

کلیدواژه:
شبکه های عصبی جاده؛ طبقه بندی؛ بافت
چکیده
استخراج جاده از تصاویر ماهوارهای میتواند در تهیه نقشه راه و همچنین مدیریت و توسعه پایگاههای اطلاعاتی مکانی استفاده شود. در این کار، استخراج جاده ها از تصاویر ماهواره ای SPOT با استفاده از شبکه عصبی مصنوعی مورد بررسی قرار گرفته است. سپس موقعیت تونل با استفاده از اطلاعات رقومی ارتفاع از تصویر استخراج می شود. همچنین سعی شده است تا با استفاده از اطلاعات طیفی و همچنین بافت و مورفولوژی، دقت روش استخراج جاده افزایش یابد. این روش بر روی تصاویر ماهواره ای SPOT تبریز و میانه (ایران) اجرا شد. نتایج این تحقیق نشان میدهد که میتوان با استفاده از بافت و مورفولوژی در طبقهبندی تصاویر با استفاده از شبکههای عصبی، دقت استخراج جاده را ارتقا داد. در نهایت موقعیت تونل با استفاده از اطلاعات رقومی ارتفاعی استخراج شد. اتصالات جاده ها و کوه ها پتانسیل بالایی در مکان یابی تونل دارند. به همین دلیل در این مطالعه، اتصالات جاده ها و کوه ها نیز شناسایی و مورد استفاده قرار گرفت.
1. مقدمه
1.1. استخراج جاده و تونل
استفاده از تصاویر ماهوارهای و پتانسیل آنها برای استفاده در کاربردهای مختلف مانند تهیه و بهروزرسانی نقشهها، استخراج خودکار اشیا، بهویژه جادهها و ساختمانها را به چالش جدیدی در سنجش از دور تبدیل کرده است [ 1 ]. استخراج خودکار جاده ابزاری را برای ایجاد، نگهداری و به روز رسانی شبکه های حمل و نقل فراهم می کند [ 1 ]. در این مطالعه، برای استخراج تونل از تصاویر ماهوارهای SPOT، ابتدا جادهها استخراج شده و سپس اتصالات جادهها و کوهها با استفاده از اطلاعات رقومی ارتفاعی شناسایی میشوند [ 2 ].]. زمین شناسی در امتداد تراز تونل نقش غالبی در بسیاری از تصمیمات عمده ای دارد که باید در برنامه ریزی، طراحی و ساخت تونل گرفته شود. زمین شناسی بر امکان سنجی، رفتار و هزینه هر تونل غالب است.
اگرچه درک آن دشوار است، اما ویژگی های مهندسی محیط زمین شناسی و تغییرات این ویژگی ها به اندازه خواص بتن یا فولاد مورد استفاده برای ساخت سازه تونل مهم است. در یک تونل، زمین نه تنها به عنوان مکانیزم بارگذاری، بلکه به عنوان رسانه اصلی پشتیبانی نیز عمل می کند. بنابراین، بسیار مهم است که مناسب ترین بررسی ژئوتکنیکی در مراحل اولیه برنامه ریزی برای هر تونل [ 3 ] انجام شود. آبهای زیرزمینی این پتانسیل را دارد که مشکلات زیادی برای کارهای زیرزمینی ایجاد کند و باید تلاش ویژهای برای تعریف سفرههای آب زیرزمینی، منابع آب، کیفیت و دما آب، عمق به آبهای زیرزمینی انجام شود [ 4 ].]. روشهای قوی برای استخراج خودکار و نیمه خودکار شبکههای جادهای از تصاویر ماهوارهای پیشنهاد شدهاند که در زیر تعداد کمی از آنها توضیح داده شده است.
1.2. مربوط به تحقیقات و بررسی
یک بررسی جامع در مورد روش های پیشنهادی برای استخراج جاده در منا (2003) یافت شده است که در آن این روش ها از جنبه های مختلف طبقه بندی شده اند. یک فهرست مرجع جامع نیز در دسترس است [ 5 ].
محمدزاده و همکاران (2006) یک روش تقسیم بندی فازی جدید برای تشخیص جاده در تصاویر ماهواره ای با وضوح بالا تنها با تعداد کمی از نمونه های جاده پیشنهاد کرد [ 6 ].
سپس با استفاده از یک عملگر مورفولوژیکی پیشرفته ریاضی، خطوط مرکزی جاده استخراج شد. یک استراتژی تشخیص جاده بر اساس طبقهبندیکنندههای شبکه عصبی توسط مختارزاده و ولادان (2007) معرفی شد که در آن انواع پارامترهای طیفی ورودی بر روی عملکرد شبکه عصبی برای تشخیص جاده و پسزمینه آزمایش شدند [ 7 ].
ایدبرائیم و همکاران (2008) یک سیستم خودکار استخراج جاده های شهری از تصاویر ماهواره ای و هوایی ارائه کرد. رویکرد آنها بر اساس یک فیلتر جهتی تطبیقی و تقسیم بندی حوضه [ 8 ] است.
مانگالا (2010) و همکاران. استخراج خودکار جاده روستایی را با استفاده از شبکه عصبی از تصویر ماهواره ای ارائه کرد [ 9 ].
تحقیق ارائه شده توسط منا و مالپیکا (2005) نمونه خوبی برای بهره برداری از اطلاعات بافت در استخراج جاده است. منا و مالپیکا در مقاله خود، با استفاده از اطلاعات برداری از قبل موجود و باندهای RGB تصاویر ماهواره ای یا هوایی با وضوح بالا، به روز رسانی GIS را انجام دادند. تقسیم بندی باینری انجام شده در این مطالعه بر اساس تحلیل پیشرونده بافت بود. سه سطح ارزیابی آماری بافت بر اساس چارچوب نظریه شواهد توسعه یافته است [ 10 ].
Xue Dongsheng (2005) تکنیکی را برای تشخیص خودکار ورودی های تونل از تصاویر سنجش از دور با وضوح فوق العاده ارائه کرد. اول، اکثر اجسام نامربوط مانند کوه ها و جنگل ها را در تصاویر سنجش از دور غربال می کند و مناطقی را که شامل اطلاعات احتمالی جاده هستند از تصاویر سنجش از دور استخراج می کند. از آنجا که این وظایف برای کاهش مساحتی است که شامل بذر جاده و کوتاه کردن زمان جستجوی جاده است، بر اساس تقسیم بندی آستانه ساده و سریع است. در منطقه جاده بالقوه، به طور خودکار بذر جاده را از نظر تغییر شکل تصادفی Hough بهبود یافته (GRHT) پیدا می کند، که نسبت به تبدیل تصادفی Hough در تشخیص سرعت و تشخیص دقت برتری دارد، سپس به طور خودکار جاده را از نقطه بذر جاده مطابق با تاکتیک پویا جستجو می کند. برنامه نويسي. سرانجام،11 ]. اتصالات جاده ها و کوه ها پتانسیل بالایی برای مکان یابی تونل ها دارند. به همین دلیل، در این مطالعه، اتصالات جاده ها و کوه ها شناسایی شده است.
این مقاله به شرح زیر سازماندهی شده است: در بخش 2 روش استخراج جاده توضیح داده شده است. در این بخش تصویر به روش شبکه عصبی طبقه بندی می شود. این روش از ویژگی های طیفی و بافت برای طبقه بندی تصویر استفاده می کند تا دقت بالایی به دست آورد. این ویژگی ها به عنوان داده های ورودی به شبکه عصبی معرفی می شوند. هنگامی که طبقه بندی انجام شد، برای اتصال پیکسل های جاده و کاهش نویزهای ناشی از طبقه بندی، از یک روش ریخت شناسی ریاضی استفاده شد و الگوریتمی برای اتصال پیکسل های جاده بر اساس پیکسل های مجاور معرفی شد و سپس خطوط کوتاه حذف شدند. پس از استخراج جاده از تصویر SPOT با استفاده از داده های ارتفاعی و با کمک آبراه ها و داده های شیب، محل تونل ها کشف شد. در بخش 3، نتایج ارزیابی شده و در نهایت نتیجه گیری در بخش 4 ارائه می شود.
برای اجرای این کار از تصویر SPOT جاده بین تبریز و میانه در ایران استفاده شده است. این تصویر در سال 2005 در 4 باند با مرجع فضایی به دست آمده است. بخشی از این تصویر در شکل 1 نشان داده شده است .
2. روش شناسی
2.1. استخراج جاده از تصویر SPOT
به منظور استخراج جاده از تصویر ماهواره ای، روش ها معمولاً بسته به وضوح مکانی و ویژگی های حسگر است. در این تصاویر، جاده ها به صورت خطوط نازک در وضوح پایین و در تصویر با وضوح بالا نشان داده شده اند. جاده ها به عنوان منطقه همگن ظاهر می شوند [ 7 ]. روشهای مختلفی برای طبقهبندی تصاویر وجود دارد که شبکههای عصبی یکی از روشهای پرکاربرد در این زمینه است در این تحقیق، تصویر از طریق شبکه عصبی طبقهبندی شده و به دو دسته جادهای و غیر جادهای تقسیم میشود. در ادامه، طبقهبندی با روش شبکههای عصبی به اختصار مورد بحث قرار میگیرد.
 (الف)
(الف)  (ب)
(ب)
شکل 1 . الف) تصویر نقطه ای از جاده تبریز – میانه در ایران؛ (ب) نقشه توپوگرافی 1:25000 این منطقه.
2.1.1. طبقه بندی تصاویر با استفاده از روش شبکه عصبی
شبکه های عصبی مصنوعی (ANN) یک مدل غیر خطی است که شبیه به سیستم عصبی انسان عمل می کند. هر شبکه عصبی مصنوعی از یک سری گره و اتصالات وزنی بین آنها تشکیل شده است [ 12 ]. یک نمودار شماتیک از ساختار یک ANN در شکل 2 نشان داده شده است .
در واقع گره ها توسط کانکتورهای وزنی به لایه های مختلف شبکه عصبی مصنوعی متصل می شوند. در ANN لایه های مختلفی وجود دارد که به طور کلی می توان آنها را به سه گروه لایه های ورودی تقسیم کرد، لایه های پنهان و لایه های خروجی [ 12 ]. ANN از دو مرحله در طبقه بندی، آموزش و یادآوری تشکیل شده است [ 7 ]. در مرحله آموزش، عملیاتی برای بهبود ضرایب وزن اتصال از طریق برخی فرآیندهای تکرار انجام می شود. در این مرحله آموزش از ورودی ها و خروجی های شناخته شده استفاده می شود و در نتیجه طبقه بندی نظارتی نامیده می شود. روش انتشار برگشتی مبتنی بر مفهوم پیشنهادی پارکر و روملهارت (1980) است. این روش یک الگوریتم تکرار گرادیان است که برای به حداقل رساندن خطا همانطور که در رابطه (1) نشان داده شده است، استفاده می شود .
 (1)
(1)
که در آن، d j و o j به ترتیب خروجی مورد نظر و خروجی ANN هستند. بر اساس نتایج معادله (1)، مقدار تصحیح برای هر وزن قابل محاسبه است [ 5 ].
 (2)
(2)
در اینجا W وزن بین دو گره است و η پارامتر ثابت مثبتی است که برای تنظیم استفاده میشود و نرخ تمرین نامیده میشود. α یک عامل حرکت است (معمولاً ضریب پایداری نامیده می شود) و می تواند ارزش داشته باشد
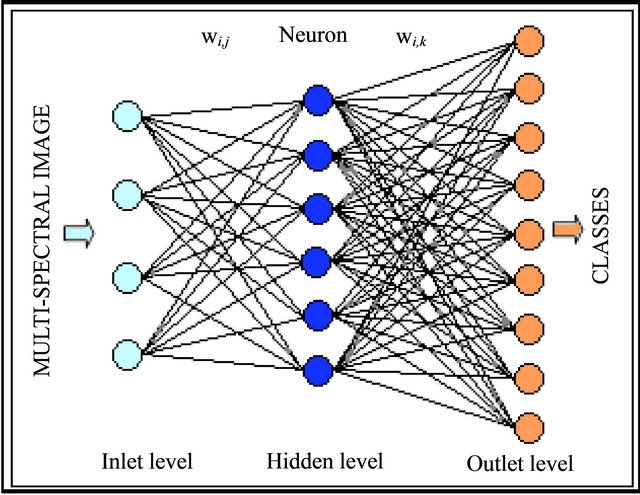
شکل 2 . نمودار شماتیک ساختار یک شبکه عصبی مصنوعی.
بین 0 و 1 و t تعداد تکرارها است [ 12 ]. در مرحله یادآوری، شبکه عصبی مصنوعی با توجه به ضرایب وزنی آموزش دیده کار می کند و درون یابی و برون یابی را انجام می دهد. یکی از امتیازات روش ANN در مقایسه با روشهای آماری سنتی این است که شبکهها در توزیع آزاد هستند، یعنی آموزش و فراخوانی بسته به ترکیب خطی بین الگوهای داده و مستقل از دادههای ورودی است [12،13]. با این حال دلایل موفقیت شبکه عصبی مصنوعی در طبقه بندی را می توان به صورت زیر خلاصه کرد: 1) عدم نیاز به پیش فرض در توزیع داده ها. 2) به کاربر اجازه می دهد تا از دانش اولیه در مورد کلاس ها و محدودیت های احتمالی استفاده کند. 3) روش قادر به مدیریت داده های مکانی از چند منبع است و می تواند به نتایج طبقه بندی آنها به طور مساوی دست یابد.13 ].
2.1.2. ویژگی های بافت
ورودی های شبکه عصبی نقش مهمی در افزایش دقت طبقه بندی دارند. وضوح فضایی تصویر SPOT 10 متر است. جاده ها به صورت خطوط باریک نشان داده می شوند. رودخانه ای نزدیک جاده وجود دارد. رودخانه ها در تصویر SPOT دارای ویژگی های طیفی و هندسی مانند جاده ها هستند. این امر استخراج جاده را دشوار می کند. به همین دلیل تنها با استفاده از ویژگی های طیفی نمی توان جاده ها را با دقت بالا استخراج کرد. از اطلاعات بافت می توان برای افزایش دقت طبقه بندی استفاده کرد. در این تحقیق از میانگین و واریانس و آنتروپی به عنوان سه پارامتر بافت استفاده شده است. بافت واریانس برای تشخیص تغییرات خطی نقش مهمی ایفا می کند زیرا در جاده ها، روشنایی پیکسل ها به شدت در مقایسه با پیکسل های اطراف تغییر می کند. بنابراین می توان از آن برای استخراج خطوط جاده از تصویر استفاده کرد. بین بافت آنتروپی و هیستوگرام تصویر رابطه وجود دارد. در تصاویر با وضوح پایین، تعداد پیکسل های جاده کم است. همچنین بین بافت آنتروپی و هیستوگرام تصویر رابطه وجود دارد. در تصویر با وضوح پایین، تعداد پیکسل های جاده کم است. سپس این پیکسل ها در بافت Entropy دارای مقادیر خاصی هستند. به همین دلیل می توان از آنتروپی برای افزایش دقت طبقه بندی استفاده کرد. معادله (3) نحوه استفاده از آنتروپی بافت را در تصویر نشان می دهد [14 ].
 (3)
(3)
P مقدار عددی برای هر پیکسل از هیستوگرام تصویر است با توجه به مطالعات مختلف، ویژگی های بافت از باند به باند متفاوت است [ 7 ]. در این مطالعه، داده های بافت از تصاویر SPOT برای هر یک از باندها با استفاده از نرم افزار ENVI 4.7 تولید شد.
2.2. عملکرد طبقه بندی با استفاده از یک شبکه عصبی مصنوعی
داده های ورودی برای شبکه های عصبی حاوی اطلاعات پیکسلی در 4 باند و ویژگی های بافتی، میانگین، واریانس و مقادیر آنتروپی برای هر باند است. تعداد داده های ورودی 16 است. همانطور که در قسمت 3 – 1 ذکر شد، داده های آموزشی برای آموزش یک شبکه عصبی مصنوعی مورد نیاز است. نمونه های آموزشی نقش مهمی در افزایش دقت طبقه بندی دارند. همانطور که قبلا ذکر شد، تصویر دارای مرجع فضایی است. با استفاده از نقشه توپوگرافی، 47 پیکسل جاده و 1342 پیکسل غیر جاده به عنوان داده های آموزشی استفاده می شود. برای طراحی شبکه عصبی، تعداد لایهها و نورونهای مختلف در این پروژه آزمایش میشود. مطابق جدول 1بهترین نتایج در شبکه عصبی با 4 لایه مشاهده شد. این شبکه دارای یک لایه ورودی با 16 نورون و دو لایه پنهان با 20 نورون در هر لایه و همچنین یک لایه خروجی با تک نورون است. نرخ یادگیری 0.4 و مقدار حرکت 0.5 است. حداقل خطا به ترتیب 0.001 است. تعداد تکرار 1000 بود و این شبکه از تابع لجستیک به عنوان تابع فعال سازی استفاده می کرد.
پس از آموزش شبکه عصبی، الگوریتم طبقه بندی بر روی کل تصویر انجام شد که تصویر طبقه بندی شده حاصل در شکل 3 نشان داده شده است .
2.3. اتصال پیکسل های جاده
برای استخراج جاده، نویز ایجاد شده توسط تصویر باید حذف شود. مورفولوژی ریاضی برای اتصال پیکسل های جاده و حذف نویزها استفاده می شود. مورفولوژی اتساع برای حذف شکاف های موجود در پیکسل های متصل استفاده می شود و سپس با استفاده از مورفولوژی نازک، عمل باریک اجرا می شود. پیکسل های پراکنده ای در تصویر وجود دارد. یک فیلتر با اندازه 50 در 50 روی تصویر حرکت می کند. تعداد پیکسل های سیاه در هر مربع 50 در 50 شمارش می شود. اگر این عدد بزرگتر از 40 باشد، مربع بدون تغییر باقی می ماند. اما اگر این عدد کمتر از 40 بود، تمام پیکسل های مربع صفر می شد. نوع پنجره ای که روی تصویر حرکت می کند و تعداد پیکسل های سیاه در هر پنجره با توجه به وضوح فضایی تصویر قابل تغییر است. نتیجه فرآیند در شکل 4 نشان داده شده است .
پس از این مرحله، پیکسل هایی که به عنوان جاده شناخته می شوند باید به یکدیگر متصل شوند. در اینجا یک الگوریتم برای اتصال این پیکسل ها پیشنهاد شده است. یک ماسک با اندازه 3 در 3 روی تصویر حرکت می کند. اگر پیکسل مرکزی و یکی از همسایگی های آن 1 باشد، بردار با چهار جزء تشکیل می شود.
دو جزء اول مختصات پیکسل مرکزی و دو جزء دیگر مختصات پیکسل همسایه هستند. پس از این مرحله، بردارهای تکراری هستند
جدول 1 . نتایج تحقیق در مورد تعداد لایه ها و گره ها در شبکه عصبی مصنوعی.


شکل 3 . تصویر طبقه بندی شده تولید شده به روش ANN.

شکل 4 . تصویر تولید شده با حذف پیکسل های پراکنده.
حذف شده. جهت های شمالی و شرقی به عنوان جهت اصلی تعریف می شوند. با این تعریف، اگر پیکسل 2 در شمال یا شرق پیکسل 1 قرار گیرد، پیکسل 1 به پیکسل 2 متصل می شود. سپس آن دسته از بردارهایی که با آستانه مشخص به یکدیگر نزدیک هستند (در اینجا در 7 پیکسل) به یکدیگر متصل می شوند. سپس اگر فاصله بین آنها کمتر از 10 پیکسل باشد، بردارهای جدید بعدی به یکدیگر متصل می شوند. در حرکت بعدی آن خطوطی که به تنهایی باقی مانده اند که نمی توانند به عنوان جاده طبقه بندی شوند، حذف می شوند.
آن خطوط با طول کمتر از 50 متر نیز حذف می شوند. پس از این مرحله، ممکن است همچنان مقداری نویز باقی بماند. اما برای حذف بقیه نویزها از تصویر می توان از مدل ارتفاعی دیجیتال استفاده کرد. برای این منظور می توان نقشه های آبراه و شیب را از مدل رقومی ارتفاع استخراج کرد. این تصاویر در شکل 5 نشان داده شده است.
واقعیت این است که پیکسل های جاده را نمی توان در مسیر آب قرار داد و مقدار شیب جاده معمولاً بیشتر از 40 درصد نیست. پیکسل هایی که از این شرایط پیروی نمی کنند حذف می شوند. تصویر حاصل در شکل 6 نشان داده شده است .
خطوطی که به جاده معروف هستند باید به یکدیگر متصل شوند. اما لازم به ذکر است که در صورت وجود تونل، خطوط جاده قطع میشوند. در اینجا محل اتصال جاده ها و کوه ها پتانسیل بالایی برای تعیین موقعیت تونل ها دارد. در این مطالعه ابتدا اتصالات جاده ها و کوه ها شناسایی می شود. به همین دلیل برای اتصال خطوط ابتدا شروع و انتهای خطوط مشخص می شود. سپس یک شرط تعریف می شود که اگر پیکسل 1 انتهای یک خط بود و پیکسل 2 شروع یک خط بود، در حالی که پیکسل 2 در شمال یا شرق پیکسل 1 قرار داشت. پیکسل هایی که در خط اتصال بین پیکسل 1 و پیکسل 2 تعیین می شود. از هر پیکسل با 8 محله، اگر 5 پیکسل دارای مقدار شیب بیشتر از 40 درصد باشند، آن پیکسل با رنگ قرمز نشان داده می شود در غیر این صورت آن پیکسل به صورت سیاه نشان داده می شود. سپس پیکسل های قرمز رنگی که در خط اتصال بین پیکسل 1 و پیکسل 2 وجود دارند شمارش می شوند. اگر تعداد آنها بیشتر از 5 باشد، آن پیکسل ها به عنوان تونل شناخته می شوند، در غیر این صورت پیکسل های موجود در خط ارتباط بین پیکسل 1 و پیکسل 2 به عنوان جاده شناخته می شوند. تصویر توسط این الگوریتم تولید می شود که در نشان داده شده استشکل 7 .
 (الف) (ب)
(الف) (ب)
شکل 5 . (الف) تصویر آبراه از منطقه مورد مطالعه؛ ب) تصویر شیب از منطقه مورد مطالعه.

شکل 6 . تصویر تولید شده توسط الگوریتم اتصال و حذف پیکسل های جاده در آبراهه یا دارای مقدار شیب بیشتر از 40 درصد قرار می گیرد.

شکل 7 . مکان تونلی که توسط الگوریتم تولید می شود.
3. ارزیابی نتایج
الگوریتم های استخراج جاده با استفاده از ماتریس سردرگمی ارزیابی می شوند ( جدول 2 ). برای ارزیابی نتایج 1244 پیکسل از جاده ها و 140508 پیکسل از جاده های غیر جاده به عنوان داده های آزمون به الگوریتم معرفی شد. لازم به ذکر است که قبلا از این داده ها به عنوان داده های آموزشی استفاده نشده است.
همانطور که مشاهده می شود، حذف نویز، دقت طبقه بندی را افزایش داده و پیکسل های واقعی جاده به درستی تشخیص داده می شوند. برای ارزیابی استخراج تونل، موقعیت تونلی که توسط الگوریتم استخراج شده است در نقشه گوگل نشان داده شده است. شکل 8 نشان می دهد که الگوریتم به درستی مکان تونل را تشخیص داده است.
جدول 2 . ماتریس سردرگمی برای استخراج جاده توسط الگوریتم پیشنهادی


شکل 8 . تونل استخراج شده از الگوریتم در تصویر Google Earth نشان داده شده است.
4. نتیجه گیری
نیما قاسملو، محمدرضا مبشری، احمد معدنچی زارع، مهران معمار افتخاری سنجش از دور ابزاری است که با استفاده از آن می توان به طور غیر مستقیم اطلاعات ارزشمندی را به دست آورد. لازم به ذکر است جاده ها در تصویر ماهواره ای به اشکال مختلف نشان داده می شوند. الگوریتم های استخراج جاده به وضوح فضایی تصویر بستگی دارد. طبقه بندی تصویر یکی از روش های مورد استفاده برای استخراج جاده است. همچنین استفاده از شبکه های عصبی در طبقه بندی تصاویر جدید است. می تواند دقت طبقه بندی را افزایش دهد و زمان پردازش را کاهش دهد. در این تحقیق از روش شبکه های عصبی برای طبقه بندی تصاویر استفاده شده است. شبکه های داده ورودی نقش مهمی در افزایش دقت طبقه بندی دارند. پارامترهای بافت برای بهبود دقت طبقه بندی استفاده می شود. مورفولوژی ریاضی برای حذف نویزها و اتصال پیکسل های جاده استفاده می شود. مکان تونل با استفاده از اطلاعات ارتفاعی دیجیتال شناسایی می شود. اتصالات جاده ها و کوه ها پتانسیل بالایی برای مکان یابی تونل ها دارند. به همین دلیل، در این مطالعه، اتصالات جاده ها و کوه ها شناسایی شده است.
منابع
- M. مختارزاده، MJV Zoej و H. Ebadi، «استخراج خودکار جاده از تصویر ماهوارهای با وضوح بالا با استفاده از شبکههای عصبی، تحلیل بافت، خوشهبندی فازی و الگوریتمهای ژنتیک»، آرشیو بینالمللی فتوگرامتری، سنجش از دور و فضایی، علوم اطلاعات پکن، 2008. [زمان(های استناد): 2]
- KD Bulter، «تشخیص و ویژگیهای حفرههای زیرسطحی، تونلها و معادن متروکه»، شرکت علم و فناوری آلیون، ویکسبورگ، 1996. [زمان(های استناد): 1]
- جی. منا، «وضعیت هنر در استخراج خودکار جاده برای بهروزرسانی GIS: طبقهبندی بدیع»، نامههای تکرار الگو، جلد. 24، شماره 16، 1382، صص 3037-3058. doi:0.1016/S0167-8655(03)00164-8 [زمان(های استناد): 1]
- O. Wiliams، “اکتشافات ژئوتکنیکی برای تونل ها و شفت ها”، 1997. https://140.194.76.129/publications/eng-manuals/index.html [زمان(های استناد): 1]
- دبلیو هاروی “برنامه ریزی و بررسی مکان در تونل سازی”، مراکز تجاری برتر، بلوو، 1996. [زمان(های استناد): 2]
- A. Mohammadzadeh, A. Tukoli and MJV Zoej, “Road Extraction based on Fuzzy Logic and Mathematical Moorphology from Pan-Sharpened IKONOS Images” The Photogrammetric Record, Vol. 21، شماره 113، 2006، صفحات 44- 60. doi:0.1111/j.1477-9730.2006.00353.x [زمان(های استناد): 1]
- M. Mokhtarzade, H. Ebadi and MJV Zoej, “Optimization of Road Detection from High-Resolution Satellite Images Using Texture Parameters in Neural Network Classifiers” Canadian Journal of Remote Sensing, Vol. 33، شماره 6، 1386، صص 481-491. doi: 0.5589/m07-055 [زمان(های) نقل قول: 5]
- S. Idbraim, D. Mammass, D. Aboutajdine and D. Ducrot, “An Automatic for Urban Extraction Road from Satellite and Aerial Images,” WSEAS Transactions on Signal Processing, Vol. 4، شماره 10، 1387، صص 563-572. [زمان(های استناد): 1]
- R. Mangala، “یک سیستم طبقه بندی مبتنی بر ANN موثر برای استخراج جاده های روستایی در تصاویر ماهواره ای”، مجله اروپایی تحقیقات علمی، جلد. 47، شماره 4، 1389، صص 574-585. [زمان(های استناد): 1]
- J. Mena and JA Malpica, “An Automatic Method for Extraction Road in Rural and Semi-urban مناطق با شروع از تصاویر ماهواره ای با وضوح بالا”، Pattern Recognition Letters, Vol. 26، شماره 9، 1384، صص 1201-1220. doi:0.1016/j.patrec.2004.11.005 [زمان(های استناد): 1]
- DS Xue و D. Yin، “مطالعه ای در مورد شناسایی خودکار ورودی های تونل از تصاویر سنجش از راه دور با وضوح فوق العاده”، دانشگاه علم و فناوری چین، هفی، 2005. [زمان(ها):1]
- GY Yang، “نقشه برداری زمین شناسی از داده های چند منبعی با استفاده از شبکه های عصبی”، M.Sc. پایان نامه، دانشگاه کلگری، کلگری، 1995. [Citation Time(s):3]
- F. Carvajal، “تشخیص خانه سبز با استفاده از شبکه عصبی با تصویر ماهواره ای با وضوح بسیار بالا”، PRS Technical Commission VI Symposium، توکیو، 2006. [Citation Time(s):1]
- RC Gonzalez و RE Woods, “Digital Image Processing,” Addison-Wesley, Boston, 1992. [Citation Time(s):1]


بدون دیدگاه