

اتوماسیون استخراج سطوح پلنر زمینه اصلی تحقیق در فتوگرامتری دیجیتال است. این سطوح برای تولید پایگاه داده های سه بعدی GIS ضروری هستند. سطوح معمولاً از روی DEM یا تصاویر تعیین می شوند. هر مجموعه داده نوع متفاوتی از اطلاعات را ارائه می دهد. بنابراین، ترکیب دو مجموعه داده باید روند بازسازی سطح را افزایش دهد. این مقاله یک تکنیک جدید برای تولید سطوح سه بعدی با ترکیب DEM های مبتنی بر همبستگی و تصاویر هوایی ارائه می دهد. این فرآیند با تمایز نقاط DEM شروع می شود که سطوح برنامه ریز را با استفاده از آمار محلی ارتفاعات و شدت و ارتفاعات همسایه نشان می دهد. سپس از یک ارتوفوتو قطعهبندی شده برای گروهبندی این نقاط در مناطق مختلف استفاده میشود. ارتفاع نقاط در هر منطقه به مدل تنظیم حداقل مربعات برای محاسبه بهترین پارامترهای سطح برنامه ریز تغذیه می شود. سپس اصلاح مرزهای سطحی با استفاده از الگوریتم رشد منطقه انجام می شود. RMSE برای پنج سایت آزمایش دقت فضایی 5 – 8 سانتی متر را نشان داد.
کلید واژه ها
فتوگرامتری ، DEM ، ارتفتو ، سطوح پلنر
1. مقدمه
سطوح سه بعدی از تعداد زیادی کاربرد از جمله: مدل سازی شهر، تولید سیستم های اطلاعات جغرافیایی سه بعدی (GIS) و تحلیل توپوگرافی. از این رو، تقاضای فزاینده ای برای تولید خودکار سطوح سه بعدی وجود دارد. با این حال، محصولات نهایی ایستگاههای فتوگرامتری دیجیتال فعلی معمولاً مدلهای ارتفاعی دیجیتال (DEMs) هستند. این مدل ها نمایش دیجیتالی از ارتفاعات زمین نمونه برداری شده در یک فاصله شبکه ثابت بر روی سطح زمین هستند. بنابراین، خروجی معمولاً 2.5D نامیده می شود. فاصله بین نقاط شبکه یک جنبه مهم است که بر کاربر چنین مدلی تأثیر می گذارد. اتوماسیون بازسازی سطح جسم از تصاویر دیجیتال در حال حاضر یکی از مهمترین زمینه های تحقیقاتی در فتوگرامتری است [ 1 ]] . بازسازی سطوح دقیق از مجموعه داده های تصویری یک مشکل بسیار سخت است که به طور کامل حل نشده و در صورت داده های ناقص، پر سر و صدا و پراکنده مشکل ساز است [ 2 ]. در سال های گذشته راه حل های مختلفی برای مدل سازی سه بعدی توسعه داده شده است.
برخی از محققان بر روی استخراج هواپیماهای چوبی از مجموعه داده LIDAR کار کردند. یک ابر نقطه LIDAR چند مقیاسی از الگوریتم تجزیه برای حذف نقاط زمین و بعداً تشکیل سطوح صاف کننده از طریق روشهای برازش محلی در [ 3 ] استفاده میکند. در [ 4 ]، مدل انرژی گیبس از اشیاء ساختمانی ابتدا برای تناسب با نقاط ساختمان تعریف شده و سپس برای خلاص شدن از شر نقاط پرت و برای تعریف خطوط کلی ساختمان، اصلاح شده است. در [ 5 ]، یک تجزیه و تحلیل مؤلفه اصلی برای همسایگی محلی نقاط منفرد انجام میشود تا نقاط متعلق به اجسام مسطح را شناسایی کند و سپس این نقاط را بر اساس تعریف همسایگی استوانهای تطبیقی تقسیمبندی کند. یک الگوریتم خوشه بندی نقطه ای برای استخراج بخش های همگن در داده های لیزری در [ 6 ] ارائه شده است.] . هدف از خوشهبندی دادهها تقسیم دادهها به مناطق مجزا است که هر کدام دارای ویژگی همگنی هستند که آن را از مناطق اطرافش متمایز میکند. گردش کار در [ 7 ] شامل چهار مرحله اصلی است: تقسیم مجموعه داده به کاشی های همپوشانی، شناسایی مناطق ساختمانی در هر عنوان، ادغام مناطق همپوشانی در کاشی های مجاور، و در نهایت سطوح سه بعدی استخراج می شوند. اکثر این مطالعات از مجموعه داده های LIDAR استفاده می کنند که در ارائه بافت یا اطلاعات طیفی ناکام هستند.
محققان دیگر هم از تصاویر هوایی و هم از ابر نقطه ای LIDAR برای همین هدف استفاده کردند. به عنوان مثال، الگوریتمی برای ترسیم تکههای سقف از ابر نقطه LIDAR و عکسهای اصلاحشده در [ 8 ] ارائه شده است. بدوی هندسی در [ 9 ] برای مدلسازی سقفهای ساختمان استفاده میشود و سپس یک تابع هزینه با استفاده از محدودیتهای تصاویر هوایی و دادههای LIDAR ساخته میشود. مطالعات دیگر با استفاده از LIDAR و تصاویر هوایی شامل کار انجام شده در [ 10 ] است که در آن نقاط روی تکههای سقف ابتدا از نقطه LIDAR شناسایی میشوند و لبههای ساختمان از تصاویر نوری استخراج میشوند. یک سیستم مدلسازی ترکیبی که دادههای LIDAR، تصاویر هوایی و عکسهای زمینی را ترکیب میکند در [ 11 ] ارائه شده است.] . این مدل از سه مرحله تشکیل شده است. در مرحله اول، خطوط کلی سطح از یک تصویر هوایی با وضوح بالا به صورت تعاملی استخراج میشوند، سپس با استفاده از یک مدل تبدیل شش پارامتری به دادههای LIDAR نگاشت میشوند. سپس دو مجموعه داده برای بازسازی کامل مدل ترکیب می شوند. در مرحله سوم، ژستها بهطور خودکار از تصاویر نمای زمین بازیابی میشوند و بافتها تولید میشوند و به مدلهای اصلاحشده نگاشت میشوند. این مطالعات LIDAR را با تصاویر ترکیب میکنند که گرانتر از مجموعه دادههای تصویری هستند.
در حالی که اسکنرهای لیزری به دلیل اندازه و هزینه خود چندین چالش را ایجاد می کنند [ 12 ]، تصاویر نوری ابزار مقرون به صرفه و مقرون به صرفه ای برای ایجاد DEM های با کیفیت بالا و قابل اعتماد ارائه می دهند، [ 13 ]. بنابراین، در این مقاله ما بر عکس های هوایی به عنوان منبع صرف داده خود تکیه می کنیم. مطالعات مرتبط شامل یک الگوریتم تطبیق استریو برای بازسازی سطح شیء، [ 14] . الگوریتم مبتنی بر ادغام چندین تکنیک تطبیق استریو است. مشکل تطبیق با ادغام هر دو رویکرد مبتنی بر سیگنال و ویژگی مورد بررسی قرار گرفت. یک ویژگی جدید برای تطبیق سطح، یعنی ویژگی پلاتو، در فرآیند تطبیق اضافه شد. ویژگی فلات به عنوان یک منطقه 1 بعدی با مقیاس خاکستری تقریبا ثابت تعریف شد. سپس از برنامه نویسی پویا برای حل مشکل تطبیق استفاده شد. این تحقیق فقط DEM را در حالت خط به خط تنظیم می کند و رابطه بین خط بین خطوط مختلف را در نظر نمی گیرد. مطالعه دیگری برای استخراج چندضلعی فضایی سه بعدی نیمه خودکار از یک جفت تصویر هوایی رنگی در [ 15 ] ارائه شده است.] . الگوریتم از چندین مرحله متوالی تشکیل شده است. اشاره اولیه توسط یک اپراتور انسانی، استخراج یک چند ضلعی محدود در فضای تصویر سمت چپ، تخمین ارتفاع متوسط، تبدیل به فضای تصویر سمت راست، استخراج یک چند ضلعی مرزی در فضای تصویر سمت راست. در نهایت، یک فرآیند تکراری که هم چند ضلعی ها را مطابقت می دهد و هم چند ضلعی فضایی را استخراج می کند، انجام می شود. این روش متکی به یک جفت تصویر است که ممکن است به دلیل قسمتهای پنهان، کل زمین را نشان ندهند. الگوریتم دیگری برای بازسازی سطح برنامه ریز از DEM ها در [ 16 ] برجسته شده است] . الگوریتم از سه مرحله تشکیل شده است. در مرحله اول، یک فرآیند تقسیم بندی به منظور به دست آوردن اولیه سطح برنامه ریز از DEM ها استفاده می شود. در مرحله دوم، یک رویکرد مبتنی بر قانون تصمیم میگیرد که کدام بخشها را میتوان با مجموعهای از مدلهای سطح برنامهریز از پیش تعریفشده توضیح داد. در نهایت، سطوح با بستن هر شکافی که در اثر حذف مناطق غیرقابل توضیح ایجاد شده است، مشخص میشوند. این روش فقط از DEM استفاده می کند و داده های تصویر را در اصلاح در نظر نمی گیرد. استفاده از DEM ها صرفاً به منبع DEM و کیفیت آنها بستگی دارد. بر خلاف روش ارائه شده که هم از تصویر و هم از DEM بهره می برد و می تواند برای هر DEM اعمال شود و می تواند به سایر منابع داده نوری مانند تصاویر ماهواره ای گسترش یابد.
2. روش شناسی
روش پیشنهادی شامل مراحل زیر می باشد. ابتدا یک ارتفتو تولید می شود. در مرحله بعد، نقاطی که سطوح برنامهریز را نشان میدهند، با استفاده از سه معیار از DEM و ارتفتو جدا میشوند. این معیارها شامل دو اندازه گیری محلی برای احتمال یک نقطه به عنوان یک نقطه سطح برنامه ریز است. ارتفاعات نقطه نیز در فرآیند تبعیض به کار گرفته می شود. سپس نواحی تصویر با استفاده از تکنیک تقسیم و ادغام تصویر از ارتوفتو استخراج میشوند. سپس یک مدل تعدیل حداقل مربعات، [ 17 ] برای یافتن بهترین سطح برنامه ریز برای هر منطقه با استفاده از نقاط کمک کننده اعمال می شود. سپس مرزهای هر سطح مشخص می شود.
2.1. نسل اورتوفوتو
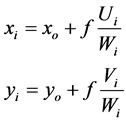
تصاویر هوایی مورد استفاده در این تحقیق کاملاً مثلثی بوده یعنی عناصر جهت گیری داخلی و خارجی با استفاده از نرم افزار فتوگرامتری تعریف شده است. تصاویر، عکس های عمودی معمولی در مقیاس 1:4000 هستند که در 30 میلی متر اسکن شده اند. علاوه بر این، DEM استفاده شده با استفاده از نرم افزار قبلی تولید می شود. از این رو، مختصات فضای زمین برای هر نقطه DEM مشخص است. برای هر نقطه DEM، معادلات هم خطی، معادله (1)، [ 18 ]، برای محاسبه پیکسل تصویر مربوطه استفاده می شود. یک مقدار خاکستری درون یابی شده با استفاده از درون یابی دوخطی محاسبه می شود و برای تولید عکس ارتو استفاده می شود.
 (1)
(1)
که در آن: x o , y o , و f پارامترهای داخلی دوربین هستند، x i و y i مختصات پیکسل مربوطه نقطه (i) هستند 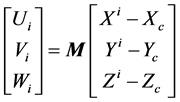 ، که
، که  در آن
در آن
ماتریس چرخش برای تصویر، Xc ، Yc ، و Zc : مختصات ایستگاه نوردهی برای تصویر، و (Xi ، Yi ، و Zi ) مختصات فضای جسم نقطه (i) هستند .
2.2. نقاط سطحی برنامه ریز متمایز
نقاط سطح پلنر دارای چندین ویژگی هستند که می توان از آنها برای تمایز آنها از نقاط دیگر استفاده کرد. در این تحقیق از سه ویژگی اصلی استفاده شده است. این ویژگی ها عبارتند از؛ معیاری برای کیفیت برازش صفحه محلی، همگنی سطوح خاکستری برای نقاط اطراف، ارتفاع نقطه. هر مشخصه می تواند به عنوان یک معیار در تشخیص نقاط سطح برنامه ریز مورد استفاده قرار گیرد. با این حال، ترکیب این سه معیار باید به تشخیص بهتر نقاط سطح برنامه ریز منجر شود.
2.2.1. معیار برنامه ریز محلی
این اندازه گیری با استفاده از مدل تنظیم حداقل مربعات برای یک پنجره محلی 3×3 محاسبه می شود. ورودی مدل حداقل مربعات ارتفاعات برای یک نقطه DEM و هشت نقطه اطراف در پنجره است. معادله (2) مدل تعدیل حداقل مربعات بکار گرفته شده را نشان می دهد. خروجی مدل سه پارامتر است که صفحه محلی را نشان می دهد که با پنجره محلی مطابقت دارد. یک سیستم مختصات افقی محلی در هر پنجره و در مرکز نقطه مرکزی پنجره استفاده می شود. برای یافتن a، b و c، از اصول regres استفاده می کنیم.
sion میخواهیم a، b و c را پیدا کنیم که 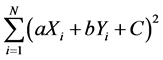 حداقل باشد.
حداقل باشد.
بنابراین مشتق جزئی را نسبت به a می گیریم و آن را برابر صفر می کنیم و برای b و c نیز همین کار را می کنیم. از این رو، پارامترهای مجهول به طور مستقیم همانطور که در رابطه (3) نشان داده شده است، محاسبه می شوند. سپس از پارامترها برای محاسبه ارتفاع تنظیم شده برای هر نقطه در پنجره استفاده می شود. شکل 1 پنجره محلی پیشنهادی و ارتفاع نقاط قبل و بعد از فرآیند اتصال را نشان می دهد.

شکل 1 . ارتفاع نقاط DEM در یک پنجره محلی قبل و بعد از اتصال.
 (2)
(2)
جایی که:
l i ارتفاع اندازه گیری شده برای نقطه (i) است،
v i باقیمانده ارتفاع اندازه گیری شده برای نقطه (i) است.
X i و Y i مختصات پایه X و Y برای نقطه (i) هستند،
a، b و c پارامترهای صفحه محلی هستند و
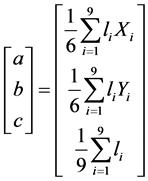 (3)
(3)
جایی که:
a، b و c سه پارامتری هستند که سطح برنامه ریز را نشان می دهند.
l i ارتفاع نقطه (i) است که از DEM اندازه گیری می شود و
X i و Y i مختصات نقطه (i) پنجره محلی هستند.
سپس بردار باقیمانده (V) محاسبه می شود و سپس مقدار (V T V) برای هر پنجره محاسبه می شود. این کمیت به عنوان معیاری برای کیفیت برازش استفاده می شود. مقادیر کوچکتر نشان می دهد که نقطه DEM متعلق به یک سطح برنامه ریز است. مقادیر بزرگ به این معنی است که نقطه DEM در سطح برنامه ریز مناسب نیست. شکل 2 (الف) کمیت محاسبه شده را برای منطقه آزمایش 1 نشان می دهد . مناطق تاریک نشان دهنده مقادیر زیاد هستند، در حالی که مناطق روشن نشان دهنده مقادیر کم هستند.
2.2.2. معیار شدت تصویر
پیکسل هایی که سطوح برنامه ریز را نشان می دهند باید شدت های مشابهی داشته باشند. تنوع سطوح خاکستری در مجاورت چنین پیکسل هایی باید کم باشد. برای هر پیکسل در ارتفتو تولید شده یک پنجره محلی ایجاد می شود. اندازه پنجره محلی 3 × 3 است. برای هر پیکسل، انحراف استاندارد سطوح خاکستری در پنجره محلی محاسبه می شود. انحراف استاندارد سطوح خاکستری به عنوان استفاده می شود

 (الف) (ب)
(الف) (ب)
شکل 2 . معیارهای 1 و 2 اندازه گیری شده برای مکان آزمایش 1( مقادیر بالاتر تیره تر هستند). (الف) معیار اول ، (ب) معیار دوم .
معیار دیگری در فرآیند تشخیص نقاط سطح برنامه ریز. شکل 2 (ب) انحراف معیار محاسبه شده سطوح خاکستری را در ارتوفوتو برای منطقه آزمایش 1 نشان می دهد.
2.2.3. معیار قد
سطوح برنامه ریز معمولاً ویژگی های ساخته شده توسط انسان را توصیف می کنند. این سطوح تمایل دارند بالاتر از زمین های خالی قرار بگیرند. با این حال، DEM ها ارتفاع سطوح زمین را اندازه گیری می کنند. ترکیب DEM و DSM باید به اطلاعاتی در مورد نقاط مرتفع منجر شود. از این رو، استخراج DSM ضروری است. حداقل فیلترها معمولاً در این کار استفاده می شوند، [ 19 ] و [ 20] . هدف اصلی چنین فرآیند فیلترینگ شناسایی و در نتیجه حذف نقاط بالای سطح زمین به منظور تشخیص ارتفاع نقاط DSM در مجموعه داده است. حداقل اندازه فیلتر باید به اندازه کافی بزرگ باشد تا نقاط داده ای که بخشی از نویز نیستند را شامل شود. با این حال، روشهای تکراری میتوانند برای جلوگیری از تأثیر نویز استفاده شوند. در این تحقیق، اندازه حداقل پنجره فیلتر 3×3 است. فیلتر کردن به صورت مکرر تکرار می شود تا زمانی که DSM استخراج شود. شکل 3 دو نمای پرسپکتیو از 1 را نشان می دهدسایت تست نمای اول نمایانگر DEM اصلی است، در حالی که نمای دوم نمایانگر DSM استخراج شده است. در این سایت تست حداکثر ارتفاع در DEM 227 متر است در حالی که حداکثر ارتفاع در DSM 206 متر است. حداقل ارتفاع در هر دو مدل 195.6 متر است. نتایج نشان می دهد که حتی زمانی که زمین خالی صاف نیست، فرآیند فیلتر کردن قادر به استخراج DSM است.
2.3. استخراج مناطق تصویر
چندین تکنیک تقسیمبندی تصویر در ادبیات وجود دارد که میتوان از آنها برای استخراج مناطق تصویر استفاده کرد. اگر شدت نواحی تصویر تقریباً یکسان باشد، این تکنیکها نتایج خوبی را نشان میدهند. علاوه بر این، کنتراست بالایی بین منطقه و اشیاء اطراف باید وجود داشته باشد. تکنیک تقسیم و ادغام تصویر [ 21 ] نتایج خوبی را با چنین موقعیتی نشان داد. در این تحقیق از تکنیک تقسیم و ادغام تصویر استفاده شده است.
تقسیم بندی و ادغام تصویر به شرح زیر است: اول، تقسیم تصویر. تصویر به صورت بازگشتی به مناطق کوچکتر تقسیم می شود تا زمانی که شرایط همگنی برآورده شود. این کار با استفاده از نمایش چهار درختی انجام می شود. سپس مناطق مجاور با هم ادغام می شوند تا مناطق بزرگ تری بر اساس معیار قبلی تشکیل دهند. در مرحله آخر، مناطق کوچک یا حذف می شوند یا با مناطق بزرگتر ادغام می شوند. معیاری که در روش تقسیم و ادغام تصویر استفاده می شود این است که اختلاف بین شدت حداقل و حداکثر کمتر از یک آستانه معین باشد. سپس حفره ها به طور خودکار با استفاده از الگوریتم رشد منطقه [ 22 ] شناسایی می شوند. بر اساس شدت متوسط سوراخ ها، یا حذف می شوند یا با مناطق اطراف ادغام می شوند. شکل 4تصویر ارتوفتو را قبل و بعد از فرآیند تقسیم بندی برای اولین محل آزمایش نشان می دهد.
2.4. استخراج سطوح Planner
هر یک از نتایج فرآیندهای قبلی می تواند به صورت جداگانه برای تشخیص نقاط سطح برنامه ریز مورد استفاده قرار گیرد. با این حال، ترکیب قبلی

شکل 3 . DEM و DSM برای محل آزمایش 1 ( واحدها بر حسب متر).


شکل 4 . Orthophoto اصلی و قطعه بندی شده برای اولین سایت تست.
معیارها در فرآیند تمایز باید منجر به توصیف با کیفیت بالاتر سطوح برنامه ریز شود. ادبیات تعدادی از تکنیک ها را برای ترکیب چنین اطلاعاتی توصیف می کند. یک طبقه بندی مبتنی بر شی به جای طبقه بندی مبتنی بر پیکسل در [ 23 ] استفاده می شود. یک طبقه بندی مبتنی بر دانش با در نظر گرفتن اطلاعات ارتفاع، طیفی، بافت و شکل در [ 24 ] استفاده شده است.
در این تحقیق از یک الگوریتم مبتنی بر قانون برای تشخیص نقاط سطح برنامه ریز استفاده شده است. الگوریتم با عادی سازی خروجی سه معیار محاسبه شده شروع می شود. برای معیار اول و دوم، تفاوت بین مقادیر حداکثر و حداقل محاسبه می شود. سپس برای هر معیار یک مقدار نرمال شده با استفاده از رابطه (4) محاسبه می شود. هرچه مقدار در هر خروجی نرمال شده بزرگتر باشد، به احتمال زیاد نقطه به سطح برنامه ریز تعلق خواهد داشت. در مرحله بعد، تفاوت بین DEM و DSM محاسبه می شود. سپس از معادله (3) برای عادی سازی تفاوت بین دو مدل استفاده می شود.
 (4)
(4)
جایی که:
 مقدار نرمال شده برای نقطه (i) است،
مقدار نرمال شده برای نقطه (i) است،
 مقدار اصلی نقطه (i) و
مقدار اصلی نقطه (i) و
d تفاوت بین مقادیر حداکثر و حداقل خروجی است.
سه مقدار نرمال شده و تصویر قطعه بندی شده برای تشخیص نقاط سطح برنامه ریز به شرح زیر استفاده می شود. ابتدا میانگین سه خروجی نرمال شده برای هر نقطه محاسبه می شود. اگر میانگین بزرگتر از 0.75 باشد و مقدار هر مقدار نرمال شده برای آن نقطه بیشتر از 0.9 باشد، نقطه به عنوان نقطه سطح برنامه ریز تشخیص داده می شود. نویز و نواحی کوچک با استفاده از فرآیند رشد منطقه حذف می شوند. نقاط سطح برنامه ریز مجاور به هم متصل می شوند و اگر اندازه منطقه کوچکتر از آستانه معین باشد، منطقه حذف می شود. در این تحقیق از آستانه 10 تا 25 امتیاز استفاده شده است. نتیجه برای اولین منطقه آزمایش در شکل 5 نشان داده شده است .
برای هر منطقه در ارتفتو مبتنی بر منطقه، نقاط سطح برنامه ریز مربوطه آن شمارش می شود. اگر تعداد این نقاط بیش از 90 درصد باشد، تصور می شود که این منطقه یک سطح برنامه ریز است. سایر مناطق حذف می شوند. ارتفاع نقاط متعلق به یک منطقه سطح برنامه ریز در تنظیم حداقل مربعات استفاده می شود. در مدل تعدیل، از ارتفاعات تمام نقاط منطقه به عنوان مشاهدات استفاده می شود. ناشناخته ها پارامترهای سطح هستند. از آنجایی که فقط سطوح برنامه ریز در نظر گرفته می شوند، تنها از سه پارامتر برای هر منطقه استفاده می شود. معادله (5) مدل تعدیل حداقل مربعات بکار گرفته شده برای محاسبه پارامترهای صفحه را نشان می دهد. سپس از این پارامترها برای محاسبه ارتفاعات تنظیم شده هر نقطه در DEM که به سطح برنامه ریز تعلق دارد استفاده می شود.
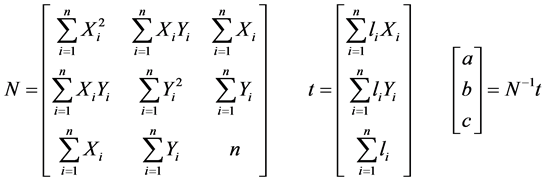 (5)
(5)

شکل 5 . نقاط به عنوان نقاط سطح برنامه ریز شناسایی شدند.
جایی که:
a، b و c سه پارامتری هستند که سطح برنامه ریز را نشان می دهند.
l i ارتفاع نقطه (i) است،
X i و Y i مختصات نقطه (i) و
n تعداد نقاط در ناحیه سطح برنامه ریز است.
به منظور ترسیم نقاط مرزی برای هر منطقه، مرحله پالایش اجرا می شود. برای هر منطقه، نقاط همسایه برای هر نقطه مرزی قرار دارد. هر نقطه همسایه ای که به منطقه تعلق ندارد مورد آزمایش قرار می گیرد که آیا می توان آن را به منطقه الحاق کرد. این آزمون بر اساس تفاوت بین ارتفاع نقطه و ارتفاع مورد انتظار با استفاده از سه پارامتر سطح برنامه ریز منطقه است. اگر نقطه به منطقه اضافه شود، پارامترها دوباره محاسبه و به روز می شوند. علاوه بر این، ارتفاعات نقاط منطقه، از جمله نقاط الحاقی، مجددا محاسبه می شود. این فرآیند به طور مکرر تکرار می شود تا زمانی که هیچ نقطه همسایه دیگری اضافه نشود. شکل 6 سطوح برنامه ریز استخراج شده نهایی را برای اولین محل آزمایش نشان می دهد.
3. نتایج تجربی و تجزیه و تحلیل
برای آزمایش و تأیید الگوریتم پیشنهادی، یک برنامه ++C با استفاده از Microsoft Visual Studio 6.0 توسعه داده شد. DEM های استفاده شده با فاصله یک متری تولید می شوند. پنج سایت تست برای آزمایش الگوریتم پیشنهادی استفاده می شود. شکل 7 سطوح برنامه ریز استخراج شده را برای چهار محل آزمایش reaming نشان می دهد. نتایج به صورت بصری و عددی ارزیابی می شوند. ارزیابی بصری نشان می دهد که طرح

شکل 6 . سطوح Planner استخراج شده برای سایت آزمایش 1 .
 سایت آزمون 2 سایت آزمون
سایت آزمون 2 سایت آزمون 3 سایت آزمون
3 سایت آزمون 4 سایت آزمون
4 سایت آزمون 5 سایت آزمون
5 سایت آزمون
شکل 7 . سطوح Planner استخراج شده برای 4 سایت تست.
سطوح ner در همه سایت های آزمایش تشخیص داده می شود. علاوه بر این، هیچ سطوح کاذب استخراج نشد. با این حال، برای برخی از سطوح، مرزها به خوبی مشخص نشده اند. این فرآیند تحت تأثیر نقاط دورافتاده یا گمشده در مناطق استخراج شده است. این به دلیل حساسیت فرآیند تقسیم بندی است. علاوه بر این، نویز در مجاورت ناپیوستگی های ارتفاعی نیز بر نتایج تأثیر می گذارد.
ارزیابی عددی بر اساس محاسبه ریشه میانگین مربعات خطا (RMSE) برای تفاوت در ارتفاعات است. ارزیابی عددی فقط برای نقاطی انجام می شود که به سطوح برنامه ریز کمک می کنند. سطوح استخراج شده به دو گروه افقی و غیر افقی تقسیم می شوند. برای سطوح افقی، ارتفاع مرجع به صورت دستی برای تمام نقاط گوشه اندازه گیری می شود و یک مقدار متوسط محاسبه می شود. این مقدار برای ارزیابی ارتفاع گوشه های سطح پلنر استفاده می شود. برای
سطوح غیر افقی، ارتفاع مرجع به صورت دستی برای سه نقطه گوشه اندازه گیری می شود و برای محاسبه پارامترهای واقعی سطوح برنامه ریز استفاده می شود. سپس از این پارامترها برای محاسبه چندین ارتفاع مرجع با استفاده از مختصات افقی دقیق (X و Y) استفاده می شود. RMSE تفاوت بین ارتفاعات مرجع و ارتفاعات محاسبه شده با استفاده از تکنیک ارائه شده محاسبه و در جدول 1 ارائه شده است.. نتایج نشان می دهد که میانگین RMSE برای سطوح افقی حدود 5.3 سانتی متر است. میانگین RMSE برای سطوح شیبدار حدود 8 سانتی متر است. علاوه بر این، برای هر سایت آزمون یک DEM مرجع به صورت دستی جمع آوری می شود. میانگین RMSE برای DEM های به کار گرفته شده حدود 10 سانتی متر است. این الگوریتم برای هر نوع ساختمانی کاملاً کار می کند. اما محدودیت در مواردی است که قسمت هایی از ساختمان ها پوشیده از درخت باشد. همچنین به شیبهای تکههای سقف حساس است، یعنی مواردی که ممکن است بخشهای مختلف سقف با جهتگیریهای متفاوت از هم متمایز نشوند.
4. نتیجه گیری و پیشنهادات
این مقاله پتانسیل تولید سطوح برنامه ریز سه بعدی را با ادغام داده های ارتفاعی، ارائه شده توسط DEM های مبتنی بر همبستگی، و شدت تصویر نشان می دهد. نقاط DEM که به سطوح برنامه ریز کمک می کنند از سایر نقاط DEM با استفاده از ویژگی های مختلف متمایز می شوند. سپس نقاطی که به هر سطح برنامه ریز کمک می کنند برای قرار دادن صفحه در این سطح با استفاده از مدل تنظیم حداقل مربعات استفاده می شود. ورودی مدل مختصات سه بعدی تمام نقاط DEM است که به سطح کمک می کنند. سپس مدل حل می شود تا بهترین صفحه متناسب با این نقاط را پیدا کند. نتایج نشان می دهد که فرآیند پیشنهادی قادر به تشخیص تمام سطوح برنامه ریز آزمایش شده بدون سطوح کاذب است. دقت مکانی نشان می دهد که RMSE برای ارتفاع تعدادی از نقاط سطح برنامه ریز به صورت دستی انتخاب شده حدود 5 سانتی متر تا 8 سانتی متر است. RMSE به شیب سطح بستگی دارد. تحقیقات آینده بر روی آزمایش الگوریتم پیشنهادی بر روی DEM های مبتنی بر لیزر متمرکز خواهد بود. علاوه بر این، سایر ویژگیهای تمایز برای طبقهبندی نقاط سطح برنامهریز میتوانند آزمایش شوند. تکنیک های دیگری برای ترکیب ویژگی های پیشنهادی مانند شبکه های اعتقادی، سیستم های خبره، یا سیستم های منطق فازی می تواند مورد استفاده قرار گیرد. الگوریتم ما باید با هر پیکربندی سقف کار کند. با این حال، اگر بخشی از ساختمان توسط درختان پوشیده شود، ممکن است از کار بیفتد. الگوریتم ما باید با هر پیکربندی سقف کار کند. با این حال، اگر بخشی از ساختمان توسط درختان پوشیده شود، ممکن است از کار بیفتد. الگوریتم ما باید با هر پیکربندی سقف کار کند. با این حال، اگر بخشی از ساختمان توسط درختان پوشیده شود، ممکن است از کار بیفتد.
منابع
 |
customer@scirp.org |
 |
+86 18163351462 (واتس اپ) |
 |
1655362766 |
 |
 |
| انتشار مقاله وی چت |


بدون دیدگاه