

کلید واژه ها:
یادگیری عمیق ؛ پیش بینی جریان مسافر ; مدل هیبریدی ; وابستگی مکانی – زمانی
1. مقدمه
- (1)
-
اکثر روشهای مبتنی بر GCN از پیشرفتهای ماتریس مجاور در پیشبینی جریان مسافران مترو چشمپوشی میکنند. اولاً، آنها تأثیر فضایی واردات و صادرات ایستگاه های مترو را نادیده می گیرند. ثانیاً، آنها تأثیر ایستگاه های جهانی بر ایستگاه های خاص را نادیده می گیرند.
- (2)
-
اکثر روش ها بر اساس یک مدل واحد برای گرفتن وابستگی زمانی هستند، مانند مدل RNN و تغییرات آن، یا مدل ترانسفورماتور [ 54 ]. با این حال، این مدلها هنوز محدودیتهایی در گرفتن تمام ویژگیهای زمانی دارند. مدل RNN و تغییرات آن فقط بر روی ثبت ویژگیهای زمانی محلی تمرکز دارد، در حالی که مدل ترانسفورماتور فقط بر ضبط ویژگیهای زمانی جهانی تمرکز دارد.
- (3)
-
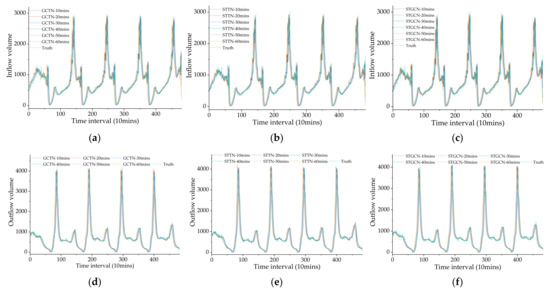
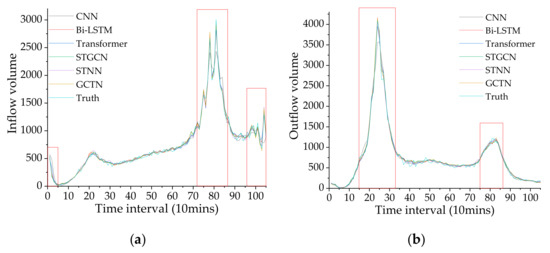
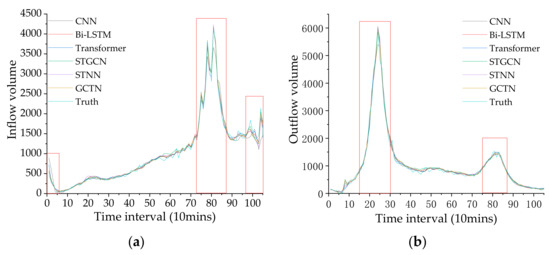
پیشبینی ترافیک معمولاً به دو مقیاس طبقهبندی میشود که کوتاهمدت (≤30 دقیقه) و بلندمدت (≥30 دقیقه) [ 44 ، 53 ] است. در حال حاضر، پیشبینی جریان مسافران مترو عمدتاً یک پیشبینی کوتاهمدت است. با این حال، پیشبینی جریان درازمدت نیز بسیار مهم است که میتواند آمادگی کافی برای برنامهریزی عملیات را فراهم کند.
-
از طریق بهبود در ماتریس مجاور و GCN، بیان ساختار فضایی در شبکه مترو آشکارتر است. علاوه بر این، ما میتوانیم ویژگی ایستگاه و تأثیر ایستگاههای جهانی را بهتر توصیف کنیم، که جذب ویژگیهای فضایی را بهبود میبخشد.
-
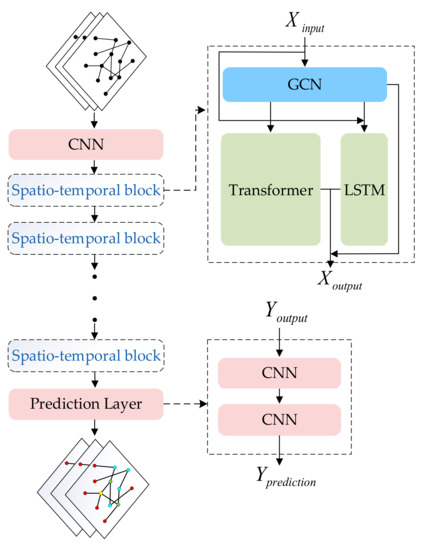
مدلسازی جامع وابستگی مکانی-زمانی ما یک ساختار بلوک مکانی-زمانی طراحی میکنیم، و هدف این است که ویژگیهای استخراجشده توسط شبکه را بهطور یکپارچه مدلسازی کنیم.
-
یک بهبود در مدل ترانسفورماتور انجام شده است. CNN برای استخراج و ترکیب ویژگی های میانی اضافه شده است که می تواند به تجزیه و تحلیل بهتر داده های سری زمانی مترو کمک کند.
-
انگیزه پشت GCTN پیش بینی دقیق جریان طولانی مدت مسافران مترو است. پیشبینی جریان مسافر میتواند به اعزام مترو کمک کند و میتواند به شهروندان در برنامهریزی مسیرها و زمانبندی زمان کمک کند. علاوه بر این، می تواند به کاهش فشار ترافیک و ساختن شهری سالم، سبز و پایدار کمک کند.
2. تعریف مسئله
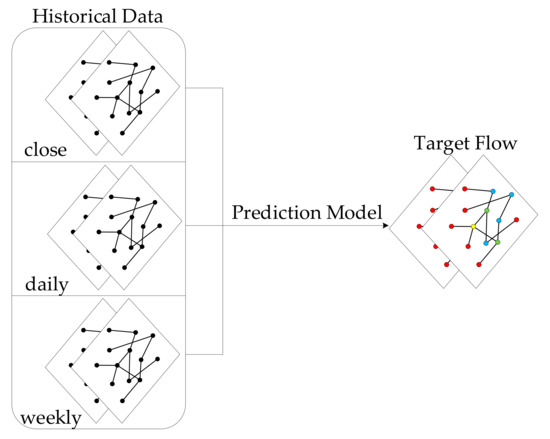
پیشبینی جریان مسافران مترو یک مشکل پیشبینی مکانی و زمانی است. اول از همه، ساختار فضایی در مترو را می توان به عنوان یک ساختار نمودار بیان کرد، جی=V، E، آ. Vمجموعه ای از گره های N است که ایستگاه های مترو را نشان می دهد. Eلبه بین ایستگاه های مترو است. علاوه بر این، آ∈ آرن×نماتریس مجاور بر اساس اتصال و فاصله اقلیدسی بین ایستگاه های مترو است. علاوه بر این، جریان مسافری مترو نه تنها تحت تأثیر ساختار فضایی شبکه مترو، بلکه تحت تأثیر جریان مسافر در دورههای تاریخی قرار میگیرد. بنابراین، مسئله پیشبینی را میتوان با رابطه زیر (1) بیان کرد:
جایی که هدف∈آرن×تی”×2جریان پیشبینیشده مسافران مترو ایستگاههای N در زمان T است. را ایکس∈آرن×تی×2جریان تاریخی مسافران مترو در N ایستگاه در زمان T است. را هدفو ایکسهر دو شامل حجم ورودی و حجم خروجی هستند. افپیش بینی مدل یادگیری عمیق است. جیساختار نمودار شبکه مترو است و دبلیوپارامتر قابل یادگیری است.
3. توسعه مدل
3.1. معماری کلی
3.2. مدلسازی وابستگی فضایی
برای افزایش دقت و ثبات پیشبینی، ماتریس مجاور سنتی را بهبود میبخشیم. در ایستگاه مترو واردات و صادرات زیادی وجود دارد و واردات و صادرات مختلف ممکن است به هم نزدیک نباشد. مردم تمایل دارند مسیر واردات یا صادرات را به محل یا مقصد خود نزدیکتر کنند. علاوه بر این، تعداد متفاوت واردات و صادرات در ایستگاههای مترو ممکن است تأثیرات متفاوتی بر جریان مسافران مترو داشته باشد. بنابراین تاثیر فضایی واردات و صادرات بر ایستگاه قابل تامل است. ما واردات و صادرات در ایستگاه مترو را به عنوان بخشی از ویژگی برای ساخت ماتریس مجاور در نظر می گیریم. به عبارت دیگر، ماتریس هویت با ماتریس مورب جایگزین می شود که واردات و صادرات را در ماتریس مجاور مترو ترکیب می کند. از این رو، ویژگی های خود ایستگاه افزایش یافته است. ابتدا تعداد واردات و صادرات را با توجه به مقادیر حداکثر و حداقل استاندارد می کنیم. ثانیاً، ما یک ماتریس مورب کاملاً بر اساس تعداد نرمال شده واردات و صادرات می سازیم. ما یک ماتریس مجاور ایجاد می کنیم که نشان دهنده اتصال و فاصله اقلیدسی بین ایستگاه ها است. پس از آن، ماتریس مجاور، ماتریس مورب و ماتریس هویت را با هم ترکیب می کنیم. در نهایت، خود حلقههای ماتریس مجاور ساخته میشوند که در رابطه (2) نشان داده شده است. ما یک ماتریس مجاور ایجاد می کنیم که نشان دهنده اتصال و فاصله اقلیدسی بین ایستگاه ها است. پس از آن، ماتریس مجاور، ماتریس مورب و ماتریس هویت را با هم ترکیب می کنیم. در نهایت، خود حلقههای ماتریس مجاور ساخته میشوند که در رابطه (2) نشان داده شده است. ما یک ماتریس مجاور ایجاد می کنیم که نشان دهنده اتصال و فاصله اقلیدسی بین ایستگاه ها است. پس از آن، ماتریس مجاور، ماتریس مورب و ماتریس هویت را با هم ترکیب می کنیم. در نهایت، خود حلقههای ماتریس مجاور ساخته میشوند که در رابطه (2) نشان داده شده است.
جایی که آ˜ماتریس مجاور را با حلقه های خود نشان می دهد. A نشان دهنده ماتریس مجاور است که بر اساس اتصال و فاصله اقلیدسی ایجاد شده است. منnیک ماتریس هویت است و منهیک ماتریس مورب است که از مقدار نرمال شده واردات و صادرات ساخته شده است.
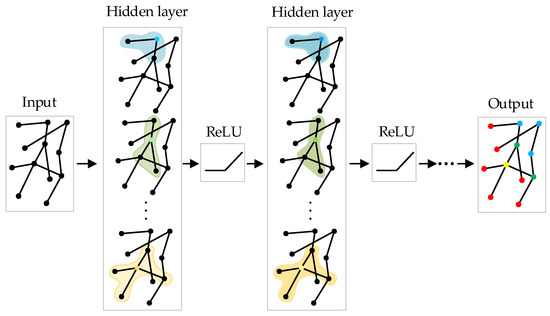
در GCN، اطلاعات گره های مجاور با ماتریس مجاور از پیش تعریف شده تجمیع می شود. پس از آن، ویژگی های فضایی بین گره ها با وزن آموخته شده به دست می آید. مدل GCN را می توان از طریق پشته لایه های کانولوشن گراف ایجاد کرد. ما ویژگی های گره آگاه از ساختار را از تقریب چند جمله ای Chebyshev یاد می گیریم که می تواند وابستگی فضایی را مدل کند. داده های تاریخی هستند ایکسمنnپتوتی∈آرتی×ن×اف، جایی که T نشان دهنده مراحل زمانی ویژگی های ورودی، N نشان دهنده تعداد گره ها، و F نشان دهنده تعداد ویژگی های ورودی است. ویژگی های فضایی گرفته شده عبارتند از ایکسس∈آرتی×ن×اف”، که در آن F ′ تعداد ویژگی های خروجی را نشان می دهد که می تواند با معادله (3) زیر نمایش داده شود:
که σ یک تابع فعال سازی غیر خطی است و ما از تابع ReLu() استفاده می کنیم. k مرتبه چندجمله ای های چبیشف است تیک، و می توانیم آن را به عنوان اندازه میدان پذیرنده در هسته کانولوشن در نظر بگیریم. θکپارامتر وزن قابل یادگیری است. ماتریس لاپلاسی مقیاس شده است L˜=2L/λمترآایکس-منnبرای چند جمله ای چبیشف، که در آن ماتریس نرمال شده لاپلاسی L با تعریف شده است L=منn-D-1/2آ˜D-1/2، و λمترآایکسحداکثر مقادیر ویژه ماتریس L است. D ماتریس درجه است. در این مقاله از عناصر مورب سنتز شده توسط آ˜برای نشان دادن ماتریس درجه، یعنی Dمنمن=∑jآ˜منj، من، j=1،…،ن.
از آنجایی که حجم جریان ورودی و خروجی در پیشبینی جریان مسافران مترو وجود دارد، ما انتشار با ابعاد بالا از ویژگیهای جریان را از طریق CNN انجام میدهیم. لایه کانولوشن نمودار چبیشف باید اصلاح شود. اصلاح در معادله (4) نشان داده شده است:
که در آن، f تعداد کانال های ویژه است. S عملیات توجه محصول نقطه ای را در عملگر لاپلاسی نشان می دهد.
3.3. مدل سازی وابستگی زمانی
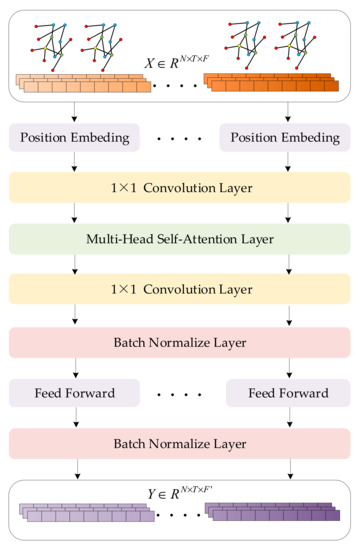
هسته ترانسفورماتور مکانیسم توجه است. ورودی مکانیسم توجه شامل پرس و جوها، کلیدها و بردارهای مقادیر است. علاوه بر این، سه بردار با ضرب ویژگی تعبیه شده به دست می آیند ایکس^با ماتریس اولیه تصادفی دبلیوq، دبلیوک، و دبلیوvبه ترتیب که در رابطه (5) نشان داده شده است. ویژگی تعبیه شده ایکس^توسط داده های ورودی و لایه جاسازی موقعیت به دست می آید. ما بیشتر ویژگیهای تعبیهشده توسط CNN را ترکیب و استخراج میکنیم. سپس، حاصل ضرب نقطه ای کوئری ها و کلیدهای داده شده را محاسبه می کنیم. ما به تقسیم حاصل ضرب نقطه بر اختلاف مربع ابعاد کلیدها ادامه می دهیم. سپس، عملیات محصول نقطه ای با مقادیر برای یادگیری وابستگی زمانی دو طرفه انجام می شود. در نهایت، از طریق تابعی که در معادله (5) نشان داده شده است، میتوان امتیاز توجه سایر موقعیتها را به دست آورد:
که در آن Q ، K ، و V نشان دهنده پرس و جوها، کلیدها و مقادیر برای تمام نقاط زمانی هستند. کتینشان دهنده ماتریس انتقال از ک. دکابعاد کلیدها را نشان می دهد. ما از مکانیسم توجه به خود استفاده می کنیم، Q = K = V ∈آرتی×دک. در مورد توجه چند سر مورد استفاده در این مقاله، Q ، K و V با توجه به تعداد سرهای توجه از طریق لایه خطی تبدیل می شوند. سپس بعد تانسور تغییر شکل می دهد. تانسورها به ترتیب محاسبه می شوند و سپس برای به دست آوردن ویژگی های نهایی جمع می شوند. این فرآیند در رابطه (6) نشان داده شده است:
که در آن n تعداد سرهای توجه و دبلیوOیک طرح خروجی خطی دیگر است. سn، Vn، و کnپرس و جوها، مقادیر و کلیدهایی هستند که توسط ماتریس های طرح ریزی سر توجه n به دست می آیند. پس از استخراج ویژگی ها از طریق مکانیسم توجه چند سر، ویژگی هایی که بیشتر از طریق CNN جمع می شوند به شبکه عصبی پیشخور وارد می شوند. سپس، ویژگی های زمانی جهانی را می توان پس از انتقال به لایه نرمال سازی دسته ای از طریق شبکه عصبی پیشخور بدست آورد.
3.4. ترکیب ویژگی زمانی و لایه پیش بینی
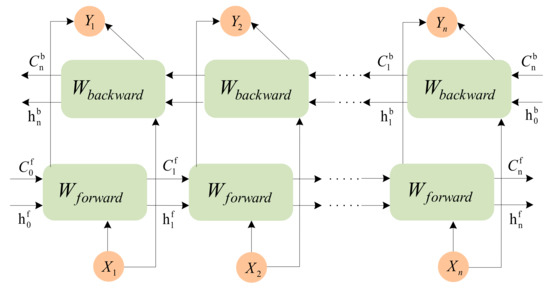
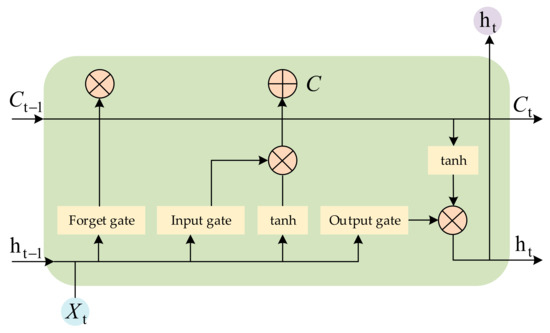
ویژگیهای زمانی محلی که توسط Bi-LSTM و ویژگیهای زمانی جهانی گرفتهشده توسط ترانسفورماتور گرفته شدهاند، از طریق مکانیزم دروازه با هم ترکیب میشوند. دروازه در معادله (7) نشان داده شده است.
که در آن g دروازه ای است برای تجمیع ویژگی های زمانی محلی و جهانی، سیگموئید()یک تابع فعال است. fلو fgپیش بینی های خطی هستند که داده های ورودی را به یک بردار 1 بعدی تبدیل می کنند. Yلخروجی Bi-LSTM است و Ygخروجی ترانسفورماتور است. ویژگی های زمانی جامع Yجبا وزن دهی به دست می آیند Yلو Ygبا دروازه g ، که در معادله (8) نشان داده شده است.
پس از به دست آوردن ویژگی های زمانی جامع اولین بلوک مکانی-زمانی، ویژگی های زمانی جامع را با ویژگی های مکانی به دست آمده ترکیب می کنیم. علاوه بر این، ویژگی های ذوب شده را در بلوک فضایی-زمانی بعدی وارد می کنیم. پس از به دست آوردن ویژگی های مکانی-زمانی نهایی، مقدار پیش بینی نهایی را از طریق دو لایه CNN بدست می آوریم. ما ویژگیهای با ابعاد بالا منتشر شده را با CNN در ابعاد ویژگی مورد نیاز ترکیب و صاف میکنیم. ویژگیهای ابعادی بالا به ویژگیهای ورودی و خروجی مسطح میشوند. در همین حال، داده ها به گام های زمانی هدف پیش بینی شده مسطح می شوند که در معادله (9) نشان داده شده است.
Y و X به ترتیب خروجی و ورودی GCTN هستند.
4. مطالعه موردی
4.1. مجموعه داده ها و معیارهای ارزیابی
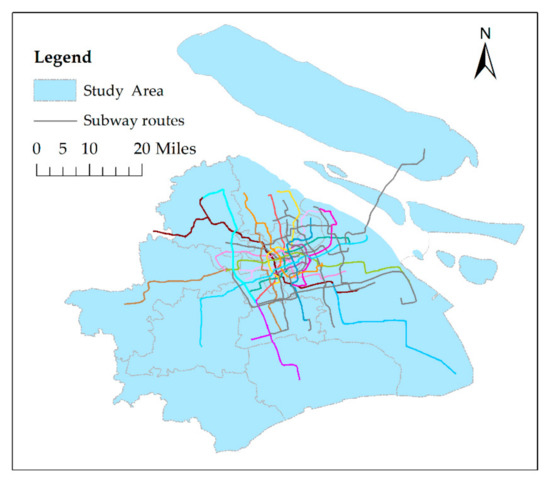
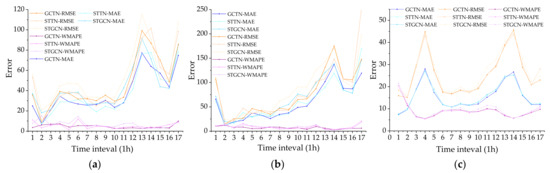
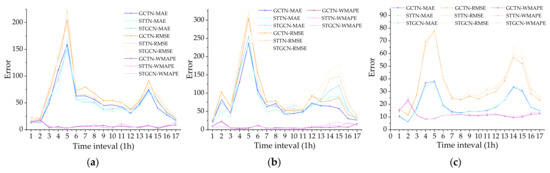
دامنه داده ها از 7 آوریل تا 30 آوریل 2015 است. در این مدت، روزانه حدود 9 میلیون کارت ثبت شده است که 289 ایستگاه مترو را پوشش می دهد. با توجه به عادات فعالیت عمومی مردم، این مقاله ساعت 5:30 تا 23:00 را به عنوان دوره تحقیق انتخاب می کند. علاوه بر این، ما 10 دقیقه، 20 دقیقه و 30 دقیقه را به عنوان فواصل زمانی برای شمارش جریان مسافر در نظر می گیریم. به عنوان مثال 10 دقیقه را در نظر بگیرید، داده ها در 23 روز را می توان به 2415 برش زمانی تقسیم کرد. داده ها به یک مجموعه آموزشی، یک مجموعه تایید و یک مجموعه تست با توجه به نسبت 6:2:2 تقسیم می شوند. ما از میانگین خطای مطلق (MAE)، ریشه میانگین مربع خطا (RMSE) و میانگین وزنی درصد مطلق خطا (WMAPE) برای تحلیل کمی و ارزیابی عملکرد پیشبینی مدلهای مختلف استفاده میکنیم. معیارهای ارزیابی در معادله (10) نشان داده شده است.
جایی که y^منمقدار پیش بینی شده است، yمنارزش واقعی است، nتعداد کل برش های زمانی است و منیک برش زمانی خاص است.
4.2. پارامترهای محیط و مدل
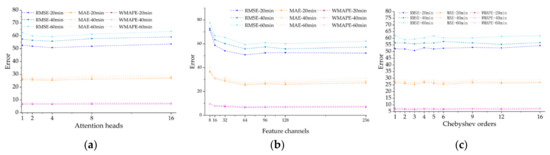
پس از آزمایش های آزمایشی فراوان و تنظیم پارامترها، پارامترهای بهینه مدل نهایی در بازه های زمانی 10 دقیقه، 20 دقیقه و 30 دقیقه مشابه هستند. مجموعه داده را با 20 دقیقه Tis به عنوان مثال در نظر می گیریم. ما از MSE به عنوان تابع ضرر استفاده می کنیم و فرآیند محاسبه در معادله (11) نشان داده شده است. ما همچنین از تکنیک توقف زودهنگام برای جلوگیری از برازش بیش از حد استفاده کردیم. این مدل برای 1000 تکرار آموزش داده شده است و معمولاً در حدود 600 تکرار متوقف می شود. تعداد بلوکهای فضایی-زمانی به عنوان یک، و اندازه دستهای به عنوان 45 تنظیم شده است. هد توجه چهار و کانالهای ویژگی روی 64 تنظیم شدهاند. تعداد لایههای GCN، LSTM و Transformer همگی به عنوان یک تنظیم شدهاند. فواصل زمانی الگوهای بسته، روزانه و هفتگی در داده های ورودی 1:1:1 است. کانال ورودی شامل ورودی و خروجی است.−3 ، و بهینه ساز Adam پذیرفته شده است.
4.3. مدل های پایه
-
رگرسیون خطی (LR) [ 56 ]: یک مدل آماری، که می تواند برای پیش بینی های آینده بر اساس رابطه خطی بین داده های ورودی و داده های هدف انجام دهد.
-
K-نزدیکترین همسایه (KNN) [ 19 ]: یک روش یادگیری ماشینی که در آن جریان مسافر گره هدف با توجه به میانگین جریان مسافر نزدیکترین همسایه آن محاسبه می شود.
-
رگرسیون برداری پشتیبانی با تابع پایه شعاعی (RSVR) [ 15 ]: یک روش یادگیری ماشین معمولی. تابع پایه شعاعی هسته SVR در یادگیری scikit است.
-
رگرسیون برداری پشتیبانی با تابع خطی (LSVR) [ 16 ]: یک روش یادگیری ماشین معمولی. تابع خطی هسته SVR در scikit-learn است.
-
حافظه کوتاه مدت دو جهته (Bi-LSTM) [ 42 ]: یک مدل یادگیری عمیق متشکل از دو لایه LSTM، که می تواند اطلاعات گذشته و آینده را ضبط کند.
-
ترانسفورماتور [ 53 ]: یک مدل یادگیری عمیق. این مبتنی بر مکانیزم توجه به خود است و می تواند وابستگی زمانی جهانی را مدل کند.
-
شبکه عصبی کانولوشنال (CNN) [ 38 ]: یک مدل یادگیری عمیق معمولی. در پیشبینی جریان ترافیک، دادهها در قالب تصویر دو بعدی به عنوان ورودی شبکه عصبی پردازش میشوند. علاوه بر این، محور عمودی نشان دهنده ایستگاه مترو و محور افقی نشان دهنده زمان است.
-
شبکه قراردادی نمودار مکانی-زمانی (STGCN) [ 44 ]: این مدل وابستگیهای مکانی را با استفاده از GCN و ویژگیهای زمانی را با استفاده از پیچیدگی 1 بعدی همراه با واحد خطی دروازهای (GLU) ثبت میکند.
-
شبکه ترانسفورماتور مکانی-زمانی (STNN) [ 53 ]: مدل یک حالت ترانسفورماتور مکانی-زمانی ایجاد می کند که ویژگی های زمانی را توسط ترانسفورماتور زمانی ثبت می کند، و ویژگی های مکانی را با ترکیب ترانسفورماتور فضایی و GCN ثبت می کند.
-
GCTN_NoLSTM: ما مؤلفه LSTM را در بلوک مکانی-زمانی GCTN حذف کردیم.
-
GCTN_NoTransformer: ما مؤلفه Transformer را در بلوک مکانی-زمانی GCTN حذف کردیم.
4.4. نتایج و بحث
4.4.1. مقایسه نتایج مدل های مختلف پیش بینی
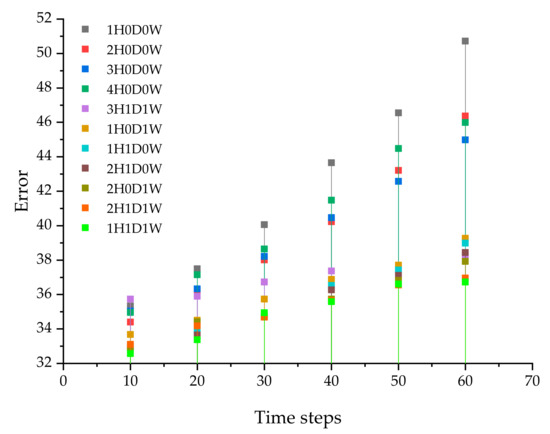
4.4.2. مطالعات فرسایشی
-
GCTN_1: مدل GCTN با استفاده از ماتریس مجاور بهبود نیافته.
-
GCTN_2: مدل GCTN از ماتریس مجاور بهبود یافته استفاده می کند. ترانسفورماتور بهبود یافته استفاده می شود، اما تلاش برای محصول نقطه ای اپراتور Laplacian در GCN حذف شده است.
-
GCTN_3: مدل GCTN از ماتریس مجاور بهبود یافته استفاده می کند. بهبود در GCN استفاده می شود، اما لایه کانولوشن اضافه شده در یک ترانسفورماتور حذف می شود.
-
GCTN_4: یک مدل اصلی GCTN بدون بهبود وجود دارد. به عبارت دیگر، پیشرفتها در ماتریس مجاور، GCN و ترانسفورماتور حذف میشوند.
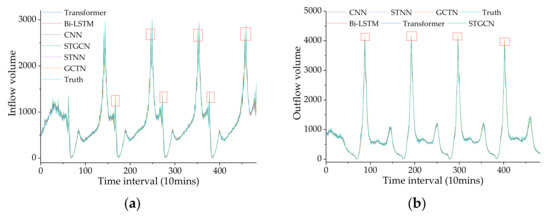
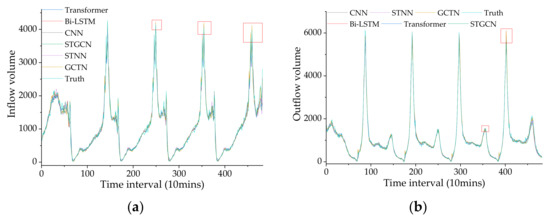
4.4.3. نتایج پیش بینی ایستگاه های مترو خاص
4.4.4. تأثیر فضایی اطراف در مورد ایستگاه ها
5. نتیجه گیری ها
منابع
- بانک جهانی. در دسترس آنلاین: https://www.worldbank.org/en/topic/urbandevelopment/overview#1 (در 20 ژانویه 2022 قابل دسترسی است).
- دینگیل، AE; روپی، اف. Esztergár-Kiss, D. بررسی یکپارچه عوامل اجتماعی و فنی مؤثر بر تصمیم گیری سفر و عملکرد حمل و نقل شهری. پایداری 2021 ، 13 ، 10158. [ Google Scholar ] [ CrossRef ]
- لیو، دی. وو، زی. Sun, S. مطالعه بر روی پیش بینی جریان مسافر در مترو بر اساس شبکه عصبی عود کننده عمیق. چندتایی. ابزارهای کاربردی 2020 ، 6 ، 335-343. [ Google Scholar ] [ CrossRef ]
- زو، ایکس. Guo, D. نقشه برداری داده های جریان فضایی بزرگ با خوشه بندی سلسله مراتبی. ترانس. GIS 2014 ، 18 ، 421-435. [ Google Scholar ] [ CrossRef ]
- موری، یو. مندیبورو، ا. آلوارز، م. Lozano, JA مروری بر تخمین و پیشبینی زمان سفر برای سیستمهای اطلاعات پیشرفته مسافران. ترانسپ ترانسپ. علمی 2015 ، 11 ، 119-157. [ Google Scholar ] [ CrossRef ]
- ژائو، ال. آهنگ، ی. ژانگ، سی. لیو، ی. وانگ، پی. لین، تی. دنگ، م. Li، H. T-GCN: یک شبکه کانولوشنال نمودار زمانی برای پیش بینی ترافیک. IEEE Trans. هوشمند ترانسپ سیستم 2020 ، 21 ، 3848-3858. [ Google Scholar ] [ CrossRef ]
- لیو، سی. لیو، اس. تیان، ی. Sun، QL; Tang, YY تحقیق در مورد پیش بینی جریان ترافیک ریلی بر اساس مدل ARIMA. J. Phys. Conf. سر. 2021 ، 1792 ، 012065. [ Google Scholar ] [ CrossRef ]
- احمد، ام اس; کوک، تحلیل واقعیت افزوده دادههای سری زمانی ترافیک آزادراه با استفاده از تکنیکهای Box-Jenkins. ترانسپ Res. ضبط 1979 ، 722 ، 1-9. [ Google Scholar ]
- چنگ، تی. وانگ، جی. هاورث، جی. هایدکر، بی. چاو، الف. یک ماتریس وزن فضایی پویا و میانگین متحرک یکپارچه خودبازگشتی مکان-زمان محلی برای مدلسازی شبکه. Geogr. مقعدی 2014 ، 46 ، 75-97. [ Google Scholar ] [ CrossRef ]
- میلنکوویچ، م. شوادلنکا، ال. ملیچار، وی. بویوویچ، ن. رویکرد مدلسازی Avramović، Z. SARIMA برای پیشبینی جریان مسافر راهآهن. حمل و نقل 2018 ، 33 ، 1113-1120. [ Google Scholar ] [ CrossRef ]
- دینگ، سی. دوان، جی. ژانگ، ی. وو، ایکس. یو، جی. استفاده از رویکرد مدلسازی ARIMA-GARCH برای بهبود حسابداری پیشبینی کوتاهمدت سواری مترو برای نوسانات پویا. IEEE Trans. هوشمند ترانسپ سیستم 2018 ، 19 ، 1054-1064. [ Google Scholar ] [ CrossRef ]
- اوکوتانی، آی. استفاندس، YJ پیشبینی دینامیکی حجم ترافیک از طریق نظریه فیلتر کالمن. ترانسپ Res. قسمت B 1984 ، 18 ، 1-11. [ Google Scholar ] [ CrossRef ]
- پیش بینی جریان ترافیک کومار، SV با استفاده از تکنیک فیلتر کالمن. Procedia Eng. 2017 ، 187 ، 582-587. [ Google Scholar ] [ CrossRef ]
- ژو، تی. جیانگ، دی. لین، ز. آویزان شدن.؛ خو، X. مدل فیلتر کالمن دوگانه هیبریدی Qin، J. برای پیشبینی کوتاهمدت جریان ترافیک. IET Intel. ترانسپ سیستم 2019 ، 13 ، 1023-1032. [ Google Scholar ] [ CrossRef ]
- Suthaharan, S. (ویرایش) ماشین بردار پشتیبانی. در مدلها و الگوریتمهای یادگیری ماشین برای طبقهبندی کلان دادهها: تفکر با مثالهایی برای یادگیری مؤثر . Springer: Boston, MA, USA, 2016; ص 207-235. [ Google Scholar ] [ CrossRef ]
- وو، CH; هو، جی.ام. Lee, DT پیشبینی زمان سفر با رگرسیون بردار پشتیبان. IEEE Trans. هوشمند ترانسپ سیستم 2004 ، 5 ، 276-281. [ Google Scholar ] [ CrossRef ]
- سو، اچ. ژانگ، ال. Yu, S. پیش بینی کوتاه مدت جریان ترافیک بر اساس رگرسیون بردار پشتیبانی افزایشی. در مجموعه مقالات سومین کنفرانس بین المللی محاسبات طبیعی، ICNC 2007، هایکو، چین، 24-27 اوت 2007. صص 640-645. [ Google Scholar ] [ CrossRef ]
- آلتمن، NS مقدمه ای بر رگرسیون ناپارامتریک هسته و نزدیکترین همسایه. صبح. آمار 1992 ، 46 ، 175-185. [ Google Scholar ] [ CrossRef ]
- یو، بی. وو، SH; وانگ، MH; ژائو، ZH K-نزدیکترین همسایه مدل پیشبینی کوتاهمدت جریان ترافیک. جیائوتونگ یونشو گونگ چنگ ژئوبائو/جی. Traffic Transp. مهندس 2012 ، 12 ، 105-111. [ Google Scholar ] [ CrossRef ]
- ژانگ، ال. لیو، کیو. یانگ، دبلیو. وی، ن. دونگ، دی. یک مدل K-نزدیکترین همسایه بهبود یافته برای پیشبینی کوتاهمدت جریان ترافیک. Procedia-Soc. رفتار علمی 2013 ، 96 ، 653-662. [ Google Scholar ] [ CrossRef ]
- سان، اس. ژانگ، سی. یو، جی. رویکرد شبکه بیزی برای پیشبینی جریان ترافیک. IEEE Trans. هوشمند ترانسپ سیستم 2006 ، 7 ، 124-132. [ Google Scholar ] [ CrossRef ]
- احمد، شبکه های بیزی SE و نمودارهای تصمیم. Technometrics 2008 , 50 , 97. [ Google Scholar ] [ CrossRef ]
- کیو، جی. لیو، ایکس. Ruyue، L. پیش بینی وضعیت ترافیک کوتاه مدت بر اساس ماشین بردار پشتیبانی. در مجموعه مقالات کنوانسیون حمل و نقل جهانی 2019، پکن، چین، 13 ژوئن 2019؛ صص 720-727. [ Google Scholar ]
- لینگ، ایکس. فنگ، ایکس. چن، ز. خو، ی. Haifeng, Z. پیشبینی کوتاهمدت جریان ترافیک با ماشین بردار پشتیبانی چند هستهای بهینهسازی شده. در مجموعه مقالات کنگره IEEE 2017 در محاسبات تکاملی، CEC، سن سباستین، اسپانیا، 5 تا 8 ژوئن 2017؛ صص 294-300. [ Google Scholar ] [ CrossRef ]
- لو، سی. هوانگ، سی. کائو، جی. لو، جی. هوانگ، دبلیو. گوا، جی. Wei, Y. پیشبینی جریان ترافیک کوتاهمدت بر اساس ماشین بردار پشتیبان حداقل مربع با الگوریتم بهینهسازی ترکیبی. فرآیند عصبی. Lett. 2019 ، 50 ، 2305-2322. [ Google Scholar ] [ CrossRef ]
- یین، اچ. وانگ، SC; خو، جی. Wong، CK پیشبینی جریان ترافیک شهری با استفاده از رویکرد عصبی فازی. ترانسپ Res. قسمت C Emerg. تکنولوژی 2002 ، 10 ، 85-98. [ Google Scholar ] [ CrossRef ]
- بهارتی، اس. Vinod، KK; Arvind، مدل منطق فازی KG برای پیشبینی حجم ترافیک در روزهای هفته. بین المللی جی. کامپیوتر. Appl. 2014 ، 107 ، 1-6. [ Google Scholar ] [ CrossRef ]
- هان، ی. پنگ، تی. وانگ، سی. ژانگ، ز. چن، جی. یک مدل GLM ترکیبی برای پیشبینی جریان مسافری مترو در سطح شهر. ISPRS Int. J. Geo-Inf. 2021 ، 10 ، 222. [ Google Scholar ] [ CrossRef ]
- بلهادی، ع. جنوری، ی. جنوری، د. لین، JC-W. یک شبکه عصبی تکراری برای پیشبینی جریان ترافیک شهری درازمدت Appl. هوشمند 2020 ، 50 ، 3252-3265. [ Google Scholar ] [ CrossRef ]
- لی، ز. لی، سی. کوی، ایکس. Zhang, Z. پیشبینی کوتاهمدت جریان ترافیک بر اساس شبکه عصبی مکرر. در مجموعه مقالات کنفرانس بین المللی 2021 در زمینه ارتباطات رایانه ای و هوش مصنوعی (CCAI)، گوانگژو، چین، 7 تا 9 مه 2021؛ صص 81-85. [ Google Scholar ] [ CrossRef ]
- فو، آر. ژانگ، ز. Li, L. استفاده از روش های شبکه عصبی LSTM و GRU برای پیش بینی جریان ترافیک. در مجموعه مقالات سی و یکمین کنفرانس سالانه آکادمیک جوانان انجمن اتوماسیون چین، YAC 2016، ووهان، چین، 11 تا 13 نوامبر 2016؛ صص 324-328. [ Google Scholar ] [ CrossRef ]
- ویبین، ز. یینگهائو، ی. یونگ، کیو. فنگ، اس. Yinhai، W. پیشبینی کوتاهمدت جریان ترافیک بر اساس تجزیه و تحلیل مکانی-زمانی و یادگیری عمیق CNN. ترانسپ ترانسپ. علمی 2019 ، 15 ، 1688-1711. [ Google Scholar ] [ CrossRef ]
- Agafonov، A. پیشبینی جریان ترافیک با استفاده از شبکههای عصبی پیچیدگی نمودار. در مجموعه مقالات دهمین کنفرانس بین المللی علوم و فناوری اطلاعات 2020 (ICIST)، لندن، انگلستان، 9 تا 15 سپتامبر 2020؛ ص 91-95. [ Google Scholar ] [ CrossRef ]
- یان، بی. وانگ، جی. یو، جی. جین، ایکس. Zhang، H. شبکه عصبی نمودار فضایی-زمانی چبیشف برای پیشبینی جریان ترافیک در ITS مبتنی بر اینترنت اشیا. IEEE Internet Things J. 2017 , 9 , 9266–9279. [ Google Scholar ] [ CrossRef ]
- ژائو، ز. چن، دبلیو. وو، ایکس. چن، PCY; شبکه لیو، جی. LSTM: یک رویکرد یادگیری عمیق برای پیش بینی ترافیک کوتاه مدت. IET Intel. ترانسپ سیستم 2017 ، 11 ، 68-75. [ Google Scholar ] [ CrossRef ]
- لی، جی اس. پنگ، ال. لی، ایکس. Wu, T. پیشبینی ترافیک کوتاهمدت ایستگاههای اتوبوس شهری بر اساس حافظه کوتاهمدت. جی. هایو. ترانسپ Res. توسعه دهنده (Engl. Ed.) 2019 ، 13 ، 65–72. [ Google Scholar ] [ CrossRef ]
- کیائو، ی. وانگ، ی. مک.؛ یانگ، جی. پیشبینی کوتاهمدت جریان ترافیک بر اساس ساختار شبکه عصبی 1DCNN-LSTM. مد. فیزیک Lett. B 2020 , 35 , 2150042. [ Google Scholar ] [ CrossRef ]
- ما، ایکس. دای، ز. او، ز. ما، جی. وانگ، ی. Wang, Y. ترافیک یادگیری به عنوان تصاویر: یک شبکه عصبی پیچیده عمیق برای پیش بینی سرعت شبکه حمل و نقل در مقیاس بزرگ. Sensors 2017 , 17 , 818. [ Google Scholar ] [ CrossRef ]
- لیو، ی. ژنگ، اچ. فنگ، ایکس. Chen, Z. پیشبینی کوتاهمدت جریان ترافیک با Conv-LSTM. در مجموعه مقالات نهمین کنفرانس بین المللی 2017 در زمینه ارتباطات بی سیم و پردازش سیگنال، WCSP، نانجینگ، چین، 11 تا 13 اکتبر 2017؛ صص 1-6. [ Google Scholar ] [ CrossRef ]
- یو، دبلیو. ژیفی، دبلیو. هونگیه، دبلیو. جونفنگ، ز. Ruilong، F. پیش بینی جریان مسافر بر اساس مدل ترکیبی CNN-LSTM. در مجموعه مقالات دوازدهمین سمپوزیوم بین المللی هوش محاسباتی و طراحی (ISCID) 2019، هانگژو، چین، 14 تا 15 دسامبر 2019؛ صص 132-135. [ Google Scholar ] [ CrossRef ]
- کانر، جی تی. مارتین، RD; اطلس، شبکه های عصبی بازگشتی LE و پیش بینی سری زمانی قوی. IEEE Trans. شبکه عصبی 1994 ، 5 ، 240-254. [ Google Scholar ] [ CrossRef ] [ PubMed ]
- نواک، ج. تاسپینار، ا. Scherer، R. LSTM شبکه های عصبی بازگشتی برای طبقه بندی متن کوتاه و احساسات. در مجموعه مقالات کنفرانس بین المللی هوش مصنوعی و محاسبات نرم، زاکوپان، لهستان، 11 تا 15 ژوئن 2017؛ نکات سخنرانی در علوم کامپیوتر. Springer: Cham, Switzerland, 2017; جلد 10246، ص 553–562. [ Google Scholar ] [ CrossRef ]
- چو، ک. ون مرینبور، بی. بهداناو، د. Bengio، Y. در مورد خواص ترجمه ماشین عصبی: رویکردهای رمزگذار-رمزگشا. در مجموعه مقالات کارگاه آموزشی SSST 2014-2014 در مورد نحو، معناشناسی و ساختار در ترجمه آماری، دوحه، قطر، 25 اکتبر 2014. صص 103-111. [ Google Scholar ] [ CrossRef ]
- یو، بی. یین، اچ. Zhu, Z. شبکههای کانولوشنال نمودار فضایی-زمانی: یک چارچوب یادگیری عمیق برای پیشبینی ترافیک. arXiv 2017 , arXiv:1709.04875. [ Google Scholar ]
- لی، ز. شیونگ، جی. چن، ی. Lv، Y.; هو، بی. زو، اف. وانگ، F.-Y. یک رویکرد یادگیری عمیق ترکیبی با GCN و LSTM برای پیشبینی جریان ترافیک. در مجموعه مقالات کنفرانس سیستم های حمل و نقل هوشمند IEEE 2019، ITSC 2019، اوکلند، نیوزیلند، 27 تا 30 اکتبر 2019؛ صفحات 1929-1933. [ Google Scholar ] [ CrossRef ]
- Lv، M. هنگ، ز. چن، ال. چن، تی. زو، تی. جی، S. شبکه کانولوشن چند گرافی زمانی برای پیشبینی جریان ترافیک. IEEE Trans. هوشمند ترانسپ سیستم 2021 ، 22 ، 3337-3348. [ Google Scholar ] [ CrossRef ]
- برونا، جی. زارمبا، دبلیو. اسلم، آ. LeCun، Y. شبکه های طیفی و شبکه های عمیق محلی متصل بر روی نمودارها. arXiv 2014 ، arXiv:1312.6203. [ Google Scholar ]
- دیفرارد، ام. برسون، ایکس. Vandergheynst، P. شبکههای عصبی کانولوشنال روی نمودارها با فیلتر کردن طیفی سریع محلی. arXiv 2016 , arXiv:1606.09375. [ Google Scholar ] [ CrossRef ]
- بهداناو، د. چو، خ. Bengio، Y. ترجمه ماشینی عصبی با یادگیری مشترک تراز و ترجمه. arXiv 2014 ، arXiv:1409.0473. [ Google Scholar ]
- بای، جی. ژو، جی. آهنگ، ی. ژائو، ال. هو، ز. دو، آر. Li، H. A3T-GCN: توجه به شبکه کانولوشن نمودار زمانی برای پیش بینی ترافیک. ISPRS Int. J. Geo-Inf. 2021 ، 10 ، 485. [ Google Scholar ] [ CrossRef ]
- ژانگ، جی. چن، اف. کوی، ز. گوا، ی. Zhu, Y. معماری یادگیری عمیق برای پیش بینی جریان مسافر کوتاه مدت در حمل و نقل ریلی شهری. IEEE Trans. هوشمند ترانسپ سیستم 2021 ، 22 ، 7004–7014. [ Google Scholar ] [ CrossRef ]
- ژو، جی. وانگ، کیو. تائو، سی. دنگ، اچ. ژائو، ال. Li, H. AST-GCN: شبکه کانولوشنی نمودار فضایی-زمانی با ویژگی افزوده شده برای پیش بینی ترافیک. دسترسی IEEE 2021 ، 9 ، 35973–35983. [ Google Scholar ] [ CrossRef ]
- خو، ام. دای، دبلیو. لیو، سی. گائو، ایکس. لین، دبلیو. چی، جی. Xiong، H. شبکه های ترانسفورماتور مکانی-زمانی برای پیش بینی جریان ترافیک. arXiv 2020 ، arXiv:2001.02908. [ Google Scholar ]
- واسوانی، ع. Shazeer, N. پارمار، ن. Uszkoreit، J. جونز، ال. گومز، AN; قیصر، Ł. Polosukhin، I. توجه شما تمام چیزی است که نیاز دارید. در مجموعه مقالات سی و یکمین کنفرانس بین المللی سیستم های پردازش اطلاعات عصبی، لانگ بیچ، کالیفرنیا، ایالات متحده آمریکا، 4 دسامبر 2017; صفحات 6000–6010. [ Google Scholar ]
- دالدال، ن. سنگور، ا. پولات، ک. کومرت، Z. یک سیستم دمودولاسیون جدید برای سیگنال های مدولاسیون دیجیتال باند پایه بر اساس مدل حافظه کوتاه مدت عمیق عمیق. Appl. آکوست. 2020 , 166 , 107346. [ Google Scholar ] [ CrossRef ]
- Ober, PB مقدمه ای بر تحلیل رگرسیون خطی. JR Stat. Soc. 2010 ، 40 ، 2775-2776. [ Google Scholar ] [ CrossRef ]


بدون دیدگاه