت ITRF ارزیابی کرد [ 36 ].
برای بیان راهحل شبکه ماهوارهای ناوبری جهانی EUREF (GNSS) در ETRS89، رویههای پیشنهادی برای پردازش مجموعه دادههای GNSS (مشاهدات) یک شبکه محلی (منطقهای) EUREF، که به عنوان عصر مرکزی tc نامیده میشود ، از دو مرحله تشکیل شده است . اولین گام، مختصات ایستگاه محاسباتی در ITRS است و به دنبال آن تبدیل به ETRS89 [ 28 ] است.
محاسبه داده های GNSS در ITRS در دوره t c به طور مفصل در EUREF TN-1 [ 28 ] توضیح داده شده است. مختصات باید در دوره مرکزی tc مشاهدات GNSS با توجه به دوره اولیه t 0 ، در صورت لزوم، با عبارت بیان شوند .
کاربران باید در نظر داشته باشند که اگر سازگاری کامل با تعریف ETRS89 مورد نیاز است، انتشار مختصات ایستگاه از دوره مرکزی به هر دوره دیگر، بر اساس هر سرعت درون صفحه، همانطور که در Altamimi [ 28 ] ذکر شد ، توصیه نمی شود.
5. برنامه TranSAB
ایده پیوند رشته های مختلف با هم با در نظر گرفتن وابستگی های ما به ژئودزی و ژئوانفورماتیک متولد شد. علاوه بر این، این واقعیت که Python یکی از محبوب ترین زبان های برنامه نویسی امروزی است و همچنین به طور گسترده در علوم زمین مورد استفاده قرار می گیرد، منجر به مطالعه عمیق تر آن شده است. در نتیجه، ادغام دانش نظری از فرآیندهای دینامیکی زمین با پایتون منجر به توسعه یک برنامه کامپیوتری شد.
پایتون یک زبان برنامه نویسی قدرتمند تفسیر شده، پویا و شی گرا است. در اوایل دهه 1990 توسط Guido van Rossum در Centrum Wiskunde & Informatica (CWI) در هلند ایجاد شد. این یک زبان برنامه نویسی چند پلتفرمی است که با Mac OS X، Windows، Linux، Unix و سایر سیستم عامل ها سازگار است. علاوه بر این، این نرم افزار منبع باز نیز می باشد. ویژگی هایی که در بالا ذکر شد، علاوه بر سینتکس ساده و یادگیری آن، پایتون را امروزه به یک زبان برنامه نویسی بسیار محبوب تبدیل کرده است. یک دلیل بزرگ برای انتخاب پایتون، یادگیری آسان آن بود، و اگرچه پایتون ایراداتی دارد (یعنی کندتر از رقبای خود است، محدودیت هایی در دسترسی به پایگاه داده دارد و برای توسعه موبایل خیلی خوب نیست)، اما این نقص ها نبود. به اندازه کافی حیاتی است که آن را رها کنیم، عمدتاً به خاطر جنگو.
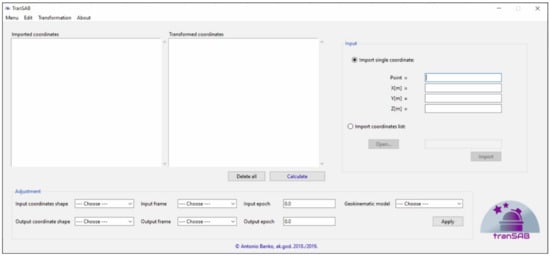
دامنه اصلی برنامه، تبدیل مختصات بین ITRS و ETRS89 است، یعنی تحقق آنها با امکان اضافی تبدیل مختصات زمانی بین آنها. رابط کاربری گرافیکی (GUI) برنامه TranSAB در شکل 2 نمایش داده شده است .
هنگام تبدیل بین تحقق دو سیستم ITRS و ETRS89، تبدیلهای زیر را میتوان اعمال کرد: TRF yy ↔ ITRF xx ، ITRF yy ↔ ETRF yy ، ITRF yy ↔ ETRF xx ، و ETRF yy ↔ ETRF xx ، جایی که yy و xx هستند. تحقق ITRS و ETRS89 (به عنوان مثال، ITRF2000، ETRF2014، و غیره). سیزده راه حل ITRS (ITRF88، 89، 90، 91، 92، 93، 94، 96، 97، 00، 05، 08، و 14) و یازده راه حل ETRS89 (ETRF89، 90، 91، 92، 939، 97، 00، 05 و 14) تاکنون منتشر شده است. میز 1کدهای گروه بررسی نفت اروپا (EPSG) از سیستم های مختصات سه بعدی بیضی و زمین-مرکز، زمین ثابت (ECEF) (CS) از تحقق رسمی ITRS [ 6 ] را ارائه می دهد.
جدول 2 کدهای EPSG سیستم های مختصات سه بعدی و ECEF بیضی شکل تحقق ETRS89 را فهرست می کند [ 6 ].
علاوه بر آن، TranSAB دارای یک ویژگی تبدیل مختصات زمانی است که در آن میتوان سرعت ایستگاه را با استفاده از دو روش تعیین/وارد کرد: ورودی دستی سرعت ایستگاه ( m / سال) یا محاسبه سرعت ایستگاه از مدلهای سینماتیک جهانی NNR. صفحه تکتونیکی اوراسیا ( متر / سال ).
مدلهای سینماتیک جهانی NNR مورد استفاده در برنامه TranSAB عبارتند از: NNR-NUVEL-1 [ 31 ]، NNR-NUVEL-1A [ 32 ]، APKIM2000 [ 37 ]، ITRF2000 [ 38 ]، PB2002 [3920]، [3920] ، [ 39 ] [ 34 ]، MORVEL56 [ 41 ]، ITRF2008 [ 35 ]، MODEL-2008 [ 8 ، 9 ]، CRO-2014 [ 10 ]، CRODYN-2014 [ 10 ]، GEODYN-2014] [2014]، [10] [ 10 ]، GEODYN-2014 [ 10 ]
سرویس تبدیل آنلاین EUREF [ 5 ] که به تبدیل مختصات (موقعیت و سرعت) بین تحقق ITRS و ETRS89 اجازه میدهد به عنوان ابزاری برای اعتبارسنجی نتایج بهدستآمده توسط TranSAB استفاده شد. توصیه های ارائه شده توسط گروه کاری فنی EUREF (TWG) در EUREF TN دنبال شد و پارامترهای تبدیل از جدول 1 و ضمیمه A منتشر شده در Altamimi به تصویب رسید [ 28 ]. فرمول کلی مورد استفاده برای تبدیل مختصات (موقعیت و سرعت) بین تحقق ITRS و ETRS89 با معادله (5) ارائه شده است، که در آن، در مورد یک دوره ورودی متفاوت (دوره مرکزی t c ) با توجه به دوره اولیه t 0 است.، انتشار پارامترها به دوره مرکزی مشاهده با استفاده از رابطه (9) الزامی است. هنگامی که تبدیل بین دو قاب مرجع تعریف شده در سطح جهانی انجام می شود (یعنی چرخش بین دو سیستم مرجع جهانی)، ماتریس چرخش برای مورد IERS معمولی (چرخش از قاب به قاب به فریم) باید اعمال شود.
لازم به ذکر است که EUREF TWG استفاده از ETRF2005 را توصیه نمی کند، بلکه استفاده از ETRF2000 را به عنوان یک قاب معمولی ETRS89 توصیه می کند [ 26 ].
چندین فرآیند ساختاری داخلی TranSAB برای کار خود برنامه اجتناب ناپذیر است. اگر مختصات بیضی ( φ ، λ ، h ) یا صفحه ( E، N، h ) به عنوان فرمت مختصات ورودی و/یا خروجی انتخاب شوند، تبدیل مختصات اولین و/یا آخرین مرحله گردش کار برنامه خواهد بود. مختصات صفحه ( E, N, h ) به مختصات طرح ریزی سطحی برآمدگی عرضی مرکاتور اشاره دارد. پس از تبدیل مختصات، بیضی GRS80 به عنوان یک مدل ریاضی از بدن زمین استفاده می شود.
اگر در حین تبدیل، تبدیل سرعت انجام شود، تبدیل سرعت به موازات تبدیل مختصات انجام می شود.
5.1. ITRFyy ↔ ITRFxx تبدیل
تبدیل (موقعیت و سرعت، در صورت نیاز) بین هر دو راه حل ITRF را می توان با یک روش یک مرحله ای با استفاده از 14 پارامتر تبدیل اتخاذ شده از ضمیمه A EUREF TN-1 [ 28 ] و فرمول کلی ارائه شده توسط معادله (5) انجام داد. ). لازم به ذکر است که پارامترهای تبدیل بین هر دو تحقق ITRS را می توان به راحتی از پیوست فوق الذکر به دست آورد. این را می توان با تعیین تفاوت بین پارامترهای تبدیل فریم مرجع خروجی و ورودی انجام داد. پارامترهای پیوست A [ 28 ] در epoch t 0 = 2010.0 ارائه شده است. بنابراین، قبل از تبدیل، کاربر باید مقادیر را در دوره مرکزی مشاهده t منتشر کندج با استفاده از رابطه (9).
5.2. ITRFyy ↔ ETRFyy تبدیل
تبدیل موقعیت و در صورت درخواست، تبدیل سرعت بین دو فریم متناظر ITRS و ETRS89 (به عنوان مثال ITRF2000 و ETRF2000) با اعمال معادلات (7) و (8) در مورد تبدیل سرعت به دست میآیند. این نوع تبدیل را می توان با یک روش یک مرحله ای با استفاده از 14 پارامتر تبدیل انجام داد. پارامترهای تبدیل را می توان در جدول 1 در Altamimi [ 28 ] یافت و در دوره t 0 = آورده شده است.1989.0. اگر تبدیل در یک دوره متفاوت درخواست شود، پارامترهای تبدیل باید در دوره مرکزی مشاهده با استفاده از رابطه (9) منتشر شوند. پارامترها برای جهت ITRF به ETRF داده شده است. اگر تبدیل معکوس (ETRF به ITRF) فراخوانی شود، پارامترها و نرخهای تبدیل به مقادیر منفی تغییر میکنند.
5.3. ITRFyy ↔ ETRFxx تبدیل
موقعیت (و سرعت) نقاط ایستگاه را می توان بین تحقق های مختلف ITRS و ETRS89 با استفاده از 14 پارامتر تبدیل و یک روش دو مرحله ای تغییر داد. مرحله اول مستلزم تبدیل بین ITRF yy ( tc) و ITRF xx(t c ) یا ETRF yy ( tc ) و ITRF yy (tc ) است ، بسته به اینکه کدام یک فریم ورودی است. مرحله دوم با تبدیل از ITRF xx ( t c ) به ETRF xx ( t c ) یا در مورد دوم، از ITRF yy سروکار دارد.( t c ) به ITRF xx(t c ). جزئیات نحوه تبدیل در این مورد به ترتیب در بخش 5.2 و بخش 5.3 ذکر شده است.
5.4. ETRFyy ↔ ETRFxx تبدیل
این شکل از دگرگونی پیچیده ترین شکل است. این روش شامل دو مرحله است که مرحله دوم به دو مرحله دیگر تقسیم می شود. اولین مرحله مربوط به تبدیل ETRF yy ( t c ) به ITRF yy ( t c ) است که در آن جزئیات را می توان در بخش 5.2 یافت . در مرحله دوم، ابتدا باید تبدیل از ITRF yy ( t c ) به ITRF xx(t c ) اعمال شود. پس از آن، در آخرین مرحله، تبدیل از ITRF xx ( t c ) به ETRF xx ( t c)) انجام می شود. دستورالعمل های این عملیات در بخش 5.1 و بخش 5.2 توضیح داده شده است. دستورالعمل های پردازش ذکر شده در این بخش فرعی را می توان برای هر دو حالت تبدیل موقعیت و تبدیل سرعت اعمال کرد.
5.5. تبدیل مختصات زمانی
اگر کاربر به تبدیل سرعت نیاز داشته باشد، تبدیل مختصات زمانی آخرین فرآیند گردش کار TranSAB است. این تبدیل به دلیل جابجایی موقعیت نقطه رخ می دهد. یک فرمول کلی در معادله زیر [ 42 ] ارائه شده است:
که در آن X ( t ) بردار موقعیت نقطه در چارچوب مرجع است که در دوره t بیان شده است ( t دوره خروجی است). X ( tc ) یک بردار موقعیت در چارچوب مرجع در دوره مرکزی tc مشاهده است . V یک بردار سرعت در چارچوب مرجع مربوطه است. X ( tc ) و V با شکلهای تبدیلی که قبلاً توضیح داده شد به دست میآیند و t -tc یک استنتاج دورهای است.
طرح 1 و طرح 2 گردش کار تبدیل برنامه TranSAB را نشان می دهد. طرح 1 مربوط به تبدیل بین دو تحقق مختلف ETRS89 است که در آن سرعت ها گنجانده نشده است، در اینجا به عنوان ETRF yy و ETRF xx نشان داده می شود ، در حالی که طرح 2 تبدیل متناظر را اما با سرعت های موجود در مدل تبدیل نشان می دهد.
6. اجرای برنامه کاربردی در دنیای واقعی-تغییر مختصات زمانی
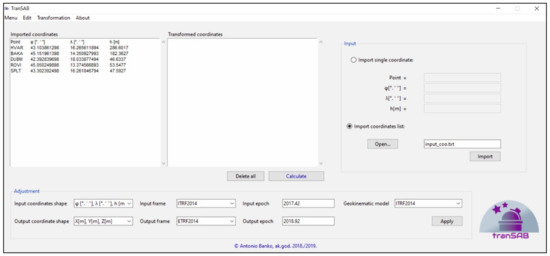
فرض کنید که کاربر مجموعه ای از مختصات بیضی شکل در فرمت درجه، دقیقه و ثانیه (DMS) دارد، همانطور که در شکل 3 نشان داده شده است. مختصات مربوط به آخرین فریم ITRS ITRF2014 داده شده است و در دوره 2017.42 بیان شده است. خروجی مورد نظر مختصات دکارتی در راه حل ETRF2014 و در دوره 2018.92 است. با توجه به راهنمای ابزار ذکر شده در بخش 4 ، سرعت ها با استفاده از یک مدل سینماتیک مرتبط – ITRF2014 محاسبه می شوند. پارامترهای ورودی و خروجی در شکل 3 نشان داده شده است.
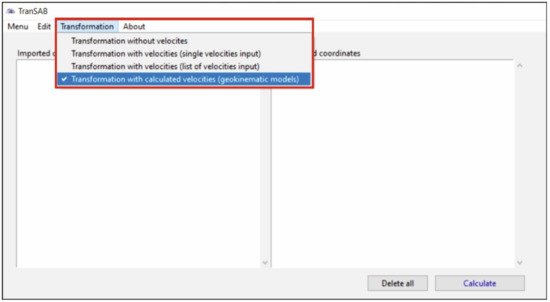
شکل 4 یک منوی کشویی با انواع تغییر شکل ممکن را نشان می دهد. اولین گزینه مربوط به تبدیل بدون توجه به صفحات تکتونیکی است. بنابراین، بدون سرعت. گزینه دوم و سوم به تبدیل با سرعت اشاره دارد که در آن سرعت ها به صورت دستی (به عنوان یک نقطه یا به عنوان یک مجموعه داده) درج می شوند. آخرین گزینه، گزینه انتخاب شده در شکل 3 ، مربوط به تبدیل با سرعت است که در آن سرعت ها با استفاده از مدل های سینماتیکی محاسبه می شوند. اگر کاربر آخرین گزینه را انتخاب کند، این مدل تبدیل باید قبل از تنظیم پارامترها و وارد کردن مختصات انتخاب شود.
پس از انتخاب نوع تبدیل، کاربر می تواند به تنظیم پارامتر و درج مختصات دسترسی داشته باشد. شکل 5 رابط کاربری گرافیکی TranSAB را نشان می دهد که در آن پارامترها تنظیم می شوند و مختصات وارد شده، به دنبال رویکرد فوق الذکر.
در شکل 6 می توان متوجه شد که سرعت ها در زیر بخش ‘مختصات وارداتی’ نمایش داده شده اند. این سرعتها به آنهایی اشاره دارند که با استفاده از مدل سینماتیکی محاسبه میشوند (در این مورد، مدل سینماتیکی مدل حرکت صفحه ITRF2014 است) قبل از اینکه تبدیل رخ دهد. بخش ‘مختصات تبدیل شده’ در شکل 6 موقعیت (مختصات دکارتی ( X, Y, Z ) با واحد متر) و سرعت ( V X , V Y , V Z با واحد متر در سال) ایستگاه های محاسبه شده (تبدیل شده) را نشان می دهد. با استفاده از فرمول ها، رویه ها و توصیه های ارائه شده در این مقاله.
پس از تکمیل تبدیل، TranSAB به کاربران این امکان را می دهد که مختصات محاسبه شده را در قالب *.txt برای فرآیندهای بیشتر یا اهداف دیگر ذخیره کنند.
7. بحث
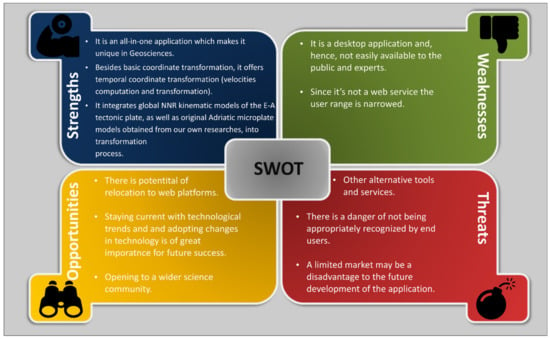
برنامه TranSAB علاوه بر رابط کاربری گرافیکی بصری، آسان و کاربرپسند خود، یک راه حل همه کاره ارائه می دهد. یک راه حل همه کاره به معنای امکان تغییرات مختصات زمانی است که برنامه ها و خدمات موجود ارائه نمی دهند. سرعت ایستگاه با استفاده از مدلهای سینماتیکی NNR صفحه تکتونیکی اوراسیا، که قبلاً در مدل تبدیل پیادهسازی شدهاند، محاسبه میشوند. امکان دیگری برای محاسبه سرعت ایستگاه را می توان با استفاده از مدل سینماتیکی مناسب ریز صفحه آدریاتیک (به عنوان بخشی از صفحه تکتونیکی اوراسیا) که از تحقیقات خود ما به دست آمده است، تحقق بخشید [ 8 ، 9 ، 10 ]]. از طرف دیگر، از آنجایی که این یک برنامه دسکتاپ است و نه یک وب سرویس، محدوده کاربری و در دسترس بودن آن برای دیگران محدود است، ناگفته نماند که مانع بزرگی برای توسعه اپلیکیشن می تواند ابزارها و سرویس های جایگزین (یعنی رقبا) باشد. قبلاً به خوبی شناخته شده اند. کاربرانی که برنامه و ویژگی های آن را نپذیرند ممکن است توسعه آن را کند کرده و بازار استفاده از آن را نیز محدود کنند. با این وجود، پتانسیل قابل توجهی برای دور زدن این موانع وجود دارد. به عنوان مثال، جابجایی برنامه به پلتفرمهای وب و در جریان بودن با روندهای فناوری، و همچنین پیشبینی مناسب و اتخاذ تغییرات فناوری، میتواند مخاطبان بیشتری را جذب کرده و جامعه کاربران را گسترش دهد. شکل 7 تجزیه و تحلیل SWOT (نقاط قوت، ضعف، فرصت ها، تهدیدها) را نشان می دهد.
پیشرفتهای مداوم در تکنیکهای اندازهگیری مبتنی بر ماهواره به تدریج تأثیر قابلتوجهی بر «سه ستون» ژئودزی میگذارد. در نتیجه، چارچوبهای مرجع و مدلهای سینماتیک دقیقتر تعریف میشوند. با توجه به تحققهای جدید و دقیقتر چارچوب مرجع، نیاز به تحول هماهنگ بین آنها هر روز بیشتر میشود. علاوه بر این، این واقعیت که نقاط روی سطح زمین ساکن نیستند، بلکه تابعی از زمان به دلیل حرکات صفحه تکتونیکی هستند، نیاز به تبدیل مختصات زمانی سریعتر و سادهتر را افزایش میدهد. TranSAB، یک برنامه کاربردی دسکتاپ مستقل، راه حل هایی را برای مشکلات ذکر شده در بالا ارائه می دهد. این برنامه به دنبال توصیه های کلی ارائه شده توسط EUREF TN و با استفاده از ابزار آنلاین EUREF برای تبدیل مختصات (موقعیت و سرعت) توسعه یافته است. تاکید ویژهای بر یکپارچهسازی تحولات مختصات، جایی که EUREF TN به عنوان منبعی برای اتخاذ پروتکلهای تبدیل، همراه با مدلهای سینماتیکی جهانی NNR از حرکات صفحه لیتوسفر بود، قرار گرفت.
برنامه TranSAB با هدف پاسخگویی به نیازهای همه کسانی که با پردازش و تنظیم اندازهگیریهای GNSS و تبدیل (زمانی) نتایج بهدستآمده بین دو چارچوب مرجع مختلف سروکار دارند، ساخته شده است. این یک راه حل منحصر به فرد برای تبدیل مختصات در ژئودزی و ژئوانفورماتیک است زیرا از روش های تبدیل مختصات EUREF و جابجایی مختصات سالانه ناشی از تکتونیک صفحه با انتخاب مدل سینماتیکی مناسب NNR برای محاسبه سرعت ایستگاه با مختصات آنها استفاده می کند. این یک برنامه کاربردی کاربرپسند با رابط کاربری گرافیکی بصری است که برای همه کاربرانی که با داده های پردازش شده GNSS سروکار دارند و همچنین کسانی که می خواهند مختصات فضایی را در یک چارچوب مرجع مختصات مناسب بیان کنند در نظر گرفته شده است. ایجاد یک برنامه مستقل همه کاره اولین قدم بود زیرا آسان تر از ایجاد یک برنامه وب بود. گام دوم فراهم کردن دسترسی رایگان برای همه طرف های ذینفع و جامعه علمی گسترده تر است. و مرحله سوم، اگر علاقه کافی وجود داشته باشد، مطمئناً یک برنامه وب خواهد بود. ما بر این باوریم که توسعه برنامه TranSAB برای علوم زمین و فراتر از آن از اهمیت زیادی برخوردار است.









بدون دیدگاه