


مدل رقومی سطح زمین (DSM) با استفاده از تکنیک های سنجش از دور و سیستم اطلاعات جغرافیایی
چکیده
ویژگی های بصری محیط های شهری بر ادراک و رفتار انسان تأثیر می گذارد، از جمله انتخاب برای زندگی، تفریح و شیوه های حمل و نقل. اگرچه تجسمهای جغرافیایی پتانسیل زیادی برای اطلاعرسانی بهتر برنامهریزی و طراحی شهری دارند، روشهای محاسباتی برای اندازهگیری واقعی و مدلسازی مناظر شهری و پارک با وضوح کافی در مقیاس خوب وجود ندارد. در این مطالعه، ما یک رویکرد یکپارچه برای اندازهگیری و مدلسازی ویژگیهای منظره در مقیاس خوب یک محیط شهری با کاربری مختلط، یک پارک شهری را توسعه و ارزیابی میکنیم. رویکرد نمای ما با ترکیب مدلهای سطح دیجیتال مبتنی بر لیدار با وضوح بالا، انسداد بصری و محیطهای مجازی فراواقعگرایانه (IVE) ادغام تکنیکهای استخراج مکانی و ادراک را بهبود میبخشد. ما واقعگرایی مدلهای نمای خود را با مقایسه معیارهای ترکیب و پیکربندی منظره با ارزیابیهای سوژه انسانی از IVEها در چندین تنظیمات منظر ارزیابی کردیم. ما همبستگی قوی بین معیارهای منظر و ادراک شرکت کنندگان از باز بودن و طبیعی بودن منظر و همبستگی نسبتاً قوی با پیچیدگی منظر پیدا کردیم. این نتایج نشان میدهد که مدلهای نمای تقویتشده با لیدار میتوانند به اندازه کافی ویژگیهای بصری محیطهای شهری در مقیاس خوب را نشان دهند. یافته ها همچنین حاکی از وجود روابط بین ادراک انسان و الگوی منظر است. رویکرد ما به برنامهریزان و طراحان شهری امکان مدلسازی و ارزیابی مجازی مناظر با وضوح بالا از پارکهای شهری و مناظر طبیعی را با جزئیات در مقیاس ظریفی که قبلاً هرگز نشان داده نشده بود، میدهد. ما همبستگی قوی بین معیارهای منظر و ادراک شرکت کنندگان از باز بودن و طبیعی بودن منظر و همبستگی نسبتاً قوی با پیچیدگی منظر پیدا کردیم. این نتایج نشان میدهد که مدلهای نمای تقویتشده با لیدار میتوانند به اندازه کافی ویژگیهای بصری محیطهای شهری در مقیاس خوب را نشان دهند. یافته ها همچنین حاکی از وجود روابط بین ادراک انسان و الگوی منظر است. رویکرد ما به برنامهریزان و طراحان شهری امکان مدلسازی و ارزیابی مجازی مناظر با وضوح بالا از پارکهای شهری و مناظر طبیعی را با جزئیات در مقیاس ظریفی که قبلاً هرگز نشان داده نشده بود، میدهد. ما همبستگی قوی بین معیارهای منظر و ادراک شرکت کنندگان از باز بودن و طبیعی بودن منظر و همبستگی نسبتاً قوی با پیچیدگی منظر پیدا کردیم. این نتایج نشان میدهد که مدلهای نمای تقویتشده با لیدار میتوانند به اندازه کافی ویژگیهای بصری محیطهای شهری در مقیاس خوب را نشان دهند. یافته ها همچنین حاکی از وجود روابط بین ادراک انسان و الگوی منظر است. رویکرد ما به برنامهریزان و طراحان شهری امکان مدلسازی و ارزیابی مجازی مناظر با وضوح بالا از پارکهای شهری و مناظر طبیعی را با جزئیات در مقیاس ظریفی که قبلاً هرگز نشان داده نشده بود، میدهد. این نتایج نشان میدهد که مدلهای نمای تقویتشده با لیدار میتوانند به اندازه کافی ویژگیهای بصری محیطهای شهری در مقیاس خوب را نشان دهند. یافته ها همچنین حاکی از وجود روابط بین ادراک انسان و الگوی منظر است. رویکرد ما به برنامهریزان و طراحان شهری امکان مدلسازی و ارزیابی مجازی مناظر با وضوح بالا از پارکهای شهری و مناظر طبیعی را با جزئیات در مقیاس ظریفی که قبلاً هرگز نشان داده نشده بود، میدهد. این نتایج نشان میدهد که مدلهای نمای تقویتشده با لیدار میتوانند به اندازه کافی ویژگیهای بصری محیطهای شهری در مقیاس خوب را نشان دهند. یافته ها همچنین حاکی از وجود روابط بین ادراک انسان و الگوی منظر است. رویکرد ما به برنامهریزان و طراحان شهری امکان مدلسازی و ارزیابی مجازی مناظر با وضوح بالا از پارکهای شهری و مناظر طبیعی را با جزئیات در مقیاس ظریفی که قبلاً هرگز نشان داده نشده بود، میدهد.
کلمات کلیدی: چشم انداز ; لیدار ; مشاهده شده ; طراحی شهری ; برنامه ریزی شهری ; جغرافیایی ; ادراک ؛ واقعیت مجازی
1. مقدمه
مشخص شده است که ویژگی های بصری مناظر، مانند پیچیدگی، باز بودن و طبیعی بودن، با ادراک و رفتار افراد مرتبط است [ 1 ، 2 ، 3 ، 4 ، 5 ، 6 ]. این ویژگی ها – به عنوان مثال، با کمیت و تنوع پوشش قابل مشاهده یا با تغییرات در ارتفاعات بیان می شود – قبلاً از عکس های منظره [ 3 ، 4 ، 5 ، 6 ] تحلیل شده است.] ارائه اطلاعات دقیق و دقیق در مورد سایت های نظرسنجی محلی [ 7 ]. تلاش برای گسترش تجزیه و تحلیل در مناطق بزرگتر منجر به رویکردهای GIS شده است که به راحتی خودکار می شوند، اما ممکن است کمتر واقع بینانه تلقی شوند [ 8 ، 9 ، 10 ، 11 ، 12 ، 13 ، 14 ]. به عنوان مثال، تجزیه و تحلیل دید از مناطق قابل مشاهده از یک نقطه نظر داده شده [ 10 ، 11 ، 12] به عنوان راهی برای پیوند نقشه برداری با چشم انداز مرئی استفاده شده است [ 9 ، 13 ، 14 ]. به عنوان مدلسازی چشمانداز مفهومی، محققان شروع به توصیف محتوای چشمانداز قابل مشاهده، مانند کاربری زمین یا سبزی سطح، برای درک بهتر ارتباطات بصری بین افراد و محیط اطراف خود میکنند [ 15 ، 16 ]. تجزیه و تحلیل ترکیب منظره را می توان با محاسبه پیکربندی فضایی مناظر قابل مشاهده (به عنوان مثال، تنوع الگوی [ 17 ]، پیچیدگی شکل [ 18 ]، ناهمواری زمین [ 19 ]) گسترش داد.]) با استفاده از معیارهای منظر از حوزه اکولوژی منظر. منظرههای مبتنی بر مدلهای سطح دیجیتال (DSM)، به جای مدلهای زمین دیجیتال (DTMs) که قبلاً مورد استفاده قرار میگرفتند، شامل ساختارهای عمودی، مانند ساختمانها و پوشش گیاهی میشوند و احتمال کمتری وجود دارد که منطقه منظره را بیش از حد تخمین بزنند [ 16 ]. در جاهایی که دید افقی مهم است، مانند محیط های شهری، ممکن است هنوز به طور ناقص ناحیه قابل مشاهده و ویژگی های مرتبط با آن را نشان دهند (به عنوان مثال، مرجع [ 20 ]]). استفاده از مدلهای منظره برای درک ویژگیهای بصری ویژگیهای با مقیاس دقیقتر در محیطهای شهری تا حد زیادی ناشناخته باقی مانده است. بر خلاف زیست بومهایی که معمولاً مورد مطالعه قرار میگیرند، مانند مرتع و جنگل، که میتوانند شامل مناظر بزرگ و پوشش زمین نسبتاً همگن باشند (به عنوان مثال، مراجع [ 21 ، 22 ، 23 ])، مناظر شهری شامل طیف وسیعی از دید و شرایط فضایی است که از طریق آن شکل میگیرد. تعامل لندفرم های دانه ای و محیط های ساخته شده ناهمگن.
محدودیتهای مقیاس فضایی هم برای دادههای DSM و هم برای دادههای پوشش زمین وجود دارد که برای برآورد واقعی محتوای قابل مشاهده (به عنوان مثال، تعداد درختان و ساختمانهای قابل مشاهده)، و همچنین برای دقت تجزیه و تحلیل متریک منظر (در مراجع [ 24 ، 25 بررسی شده است) وجود دارد. ]). دادههای پوشش زمینی در دسترس عموم اغلب درشت هستند (10 تا 30 متر) و ویژگیهای کوچکتر از اندازه پیکسل خود را نشان نمیدهند (مانند ساختمانها، پیادهروها، تک درختان). اگرچه روشهای پیشرفتهای مانند طبقهبندی مبتنی بر شی یا تشخیص الگو، برای تولید دادههای پوشش زمینی بسیار دقیق از تصاویر ماهوارهای وجود دارد، ترکیب چنین دادههایی در مدلهای منظره نادر بوده است [ 11 ].]. مشکلات در دسترسی به داده های لیدار – رایج ترین منبع داده DSM – باعث شده است که اکثر مدل های نمای فعلی از DSM یا DTM با وضوح پایین استفاده کنند [ 18 ]. این علیرغم تأثیر مستند تفکیک دادههای مکانی بر دقت تحلیل دید [ 9 ، 16 ، 26 ] است. DSM های درشت تر تمایل دارند که دید را در مقایسه با DSM های لیدار ریزدانه، به ویژه در نمای های کوچکتر برآورد کنند [ 26 ]. با این حال، DSM های منبع لیدار ممکن است هنوز برای نمایش واقعی پوشش گیاهی غیر سطحی تلاش کنند ( شکل 1). به طور خاص، DSM های مبتنی بر شطرنجی درختان را به عنوان برآمدگی های جامد نشان می دهند که به طور کامل زیر تاج و از طریق دید تاج پوشش را پنهان می کنند [ 27 ، 28 ]. این یک منبع اصلی خطا برای تخمین دید، به ویژه در تاج پوشش متراکم (پارک ها و راه های سبز)، یا در فصل برگ ریزان زمانی که دید از طریق درختان برگریز محاسبه می شود، است. چندین تکنیک برای غلبه بر این مسئله پیشنهاد شده است، مانند مفهوم نفوذپذیری بصری که احتمال مشاهده یک منطقه را که توسط تراکم فضایی و موقعیت مدلهای درخت تعیین میشود ، توضیح میدهد ، یا مدلسازی انسداد تنه که درختان را با یک درخت جایگزین میکند. مدل صندوق عقب تقریبی [ 28]. در حالی که پیشرفتها در وضوح دادههای مکانی و مدلسازی انسداد پوشش گیاهی به طور جداگانه نویدبخش افزایش دقت تجزیه و تحلیل دید بودهاند، طبق دانش ما، آنها با هم در یک مطالعه واحد برای ایجاد یک مدل منظره با وفاداری بالا مورد استفاده قرار نگرفتهاند.
ارزیابی میزانی که یک مدل منظره میتواند ویژگیهای بصری درک شده را پیشبینی کند، مستلزم مقایسه خروجی مدل با ارزیابیهای سوژههای انسانی از منظره است، که میتواند در محل یا از طریق عکاسی منظره و شبیهسازیهای سهبعدی انجام شود. از آنجایی که اندازهگیریهای درجا اغلب وقتگیر، کار فشرده هستند و عوامل مخدوشکننده متعددی (مثلاً تغییر آب و هوا) را در بر میگیرند، تحقیقات به طور گسترده به نظرسنجیهای آنلاین یا رومیزی با استفاده از عکسها و شبیهسازیهای سهبعدی متوسل شده است [ 18 ]. با این حال، استفاده از محرک های دیجیتال به طور فزاینده ای برای اعتبار بازنمایی آنها مورد بحث قرار می گیرد، با کمترین واقع گرایی گزارش شده برای عکس های مناظر ناهمگن و محیط های شهری با کاربری مختلط [ 7 ].]. یکی دیگر از موانع برای تأیید مدل های نما، عدم تطابق پوشش دید بین عکس های پرسپکتیو و تحلیل دید در GIS است. عکسهای پرسپکتیو میدان دید محدودی دارند (FOV)، در حالی که الگوریتمهای viewshed از الگوریتمهای خط دید 360 درجه برای محاسبه دید برای کل FOV افقی و عمودی استفاده میکنند. محیط های مجازی فراگیر (IVES) که ناظر را در یک محیط مجازی (VE) غوطه ور می کنند، به طور بالقوه می توانند شکاف بین نمای مدل سازی شده و تجربه درجا از منظر شهری را به حداقل برسانند. برخلاف نمایشگرهای دسکتاپ که FOV ها محدود هستند، نمایشگرهای غوطه ور (CAVE یا نمایشگرهای روی سر، HMD) بازخورد بصری پیوسته مرتبط با جهت گیری سر و بدن کاربر را ارائه می دهند و به آن ها اجازه می دهد آزادانه کل ناحیه دید را کاوش کنند. 30 ، حضور [ 31 ]، و ادراک فضایی بهبود یافته (به عنوان مثال، فاصله، عمق) [ 32 ]. IVEها به طور گسترده در علوم زمین فضایی و برنامهریزی شهری، مانند تجسم سه بعدی دادههای نقشه باز [ 33 ]، تجسم سه بعدی در زمان واقعی شبیهسازیهای اکولوژیکی [ 34 ] و طراحی زمین [ 35 ] پذیرفته شدهاند. با این حال، طبق دانش ما، IVE برای تأیید انسانی شبیهسازیهای دید، بهویژه مدلسازی viewscape استفاده نشده است.
هدف از این مطالعه، توسعه و ارزیابی یک رویکرد با وضوح بالا برای اندازهگیری و مدلسازی ویژگیهای منظره در مقیاس خوب محیطهای شهری با کاربری مختلط از طریق یکپارچهسازی جدید تکنیکهای استخراج مکانی و ادراک با استفاده از IVEهای فوتورئالیستی است. ما از دادههای DSM و پوشش زمین با وضوح بالا که از لیدار به دست میآیند برای محاسبه ساختار ریزدانه و الگوهای ناهمگن محیطهای شهری استفاده میکنیم، و دید پوشش گیاهی DSM را با استفاده از مدلسازی انسداد تنه بهبود میدهیم. با این دادههای مکانی بهبودیافته، ترکیب و پیکربندی منظره را با استفاده از رویههای GIS خودکار محاسبه میکنیم. ما به طور منحصربهفرد واقعگرایی مدل منظر حاصل را با کمی کردن ظرفیت آن برای پیشبینی ویژگیهای بصری درک شده ارزیابی میکنیم. برای این، ما یک بررسی ادراک با استفاده از تصاویر IVE گرفته شده از مجموعه ای از مکان ها در سراسر منطقه مورد مطالعه انجام می دهیم. سپس ما معیارهای ترکیب و پیکربندی منظره مشتق شده از مدل منظره را با ارزیابیهای سوژه انسانی IVE مقایسه میکنیم.
ما به طور خاص بر روی سه ویژگی بصری تمرکز می کنیم، یعنی دسترسی بصری، پیچیدگی و طبیعی بودن که به طور گسترده برای اندازه گیری عینی کیفیت چشم انداز بصری استفاده شده اند و نشان داده اند که به شدت با پاسخ های روانی انسان به محیط ها مرتبط هستند [ 1 ، 36 ، 37 ، 38 ، 39 ، 40 ، 41]. با پر کردن شکاف بین تحلیل عینی و ذهنی ویژگیهای بصری، مدلسازی منظره با وضوح بالا به طراحان و برنامهریزان منظر اجازه میدهد تا کیفیتهای زیباییشناختی و ترمیمی یک منظر را به شیوهای واضح فضایی شبیهسازی کنند.
2. روش ها
2.1. منطقه مطالعه
پارک شهری Dorothea Dix 306 هکتار (125 هکتار) در رالی، کارولینای شمالی (35’46° شمالی، 78’39° W؛ شکل 2 ) را پوشش می دهد. این چشم انداز با توپوگرافی موج دار و پوشش زمین ناهمگن مشخص می شود. پوشش گیاهی از علفزارهای چمنزار، گیاهان چند ساله علفی، کاجهای شرقی و لوبلی، بلوطهای بید و سرخ شرقی، و انواع درختان و درختچههای محوطهسازی متفاوت است. به عنوان یک پردیس بیمارستان روانی گذشته، این سایت شامل ساختمانهای متعددی از جمله بیمارستان بسته، ساختمانهای اداری و تعمیر و نگهداری و مسکن متروکه کارکنان، و همچنین شبکهای از جادههای آسفالتشده ( dixpark.org ) است.). برخی از ساختمان ها در حال حاضر توسط وزارت بهداشت و خدمات انسانی NC مورد استفاده قرار می گیرند. ترکیبی از انواع چشماندازهای متنوع و ویژگیهای فضایی طیف وسیعی از شرایط باز بودن، پیچیدگی و طبیعی بودن را فراهم میکند و سایت انتخابشده را برای اهداف این مطالعه مناسب میسازد.
2.2. مدلسازی چشم انداز
برای مدلسازی مناظر شهری، ابتدا DSM و نقشه پوشش زمین با وضوح بالا را توسعه میدهیم. سپس، ما دید مناظر محاسبهشده از DSM را با استفاده از مدلسازی پوشش گیاهی بهبود یافته برای دید در زیر تاجهای درختان برگریز بهبود میدهیم. در نهایت، ما ویژگیهای بصری در مقیاس دقیق ویژگیها را در یک محیط شهری با کاربری مختلط با اندازهگیری ترکیب و پیکربندی مناظر نمایش میدهیم.
2.2.1. مدل دیجیتال سطح (DSM) و پوشش زمین
برای توسعه نقشه DSM و پوشش زمین، از سه مجموعه داده جغرافیایی، از جمله لیدار هوابرد، تصویربرداری چند طیفی از پوشش گیاهی و جاده و داده های برداری ساختمان استفاده کردیم. دادههای چندگانه لیدار بازگشتی در 11 ژانویه 2015 (برگزدگی) با میانگین چگالی 2 نقطه بر متر مربع و دقت عمودی اساسی (FVA) 18.2 سانتیمتر (فاز 3–2015 NC QL2 lidar، https://sdd ) به دست آمد. .nc.gov/). ابر نقطه لیدار توسط ارائه دهنده داده به چندین کلاس از جمله پوشش گیاهی زمینی و کم، متوسط و بالا طبقه بندی شد. دو مجموعه از تصاویر ارتویماژی استفاده شد: یک تصویر ارتویماژی با وضوح 30 سانتیمتری که در اوایل سال 2015 در شرایط برگی گرفته شد (WMS، 2015)، و یک تصویر چهار باند با وضوح 1 متر که در تابستان 2014 در شرایط برگ (NAIP، USDA Farm) گرفته شد. آژانس خدمات، 2014).
DSM با درونیابی نقاط لیدار اولین بازگشت با وضوح نیم متر توسعه داده شد. ما از یک spline منظم با الگوریتم کشش پیادهسازی شده در GRASS GIS [ 42 ] برای متعادل کردن صافی و دقت تقریبی سطح استفاده کردیم. پوشش زمین با ترکیب سه لایه ایجاد شد ( شکل 3 ):
-
مدل ارتفاع تاج پوشش (CHM) از طریق فیلتر کردن و درونیابی نقاط پوشش گیاهی لیدار و کم کردن ارتفاع آنها از ارتفاع زمین به دست آمد ( شکل 3 a). ما یک روش طبقهبندی نظارت شده [ 43 ] را برای لایههای تصاویر فروسرخ (NAIP)، مقادیر حداکثر پوشش گیاهی لیدار، و تصویربرداری ارتویمی برای طبقهبندی CHM به مناطق جنگلی مختلط، همیشه سبز و برگریزان اعمال کردیم ( شکل 3 ب).
-
لایه پوشش زمین شامل سطوح چمنزار، علفی و سطوح بدون سنگفرش است که به صورت دستی در تصویر ارتویماژی با وضوح 30 سانتی متر دیجیتالی شده است.
-
ساختمانها و سطوح سنگفرش شده (مثلاً خیابانها، سطح پارکینگ)، که از خط برداری و دادههای چند ضلعی شطرنجی شدهاند ( شکل 3 ج؛ دادههای بازیابی شده از مجموعه دادههای GIS شهر رالی؛ رالی، NC، سرور دادههای باز ایالات متحده، https:// data-ral.opendata.arcgis.com/ ).
2.2.2. مدلسازی انسداد تنه
برای ترسیم ساختارهای پوشش گیاهی که بر روی دید تأثیر میگذارند، ما به صورت بصری نقاط لیدار و تصاویر مزرعه را بررسی کردیم و سه ساختار اصلی را شناسایی کردیم ( شکل 4 ): (الف) لکههای انبوه همیشه سبز (عمدتاً کاجهای لوبلی) با زیرزمینی متراکم (عمدتاً درختچههای چوبی و انگور)، (ب) ) طبقه بیش از حد همیشه سبز مخلوط با طبقه میانی خزان کننده (عمدتاً افرا قرمز و صمغ شیرین) و زیر طبقه، و (ج) گونه های برگریز پراکنده متشکل از بید بزرگ و بلوط قرمز شمالی، افرا و درختان محوطه سازی. در حالی که دو سازه قبلی عمدتاً یا کاملاً غیرقابل نفوذ بودند، سازه سوم دید قابل توجهی از زیر تاج و از طریق تاج پوشش در شرایط برگی داشت.
برای غلبه بر خطای دید سایبان های برگریز، از روش مدل سازی انسداد تنه پیشنهاد شده توسط Murgoitio [ 28 ] استفاده کردیم که نشان داده شده است به طور قابل توجهی تخمین دید کوتاه برد را بهبود می بخشد. این روش شامل ترسیم درختان منفرد از ابر نقطه لیدار و جایگزینی آنها در DSM با اندازه گیری عرض تنه تقریبی است. برای انجام این کار، با استفاده از Geomorphons [ 44 ]، تک تک درختان را از DSM ترسیم کردیم – الگوریتمی که از اصول تشخیص الگو برای شناسایی و طبقهبندی شکلهای زمین در یک مدل ارتفاعی استفاده میکند ( شکل 5 a). ژئومورفون ها می توانند با دقت بالای درختان توده های برگریز و مخروطی را در ساختارهای پیچیده جنگلی شناسایی کنند. 45 ]. ما قله ها را از نقشه شطرنجی طبقه بندی شده لندفرم (رزولوشن 0.5 متر) برای ترسیم چند ضلعی های بالای درخت استخراج کردیم و از مرکز آنها برای تعیین مکان و ارتفاع تنه درخت استفاده کردیم. ما فرض کردیم که راس سایبان با محل تنه در یک خط عمودی مستقیم با زمین مطابقت دارد. بر اساس اندازهگیریهای میدانی و تفکیک مکانی دادهها، از قطر 1 متر برای گونههای بزرگتر (بلوط) و قطر 0.5 متر برای گونههای کوچکتر استفاده کردیم. در نهایت، سایبان های برگریز در DSM با تنه های تقسیم شده جایگزین شدند تا مدل سطح بهبود یافته ایجاد شود.
2.2.3. محاسبه معیارهای Viewscape
برای به دست آوردن معیارهای نمای، ترکیب و پیکربندی نماهای محاسبه شده از 342 دیدگاه (مرکز یک شبکه 30 متری) را در سراسر منطقه مورد مطالعه اندازه گیری کردیم. بنابراین، ما یک ناظر را در هر 30 متر در سراسر سایت فرض کردیم تا بتواند ویژگی های بصری سایت را نشان دهد. نماها در DSM در سطح متوسط چشم انسان (1.65 متر) محاسبه شدند و حداکثر فاصله دید 3000 متر در نظر گرفته شد، بر اساس محدوده دید برآورد شده توسط یک تجزیه و تحلیل اولیه نمای دید. ما از تابع viewshed GRASS GIS استفاده کردیم که از یک الگوریتم محاسباتی کارآمد برای جابجایی خط مناسب برای انجام محاسبات viewshed در یک DSM با وضوح بالا استفاده میکند [ 16 ، 46]. این الگوریتم یک خط رفت و برگشت را در اطراف سلول ناظر می چرخاند و دید هر سلول را هنگامی که خط جارو از مرکز آن عبور می کند تعیین می کند.
معیارهای محاسبه شده نمای منظر شامل 19 شاخص چشم انداز است که نشان دهنده ویژگی های بصری است و قبلاً برای پیش بینی ادراکات انسان و ترجیحات چشم انداز نشان داده شده است [ 18 ]. معیارهای ترکیب، محتوای بصری یک منظره را مشخص میکند و مشخص میکند که ناظر چه ویژگیهای چشماندازی را میتواند از یک نقطه دید مشخص ببیند [ 18 ، 47 ]. برای محاسبه این معیارها، نقشه نمای باینری (قابل مشاهده یا غیرقابل مشاهده) ( شکل 5 الف) را با نقشه پوشش زمین ( شکل 5 ب) قطع کردیم تا یک نقشه پوشش زمین قابل مشاهده به دست آوریم ( شکل 5)ج) که از روی آن حضور متناسب هر پوشش زمین در منظره را محاسبه کردیم.
معیارهای پیکربندی آرایش فضایی و رابطه بین انواع مختلف پوشش زمین را اندازه گیری می کند. آنها شامل (1) سطح نمای کلی (وسعت)، (2) فاصله تا دورترین ویژگی قابل مشاهده (عمق)، (3) تنوع ارتفاعی سطح زمین قابل مشاهده (نقش برجسته)، (4) تغییر ارتفاع از سطح قابل مشاهده از سطح زمین بودند. ویژگی ها (خط آسمان)، (5) اندازه سطح زمین قابل مشاهده (افقی)، (6) تغییرپذیری عمق (VdepthVar)، (7) تعداد تکه ها (Nump)، (8) پیچیدگی اشکال وصله (SI و ED) ، (9) اندازه تکه ها (PS)، (10) تراکم لکه ها (PD) و (11) تنوع نوع زمین که به عنوان شاخص تنوع شانون (SDI) اندازه گیری شد. عمق و وسعت مستقیماً از نقشه نمای باینری محاسبه شد ( شکل 5آ). برای محاسبه معیارهای افقی، برجستگی و خط آسمان، نقشه نما با یک DEM زمین برهنه ( شکل 5 د) و DSM ( شکل 5 e) تقاطع شد تا نقشههای جداگانه دید زمین (نمای افقی؛ شکل 5 f) و دید بالای زمین ایجاد شود. (نمای عمودی؛ شکل 5 g)، به ترتیب. معیارهای باقیمانده (Nump، SI، ED، PS، PD، و SDI) از نقشه پوشش مرئی ( شکل 5 ج) استخراج شد و با استفاده از تحلیل متریک منظر [ 48 ] اندازهگیری شد. تعریف متغیرها و فرمول های محاسباتی در زیر توضیح داده شده است.
شاخص تنوع شانون (SDI) اندازه گیری تنوع الگو با در نظر گرفتن تعداد طبقات پوشش زمین و نسبت توزیع است. مقادیر بالاتر SDI نشان دهنده افزایش تعداد کلاس ها یا حتی توزیع یا هر دو است. می توان آن را به صورت زیر محاسبه کرد، جایی که i نوع پچ است، m تعداد انواع پچ های مختلف و p i فراوانی متناسب پچ نوع i است :
اسD I= –∑i = 1متر پمن l n (پمن )
شاخص شکل (SI) لکههای قابل مشاهده را بر اساس نسبت محیط به مساحت مشخص میکند که در آن E مجموع تمام لبههای وصله و A مجموع تمام نواحی وصله است. پیچیدگی شکل کمتر نشان دهنده نماهای منسجم تر است.
اسمن=0.25 Eآ––√
تراکم لبه (ED) اندازهگیری طول بخشهای لبه در هکتار را فراهم میکند و به لکهای و شکل وصله بستگی دارد. مقدار بالا نشان دهنده درجه کم تنوع بین بزرگترین و کوچکترین پچ است. E مجموع طول تمام بخش های لبه است و A کل مساحت چشم انداز است:
ED =Eآ( 10000 )
تعداد تکه ها (Nump) تعداد تکه های چشم انداز را توصیف می کند و میزان تکه تکه شدن یا نبودن منظره را توضیح می دهد. مقادیر بالاتر Nump نشان دهنده چیدمان پراکنده تر است. اندازه وصله (PS) اندازه متوسط وصلهها در کل ناحیه دید با مقدار کمتری است که نشاندهنده ترکیب دانهدارتر یک نما است. تراکم پچ (PD) تعداد وصله ها در هر منطقه است. مقدار بالاتر نشان دهنده ناهمگونی بیشتر و کاهش انسجام چشم انداز است.
کل گردش کار تجزیه و تحلیل GIS و اتوماسیون ( شکل 5 )، از طریق یک اسکریپت پایتون در GRASS GIS انجام شد (میتوانید در Supplementary Materials پیدا کنید).
2.3. بررسی محیط مجازی فراگیر (IVE) از ویژگی های بصری درک شده
برای تأیید واقعی بودن مدل منظر و ارزیابی ظرفیت آن برای پیشبینی ویژگیهای بصری درک شده، ما یک بررسی از ویژگیهای بصری درک شده با استفاده از محرکهای IVE انجام میدهیم که طیفی از مناظر شهری را در منطقه مورد مطالعه نشان میدهند. در زیر، فرآیند انتخاب مکانهای دیدگاه و روش ایجاد صحنههای IVE از عکسهای جمعآوریشده از این دیدگاهها را شرح میدهیم و سپس جزئیات روش بررسی را توضیح میدهیم.
2.3.1. محرک های IVE
برای انتخاب دیدگاهها برای راستیآزمایی مدل، معیارهای نمای دید را با استفاده از دو معیار ارزیابی کردیم: (1) ویژگیهای بصری دیدگاههای انتخابشده باید تقریباً محدوده مقادیر 342 دیدگاه را نشان دهند. و (2) نماها باید حداقل دو سلول شبکه (60 متر) از هم فاصله داشته باشند تا اطمینان حاصل شود که کل منطقه مطالعه نشان داده شده است. یک نمونه 24 امتیازی این معیارها را برآورده کرد و برای تهیه عکس در نظر گرفته شد ( شکل 6 ).
نماها با استفاده از دستگاه GPS دستی (Trimble Geo5t) قرار گرفتند. در هر مکان، با استفاده از دوربین Canon Eos 70D که بر روی یک پایه رباتیک نصب شده بود، مجموعهای از 54 عکس (9 × 6) در سطح چشم (1.65 متر) گرفتیم (Gigapan Epic Pro؛ شکل 7 ). ما تصاویر را برای به دست آوردن یک تصویر پانوراما 25 مگاپیکسلی با یک تصویر کروی، به عنوان مثال، تصویر هممستطیل شکل، دوختیم ( شکل 7 ب). سپس، از طریق فرآیندی به نام نگاشت مکعبی [ 49 ]، هر تصویر متساوی الاضلاع در شش وجه مکعبی باز شد ( شکل 7 ج). در تنظیمات واقعیت مجازی، این چهره ها به عنوان یک محیط مکعبی در اطراف بیننده پیچیده می شوند ( شکل 7)د). عکسها طی چهار روز در فوریه ۲۰۱۷، در شرایط آب و هوایی و نوری مشابه گرفته شدهاند.
2.3.2. روش بررسی
در مجموع، 100 دانشجوی مقطع کارشناسی در دانشگاهی در جنوب شرقی ایالات متحده در این مطالعه شرکت کردند. میانگین سنی شرکت کنندگان 19.56 سال ( SD = 3.17) بود. 51 درصد مرد ( 51 نفر) و 70 درصد سفیدپوست ( 70 نفر) بودند. سابقه مطالعه شرکت کنندگان متفاوت بود. 47 درصد از مدیریت تفریحی و گردشگری پارک ها، 25 درصد از مدیریت ورزشی و 28 درصد از رشته های علوم طبیعی و اجتماعی بوده اند. شرکت در این مطالعه داوطلبانه بود و کسانی که داوطلب شدند در یک قرعه کشی تصادفی برای یکی از ده کارت هدیه 25 دلاری به یک تاجر آنلاین وارد شدند. پروتکل مطالعه توسط هیئت بررسی نهادی دانشگاه تایید شد.
برای اندازهگیری ویژگیهای بصری درک شده، سه مورد را انتخاب کردیم که پیوندهای قوی با پاسخهای روانشناختی انسان نشان دادهاند. دسترسی بصری درک شده (که مقیاس بصری نیز نامیده می شود)، که به طور گسترده به عنوان اندازه، شکل، تنوع، و درجه باز بودن چشم انداز تعریف می شود، نشان داده شده است که پیوندهایی با ایمنی درک شده [ 36 ] و اولویت [ 41 ] دارد. با استفاده از یک سوال بدون اشاره صریح به باز بودن اندازهگیری شد: «چقدر میتوانید تمام قسمتهای این محیط را بدون مسدود شدن یا تداخل دیدتان ببینید؟» [ 46]. گزینه های پاسخ از 0 = اصلاً تا 10 = بسیار آسان بود. طبیعی بودن درک شده، به عنوان میزانی که منظره به حالت طبیعی درک شده نزدیک است [ 40 ، 50 ]، که با بازسازی درک شده [ 37 ] و بازیابی استرس [ 38 ] ارتباط دارد، تعریف می شود. این با یک سوال واحد اندازه گیری شد: “چقدر این محیط را طبیعی می بینید؟” با استفاده از یک مقیاس 11 نقطه ای با 0 = طبیعی نیست، 10 = بسیار طبیعی [ 51 ]. برای پیچیدگی درک شده – در شکل گیری اولویت بصری مهم است [ 1 ، 39 ، 52]—شرکت کنندگان به این بیانیه پاسخ دادند «چقدر این محیط را پیچیده می بینید؟ با استفاده از یک مقیاس 11 نقطه ای، 0 = اصلا، 10 = بسیار پیچیده [ 53 ].
بررسی IVE در یک محیط آزمایشگاهی کنترل شده انجام شد. به محض ورود شرکت کنندگان، یک محقق به آنها کمک کرد تا نمایشگر روی سر (HMD) (Oculus CV1) را بپوشند و تنظیم کنند، چرخش را تمرین کنند و با کنترل کننده جوی استیک تعامل کنند. برای آشنایی شرکتکنندگان با تجربه غوطهور شدن و پاسخ به یک نظرسنجی روی صفحه، آنها دو صحنه مدل IVE را تجربه کردند که یک میدان شهری و یک پارک را به تصویر میکشید. برای هر صحنه، آنها به سه بیانیه که واقع گرایی درک شده و حضور در محیط مجازی را اندازه گیری می کردند، پاسخ دادند.
پس از مرحله گرم کردن، هر پاسخگو 24 IVE نمایش داده شده به طور تصادفی را با یک فاصله 2 دقیقه ای پس از صحنه دوازدهم تجربه کرد. هر یک از صحنههای IVE فقط بر اساس یکی از متغیرهای پاسخ (دسترسی بصری درک شده، پیچیدگی درک شده، و طبیعی بودن درک شده) رتبهبندی میشد و متغیر برای رتبهبندی بهطور تصادفی توسط برنامه VR در شروع مطالعه انتخاب شد. حجم نمونه نهایی 32 برای «دسترسی بصری»، 34 برای «طبیعی بودن» و 34 برای «پیچیدگی» بود. اجرای هر سه سوال برای شرکت کنندگان می توانست قدرت آماری ما را افزایش دهد، اما مطالعه آزمایشی ما (شماره= 11) نشان داد که پاسخ دادن به سوالات متعدد برای هر IVE می تواند منجر به خستگی و سردرگمی شرکت کنندگان شود. با انجام این کار، ما همچنین از سوگیری انتقال، که تأثیر احتمالی سؤالات قبلی بر سؤالات بعدی است، اجتناب کردیم [ 54 ].
شرکت کنندگان هر صحنه را به مدت 25 ثانیه تجربه کردند، پس از آن، یک جعبه گفتگوی نیمه شفاف حاوی آیتم نظرسنجی بر روی HMD نمایش داده شد. هیچ محدودیت زمانی در مرحله پاسخ وجود نداشت که به پاسخ دهندگان این امکان را می داد تا آزادانه محیط غوطه ور را کاوش کنند و در ادامه تجربه صحنه به عبارت (با استفاده از کنترل کننده جوی استیک) امتیاز دهند. کل مراحل آزمایش به عنوان یک اسکریپت پایتون توسعه داده شد و در نرم افزار توسعه World Vizard VR (WorldViz Inc، نسخه 5.4) اجرا شد.
پس از جلسه آزمایشی، شرکت کنندگان یک نظرسنجی کوتاه با قلم و کاغذ، شامل سؤالاتی در مورد سن، نژاد، جنسیت و رشته تحصیلی پر کردند. مدت زمان کل هر جلسه به طور متوسط 40 دقیقه (محدوده 37-46) بود. داده ها طی چهار هفته در مارس 2017 جمع آوری شد.
2.4. ارزیابی مدل Viewscape
ما از تجزیه و تحلیل رگرسیون خطی چندگانه استفاده کردیم تا ارزیابی کنیم که چگونه مدل منظره ارائه شده توسط 19 معیار سنجه دید، سه ویژگی بصری درک شده، یعنی درک دسترسی بصری، درک پیچیدگی، و درک طبیعی بودن را پیشبینی میکند. مطالعه ما یک طرح درون آزمودنی داشت، به این معنی که هر شرکتکننده تمام 24 صحنه (یا طرح) را تجربه کرد و تنها به یکی از سه متغیر وابسته پاسخ داد. به این ترتیب، واحد تجزیه و تحلیل، رتبهبندی شرکتکننده از یک صحنه بود. سه مدل انتخاب متغیر گام به گام جداگانه بر اساس به حداقل رساندن معیار اطلاعات Akaïke (AIC) برای برازش بهترین مدل پیش بینی برای هر متغیر وابسته به کار گرفته شد. برای هر یک از مدل های رگرسیون، همانطور که توسط Hair و همکاران پیشنهاد شده است، همخطی بودن را با استفاده از فاکتور تورم واریانس (VIF) تشخیص دادیم تا متغیرهایی با تحمل بزرگتر از 0.1 و VIF کوچکتر از 10 را شامل شود. [ 55 ]. قدرت پیشبینی مدلهای رگرسیون با استفاده از ضرایب تعیین تعدیلشده ( R2 adj ) ، و سهم نسبی هر متغیر در مدل با استفاده از ضرایب رگرسیون استاندارد گزارش شده است.
3. نتایج
3.1. مدلسازی چشم انداز
نقشه پوشش زمین حاصل ( شکل 8 ) که با ترکیب CHM، تصاویر ارتویماژی با وضوح بالا دیجیتالی و مجموعه داده های رسمی جاده ها و ردپاهای ساختمان تهیه شده بود، وضوح 0.5 متر داشت و شامل هشت طبقه پوشش زمین بود که بر اساس طبقه بندی مجموعه داده های پوشش ملی (NLCD) طبقه بندی شده بودند. با اعمال الگوریتم ژئومورفون ها ( شکل 9 الف) بر روی DSM با وضوح بالا درون یابی، ما با موفقیت درختان را شناسایی کردیم ( شکل 9 ب) و بر اساس پوشش زمین، درختان برگریز در DSM را با تنه آنها جایگزین کردیم. شکل 9c،d با مقایسه نمای مدلسازی شده قبل و بعد از مدلسازی انسداد تنه، بهبود برآوردهای دید کوتاه برد را نشان میدهد. ما 19 سنجه نمای از 342 نقطه دید را محاسبه کردیم که در یک شبکه 30 متری در سراسر منطقه مورد مطالعه توزیع شده است. از این دیدگاهها، ما 24 مکان را انتخاب کردیم که تقریباً محدوده مقادیر همه دیدگاهها را با شرایطی که حداقل در فاصله 60 متری از هم توزیع میشوند تا کل منطقه مورد مطالعه را نشان دهند، انتخاب کردیم. جدول 1 مقادیر محاسبه شده معیارهای نمای ترکیب و پیکربندی را برای آن 24 دیدگاه انتخاب شده نشان می دهد.
3.2. بررسی محیط مجازی فراگیر
میانگین مقادیر دسترسی بصری درک شده از IVEها بین 1.85 و 10.62 متغیر بود ( جدول 2 ). مقادیر بسیار بالایی به مناظر با مناظر طولانی و مناطق دید بزرگ (صحنه های 21، 14) اختصاص داده شد و مناظر محصور در جنگل ها، تپه ها و ساختمان ها (صحنه های 1، 10، 13) کمترین مقدار را به دست آوردند. مدل رگرسیون انتخاب شده برای دسترسی بصری درک شده شامل 11 متغیر بود و یک ضریب تعیین تعدیل شده ( R 2 adj ) 0.65، p <.001 ( جدول 3 ) تولید کرد (جدول 3).). میزان بیشترین سهم مثبت را در مدل داشت و پس از آن Viewdepth_var و Depth قرار گرفتند. Skyline و Relief به ترتیب با دسترسی بصری درک شده همبستگی منفی داشتند. از معیارهای ترکیبی، ساختمان تأثیر منفی شدیدی بر دسترسی بصری درک شده داشت، در حالی که Deciduous و Paved به طور مثبت به مدل کمک کردند. در میان معیارهای پیکربندی، ED (تراکم لبه) قویترین سهم منفی را در مدل داشت، در حالی که Nump (تعداد وصلهها) ارتباط مثبتی با دسترسی بصری درک شده داشت.
ادراک طبیعی بودن از 1.68 و 10.31 متغیر بود ( جدول 2 ). منظرههایی که پوشش گیاهی، جنگلهای مختلط، و سطوح سنگفرش نشده را به تصویر میکشند، بالاترین رتبهبندی را دریافت کردند (صحنههای 1، 2، 3) و آنهایی که در مناطق بسیار ساخته شده با پوشش گیاهی کمی هستند، کمترین رتبهبندی را دریافت کردند (صحنههای 20، 23). با انتخاب 9 متغیر، مدل رگرسیون 62 درصد از تغییرات در طبیعی بودن درک شده را توضیح داد ( R2 adj = 0.62, p<.001). اکثریت تغییرات با معیارهای ترکیبی توضیح داده شد. پوشش چمن بیشترین همبستگی مثبت را با طبیعی بودن درک شده داشت و پس از آن پوشش مخلوط، علفی و خزان کننده قرار گرفتند. همبستگی معکوس معنی داری برای ساختمان یافت شد. از معیارهای پیکربندی، Relief و Nump سهم مثبتی داشتند و SI سهم منفی در مدل داشت.
ادراک پیچیدگی از 2.29 تا 9.09 متفاوت بود ( جدول 2 ). کمترین مقادیر به نماهایی با کمترین SDI (صحنه های 1 و 10) اختصاص داده شد، در حالی که آنهایی که بالاترین SDI را داشتند به عنوان بسیار پیچیده درک شدند. با انتخاب هفت ویژگی بصری، مدل 42 درصد از تغییرات در پیچیدگی درک شده را توضیح داد ( R2 adj = 0.42، p <001). بیشتر سهم از متغیرهای پیکربندی بود ( جدول 3). در این میان، Nump بیشترین تاثیر مثبت را داشت و پس از آن SDI و ED قرار گرفتند. تسکین و خط آسمان – اندازهگیریهای تغییرپذیری عمودی زمین و بالای زمین – هر دو به طور مثبت بر پیچیدگی درک شده تأثیر گذاشتند، در حالی که عمق همبستگی منفی داشت. از معیارهای ترکیب، پوشش نسبی ساختمان تنها و دارای بیشترین همبستگی مثبت با پیچیدگی درک شده بود.
4. بحث
هدف از این مطالعه توسعه و ارزیابی یک رویکرد با وضوح بالا برای مدلسازی ویژگیهای منظره در مقیاس خوب محیطهای شهری با کاربری مختلط بود. ما از دادههای فضایی با وضوح بالا و روش مدلسازی پوشش گیاهی بهبود یافته برای توسعه یک مدل منظره که برای دانهبندی و ناهمگونی محیطهای شهری با کاربری مختلط استفاده میکند، استفاده کردیم. با استفاده از ارزیابیهای آزمودنی انسانی از IVEهای گرفتهشده از منطقه مورد مطالعه، ظرفیت مدل منظره را برای پیشبینی سه ویژگی بصری درک شده، یعنی دسترسی بصری، طبیعی بودن و پیچیدگی ارزیابی کردیم. نتایج ما نشان میدهد که با رویکرد پیشنهادی ما، مدلهای منظره میتوانند به طور قابل اعتمادی ویژگیهای بصری محیطهای پارک شهری را به تصویر بکشند. یافتهها همچنین روابط بین پیکربندی و ترکیب منظر و ادراکات مورد بررسی را تأیید میکنند.
4.1. پیش بینی ویژگی های بصری درک شده
از نظر آماری، مدلهای نمای ما برای دسترسی بصری درک شده، طبیعی بودن و پیچیدگی، نتایجی با قدرت توضیح خوب ارائه میدهند. مدلهای رگرسیون تقریباً 65 درصد از واریانس ادراک را در بهترین حالت (طبیعی بودن، دسترسی بصری) و تا 45 درصد در بدترین حالت (پیچیدگی) را توضیح میدهند. این نتایج با نتایج یک تحلیل مشابه توسط Schirpke و همکاران قابل مقایسه است. [ 14 ] و صحراوی و همکاران. [ 18 ] که ادراک مناطق کوهستانی و حاشیه های شهری- روستایی را به ترتیب با استفاده از مناظر تخمین زد.
با توجه به معیارهای انتخاب شده برای مدل دسترسی بصری، تجزیه و تحلیل نشان می دهد که میزان (اندازه دید) و عمق تأثیر مثبت قوی بر دسترسی بصری درک شده دارد. این یافته مطابق با مطالعات موجود است که نشان می دهد فاصله ناظر بین عناصر مبهم (عمق) و مقدار فضای قابل مشاهده (وسعت) تأثیر زیادی بر دسترسی بصری درک شده دارد [ 41 ، 56 ، 57 ]. تغییر عمق – تغییر فضایی عمق دید [ 18] – همچنین تأثیر مثبتی بر دسترسی درک شده نشان داد. این شاخص مشابه «تعداد اتاقهای ادراکی» است، که یکی از تعیینکنندههای اصلی دسترسی بصری است، همانطور که Tveit [ 57 ] پیدا کرد. یک یافته جالب به نقش منفی قوی ساختمان ها و نقش مثبت درختان برگریز در دسترسی بصری درک شده مربوط می شود که بر اهمیت نفوذپذیری (تخلخل) عناصر مبهم تأکید می کند. در واقع، در فصل برگریزی، جنگلهای برگریز در مقایسه با جنگلهای همیشه سبز و مختلط، امکان دید بیشتری را از طریق شاخهها فراهم میکنند. به طور مشابه، سطوح افقی نسبت کمتری از چشم انداز قابل مشاهده را اشغال می کنند، بر خلاف ساختمان هایی که توسعه عمودی آنها منجر به برجستگی بصری قابل توجهی می شود.
برای طبیعی بودن درک شده، ما نقش مثبتی را توسط فضاهای سبز و پوشش زمین طبیعی، مانند علفزارها و پوشش گیاهی، یافتیم که با آنچه به طور کلی در ادبیات گزارش شده است، سازگار است. برخلاف مطالعات قبلی که همه گونهشناسیهای جنگل را بهعنوان یک پوشش جنگلی واحد ترکیب میکردند، ادغام پوشش زمین ریزدانه، مدل ما را قادر ساخت تا بین انواع جنگلها تمایز قائل شود و تفاوتهای ادراک بین آنها را آشکار کرد. جنگلهای مختلط متشکل از بیش از دو نوع توده و به وفور توسط خزهها و گلسنگها پوشیده شدهاند، طبیعیتر از نمونههای برگریز و همیشه سبز تلقی میشوند، که به موازات مطالعات قبلی نشان میدهد که بازنمایی کمتر و متنوع پوشش گیاهی تأثیر مثبتی بر طبیعی بودن درک شده دارد [ 2 ]، 57 ]. همچنین، همانطور که انتظار می رفت، عناصر ساخته شده توسط انسان مانند ساختمان های مسکونی یا اداری، بر قضاوت های طبیعی بودن تأثیر منفی داشتند. ما همچنین تأثیر قوی Relief را پیدا کردیم که نشان میدهد مناظر با تنوع عمودی بالاتر یا زمینهای ناهموار طبیعیتر تلقی میشوند. اگرچه چندین مطالعه سهم مثبت Relief را در ترجیحات زیبایی شناختی تایید کرده اند، هیچ مدرک قبلی در مورد روابط با طبیعی بودن درک شده به عنوان مبنایی برای مقایسه وجود ندارد.
برخلاف انتظارات ما با توجه به ادبیات مربوط به ویژگیهای چشمانداز بصری [ 2 ]، شاخص شکل و تعداد تکههای قابل مشاهده ارتباط مثبتی با طبیعی بودن درک شده داشتند. به طور کلی پیشنهاد می شود که شکل وصله متنوع تر ممکن است در مقایسه با یک لبه مستقیم طبیعی تر تلقی شود [ 40 , شود]، و مناظر متشکل از تکه های کوچک و تکه تکه ممکن است در مقایسه با آنهایی که دارای یک تکه جنگلی بزرگ هستند، کمتر طبیعی تفسیر شوند. ما حدس می زنیم که در مورد معیارها، مانند شکل و نمایه لبه، دیدگاه ها مصنوعات هندسی را معرفی می کنند. به عبارت دیگر، شاخص شکل (SI) ممکن است بیشتر نشاندهنده بینظمی شکل نمای دید نسبت به تکههای منظرهای باشد که در نما دیده میشود، و پاسخدهندگان ممکن است لزوماً مرزهای نمای نما را مرتبط با طبیعی بودن تلقی نکنند. این بیشتر توسط مناطق تکه تکه شده و “حفره” ایجاد شده توسط تجزیه و تحلیل viewshed تشدید می شود.
با عطف به مدل پیچیدگی درک شده، ناهمگونی پوشش زمین (SDI)، تراکم لبه (ED) و تعداد تکه های قابل مشاهده (Nump) قوی ترین تأثیر را داشتند، که تأیید می کند آنچه به طور کلی در کار روانشناسی محیطی گرا گزارش شده است که این تعداد (غنا) و/یا را نشان می دهد. تنوع (آرایش) چشم انداز مرئی تأثیر زیادی بر پیچیدگی درک شده و ترجیحات زیبایی شناختی دارد [ 59 ، 60 ]]. مطالعات قبلی با استفاده از متریک های منظر برای محاسبه پیچیدگی، به طور کلی منظر را به عنوان یک سطح پلان سنجی فرض می کردند و بر ناهمگونی افقی (پوشش زمین) متمرکز بودند. ما منظره را به عناصر سطح و بالای سطح تشریح کردیم تا دو عامل ناهمگونی عمودی، برجستهسازی و تغییرپذیری خط آسمان را محاسبه کنیم – ویژگیهایی که نقش کلیدی در ادراک و ترجیحات انسان دارند. نتایج ما نشاندهنده تأثیر مثبت تسکین بر پیچیدگی است، و نشان میدهد که شرکتکنندگان زمینهای نورد را پیچیدهتر از زمینهای مسطح درک کردند. تنوع خط آسمان از هر سه مدل مشخصه بصری حذف شد، به دلیل همخطی بودن قوی با برجستگی. این متغیر مستحق کاوش بیشتر است زیرا پیچیدگی افق را نشان میدهد، مانند صافی آن و تعداد دفعاتی که افق شکسته میشود، که نشان میدهد بر پیچیدگی درک شده تأثیر میگذارد.
پیچیدگی نما، همانطور که توسط عناصر توزیع شده در یک تصویر پانوراما نشان داده می شود، ممکن است به راحتی قابل انتقال به توزیع فضایی این عناصر در سطح یک چشم انداز نباشد، حتی کمتر در داده های فضایی دوبعدی [ 8 ]. اطلاعاتی مانند شکل و رنگ ساختمانها، حضور اتومبیلها و افراد، و حتی بعد فراکتالی شاخههای درخت میتوانند بر پیچیدگی درک شده تصاویر تأثیر بگذارند – اما در دادههای مکانی ثبت نمیشوند. برای تکمیل این مطالعه، آزمایش بیشتر اعتبار مدلهای نما با استفاده از پیچیدگی تحلیل مبتنی بر تصویر، مانند معیارهای آنتروپی مبتنی بر توجه (به عنوان مثال، مرجع [ 61 ])، شمارش اشیا (مثلاً مراجع [ 62 ] آموزنده خواهد بود.، 63 )، الگوریتم های فشرده سازی تصویر [ 64 ]، تحلیل متریک منظر [ 60 ] و بعد فراکتال [ 60 ، 65 ، 66 ]. همچنین باید توجه داشته باشیم که یک مورد نظرسنجی برای پیچیدگی ممکن است به طور قابل اعتمادی درک پیچیدگی را درک نکرده باشد. پیچیدگی یک مفهوم پیچیده و چند وجهی است و شرکت کنندگان مختلف ممکن است آن را به طور متفاوتی تفسیر کرده باشند [ 67 ]]. توصیه برای تجزیه و تحلیل آینده شامل استفاده از نظرسنجی چند موردی، یا اگر قابل اجرا نیست، اطلاع رسانی به شرکت کنندگان با یک تعریف متمایز از پیچیدگی برای به دست آوردن درک پایه همگن تر از مفهوم است.
4.2. ملاحظات روش شناختی برای مدل سازی دیدگاه ها
ما از ترسیم درخت و مدلسازی تنه برای استفاده از دادههای ساختاری پوشش گیاهی (ارتفاع و موقعیت ساقه) مشتقشده از لیدار به عنوان موانع در تحلیل دید استفاده کردیم. درمان جزئی پوشش گیاهی، طبق دانش ما، قبلاً در مدلهای منظره گنجانیده نشده است. با این حال، این تکنیک در فصل برگی که در آن تاج پوشش تأثیر کمی بر روی دید دارد، مؤثرتر است، در حالی که در فصل برگی ممکن است منجر به برآورد بیش از حد دید شود. شایان ذکر است که در ارزیابی دید از میان درختان ارتفاع کف تاج را در نظر نگرفتیم. برای بهبود مدلسازی پوشش گیاهی، بهویژه برای مناطقی با درختان پراکنده و کف تاج مرتفع (به عنوان مثال، جنگلهای قرمز چوب)، ارتفاع کف تاج باید در ارزیابی دید و مدلسازی تنه لحاظ شود. علاوه بر این، ما یک سیستم انسداد دوتایی را در نظر گرفتیم که در آن درختان یا به طور کامل دید را مسدود می کنند یا اصلاً نمی بینند، در حالی که در واقعیت ممکن است تاج درخت بسته به نوع شاخ و برگ و تراکم کاملاً مات نباشد. روش دیگر، روش های ظریف تر، مانند استفاده از مدل های حجمی (مبتنی بر وکسل) دید سه بعدی [ 68 ] یا محاسبه تضعیف بینایی بر اساس تراکم شاخ و برگ و تغییرات فصلی، ممکن است ترجیح داده شود [ 27 ]. با این حال، این تکنیکها ممکن است چالشهایی را به دلیل زمان محاسبات محدود و ادغام محدود با تجزیه و تحلیل GIS ایجاد کنند [ 8 ]]. نکته دیگری که قابل ذکر است این است که با توجه به اینکه اکثر درختان برگریز منطقه مورد مطالعه ما اندازه های مشابهی دارند، قطر تنه را برای همه درختان قطع شده مشابه فرض کردیم. با این حال، در مناطقی با گونهشناسی درختان متنوعتر، این امر بهطور بالقوه میتواند باعث ایجاد خطا در تخمین دید زیر سایهبان شود، بهویژه زمانی که دیدگاه نزدیک به تنه باشد. تخمین دقیق تر تنه را می توان با استفاده از متریک قطر درخت در ارتفاع سینه (DBH) محاسبه شده از ارتفاع (به دست آمده از نقطه لیدار) و ضرایب رشد گونه بدست آورد [ 28 ].
سهم اضافی این کار شامل یک روش جدید برای ارزیابی مدل از طریق فناوری IVE است. استفاده از تصاویر IVE به ما امکان میدهد کل FOV را ضبط و نمایش دهیم، در نتیجه نگرانیهای مربوط به ناهماهنگی عکسهای پرسپکتیو با پوشش دید [ 8 ]، و مطابقت با تجربه «درجا» [ 69 ] را برطرف میکنیم.]. با این حال، IVE های مبتنی بر عکس ثابت هستند و ناوبری شرکت کنندگان را محدود می کنند (حرکت در محیط ها) و ممکن است شامل محتوایی باشد که در داده های مکانی ثبت نشده است (مانند افراد و اتومبیل ها). روش دیگر، شبیهسازیهای سهبعدی و محیطهای بازی که نماهای منظرهای را از دادههای مکانی ایجاد میکنند، میتوانند برای دستیابی به کنترل بالاتر بر محتوای صحنه و اجرای تعاملات پیشرفته (مثلاً اجازه عبور از طریق کنترل توسط کاربر) استفاده شوند. با این حال، می توان استدلال کرد که پانورامای فوتورئالیستی به عنوان روشی مقرون به صرفه و آسان و در عین حال بسیار واقع گرایانه برای ثبت مناظر، با مشکل اعتبار زیست محیطی پایین و تلاش تولید بیشتر شبیه سازی های سه بعدی مواجه است.
ما باید بر لزوم در نظر گرفتن طبقهبندی پوششهای زمینی دقیقتر و مرتبطتر تاکید کنیم. طبقه بندی های موجود بیش از حد گسترده هستند و فقط بین چند نوع جنگل (جنگل های برگریز، همیشه سبز و مختلط)، پوشش زمین، و گونه شناسی ساختمان (ساختمان های مسکونی و اداری عمومی) تمایز قائل می شوند. در واقع، مناظر تنها به ویژگیهای مادی آنها خلاصه نمیشوند. مردم مؤلفههای منظر را به صورت معنایی تفسیر میکنند و بر اساس کاربرد و اهمیت فرهنگی، معنوی و تاریخی به آنها معانی میدهند [ 18 ، 70 ]]. به عنوان مثال می توان به وجود ساختمان های جذاب، تاریخی یا شاخص، درختان شکوفه، پوشش گیاهی زینتی و عجیب و غریب و ویژگی هایی مانند پوشش گیاهی حفظ شده و نگهداری نشده اشاره کرد. این شاخصها به ترجیحات زیباییشناختی یا ویژگیهای بصری مهم، مانند تصویرپذیری و سرپرستی [ 40 ] مرتبط هستند. بنابراین، یک راه ممکن برای بهبود قدرت توضیحی مدلهای منظره میتواند استفاده از یک طبقهبندی دانهبندیتر همسو با شاخصهای ایجاد شده در روانشناسی محیطی و ادبیات شخصیت منظر بصری باشد.
باید توجه داشته باشیم که کاوش بدون محدودیت در منظرههای 360 درجه توسط HMD ممکن است به قیمت کاهش کنترل بر مقدار اطلاعات بصری که شرکتکنندگان از یک صحنه دریافت میکنند، تمام شود. میزانی که شرکت کنندگان صحنه غوطه ور را کاوش می کنند، و بنابراین، اطلاعاتی که دریافت می کنند، ممکن است بر اساس سطح تعامل، راحتی و آشنایی آنها با تجهیزات VR، و ترجیح به عناصر و ویژگی های خاص متفاوت باشد. همچنین، برخلاف پرسپکتیو منحصربهفرد تصاویر ثابت، تماشای افقی و عمودی بدون محدودیت، تعداد بیشماری از پرسپکتیو و انسداد را ایجاد میکند که چالشهای استانداردسازی اضافی را ایجاد میکند. اگرچه ما سعی کردیم این سوگیریها را با دستور دادن به شرکتکنندگان برای بررسی کامل هر صحنه IVE کنترل کنیم و پاسخ خود را بر اساس تجربه مکان به عنوان یک «کل، ما نمیتوانیم استنتاج قوی از سهم نسبی عنصر صحنه در ادراکات و اینکه آیا شرکتکنندگان اطلاعات یکسانی را از هر صحنه دریافت کردهاند یا خیر. از این نظر، بررسی اینکه آیا الگوهای مشاهده نقشی در درک پاسخ دهندگان از صحنه های غوطه ور دارند و نقش خاص چشم اندازهای خاص یا عناصر منظره خاصی را در ادراکات بررسی می کنند، جالب خواهد بود. این را می توان با استفاده از توانایی HMD های مدرن که جهت گیری سر و حرکت چشم کاربر را در زمان واقعی ضبط می کند، به دست آورد، و امکان برقراری ارتباط بین رفتار مشاهده، ویژگی های منظره و ادراک را فراهم می کند. بررسی اینکه آیا الگوهای مشاهده نقشی در ادراک پاسخ دهندگان از صحنه های غوطه ور دارند و نقش خاص چشم اندازهای خاص یا عناصر منظره خاصی را در ادراک بررسی می کنند، جالب است. این را می توان با استفاده از توانایی HMD های مدرن که جهت گیری سر و حرکت چشم کاربر را در زمان واقعی ضبط می کند، به دست آورد، و امکان برقراری ارتباط بین رفتار مشاهده، ویژگی های منظره و ادراک را فراهم می کند. بررسی اینکه آیا الگوهای مشاهده نقشی در ادراک پاسخ دهندگان از صحنه های غوطه ور دارند و نقش خاص چشم اندازهای خاص یا عناصر منظره خاصی را در ادراک بررسی می کنند، جالب است. این را می توان با استفاده از توانایی HMD های مدرن که جهت گیری سر و حرکت چشم کاربر را در زمان واقعی ضبط می کند، به دست آورد، و امکان برقراری ارتباط بین رفتار مشاهده، ویژگی های منظره و ادراک را فراهم می کند.
در نهایت، قدرت توضیحدهنده مدلهای ما ممکن است تحت تأثیر تفاوتهای فردی و اجتماعی-فرهنگی بین شرکتکنندگان، مانند آشنایی با چشمانداز و مکان رشد آنها [ 71 ، 72 ]، سطح تخصص [ 18 ]، و ارزشهایی که آنها دارند، قرار گرفته باشد. نسبت دادن به منظره [ 73 ]. با این وجود، از آنجایی که گزارش شده است که تغییرات چشمانداز تأثیر بسیار بیشتری نسبت به تغییرات بین تفاوتهای ناظر دارند [ 17 ]، ما انتظار نداریم که آنها تأثیر عمدهای بر نتایج ما داشته باشند. در مواردی که تفاوتهای فردی و فرهنگی مورد توجه است، آزمایشهای پیشآزمون مانند رتبهبندی ارتباط طبیعت [ 74 ]، آشنایی [ 72 ] و اطلاعات جمعیت شناختی را می توان در مدل ما برای کنترل تفاوت های پایه یا به عنوان راهی برای مدل سازی ادراک گروه های مختلف (به عنوان مثال، کارشناسان در مقابل غیر متخصصان، محلی در مقابل غیر محلی) گنجاند. همانطور که صحراوی و همکاران نشان داده اند. [ 18 ].
5. نتیجه گیری ها
این مطالعه نشان داد که مدلسازی منظره مبتنی بر دادههای فضایی با وضوح بالا و مدلسازی پوشش گیاهی بهبود یافته میتواند به طور موثر ترکیب و پیکربندی چشمانداز مرئی را کمیسازی کند و ویژگیها و کیفیتهای درک شده محیطهای پارک شهری را پیشبینی کند. ما همچنین نشان دادیم که IVE های فوتورئالیستی می توانند به عنوان روشی مناسب برای نمایش و جمع آوری ادراکات انسانی از مناظر مورد استفاده قرار گیرند، و بنابراین، شکاف بین تحلیل عینی و ذهنی مناظر شهری را پر کنیم. چندین راه برای بهبود بیشتر قدرت پیشبینی مدلهای منظر پیشنهاد شدهاند، از جمله اصلاح معیارهای فضایی، استفاده از پوشش زمین دانهدارتر، کمی کردن الگوی مشاهده شرکتکنندگان از صحنههای غوطهور، و فاکتورگیری تفاوتهای فردی در مدل. در حالی که نتایج ما برای زمینه ای از منطقه پارک شهری خاص است، گردش کار را می توان در سایر زمینه های شهری و منظر با یک مرحله کالیبراسیون از طریق انجام بررسی IVE تکرار کرد. روش پیشنهادی ما می تواند برای چندین برنامه مفید باشد. اول، طراحان و برنامه ریزان منظر می توانند از مدل منظره به عنوان راهی برای ایجاد نقشه های صریح فضایی از کیفیت های زیبایی شناختی و ترمیمی یک سایت استفاده کنند، یک مسیر منظره را با ویژگی های خاص در ذهن طراحی کنند (به عنوان مثال، باز، مناظر به دریاچه)، ویژگی های منظر را مقایسه کنند. قبل و بعد از مداخله طراحی یا تغییر منظر. دوم، تحقیق در خدمات اکوسیستم فرهنگی میتواند از گردش کار اتوماسیون ما برای مدلسازی منظرهها برای میلیونها مکان مورد تحسین، احترام یا بازدید مکرر که از مجموعه دادههای رسانههای اجتماعی، مانند تصاویر خراشیدهشده از Flickr و Panoramio، یا نظرات خراششده از Tripadvisor، جمعآوری شدهاند، استفاده کند. سوم، مطالعات متمرکز بر ارزیابی تأثیر بصری زیرساختها (به عنوان مثال، توربینهای بادی و بزرگراهها) به طور مشابه از مدلسازی بهبود یافته پوشش گیاهی و ویژگیهای ساخته شده سود خواهند برد. در نهایت، تحقیقات ادراک منظر می تواند از رویکرد ما برای بررسی روابط ظریف بین عناصر منظر و پیکربندی آنها و نتایج روانشناختی خاص، مانند بازگرداندن توجه یا کاهش استرس بهره مند شود. همانطور که درک ما از روابط بین محیطهای شهری و رفاه روانی و فیزیولوژیکی انسان بهبود مییابد، مدلهای با وضوح بالا از مناظر شهری ابزار ارزشمندی برای تسهیل مشارکت جامعه و تصمیمگیری در برنامهریزی و طراحی شهری ارائه میکنند. توربینهای بادی و بزرگراهها) به طور مشابه از مدلسازی بهبود یافته پوشش گیاهی و ویژگیهای ساخته شده بهرهمند خواهند شد. در نهایت، تحقیقات ادراک منظر می تواند از رویکرد ما برای بررسی روابط ظریف بین عناصر منظر و پیکربندی آنها و نتایج روانشناختی خاص، مانند بازگرداندن توجه یا کاهش استرس بهره مند شود. همانطور که درک ما از روابط بین محیطهای شهری و رفاه روانی و فیزیولوژیکی انسان بهبود مییابد، مدلهای با وضوح بالا از مناظر شهری ابزار ارزشمندی برای تسهیل مشارکت جامعه و تصمیمگیری در برنامهریزی و طراحی شهری ارائه میکنند. توربینهای بادی و بزرگراهها) به طور مشابه از مدلسازی بهبود یافته پوشش گیاهی و ویژگیهای ساخته شده بهرهمند خواهند شد. در نهایت، تحقیقات ادراک منظر می تواند از رویکرد ما برای بررسی روابط ظریف بین عناصر منظر و پیکربندی آنها و نتایج روانشناختی خاص، مانند بازگرداندن توجه یا کاهش استرس بهره مند شود. همانطور که درک ما از روابط بین محیطهای شهری و رفاه روانی و فیزیولوژیکی انسان بهبود مییابد، مدلهای با وضوح بالا از مناظر شهری ابزار ارزشمندی برای تسهیل مشارکت جامعه و تصمیمگیری در برنامهریزی و طراحی شهری ارائه میکنند. مانند بازگرداندن توجه یا کاهش استرس. همانطور که درک ما از روابط بین محیطهای شهری و رفاه روانی و فیزیولوژیکی انسان بهبود مییابد، مدلهای با وضوح بالا از مناظر شهری ابزار ارزشمندی برای تسهیل مشارکت جامعه و تصمیمگیری در برنامهریزی و طراحی شهری ارائه میکنند. مانند بازگرداندن توجه یا کاهش استرس. همانطور که درک ما از روابط بین محیطهای شهری و رفاه روانی و فیزیولوژیکی انسان بهبود مییابد، مدلهای با وضوح بالا از مناظر شهری ابزار ارزشمندی برای تسهیل مشارکت جامعه و تصمیمگیری در برنامهریزی و طراحی شهری ارائه میکنند.
مواد تکمیلی
موارد زیر به صورت آنلاین در https://www.mdpi.com/2220-9964/9/7/445/s1 ، اسکریپت Python S1 در دسترس هستند: viewscape_study.py. همچنین می توان به اسکریپت پایتون از آدرس زیر دسترسی داشت: github.com/ptabriz/viewscape_analysis
مشارکت های نویسنده
مفهوم سازی، پیام تبریزیان، پرور ک. باران و هلنا میتاسووا; تحلیل صوری، پیام تبریزیان; کسب سرمایه، راس ک. Meentemeyer; تحقیق، پیام تبریزیان; روش شناسی، پیام تبریزیان، آنا پتراسووا و هلنا میتاسووا. منابع، راس ک. Meentemeyer; نرم افزار، پیام تبریزیان و آنا پتراسووا; سرپرست، Perver K. Baran، Helena Mitasova و Ross K. Meentemeyer; تجسم، پیام تبریزیان; نگارش – پیش نویس اصلی، پیام تبریزیان و پرور ک. باران ; نگارش-بررسی و ویرایش، آنا پتراسووا، پیام تبریزیان، پرور کی باران، جلنا وکومانوویچ، هلنا میتاسووا و راس کی مینتمایر. همه نویسندگان نسخه منتشر شده نسخه خطی را خوانده و با آن موافقت کرده اند.
منابع مالی
این تحقیق توسط بنیاد ملی علوم (NSF) تحت جایزه SCC-RCN: مشارکت مدنی هوشمند در مناطق شهری سریع (CNS-1737563) تأمین مالی شد.
تضاد علاقه
نویسندگان هیچ تضاد منافع را اعلام نمی کنند.
منابع
- قصیده، Å. میلر، دی. تجزیه و تحلیل رابطه بین شاخص های پیچیدگی چشم انداز و ترجیح. محیط زیست طرح. B طرح. دس 2011 ، 38 ، 24-38. [ Google Scholar ] [ CrossRef ]
- تیویت، م. قصیده، Å. فرای، جی. مفاهیم کلیدی در چارچوبی برای تحلیل شخصیت منظره بصری. Landsc. Res. 2006 ، 31 ، 229-255. [ Google Scholar ] [ CrossRef ]
- بارتون، جی. هاین، آر. Pretty, J. مزایای سلامتی پیاده روی در فضای سبز با ارزش طبیعی و میراثی بالا. جی. اینتگر. محیط زیست علمی 2009 ، 6 ، 261-278. [ Google Scholar ] [ CrossRef ]
- هیپ، جی. گولوادی، GB; آلوز، اس. Sequeira, S. رابطه بین سبزی ادراک شده و ترمیم پذیری درک شده در پردیس های دانشگاهی و کیفیت زندگی گزارش شده توسط دانشجویان. محیط زیست رفتار 2015 ، 48 ، 1292-1308. [ Google Scholar ] [ CrossRef ]
- جانسون، ام. فورس، اچ. لیندگرن، تی. Wiström، B. ایمنی شخصی درک شده در رابطه با پوشش گیاهی جنگلی شهری – بررسی. شهری برای. سبز شهری. 2013 ، 12 ، 127-133. [ Google Scholar ] [ CrossRef ]
- Roe, JJ; آسپینال، PA; ماوروس، پ. Coyne, R. درگیر کردن مغز: تأثیر صحنه های طبیعی در مقابل شهری با استفاده از روش های جدید EEG در یک محیط آزمایشی. محیط زیست علمی 2013 ، 1 ، 93-104. [ Google Scholar ] [ CrossRef ]
- پالمر، جی اف. اعتبار رتبهبندی هافمن، RE و اعتبار نمایش در ارزیابیهای چشمانداز منظره. Landsc. طرح شهری. 2001 ، 54 ، 149-161. [ Google Scholar ] [ CrossRef ]
- قصیده، Å. هاگرهال، سی ام. سانگ، ن. تحلیل پیچیدگی چشم انداز بصری: نظریه و کاربرد. Landsc. Res. 2010 ، 35 ، 111-131. [ Google Scholar ] [ CrossRef ]
- سانگ، ن. میلر، دی. قصیده، Å. معیارهای منظر و توپولوژی بصری در تجزیه و تحلیل اولویت منظر. محیط زیست طرح. B طرح. دس 2008 ، 35 ، 504-520. [ Google Scholar ] [ CrossRef ]
- برابین، ال. Mark, DM با استفاده از viewshed ها، GIS، و طبقه بندی منظره برای برچسب گذاری عکس های منظره. Appl. Geogr. 2011 ، 31 ، 1115-1122. [ Google Scholar ] [ CrossRef ]
- ویلسون، جی. لیندزی، جی. لیو، جی. مشخصات مسیرهای عابر پیاده شهری، ایندیاناپولیس، ایندیانا، ایالات متحده آمریکا. J. Maps 2008 , 4 , 108-118. [ Google Scholar ] [ CrossRef ]
- Zanon، JD با استفاده از تجزیه و تحلیل Viewshed برای شناسایی کلاسهای پوشش زمین قابل مشاهده و ویژگیهای برجسته در پارک ملی Big Bend. پاپ منبع. مقعدی 2015 ، 17 ، 1-11. [ Google Scholar ]
- Sang, N. Wild Vistas: پیشرفت در رویکردهای محاسباتی به تجزیه و تحلیل “Viewshed”. در نقشه برداری وحشی ; Carver, SJ, Fritz, S., Eds. Springer Science + Business Media: دوردرخت، هلند، 2016; صص 69-87. [ Google Scholar ]
- Schirpke، U. تاسر، ای. Tappeiner, U. پیش بینی زیبایی منظره مناطق کوهستانی. Landsc. طرح شهری. 2013 ، 111 ، 1-12. [ Google Scholar ] [ CrossRef ]
- بل، جی. ویلسون، جی. لیو، جی. سبزی محله و تغییرات 2 ساله در شاخص توده بدنی کودکان و نوجوانان. صبح. J. قبلی پزشکی 2008 ، 35 ، 547-553. [ Google Scholar ] [ CrossRef ] [ PubMed ]
- وکومانوویچ، جی. سینگ، KK; پتراسووا، آ. Vogler، JB جنگل را برای درختان ندیدن: مدلسازی مناظر برون شهری با LiDAR. Landsc. طرح شهری. 2018 ، 170 ، 169-176. [ Google Scholar ] [ CrossRef ]
- Schirpke، U. تیمرمن، اف. تاپینر، یو. Tasser, E. خدمات اکوسیستم فرهنگی مناطق کوهستانی: مدل سازی ارزش زیبایی شناختی. Ecol. اندیک. 2016 ، 69 ، 78-90. [ Google Scholar ] [ CrossRef ]
- صحراویی، ی. کلوزل، سی. فولتته، جی.-سی. مدلسازی فضایی پتانسیل زیباییشناختی منظر در حاشیههای شهری – روستایی. جی. محیط زیست. مدیریت 2016 ، 181 ، 623-636. [ Google Scholar ] [ CrossRef ]
- وکومانوویچ، جی. Orr، زیباییشناسی منظر BJ و محرکهای منظره مهاجرت در غرب جدید: طبیعی بودن، مقیاس بصری، و پیچیدگی. Land 2014 , 3 , 390-413. [ Google Scholar ] [ CrossRef ]
- یو، اس. یو، بی. آهنگ، دبلیو. وو، بی. ژو، جی. هوانگ، ی. وو، جی. ژائو، اف. Mao, W. سبزی مبتنی بر نما: ارزیابی سه بعدی از دید سبز ساختمان های شهر با استفاده از نمایه نمای سبز طبقه. Landsc. طرح شهری. 2016 ، 152 ، 13-26. [ Google Scholar ] [ CrossRef ]
- اولریش، RS پاسخ انسان به پوشش گیاهی و مناظر. Landsc. طرح شهری. 1986 ، 13 ، 29-44. [ Google Scholar ] [ CrossRef ]
- نصار، جی ال. جولیان، دی. بوچمن، اس. هامفریس، دی. مروهالی، م. کیفیت عاطفی صحنه ها و نقاط مشاهده: نگاهی به چشم انداز و پناهگاه. Landsc. طرح. 1983 ، 10 ، 355-361. [ Google Scholar ] [ CrossRef ]
- وکومانوویچ، جی. ووگلر، جی. پتراسووا، ا. محاسبه کنید. محیط زیست سیستم شهری 2019 ، 78 ، 101388. [ Google Scholar ] [ CrossRef ]
- بری، اس. الیت، جی. خطا و عدم قطعیت در مدلهای زیستگاه. J. Appl. Ecol. 2006 ، 43 ، 413-423. [ Google Scholar ] [ CrossRef ]
- مودری، وی. Šímová، P. تأثیر دقت موقعیت، اندازه نمونه و مقیاس در مدلسازی توزیع گونهها: یک بررسی. بین المللی جی. جئوگر. Inf. علمی 2012 ، 26 ، 2083-2095. [ Google Scholar ] [ CrossRef ]
- کلوچک، تی. لاگنر، او. Šímová، P. چگونه دقت داده ها بر قابلیت اطمینان مدل های نمای دیجیتال تأثیر می گذارد؟ مطالعه موردی با توربین های بادی Appl. Geogr. 2015 ، 64 ، 46-54. [ Google Scholar ] [ CrossRef ]
- بارتی، پی. ریتسما، اف. کینگهام، اس. میلز، اس. ترکیب پوشش گیاهی در مدلسازی مواجهه بصری در محیطهای شهری. بین المللی جی. جئوگر. Inf. علمی 2011 ، 25 ، 851-868. [ Google Scholar ] [ CrossRef ]
- مورگویتیو، جی جی. شرستا، ر. گلن، NF; Spaete، LP محاسبات دید بهبود یافته با مدلسازی انسداد تنه درخت از LiDAR هوایی. بین المللی جی. جئوگر. Inf. علمی 2017 ، 27 ، 1865-1883. [ Google Scholar ] [ CrossRef ]
- Llobera، M. مدلسازی دید از طریق پوشش گیاهی. بین المللی جی. جئوگر. Inf. علمی 2007 ، 21 ، 799-810. [ Google Scholar ] [ CrossRef ]
- کرونکویست، ا. جوکینن، جی. روسی، ر. ارزیابی اصالت محیط های مجازی: مقایسه سه دستگاه. Adv. هوم محاسبه کنید. تعامل داشتن. 2016 ، 2016 ، 2937632. [ Google Scholar ] [ CrossRef ]
- اسلاتر، ام. لوتو، بی. آرنولد، ام.ام. Sanchez-Vives، MV چگونه محیط های مجازی فراگیر را تجربه می کنیم: مفهوم حضور و اندازه گیری آن. آنو. Psicol. 2009 ، 40 ، 193-210. [ Google Scholar ]
- کیم، ک. روزنتال، MZ; زیلینسکی، دی. Brady، R. مقایسه دسکتاپ، نمایشگر روی سر و سیستمهای کاملاً غوطهور شش دیواری با استفاده از یک کار استرسزا. در مجموعه مقالات کارگاه های واقعیت مجازی IEEE 2012 (VRW)، کوستا مسا، کالیفرنیا، ایالات متحده آمریکا، 4 تا 8 مارس 2012. صص 143-144. [ Google Scholar ]
- چولتکین، ا. لوکا، I.-E. Zahner, M. در مورد قابلیت استفاده و سودمندی تجسم های سه بعدی (ژئو) – تمرکز بر محیط های واقعیت مجازی. در مجموعه مقالات کنگره XXIII ISPRS، کمیسیون دوم، پراگ، جمهوری چک، 12 تا 19 ژوئیه 2016. [ Google Scholar ]
- تبریزیان، پ. هارمون، آ. پتراسووا، بی. پتراس، وی. Mitasova، R. Helena Meentemeyer، غوطه ور شدن ملموس برای طراحی زیست محیطی. در مجموعه مقالات سی و هفتمین کنفرانس سالانه انجمن طراحی به کمک رایانه در معماری (ACADIA)، کمبریج، MA، ایالات متحده آمریکا، 2 تا 4 نوامبر 2017؛ صص 600–609. [ Google Scholar ]
- لی، دی جی؛ دیاس، ای. Scholten, HJ (Eds.) Geodesign با ادغام طراحی و علوم زمین فضایی . Springer: نیویورک، نیویورک، ایالات متحده آمریکا، 2015; جلد 1. [ Google Scholar ]
- تبریزیان، پ. باران، پی کی; اسمیت، WR; Meentemeyer، RK کاوش پتانسیل بازسازی درک شده محوطه سبز شهری از طریق محیط های مجازی فراگیر. جی. محیط زیست. روانی 2018 ، 55 ، 99-109. [ Google Scholar ] [ CrossRef ]
- کاروس، جی. لافورتزا، آر. کولانجلو، جی. دنتامارو، آی. اسکوپلیتی، م. سانسی، جی. رابطه بین طبیعی بودن و ترمیم پذیری ادراک شده فضاهای سبز مختلف شهری. روانشناسی 2013 ، 4 ، 227-244. [ Google Scholar ] [ CrossRef ]
- هارتیگ، تی. ایوانز، GW; Jamner، LD; دیویس، دی.اس. Gärling, T. ردیابی مرمت در محیط های طبیعی و شهری. جی. محیط زیست. روانی 2003 ، 23 ، 109-123. [ Google Scholar ] [ CrossRef ]
- Kuper, R. ارزیابی ترجیح منظر، پیچیدگی و انسجام برای مدلهای منظر دیجیتال طراحی شده. Landsc. طرح شهری. 2017 ، 157 ، 407-421. [ Google Scholar ] [ CrossRef ]
- قصیده، Å. فرای، جی. Tveit، MS; پیام رسان، پ. میلر، دی. شاخص های طبیعی بودن درک شده به عنوان محرک های ترجیح منظر. جی. محیط زیست. مدیریت 2009 ، 90 ، 375-383. [ Google Scholar ] [ CrossRef ]
- هرتزوگ، TR; Kropscott، LS Legibility، Mystery و Visual Access به عنوان پیش بینی کننده اولویت و خطر درک شده در تنظیمات جنگل بدون مسیر. محیط زیست رفتار 2004 ، 36 ، 659-677. [ Google Scholar ] [ CrossRef ]
- میتاشووا، اچ. Hofierka، J. درون یابی توسط اسپلاین منظم با کشش: II. کاربرد در مدلسازی زمین و تحلیل هندسه سطح. ریاضی. جئول 1993 ، 25 ، 657-669. [ Google Scholar ] [ CrossRef ]
- فیری، دی. Morgenroth، J. تحولات در روش های طبقه بندی پوشش زمین Landsat: یک بررسی. Remote Sens. 2017 , 9 , 967. [ Google Scholar ] [ CrossRef ]
- جاسیویچ، جی. استپینسکی، ژئومورفون های TF – یک رویکرد تشخیص الگو برای طبقه بندی و نقشه برداری لندفرم ها. ژئومورفولوژی 2013 ، 182 ، 147-156. [ Google Scholar ] [ CrossRef ]
- آنتونلو، آ. فرانچسکی، اس. فلورانسیگ، وی. کمیتی، اف. Tonon، G. کاربرد یک الگوریتم تشخیص الگو برای تشخیص تک درخت از داده های LiDAR. بین المللی قوس. فتوگرام حسگر از راه دور اسپات. Inf. علمی 2017 ، XLII ، 18–22. [ Google Scholar ] [ CrossRef ]
- هاورکورت، اچ. توما، ال. Zhuang، Y. محاسبات دید در زمین در حافظه خارجی. J. Exp. الگوریتمیکس 2009 ، 13 ، 1-5. [ Google Scholar ] [ CrossRef ]
- اوئما، ای. آنتروپ، ام. مرجا، ر. روزار، ج. مندر، Ü. معیارها و شاخص های منظر: مروری بر استفاده از آنها در تحقیقات منظر چاپ / شرایط استفاده. زندگی کشیش Landsc. Res. 2009 ، 3 ، 1-28. [ Google Scholar ] [ CrossRef ]
- درامستاد، ما؛ اولسون، جی دی. فورمن، RTT اصول بومشناسی منظر در معماری منظر و برنامهریزی کاربری زمین ؛ مطبوعات جزیره: واشنگتن، دی سی، ایالات متحده آمریکا، 1996. [ Google Scholar ]
- Dimitrijevic، A. مقایسه پیش بینی های نقشه مکعب کروی مورد استفاده در رندر زمین به اندازه سیاره. دانشگاه فکتا سر ریاضی. به اطلاع رساندن. 2016 ، 31 ، 259-297. [ Google Scholar ]
- درامستاد، ما؛ Tveit، MS; Fjellstad، WJ; Fry، GLA روابط بین ترجیحات چشم انداز بصری و شاخص های مبتنی بر نقشه ساختار منظر. Landsc. طرح شهری. 2006 ، 78 ، 465-474. [ Google Scholar ] [ CrossRef ]
- مارسل، ام آر. ایروین، KN; لورنزو-آریباس، آ. واربر، SL آیا ترمیم پذیری درک شده تأثیرات تنوع زیستی درک شده و طبیعی بودن درک شده بر بهزیستی عاطفی پس از پیاده روی گروهی در طبیعت را واسطه می کند؟ جی. محیط زیست. روانی 2016 ، 46 ، 217-232. [ Google Scholar ] [ CrossRef ]
- Kuper, R. مقادیر آنتروپی اطلاعات ترجیحی، پیچیدگی و رنگ برای تصاویر بصری رشد گیاه و رویشی. HortTechnology. 2015 ، 25 ، 625-634. [ Google Scholar ] [ CrossRef ]
- لیندال، پی جی؛ هارتیگ، تی. تنوع معماری، ارتفاع ساختمان، و کیفیت ترمیمی مناظر مسکونی شهری. جی. محیط زیست. روانی 2013 ، 33 ، 26-36. [ Google Scholar ] [ CrossRef ]
- بوردنز، اس. Abbot, B. طراحی و روش تحقیق: یک فرآیند. رویکرد ، ویرایش دهم. تحصیلات مک گراو هیل: نیویورک، نیویورک، ایالات متحده آمریکا، 2018. [ Google Scholar ]
- مو، JF; مشکی، WC; بابین، بی جی; اندرسون، تجزیه و تحلیل داده های چند متغیره RE ، ویرایش هفتم. Pearson: Upper Saddle River، نیوجرسی، ایالات متحده آمریکا، 2009. [ Google Scholar ]
- تمبرها، اثرات نفوذپذیری AE بر محفظه و فضای درک شده. محیط زیست رفتار 2010 ، 42 ، 864-886. [ Google Scholar ] [ CrossRef ]
- فرای، جی. Tveit، MS; قصیده، Å. Velarde، MD بوم شناسی مناظر بصری: بررسی زمینه مشترک مفهومی شاخص های چشم انداز بصری و اکولوژیکی. Ecol. اندیک. 2009 ، 9 ، 933-947. [ Google Scholar ] [ CrossRef ]
- بل، اس. الگوی منظر، ادراک و تجسم در مدیریت بصری جنگل ها. Landsc. طرح شهری. 2001 ، 54 ، 201-211. [ Google Scholar ] [ CrossRef ]
- کاپلان، آر. کاپلان، اس . تجربه طبیعت. دیدگاه روانشناختی انتشارات دانشگاه کمبریج: کمبریج، بریتانیا، 1989. [ Google Scholar ]
- تمبر، AE پیشرفت در تنوع بصری و آنتروپی. محیط زیست طرح. B طرح. دس 2003 ، 30 ، 449-463. [ Google Scholar ] [ CrossRef ]
- روزنهولتز، آر. لی، ی. ناکانو، ال. اندازه گیری بهم ریختگی بصری. J. Vis. 2007 ، 7 ، 17. [ Google Scholar ] [ CrossRef ] [ PubMed ]
- Fairbairn، D. اندازه گیری پیچیدگی نقشه. کارتوگر. J. 2006 , 43 , 224-238. [ Google Scholar ] [ CrossRef ]
- استیگمار، اچ. هری، ال. ارزیابی معیارهای تحلیلی خوانایی نقشه. کارتوگر. J. 2011 ، 48 ، 41-53. [ Google Scholar ] [ CrossRef ]
- پالمبو، ال. مکین، ADJ; برتامینی، ام. بررسی پیچیدگی بصری و تأثیر آن بر مدت زمان درک شده. J. Vis. 2014 ، 14 ، 3. [ Google Scholar ] [ CrossRef ]
- هاگرهال، سی ام. لایک، تی. تیلور، آر.پی. کولر، ام. کولر، آر. مارتین، TP بررسی پاسخ EEG انسان به مشاهده الگوهای فراکتال. ادراک 2008 ، 37 ، 1488-1494. [ Google Scholar ] [ CrossRef ] [ PubMed ]
- تیلور، آر.پی. اسپهار، بی. حکیم، ج.ا. کلیفورد، سی دبلیو; نیول، BR; هاگرهال، سی ام. پورسل، تی. مارتین، TP پاسخ های ادراکی و فیزیولوژیکی به پیچیدگی بصری الگوهای فراکتال. غیر خطی Dyn. روانی زندگی علمی. 2005 ، 9 ، 89-114. [ Google Scholar ]
- شنور، اس. بکتاش، ک. Çöltekin، A. پیچیدگی بصری اندازه گیری و درک شده: یک مطالعه مقایسه ای بین سه ارائه دهنده نقشه آنلاین. کارتوگر. Geogr. Inf. علمی 2018 ، 45 ، 238-254. [ Google Scholar ] [ CrossRef ]
- چمیلوسکی، اس. Tompalski، P. برآورد نمایان بودن رسانه تبلیغات در فضای باز با رویکرد مبتنی بر وکسل. Appl. Geogr. 2017 ، 87 ، 1-13. [ Google Scholar ] [ CrossRef ]
- اپلتون، ک. لاوت، الف. تجسم مناظر روستایی مبتنی بر GIS: تعریف واقعگرایی «کافی» برای تصمیمگیری محیطی. Landsc. طرح شهری. 2003 ، 65 ، 117-131. [ Google Scholar ] [ CrossRef ]
- پالمر، جی اف با استفاده از معیارهای فضایی برای پیشبینی ادراک منظره در یک چشمانداز در حال تغییر: دنیس، ماساچوست. Landsc. طرح شهری. 2004 ، 69 ، 201-218. [ Google Scholar ] [ CrossRef ]
- کولادو، اس. استاتس، اچ. Sorrel، MA یک مدل رابطه ای از ترمیم پذیری درک شده: اثرات درهم تنیده تعهدات، آشنایی، امنیت و نظارت والدین. جی. محیط زیست. روانی 2016 ، 48 ، 24-32. [ Google Scholar ] [ CrossRef ]
- کین، تی. نقش آشنایی در زیبایی شناسی منظره دشت. در مجموعه مقالات دوازدهمین کنفرانس دشت آمریکای شمالی، سدار فالز، IA، ایالات متحده آمریکا، 5 تا 9 اوت 1990. ص 205-208. [ Google Scholar ]
- تانگ، آی.-سی. سالیوان، WC; چانگ، سی.-ای. ارزیابی ادراکی مناظر طبیعی: نقش ارتباط فردی با طبیعت. محیط زیست رفتار 2015 ، 47 ، 595-617. [ Google Scholar ] [ CrossRef ]
- مایر، FS; فرانتز، سی ام مقیاس ارتباط با طبیعت: اندازه گیری احساس افراد در اجتماع با طبیعت. جی. محیط زیست. روانی 2004 ، 24 ، 503-515. [ Google Scholar ] [ CrossRef ]
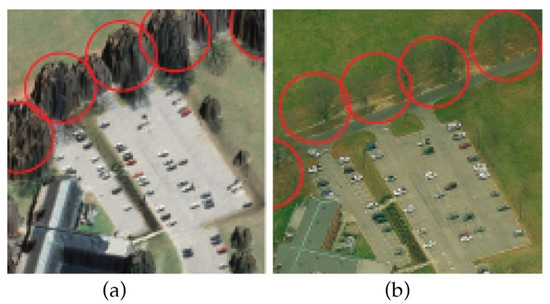
شکل 1. نمایش درختان برگریز در مدلهای سطح دیجیتال مشتق شده از لیدار (DSM) ( a ) و تصاویر نمای پرنده ( b ) در فصل برگریزی.

شکل 2. منطقه مطالعه: پارک Dorothea Dix.
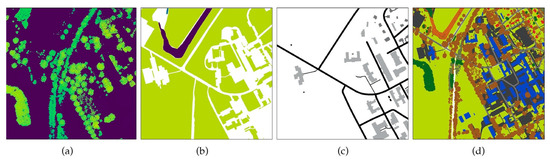
شکل 3. لایههای همجوشی پوشش زمین شامل ( الف ) سایبانهای درختی مشتقشده از نقاط لیدار، ( ب ) پوشش زمین دیجیتالی شده بر روی تصاویر با وضوح بالا و ( ج ) جادهها و ساختمانهای شطرنجیشده از دادههای برداری رسمی که برای تولید نیمه ( d ) ترکیب شدهاند. پوشش زمین با وضوح متر. منابع داده: ( الف ) فاز 3 NC QL2 lidar (2015); ( ب ) NAIP، آژانس خدمات کشاورزی USDA، 2014; ( ج ) مجموعه داده های GIS شهر رالی. سرور داده باز رالی.
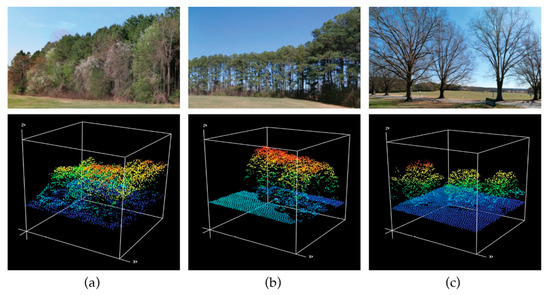
شکل 4. تصاویر مزرعه (بالا) و نقاط لیدار (پایین) که سه ساختار پوشش گیاهی را نشان میدهند: ( الف ) طبقات همیشه سبز مخلوط با طبقه میانی و زیرزمینی برگریز. ( ب ) لکه های متراکم همیشه سبز و زیر طبقه. ج ) گونه های برگریز پراکنده.
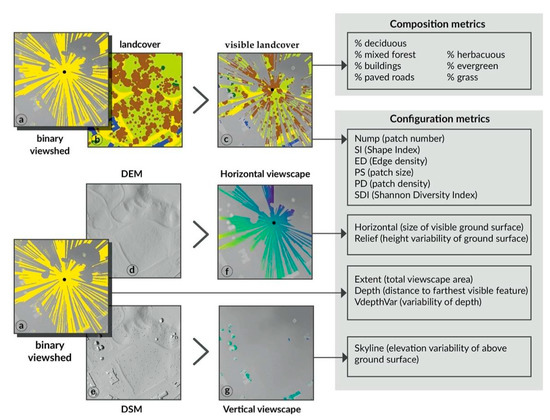
شکل 5. روش محاسبه نقشه نمای دوتایی ( a ) برای یک دیدگاه واحد، تقاطع نقشه حاصل با پوشش زمین ( b )، DEM ( d ) و DSM) برای به دست آوردن نقشه پوشش زمین قابل مشاهده ( c )، افقی ( f ) و عمودی ( ز ) نقشههای منظره، و بهکارگیری تحلیل فضایی برای تعیین کمیت معیارهای ترکیب و پیکربندی.
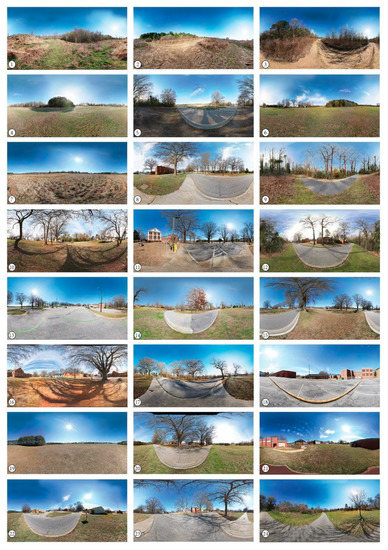
شکل 6. تصاویر مستطیل شکل استفاده شده در بررسی محیط مجازی فراگیر (IVE). توجه: تصاویر دارای اعوجاج کروی هستند.

شکل 7. روش ایجاد محیط های مجازی همهجانبه: ( الف ) گرفتن، ( ب ) دوخت، ( ج ) نگاشت مکعبی، و ( د ) بسته بندی تصویر.
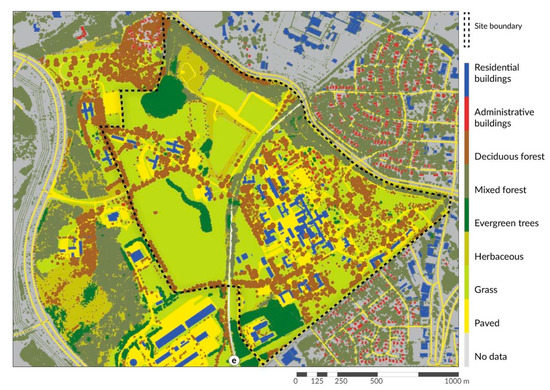
شکل 8. نقشه دقیق پوشش زمین برای منطقه مورد مطالعه تهیه شده است.
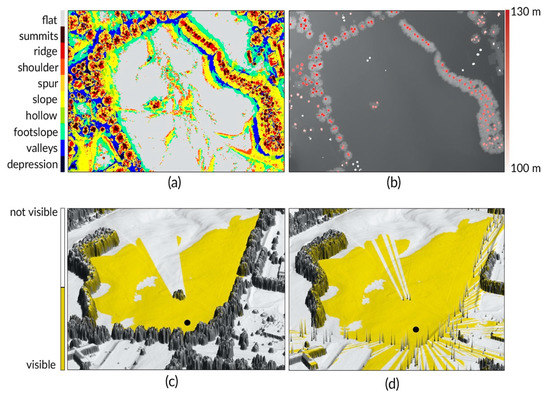
شکل 9. نتایج مدلسازی انسداد تنه: ( الف ) نتایج تشخیص لندفرم ژئومورفونی، که در آن قلهها به رنگ قهوهای نشان داده شدهاند. ( ب ) قله های استخراج شده با مقادیر ارتفاعی. نمای مدل شده قبل از ( ج ) و بعد از ( د ) مدلسازی تنه (نقطه سیاه نمایانگر دیدگاه است).


1 نظر