

کلید واژه ها:
مدل سازی شهری ; فیلتر مش ; تشخیص شکل ؛ ساده سازی مش
1. مقدمه
2. کارهای مرتبط
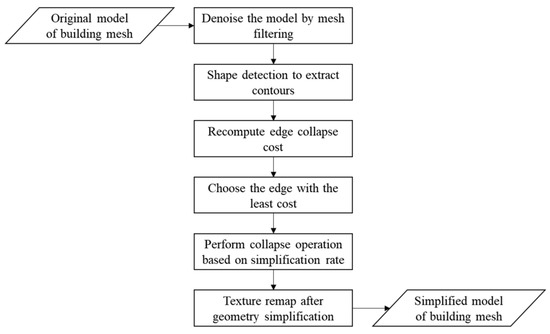
3. روش شناسی
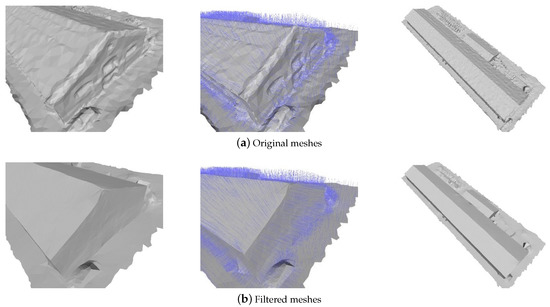
3.1. فیلتر مش
3.1.1. فیلتر معمولی صورت
صورت مثلثی داده شده است fمن�من، نرمال اولیه به صورت زیر فرموله می شود:
جایی که v1�1، v2�2، و v3�3رئوس هستند fمن�من. مخرج نرمال را عادی می کند.
پس از مقداردهی اولیه هر صورت عادی، یک فیلتر دوطرفه اعمال می کنیم تا جهت آن را اصلاح کنیم. مشابه فیلتر تصویر دوطرفه، فیلتر مش دوطرفه شامل دو نوع وزن است: (1) وزنهای مبتنی بر فاصله فضایی αfمنfj��من��; (2) وزنه های معمولی مبتنی بر مجاورت βfمنfj��من��[ 1 ]. دو تابع وزن را می توان مشابه تابع گاوسی تعریف کرد:
جایی که فاصله فضایی بین دو وجه است fمن�منو fj��با فاصله اقلیدسی بین مرکز آنها محاسبه می شود جfمن��منو جfj���، nfمن��منو nfj���نشان دهنده نرمال دو چهره است، σدمن _�دمنسواریانس فاصله اقلیدسی است و θ�یک آستانه زاویه مشخص شده توسط کاربر است. از نظر تجربی، θ�معمولا تنظیم می شود 20 درجه20درجهبه 30 درجه30درجه. تعاریف نشان می دهد که هر دو αfمنfj�����و βfمنfj�����توابع غیر منفی هستند. ارزش αfمنfj�����با افزایش فاصله فضایی بین دو وجه کاهش می یابد. ارزش βfمنfj�����زمانی که جهت دو نرمال به طور قابل توجهی متفاوت باشد، کوچک است. یعنی چهره هایی با وزن کم تأثیر ضعیفی روی یکدیگر دارند.
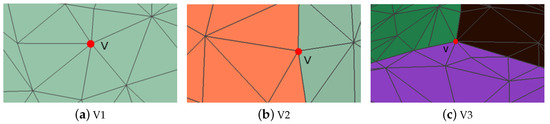
هنگام جستوجوی همسایگی یک چهره، باید از چهرههای ناحیه چین اجتناب کنیم [ 1 ]. در این مقاله، همسایگی را در یک طرح تطبیقی پرس و جو می کنیم. برای یک چهره fمن��، همسایگی آن باید دو معیار را برآورده کند: (1) دارای رئوس مشترک با صورت است fمن��. (2) زاویه بین جهت طبیعی صورت آنها کوچکتر از θ�. صورت را اختصاص می دهیم fمن��یک عادی جدید nfمن^���^:
جایی که نfj���مجموعه همسایگی صورت را نشان می دهد fمن��، آfمن���ناحیه صورت است fمن��و نرمال جدید nfمن^���^با یک عامل عادی می شود wمن��. برای مدل های مش مثلثی که اندازه مش آنها یکسان نیست، همسایگی توپولوژیکی بهتر از همسایگی مبتنی بر فاصله در حین پرس و جو عمل می کند زیرا فقط شامل چهره هایی با جهت گیری های عادی مشابه است [ 1 ]. این مرحله با حفظ ویژگیهای تیز، نرمی نرمالهای صورت را درک میکند. از طریق چند تکرار فیلتر، نرمال های صورت در همان مناطق مسطح تقریباً همگن خواهند بود.
3.1.2. به روز رسانی موقعیت راس
موقعیت های رأس مدل ها باید با نرمال های چهره جدید به روز شوند. تاوبین و همکاران [ 35 ] موقعیتهای راس بهطور مکرر با استفاده از روش نزول گرادیان بر اساس این ویژگی که جهتهای نرمالهای صورت متعامد به سه بردار لبه هستند، بهروزرسانی میشوند. با این حال، الگوریتم عملی نیست. سان و همکاران [ 36 ] الگوریتم تکراری دیگری با کارایی بالاتر و اثرات بهتر پیشنهاد کرد. استراتژی تکرار شونده به صورت زیر عمل می کند:
جایی که نvمن( ف)����مجموعه صورت همسایگی یک حلقه ای رأس است vمن�من، جfک���مرکز صورت است fک��، و nfک^���^نرمال فیلتر شده صورت است fک��.
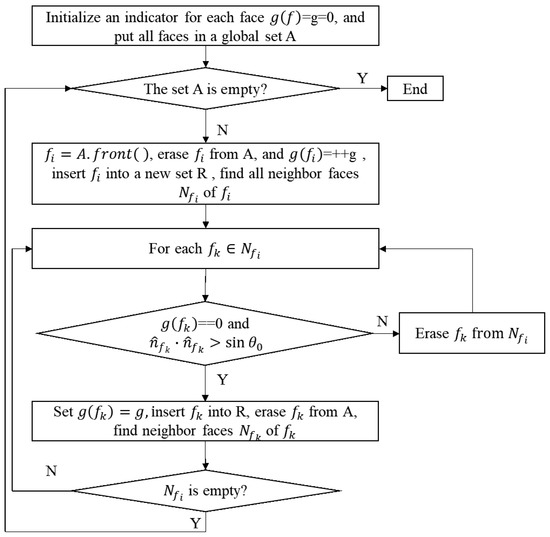
3.2. تشخیص شکل
3.2.1. منطقه در حال رشد
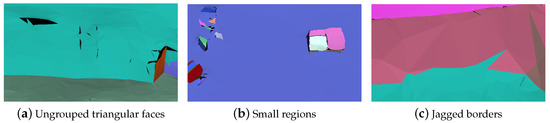
3.2.2. بهینه سازی منطقه
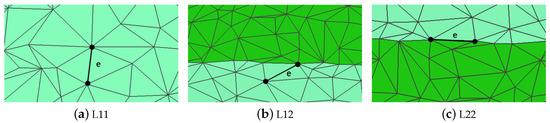
3.3. ساده سازی محدودیت
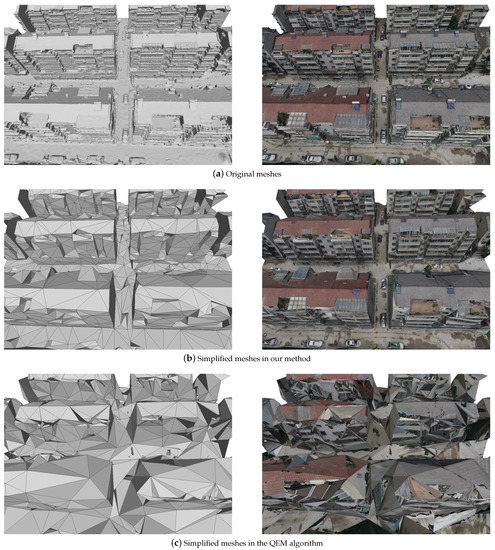
اصل اساسی الگوریتم edge-collapse ادغام دو راس یک یال در یک راس و حذف لبه و دو وجه مثلثی مجاور آن است. الگوریتم مش ورودی را با توجه به تابع هزینه از بین میبرد تا زمانی که به نرخ سادهسازی مورد نظر برسد. برای تابع هزینه، الگوریتم QEM [ 7 ] یک روش کلاسیک برای محاسبه هزینه فروپاشی است که از مجموع فاصله از یک نقطه تا وجوه مجاور آن به عنوان متریک خطا استفاده می کند. این الگوریتم به دلیل کارایی و کیفیت ساده سازی به طور گسترده مورد استفاده قرار گرفته است. در الگوریتم QEM اصلی، هر رأس با یک ماتریس چهارگانه مرتبط است سv��. چهره داده شده است p = [ a , b , c , d]�=�,�,�,�، مجذور فاصله از یک راس v = [ x ، y، z, 1 ]�=ایکس،�،�،1به صورت است:
سپس مجموع مجذور فاصله راس v تا تمام وجوه مجاور برابر است با:
برای یک لبه ل (vمن،vj)ل�من،��، ماتریس چهارگانه با جمع ربع های دو رأس آن محاسبه می شود، به عنوان مثال، سvمن+سvjس�من+س��. در نهایت تابع هزینه لبه را تعریف می کنیم ل (vمن،vj)ل�من،��مانند:
جایی که v¯�¯یک راس جدید است.
3.4. نقشه برداری مجدد بافت
4. نتایج و بحث
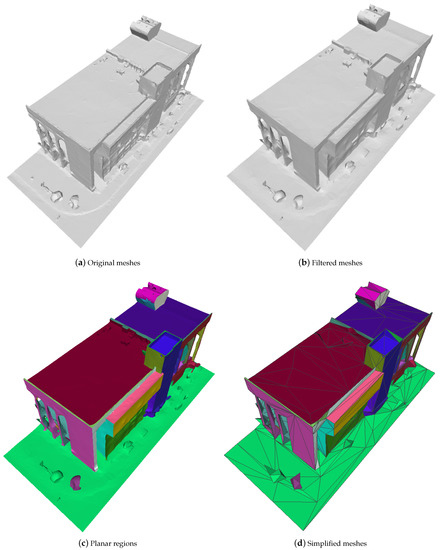
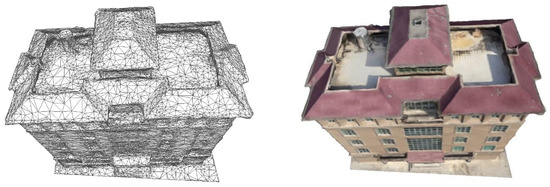
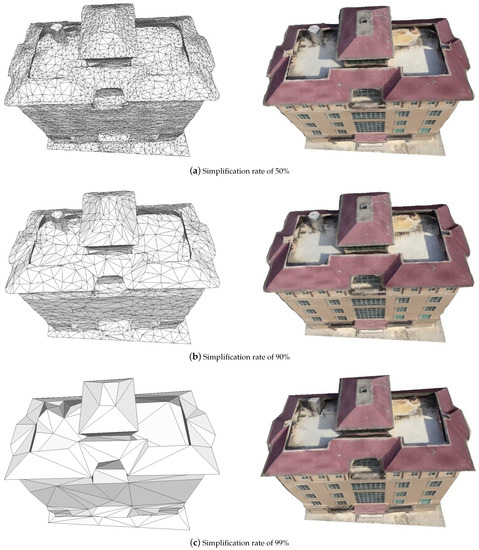
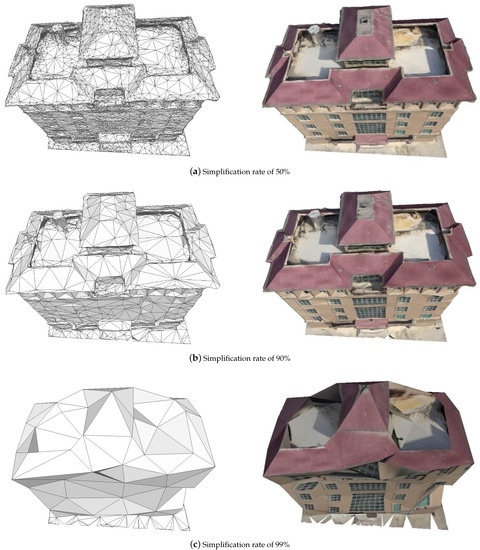
4.1. نتایج ساده سازی
4.2. تحلیل کیفی و کمی
4.3. تحلیل جامع
5. نتیجه گیری ها
منابع
- لی، ام. Nan, L. ساده سازی مش سه بعدی با حفظ ویژگی برای ساختمان های شهری. ISPRS J. Photogramm. Remote Sens. 2021 , 173 , 135–150. [ Google Scholar ] [ CrossRef ]
- بیلجکی، اف. لدوکس، اچ. استوتر، جی. ژائو، جی. رسمی سازی سطح جزئیات در مدل سازی سه بعدی شهر. محاسبه کنید. محیط زیست سیستم شهری 2014 ، 48 ، 1-15. [ Google Scholar ] [ CrossRef ]
- مدلهای هندسی سلسله مراتبی کلارک، JH برای الگوریتمهای سطح مرئی. اشتراک. ACM 1976 ، 19 ، 547-554. [ Google Scholar ] [ CrossRef ]
- پوتامیاس، RA; پلومپیس، اس. Zafeiriou، S. ساده سازی مش عصبی. در مجموعه مقالات کنفرانس IEEE/CVF در مورد دید رایانه و تشخیص الگو، ونکوور، BC، کانادا، 18 تا 24 ژوئن 2022؛ صفحات 18583-18592. [ Google Scholar ]
- سالیناس، دی. لافارژ، اف. Alliez، P. از بین بردن شبکه آگاه از ساختار. محاسبه کنید. نمودار. انجمن 2015 ، 34 ، 211-227. [ Google Scholar ] [ CrossRef ]
- چانگ، آر. بوتکیویچ، تی. زیمکیویچ، سی. وارتل، ز. پولارد، ن. Ribarsky, W. سادهسازی خوانا مدلهای شهری بافتدار. محاسبات IEEE. نمودار. Appl. 2008 ، 28 ، 27-36. [ Google Scholar ] [ CrossRef ]
- گارلند، ام. هکبرت، ساده سازی سطح PS با استفاده از معیارهای خطای چهارگانه. در مجموعه مقالات بیست و چهارمین کنفرانس سالانه گرافیک کامپیوتری و تکنیک های تعاملی، لس آنجلس، کالیفرنیا، ایالات متحده آمریکا، 3 تا 8 اوت 1997. ص 209-216. [ Google Scholar ]
- گارلند، ام. هکبرت، PS ساده سازی سطوح با رنگ و بافت با استفاده از معیارهای خطای چهارگانه. در Proceedings of the Visualization’98 (Cat. No.98CB36276)، Research Triangle Park, NC, USA, 18-23 اکتبر 1998; صص 263-269. [ Google Scholar ]
- Hoppe, H. متریک چهارگانه جدید برای ساده کردن مش ها با ویژگی های ظاهری. در Proceedings of the Visualization’99 (Cat. No. 99CB37067)، سانفرانسیسکو، کالیفرنیا، ایالات متحده آمریکا، 24–29 اکتبر 1999; ص 59-510. [ Google Scholar ]
- لیو، ایکس. لین، ال. وو، جی. وانگ، دبلیو. یین، بی. Wang, CC تولید مدلهای قاب سیمی خودنگهدار پراکنده برای چاپ سه بعدی با استفاده از سادهسازی مش. نمودار. مدل. 2018 ، 98 ، 14-23. [ Google Scholar ] [ CrossRef ]
- شرودر، WJ; زارگه، ج.ا. لورنسن، WE حذف مش های مثلثی. در مجموعه مقالات نوزدهمین کنفرانس سالانه گرافیک کامپیوتری و تکنیک های تعاملی، شیکاگو، IL، ایالات متحده آمریکا، 26-31 ژوئیه 1992; صص 65-70. [ Google Scholar ]
- Renze، KJ; Oliver, JH تعمیم یافته بی ساختار. محاسبات IEEE. نمودار. Appl. 1996 ، 16 ، 24-32. [ Google Scholar ] [ CrossRef ]
- Rossignac، J.; Borrel, P. تقریب های سه بعدی با وضوح چندگانه برای رندر صحنه های پیچیده. در مدلسازی در گرافیک کامپیوتری ; Springer: برلین/هایدلبرگ، آلمان، 1993; صص 455-465. [ Google Scholar ]
- کم، KL; سادهسازی مدل Tan، TS با استفاده از خوشهبندی راس. در مجموعه مقالات سمپوزیوم 1997 در زمینه گرافیک سه بعدی تعاملی، پراویدنس، RI، ایالات متحده آمریکا، 27-30 آوریل 1997; صص 75-81. [ Google Scholar ]
- لونسبری، م. DeRose، TD; وارن، J. تجزیه و تحلیل چند وضوح برای سطوح از نوع توپولوژیکی دلخواه. ACM Trans. نمودار. ToG 1997 ، 16 ، 34-73. [ Google Scholar ] [ CrossRef ]
- گوسکوف، آی. ویدیمچه، ک. سولدنز، دبلیو. شرودر، P. مش های معمولی. در مجموعه مقالات بیست و هفتمین کنفرانس سالانه گرافیک کامپیوتری و تکنیک های تعاملی، نیواورلئان، لس آنجلس، ایالات متحده آمریکا، 23 تا 28 ژوئیه 2000; صص 95-102. [ Google Scholar ]
- هوپ، اچ. دروز، تی. دوشان، تی. مک دونالد، جی. Stuetzle, W. Mesh بهینه سازی. در مجموعه مقالات بیستمین کنفرانس سالانه گرافیک کامپیوتری و تکنیکهای تعاملی، آناهیم کالیفرنیا، ایالات متحده آمریکا، 2 تا 6 اوت 1993. صص 19-26. [ Google Scholar ]
- هوپ، اچ. دروز، تی. دوشان، تی. مک دونالد، جی. Stuetzle, W. بازسازی سطح از نقاط سازمان نیافته. در مجموعه مقالات نوزدهمین کنفرانس سالانه گرافیک کامپیوتری و تکنیک های تعاملی، شیکاگو، IL، ایالات متحده آمریکا، 26-31 ژوئیه 1992; ص 71-78. [ Google Scholar ]
- کیم، اس. جئونگ، دبلیو. تولید کیم، سی. LOD با متریک خطای انحنای گسسته. در مجموعه مقالات کنفرانس دو ملیتی کره اسرائیل، سئول، کره، 10 تا 12 اکتبر 1999; صص 97-104. [ Google Scholar ]
- کیم، اس جی. کیم، سیچ. لوین، دی. ساده سازی سطح با استفاده از یک هنجار انحنای گسسته. محاسبه کنید. نمودار. 2002 ، 26 ، 657-663. [ Google Scholar ] [ CrossRef ]
- کاستلو، پی. اسبرت، ام. چوور، م. Feixas، M. ساده سازی دیدگاه محور با استفاده از اطلاعات متقابل. محاسبه کنید. نمودار. 2008 ، 32 ، 451-463. [ Google Scholar ] [ CrossRef ]
- لسکوات، تی. لیو، HTD؛ تیری، جی.ام. جاکوبسون، ا. بوبکور، تی. Ovsjanikov، M. ساده سازی مش طیفی. محاسبه کنید. نمودار. انجمن 2020 ، 39 ، 315–324. [ Google Scholar ] [ CrossRef ]
- Hoppe, H. مش های پیشرو. در مجموعه مقالات بیست و سومین کنفرانس سالانه گرافیک کامپیوتری و تکنیک های تعاملی، نیواورلئان، لس آنجلس، ایالات متحده آمریکا، 4 تا 9 اوت 1996. صص 99-108. [ Google Scholar ]
- Hoppe, H. پالایش مشهای پیشرونده وابسته به نمایش. در مجموعه مقالات بیست و چهارمین کنفرانس سالانه گرافیک کامپیوتری و تکنیک های تعاملی، لس آنجلس، کالیفرنیا، ایالات متحده آمریکا، 3 تا 8 اوت 1997. ص 189-198. [ Google Scholar ]
- لیندستروم، پی. ترک، جی. ساده سازی تصویر محور. ACM Trans. نمودار. (ToG) 2000 ، 19 ، 204-241. [ Google Scholar ] [ CrossRef ]
- پاپاژورگیو، ا. Platis, N. ساده سازی مش مثلثی در GPU. Vis. محاسبه کنید. 2015 ، 31 ، 235-244. [ Google Scholar ] [ CrossRef ]
- لی، اچ. کیونگ، MH ساده سازی مش موازی با استفاده از فروپاشی درخت تعبیه شده. Vis. محاسبه کنید. 2016 ، 32 ، 967-976. [ Google Scholar ] [ CrossRef ]
- نان، ال. Wonka, P. Polyfit: بازسازی سطح چند ضلعی از ابرهای نقطه ای. در مجموعه مقالات کنفرانس بین المللی IEEE در بینایی کامپیوتر، ونیز، ایتالیا، 22 تا 29 اکتبر 2017؛ صص 2353-2361. [ Google Scholar ]
- او، جی. گو، ایکس. تان، جی. تانگ، ام. وانگ، سی. روش سادهسازی حفظ ظاهر برای مدلهای ساختمانهای سه بعدی پیچیده. ترانس. GIS 2019 ، 23 ، 275-293. [ Google Scholar ] [ CrossRef ]
- او، جی. چن، بی. تان، جی. ژائو، کیو. Ge, R. روش ساده سازی مدل ساختمانی سه بعدی با در نظر گرفتن مش مدل و ساختار ساختمان. ترانس. GIS 2022 ، 26 ، 1182-1203. [ Google Scholar ] [ CrossRef ]
- لی، کیو. سان، ایکس. یانگ، بی. جیانگ، اس. ساده سازی ساختار هندسی مدل های ساختمانی سه بعدی. ISPRS J. Photogramm. Remote Sens. 2013 ، 84 ، 100-113. [ Google Scholar ] [ CrossRef ]
- وانگ، بی. وو، جی. ژائو، کیو. لی، ی. گائو، ی. She, J. روش ساده سازی حفظ توپولوژی برای مدل های ساختمان سه بعدی. ISPRS Int. J. Geo-Inf. 2021 ، 10 ، 422. [ Google Scholar ] [ CrossRef ]
- بوچ، ام. کوبلت، ال. پالی، ام. آلیز، پی. Lévy، B. پردازش مش چند ضلعی ; CRC Press: Boca Raton، FL، USA، 2010. [ Google Scholar ]
- ژنگ، ی. فو، اچ. Au، OKC; Tai, CL فیلتر معمولی دو طرفه برای حذف صدای مش. IEEE Trans. Vis. محاسبه کنید. نمودار. 2010 ، 17 ، 1521-1530. [ Google Scholar ] [ CrossRef ]
- Taubin، G. فیلتر شبکه ناهمسانگرد خطی. در گزارش تحقیقاتی IBM ; مرکز تحقیقات IBM TJ Watson: Yorktown Heights, NY, USA, 2001; جلد 1. [ Google Scholar ]
- سان، ایکس. Rosin, PL; مارتین، آر. Langbein، F. حذف سریع و مؤثر مش با حفظ ویژگی. IEEE Trans. Vis. محاسبه کنید. نمودار. 2007 ، 13 ، 925-938. [ Google Scholar ] [ CrossRef ]
- لافارژ، اف. مالت، سی. ایجاد مدلهای شهر در مقیاس بزرگ از ابرهای نقطه سه بعدی: رویکردی قوی با نمایش ترکیبی. بین المللی جی. کامپیوتر. Vis. 2012 ، 99 ، 69-85. [ Google Scholar ] [ CrossRef ]
- هوانگ، ایکس. ژانگ، اف. Gao, Y. نوعی روش شکل دهی خودکار مدل LOD رنگی که بر اساس بلوک تجزیه می شود. ثبت اختراع چین CN109118588A، 25 سپتامبر 2018. [ Google Scholar ]




بدون دیدگاه