

هدف این مقاله ارزیابی روشهایی است که از طریق آنها میتوان از روشهای طبقهبندی مبتنی بر اشیاء با وضوح چندگانه برای گروهبندی محیطهای شهری متشکل از مخلوطی از ساختمانها، عناصر فرعی مانند پارکینگ، جادهها، سایهها و پیادهروها و شاخ و برگهایی مانند چمن استفاده کرد. و درختان این شامل استفاده از وسایل نقلیه هوایی بدون سرنشین (پهپاد) است که تصاویر ارتوموزاییکی با وضوح بالا ارائه میکنند و یک مدل سطح دیجیتال (DSM) تولید میکنند. برای منطقه مورد مطالعه انتخاب شده برای این مقاله، از 400 تصویر ارتو با وضوح فضایی 7 سانتی متر برای ساخت تصاویر ارتو و DSM استفاده شد که با استفاده از شبکه توزیع شده نقاط کنترل زمینی (GCPs) از 12 نقطه مرجع (RMSE = 8) ژئو ارجاع داده شد. سانتی متر). از آنجایی که اینها با گیرندههای 2 فرکانس مجهز به RTK-GNSS ترکیب شدند، اگر داده ها با جهت گیری سنسور غیرمستقیم سنتی جمع آوری شده بودند، آنها قادر بودند جهت گیری بلوک مطلق را ارائه دهند که محدوده دقت مشابهی داشت. جهت گیری حسگر غیرمستقیم سنتی شامل گیرنده GNSS در پهپاد است که سیگنال دیفرانسیل را از ایستگاه پایه از طریق یک پیوند ارتباطی دریافت می کند. این امکان تعیین موقعیت دقیق پهپاد را فراهم میکند، زیرا RTK از تصحیح استفاده میکند و امکان ردیابی موقعیت، سرعت، ارتفاع و حرکت و همچنین اندازهگیری دادههای خام حسگر را میدهد. با ارزیابی نتایج ماتریس های سردرگمی، می توان دریافت که دقت کلی طبقه بندی شی گرا 84.37٪ بود. این دارای کاپا کلی 0.74 است و داده هایی که دقت طبقه بندی ضعیفی داشتند شامل سایه، پارکینگ ها و روسازی های بتنی است. اینها دارای دقت تولید کننده (دقت) 81٪ بودند.
کلید واژه ها
طبقهبندی شی گرا ، سینماتیک بلادرنگ ، DSM ، تصاویر اورتوی پهپاد ، موزاییک ، عناصر فرعی متمایز شهری
1. مقدمه
در سال های اخیر، فتوگرامتری به عنوان یک روش نقشه برداری بسیار خوب در هنگام تلاش برای تولید تصاویر سه بعدی از سطح زمین شناخته شده است. این به این دلیل است که میتوان از آن در صورت تقاضا استفاده کرد و توانایی ایجاد دادههای با وضوح بالا، از جمله لایههای DSM و عکسهای ارتو (تصاویر اصلاحشده) را دارد. فتوگرامتری شامل تجزیه و تحلیل داده های زمینی (زمینی) یا کمپین های اختصاصی هوا و فضا است [ 1 ] [ 2 ] [ 3 ]. از فتوگرامتری می توان در صنایع مختلفی از جمله نقشه برداری و برنامه ریزی شهری [ 4 ] [ 5 ]، کشاورزی، مدیریت منابع [ 6 ] [ 7 ]، ثبت ویژگی های باستان شناسی [ 8 ] [ 9 ] استفاده کرد.] و هیدرولوژی و مدلسازی سیل هیدرودینامیکی [ 10 ] [ 11 ] [ 12 ] . به دلیل کاربردهای آن، استفاده از فتوگرامتری در علوم زمین نیز افزایش یافته است، جایی که می توان از آن برای نقشه برداری، نظارت [ 13 ] [ 14 ] و تشخیص اشیاء [ 15 ] و تغییرات گروهی در توپوگرافی استفاده کرد [ 16 ] .
علیرغم کاربردهای آن، در گذشته استفاده از فتوگرامتری هوایی محدود بوده است. این به این دلیل است که به عنوان روشی پرهزینه برای جمعآوری دادهها دیده میشد و اغلب هنگام تلاش برای جمعآوری دادههای توپوگرافی سهبعدی، عکسهای ارتو، نقشههای توپوگرافی و سایر ویژگیهای نقشه به دلیل دوربینهای متریک با فرمت بزرگ که استفاده میشد، با مشکلاتی مواجه میشد [ 17 ].] . با این حال، توسعه وسایل نقلیه هوایی بدون سرنشین (پهپادها) کمک کرده است تا فتوگرامتری وسیله ای قابل دسترس تر شود، اگر جمع آوری داده ها امکان جمع آوری تصاویر با وضوح فضایی و طیفی بالا را فراهم کند، به گونه ای که بتواند در هزینه و زمان صرفه جویی کند. این پیشرفتهای تکنولوژیکی امکان تهیه نقشهبرداری با کیفیت از سطح زمین با استفاده از Orthoimages را فراهم میکند و همچنین به این معنی است که مدلهای سه بعدی (مشهای) سطح زمین را میتوان با وضوح و دقت بالا ایجاد کرد. علاوه بر این، پیشرفتها در سختافزار کامپیوتر و نرمافزار تطبیق تصویر نیز به این معنی است که میتوان تصاویر استریو را سریعتر و دقیقتر از همیشه مقایسه کرد، بنابراین فتوگرامتری جایگزین مناسبی برای عکاسی هوایی سرنشیندار [ 18 ] [ 19 ] [ 20 ] شد.] . با وجود این مزایا، پهپادها اغلب دارای محدودیتهای وزنی و هزینهای هستند که به این معنی است که سنسورهای استفاده شده در آنها اغلب کیفیت پایینتری نسبت به حسگرهایی دارند که در عکاسی هوایی سرنشین دار استفاده میشوند. این می تواند به این معنی باشد که وقتی حسگر نیاز به ارائه داده های دقیق بر حسب سانتی متر دارد، این رویکرد سنتی ممکن است نتایج مناسبی را ارائه نکند مگر اینکه تعداد زیادی از نقاط کنترل گروهی (GCPs) به طور مساوی در سراسر نمونه توزیع شوند. این می تواند به این معنی باشد که یک پروژه بسیار گران می شود یا غیر عملی است و حتی ممکن است به این معنی باشد که زمین های غیرقابل دسترس در نمونه گنجانده شده است. به منظور ایجاد تصاویر همپوشانی در یک پیکربندی بلوک، مهم است که موقعیت هوایی دقیقاً کنترل شود، که می تواند به کاهش نیاز به چندین GCP کمک کند [ 21 ].
همچنین پیشرفتهایی در سیستمهای ماهوارهای ناوبری جهانی (GNSS) صورت گرفته است، که میتوان آنها را از نظر این مقاله جالب توجه کرد. استفاده از دستگاههای سینماتیک بلادرنگ (RTK) در پهپادهایی که به راحتی در دسترس هستند، افزایش یافته است. این جالب است زیرا استفاده از RTK به این معنی است که موقعیت پهپاد را می توان به راحتی ردیابی کرد و همچنین می تواند به اطمینان از دقیق تر بودن داده های ارائه شده (تا 2 سانتی متر) کمک کند [ 22 ]. پهپادهایی که از این نوع فناوری استفاده می کنند می توانند سیگنال ها را بین ماهواره ها و گیرنده ها با استفاده از فاز حامل GNSS تعدیل کنند [ 23 ]] . گیرنده GNSS در پهپاد سیگنال دیفرانسیل را از ایستگاه پایه دریافت می کند که توسط RTK تصحیح می شود و امکان ایجاد یک لینک ارتباطی را فراهم می کند. جدیدترین پهپادها اکنون دارای واحدهای RTK هستند و از فرکانس دوگانه استفاده می کنند که می تواند به کاهش تأخیر جوی کمک کند و مکان دقیق تری را ارائه دهد. در مقایسه با یک فرکانس، وضوح ابهام نیز بسیار سریعتر است [ 24 ].
پیشرفتها در سنجش از دور کمک کرده است تا پهپادها ابزارهای جمعآوری اطلاعات مفیدتر و مؤثرتر از همیشه باشند، زیرا به این معنی است که پهپادها اکنون توانایی ترکیب سنجش زمانی و مکانی را دارند. این امکان تشخیص دقیقتر ویژگیها را فراهم میکند، که در عین مثبت بودن، میتواند به این معنی باشد که تصاویر تولید شده در معرض نویز سایهها یا اثر نمک و فلفل هستند [ 25 ] [ 26 ] [ 27 ]. این به دلیل ماهیت پیکسل ها و نحوه رفتار آنها در هنگام افزایش وضوح فضایی یک تصویر است. مطالعات نشان دادهاند که افزایش وضوح فضایی یک تصویر میتواند تأثیر منفی بر دادهها داشته باشد، زیرا تکنیکهای مبتنی بر پیکسل میتوانند شناسایی دقیق ویژگیها را چالش برانگیز کنند [ 28 ] [ 28].29 ] . به منظور غلبه بر کاستیهای تکنیکهای مبتنی بر پیکسل، محققان به سمت استفاده از تکنیکهای طبقهبندی شی گرا در هنگام مشاهده تصاویر با وضوح فضایی بسیار بالا [ 30 ] تمایل دارند، در حالی که استفاده از Orthoimages در این تنظیمات بهطور گسترده مورد استفاده قرار نمیگیرد، به ویژه از نظر نگاشت v ویژگی ها. در یک مطالعه، مشخص شد که استفاده از پهپادها برای شناسایی گونههای درختی در جنگلهای شمالی مختلط نتایجی با دقت 82 درصد دارد [ 30 ]] . همچنین مشخص شده است که پهپادها هنگام نقشه برداری گیاهان خاص در جنگل های باز بسیار مفید هستند. مطالعه چناری و همکاران. (2017)، با هدف تخمین میانگین سطح تاج درختان تک سطح وحشی در جنگلهای باز و طبقهبندی تصاویر ارتوی جمعآوریشده با استفاده از روش شیگرا انجام شد. این به دقت طبقه بندی 0.90 و نمره دقت 0.89 [ 31 ] داد. پهپادها همچنین میتوانند برای طبقهبندی محیطهای شهری با دقت بیشتر استفاده شوند [ 32 ] [ 33 ]، بهویژه هنگام استفاده از Orthoimages و DSM، زیرا این موارد هنگام شناسایی اشیاء مرتفع در صحنههای شهری مفید هستند [ 34 ] [ 35 ].
با این حال، این الگوریتمهای تشخیص ساختمان بدون مشکل نیستند و میتوانند برای شناسایی ساختمانها در زمانی که کمتر از 50 کیلومتر مربع هستند مشکل داشته باشند .یا ساختمان روی زمین شیبدار است. این به ویژه در سکونتگاههای معمولی رایج است، به این معنی که این الگوریتمهای تشخیص برای استفاده در این نوع مناطق مناسب نیستند. به منظور حصول اطمینان از اینکه ساختمانها در این مناطق میتوانند نقشهبرداری شوند، مهم است که ویژگیهای دو بعدی و سه بعدی تجزیه و تحلیل شوند تا در هنگام طبقهبندی منطقه دقت بالایی به دست آید. بنابراین، هدف این تحقیق، ارزیابی اثربخشی نرمافزار تحلیل تصویر شیگرا eCognition (Definiens Imaging، آلمان) در محیطهای شهری است که شامل ویژگیهایی مانند ساختمانها، جادهها، پارکینگها و پوشش گیاهی است. این کار با ترکیب موزاییک-تصاویر با وضوح فضایی بالا و لایههای DSM انجام میشود تا بتوان ویژگیهای محیط را گروهبندی کرد.
2. سایت مطالعه
سایت انتخاب شده برای این تحقیق دانشگاه علم و صنعت اردن (JUST) بود. این پردیس که در سال 1986 تاسیس شد و توسط معمار ژاپنی Tange طراحی شد، ترکیبی از سبک آینده نگر و پایداری است. در 70 کیلومتری شمال پایتخت امان و 6 کیلومتری جنوب الرمثه در 32˚28’36.77″ شمالی و طول جغرافیایی 35˚58’24.05″ همانطور که در شکل 1 نشان داده شده است، واقع شده است. این پردیس دارای ارتفاع 580 متری و مساحت 11 کیلومتر مربع است که شامل ساختمان ها و مناطق طبیعی می شود. JUST به طور کلی به دو نیمه تقسیم می شود، دانشکده های پزشکی که در قسمت پایین شکل 1 دیده می شود و دانشکده های مهندسی که در قسمت بالایی شکل 1 دیده می شوند.. ساختمانها از دو محور اصلی پیروی میکنند، ستون دانشگاهی، که در آن ساختمانهای سخنرانی وجود دارد، و ستون اجتماعی، که شامل خدماتی مانند کتابخانه، مسجد و اقامتگاه است.
3. اکتساب تصاویر
3.1. توضیحات پهپاد و سنسور
MARSRobotics® Talon با بال های ثابت، همانطور که در شکل 2 مشاهده می شود(الف)، به عنوان پهپاد در این مطالعه استفاده شد و تمامی پروازها را انجام داد. این پهپاد با استانداردهای طراحی پهپاد مطابقت دارد و توسط حمل و نقل کانادا، کمیسیون مقررات هوانوردی مدنی اردن (JCARC) و همچنین اداره هوانوردی فدرال (FAA) در ایالات متحده تایید شده است. MARSRobotics® Talon یک پرتاب دستی در هنگام برخاستن از زمین است. دارای یک موتور 530 کیلوولت براشلس است که با دو باتری 6 سلولی 4500 میلی آمپر ساعتی تغذیه می شود که دو ساعت پرواز با بار کامل را برای آن فراهم می کند. هنگام کروز می تواند به سرعت 72 کیلومتر در ساعت (20 متر بر ثانیه) برسد و قادر است به حداکثر سرعت 85 کیلومتر در ساعت (23.6 متر بر ثانیه) برسد. همچنین میتواند در هنگام پرواز تا سرعت 35 کیلومتر بر ساعت باد و زمانی که چتر به کار افتاده است، با سرعت 25 کیلومتر در ساعت کار کند. می توان آن را از راه دور در شعاع 15 کیلومتری توسط یک کنترلر دستی کنترل کرد یا می توان از نرم افزار Pixhawk که توسط PX4 ایجاد شده و توسط روباتیک سه بعدی ساخته شده است استفاده کرد که به MARSRobotics® Talon امکان پرواز مستقل را می دهد. حداکثر وزن در هنگام برخاستن تا 3.5 کیلوگرم (7.7 پوند) است و MARSRobotics® Talon می تواند در صورت نیاز به ارتفاع 2000 متری (3.1 مایلی) بالاتر از سطح دریا برسد. کنترلر اطلاعات مربوط به پرواز مانند ارتفاع، وضعیت باتری و مسافت طی شده را نمایش می دهد. جدول زیر ویژگی های فنی MARSRobotics® Talon را نشان می دهد ( وضعیت باتری و مسافت طی شده جدول زیر ویژگی های فنی MARSRobotics® Talon را نشان می دهد ( وضعیت باتری و مسافت طی شده جدول زیر ویژگی های فنی MARSRobotics® Talon را نشان می دهد (جدول 1 ).

شکل 1 . نقشه مکان دانشگاه علم و فناوری اردن (JUST) و طرح پردیس JUST (منبع: واحد مهندسی در JUST).
3.2. سیستم دوربین
MARSRobotics® Talon دارای یک دوربین دیجیتال تک لنز رفلکس (DSLR) SONY A6000 (ILCE-6000L) است، همانطور که در شکل 2 (ب) مشاهده می شود، که توسط باتری قابل شارژ خود تغذیه می شود. این دوربین دارای یک سیستم عکس پیشرفته 24.3 مگاپیکسلی (APS) Type-C (کلاسیک) است که شامل سنسور، ویژگی فوکوس خودکار هیبریدی و سرعت عکاسی پیاپی تا 11 فریم در ثانیه است. دارای سنسور مکمل اکسید فلزی نیمه هادی (CMOS) (23.5 × 15.6 میلی متر). داده ها به صورت 8 بیتی در دو فرمت JPEG و RAW با وضوح 4000 × 6000 پیکسل ضبط می شوند. این لنز از 16 تا 50 میلیمتر متغیر است و دارای زوم قدرت با زاویه دید 83 تا 32 درجه است که در جدول 2 مشاهده میشود . این دوربین توسط یک گیمبال روی پهپاد نگه داشته میشود، زیرا زاویه دید ثابتی را تضمین میکند، به این معنی که تصاویر نزدیک به نادر ارائه میشوند.
3.3. واحد کنترل
نحوه کنترل پرواز برای MARSRobotics® Talon بسیار مهم است. پهپادهایی مانند این را میتوان به روشهای مختلفی کنترل کرد، مانند سیستمهای خلبان خودکار مجهز به GPS یا با استفاده از سختافزار کنترلشده رادیویی. در این مطالعه از سیستم خلبان خودکار Pixhawk برای کنترل پهپاد استفاده شد. این یک سیستم خلبان خودکار منبع باز است که برای کاربران سیستم های مستقل ارزان قیمت عرضه شده است
هواپیما این یک انتخاب خوب بود زیرا یک سیستم کم هزینه است و به راحتی در دسترس است. گیرنده RTKite GNSS برای برنامه ریزی GCP ها و نقاط بازرسی استفاده شد. این 444 کانال دارد و می تواند فرکانس های L1 و L2 و همچنین صورت فلکی GPS و GLONASS را دریافت کند. این می تواند مستقیماً با کنترلر Pixhawk متصل شود. پردازش دیفرانسیل GNSS CGP و نقاط بازرسی با هسته 32 بیتی ARM Cortex M4 Pixhawk با FPU انجام شد. گیرنده GNSS دارای دو دسته است، سه آنتن اضافی برای اندازهگیری موقعیت و دو آنتن برای اندازهگیری دیفرانسیل (GNSS RTK)، که اطمینان میدهد دادهها در زمان واقعی به پیوند داده منتقل میشوند و سپس به ایستگاه پایه باز میگردند. اتصال بین سنسورهای GNSS و کنترلکننده Pixhawk از ایستگاههای مرجع دائمی (CORS) با یک مودم سلولی GSM/GPRS تعبیهشده استفاده میکند.
3.4. نرم افزار
3.4.1. برنامه ریز ماموریت
Misson Planner نرم افزاری است که توسط ArduPilot توسعه یافته است که امکان برنامه ریزی مسیر پرواز را فراهم می کند. این یک سیستم نرم افزار کنترل زمینی (GCS) است و می تواند برای سیستم های آزمایشی منبع باز APM و Pixhawk استفاده شود. استفاده از Mission Planner به ارتقای سفتافزار و پیکربندی سیستم خلبان خودکار و همچنین اطمینان از جمعآوری اطلاعات تلهماتیک زنده و امکان برنامهریزی یک ماموریت یا مسیر پرواز در پهپاد اجازه میدهد. Pix4D Mapper Pro برای پردازش فتوگرامتری تصاویر جمع آوری شده توسط پهپاد استفاده شد. این نرم افزار به کاربر اجازه می دهد تا موقعیت و جهت اصلی یک تصویر را از طریق مثلث هوایی خودکار (AAT) و تنظیم بلوک بسته (BBA) محاسبه کند. این اجازه می دهد تا لایه DSM به عنوان یک نقطه ابری سه بعدی تولید شود که می توان از هر دو مجموعه داده به دست آورد (Wolf, 1985; Mikhail and Bethel, 2001). با فرافکنی و ترکیب تصاویر اصلی و لایه DSM، امکان تصحیح و موزاییک کردن تصاویر وجود دارد (Pix4D Manual, 2013). GTR Processor v2.92 امکان پردازش دیفرانسیل GNSS نقاط کنترل زمینی و نقاط بازرسی را فراهم می کند، در حالی که تجزیه و تحلیل آماری با استفاده از MATLAB v7.11 R2010b انجام شد.
3.4.2. Pix4D Mapper Pro
Pix4D Mapper Pro توسط Pix4D، یک شرکت سوئیسی در École Polytechnique Fédéralede Lozanne (EPFL) توسعه یافته است. این یک نرمافزار مبتنی بر دید است که به کاربران اجازه میدهد تنظیمات آن را تعریف کنند، از جمله انتخاب مراکز نمایش خود، موقعیتیابی دقت خود و انتخاب مدل دوربین خود. بسته به روشی که داده های موقعیت جغرافیایی برای هر تصویر ذخیره می شود، این امکان وجود دارد که نرم افزار به طور خودکار فرآیند را روی آن انجام دهد. اگر فایل در فرمت فایل تصویری تبادلی (EXIF) ذخیره شود، Pix4D Mapper Pro آن را برای BBA بارگیری میکند و همچنین دقت موقعیت تخمینی آن را ارزیابی میکند. اگرچه این فرآیند به طور کلی به صورت خودکار انجام می شود، کاربران می توانند گزینه هایی را برای کالیبراسیون SFM، BBA و دوربین تعریف کنند. این نرم افزار همچنین امکان تطبیق ویژگی با اپراتورهای SIFT را فراهم می کند، به این معنی که می توان نقاط اتصال را استخراج کرد. این نرم افزار در نهایت تمام پارامترهای تخمین زده شده و نتایج فرآیندهای تطبیق و جهت گیری را در پوشه خروجی ذخیره می کند و به راحتی قابل دسترسی است. تصاویر توسط تیم MARSRobotics® با استفاده از مجوز Pix4D پردازش شدند.
3.4.3. Ecognition
نرم افزار eCognition توسط Delphi2-Creative Technologies، یک شرکت آلمانی توسعه یافته است و روشی جدید برای تجزیه و تحلیل داده های شی گرا و تصاویر چند مقیاسی است. در این مطالعه از نسخه بتا این نرم افزار برای طبقه بندی مبتنی بر شی استفاده شد. وقتی به داده های شی گرا نگاه می کنیم، eCognition به این معنی است که کاربر می تواند به اطلاعاتی دسترسی پیدا کند که نمی تواند با پیکسل های منفرد به دست آورد. فرآیند تحلیل شامل دو مرحله تقسیم بندی و طبقه بندی بود. تقسیم بندی شامل گروه بندی عناصر خاص در یک تصویر بر اساس شباهت آنها است و باید قبل از اینکه نرم افزار بتواند اشیاء را طبقه بندی کند انجام شود زیرا نرم افزار با اشیا به جای پیکسل ها کار می کند [ 36 ].
3.4.4. نرم افزار ایستگاه کنترل زمینی جهانی (UGCS).
نرم افزارهای UGCS را می توان برای برنامه ریزی مسیر پرواز و مأموریت های بررسی هواپیماهای بدون سرنشین استفاده کرد. همچنین از نرم افزاری پشتیبانی می کند که سخت افزار پهپادها را از سازندگان مختلف کنترل می کند، بنابراین پهپاد را قادر می سازد از طریق سیستم های پخش مختلف کنترل شود. این نرم افزار می تواند مسیر را محاسبه کرده و پهپاد را به طور مستقل پرواز کند. همچنین، پارامترهای ورودی مناسب باید بر این اساس تنظیم شوند: مکان منطقه مورد نظر باید به خوبی بر روی نقشه مشخص شود، و ویژگی های پرواز (درصد همپوشانی تصویر سمت و جلو، ارتفاع پرواز) را نیز تنظیم کنید. این پارامترهای ورودی برای محاسبه مسیر پرواز بهینه استفاده می شود که پوشش کامل منطقه مورد نظر را تضمین می کند.
3.5. طراحی سیستم
3.5.1. ماموریت پرواز پهپاد
ماموریت های پروازی پهپاد با استفاده از نرم افزار UgCS طراحی شده است که امکان برنامه ریزی ماموریت ها را فراهم می کند و مسیر بر اساس پیکربندی دوربین انتخاب می شود. برای به دست آوردن یک نمای کلی از منطقه و تعیین مرزهای مسیر پرواز، از Google Earth استفاده شده است، اگرچه خطر یا مانعی را نشان نمی دهد، بنابراین نمی توان به تنهایی از آن استفاده کرد. به همین دلیل باید بررسی هایی انجام شود تا موانعی مانند درختان، ساختمان ها و دکل های برق شناسایی شوند. در حین بررسی پیش از پرواز، می توان یک فضای باز گسترده و مناسب برای برخاستن و فرود را نیز شناسایی کرد که آن را بسیار مهم می کند. در این مطالعه، این پرواز برای پوشش منطقه ای به مساحت 11 هکتار در ارتفاع متوسط 400 متر برنامه ریزی شده بود تا اطمینان حاصل شود که پهپاد می تواند فاصله نمونه زمینی 7 سانتی متری را به دست آورد. همپوشانی های رو به جلو 70 درصد و همپوشانی های جانبی 50 درصد تعیین شدند. این تنظیمات همپوشانی با استفاده از نرم افزار برنامه ریزی ماموریت (UgCS) انجام شد. مسیر پرواز کامپیوتری شد تا بتوان نتایج پرواز را تخمین زد، همانطور که در آن دیده می شودشکل 3 ، و تصمیم گرفته شد که از چرخش های بانکی تطبیقی استفاده شود و حداکثر سرعت 15 ms -1 باشد. سپس مسیر پرواز در پهپاد آپلود شد. اعتبار این تنظیمات پس از بررسی تصاویر خام در شکل 5 که مستقیماً از دوربین پهپاد قبل از پردازش گرفته شده بودند تأیید شد.

شکل 3 . برنامه ریزی پرواز توسط نرم افزار Mission Planner برای ماموریت MARSRobotics® Talon JUST انجام شد.

شکل 4 . محل GCP ها در محوطه دانشگاه JUST، 12 GCP (قرمز) از پیکربندی کنترل 12 GCP و از 14 CP (به رنگ سبز) در محل آزمون. شماره GCP برجسته 13 در پیکربندی کنترل RTK + 1 GCP استفاده میشود. توسط تیم MARSRobotics® با استفاده از مجوز Pix4D پردازش شده است.
3.5.2. ایجاد نقاط کنترل زمینی
در صورتی که پهپاد دارای GNSS دو فرکانس باشد، می توان از نیاز به نقاط کنترل زمینی اجتناب کرد، اما در این مطالعه، GNSS تنها تک فرکانس بود. در این مطالعه از GNSS استفاده نشد، در عوض از GCPها استفاده شد و باید قبل از پرواز در منطقه پروژه علامتگذاری میشد [ 37 ]. این منجر به این شد که 16 هدف علامت دار درست قبل از پرواز پهپاد مستقر و بررسی شدند. اینها باید مطابق با قوانین ساختمانها و پارکهای محلی باشد، و اگر مجاز بود، GCPها با استفاده از Trimble R8 GNSS بررسی میشدند. آنها دقت افقی 0.8 سانتی متر + 0.5 ppm و دقت عمودی 1.5 سانتی متر + 0.05 ppm را با استفاده از سیستم North® RTK متعلق به MARSRobotics به دست آوردند. این پروژه از یک تنظیم پیشفرض همانطور که سیستم North® RTK در هنگام جمعآوری نتایج پیشنهاد میکند، استفاده میکند. GCP های مورد استفاده در این پروژه را می توان در این قسمت مشاهده کردشکل 4 و به منظور اطمینان از بهترین نتایج Georeferencing انتخاب شدند. پنج نقطه مشخص شده با رنگ قرمز در شکل 4 به عنوان GCP و 11 نقطه زرد به عنوان نقاط بازرسی استفاده شد. ایستگاه پایه GPS با یک نقطه آبی مشخص شده است
3.5.3. توزیع RTK و GCP مبتنی بر پهپاد
پرواز در این مطالعه نه تنها دارای GCPهای توزیع شده خوبی است، همانطور که در شکل 5 مشاهده می شود ، بلکه با استفاده از گیرنده های 2 فرکانس فعال RTK-GNSS نیز انجام شد. این بدان معناست که دادههای RTK-GNSS متصل به هر تصویر با تصویر ترکیب شده است
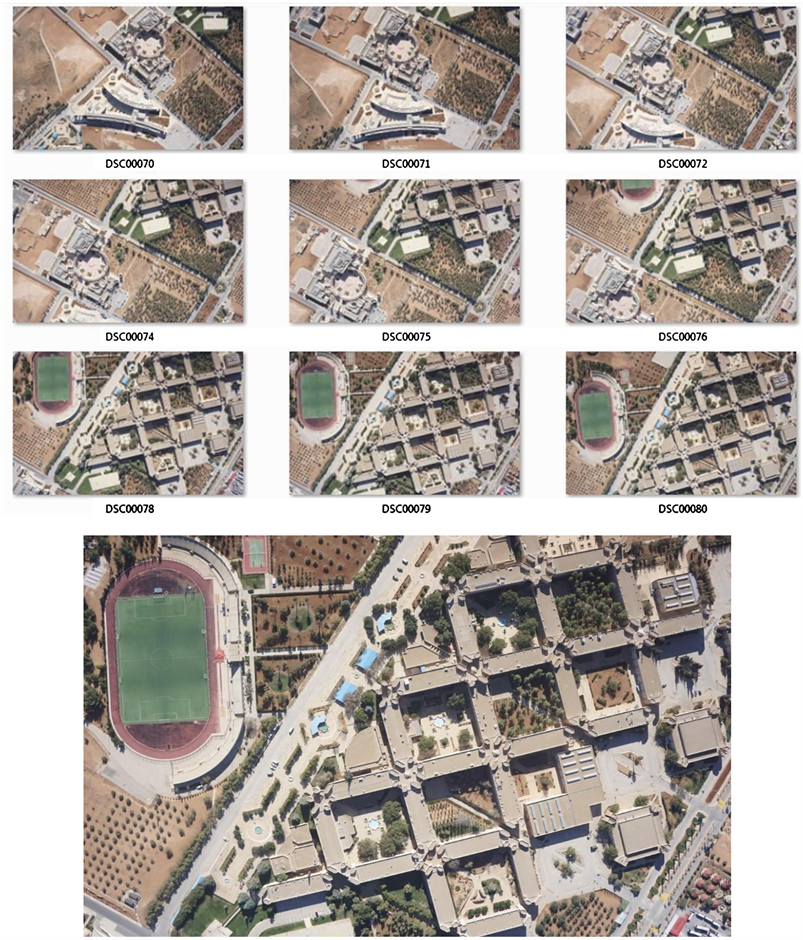
شکل 5 . تصویری از تصویر پهپاد گرفته شده با دوربین مرئی در 400 متری در محل آزمایش، تصویر زوم شده تصویر شماره DS00079 است که در وسط آخرین ردیف تصویر بالا ظاهر می شود (ارائه شده توسط تیم نقشه برداری هوایی MARSRobotics®) .
ورودی های یکسانی برای همه نسخه های پرواز استفاده شد و پرواز در حالت نیمه اتوماتیک با برنامه پرواز یکسان در هر بار عکس گرفتن بود. پهپاد در ارتفاع تقریبی 400 متری از سطح زمین پرواز کرد و پهپاد هم برای برخاستن و هم برای فرود در حالت دستی قرار گرفت. برای این مطالعه خاص، از حالت پرواز پنج نواری استفاده شد، به این معنی که 542 تصویر پس از پرواز 25 دقیقه ای جمع آوری شد و فاصله نمونه زمینی 7 سانتی متری را پوشش داد. برای به دست آوردن واضح ترین تصاویر، هنگام انتخاب زمان پرواز، آب و هوا و زمان روز در نظر گرفته شد. برخی از عکس های گرفته شده در شکل 5 قابل مشاهده است.
4. پردازش تصویر
4.1. موقعیت و جهت دوربین
نرم افزار انتخاب شده برای پردازش تصاویر این مطالعه Pix4D Mapper توسط Pix4D بود. در طول BBA، جهتگیری داخلی دوربین کالیبره شد، به این معنی که فاصله کانونی، موقعیت نقطه اصلی و پارامترهای اعوجاج لنز همگی خود تنظیم میشدند. امکان کالیبراسیون مجدد دوربین در میدان قبل از پرواز وجود نداشت، اما نشان داده شده است که زمانی که خود کالیبراسیون انجام شده است، این کار ضروری نیست. پس از تجزیه و تحلیل تصاویر توسط BBA، نقاط پیوند برای مطابقت دادن جفتهایی از تصاویر که از نظر مکانی مشابه هستند استفاده میشود. این اجازه می دهد تا مسیر پرواز دقیق دیده شود، زیرا نقاط اتصال ابر نقطه ای را در بالای تصویر ایجاد می کنند. این را می توان در شکل 6 مشاهده کرد، که موقعیت دوربین را هنگامی که پهپاد بر فراز Acadia A قرار داشت برجسته می کند. همچنین نقاطی را نشان می دهد که تصاویر نامناسب در پیش زمینه گرفته شده است.
نرم افزار انتخاب شده برای پردازش تصاویر این مطالعه Pix4D Mapper توسط Pix4D بود. در طول BBA، جهتگیری داخلی دوربین کالیبره شد، به این معنی که فاصله کانونی، موقعیت نقطه اصلی و پارامترهای اعوجاج لنز همگی خود تنظیم میشدند. امکان کالیبراسیون مجدد دوربین در میدان قبل از پرواز وجود نداشت، اما نشان داده شده است که زمانی که خود کالیبراسیون انجام شده است، این کار ضروری نیست. پس از تجزیه و تحلیل تصاویر توسط BBA، نقاط پیوند برای مطابقت دادن جفتهایی از تصاویر که از نظر مکانی مشابه هستند استفاده میشود. این اجازه می دهد تا مسیر پرواز دقیق دیده شود، زیرا نقاط اتصال ابر نقطه ای را در بالای تصویر ایجاد می کنند. این را می توان در شکل 6 مشاهده کرد، که موقعیت دوربین را هنگامی که پهپاد بر فراز Acadia A قرار داشت برجسته می کند. همچنین نقاطی را نشان می دهد که تصاویر نامناسب در پیش زمینه گرفته شده است.
4.2. لایههای DSM و موزاییکهای Orthoimage
نتایج فتوگرامتری مانند لایههای DSM و ارتوموزائیک از دادههای جمعآوریشده تولید شد. DSM یا مدلهای سطح دیجیتال نمایش سهبعدی یک منطقه را ارائه میدهند و ارتفاع را برجسته میکنند. این، در کنار ایجاد ابر نقطه و med، به سطح زمین اجازه می دهد تا به صورت دیجیتالی بازسازی شود. در این مورد، این کار با نرم افزار Pix4D انجام شد که داده های خارجی و ویژگی های کالیبراسیون دوربین را می گیرد و از آنها برای ایجاد یک صحنه دیجیتال با تطبیق تصویر استفاده می کند. این، همراه با ابرهای نقطه، به این معنی است که زمین را می توان توصیف کرد، و سپس برای ایجاد عکس های ارتوعکس و لایه های DSM، همانطور که در شکل 7 مشاهده می شود، مثلث بندی می شود .
شکل 6 . محل قرارگیری تصاویر از دو زاویه متفاوت. این توسط تیم MARSRobotics® با استفاده از Pix4D Mapper با استفاده از نمای سه بعدی در Pix4D Mapper ایجاد شده است. نمای ابر نقطه ای مساحت هر تصویری که در طول مسیر پرواز گرفته شده و زاویه هر کدام نسبت به زمین را نشان می دهد.
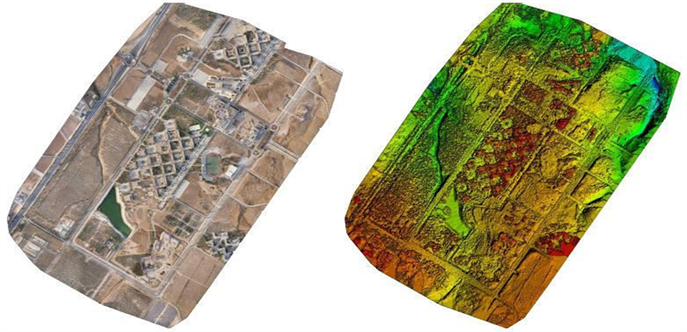
شکل 7 . Orthoimage (سمت چپ) و DSM (راست) از تصاویر پهپاد توسط سیستم MARSRobotics® ایجاد شده است.
4.3. دقت موقعیت جغرافیایی
با استفاده از سیستم قابل حمل North® GNSS-RTK و GCPهای بررسی شده توسط تیم MARSRobotics® در شکل 4 ، امکان انجام تجزیه و تحلیل آماری بر روی نتایج مطالعه وجود داشت. از 16 نقطه مشخص شده در شکل 5 ، 5 GCP و 11 ایست بازرسی انتخاب شدند که به ترتیب امکان تجزیه و تحلیل فرآیند جهت گیری بیرونی و ارزیابی دقت را فراهم می کند. نقاط به ArcGIS 10.3 وارد شدند و سیستم مختصات خروجی روی Mercator انتقال اردن (JTM projection) تنظیم شد. لایه پایه استفاده شده تصاویر ارتوموزائیک و همچنین DSM بود، به این معنی که دقت عمودی و افقی قابل ارزیابی است. سپس از Microsoft Excel برای محاسبه دقت نتایج استفاده شد. این را می توان در جدول 4 مشاهده کردو با وارد کردن Root Mean Square Error (RMSE) در Microsoft Excel انجام شد.
از جدول 4 مشاهده می شود که دقت عکس ارتوفوتو 8 سانتی متر شرقی، 7 سانتی متر شمالی و 20 سانتی متر از نظر ارتفاع است، یعنی حدود یک پیکسل در شرق و شمال و کمتر از 3 پیکسل در دقت ارتفاع، می تواند. همچنین مشاهده می شود که دلتای N باقیمانده برای نقطه شماره 9 به شدت با نقاط دیگر متفاوت است. این ممکن است به این دلیل باشد که نقطه یک نقطه پرت است یا ممکن است به دلیل خطا در اندازه گیری ها باشد. از این داده ها می توان نتیجه گرفت که موقعیت ارتوفوتو با انحراف استاندارد یک پیکسل -7 سانتی متر دقیق است –
8 سانتی متر افقی و 20 سانتی متر عمودی. از نظر رکوردهای فردی، می توان تشخیص داد که دقت مختصات Easting 13 از 16 نقاط کنترل زمینی و نقاط بررسی (81٪ از GCP ها و CkP ها) در یک پیکسل هستند، در حالی که دقت (100٪) از آنها در 2 پیکسل است. برای مختصات شمالی دقت 16 از 16 (100%) از نقاط کنترل زمینی و نقاط بررسی کمتر از دو پیکسل است.
5. تجزیه و تحلیل تصویر مبتنی بر شی
5.1. تقسیم بندی
منطقه تحت پوشش این مطالعه در شکل 7 قابل مشاهده است(آ). این یک منطقه پیچیده با اندازه 3350 × 4400 پیکسل و وضوح فضایی 0.07 متر است. هنگام انجام تجزیه و تحلیل تصویر شی گرا، بخش بندی داده ها ضروری است. این شامل تقسیم داده ها به دسته های مختلف است و مهم است که پارامترهایی که برای انجام این کار استفاده می شوند دقیق باشند تا از نتایج دقیق اطمینان حاصل شود. تقسیم بندی OBIA با استفاده از نرم افزار eCognition Developer 9 و بر اساس داده های RGB جمع آوری شده توسط دوربین انجام شد. در طی مراحل MRS، داده های قرمز، سبز و آبی از لایه DSM و داده های ارتوموزائیک وارد نرم افزار شد. این باعث شد که برخی از داده ها نادرست ظاهر شوند، زیرا به دلیل ویژگی های طیفی مشابه، تشخیص سقف ساختمان و زمین برای نرم افزار دشوار بود. برای رفع این مشکل، از کل لایه DSM استفاده شد و پس از چندین آزمایش، بهترین پارامترها برای تقسیم بندی توسط یک مقیاس تعیین شد. امتیاز اجسام 1319821، رنگ 0.8، شکل 0.2، فشردگی 0.5 و صافی 0.5 بود. به هر یک از این لایهها وزن یکسانی داده شد و به دلیل وضوح بالای دادهها، هر تصویر باید چندین بار قطعهبندی میشد تا تصویری دقیق به دست آید.شکل 8 .
5.2. طبقه بندی اشیاء تصویری
پس از انجام تقسیم بندی، یک طبقه بندی شی تصویر اجرا شد. این همچنین با استفاده از eCognition انجام شد که به کاربران امکان انتخاب بین طبقهبندی فازی بر اساس توابع عضویت تعریفشده توسط کاربر و طبقهبندی نزدیکترین همسایه فازی را میدهد. در این مطالعه طبقه بندی نزدیکترین همسایه بود
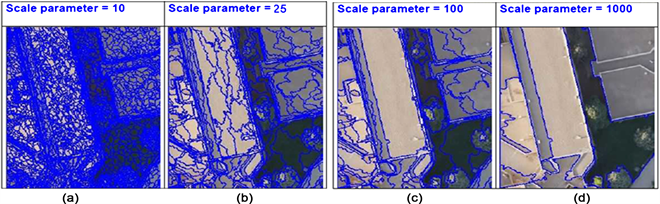
شکل 8 . بخش بندی چند وضوحی با پارامترهای مقیاس 10 (a)، 25 (b)، 100 (c) و 1000 (d) با استفاده از تصاویر Orthomosaic نتایج حاصل می شود.
استفاده شد و نمونه ها برای هر کلاس مختلف انتخاب شدند. این یک طبقهبندی کارآمدتر بود، زیرا از اتوماسیون استفاده میکند و در یک فضای ویژگی عمل میکند که میتواند خودکار یا کاربر کنترل شود. نمونهها برای ارائه تصویری نماینده از مجموعه دادهها به عنوان یک کل انتخاب شدند و 11 طبقه پوشش زمین در منطقه مورد استفاده در این مطالعه شناسایی شدند. اینها با قوانین کلاس بر اساس شکل، امضاهای طیفی، مکان و روابط بین اشیاء تعریف شدند و برای طبقه بندی تصاویر به محتمل ترین دسته ها و همچنین طبقه بندی DSM استفاده شدند. نتایج نرم افزار ArcGIS 10.3 در شکل 9 قابل مشاهده است.
به منظور اطمینان از اینکه داده های دقیق از این مطالعه به دست آمده است، داده ها با نمونه های آزمایشی از کلاس های مختلف مقایسه شد. به طور کلی نتایج مشابه نمونه های آزمایشی بود (به ترتیب برابر با 94/0، 95/0 و 92/0 برای فاکتورهای مقیاس 10، 40 و 80). این نشان میدهد که با افزایش ضریب مقیاس، دقت کاهش مییابد، به این معنی که هم تکنیک تقسیمبندی چند وضوحی و هم طبقهبندی شیگرا برای درک تصاویر سنجش از دور مهم هستند. SNN مورد استفاده در اینجا نیز به دانش خاصی در مورد بررسی شده نیاز دارد

شکل 9 . نتایج طبقهبندی با روش طبقهبندیکننده نزدیکترین همسایه فازی برای تقسیمبندی با ضریب مقیاس 25 اعمال شد.
منطقه و انتخاب خوبی از داده ها به منظور اطمینان از نتایج خوب. این امکان وجود دارد که نتایج این مطالعه با استفاده از حسگرهای جدید حتی بیشتر بهبود یابد.
5.3. ارزیابی دقت طبقه بندی
با استفاده از ماتریس های سردرگمی، ارزیابی های دقت برای طبقه بندی تصویر شی گرا انجام شد. دقت با استفاده از دادههای قبلی که در منطقه مورد مطالعه با استفاده از دادههای صحرایی و عکسبرداری هوایی جمعآوری شده بود، ارزیابی شد. اندازه گیری برای دقت طبقه بندی کلی با شمارش و تقسیم تعداد پیکسل ها به طور صحیح بر تعداد کل پیکسل ها بیان می شود. به صورت زیر بیان می شود:
دقت کلی =∑راپمن جن،overall accuracy=∑PijN,(1)
جایی که: ∑راپمن ج∑Pij– تعداد کل پیکسل های طبقه بندی شده به درستی.
N-تعداد کل پیکسل ها در ماتریس سردرگمی.
دقت سازنده یک دقت مرجع است که با بررسی پیشبینیهای تولید شده برای یک کلاس محاسبه میشود و با تشکیل درصد پیشبینیهای دقیق، به صورت زیر بیان میشود:
صحت تولید کننده =پمن جآرمنمن،the producer’saccuracy=PijRiI,(2)
جایی که: پمن جPij– تعداد پیکسل های طبقه بندی شده مناسب در ردیف i (در سلول مورب).
ری – تعداد کل پیکسل ها در ردیف i.
دقت کاربر یک دقت مبتنی بر نقشه است که با بررسی داده های مرجع برای یک کلاس و تعیین درصد پیش بینی صحیح برای این نمونه ها محاسبه می شود. به صورت زیر بیان می شود:
صحت کاربران = _پمن جسیj،the users’saccuracy=PijCj,(3)
جایی که: P ij – تعداد پیکسل های طبقه بندی شده مناسب در ستون j (در سلول مورب)، سیjCj– تعداد کل پیکسل ها در ستون j.
نتایج ماتریس های سردرگمی برای طبقه بندی تصاویر شی گرا را می توان در جدول 5 مشاهده کرد. با نگاهی به این جدول، صحت کلی طبقه بندی شی گرا 84.37 درصد و نمره کاپا کلی 0.74 بود. همچنین می توان مشاهده کرد که برخی از کلاس ها مانند سایه، پارکینگ و روسازی های بتنی از دقت پایین تری برخوردار بودند، در حالی که دریاچه ها و پنل های خورشیدی به طور قابل توجهی سطوح بالاتری داشتند.
6. نتیجه گیری
از این مطالعه می توان دریافت که تفکیک فضایی تصوير ارتومی نقش بسزایی در دقت طبقه بندی داده ها دارد. هدف این ماموریت پرواز جمعآوری تصاویر با وضوح فضایی بسیار بالا است، زیرا این تصاویر معمولاً برای تمایز بین ساختمانها و عناصر فرعی مانند پارکینگ و پوشش گیاهی بهتر هستند. این کار با ایجاد موزاییک Orthoimages و
لایه های DSM بیش از 400 تصویر از منطقه مورد مطالعه گرفته شد و وضوح فضایی آنها 7 سانتی متر بود. این پهپادها در حین پرواز توسط پهپاد دارای قابلیت RTK جمع آوری شدند. از نظر دقت و تکرارپذیری، سطوح بالا به نظر می رسند زیرا می توان آنها را با تجزیه و تحلیل انجام شده با استفاده از نرم افزار Pix4D مشاهده کرد. GNSS-AT میانگین RMSE افقی 2.2 سانتی متر را تعیین می کند، در حالی که در ارتفاع، این RMSE به 5.5 سانتی متر افزایش می یابد. با وجود این، نتایج از ادعاهای سازنده پیروی می کند و نشان می دهد که بررسی های فتوگرامتری می توانند برای ایجاد یک سیستم مرجع پایدار به RTK/PPK GNSS روی برد تکیه کنند.
این یافتهها همچنین اثربخشی تقسیمبندی چند وضوح شی گرا را هنگام استفاده بر روی لایههای DSM و تصاویر با وضوح بالا نشان داد. با استفاده از طبقهبندیکننده نزدیکترین همسایه فازی، کلاسها بر اساس امضاهای طیفی، شکل، مکان و رابطه ایجاد شدند و برای هر شی اعمال شدند. این دادهها نسبتاً دقیق بودند، با طبقهبندی شیگرا 84.37٪ و امتیاز کاپا کلی 0.74.


بدون دیدگاه