

مرحله سوم پروژه نقشه برداری با پهپاد: طراحی پرواز
در مقالات قبل با مراحل اول و دوم یک پروژه نقشه برداری آشنا شدیم:
مرحله اول: شناسایی منطقه
این مرحله شامل بررسی اولیه منطقه پروژه با استفاده از ابزارهایی مانند تصاویر ماهوارهای، نقشه های توپوگرافی، و بازدید میدانی است. اهداف اصلی عبارتند از:
-
تعیین محدوده جغرافیایی و مساحت منطقه.
-
شناسایی موانع فیزیکی (مانند درختان، ساختمانها، و خطوط برق).
-
بررسی شرایط جوی و محیطی (مانند باد، دما، و رطوبت).
-
تحلیل الزامات قانونی (مانند مجوزهای پرواز و حریم هوایی).
-
جمع آوری داده های مرجع مانند نقاط کنترل زمینی (GCPs) برای افزایش دقت.
مرحله دوم: عملیات زمینی
این مرحله شامل آماده سازی تجهیزات و اجرای فعالیتهای میدانی است:
-
کالیبراسیون پهپاد، سنسورها، و دوربین ها.
-
نصب و ثبت نقاط کنترل زمینی (GCPs) با دقت سانتیمتری.
-
تست سیستم های ارتباطی (مانند رادیو کنترل و ارتباط با GNSS).
-
برنامه یزی مسیرهای پرواز اولیه و بررسی ایمنی منطقه.
-
آموزش تیم عملیاتی برای واکنش به شرایط اضطراری.

در این مقاله مرحله سوم یک پروژه نقشه برداری با پهپاد شرح داده می شود.
مرحله سوم — طراحی پرواز اتوماتیک
فهرست مطالب
-
مقدمه
-
انواع پهپادها و ویژگیهای آنها
-
مولتی روتورها (Multirotors)
-
بال ثابتها (Fixed-Wing)
-
پهپادهای VTOL (عمودپرواز و بالثابت)
-
تیلت-روتورها (Tilt-Rotor)
-
-
پرواز دستی (Manual) vs. پرواز اتوماتیک
-
نرم افزارهای طراحی پرواز اتوماتیک
-
نرم افزارهای تحت ویندوز
-
نرم افزارهای اندروید و iOS
-
مقایسه رایگان vs. پولی
-
-
فاکتورهای طراحی پرواز اتوماتیک
-
تعیین محدوده و ارتفاع پرواز
-
محاسبه GSD (فاصله نمونه برداری زمینی)
-
پوشش طولی و عرضی (Overlap)
-
سرعت پرواز و تأثیر آن بر دقت
-
تنظیمات وابسته به شرایط جوی
-
-
تنظیمات دوربین در نرم افزارها
-
نرم افزار (DJI GO 4)
-
پارامترهای کلیدی: دیافراگم، شاتر، ISO، فوکوس
-
-
مطالعه موردی: نرم افزارهای Pix4Dcapture و DJI Pilot 2
-
ملاحظات پیشرفته و نکات فنی
-
نتیجه گیری
۱. مقدمه
طراحی پرواز اتوماتیک قلب تپنده نقشه برداری با پهپاد است. این مرحله تضمین میکند که داده ها با بیشترین دقت و کمترین خطا جمع آوری شوند. در این مقاله، به طور جامع به بررسی فناوری ها، نرم افزارها، و پارامترهای حیاتی این فرآیند میپردازیم.
۲. انواع پهپادها و ویژگیهای آنها
الف) مولتی روتورها (Multirotors)
-
ساختار: ۴ تا ۸ موتور با پروانه های عمودپرواز.
-
مزایا:
-
قابلیت پرواز در فضای محدود و مانورپذیری بالا.
-
امکان توقف در هوا (Hovering) برای ثبت تصاویر دقیق.
-
مناسب برای مناطق شهری و پروژه های کوچک و متوسط.
-
-
معایب:
-
محدودیت زمان پرواز (۱۵–۳۰ دقیقه).
-
حساسیت به بادهای شدید.
-
-
مدلهای شاخص:
-
DJI Phantom 4 RTK: دقت سانتیمتری با سیستم RTK.
-
DJI Matrice 300: قابلیت حمل سنسورهای چندگانه.
-
ب) بال ثابتها (Fixed-Wing)
-
ساختار: بالهای ثابت مشابه هواپیما.
-
مزایا:
-
زمان پرواز طولانی (۶۰–۱۲۰ دقیقه).
-
پوشش مناطق وسیع (مثلاً ۵۰۰ هکتار در یک پرواز).
-
-
معایب:
-
نیاز به باند فرود یا سیستم پرتاب/فرود.
-
عدم توانایی در Hovering.
-
-
مدلهای شاخص:
-
SenseFly eBee X: مجهز به سنسورهای چندطیفی.
-
ج) پهپادهای VTOL
-
ترکیب مزایا: پرواز عمودی مانند مولتی روتور + پرواز افقی مانند بال ثابت.
-
کاربرد: مناطق دورافتاده با محدودیت فرود.
-
مدل شاخص: Quantum-Systems Trinity.
د) تیلت-روتورها (Tilt-Rotor)
-
ویژگی: پروانه ها برای پرواز عمودی و افقی میچرخند.
-
مزیت: کارایی در محیطهای پیچیده.
-
مدل شاخص: V-Bat .

۳. پرواز دستی در مقایسه با پرواز اتوماتیک
در پروژههای نقشهبرداری و تصویربرداری با پهپاد، انتخاب بین پرواز دستی و پرواز اتوماتیک به اهداف پروژه، پیچیدگی محیط، و الزامات دقت وابسته است. در حالی که پرواز اتوماتیک به عنوان استاندارد طلایی در نقشه برداری شناخته میشود، پرواز دستی هنوز در برخی سناریوهای خاص کاربرد دارد. در این بخش، به تشریح تفاوتها، مزایا، معایب، و کاربردهای هر دو روش میپردازیم.
۱. پرواز دستی (Manual Flight)
مزایا:
۱. انعطاف پذیری بالا:
-
امکان مانور سریع در محیطهای پیچیده با موانع غیرقابل پیش بینی (مانند درختان بلند، خطوط برق، یا سازه های تاریخی).
-
مناسب برای ثبت تصاویر از زوایای خاص (مثلاً عکاسی معماری از نمای نزدیک).
۲. تصویربرداری خلاقانه:
-
کنترل لحظه ای روی زاویه دوربین، سرعت، و ارتفاع برای خلق جلوه های بصری (مانند پَنینگ یا حرکات دینامیکی).
۳. نیاز به زیرساخت کمتر:
-
عدم وابستگی به نرم افزارهای برنامه ریزی یا سیستم های ناوبری پیشرفته.
معایب:
۱. ریسک خطای انسانی:
-
ناهمگونی در همپوشانی تصاویر (Overlap) به دلیل تفاوت در سرعت یا ارتفاع پرواز.
-
احتمال ثبت نکردن نقاط کلیدی یا ایجاد شکاف در پوشش منطقه.
۲. خستگی خلبان:
-
کاهش تمرکز پس از پروازهای طولانی ⇒ افزایش احتمال برخورد با موانع.
۳. زمانبر بودن:
-
نیاز به تکرار پرواز برای پوشش مناطقی که فاقد همپوشانی هستند.
کاربردهای اصلی پرواز دستی:
-
تصویربرداری تبلیغاتی یا هنری (فیلمبرداری هوایی از مراسم، مستندسازی طبیعت).
-
بازرسی های فوری (بررسی خسارت پس از طوفان در مناطق کوچک).
-
مناطق با چالشهای قانونی (مثلاً پرواز در نزدیکی فرودگاه ها که نیاز به کنترل لحظه ای دارد).
۲. پرواز اتوماتیک (Autonomous Flight)
مزایا:
۱. دقت و یکنواختی:
-
ثبت تصاویر با همپوشانی ثابت (مثلاً ۷۰% طولی و ۶۰% عرضی) برای پردازش بدون خطا در نرم افزارهای فتوگرامتری (مانند Pix4D یا Agisoft).
-
تنظیم ارتفاع و سرعت پرواز بر اساس محاسبات GSD (فاصله نمونه برداری زمینی).
۲. بهره وری زمانی:
-
پوشش مناطق وسیع در زمان کوتاه با مسیرهای بهینه شده (مثلاً ۱۰۰ هکتار در یک پرواز).
-
کاهش نیاز به نظارت مداوم ⇒ امکان اجرای چندین پرواز همزمان.
۳. کاهش خطا:
-
حذف خطاهای ناشی از خستگی یا بی احتیاطی خلبان.
-
یکپارچه سازی با سیستم های RTK/PPK برای دقت سانتیمتری.
۴. امکان تکرارپذیری:
-
ذخیره مسیرهای پرواز برای استفاده مجدد در پروژه های آتی یا مانیتورینگ بلندمدت.
معایب:
۱. وابستگی به فناوری:
-
احتمال اختلال در سیستمهای ناوبری (مثلاً تداخل GPS یا خطا در سنسورها).
-
نیاز به دانش فنی برای تنظیم پارامترهای نرم افزار.
۲. محدودیت در محیط های پیچیده:
-
پروازهای ازپیش برنامه ریزی شده ممکن است برای مناطق با موانع پویا (مانند جرثقیل های متحرک) مناسب نباشند.
کاربردهای اصلی پرواز اتوماتیک:
-
نقشه برداری توپوگرافی (تهیه DEM، DSM، و نقشه های کانتوری).
-
پایش کشاورزی (مانند آنالیز NDVI برای مزارع بزرگ).
-
مدلسازی 3D از سایت های صنعتی یا باستانی.
-
بررسی تغییرات محیطی (مانند فرسایش خاک یا رشد شهری).
۳. مقایسه کلیدی در پروژههای نقشه برداری
| پارامتر | پرواز دستی | پرواز اتوماتیک |
|---|---|---|
| دقت مکانی | وابسته به مهارت خلبان | استانداردشده با محاسبات GSD |
| همپوشانی تصاویر | ناهمگون | یکنواخت (۷۰%-۸۰%) |
| زمان اجرا | طولانی (با ریسک خطا) | کوتاه و قابل پیشبینی |
| هزینه نیروی انسانی | بالا (نیاز به خلبان حرفه ای) | پایین (خودکارسازی) |
| نیاز به نرم افزار طراحی | دارد | ندارد |
۴. سناریوهای ترکیبی: پرواز نیمه خودکار
در برخی پروژه ها، ترکیبی از هر دو روش استفاده میشود:
-
مرحله اول: نقشه برداری کلی با پرواز اتوماتیک برای پوشش منطقه.
-
مرحله دوم: پرواز دستی برای بازبینی نقاط مشکوک یا ثبت جزئیات (مثلاً ترکهای دیوار در بازرسی ساختمان).
۵. نکات فنی برای بهینه سازی پرواز اتوماتیک
۱. تنظیم همپوشانی بر اساس ارتفاع:
-
در ارتفاع پایین (۵۰ متر)، همپوشانی ۸۰% برای مدلسازی 3D ضروری است.
-
در ارتفاع بالا (۱۲۰ متر)، همپوشانی ۶۰% برای نقشه های 2D کافی است.
۲. مدیریت شرایط جوی:
-
در بادهای بالای ۱۰ m/s، افزایش همپوشانی تا ۸۵% برای جبران جابه جایی پهپاد.
-
استفاده از حالت Terrain Follow در مناطق شیبدار برای حفظ ارتفاع ثابت نسبت به زمین.
۳. یکپارچه سازی GCPs:
-
قراردادن نقاط کنترل زمینی در گوشهها و مرکز منطقه ⇒ کاهش خطای انباشته در پردازش.
۶. جمع بندی
در پروژههای نقشه برداری، پرواز اتوماتیک به دلیل دقت، سرعت، و قابلیت تکرارپذیری به عنوان روش غالب شناخته میشود. با این حال، پرواز دستی در مواردی که نیاز به انعطاف پذیری بالا یا تصویربرداری هنری وجود دارد، جایگاه خود را حفظ کرده است. انتخاب نهایی باید مبتنی بر نیازهای پروژه، بودجه، و پیچیدگی محیطی باشد. برای دستیابی به بهترین نتایج، ترکیب هوشمندانه این دو روش در برخی سناریوها توصیه میشود.
۴. نرم افزارهای طراحی پرواز اتوماتیک
دسته بندی نرم افزارهای طراحی پرواز اتوماتیک پهپاد
1. نرم افزارهای تحت ویندوز (عموماً برای پهپادهای بال ثابت)
-
رایگان:
-
Mission Planner: نرم افزار متن باز برای طراحی مسیر پرواز، تحلیل دادهها، و کنترل پهپادهای مبتنی بر سیستم ArduPilot.
-
APM Planner: مشابه Mission Planner، برای پهپادهای بال ثابت و مولتی روتور با قابلیت برنامه ریزی مسیرهای پیچیده.
-
QGroundControl: نرم افزار چند پلتفرمی (ویندوز، لینوکس، مک) برای پهپادهای مبتنی بر PX4 و ArduPilot با رابط کاربری ساده.
-
-
غیررایگان:
-
UgCS (Universal Ground Control Software): نرم افزار حرفه ای برای طراحی مسیرهای پرواز سه بعدی، پشتیبانی از پهپادهای بال ثابت، و ادغام با سنسورهای LiDAR و دوربین های حرفه ای.
-
Litchi (برای ویندوز): نسخه ویندوزی این نرم افزار که برای طراحی مسیرهای Waypoint و کنترل پهپادهای DJI استفاده میشود.
-
2. نرم افزارهای تحت موبایل (اندروید و iOS)
-
رایگان:
-
DJI Pilot 2: نرم افزار رسمی DJI برای کنترل پهپادهای Enterprise مانند Matrice 300 RTK با قابلیت طراحی مسیرهای پرواز هوشمند.
-
Pix4Dcapture: نرم افزار رایگان برای طراحی پروازهای نقشه برداری و فتوگرامتری با پهپادهای DJI و Autel.
-
DroidPlanner: نرم افزار اندرویدی برای پهپادهای مبتنی بر ArduPilot.
-
-
غیررایگان:
-
UGCS Mobile: نسخه موبایلی UgCS با قابلیت طراحی مسیرهای پرواز و ادغام با سخت افزارهای حرفه ای.
-
Maps (Mobile Aerial Photogrammetry Software): برای طراحی پروازهای نقشه برداری با خروجی GeoTIFF و DEM.
-
3. نرم افزارهای چندپلتفرمی (ویندوز + موبایل)
-
DroneDeploy: تحت وب و موبایل، برای نقشهبرداری و تحلیل دادههای هوایی.
-
Pix4Dmapper: ترکیبی از نرم افزار دسکتاپ و موبایل (Pix4Dcapture) برای فتوگرامتری.
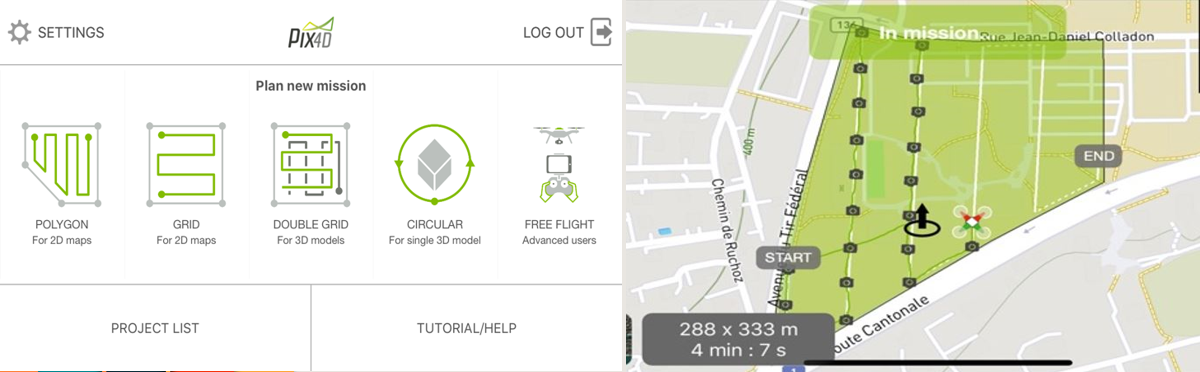
توضیحات تکمیلی درباره Pix4Dcapture و DJI Pilot 2
1. Pix4Dcapture
-
هدف اصلی: طراحی پروازهای نقشه برداری هوایی و فتوگرامتری با پهپادهای سازگار (DJI، Autel، Parrot).
-
ویژگیهای کلیدی:
-
الگوهای پرواز خودکار: شامل شبکه (Grid)، دایره ای (Circular)، و تکخطی (Single-line) برای پوشش کامل منطقه.
-
تنظیمات پیشرفته: تعیین ارتفاع پرواز، همپوشانی تصاویر (Overlap)، و زاویه دوربین.
-
ادغام با Pix4Dmapper: داده های جمع آوری شده مستقیماً به نرمافزار Pix4Dmapper برای پردازش ابر نقطهای و مدلسازی 3D منتقل میشوند.
-
پشتیبانی از RTK/PPK: افزایش دقت مکانی با استفاده از سیستم های ناوبری ماهوارهای پیشرفته.
-
سازگاری: کاربرد گسترده در کشاورزی، معدن، و ساخت و ساز.
-
-
محدودیتها:
-
تنها برای پهپادهای خاص (عمدتاً DJI) بهینه شده است.
-
نسخه رایگان آن محدودیتهایی در ذخیره سازی پروژه ها دارد.
-
2. DJI Pilot 2
-
هدف اصلی: کنترل پهپادهای Enterprise DJI مانند Matrice 300 RTK و Mavic 3 Enterprise برای مأموریت های صنعتی.
-
ویژگیهای کلیدی:
-
طراحی مسیرهای هوشمند: Waypoint، شبکه، و الگوهای اسکن سه بعدی (3D Scan).
-
پشتیبانی از سنسورهای چندگانه: همزمانی با دوربینهای دید در شب (Thermal)، LiDAR، و سنسورهای چندطیفی.
-
Real-Time Kinematic (RTK): دقت سانتیمتری در نقشه برداری.
-
زمان بندی پرواز: برنامه ریزی خودکار پرواز بر اساس زمان یا شرایط جوی.
-
پخش زنده دادهها: انتقال ویدئو و دادههای مکانی به صورت زنده به تیم های زمینی.
-
-
محدودیتها:
-
فقط با پهپادهای DJI Enterprise سازگار است.
-
نیاز به آموزش حرفه ای برای استفاده از تمام قابلیتها.
-
۵. فاکتورهای طراحی پرواز اتوماتیک
الف) تعیین محدوده و ارتفاع
-
محدوده: ترسیم منطقه در نرم افزار با مختصات GPS.
-
ارتفاع:
-
رابطه مستقیم با دقت GSD:
-
GSD = (سایز سنسور (mm) × ارتفاع (m)) / (فاصله کانونی (mm) × رزولوشن تصویر)
- مثال: ارتفاع ۱۰۰ متر با دوربین GSD 3cm ≈ ۲۰MP
ب) همپوشانی طولی و عرضی
-
حداقل همپوشانی: ۷۰% طولی و ۶۰% عرضی برای مدلسازی 3D.
-
تأثیر باد: افزایش همپوشانی تا ۸۰% در شرایط باد شدید.
ج) سرعت پرواز
-
بهینه سازی: سرعت بالا ⇒ زمان کمتر، ولی لرزش بیشتر.
-
فرمول:
سرعت (m/s)=GSD(m)×نرخ فریم(Hz)
د) تنظیمات وابسته به دما و فشار هوا
-
ارتفاع دینامیکی: در مناطق کوهستانی، ارتفاع پرواز بر اساس فشار هوا تنظیم میشود.

۶. تنظیمات دوربین
توضیحات فنی پارامترهای عکاسی: عملکرد و شرایط تنظیم
در عکاسی با پهپاد، تنظیم سرعت شاتر، دیافراگم، ISO، و فوکوس به شرایط نوری، سوژه، و اهداف خلاقانه شما بستگی دارد. در ادامه، بازنگری دقیقتری بر اساس مثالهای کاربردی ارائه میشود:
۱. سرعت شاتر (Shutter Speed)
عملکرد:
-
سرعت شاتر مدت زمان باز بودن پرده شاتر و رسیدن نور به سنسور را کنترل میکند.
-
با واحد کسر ثانیه بیان میشود (مثلاً ۱/۱۰۰۰، ۱/۲۵۰، ۱/۵۰).
شرایط تنظیم:
-
سوژههای بسیار سریع (پرندگان، خودروها):
-
۱/۱۰۰۰ تا ۱/۲۰۰۰ ثانیه برای فریز کردن حرکت بدون محوشدگی (Motion Blur).
-
مثال: ثبت پرواز پرنده در آسمان با سرعت بالا.
-
-
سوژه های متحرک معمولی (درختان در باد، انسانها):
-
۱/۲۵۰ تا ۱/۵۰۰ ثانیه برای جلوگیری از محوشدگی جزئی.
-
مثال: عکاسی از یک رودخانه با جریان سریع.
-
-
صحنه های ثابت یا ویدیوهای سینمایی:
-
۱/۵۰ تا ۱/۱۰۰ ثانیه برای ایجاد Motion Blur طبیعی (با قانون ۱۸۰ درجه).
-
مثال: فیلمبرداری هوایی از یک منظره با نرخ فریم 24fps و شاتر ۱/۵۰ ثانیه.
-
-
نور کم (غروب/شب):
-
۱/۵۰ تا ۱/۱۰۰ ثانیه همراه با سه پایه یا گیمبال پایدار.
-
مثال: عکاسی از شهر در شب با نور چراغها.
-
نکات فنی:
-
قانون ۱۸۰ درجه (ویدیو):
-
سرعت شاتر = ۱/(۲ × نرخ فریم).
-
مثال: برای 24fps → ۱/۵۰ ثانیه، برای 30fps → ۱/۶۰ ثانیه.
-
-
فیلترهای ND:
-
در نور شدید، برای کاهش سرعت شاتر به محدوده ایده آل (مثلاً ۱/۵۰ ثانیه) از فیلتر ND8/ND16 استفاده کنید.
-
۲. دیافراگم (Aperture)
عملکرد:
-
کنترل عمق میدان و میزان نور ورودی.
-
اعداد f-stop مانند f/2.8 (باز) تا f/11 (بسته).
شرایط تنظیم:
-
پس زمینه محو (بوکه): f/2.8–f/4 (مناسب برای پرتره هوایی).
-
عمق میدان گسترده (مناظر): f/8–f/11.
-
نور شدید: f/5.6–f/8 برای جلوگیری از نوردهی بیش از حد.
۳. ISO
عملکرد:
-
افزایش ISO باعث حساسیت سنسور به نور و افزایش نویز میشود.
شرایط تنظیم:
-
نور کافی: ISO 100–200 (حداقل نویز).
-
نور کم:
-
سنسورهای کوچک (Mavic Air 2): حداکثر ISO 800.
-
سنسورهای ۱ اینچی (Mavic 3): حداکثر ISO 1600–3200.
-
۴. فوکوس (Focus)
حالتهای کلیدی:
-
فوکوس خودکار (AF):
-
برای سوژه های متحرک یا تغییر سریع صحنه.
-
-
فوکوس دستی (MF):
-
تنظیم روی بینهایت (∞) برای مناظر دوردست.
-
استفاده از Focus Peaking برای تشخیص نواحی شارپ.
-
۵. مثالهای کاربردی ترکیب تنظیمات
مثال ۱: عکاسی از یک خودروی در حال حرکت
-
هدف: فریز کردن حرکت خودرو.
-
تنظیمات:
-
شاتر: ۱/۱۰۰۰ ثانیه.
-
دیافراگم: f/5.6.
-
ISO: ۱۰۰.
-
فوکوس: AF پیوسته (Tracking).
-
مثال ۲: فیلمبرداری سینمایی از جنگل
-
هدف: Motion Blur طبیعی.
-
تنظیمات:
-
شاتر: ۱/۵۰ ثانیه (برای 24fps).
-
دیافراگم: f/8.
-
ISO: ۲۰۰.
-
فیلتر: ND8.
-
مثال ۳: عکاسی شبانه از شهر
-
هدف: نوردهی متعادل با نویز کم.
-
تنظیمات:
-
شاتر: ۱/۱۰۰ ثانیه (با گیمبال پایدار).
-
دیافراگم: f/2.8.
-
ISO: ۸۰۰.
-
فرمت: RAW برای بهبود جزئیات در post-processing.
-
الف) DJI GO 4
تنظیمات دوربین در نرم افزار DJI GO 4 نقش حیاتی در کیفیت تصاویر و ویدیوهای هوایی دارد. در ادامه، توضیحات فنی دقیقتری برای هر پارامتر ارائه میشود:
-
دیافراگم: تنظیم برای عمق میدان (مثلاً f/5.6 برای کاهش نویز).
-
شاتر: حداقل ۱/۱۰۰۰ ثانیه برای جلوگیری از Motion Blur.
-
ISO: ترجیحاً زیر ۲۰۰ برای کاهش نویز.
-
فوکوس: استفاده از حالت Manuel و بینهایت (∞).
۱. دیافراگم (Aperture)
-
مقدار پیشنهادی:
-
دیافراگم بسته به مدل دوربین (مثلاً در Mavic 2 Pro با سنسور ۱ اینچی) معمولاً بین f/2.8 تا f/11 قابل تنظیم است.
-
f/5.6 به عنوان نقطه شیرین (Sweet Spot) برای تعادل بین عمق میدان (Depth of Field) و وضوح تصویر پیشنهاد میشود.
-
در این مقدار، نویز ناشی از پدیدهی Diffraction (تجزیه نور در دیافراگم های بسته) به حداقل میرسد و جزئیات تصویر حفظ میشود.
-
برای عکاسی از مناظر با عمق میدان گسترده (مثلاً کوهستان)، از f/8 تا f/11 استفاده کنید.
-
۲. سرعت شاتر (Shutter Speed)
-
حداقل سرعت شاتر:
-
۱/۱۰۰۰ ثانیه یا سریعتر برای جلوگیری از Motion Blur ناشی از حرکت سریع پهپاد یا سوژه های متحرک (مثلاً خودروها، حیوانات).
-
در شرایط نوری کم (غروب/طلوع آفتاب)، از قانون معکوس استفاده کنید:
-
سرعت شاتر ≤ ۱/(فاصله کانونی × ۲).
-
مثال: برای لنز ۲۴mm، سرعت شاتر ≤ ۱/۵۰ ثانیه.
-
-
برای ویدیوهای سینمایی، از قانون ۱۸۰ درجه پیروی کنید:
-
سرعت شاتر = ۱/(۲× نرخ فریم). مثلاً برای 24fps، سرعت شاتر ۱/۵۰ ثانیه مناسب است.
-
-
۳. حساسیت سنسور (ISO)
-
محدوده بهینه:
-
ISO 100–200 برای سنسورهای کوچک (مثلاً Mavic Air 2) به دلیل نویز ذاتی در ISOهای بالاتر.
-
در سنسورهای ۱ اینچی (مانند Mavic 3 Classic)، تا ISO 400 نیز کیفیت قابل قبول است.
-
از Auto ISO تنها در شرایط نوری متغیر (مثلاً پرواز از سایه به نور شدید) استفاده کنید، اما حداکثر ISO را روی 800 قفل کنید.
-
۴. فوکوس (Focus)
-
حالت Manuel (دستی):
-
فوکوس دستی روی بینهایت (∞) برای عکاسی از مناظر دوردست (مثلاً کوهها یا شهرها).
-
توجه: علامت ∞ در برخی دوربینها ممکن است دقیق نباشد! برای دقت بیشتر:
۱. از حالت Peaking Focus (رنگهای هایلایتشده روی سوژههای شارپ) در DJI GO 4 استفاده کنید.
۲. با زوم دیجیتال ۲x روی یک نقطه دور، فوکوس را به صورت دستی تنظیم کنید. -
برای عکاسی ماکرو یا سوژه های نزدیک (مثلاً در ارتفاع پایین)، از فوکوس خودکار (AF) استفاده نمایید.
-
۵. تنظیمات تکمیلی
الف) فیلترهای ND (کاهشدهنده نور)
-
کاربرد:
-
در نور شدید، برای حفظ سرعت شاتر ایده آل (مثلاً ۱/۵۰ ثانیه در ویدیو) از فیلترهای ND8/ND16 استفاده کنید.
-
از ND-PL برای کاهش بازتاب نور از سطوح آبی یا شیشه ای بهره ببرید.
-
ب) فرمت تصویر
-
RAW (DNG):
-
برای عکاسی حرفهای، فرمت RAW را فعال کنید تا جزئیات در سایه ها و هایلایت ها در post-processing حفظ شود.
-
حجم فایلهای RAW در Mavic 3 تا ۲۰ مگابایت بر تصویر است.
-
ج) بالانس سفید (White Balance)
-
حالت دستی (Custom WB):
-
برای دقت رنگ بهتر، عدد WB را متناسب با شرایط نوری تنظیم کنید (مثلاً ۵۵۰۰K برای نور روز).
-
از Presetهای مانند «ابری» یا «نور خورشید» در شرایط متغیر اجتناب کنید.
-
۶. ملاحظات پیشرفته
-
تأثیر ابری بودن هوا: کاهش کنتراست ⇒ نیاز به تنظیم Exposure.
-
تست پرواز: اجرای یک پرواز آزمایشی برای بررسی خطاها.
-
ذخیره سازی دادهها: استفاده از کارتهای حافظه با سرعت بالا (UHS-III).
۹. نتیجه گیری
طراحی پرواز اتوماتیک ترکیبی از مهندسی، هنر، و فناوری است. انتخاب پهپاد مناسب، نرم افزار بهینه، و تنظیمات دقیق، موفقیت پروژه را تضمین میکند. در مرحله بعدی، پردازش داده ها و تولید خروجی های نهایی مورد بررسی قرار میگیرد.
مصاحبه تخصصی با مهندس محمد سجاد عزیزی، متخصص حوزه پهپاد

سوال ۱: طراحی پرواز اتوماتیک پهپادها چه پارامترهای حیاتی را شامل میشود و چگونه این پارامترها بر دقت نقشه برداری تأثیر میگذارند؟
پاسخ:
پارامترهای کلیدی شامل ارتفاع پرواز، همپوشانی طولی و عرضی تصاویر (معمولاً ۷۰-۸۰%)، سرعت پرواز، و تنظیمات دوربین (دیافراگم، شاتر، ISO) هستند.
-
ارتفاع: رابطه مستقیم با GSD (فاصله نمونهبرداری زمینی) دارد. ارتفاع ۱۰۰ متر با دوربین GSD 3cm ≈ ۲۰MP ایجاد می کند.
-
همپوشانی: کمتر از ۷۰% همپوشانی طولی، منجر به شکاف در دادههای فتوگرامتری و خطا در مدلسازی ۳D میشود.
-
سرعت: سرعت بالا باعث کاهش زمان پرواز ولی افزایش لرزش تصاویر میگردد. فرمول بهینهسازی:
سرعت (m/s)=GSD (m)×نرخ فریم (Hz)
سوال ۲: در طراحی مسیر پرواز، چگونه نرم افزارهایی مانند Pix4Dcapture یا DJI Pilot 2 به بهبود فرآیند کمک میکنند؟
پاسخ:
-
Pix4Dcapture:
-
امکان طراحی الگوهای پرواز Grid و Circular برای پوشش یکنواخت منطقه.
-
ادغام با نرم افزارهای پردازش ابر نقطه ای مانند Pix4Dmapper برای خروجیهای دقیق.
-
-
DJI Pilot 2:
-
پشتیبانی از سنسورهای چندگانه (LiDAR، حرارتی) و سیستم RTK برای دقت سانتیمتری.
-
قابلیت برنامه ریزی مسیرهای سه بعدی برای بازرسی سازه های مرتفع.
-
سوال ۳: در شرایط جوی نامساعد (بادهای شدید یا نور کم)، چه استراتژی هایی برای حفظ کیفیت داده ها پیشنهاد میکنید؟
پاسخ:
-
بادهای شدید:
-
افزایش همپوشانی تا ۸۵% برای جبران جابجایی پهپاد.
-
استفاده از پهپادهای مولتی روتور با قابلیت Hovering (مانند DJI Matrice 300) به جای بالثابتها.
-
-
نور کم:
-
کاهش سرعت شاتر به ۱/۱۰۰ ثانیه و افزایش ISO تا ۸۰۰ (برای سنسورهای ۱ اینچی مانند Mavic 3 Classic).
-
استفاده از فیلترهای ND/PL برای کاهش بازتاب نور در محیطهای مرطوب.
-
سوال ۴: نقش نقاط کنترل زمینی (GCPs) در پردازش نهایی داده ها چیست؟
پاسخ:
GCP ها با مختصات شناخته شده، خطای انباشته شده در مدلسازی را کاهش میدهند.
-
توزیع بهینه: قرارگیری GCP ها در گوشه ها و مرکز منطقه پروژه.
-
دقت: استفاده از گیرندههای GNSS با دقت میلیمتری (مثلاً Trimble R10) برای ثبت مختصات.
سوال ۵: یک از بزرگترین چالش ها در پروژه های نقشه برداری با پهپاد چیست و چگونه آن را مدیریت میکنید؟
پاسخ:
-
چالش: ناهمگونی داده ها به دلیل تغییرات ناگهانی شرایط جوی یا موانع غیرمنتظره (مثلاً خطوط برق).
-
راهکار:
-
اجرای پرواز آزمایشی قبل از شروع مأموریت اصلی.
-
ترکیب پرواز اتوماتیک با مدیریت دستی در مناطق پرچالش (مثلاً استفاده از حالت Terrain Follow در مناطق شیبدار).
-
سوال ۶: چگونه فناوریهای نوین مانند هوش مصنوعی (AI) در آینده طراحی پرواز تأثیر خواهند گذاشت؟
پاسخ:
-
پیشبینی مسیر: الگوریتمهای AI برای اجتناب از موانع پویا (مانند پرندگان) در لحظه.
-
پردازش دادهها: ادغام سیستمهای Edge Computing برای تحلیل تصاویر در حین پرواز.
-
بهینه سازی انرژی: کاهش مصرف باتری با محاسبه مسیرهای کوتاهتر توسط یادگیری ماشین.
سوال ۷: برای علاقه مندان به حوزه طراحی پرواز، چه مهارت هایی را ضروری میدانید؟
پاسخ:
-
مهارت های نرم افزاری: تسلط بر Mission Planner، UgCS، و نرم افزارهای فتوگرامتری.
-
دانش فنی: آشنایی با مفاهیم آیرودینامیک، پردازش تصویر، و سیستمهای ناوبری (RTK/PPK).
-
تجربه عملی: شرکت در پروژه های میدانی و مدیریت شرایط غیرمنتظره.
جمع بندی:
طراحی پرواز اتوماتیک ترکیبی از دقت مهندسی، خلاقیت، و مدیریت ریسک است. با ادغام فناوری های نوین و درک عمیق پارامترهای فنی، میتوان به نقشه برداری هوایی با کیفیت دست یافت.


بدون دیدگاه