

چکیده
ادغام تصاویر نوری و داده های ارتفاعی برای برنامه های نقشه برداری سه بعدی از اهمیت بالایی برخوردار است. تصاویر ماهواره ای با وضوح بسیار بالا (VHR) داده های جغرافیایی ایده آلی را برای نقشه برداری اطلاعات ساختمان فراهم می کنند. از آنجایی که ساختمان ها ذاتاً اشیاء مرتفع هستند، برای نتایج قابل اعتماد تشخیص ساختمان، این تصاویر باید با داده های ارتفاعی خود ثبت شوند. با این حال، ثبت مشترک دقیق برای تصاویر VHR خارج از نادر که در مناطق متراکم شهری به دست میآیند بسیار دشوار است. بنابراین، این تحقیق یک روش ثبت نام مشترک ارتفاع مبتنی بر اختلاف (DECR) را برای تولید یک مدل سطح دیجیتال خط دید (LoS-DSM) پیشنهاد میکند تا به طور موثر به ثبت مشترک دادههای ارتفاع تصویر با دقت در سطح پیکسل دست یابد. نسبت به روش فتوگرامتری سنتی، مقدار RMSE ارتفاعات مشتق شده کمتر از 2 پیکسل است. کاربرد روش DECR از طریق تشخیص ساختمان مبتنی بر ارتفاع (EBD) در یک منطقه شهری متراکم چالش برانگیز نشان داده شده است. کیفیت نتیجه تشخیص بیش از 90٪ است. علاوه بر این، اشیاء شناسایی شده با موفقیت به مکان های زمینی صحیح خود ارجاع داده شدند تا امکان ادغام مستقیم با نقشه های دیگر فراهم شود. در مقایسه با الگوریتم اصلی توسعه LoS-DSM، الگوریتم DECR با کاهش مراحل محاسبه، حفظ دقت ثبت نام مشترک و به حداقل رساندن نیاز به نرمالسازی ارتفاع در مناطق شهری متراکم کارآمدتر است. اشیاء شناسایی شده با موفقیت به مکان های زمینی صحیح خود ارجاع داده شدند تا امکان ادغام مستقیم با نقشه های دیگر فراهم شود. در مقایسه با الگوریتم اصلی توسعه LoS-DSM، الگوریتم DECR با کاهش مراحل محاسبه، حفظ دقت ثبت نام مشترک و به حداقل رساندن نیاز به نرمالسازی ارتفاع در مناطق شهری متراکم کارآمدتر است. اشیاء شناسایی شده با موفقیت به مکان های زمینی صحیح خود ارجاع داده شدند تا امکان ادغام مستقیم با نقشه های دیگر فراهم شود. در مقایسه با الگوریتم اصلی توسعه LoS-DSM، الگوریتم DECR با کاهش مراحل محاسبه، حفظ دقت ثبت نام مشترک و به حداقل رساندن نیاز به نرمالسازی ارتفاع در مناطق شهری متراکم کارآمدتر است.
کلید واژه ها
تصاویر ماهواره ای VHR استریو ، تصاویر خارج از نادر ، نقشه های نابرابری ، داده های ارتفاعی ، ثبت نام مشترک ، تشخیص ساختمان ، DSM خط دید
1. مقدمه
از آنجایی که ساختمان ها کلاس اشیاء برجسته در مناطق شهری هستند، اطلاعات ساختمان برای برنامه ریزی شهری و برنامه های کاربردی مدیریت بسیار مهم است. داده های رایج برای استخراج این نوع اطلاعات، تصاویر ماهواره ای با وضوح بسیار بالا (VHR) است. از آنجایی که ساختمان ها ذاتاً اجسام مرتفع هستند، ادغام تصاویر نوری و داده های ارتفاعی برای کاربردهای تشخیص ساختمان از اهمیت بالایی برخوردار است. بر این اساس، ثبت نام مشترک تصویر-ارتفاع برای پشتیبانی از تشخیص ساختمان مبتنی بر ارتفاع در تصاویر ماهوارهای VHR به یک منطقه فعال تحقیقاتی در جامعه سنجش از دور تبدیل شده است.
تصاویر ماهواره ای نوری VHR از سال 1999 توسط چندین سیستم رصد زمین به دست آمده است. این تصاویر با پوشش وسیع، وضوح زیر متر زمین، هزینه نسبتاً کم و محتوای اطلاعاتی غنی که برای نقشه برداری از محیط های پیچیده شهری ضروری است مشخص می شوند. علاوه بر این، به دلیل چابکی سنسورهای ماهوارهای موجود، تصاویر VHR معمولاً با زوایای خارج از مسیر و/یا در امتداد مسیر به دست میآیند تا حالتهای دریافت سریع و متنوع از جمله حالت استریو را ارائه دهند.
تصاویر استریو از جمله انواع تصاویر پر تقاضا هستند. این به این دلیل است که آنها اجازه تولید اطلاعات مبتنی بر استریو (اطلاعات ارتفاعات و نابرابری) را می دهند که شناسایی ویژگی های بالا را تسهیل می کند. برای برنامه های نقشه برداری شهری، اطلاعات ارتفاع نقش اساسی در تشخیص ساختمان مبتنی بر ارتفاع در تصاویر VHR ایفا می کند. این به این دلیل است که اطلاعات در مورد ارتفاع ساختمان با امکان تشخیص دقیق و تشخیص قابل اعتماد سقف ساختمان از اشیاء مشابه طیفی و/یا فضایی در محیط های شهری مانند پارکینگ ها، نتایج تشخیص را بهبود می بخشد.
مدل های رقومی ارتفاع (DEM) معمولا برای ذخیره اطلاعات ارتفاع به اشکال مختلف استفاده می شوند. این فرمها شامل مدلهای دیجیتال زمین (DTMs) که ارتفاعات زمین را توصیف میکنند، مدلهای سطح دیجیتال (DSM) که ارتفاعات سطح قابل مشاهده (هم ارتفاعات زمین و هم ارتفاعات خارج از زمین) را توصیف میکنند، و مدل سطح دیجیتال نرمال شده (nDSM) که ارتفاعات بالای زمین را توصیف میکنند. با این حال، این فرمهای DEM تنها اطلاعات هندسی را نشان میدهند و فاقد محتوای اطلاعاتی غنی از تصاویر نوری VHR (به ویژه اطلاعات رادیومتری، بافت، طیفی و متنی) هستند. بنابراین، زمانی که دادههای DEM تولید میشوند، باید با دادههای نوری مربوطه خود یکپارچه شوند تا به مجموعه داده کاملتری برای کاربردهای استخراج اطلاعات به کمک سهبعدی دست یابند.
تولید دادههای ارتفاعی مبتنی بر فتوگرامتری از تصاویر VHR استریو با نرخ ارزانتری نسبت به سایر منابع سنجش از راه دور از جمله فناوری LiDAR (تشخیص نور و محدوده) قابل دستیابی است. داده های ارتفاعی مبتنی بر استریو تولید شده، اطلاعات ارتفاع بالای سطوح مانند ساختمان ها و درختان را نشان می دهد. از این رو، آنها منجر به DSM می شوند. در حال حاضر، حسگرهای ماهوارهای VHR میتوانند تصاویر استریو درون خطی (MIS) چند نمای را برای همان منطقه با استفاده از قابلیت اکتساب خارج از نادر تولید کنند. این تصاویر ماهوارهای MIS-VHR پوشش جامعی را ارائه میدهند، انسداد را در محیطهای پیچیده به حداقل میرسانند و امکان تولید DSMهای متراکم و دقیق را فراهم میکنند.
ادغام مجموعه داده های نوری و ارتفاعی منجر به اطلاعات سطح با کیفیت بالاتر می شود زیرا این دو نوع داده دارای ویژگی های مکمل هستند. بنابراین، ثبت مشترک این دو مجموعه داده یک رویکرد یکپارچه سازی معتبر برای ایجاد یک منبع داده است که نقاط ضعف هر دو را جبران کند. با این حال، هنگامی که چنین منابع چند داده ای یکپارچه می شوند، مشکلات متعددی ایجاد می شود، به عنوان مثال، ثبت اشتباه مشکل ساز DSM ها زمانی که آنها در تصاویر VHR غیر نادر ثبت می شوند. این مشکل به دلیل پرسپکتیو شدید و اثرات جابجایی امدادی ناشی از به دست آوردن تصاویر ماهواره ای VHR هنگام ثبت در مناطق متراکم شهری است [ 1 ] [ 2 ].
با در نظر گرفتن این مشکل ثبت مشترک داده های ارتفاعی نوری، مطالعه ما ادبیات مربوطه را بررسی کرد. راه حل خط دید DSM (LoS-DSM) که توسط Suliman و Zhang [ 3 ] معرفی شده است، ثبت مشترک ارتفاع نوری را حتی برای تصاویر ماهواره ای VHR خارج از نادر، کارآمدتر از سایر تکنیک های موجود فراهم می کند. در این تحقیق، هدف این است که با به حداقل رساندن مراحل محاسباتی، حفظ دقت ثبت مشترک در سطح پیکسل، و کاهش نیاز به نرمالسازی دادههای ارتفاعی در مناطق شهری متراکم، کارایی این راهحل را بیشتر بهبود بخشد.
تصاویر استریو اجازه تولید دو نوع اطلاعات سطحی مرتبط را می دهند: نقشه های نابرابری سطح (SDM) و مدل های ارتفاع سطح (DSM). در حالی که SDM ها اندازه گیری های نسبی را در فضاهای تصویری یک جفت استریو نشان می دهند، DSM ها ارتفاعات مطلق مشتق شده در فضای شی را نشان می دهند. نقشه های نابرابری از نظر محاسباتی مقرون به صرفه هستند و به طور کامل در تصویر مرجع مطابق با تعریف اختلاف ثبت می شوند. از این رو، استفاده از چنین نقشه هایی باید هم کاهش مراحل محاسباتی و هم حفظ دقت ثبت مشترک در سطح پیکسل را برآورده کند. علاوه بر این، اگر صفحه یکسوسازی اپیقطبی (نرمالسازی) در فضای جسم افقی بود، میتوان یک رابطه مستقیم بین ارتفاعات زمین و نابرابریهای متناظر آنها در فضای جسم ایجاد کرد. هنگامی که این نرمال سازی در ارتفاع متوسط زمین منطقه تصویربرداری شده باشد، جابجایی تسکین زمین در تصاویر پیش بینی شده باید حداقل باشد و بنابراین داده های ارتفاعی مشتق شده مربوطه با دقت در سطح پیکسل به داده های تصویر ثبت می شود. حداقل اثرات امدادی زمین بنابراین، دادههای ارتفاعی بهدستآمده باید نشاندهنده یک LoS-DSM مشترک باشد که آماده استفاده برای تشخیص ساختمانهای مبتنی بر ارتفاع در مناطق شهری متراکم با تغییرات تسکین زمین معقول است.
روش پیشنهادی، بر اساس مطالعه اخیر ما در [ 4 ]، منجر به روش ثبت نام مشترک ارتفاعی مبتنی بر اختلاف (DECR) برای تولید موثر LoS-DSM می شود که به طور دقیق در یک تصویر مرجع انتخاب شده ثبت می شود. کارهای مقدماتی مقاله حاضر به طور خلاصه در [ 5 ] و [ 6 ] ارائه شده است. هدف نهایی تحقیق حاضر نشان دادن کاربرد راه حل بهبود یافته مبتنی بر DECR از طریق تشخیص ساختمان مبتنی بر ارتفاع در تصاویر ماهواره ای VHR خارج از نادر است که در مناطق شهری چالش برانگیز به دست آمده است. این هدف همچنین شامل ارجاع جغرافیایی پشت بام های نقشه برداری شده در یک تصویر خارج از نادر برای ادغام مستقیم سایر نقشه های موجود در سیستم های اطلاعات جغرافیایی (GIS) است.
بقیه این مقاله به شرح زیر سازماندهی شده است: بخش 2 کارهای قبلی مربوط به ادغام داده های ارتفاع تصویر را مرور می کند و مشکل تحقیق را شناسایی می کند. بخش 3 روش پیشنهادی DECR را شرح می دهد. بخش 4 روش اعتبارسنجی روش DECR را شرح می دهد. بخش 5 کاربرد راه حل بهبود یافته LoS-DSM را با استفاده از روش DECR در تشخیص ساختمان مبتنی بر ارتفاع نشان می دهد. و بخش 6 داده های مورد استفاده را شرح می دهد و نتایج تجربی به دست آمده را مورد بحث قرار می دهد. در نهایت، نتیجه گیری در بخش 7 آورده شده است.
2. آثار قبلی
همانطور که در ادبیات مربوطه دیده می شود، روش های ثبت تصویر به تصویر به طور گسترده ای برای رسیدگی به مشکل ثبت نام همزمان داده های نوری ارتفاع استفاده می شود. هدف این روشها، با در نظر گرفتن دادههای ارتفاع بهعنوان نقشههای 2.5 بعدی، تعیین مطابقت نقطه به نقطه بین دو تصویر از یک صحنه با اجرای چهار مرحله اساسی است: استخراج ویژگی، تطبیق ویژگی، تخمین مدل تبدیل، و نمونهگیری مجدد [ 7 ]. . از آنجایی که دادههای تصویر و ارتفاع دارای ویژگیها و ظاهر متفاوتی هستند، چالش اصلی این روشها شناسایی اشیاء مشترک در تصاویر ثبتشده مشترک است [ 8 ]. بر این اساس، روشهای ثبت نام مشترک، همانطور که به طور گسترده توسط [ 9]، به طور کلی به عنوان روش های مبتنی بر ویژگی یا مبتنی بر شدت دسته بندی می شوند. در حالی که روش های مبتنی بر ویژگی ثبت بین دو مجموعه داده را از طریق تطبیق ویژگی های مشترک ایجاد می کنند، روش های مبتنی بر شدت از مقادیر شدت در مجموعه داده ها برای یافتن شباهت استفاده می کنند. فرآیند نمونهگیری مجدد در اکثر روشهای ثبت به منظور جلوگیری از ایجاد هرگونه اعوجاج رادیومتری که ممکن است بر فرآیندهای بعدی تأثیر بگذارد، بهجای دادههای تصویر، روی دادههای ارتفاعی اعمال میشود.
از یک طرف، ویژگیهای رایج مورد استفاده در روشهای مبتنی بر ویژگی شامل ویژگیهای نقطه، خط یا مسطح/منطقه [ 10 ] است. ویژگیهای نقطهای استخراجشده توسط یک آشکارساز نقطه گوشه توسط [ 11 ] برای ثبت یک تصویر نوری به دادههای LiDAR مربوطه آن استفاده شد. ویژگی های خط توسط [ 12 ] برای ثبت مشترک داده های تصویر و ارتفاع استفاده شد. برای استخراج سقف ساختمان با استفاده از داده های LiDAR و تصاویر چند طیفی، [ 13] صفحات سقف را از داده های نوری و LiDAR استخراج کرد و سپس مرکز آنها را به هم مرتبط کرد. از سوی دیگر، روشهای ثبت بر اساس شدت، وابستگی آماری بین مجموعه دادههای تصویر و ارتفاع را به منظور استخراج معیارهای شباهت ارزیابی میکنند. این روش ها از پردازش پیچیده استخراج و تطبیق ویژگی جلوگیری می کنند و از این رو نتایج بهتری را ارائه می دهند. اطلاعات متقابل، به عنوان موفق ترین مثال، برای ثبت داده های نوری و ارتفاعی که در [ 14 ] نشان داده شده است، مؤثر است.
همه روش های ثبت تصویر به تصویر شامل محاسبات گران قیمت در طی چهار مرحله اساسی ذکر شده در قبل می باشد. علاوه بر این، در مناطق شهری متراکم، اکثر این روشهای ثبت با مشکلات عمدهای مواجه میشوند که تصاویر ماهوارهای VHR خارج از نادر به دلیل کج شدن شدید ساختمان ناشی از دریافت پرسپکتیو خارج از نادر این تصاویر به کار میروند. بر خلاف مدلهای ارتفاعی که دارای برجستگی املایی هستند، ساختمانی که در تصاویر پرسپکتیو متمایل میشود، نماهای ساختمانی را ایجاد میکند که نشان دهنده اشیایی است که در مدلهای ارتفاعی املایی گنجانده نشدهاند. از این رو، مگر اینکه اطلاعات هندسی اکتساب تصویر در فرآیند ثبت مشترک گنجانده شود، این تفاوت طرح ریزی در دو مجموعه داده یک مشکل ثابت ایجاد می کند.
راستسازی واقعی میتواند با ایجاد تصاویر ارتو تصحیح شده برای جابهجاییهای برجسته و جلوههای پرسپکتیو، ثبت مشترک ارتفاع نوری را فراهم کند. بسیاری از مطالعات از ثبت مشترک مستقیم بین تصاویر ارتو و داده های ارتفاع متناظر آنها برای استخراج اطلاعات سود برده اند (به عنوان مثال، [ 15 ] و [ 16 ]). روشهای تصحیح، بر خلاف اکثر روشهای ثبت تصویر به تصویر، مراحل یافتن ویژگیهای مشترک و تخمین پارامترهای مدل تبدیل، مورد نیاز در روشهای ثبت مرسوم، را با استفاده از اطلاعات اکتساب تصویر دور میزنند. یک مطالعه جامع در مورد فرآیند راستسازی واقعی شهری توسط [ 17 ] ارائه شده است] . در این فرآیند، دادههای ارتفاع مورد استفاده قرار میگیرند و اطلاعات مدل حسگر تصاویر پرسپکتیو بکار گرفته شده برای حذف تأثیرات اکتساب تصویر پرسپکتیو خارج از سطح زمین و از این رو تصویر را کاملاً با دادههای ارتفاعی تراز میکنند [ 18 ].
با این حال، راستسازی واقعی به مدلهای ساختمان دیجیتالی نیاز دارد که برای اکثر مکانها در دسترس نیستند. علاوه بر این، برای پر کردن شکافهای انسداد به الگوریتمهای پیچیدهای برای تشخیص و جبران انسداد نیاز دارد. علاوه بر این، تکنیکهای تقویت رادیومتریک برای اصلاح و متعادل کردن مقادیر روشنایی نمونهبرداری مجدد و تولید موزاییکهای یکپارچه از تصاویر ارتو واقعی مورد نیاز است. از این رو، تصويرهاي ارتوي واقعي گران، زمان بر و به سختي به دست مي آيند.
نتیجهگیری شده است که همه روشهای بررسی شده – از نظر هزینه اجرا و کیفیت نتیجه – زمانی که از تصاویر خارج از نادر بر روی محیطهای شهری متراکم استفاده میشود، ناکارآمد هستند. در مقابل، یک راهحل DSM خط دید (LoS-DSM) اخیراً توسط [ 3 ] برای رسیدگی به مشکل ثبت مشارکت کارآمد ارتفاع تصویر بر اساس ترکیب اطلاعات مدل سنسور تصاویر مورد استفاده معرفی شده است. بنابراین، در این مطالعه، ما راهحل LoS-DSM را برای شناسایی جنبههای بهبود بررسی میکنیم، زیرا این یک تکنیک ساده، امیدوارکننده و جدید برای مشکل مطرح شده در تحقیق ما است.
راه حل LoS-DSM برای دستیابی به ثبت مشترک دقیق و حفظ اطلاعات تصویر اصلی ایجاد شده است. برای کاهش محدودیت های سایر روش های موجود در حال حاضر پیشنهاد شده است. الگوریتم راه حل ساده، کارآمد و موثر است حتی زمانی که از تصاویر خارج از نادر در محیط های شهری متراکم استفاده می شود. اثربخشی راه حل از طریق تشخیص ساختمان مبتنی بر ارتفاع در تصاویر VHR شهری خارج از نادر نشان داده شده است. با این وجود، ما استدلال می کنیم که کارایی الگوریتم را می توان از نظر دو جنبه بهبود بخشید: به حداقل رساندن مراحل محاسباتی مورد نیاز، و کاهش نیاز به نرمال سازی ارتفاع.
با توجه به مراحل محاسباتی، این الگوریتم اطلاعات مدل حسگر تصاویر VHR را در دو مرحله اصلی ترکیب میکند: مثلثسازی دادههای ارتفاع به صورت فتوگرامتری (تقاطع فضا) و سپس بازتاب دادن این ارتفاعات به فضای تصویر (ثبت مشترک) برای دستیابی به دقت دقیق. ثبت و حفظ داده های تصویر اصلی از این رو، الگوریتم دارای مراحل محاسبه اضافی است که در صورت دور زدن آنها کارآمد خواهد بود و در همان زمان، دقت ثبت اشتراک در سطح پیکسل حفظ می شود. این مراحل اضافی شامل تقاطع فضا، تنظیم بسته نرم افزاری، و محاسبه مختصات سه بعدی و همچنین بازپرداخت مجدد ارتفاعات DSM مثلثی است.
علاوه بر این، از آنجایی که داده های ارتفاعی به فضای تصویر اصلی منتقل می شوند، اعوجاج های تسکین زمین در تصاویر خارج از نادر حذف یا به حداقل نمی رسد. از این رو، یک فرآیند عادی سازی برای ارتفاعات DSM ثبت شده مشترک، برای تولید nDSM، نمی تواند برای مناطق شهری متراکم حتی با تغییرات زمین متوسط نادیده گرفته شود، که معمولاً بر اساس استانداردهای طراحی هندسی جاده در مناطق شهری است. این فرآیند به دو مرحله بعدی نیاز دارد: استخراج DTM از داده های DSM و سپس کم کردن DTM حاصل از DSM مربوطه آن ( nSDM = DSM – DTMnSDM=DSM−DTM). مراحل استخراج و تفریق معمولاً خطاهای ارتفاعی را معرفی می کنند که بر نتایج برنامه های نقشه برداری مبتنی بر سه بعدی تأثیر منفی می گذارد. در مورد استفاده از تصاویر VHR خارج از نادر به دست آمده در مناطق شهری متراکم، این خطاها به دلیل وجود برجسته لنگه ساختمان بسیار جدی می شوند [ 19 ].
اگرچه راهحل LoS-DSM حتی برای تصاویر غیر نادر نیز موفق است، الگوریتم اصلی هنوز جای پیشرفت بیشتری دارد. مناطق بهبود شناسایی شده در مراحل تولید ارتفاع، ثبت نام مشترک و عادی سازی قرار دارند. از این رو، جنبههای مسئله تحقیق شامل (1) تولید کارآمد دادههای ارتفاعی از تصاویر ماهوارهای MIS-VHR، (2) ثبت مستقیم دادههای ارتفاعی نوری از دقت سطح پیکسل با یکی از تصاویر استفادهشده، و (3) ) تغییرات تسکین زمین در ارتفاعات ثبت شده را به حداقل رساند تا نیاز به نرمال سازی ارتفاع کاهش یابد.
رویکردهای فتوگرامتری، همانطور که در الگوریتم اصلی LoS-DSM اجرا شده است، شامل مراحل محاسباتی پرهزینه ای مانند تقاطع فضا و تنظیم بسته است، زیرا SDM های فضای تصویر و DSM های فضای شی معمولاً با مقیاس مرتبط نیستند. بنابراین، اگر یک رابطه مقیاس بین SDM و DSM به دست آید، یک تولید کارآمد و ثبت مشترک دقیق LoS-DSM انجام خواهد شد زیرا SDM ها، طبق تعریف، دقیقاً در تصویر مرجع انتخاب شده مشترک ثبت می شوند. علاوه بر این، اگر SDM ها از تصاویر استریو اپی قطبی که بر اساس ویژگی های سطح زمین ثبت شده اند اندازه گیری شوند همانطور که در [ 19 نشان داده شده است.]، SDM های نقشه برداری شده حداقل اثرات زمین را خواهند داشت. در نتیجه، ارتفاعات DSM مشتقشده از این SDMها باید حداقل اثرات زمین را داشته باشند که میتوان آنها را نادیده گرفت تا مراحل معمولی سازی DSM در تشخیص ساختمانهای مبتنی بر ارتفاع در مناطق شهری متراکم را نادیده گرفت.
بنابراین، ما در این تحقیق با استخراج دادههای ارتفاعی (DSM) از نقشههای نابرابری غنیشده نابرابریهای زمین به حداقل رسیده در فضای شی مربوطه بر اساس یک رابطه مقیاس، بهبودی را برای سه جنبه شناساییشده پیشنهاد میکنیم. این امکان تولید مستقیم داده های ارتفاعی و ثبت مشترک دقیق را حتی با تصاویر VHR خارج از نادر فراهم می کند. روش پیشنهادی در بخش زیر توضیح داده شده است.
3. روش ثبت نام مشترک ارتفاع بر اساس نابرابری (DECR).
هدف روش DECR تولید موثر LoS-DSM است که در داده های تصویر اپی قطبی مربوطه با دقت در سطح پیکسل ثبت شده است. مفهوم دستیابی به یک نقشه نابرابری متراکم در فضای جسم است که رابطه مقیاس با ارتفاعات مربوطه دارد. از آنجایی که نقشههای نابرابری تولید شده دقیقاً مطابق با تصاویر مرجع خود مطابق با تعریف مطابقت دارند، تبدیل مقادیر نابرابری مشترک به ارتفاعات مربوطه آنها منجر به ثبت دادههای ارتفاعی کاملاً مشترک با همان تصاویر مرجع میشود. از این رو، مقادیر ارتفاع بر اساس تناسب با مقادیر نابرابری متناظر آنها تولید و ثبت می شوند.
روش DECR از دو صفحه نمایش در فضای جسم برای ارتباط نابرابریهای متناظر از جفتهای استریو اپی قطبی مختلف استفاده میکند و سپس مقیاسهای انتقال را برای تولید دادههای نابرابری اضافی (دادههای تکمیلی) استخراج میکند که سپس برای غنیسازی و بهبود نقشه نابرابری مرجع انتخاب شده ترکیب میشوند. . این همبستگی با استفاده از تکنیک صفحات پرتاب دوگانه (DPP) ایجاد می شود که در مطالعه اخیر ما معرفی شد [ 4 ]. پس از آن، رابطه مشترک به دست آمده بر اساس تکنیک DPP را می توان بیشتر گسترش داد، همانطور که در مقاله فعلی، برای استخراج مقادیر ارتفاع از تفاوت های متناظر آنها. روش DECR، همانطور که در شکل 1 نشان داده شده است، شامل پنج مرحله از جمله مراحل DPP است: نمایش تصویر ماهواره ای MIS-VHR بر روی دو صفحه در فضای جسم، ساخت تصاویر اپی قطبی در فضای جسم، محاسبه مقیاس های انتقال و تبدیل اختلاف، تولید SDM غنی شده با ترکیب داده های نابرابری. از دامنه های مختلف استریو منتقل شده و مدل ارتفاعی ثبت شده مشترک (یعنی LoS-DSM مبتنی بر اختلاف) را استخراج می کند. جزئیات بیشتر در مورد هر مرحله، از جمله مراحل DPP گنجانده شده، در بخش های فرعی زیر ارائه شده است.
شایان ذکر است که اطلاعات مدل سنسور برای تصاویر استفاده شده برای توسعه روش DECR ضروری است. برای تصاویر ماهواره ای VHR، مدل تابع منطقی (RFM) مدل سنسور معمولی است. دارای دو مجموعه مختلف از ضرایب چند جمله ای گویا (RPCs) برای دو شکل تبدیل مخالف که رابطه بین فضاهای جسم و تصویر را برقرار می کند. آنها فرم های تبدیل رو به جلو (زمین به تصویر) و عقب / معکوس (تصویر به زمین) هستند [ 20 ]] . اگرچه دو مجموعه RPC متفاوت هستند و به هم مرتبط نیستند، اکثر فروشندگان تصاویر ماهواره ای یک مجموعه از RPCها را در اختیار کاربران نهایی قرار می دهند، یعنی مدل RFM پیشرو. اگر RPCهای مدل معکوس در دسترس نباشند، ابتدا باید آنها را محاسبه کرد. خوانندگانی که نیاز به محاسبه RPCهای عقب افتاده دارند تشویق می شوند تا به توضیحات و محاسبات دقیق مستند شده در [ 21 ] و [ 22 ] مراجعه کنند.

شکل 1 . نمودار جریان روش ثبت نام مشترک ارتفاع مبتنی بر اختلاف (DECR) برای تولید LoS-DSM مبتنی بر اختلاف از تصاویر ماهوارهای MVIS-VHR. شکل همچنین ادغام بین روش های DPP و DECR را نشان می دهد.
3.1. پخش تصاویر ماهواره ای استریو درون خطی
برای ایجاد یک رابطه مشترک بین نابرابری ها و داده های مربوط به ارتفاع شی-فضای آنها، تصاویر ورودی باید دوباره طرح ریزی شوند تا به صورت مجازی در صفحه فضای شی مربوطه قرار گیرند. علاوه بر این، برای استخراج تحلیلی مقیاسهای انتقال (نابرابری به نابرابری) و مقیاسهای تبدیل (نابرابری به ارتفاع)، اطلاعات افست حاصل از گسترش این پیشبینی به یک صفحه افقی متفاوت ضروری است. از این رو، اطلاعات مدل سنسور RFM دو طرفه تصاویر ورودی بسیار مهم است. در حالی که مدل RFM رو به جلو ابتدا برای نمایش تصاویر به فضای شی استفاده می شود، مدل RFM عقب برای محاسبه اطلاعات افست مورد نیاز برای استخراج فرمول های تبدیل استفاده می شود. شکل 2 فرآیند طرح مجدد دو صفحه ای پیشنهادی را نشان می دهد که از [4 ]، در دو فاز اصلی.
مرحله اول را می توان در پنج مرحله اجرا کرد: (1) یافتن پوشش زمینی تقریبی تصاویر ماهواره ای MIS-VHR، (2) ساختن یک شبکه فضایی شی 2 بعدی با اندازه پیکسل زمین تصاویر برای تولید مجموعه ای از برنامه ریز. مختصات X و Y، (3) مشخص کردن یک صفحه نرمال سازی (در ارتفاع ثابت Z) موازی با مبدأ ارتفاع، (4) محاسبه مکان های تصویر مربوط به مختصات زمین با استفاده از فرم رو به جلو RFM، و (5) نمونهبرداری مجدد مقادیر روشنایی تصاویر MIS-VHR به شبکه فضای شی دوبعدی که قبلاً ساخته شده بود. ارتفاع ثابت صفحه نمایش به صورت افقی در ارتفاع متوسط زمین منطقه تصویربرداری شده انتخاب شده است – که در این مقاله با Z avg نشان داده شده است.– به منظور به حداقل رساندن اعوجاج های تسکین زمین و به طور تقریبی صاف کردن خطوط اپی قطبی تصاویر VHR پیش بینی شده به دست آمده توسط سنسورهای آرایه خطی.
مرحله دوم طرح ریزی، استخراج تحلیلی فرمول های مقیاس انتقال و تبدیل است. برای این منظور، لازم است که تصاویر مجدداً بر روی یک ارتفاع ثابت فضای شی متفاوت – که به عنوان (Z 0 ) نامیده میشود – پرتاب شوند. برخلاف مراحل پیشبینی قبلی، فرآیند نمونهگیری مجدد در این طرح مجدد مورد نیاز نیست. با این حال، این مرحله نمایش دوم فقط برای تعیین جابجایی مکان پیکسل زمین ضروری است ( Δ X، Δ Y)(ΔX,ΔY)در هر دو جهت X و Y همانطور که در شکل 2 توضیح داده شده است. این شکل نشاندهنده فرآیند پرتاب دوگانه است: اولین موردی که از مدل رو به جلو استفاده میکند، از شبکه زمینی دوبعدی ساختهشده به فضای تصویر به منظور نمونهبرداری مجدد از روشنایی تصویر، و دومی با استفاده از مدل عقبنشینی، از محل محاسبهشده تصویر به یک موقعیت زمین خطی در ارتفاعات مختلف (Z 0 ) برای یافتن اطلاعات افست. انحرافات را می توان به راحتی همانطور که در رابطه (1) زیر بیان شده است محاسبه کرد:
(Δ XΔ Y) = (ایکس2–ایکس1Y2–Y1)(ΔXΔY)=(X2−X1Y2−Y1)(1)
جایی که Δ XΔXو Δ YΔYانحرافات پیکسل زمین محاسبه شده در X و Y هستند
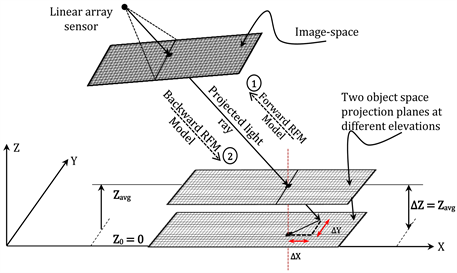
شکل 2 . فرآیند بازپرداخت پیشنهادی در دو صفحه افقی فضای شی با ارتفاعات مختلف. یک پیکسل تصویر در دو ارتفاع مختلف (Z avg و Z 0 ) نمایش داده می شود تا دو نقطه سه بعدی خطی را برای محاسبه جابجایی اشیاء-فضا ایجاد کند.
جهت ها به ترتیب (ایکس1،Y1)(X1,Y1)و (ایکس2،Y2)(X2,Y2)مکان پیکسل زمین محاسبه شده به ترتیب در ارتفاعات Z avg و Z 0 هستند. دو نقطه سه بعدی در سطوح افقی مختلف و هم خط هستند.
3.2. ساخت تصاویر اپی قطبی
از آنجایی که تصاویر استریوی ماهوارهای VHR در سطح متوسط زمین مجدداً در فضای شیء پخش میشوند، دو مزیت باید حاصل شود. اول، تنوع زمین-تسکین به حداقل می رسد. این کمینه سازی باعث می شود که نقاط تصویر مربوطه مجدداً بر روی صفحه فضای جسم-فضا پخش شوند تا حداقل فواصل افقی را بین یکدیگر داشته باشند. پیامد آن این است که مقادیر نابرابری ویژگیهای سطح زمین باید نزدیک به صفر باشد اگر منطقه تصویر شده دارای تغییرات برجسته متوسط باشد. دوم، خطوط اپی قطبی به طور تقریبی مستقیم هستند. این ویژگی منجر به این می شود که نقاط متناظر در همان صفحه فضای شی باید روی یک خط مستقیم موازی با جهت اپی قطبی قرار گیرند. بنابراین، برای حفظ این دو مزیت،
بنابراین برای ایجاد تصاویر اپی قطبی و حفظ خصوصیات ذکر شده، محورهای مختصات پلانیمتری فضای جسم (یعنی محورهای X و Y) باید با زاویه جهت اپی قطبی چرخانده شوند تا با ردیف تصاویر موازی شوند. جهت. این مدل از ساخت و نمونه برداری مجدد تصاویر اپی قطبی در فضای جسم در [ 23 ] توضیح داده شده است.
زاویه جهت اپی قطبی نیز لازم است که روی افست ها اعمال شود Δ XΔXو Δ YΔYدر مرحله اول (با استفاده از معادله (1)) برای تمام پیکسل های زمین هر تصویر محاسبه می شود. این را می توان با استفاده از رابطه (2) به منظور یافتن افست مربوطه در جهت اپی قطبی (یعنی، Δایکس“ΔX′). علاوه بر این، محاسبه محدوده افست های عمود بر ( ΔY“ΔY′) اجازه اعتبار سنجی بیشتر را می دهد. به عنوان مثال، اگر محدوده افست عمود بر ( ΔY“ΔY′) در داخل یک پیکسل است، این اعتبار جهت اپی قطبی محاسبه شده (q) و در نتیجه انحرافات محاسبه شده را تایید می کند ( Δایکس“ΔX′).
(Δایکس“ΔY“) = (cos θ− sin θگناه θcos θ) ⋅ (Δ XΔ Y)(ΔX′ΔY′)=(cosθsinθ−sinθcosθ)⋅(ΔXΔY)(2)
3.3. محاسبه مقیاس های تبدیل
با ایجاد تصاویر اپی قطبی همانطور که در مراحل قبل توضیح داده شد، جهت گیری نسبی و مکان تصاویر ارائه شده باید حفظ شود. این اجازه می دهد تا یک رابطه بین تناسبی بین نابرابری های مرتبط ایجاد کنید و ارتفاع مربوطه را بالای صفحه طرح انتخابی بدست آورید. این رابطه بر اساس اطلاعات افست محاسبه شده از فرآیند طرح ریزی دو صفحه ای با استفاده از رابطه (1) تعیین می شود.
قبل از توصیف رابطه نابرابری بین تناسبی، ابتدا باید مقدار نابرابری روشن شود. نقشههای نابرابری نشاندهنده ارتباط یک تصویر استریو اپی قطبی (تصویر دامنه/ مرجع) با یک استریو مات دیگر (تصویر ورودی) است. بنابراین، مقدار اختلاف ( Dال آرDLR) به سادگی است ایکس“X′مقدار مختصات یک پیکسل در تصویر اپی قطبی سمت چپ ( ایکسL“XL′) منهای ایکس“X′مقدار مختصات همان پیکسل در تصویر اپی قطب سمت راست ( ایکسآر“XR′). به دنبال این تعریف، نقشه نابرابری حاصل دقیقاً با تصویر اپی قطبی مرجع با ثبت مشارکت در سطح پیکسل مطابقت دارد.
برای تعیین رابطه ساخته شده، یک طرح توصیفی توسعه داده شده است. شکل 3 رابطه پرتوهای نوری را نشان می دهد که بر روی دو صفحه افقی فضای شی در مورد سه تصویر ماهواره ای MIS-VHR پخش می شوند. این پرتوهای نور همه در صفحه اپی قطبی – XZ در امتداد یک خط اپی قطبی (یعنی همان ردیف از تصاویر ارائه شده) نشان داده می شوند. نقطه تلاقی این پرتوهای نور نقطه واقعی تصویر در فضای جسم است. رویکردهای مثلثی فتوگرامتری این نقطه (یعنی تقاطع فضا) را برای بازسازی فضای جسم تصویر شده حل می کند. تقاطع پرتوها با سطح سطح متوسط افقی (Z avg) مکان های زمینی پیکسل های پیش بینی شده هستند. از این رو، فاصله بین این پیکسل های پیش بینی شده، نابرابری فضای شی (D) است.
از طرح نشان داده شده در شکل 3 ، دو فرمول مبتنی بر مقیاس را می توان بر اساس قوانین تشابه مثلث اصلی استخراج کرد: فرمول اختلاف دامنه به دامنه (DDF) و فرمول اختلاف به ارتفاع (DEF). در حالی که DDF مشتق شده است
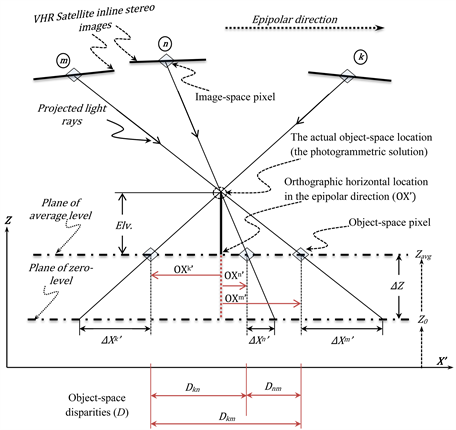
شکل 3 . طرحی در صفحه اپیقطبی که روابط بین نابرابریهای زمین و ارتفاع متناظر آنها را در بالای صفحه نمایش انتخابشده توصیف میکند.
در اصل در [ 4 ]، DEF مطالعه حاضر را برای روش DECR توسعه داده است. این دو فرمول مشتق شده به ترتیب در معادله (3) و معادله (4) بیان شده اند. این دو فرمول بر اساس مقیاس بندی نابرابری های اندازه گیری شده در فضای شی هستند.
Dمتر _ n= (Δایکسمتر“– Δایکسn“Δایکسک“– Δایکسn“) ⋅Dک . n= (Δایکسمتر“– Δایکسn“Δایکسک“– Δایکسمتر“) ⋅Dک . مترDm.n=(ΔXm′−ΔXn′ΔXk′−ΔXn′)⋅Dk.n=(ΔXm′−ΔXn′ΔXk′−ΔXm′)⋅Dk.m(3)
جایی که Dمتر _ nDm.nمقدار نابرابری فضای شیء بین تصویر (m) و تصویر (n) است که از سایر مقادیر نابرابری فضای شیء سایر حوزه های استریو مانند پیش بینی یا منتقل می شود. Dک . nDk.nیا Dک . مترDk.m; Δایکسمتر“، Δایکسn“ΔXm′,ΔXn′، و Δایکسک“ΔXk′انحرافات محاسبه شده در جهت اپی قطبی همان نقطه از تصاویر (m، n، و k) هستند.
El v . = (Δ ZΔایکسمتر“– Δایکسn“) ⋅Dمتر _ n= (Δ ZΔایکسک“– Δایکسn“) ⋅Dک . nElv.=(ΔZΔXm′−ΔXn′)⋅Dm.n=(ΔZΔXk′−ΔXn′)⋅Dk.n(4)
جایی که El v .Elv.مقدار ارتفاع مشتق شده بر اساس نابرابری بالای صفحه طرح انتخابی است. Δ ZΔZتفاوت بین دو صفحه فضای شیء موازی انتخاب شده است (در مورد ما Z 0 = 0، سپس Δ Z=زa v gΔZ=Zavg). بنابراین، مقدار مطلق ارتفاع از سطح صفر برابر با محاسبه شده است El v .Elv.مقدار علاوه بر ارتفاع اولین صفحه نمایش (به عنوان مثال، El v . +زa v gElv.+Zavg).
علاوه بر این، بر اساس شکل 3 ، فواصل جابجایی پیکسل های زمین پیش بینی شده به مکان های صحیح املایی در جهت اپی قطبی ( Δایکس“o r t h oΔX′ortho) را می توان به همین روش یافت. این تغییر با استفاده از فرمول فاصله صحیح (CDF) برای هر پیکسل زمین همانطور که در معادله (5) بیان شده است، محاسبه می شود. موقعیت صحیح املایی در هندسه اپی قطبی ساخته شده ( ایکس“o r t h oX′ortho) را می توان همانطور که در همان معادله نشان داده شده است پیدا کرد.
Δایکسکo r t h o‘ = (El v .Δ Z) ⋅Δایکسک“→ایکسکo r t h o‘ =ایکسک“– Δایکسکo r t h o‘ΔXorthok’=(Elv.ΔZ)⋅ΔXk′→Xorthok’=Xk′−ΔXorthok’(5)
جایی که Δایکسکo r t h o‘ΔXorthok’فاصله بین پیکسل زمین ( ایکسک“Xk′) تصویر اپی قطبی (k) به محل صحیح املایی آن ( ایکسکo r t h o‘Xorthok’) در جهت اپی قطبی. مشابه آنچه در شکل 3 نشان داده شده است، فواصل برای تصویر نمایش داده شده (m) و (n) است. Δایکسمترo r t h o‘ΔXorthom’و Δایکسno r t h o‘ΔXorthon’به ترتیب.
3.4. اندازه گیری نقشه نابرابری غنی شده
هنگامی که تصویر مرجع انتخاب شد، یک تکنیک تطبیق استریو کارآمد باید برای اندازهگیری و تولید نقشههای نابرابری اجرا شود. چندین جایگزین برای الگوریتم های تطبیق وجود دارد که می توانند برای ایجاد نقشه های نابرابری اجرا شوند. یک بررسی انتقادی از پیشرفته ترین الگوریتم های تطبیق برای تولید نقشه نابرابری متراکم در [ 24 ] ارائه شد. در این بررسی نتیجهگیری میشود که مناسبترین الگوریتم تطبیق برای مناطق شهری، تکنیک تطبیق نیمه جهانی (SGM) است که در [ 25 ] معرفی شده است زیرا قوی، دقیق و غیر حساس به تغییرات روشنایی و بازتاب است. در نتیجه، مطالعه ما این الگوریتم را برای تولید اطلاعات نابرابری سطحی (SDM) اتخاذ میکند.
برای تولید SDM های مختلف می توان از ترکیب های مختلف جفت استریو استفاده کرد. هر جفت موارد مختلفی از شکافهای انسداد و عدم تطابق دارند که باید پر و اصلاح شوند. بنابراین، توصیه می شود تصویر مرجع را انتخاب کنید تا در مقایسه با سایر استریو میت ها دارای حداقل انسداد باشد. هنگامی که تصویر دامنه/مرجع بین دو تصویر انتخاب می شود، بیشتر مناطق پنهان در این استریو میت ها آشکار می شود. تطبیق تصویر مرجع با سایر استریوهای تصویر اجازه میدهد تا دادههای نابرابری اضافی (که به عنوان دادههای تکمیلی نیز نامیده میشود) تولید شود که امکان پر کردن شکافها و تشخیص نقاط پرت را فراهم میکند. با این حال، بر اساس افست های محاسبه شده در مرحله قبل (یعنی Δ X‘ΔX’، داده های تکمیلی باید با استفاده از DDF مانند رابطه (3) تبدیل شوند تا برای افزایش نقشه های نابرابری مرجع سازگار و قابل استفاده باشند.
ادغام داده های تکمیلی تولید شده با نقشه نابرابری مرجع، امکان پر کردن شکاف ها و در نتیجه غنی سازی نقشه نابرابری مرجع انتخاب شده را فراهم می کند. چندین تکنیک همجوشی برای نقشه های عمق و نابرابری پیشنهاد شده است. تکنیک همجوشی فیلتر 3 بعدی که توسط [ 26 ] توضیح داده شده است، با برخی محدودیت ها، در این مطالعه به دلیل مفهوم ساده، کارایی و دقت آن به کار گرفته شده است. این یک بسط مفهوم فیلتر 2 بعدی میانه است که در آن بعد سوم تعداد نقشه های نابرابری تکمیلی تولید شده را نشان می دهد. در این فرآیند ادغام، یک بررسی سازگاری برای حذف موارد پرت (عدم تطابق) مورد نیاز است. این نقاط پرت دارای اختلاف بیش از یک پیکسل در رابطه با مقادیر مربوطه در نقشه اختلاف مرجع هستند.
البته پس از تقویت نقشه های نابرابری توسط داده های تکمیلی موجود، انتظار می رود مناطق کوچکی که هنوز بدون اطلاعات هستند پیدا شود. با این وجود، این مناطق باید پس از فرآیند پر کردن شکاف به حداقل برسد. اگر هیچ تصویر دیگری برای تولید داده های اضافی وجود نداشته باشد، روش درون یابی می تواند برای پر کردن هر حفره باقی مانده اجرا شود. با این حال، در این زمان، درون یابی را می توان با حداقل ریسک اجرا کرد زیرا شکاف ها و عدم تطابق ها به طور قابل ملاحظه ای کاهش می یابد.
3.5. ایجاد ارتفاعات مشترک ثبت شده
هنگامی که نقشه نابرابری با استفاده از داده های نابرابری تکمیلی ایجاد و بهبود می یابد، SDM حاصل به طور دقیق در تصویر مرجع انتخاب شده ثبت می شود. از آنجایی که مقیاس DEF مانند معادله (4) برای تصویر مرجع محاسبه شده است، SDM افزایش یافته را می توان به داده های ارتفاعی تبدیل کرد که دقیقاً مطابق با تصویر مرجع مطابق با تعریف نابرابری که قبلاً بیان شد، مطابقت دارند. بنابراین، این منجر به LoS-DSM میشود که بر اساس دادههای نابرابری تولید میشود و با دقت در سطح پیکسل به تصویر نوری مرجع انتخابی مربوطه از تصاویر ماهوارهای MIS-VHR ثبت میشود. LoS-DSM به دست آمده بر اساس الگوریتم ما باید معادل الگوریتم اصلی با برخی از مزایای اضافی باشد. برای اهداف ارزیابی، اعتبار روش توسعهیافته در زیر بخش زیر به تفصیل آمده است.
4. اعتبارسنجی روش DECR
روش اعتبار سنجی پیشنهادی برای روش DECR شامل سه مرحله اعتبار سنجی است. این مراحل عبارتند از (1) تایید اپی قطبی و اعتبار سنجی تناسب نابرابری بین تصاویر VHR به کار گرفته شده، (2) اعتبار سنجی کمی ارتفاعات مشتق شده بر اساس اختلاف، و (3) بازرسی کیفی LoS-DSM مشترک ثبت شده. جزئیات بیشتر در بخش های فرعی زیر ارائه شده است.
4.1. تایید اپی قطبی و تناسب بین
تایید اپی قطبی بودن تصاویر اپی قطبی متعدد را می توان به صورت کیفی با چیدمان این تصاویر به صورت افقی و بررسی اینکه آیا نقطه تصویر یکسان در تمام تصاویر اپی قطبی ساخته شده توسط یک خط افقی مستقیم به هم متصل می شود یا خیر، انجام می شود.
از نظر کمی، شرایط اپی قطبی با استفاده از یک تکنیک تطبیق خودکار برای یافتن مجموعهای از تطابقهای نقطه دقیق و محاسبه تفاوتها در نابرابری y (y-پارالاکس) برای همه جفتهای نقطه تأیید میشود. برای این بررسی، تکنیک تطبیق تبدیل ویژگی ثابت مقیاس (SIFT) معرفی شده توسط [ 27 ] به دلیل دقت و قابلیت اطمینان آن انتخاب شده است.
اعتبار سنجی زاویه اپی قطبی محاسبه شده و انحرافات در جهت اپی قطبی ( Δ X‘ΔX’) با محدوده افست ها نشان داده می شود ( Δ Y‘ΔY’) عمود بر جهت اپی قطبی. این محدوده باید در یک پیکسل باشد.
با این حال، برای تایید تناسب نابرابری بین تصاویر اپی قطبی ساخته شده، اگر تصاویر به صورت عمودی با فواصل متناسب با تغییرات محاسبه شده در جهت اپی قطبی چیده شوند، همان نقطه تصویر و تصاویر مربوط به آن باید روی یک خط مستقیم قرار گیرند. شکل 4 این آرایش (اما به صورت افقی) را نشان می دهد که معادله (6) را که شیب خط اعتبار سنجی را نشان می دهد، برآورده می کند.

شکل 4 . اعتبار سنجی بین تناسبی برای مقادیر نابرابری فضای شی از حوزه های مختلف استریو.
Ln oLn m=Dn oDn m= (Δایکسn“– Δایکسo“Δایکسn“– Δایکسمتر“)LnoLnm=DnoDnm=(ΔXn′−ΔXo′ΔXn′−ΔXm′)(6)
که در آن L no فاصله بین خطوط اپی قطبی مربوطه در تصویر اپی قطبی (n) و تصویر (o) است. D no نابرابری فضای شی برای همان نقطه بین تصویر اپی قطبی (n) و تصویر (o) است. به همین ترتیب برای Lnm و Dnm به ترتیب. این نسبت را می توان از اطلاعات جبرانی محاسبه شده در جهت اپی قطبی تعیین کرد (یعنی Δایکس“ΔX′) برای هر تصویر. با شناخته شدن این نسبت، فواصل میانی (Δ ij ) بین تصاویر متوالی (Δ image1، image2 ) را می توان بر اساس قوانین تشابه مثلث اولیه پس از انتخاب تصویر مرجع و دامنه جفت استریو مرجع تعیین کرد. تمام این نمادها در شکل 4 نشان داده شده است.
4.2. اعتبارسنجی ارتفاعات محاسبه شده
پس از ساختن تصاویر اپی قطبی نابرابریهای مربوط به مقیاس به ارتفاع متناظر آنها و استخراج مقدار مقیاس DEF، مقادیر ارتفاع را میتوان از تفاوتهای اندازهگیری شده برای همه پیکسلهای همسان در تصویر مرجع محاسبه کرد. این مقادیر ارتفاعی باید معادل آنهایی باشند که از نظر فتوگرامتری به دست می آیند. از این رو، به عنوان یک مرجع خارجی برای ارزیابی محاسبه ارتفاع مبتنی بر نابرابری پیشنهادی، DSM برای ناحیه تصویربرداری شده باید با رویکرد فتوگرامتری سنتی که قبلاً ارجاع داده شده است، تولید شود. با این حال، مقایسه مستقیم ارتفاعات مشتق شده را نمی توان به سادگی انجام داد. این به دلیل تفاوت پیش بینی بین دو مجموعه داده ارتفاع است. در حالی که DSM فتوگرامتری دارای یک طرح املایی و ارجاع جغرافیایی است،
بنابراین، برای این اعتبار سنجی ارتفاع، مجموعه ای از نقاط به خوبی توزیع شده در LoS-DSM تولید شده باید انتخاب و تصحیح شود تا مکان های املایی آنها با نقاطی که به صورت فتوگرامتری به دست آمده مقایسه شوند. به عنوان یک تکنیک ساده شده، مجموعه ای از نقاط که مراکز سقف های مسطح ساختمان ها را در LoS-DSM تولید شده نشان می دهد، می تواند به صورت دستی با نقاط مربوطه آنها در DSM مشتق شده از فتوگرامتری مطابقت داده شود. از این رو ارتفاعات مربوطه را می توان با یکدیگر مقایسه کرد. این تکنیک برای دور زدن نیاز به ثبت مشترک نقاط در پرسپکتیو LoS-DSM با نقاط متناظر آنها در DSM املایی توصیه می شود.
هنگامی که ارتفاعات متناظر از دو مدل ارتفاعی به طور مشترک ثبت می شوند، می توان تفاوت های ارتفاعی را محاسبه کرد و از این رو معیارهای کیفیت آماری مانند ریشه میانگین مربع خطا (RMSE) و انحراف استاندارد (Std. ) از اختلافات حاصل.
4.3. اعتبار سنجی LoS-DSM مشترک
پس از تولید SDM بهبودیافته (با ادغام نقشههای نابرابری تکمیلی) و استخراج LoS-DSM ثبت شده مشترک در تصویر مرجع نوری، همگنی مقادیر مربوط به همان شی را میتوان به صورت بصری از طریق یک نمایش رندر سهبعدی از تولید شده شناسایی کرد. LoS-DSM و اعتبار کیفی. این بازرسی امکان ایجاد نماهای ایزومتریک از داده های نوری را فراهم می کند که در ارزیابی کیفیت تولید داده های ارتفاعی و ثبت مشترک مفید هستند. معیارهای کیفی مقادیر ارتفاع در مرحله قبل نشان دهنده ارزیابی کمی LoS-DSM مبتنی بر نابرابری است.
هنگامی که دادههای هندسی و نوری یکپارچه تأیید شدند، مجموعه کاملی از دادهها ایدهآل برای کاربردهای استخراج اطلاعات به کمک سه بعدی به دست میآیند. این مجموعه از داده ها باید در یک برنامه نقشه برداری برای یک منطقه شهری متراکم گنجانده شود تا کاربرد آن را نشان دهد. بخش زیر روش پیشنهادی برای این برنامه را شرح می دهد.
5. نمایش کاربردی
ثبت مشترک داده های نوری و ارتفاعی منجر به یک مجموعه داده ایده آل برای کاربردهای استخراج اطلاعات به کمک سه بعدی می شود. در این بخش، تشخیص ساختمان مبتنی بر ارتفاع (EBD) در تصاویر ماهوارهای VHR برای نشان دادن کاربرد ارتفاعهای LoS-DSM مبتنی بر نابرابری که از طریق راهحل بهبودیافته مبتنی بر DECR مشترک ثبت شدهاند، انتخاب شده است. برخلاف فرآیند نشاندادهشده در [ 3 ]، اجرای برنامه EBD در مطالعه ما به معنای اعتبار بخشیدن به حداقل کردن تسکین زمین با نمایش تقریباً اشیاء خارج از زمین است. علاوه بر این، این فرآیند شامل ارجاع جغرافیایی به اشیاء سقف نهایی ساختمان است. EBD پیشنهادی و فرآیند ارجاع جغرافیایی در زیر بخش زیر توضیح داده شده است.
5.1. تشخیص ساختمان مبتنی بر ارتفاع (EBD) و ارجاع جغرافیایی
روش تشخیص ساختمان مبتنی بر ارتفاع شرح داده شده در [ 3 ] برای مطالعه ما انتخاب و اقتباس شده است تا کاربرد LoS-DSM مبتنی بر نابرابری مشترک ثبت شده را نشان دهد. مراحل این روش با شارپ کردن تصویر مرجع برای دسته بندی و نتایج تقسیم بندی بهتر شروع می شود. سپس روش توسعه یافته DECR اجرا می شود. هنگامی که ثبت مشترک داده های نوری به دست آمد، داده های نوری قطعه بندی می شوند و اشیاء پوشش گیاهی سرکوب می شوند. پس از آن، اشیاء ساختمان را می توان به راحتی با استفاده از مقدار آستانه ارتفاع شناسایی کرد. پس از افزایش نتیجه، در نهایت، اشیاء ساختمانی شناسایی شده به موقعیت جغرافیایی صحیح خود ارجاع داده می شوند. تمام این مراحل در شکل 5 نشان داده شده است.
5.1.1. پان-شارپنینگ تصویر ورودی
تصاویر VHR دارای یک باند پانکروماتیک و حداقل چهار باند چند طیفی (قرمز، سبز، آبی و مادون قرمز نزدیک) هستند. وضوح زمین باندهای چند طیفی معمولاً یک چهارم وضوح باند پانکروماتیک است. بنابراین، برای ترکیب این باندها و بهره مندی از مزایای هر دو نوع، باید یک تکنیک ترکیب تصویر اجرا شود. تکنیک UNB pan-harpening معرفی شده توسط [ 28 ] به شدت توصیه می شود. ما اجرای این تکنیک همجوشی را فقط پیشنهاد می کنیم

شکل 5 . تشخیص ساختمان مبتنی بر ارتفاع (EBD) و روش ارجاع جغرافیایی پیشنهادی
برای تصویر انتخاب شده برای اعمال تشخیص ساختمان.
5.1.2. تولید LoS-DSM مبتنی بر اختلاف
برای دستیابی به داده های ارتفاعی ثبت شده مشترک به تصویر نوری VHR مرجع، LoS-DSM باید تولید شود. بنابراین، مراحل روش DECR برای ایجاد یک LoS-DSM مبتنی بر اختلاف و دستیابی به یک مجموعه داده کامل یکپارچه با ثبت مشترک داده های تصویر و ارتفاع، لازم است اجرا شوند.
5.1.3. تقسیم بندی تصویر
برای کاهش پیچیدگی تصویر و تقسیم آن به اشیاء کوچک بر اساس معیار همگنی اطلاعات رنگ، باید یک تکنیک تقسیم بندی تصویر اجرا شود. همانطور که در [ 29 ] نتیجهگیری شد ، تقسیمبندی با وضوح چندگانه معرفی شده در [ 30 ] یکی از مناسبترین تکنیکها برای تقسیمبندی تصاویر VHR از مناطق شهری است. بنابراین، این تکنیک در مطالعه ما برای مرحله تقسیم بندی پذیرفته شده است.
5.1.4. تشخیص ساختمان و افزایش نتایج
برای تشخیص اشیاء ساختمان، یک عملیات آستانه برای ارتفاعات نرمال به دست آمده باید اعمال شود. با این حال، از آنجایی که ارتفاعات نقش مهمی در تشخیص خواهند داشت، سایر ویژگیهای مرتفع، مانند درختان، باید حذف شوند تا از اشتباه گرفتن با اشیاء ساختمان جلوگیری شود. خوشبختانه، شاخص های پوشش گیاهی را می توان به طور موثر برای شناسایی و سرکوب پوشش گیاهی استفاده کرد. شاخص پوشش گیاهی نرمال شده (NDVI)، همانطور که در [ 31 ] توضیح داده شد، یکی از دقیق ترین و محبوب ترین شاخص های پوشش گیاهی است. در مطالعه ما، این شاخص برای سرکوب پوشش گیاهی صحنه انتخاب شده است. پس از سرکوب پوشش گیاهی، اشیاء ساختمان را می توان مستقیماً با اعمال آستانه ارتفاع شناسایی کرد. بهترین مقدار آستانه را می توان به صورت تجربی انتخاب کرد.
از آنجایی که تصاویر VHR خارج از نادر دارای نابسامانی شدید ساختمانی هستند، یک تکنیک تشخیص انسداد باید برای شناسایی مناطق پنهانی که معمولاً نمایانگر ضلع ساختمان (نماها) هستند و ایجاد شکاف ها و نقاط پرت اجرا می شود. رایج ترین تکنیک های تشخیص نواحی مسدود شده در [ 32 ] بررسی شده است. استفاده از تکنیک بررسی چپ-راست را به دلیل کارایی و سادگی آن توصیه می کنیم. پوشاندن مناطق انسداد شناسایی شده باید پشت بام ساختمان را برجسته کند و از این رو نتیجه را به میزان قابل توجهی افزایش دهد.
به طور معمول، نتیجه تشخیص نیاز به اتمام دارد. بنابراین، روش های پس از پردازش باید برای اشیاء سقف حاصل اعمال شود. این روش ها معمولا بر اساس عملیات مورفولوژیکی انجام می شود. توصیه میکنیم مجموعهای از قوانین از چنین عملیاتی را به صورت تعاملی و مؤثر با استفاده از زبان شبکه شناخت (CNL) موجود با بسته نرمافزاری eCognition ایجاد کنید. برای ارزیابی دقت نتیجه، معیارهای ارزیابی مرسوم شرح داده شده در بخش 5.2.1 برای ارزیابی دقت تشخیص ساختمان استفاده می شود.
5.1.5. ارجاع جغرافیایی اشیاء ساختمانی
پس از شناسایی اشیاء ساختمانی و تقویت شکل آنها، این اشیاء باید به مکان های صحیح املایی خود ارجاع جغرافیایی داده شوند. این اجازه می دهد تا ورودی آسان و ادغام با دیگر لایه های GIS موجود. بنابراین، این اشیا باید به مکان های جغرافیایی صحیح خود منتقل و ثبت شوند.
برای تعیین مکان ارجاع جغرافیایی صحیح، دو مرحله مورد نیاز است: (1) حرکت این اجسام به محل ارتووگرافی در جهت اپی قطبی همانطور که در فرمول CDF بیان شده است، و (2) چرخش این اجسام به سمت معکوس جهت چرخش اپی قطبی. (یعنی -θ) در مرحله ساخت اپی قطبی اعمال می شود. برای انجام مرحله اول، اشیاء ساختمان توسط نقاط نماینده (RPs) که در محدوده شیء مربوطه آنها قرار دارند، انتزاع می شوند. برای تضمین اینکه این RP در داخل شکل جسم مربوطه قرار دارد، این نقطه برای نشان دادن مرکز بزرگترین دایره ای که در داخل مرز جسم قرار می گیرد انتخاب می شود. الگوریتم برای محاسبه این مکان نقطه RP توسط [ 33 ] معرفی شده است] . هنگامی که این دو مرحله آسان اجرا می شوند، نقشه ساختمان به دست آمده باید به موقعیت جغرافیایی صحیح ارتووگرافی ارجاع داده شود. آزمون اعتبارسنجی نتیجه ارجاع جغرافیایی در بخش 5.2.2 توضیح داده شده است.
5.2. ارزیابی دقت نقشه برداری
این بخش ارزیابی و ارزیابی دقت را برای نتایج تشخیص و ارجاع جغرافیایی توصیف میکند. هنگامی که اشیاء سقف ساختمان شناسایی می شوند، دقت بر اساس داده های مرجع با استفاده از معیارهای سنتی عملکرد تشخیص ارزیابی می شود. سپس پس از ارجاع جغرافیایی سقف های نقشه برداری شده، نتیجه به دست آمده مورد ارزیابی قرار می گیرد.
5.2.1. ارزیابی دقت EDB
همانطور که در [ 3 ] پیاده سازی شد، دقت تشخیص با مقایسه سقف ساختمان های نقشه برداری شده در برابر یک مجموعه داده مرجع پس از اجرای روش توسعه یافته EBD ارزیابی می شود. کامل بودن، صحت و کیفیت کلی سه معیار پرکاربرد برای ارزیابی عملکرد تشخیص هستند. این معیارهای ارزیابی نسخه اصلاح شده ای هستند که توسط [ 34 ] معرفی شده اند. کامل بودن درصدی از موجودیت های موجود در داده های مرجع است که به درستی شناسایی شده اند. درستی نشان می دهد که نهادهای شناسایی شده چقدر با داده های مرجع مطابقت دارند. کیفیت کلی نتایج یک معیار عملکرد ترکیبی را ارائه می دهد که کامل بودن و صحت را متعادل می کند [ 35 ]. فرمول این اقدامات به شرح زیر است:
کامل بودن ( Comp . ) =TPTP + FNCompleteness(Comp.)=TPTP+FN(7)
درستی ( Corr . ) =TPTP + FPCorrectness(Corr.)=TPTP+FP(8)
کیفیت کلی ( OQ ) =TPTP + FP + FNOverallQuality(OQ)=TPTP+FP+FN(9)
مثبت واقعی (TP) تعداد قطعات سقف ساختمان به درستی شناسایی شده است. منفی کاذب (FN) تعداد بخشهای سقف ساختمان در مجموعه داده مرجع است که شناسایی نشدهاند یا به اشتباه برچسبگذاری نشدهاند. مثبت کاذب (FP) تعداد بخش های سقف ساختمان را نشان می دهد که شناسایی شده اند اما با مجموعه داده مرجع مطابقت ندارند. تعریف این موجودیت های اندازه گیری شده در این مطالعه برای نشان دادن کل مساحت ها (بر حسب پیکسل) که به طبقه سقف ساختمان مربوط می شود، استفاده می شود.
5.2.2. ارزیابی ارجاع جغرافیایی EDB
در بسیاری از موارد، نقشه های مرجع دقیق برای ردپای ساختمان برای منطقه مورد مطالعه در دسترس نیست. بنابراین، برای اهداف اعتبارسنجی، ما تولید یک عکس ارتوفتو را با استفاده از روش سنتی تصحیح افتراقی پیشنهاد میکنیم. این تکنیک مستلزم آن است که داده های ارتفاعی از قبل در دسترس باشد. از این رو، DSM ارجاع داده شده جغرافیایی باید به صورت فتوگرامتری برای منطقه مورد مطالعه قبل از اجرای فرآیند orthorectification مشتق شود. ارتفتو تولید شده به عنوان یک منبع داده مرجع خارجی برای اعتبارسنجی و ارزیابی کیفیت اشیاء سقف ساختمان با ارجاع جغرافیایی استفاده خواهد شد. این اعتبار برای بازرسی بصری سقفهای ساختمانهای دارای ارجاع جغرافیایی به صورت جداگانه (شی به شی) به منظور شمارش صحیح اشیاء جغرافیایی ارجاعشده (90٪ با سقف صحیح همپوشانی دارند) پیشنهاد شده است. این به این دلیل است که فرآیند سنتی اصلاح در مناطق شهری متراکم به خوبی کار نمی کند. اگرچه تصحیح ارتورکتیفیک واقعی بر محدودیتهای فرآیند ارتورکتیفیک سنتی غلبه میکند، تولید یک ارتفتو واقعی پرهزینه، زمانبر و دشوار است.3 ] .
6. داده ها، نتایج، و بحث
نتایج روش توسعهیافته DECR و کاربرد نشاندادهشده آن در کاربرد EBD در این بخش ارائه و بحث میشود. سازماندهی بخش بر اساس توالی روشهای اعتبار سنجی پیشنهادی شرح داده شده در بخش 4 و بخش 5.2 به ترتیب برای روش های DECR و EBD است. داده های آزمون مورد استفاده در آزمایش در زیر بخش زیر توضیح داده شده است.
6.1. مجموعه داده ها و حوزه مطالعاتی
دادههای نوری مورد استفاده در این تحقیق زیرمجموعهای از پنج تصویر VHR استریو است که توسط حسگر خطی WorldView-2 با حالت اسکن فشار-جاروب به دست آمده است. این تصاویر MVIS به همراه اطلاعات مدل سنسورشان موجود است. هر یک از پنج تصویر ماهواره ای MIS-VHR دارای هشت باند طیفی 1000 × 1000 پیکسل و یک باند پانکروماتیک 4000 × 4000 پیکسل با وضوح 2 متر و 0.5 متر است.
داده های VHR در سال 2010 در منطقه شهری متراکم ریودوژانیرو، برزیل به دست آمد. منطقه تصویر شده مربوط به یک شهر مدرن است و ساختمان های زیادی با اشکال و اندازه های مختلف دارد. بیشتر ساختمانها بلند مرتبهای هستند که نمای ساختمان و نمای ساختمان برجسته است. شکل 6 جفت استریوی مرجع انتخاب شده را نشان می دهد (یعنی تصویر مرجع و جفت استریوی آن).
6.2. نتایج روش DECR
6.2.1. نتیجه اپی قطبی و تناسب بین
بر اساس روش توسعهیافته DECR، تصاویر VHR موجود از دادههای آزمایشی دوباره بر روی دو صفحه افقی در ارتفاع متوسط زمین (یعنی Z میانگین = 10 متر) و ارتفاع صفر (یعنی Z 0 = 0 متر ) پیشبینی میشوند. ). برای سادهتر کردن محاسبات، نمونهبرداری مجدد از تصاویر بازپخششده معادل 1 متر مربع در هر پیکسل انجام شد. پس از آن، اطلاعات افست در جهت X و Y سیستم مختصات فضای شی برای هر تصویر MIS-VHR، همانطور که در جدول 1 نشان داده شده است، محاسبه شد .
 (الف)
(الف) (ب)
(ب)
شکل 6 . جفت استریوی مرجع تصاویر ماهواره ای MVIS-VHR. (الف) تصویر مرجع (I-2)؛ (ب) میت استریو (I-3)
آ. مقادیر بر حسب متر هستند (اندازه پیکسل زمین = 1 متر).
برای تایید وضعیت اپی قطبی تصاویر تصحیح شده اپی قطبی، تکنیک تطبیق SIFT برای تولید مجموعه ای از 35 نقطه تطبیق با توزیع خوب اجرا شد. سپس تفاوت در محل تطبیق بین جفت نقطه برای ارزیابی کیفیت وضعیت اپی قطبی محاسبه شد. مقدار RMSE این تفاوت ها 0.29 پیکسل با یک Std پیدا شد. مقدار 0.23 پیکسل این مقادیر تقریب منحنیهای اپی قطبی را تأیید میکنند و موفقیت فرآیند تصحیح اپی قطبی را برای تصاویر ماهوارهای MVIS-VHR نشان میدهند.
جدول 1 مقادیر حداقل، حداکثر و میانگین جابجایی را به ترتیب در جهت X و Y نشان می دهد. می توان اشاره کرد که تغییرات مقادیر بسیار کم است (<1dm) که عمدتاً به دلیل اندازه کوچک منطقه آزمایش است. در این مورد، مقادیر متوسط را می توان به عنوان یک مقدار تعمیم یافته برای کل منطقه آزمایشی – برای ساده کردن محاسبات – به جای استفاده از مقادیر جداگانه هر پیکسل زمین که برای غلبه بر هر عاملی که از تناسب متقابل نابرابری از جمله تغییرات و رانش در مسیر سنسورهای ماهواره ای.
برای تراز کردن ردیف های تصاویر با جهت اپی قطبی، زاویه چرخش جهت اپی قطبی با اتصال یک نقطه مرتفع مشخص به نقاط تطبیق مربوطه و سپس تعیین زاویه اپی قطب نسبت به محور X زمین همانطور که در [ 36 ] توضیح داده شد، تعیین شد. ] . بنابراین، برای این مجموعه داده، چرخش به جهت اپی قطبی 76.4231 درجه بود.
برای ساخت تصاویر اپی قطبی و حفظ روابط متقابل آنها، تصاویر پیش بینی شده با استفاده از زاویه اپی قطبی محاسبه شده چرخانده شدند. علاوه بر این، دادههای آفست محاسبهشده بر اساس همان زاویه چرخانده شدند تا انحرافها را در جهت اپی قطبی و عمود آن (یعنی ΔX’، ΔY’) پیدا کنند. مقادیر افست در این جهت همگی کمتر از 1 پیکسل (یا 1 متر) با حداکثر دامنه حدود 0.75 پیکسل بودند. این نشان دهنده اعتبار کمی زاویه اپی قطبی محاسبه شده، انحرافات محاسبه شده در جهت اپی قطبی، و خطوط اپی قطبی تقریبی تصاویر اپی قطبی ساخته شده است. این اعتبار به صورت بصری در شکل 7 نشان داده شده است. همان نقطه و نقاط مربوط به آن در تمام تصاویر اپی قطبی روی یک خط افقی قرار دارند.
برای اعتبارسنجی تناسب بین مقادیر نابرابری بین تمام تصاویر اپی قطبی، آزمون اعتبار سنجی شرح داده شده در شکل 4 اجرا شد. شکل 8 بر اساس رابطه (5) ساخته شده است. این شکل اعتبار تناسب نابرابری را در بین تمام تصاویر اپی قطبی اثبات می کند. دو خط مستقیم از دو نقطه متفاوت نشان دهنده موفقیت تناسب نابرابری ساخته شده است. این اعتبار، تناسب مقادیر نابرابری را با ارتفاعات مربوطه آنها تأیید می کند.
6.2.2. نتایج ارتفاعات محاسبه شده
از آنجایی که رابطه مقیاس مقادیر نابرابری به دست آمد و اعتبار سنجی شد، دادههای نابرابری سطحی تکمیلی (SDMs) تولید و با استفاده از فیلتر میانه 3 بعدی همانطور که در بخش 3.4 توضیح داده شد، ترکیب شدند. این دادههای نابرابری تکمیلی برای پر کردن شکافهای نابرابری نقشه نابرابری مرجع استفاده شد. با ادغام SDM های تولید شده با مرجع، SDM جفت مرجع انتخاب شده (یعنی Ep-2 و Ep-3) غنی و تقویت شد. شکل 9 SDM های مختلف استخراج شده از جفت های استریو اپی قطبی مختلف را نشان می دهد که با هم ترکیب شده اند تا یک SDM دقیق تر و غنی تر ایجاد کنند. SDM به دست آمده دارای نمایش یکسانی از LoS-DSM متناظر آن است.
همانطور که قبلاً گفته شد، تغییرات افست به دلیل اندازه کوچک منطقه آزمایش تقریبا ناچیز است. بنابراین، برای ساده کردن محاسبات، از میانگین افست هر تصویر در جهت اپی قطبی برای محاسبه فرمول DEF – مانند رابطه (4) – به جای مقدار افست برای هر پیکسل جداگانه که باید در مورد کامل در نظر گرفته شود، استفاده شد. صحنه ها و مناطق تپه ای
بر اساس معادله (4)، مقدار مقیاس محاسبه شده برای جفت استریو مرجع انتخاب شده (I2-I3) 1.912- است. از این رو، داده های ارتفاع مربوط به SDM غنی شده دامنه استریوی مرجع به طور مستقیم برای جفت استریو مرجع انتخاب شده (I2-I3) تولید شد. از آنجایی که این ارتفاعات از صفحه پیشبینی اندازهگیری میشوند (Z av g )، ارتفاع بالاتر از مبدأ آن صفحه پیشبینی (ΔZ = 10 متر) اضافه میشود تا ارتفاع به مبدأ اشاره شود. از این رو،

شکل 7 . اعتبارسنجی اپی قطبی هر نقطه و نقاط مربوط به آن در تمام تصاویر اپی قطبی روی یک خط افقی قرار دارند.

شکل 8 . اعتبارسنجی تناسب بین همه تصاویر اپی قطبی
 شکل 9 . SDM ذوب شده و تقویت شده از جفت های استریو اپی قطبی مختلف بر اساس فرمول تبدیل مقیاس مشتق شده در روش DPP تولید می شود. بر خلاف بقیه جفت ها، جفت Ep-2 و Ep-1 دارای مقادیر منفی است زیرا استریو میت قبل از تصویر مرجع در دنباله اکتساب است.
شکل 9 . SDM ذوب شده و تقویت شده از جفت های استریو اپی قطبی مختلف بر اساس فرمول تبدیل مقیاس مشتق شده در روش DPP تولید می شود. بر خلاف بقیه جفت ها، جفت Ep-2 و Ep-1 دارای مقادیر منفی است زیرا استریو میت قبل از تصویر مرجع در دنباله اکتساب است.
ارتفاعات مشتق شده مبتنی بر نابرابری به عنوان Elv محاسبه می شوند. = 10 – 1.912 × D I2، I3 . دادههای ارتفاع بهدستآمده نشاندهنده LoS-DSM مبتنی بر نابرابری است که در تصویر مرجع با دقت در سطح پیکسل مطابق با تعریف نابرابری ثبت شده است.
برای ارزیابی محاسبه ارتفاع مبتنی بر نابرابری، مجموعهای از نقاط پیوندی که مراکز سقفهای مختلف ساختمانهای مسطح را نشان میدهند به صورت دستی مطابقت داده شدند تا مختصات زمین سهبعدی آنها به درستی مثلث شوند. سپس ارتفاعات حاصل از زمین با مقادیر متناظر آنها که بر اساس روش DECR تولید شده بود، مقایسه شد. ارتفاعات فتوگرامتری با استفاده از نرم افزار فتوگرامتری تجاری پیشرو در صنعت محاسبه شد (PCI Geomatica، نسخه 2015).
بر اساس انتخاب دستی ارتفاعات سقف ساختمان در صحنه، RMSE و Std. محاسبه شد و 1.54 متر (1.5 پیکسل) با Std. مقدار 1.06 متر (1 پیکسل). مقدار RMSE معقول است زیرا کمتر از مقدار آستانه در سطح پیکسل است که برای شناسایی ناسازگاری و نقاط پرت در بین مقادیر نابرابری تکمیلی مربوطه، تولید شده از جفتهای استریو اپی قطبی مختلف، قبل از ترکیب آنها استفاده میشود. علاوه بر این، این آستانه تقریباً دو برابر Std است. مقدار. از این رو، این نشان دهنده دقت بسیار قابل قبول مقدار RMSE به دست آمده است. بنابراین، رویکرد مبتنی بر نابرابری توسعهیافته قادر است دادههای ارتفاعی قابل مقایسه با آنهایی که بهشدت بر اساس رویکردهای فتوگرامتری سنتی با استفاده از نرمافزار تجاری پیشرو در صنعت مشتق شده است، تولید کند.
6.2.3. نتیجه LoS-DSM مشترک ثبت شده
بر اساس روش DECR، LoS-DSM حاصل که در تصویر مرجع انتخاب شده مشترک ثبت شده است، باید اعتبار سنجی شود تا ناسازگاری ارتفاع از طریق بازرسی بصری شناسایی شود. شکل 10 نمای ایزومتریک از LoS-DSM تولید شده و نمایش رندر شده تصویر مرجع مشترک ثبت شده را نشان می دهد. در حالی که شکل 10 (الف) به وضوح ثبات ارتفاع را برای هر سقف ساختمان نشان می دهد، شکل 10 (ب) دقت ثبت مشترک از پیش تعریف شده را با داده های نوری مرجع تأیید می کند. نمایش سهبعدی واقعگرایانه منطقه شهری متراکم به ثبت نام مشترک دادههای ارتفاع تصویر مبتنی بر نابرابری که با استفاده از روش توسعهیافته DECR به دست آمده است، نسبت داده میشود.
 (الف)
(الف) (ب)
(ب)
شکل 10 . جفت استریوی مرجع تصاویر ماهواره ای MVIS-VHR. (الف) تصویر مرجع (I-2)؛ (ب) میت استریو (I-3).
6.3. نتایج روش DECR
برای نشان دادن کاربرد روش توسعهیافته DECR، یک برنامه کاربردی تشخیص ساختمان مبتنی بر ارتفاع برای نقشهبرداری از اشیاء سقف ساختمان بر اساس دقت استخراج ارتفاع، به حداقل رساندن ارتفاع زمین، و ثبت اشتراک در سطح پیکسل با مرجع اجرا شد. تصویر نوری
تشخیص ساختمان عمدتا بر اساس اطلاعات ارتفاع است. از آنجایی که درختان نتایج تشخیص کاذب تولید می کنند، ماسکی بر اساس مقدار NDVI برای حذف همه اشیاء گیاهی ایجاد شد. مقدار آستانه این شاخص به صورت تجربی انتخاب شد و برابر با 0.3 بود. شایان ذکر است که این حذف پوشش گیاهی مبتنی بر NDVI ممکن است بر روی نتیجه تشخیص در موارد روف گاردن یا ساختمان هایی با مقادیر بالای NDVI تأثیر منفی بگذارد. این دو مورد محدودیتی برای این روش حذف پوشش گیاهی ایجاد می کند. با این حال، این موارد به ندرت در بیشتر مناطق شهری ظاهر می شود.
از آنجایی که تصویر مرجع در یک منطقه شهری پرچالش و متراکم به صورت غیر قابل قبول انتخاب شده است، نمای ساختمان ها برجسته است. برای حذف این اشیاء ساختمانی گیج کننده، تکنیک تشخیص انسداد چپ-راست برای شناسایی مناطق پنهان که عمدتاً نمایانگر نمای ساختمان در مورد ما هستند، اجرا شد. شکل 11 نمونه ای از عملکرد این تکنیک را نشان می دهد ( شکل 11 (ج)). کل بیت مپ نمای تولید شده برای تصاویر استریو اپی قطبی انتخاب شده (Ep-2 و Ep-3) در شکل 11 (d) ارائه شده است. این ماسک برای افزایش نتایج تشخیص ساختمان با حذف اضلاع ساختمان و برجسته کردن اشیاء سقف ساختمان استفاده می شود.
نتایج تشخیص میانی در شکل 12 ارائه شده است. مجموعه داده های نوری و ارتفاعی مشترک ثبت شده به ترتیب در شکل 12 (الف) و شکل 12 (ب) نشان داده شده است. شکل 12 (ج) اشیاء خارج از زمین شناسایی شده را بر اساس عملیات آستانه گذاری نشان می دهد. مقدار آستانه بسیار نزدیک به ارتفاع متوسط زمین انتخابی (Z avg ) بود زیرا ارتفاعات به مبدأ ارجاع شده بودند. این نشان دهنده موفقیت کمینه سازی تغییرات زمین است که در روش توسعه یافته DECR توضیح داده شده است. نتیجه تشخیص شکل 12 (c) شامل اشیاء درختی است که در شکل 12 (د) بر اساس یک بیت مپ NDVI فیلتر شده اند.
 (الف)
(الف) (ب)
(ب) (ج)
(ج) (د)
(د)
شکل 11 . تولید نقشه انسداد برای تصاویر استریو مرجع (I-2 و I-3). (الف) زیر مجموعه ای از تصویر مرجع اپی قطبی (Ep-2). (ب) یک زیر مجموعه از تصویر استریو اپی قطبی (Ep-3). ج) انسدادهای شناسایی شده در تصویر مرجع. (د) نقشه انسداد ایجاد شده برای تصویر مرجع اپی قطبی (Ep2).
 (الف)
(الف) (ب)
(ب) (ج)
(ج) (د)
(د)
 (ه)
(ه) (و)
(و)
شکل 12 . نتایج تشخیص ساختمان میانی (الف) تصویر مرجع VHR خارج از نادر اپی قطبی (Ep-2). (ب) LoS-DSM مشترک ثبت شده مبتنی بر اختلاف با استفاده از روش DECR. (ج) اشیاء خارج از زمین را بر اساس عملیات آستانه گذاری با مقدار نزدیک به Z avg شناسایی کرد. (د) اشیاء حاصل پس از سرکوب اشیاء پوشش گیاهی بر اساس یک بیت مپ NDVI. (ه) اشیاء حاصل پس از برداشتن نمای ساختمان. (و) داده های مرجع تولید شده به صورت دستی برای مقایسه.
بر اساس مقدار آستانه انتخاب شده تجربی تولید شده است. این نتیجه با اعمال نقشه انسداد مبتنی بر چپ-راست شکل 11 (d) که برای حذف نماهای ساختمان ایجاد شده است، بیشتر افزایش می یابد. برخی از مراحل پس از پردازش برای افزایش نتیجه تشخیص اعمال شد. این مراحل شامل ادغام اشیاء مجاور و حذف موارد جدا شده از مناطق کوچک است زیرا معمولاً نویز را نشان می دهند. نتیجه نهایی تشخیص پیشرفته در شکل 12 (ه) نشان داده شده است. داده های مرجع مورد استفاده برای ارزیابی نتایج تشخیص در شکل 12 (f) ارائه شده است. این داده ها به صورت دستی تولید شده اند. ارزیابی کمی نتیجه تشخیص نهایی نسبت به داده های مرجع در جدول 2 ارائه شده است .
بر اساس معیار عملکرد ارائه شده در جدول 2 ، تشخیص بسیار موفق بود. این تشخیص با کیفیت بالا به دلیل ادغام اطلاعات ارتفاع است. این اطلاعات یک جزء تشخیص حیاتی برای ساختمان ها از آنجایی که ذاتاً اشیاء مرتفع هستند.
مقدار صحت بالای 95 درصد عمدتاً به دقت بالای داده های ارتفاعی مشتق شده (بر اساس نقشه های نابرابری تکمیلی ذوب شده) که برای تشخیص و ثبت دقیق این داده های ارتفاعی با تصویر مرجع استفاده می شود نسبت داده می شود. این عملکرد نشان دهنده موفقیت روش توسعه یافته DECR است. علاوه بر این، کیفیت تولید داده های ارتفاعی و ثبت مشترک نیز در کامل بودن بالای 96 درصد منعکس می شود. با این حال، نقش ترکیب نقشههای بیتی نما بر اساس تکنیک بررسی چپ-راست، تشخیص نادرست را به شدت کاهش داد، که منجر به مقدار اندازهگیری کاملتر شد.
به عنوان یک شاخص ترکیبی از معیارهای عملکرد صحیح و کامل، معیار کیفیت کلی (OQ) کیفیت بالای نتایج تشخیص ساختمان را تأیید می کند. این کیفیت را می توان با مقایسه بصری داده های مرجع در شکل 12 (f) با نتایج تشخیص نهایی در شکل 12 (ه) مشاهده کرد. نتیجه تشخیص ساختمان در تصاویر VHR خارج از نادر با کیفیت کلی 92 درصد در یک منطقه شهری متراکم چالش برانگیز در واقع موفقیت قابل توجهی است که کاربرد روش توسعه یافته DECR را در یک برنامه EBD نشان می دهد.
6.4. نتایج EBD نقشه ارجاع جغرافیایی
پس از نقشه برداری از اشیاء سقف ساختمان و ارزیابی عملکرد تشخیص، اشیاء ساختمانی به دست آمده باید به مکان های زمینی صحیح خود ارجاع جغرافیایی داده شوند تا برای ادغام در سیستم های GIS و ادغام با سایر لایه های GIS آماده شوند. فرآیند ارجاع جغرافیایی شرح داده شده در بخش 5.1.5 برای حذف اثرات پرسپکتیو تصویر VHR خارج از نادر و سپس اعمال ارجاع جغرافیایی اجرا شد. موقعیت جغرافیایی صحیح در جهت اپی قطبی بر اساس رابطه (5) با استفاده از ارتفاعات مشتق شده، ارجاع شده از صفحه طرح ریزی (Z avg )، در نقطه RP هر شی ساختمان محاسبه شد. برای تصویر مرجع انتخاب شده، مقادیر مورد استفاده برای ΔZ 10m و برای ΔX’ 7352/6- متر است.
نتیجه ارجاع جغرافیایی بهدستآمده همانطور که در بخش 5.2.2 توضیح داده شد بر اساس یک تصویر ارتو ارزیابی شد. بنابراین، یک DSM متراکم ژئو مرجع به صورت فتوگرامتری بر اساس رویکرد سنتی استخراج شد و سپس برای ایجاد یک تصویر ارتو برای منطقه مورد مطالعه استفاده شد. این تصویر ارتو به عنوان یک مرجع خارجی برای ارزیابی دقت فرآیند ارجاع جغرافیایی نقشه ساختمان استفاده شد.
شکل 13 (الف) نتیجه تشخیص را در حوزه تصویر اپی قطبی که روی تصویر مرجع اپی قطبی (I-2) پوشانده شده است، نشان می دهد. شکل 13 (ب) نتیجه ارجاع جغرافیایی را نشان می دهد که روی تصویر ارتو ایجاد شده پوشانده شده است. شکل 13 (ج) نتایج تشخیص ساختمان پیشرفته را نشان میدهد که به مکانهای فضای شی درست ارجاع داده شده و به عنوان یک لایه GIS تهیه شده است.
 (الف)
(الف) (ب)
(ب) (ج)
(ج)
شکل 13 . نتیجه تشخیص ساختمان در هر دو حوزه تصویر اپی قطبی و حوزه زمین مرجع جغرافیایی. (الف) اشیاء ساختمانی شناسایی شده در حوزه تصویر مرجع اپی قطبی؛ (ب) اشیاء ساختمانی با ارجاع جغرافیایی که روی تصویر ارتوی تولید شده قرار گرفته اند. (ج) لایه GIS حاصل.
پس از یک ارزیابی کیفی از orthoimage ایجاد شده، مشخص شد که 98٪ از سقف های ساختمان به درستی ژئو ارجاع داده شده اند. این داده های ارتفاعی مشتق شده بر اساس اطلاعات نابرابری تولید شده را تایید و اعتبار بیشتری می کند. در مقابل، 2٪ (3 از 165 شی) از اشیاء ساختمانی ژئو ارجاع داده شده در موقعیت جغرافیایی نادرست قرار داشتند. دلیل آن ارتفاع نادرست برای محاسبه این موقعیت جغرافیایی در جهت اپی قطبی است. این ارتفاع در نقطه RP شی ساختمان همانطور که قبلا توضیح داده شد استخراج شد. برای سقف های ساختمان های غیر مسطح، محل RP انتخاب شده در مطالعه ما ممکن است در مقدار ارتفاعی نباشد که به مکان مرجع جغرافیایی صحیح منجر می شود. این موارد بسیار کم هستند و به راحتی می توان آنها را به صورت دستی شناسایی و اصلاح کرد.
شکل 14 چهار مورد از نتایج به دست آمده ارجاع جغرافیایی را نشان می دهد. از یک طرف، ردیف بالایی این شکل، نتیجه تشخیص را در حوزه تصویر اپی قطبی (Ep-2) همراه با موقعیت جغرافیایی صحیح شی ساختمان شناسایی شده در جهت اپی قطبی نشان می دهد. جابجایی اشیاء شناسایی شده به محل صحیح در حوزه اپی قطبی برابر است با فاصله بین نقطه RP ساختمان شناسایی شده (که با یک مثلث در شکل 14 نشان داده شده است) و مکان صحیح شی ساختمان (که با مربع در شکل 14 نشان داده شده است ) همانطور که در همان شکل نشان داده شده است.
از طرف دیگر، ردیف پایین شکل 14 نتیجه ارجاع جغرافیایی را نشان می دهد که روی تصویر ارتوی تولید شده قرار گرفته است. بر اساس ارزیابی بصری، نتیجه ارجاع جغرافیایی بسیار موفق است. برای شکل 14 (d2)، علیرغم عدم تراز بین سقف ساختمان در تصویر ارتو و شی ژئو ارجاع داده شده مربوطه، مکان شی سقف ژئو مرجع صحیح است. این به این دلیل است که انحراف ساختمان بلند (بیش از 135 متر بالاتر از زمین محلی) به طور کامل از ارتوایماژ حذف نشده است. از این رو، منبع این ناهماهنگی در داده های مرجع است، نه اشیاء مرجع جغرافیایی. شکل 14نشان دهنده موفقیت فرآیند ارجاع جغرافیایی پیشنهادی است. نتیجه نهایی ارجاع جغرافیایی برای ادغام مستقیم در یک سیستم GIS پردازش شد. در این مرحله، چرخه استخراج اطلاعات و نقشه برداری است

شکل 14 . چند نمونه از اشیاء سقف با ارجاع جغرافیایی برای ارزیابی بصری. ردیف بالایی اشیاء سقف شناسایی شده را به همراه محل RP آن نشان می دهد. در همین ردیف، مکان صحیح محاسبه شده شیئی که قرار است به آن منتقل شود به همراه نقطه RP جدید آن را نشان می دهد.
تکمیل شده برای کاربرد تشخیص ساختمان در تصاویر VHR خارج از نادر.
7. نتیجه گیری
در این مطالعه، مشکل ثبت مشترک داده های نوری-ارتفاعی بررسی می شود. راه حل معرفی شده مبتنی بر تولید داده های ارتفاعی مبتنی بر اختلاف است که با یکی از تصاویر VHR به کار گرفته شده است. ثبت مشترک با دقت در سطح پیکسل با استفاده از یک رویکرد بهبود یافته برای توسعه LoS-DSM از یک نقشه نابرابری غنی شده به دست می آید. این نقشه از تصاویر مختلف ماهوارهای MIS-VHR با ترکیب دادههای نابرابری تکمیلی به دست آمده از ترکیبهای جفت استریو همانطور که در روش DPP اخیراً معرفی شده ما توضیح داده شده است، تولید میشود. سپس، ارتفاعات LoS-DSM به طور مؤثر بر اساس DEF (فرمول اختلاف به ارتفاع) روش DECR توسعهیافته در این مطالعه استخراج میشوند.
روش توسعهیافته DECR که توسعهای از روش DPP است، بر پایه ایجاد یک رابطه مبتنی بر مقیاس بین دادههای نابرابری و ارتفاع در فضای شی است. مفهوم اصلی DECR این است که تصاویر MIS-VHR را مجدداً بر روی یک صفحه افقی فضای شی در ارتفاع متوسط زمین منطقه تصویربرداری شده پخش کند. این بازپخش عمدتاً برای ایجاد تناسب خطی در میان نابرابریهای فضای شی مربوطه و با ارتفاعات متناظر آنها است. این ویژگی اجازه می دهد تا داده های نابرابری تکمیلی برای پر کردن شکاف های نابرابری SDM مرجع استفاده شود. علاوه بر این، این ویژگی امکان استخراج مستقیم ارتفاعات فضای شی را از SDM غنی شده (بدون شکاف) می دهد. این ارتفاعات مبتنی بر اختلاف مشتق شده نشان دهنده LoS-DSM ثبت شده مشترک در تصویر نوری مرجع انتخاب شده است.
روش توسعهیافته DECR از نظر وضعیت اپی قطبی تصاویر پیشبینیشده، تناسب نابرابری بین تصاویر پیشبینیشده، دقت ارتفاع بهدستآمده بر اساس دادههای نابرابری تولید شده، و دقت ثبت مشترک ارتفاع به یکی از اپتیکالهای بکار گرفته شده با موفقیت تأیید شد. تصاویر.
برای اهداف نمایش قابلیت اجرا، یک روش EBD برای شناسایی سقف های ساختمان با استفاده از LoS-DSM مبتنی بر اختلاف به دست آمده توسعه و اجرا شد. نتیجه تشخیص برای اشیاء خارج از زمین با یک مقدار آستانه نزدیک به صفر بالاتر از سطح متوسط زمین انتخاب شده به دست آمد. این نشان دهنده یک مزیت نسبت به الگوریتم اصلی LoS-DSM است. هنگامی که تشخیص ارزیابی شد، نتیجه بر اساس معیارهای عملکرد سنتی (کامل بودن، درستی و کیفیت کلی) بسیار موفق بود. این نشاندهنده به حداقل رساندن موثر تغییرات زمین-تسکین است که نیاز به یک الگوریتم نرمالسازی ارتفاع را در مناطق شهری متراکم با تغییرات زمین متوسط کاهش میدهد.
معیار کیفیت کلی 92% بود که دقت موفقیت آمیز محاسبه داده های ارتفاعی مبتنی بر اختلاف و ثبت مشترک داده های ارتفاع نوری را ثابت می کند. در حالی که تشخیص صحیح 95% به کیفیت بالای تولید داده های ارتفاعی (براساس نقشه های نابرابری غنی شده و افزایش یافته) و ادغام نسبت داده می شود، 96% تشخیص کامل ناشی از دقت تشخیص تصفیه شده بر اساس انسداد و بیت مپ نما تولید شده با استفاده از تکنیک چک کردن چپ-راست.
علاوه بر کیفیت تشخیص بالای به دست آمده، اشیاء سقف ساختمان تولید شده به مکان صحیح فضای شیء خود ارجاع داده شدند تا امکان ادغام مستقیم با لایههای GIS موجود را فراهم کنند. فرآیند ارجاع جغرافیایی بر اساس جابجایی سقفهای ساختمان شناساییشده به محل صحیح ارتو در حوزه اپی قطبی تصویر مرجع است. مکانهای محاسبهشده با استفاده از یک تصویر ارتوی تولید شده برای منطقه مورد مطالعه با استفاده از بسته نرمافزاری تجاری فتوگرامتری (PCI Geomatica) اعتبارسنجی شدند. نتیجه ارزیابی تقریباً 100٪ بر اساس ارزیابی بصری اشیاء سقف جغرافیایی ارجاع شده بود که 90٪ ≥ با موقعیت زمین صحیح سقف های ساختمان مربوطه در تصویر ارتو همپوشانی دارند. این نتیجه موفقیتآمیز ارجاع جغرافیایی نقشه سقف ساختمان ایجاد شده، دقت دادههای ارتفاعی مبتنی بر اختلاف مشتق شده را نشان میدهد. علاوه بر این، امکان ادغام مستقیم با لایه های موجود سیستم های GIS را فراهم می کند.
محدودیت شناساییشده در روش توسعهیافته DECR، کاربرد آن تنها برای تصاویر MVIS-VHR است که توسط حسگرهای خطی فشار جارو بهدست میآیند. علاوه بر این، به حداقل رساندن تغییرات زمین با طرح ریزی مجدد بر روی سطح متوسط زمین ممکن است در مناطق تپه ای و کوهستانی کافی نباشد. برای روش توسعهیافته EBD، محدودیت شناسایی شده، تشخیص و حذف پوشش گیاهی بر اساس آستانه مبتنی بر NDVI است. این شاخص پوشش گیاهی ممکن است در موارد روف گاردن و ساختمان هایی با مقادیر NDVI بالا، خطاهایی ایجاد کند.
بنابراین، کار آینده باید این محدودیت ها را برطرف کند و تکنیک DECR را به گونه ای گسترش دهد که در یک رویکرد مبتنی بر کاشی قابل اجرا باشد تا حتی در مناطق تپه ای و بزرگ کار کند.
منابع


بدون دیدگاه