1. مقدمه
سیستمهای حملونقل هوشمند (ITS) بخش مهمی از چارچوب اطلاعات جغرافیایی شهری هستند و تراکم ترافیک جادهای به یک مشکل گسترده در مناطق شهری تبدیل شده است که مانع کارایی عملیاتی سیستمهای ترافیک شهری و کاربرد هوشمند ژئو انفورماتیک شهری میشود. مشکل تراکم ترافیک جاده ای شهری ناشی از تراکم بالای جمعیت، تعداد بیش از حد وسایل نقلیه موتوری در ساعات اوج مصرف و عدم تعادل در عرضه و تقاضا در شبکه های حمل و نقل است [ 1 ]. بنابراین، شبکههای جادهای عظیم و زیرساختهای ترافیکی در تلاش برای کاهش این مشکل ساخته شدهاند [ 2]. با این حال، گزارش شده است که ساخت مداوم جادهها به تنهایی برای افزایش بسیار ظرفیت جادهها برای کاهش تراکم ترافیک طولانیمدت ناکارآمد، غیرعملی و پرهزینه است [ 3 ]. در واقعیت، بخشهای مختلف جاده آزاد وجود دارد که در صورت شلوغی سایر بخشهای جاده، اثرات مثبتی ایجاد نمیکنند [ 4 ، 5 ]. در نتیجه، یک طرح هدایت مسیر معقول برای وسایل نقلیه یک گزینه عملی در ایجاد یک سیستم مدیریت کنترل ترافیک موثر و بهبود استاندارد خدمات ژئو انفورماتیک شهری است.
در چند دهه گذشته، برنامه ریزی مسیر وسایل نقلیه به طور گسترده در زمینه های مهندسی ترافیک و کنترل اتوماسیون برای بهینه سازی مشکلات در حمل و نقل، توزیع و تدارکات مورد مطالعه قرار گرفته است. چندین الگوریتم برنامهریزی مسیر کلاسیک وجود دارد که کوتاهترین مسیر را بین دو مکان در شبکههای جادهای محاسبه میکند، مانند الگوریتمهایی مانند Dijkstra [ 6 ]، جستجوی A* [ 7 ]، Bellman-Ford [ 8 ] و جستجوی دوطرفه [ 9 ].] الگوریتم ها علاوه بر این، روشهای مختلف بهبود یافته نیز برای رسیدگی به سایر الزامات سفر پیچیده، از جمله بهبود راندمان محاسباتی و کاهش تراکم ترافیک، پیشنهاد شدهاند. به عنوان مثال، بازده برنامه ریزی مسیر جریان ترافیک در مقیاس بزرگ در شبکه های جاده ایستا را می توان با بهبود کارایی جستجو با استفاده از تکنیک های بهینه سازی مانند سلسله مراتب جاده ها [ 10 ]، پارتیشن بندی شبکه جاده [ 11 ] و جستجوی دسته ای [ 12 ] بهبود بخشید.]. با این وجود، برنامه ریزی مسیر در دنیای واقعی چیزی بیش از شناسایی کوتاه ترین طول مسیر بین دو نقطه در یک شبکه استاتیک است. همچنین شامل چندین پارامتر پویا، مانند سطوح تراکم ترافیک، حوادث تصادفی، و شرایط آب و هوایی در میان سایر موارد است. علاوه بر این، سفر انسان یک فرآیند پویا در یک دوره زمانی است، به این معنی که مسیر بهینه ناگزیر با پیشرفت سفر تغییر می کند. به طور معمول، مسیرهای برنامه ریزی شده به طور مداوم برای بهینه سازی مسیرهای سفر به صورت پویا در هر مرحله زمانی گسسته تنظیم می شوند [ 13 ، 14 ]. بنابراین، برای وسایل نقلیه ضروری است که مسیرهای برنامه ریزی شده خود را به صورت تطبیقی تنظیم کنند تا از تراکم ترافیک جلوگیری کنند.
توسعه وسایل نقلیه متصل (CV) که می توانند با یکدیگر ارتباط برقرار کنند و اطلاعات مهمی مانند مکان وسیله نقلیه، سرعت حرکت، شرایط ترافیکی و مسافت را ارائه دهند، یک راه حل بالقوه برای مشکل برنامه ریزی مسیر تطبیقی در جریان ترافیک در مقیاس بزرگ است. به دلیل محاسبات توزیع شده و توانایی های تصمیم گیری مستقل آنها [ 15 ]. یک رویکرد شناخته شده برای هماهنگ کردن CV های متعدد، طراحی یک چارچوب توزیع شده است که در آن هر CV به عنوان یک جمع آوری کننده اطلاعات ترافیک و گره محاسباتی قدرتمند عمل می کند [ 16 ، 17 ]. این می تواند به طور قابل توجهی بار محاسباتی را در مراکز برنامه ریزی مسیر کاهش دهد [ 18]. علاوه بر این، هر CV می تواند به طور مستقل مسیر خود را با توجه به اطلاعات محلی از وسایل نقلیه همسایه [ 15 ] با استفاده از ارتباطات بی سیم و فناوری های محاسباتی توزیع شده برنامه ریزی کند. استراتژی های برنامه ریزی مسیر با نیازهای مختلف سفر، مانند زمان سفر [ 19 ، 20 ]، پایداری مسیر [ 21 ]، مصرف سوخت [ 22 ]، امنیت [ 23 ] و عادات مسافر [ 17 ]، به طور گسترده در چارچوب های توزیع شده مورد مطالعه قرار گرفته اند. .
این استراتژیهای مسیریابی فرد محور حداکثر سود مسافران را دنبال میکنند که معمولاً با کارایی ترافیک جهانی در تناقض است [ 24 ، 25 ]. اگرچه طرحهای مسیریابی بهینه برای وسایل نقلیه فردی میتواند زمان سفر آنها را کوتاه کند، اما برای کاهش ازدحام کلی ترافیک مفید نیست و منجر به ناکارآمدی در شبکه کلی جاده میشود [ 26 ، 27 ]. در مطالعه موردی بوستون، ایالات متحده، تحلیل تجربی توسط یون و همکاران. نشان داد که افراد تقریباً 30٪ از زمان سفر خود را به دلیل مسیرهای شخصی خود هدر می دهند [ 26 ]، که می تواند تا دو برابر حداقل زمان سفر سیستم ترافیک در موارد خاص باشد [ 24 ].]. بنابراین، برای کاهش زمان کلی سفر و کاهش تراکم ترافیک، ما یک روش جدید برنامهریزی مسیر مبتنی بر مکانیسم پیشنهادی را پیشنهاد میکنیم که برای برنامهریزی طرحهای مسیریابی وسایل نقلیه با هماهنگی با عوامل بخش جادهای متعدد معرفی شده است. تازگی مطالعه ما در این است که چندین عامل به طور مشترک برای تدوین طرحهای مسیریابی از طریق یک مکانیسم مناقصه مذاکره میکنند، که امکان کاهش تراکم ترافیک و بهبود کارایی کلی ترافیک شبکههای جادهای را فراهم میکند. از طریق آزمایشهایی در ووهان، چین، نشان میدهیم که زمان سفر جهانی مسیرهای برنامهریزی شده با روش پیشنهادی به طور متوسط 32.71٪ کاهش مییابد. علاوه بر این، بار محاسباتی برنامه ریزی مسیر که بین CV ها و عوامل بخش جاده توزیع می شود، کارایی محاسباتی کلی را بهبود می بخشد.
مشارکت های اصلی این مطالعه را می توان به شرح زیر خلاصه کرد:
- (1)
-
تا جایی که می دانیم، ما برای اولین بار به صورت مبتکرانه یک مکانیسم مناقصه را برای هماهنگی پویا طرح های مسیریابی طرح برای وسایل نقلیه تحت تأثیر ازدحام بر اساس مدل مرکز برنامه ریزی تقاطع جاده معرفی می کنیم. در این مکانیسم، طرحهای برنامهریزی مسیر مستقل مراکز کنترل در یک چارچوب متمرکز به یک فرآیند مذاکره مسیر از چندین CV و عوامل بخش جاده تبدیل میشوند که منجر به بهبود کارایی ترافیک در شبکه راهها میشود.
- (2)
-
زمان سفر وسایل نقلیه فردی و جهانی هنگام تعیین قیمت های پیشنهادی در مدل به طور همزمان در نظر گرفته می شود، که مزایای خودروهای فردی و کارایی جهانی را در فرآیندهای برنامه ریزی مسیر متعادل می کند. بنابراین، روش پیشنهادی میتواند کارایی کلی ترافیک را بهبود بخشد و در عین حال از ازدحام برای وسایل نقلیه فردی جلوگیری کند.
- (3)
-
یک الگوریتم جستجوی محلی مبتنی بر اولویت جدید برای رسیدگی به مشکل تخصیص ترکیبی بین جریان ترافیک در مقیاس بزرگ و بخشهای جاده در فرآیند برنامهریزی مجدد مسیر مبتنی بر مناقصه پیشنهاد شده است. این الگوریتم با انتخاب ترکیبی از طرح های برنده به جای یک طرح واحد، کارایی برنامه ریزی مجدد مسیر را بهبود بخشید.
- (4)
-
ادامه این مقاله به شرح زیر سازماندهی شده است. بخش 2 فرآیند برنامه ریزی مسیر پویا را تشریح می کند. روش پیشنهادی برای برنامه ریزی مسیر پویا با توجه به مکانیسم پیشنهاد در بخش 3 توضیح داده شده است . بخش 4 روش ها و نتایج آزمایش های موردی شبیه سازی انجام شده برای تجزیه و تحلیل طرح های مسیریابی و کارایی محاسباتی روش پیشنهادی را گزارش می کند. در نهایت، بخش 5 بحث و نتیجه گیری این مطالعه را ارائه می کند.
2. بررسی اجمالی روش برنامه ریزی مسیر پویا
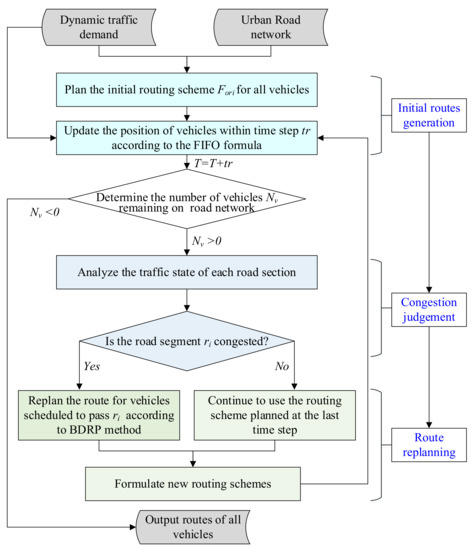
گسسته سازی زمان یک روش محبوب برای تحقق برنامه ریزی مسیر پویا است [ 13 ، 14 ]. برنامه ریزی مجدد مسیرهای همه وسایل نقلیه در هر مرحله زمانی برای دستیابی به مسیرهای پویا بهینه، منابع محاسباتی قابل توجهی را مصرف می کند [ 13 ]]. با این حال، در یک سناریوی واقعی ترافیک، تنها تعداد کمی از وسایل نقلیه تحت تأثیر ازدحام ممکن است نیاز به برنامه ریزی مجدد مسیر داشته باشند. علاوه بر این، هیچ تفاوت آشکاری در مسیرهای وسایل نقلیه در بسیاری از جاده های بدون مانع قبل و بعد از برنامه ریزی مجدد وجود ندارد. بنابراین، سرمایه گذاری در زمان محاسباتی قابل توجه ممکن است به طور قابل توجهی هزینه سفر کل شبکه حمل و نقل را کاهش ندهد. بنابراین، در روش پیشنهادی، تنها مسیر رانندگی وسایل نقلیه ای که تحت تأثیر ازدحام قرار می گیرند، به صورت پویا از قبل برنامه ریزی می شوند. وسایل نقلیه در بخشهای جادهای بدون مانع به طرح مسیریابی اولیه برنامهریزیشده خود ادامه میدهند تا تعادلی بین بار محاسباتی و کارایی حملونقل شبکه جادهای حاصل شود.
جریان برنامه ریزی مسیر پویا در شکل 1 نشان داده شده است که شامل تولید مسیر اولیه، قضاوت تراکم و برنامه ریزی مجدد مسیر است. اول، وسایل نقلیه طرح های مسیر بهینه اولیه خود را F یا به طور مستقل با توجه به تراکم ترافیک اولیه برنامه ریزی می کنند. سپس، وسایل نقلیه موقعیت خود را بر اساس فرمول first-in-first-out (FIFO) در یک مرحله زمانی به روز می کنند. متعاقباً، بخشهای جادهای با تراکم ترافیک آشکار از طریق روش خوشهبندی [ 28 ] شناسایی میشوند. در نهایت، طرح های مسیریابی از قبل با توجه به مکانیسم مناقصه برای وسایل نقلیه ای که در هر مرحله زمانی تحت تأثیر ازدحام قرار می گیرند، برنامه ریزی مجدد می شوند (به بخش 3.1 مراجعه کنید.) در حالی که وسایل نقلیه واقع در سایر بخش های جاده بدون تراکم به حرکت در مسیرهای برنامه ریزی شده خود ادامه می دهند. مکان وسیله نقلیه به طور مداوم به روز می شود تا زمانی که همه وسایل نقلیه به مقصد خود برسند.
در سناریوهای شبیه سازی، موقعیت خودرو در زمان واقعی را می توان با توجه به حرکت حجم ترافیک از بخش جاده تعیین کرد به بخش جاده در هر مرحله زمانی رابطه بین جریان ترافیک و تراکم مطابق با یک تابع مثلثی یا ذوزنقه ای است، همانطور که در شکل 2 نشان داده شده است. در شکل، تراکم ترافیک را نشان می دهد، تراکم ترافیک زمانی است که جاده ها شلوغ هستند، نشان دهنده جریان ترافیک است، جریان اشباع بخش جاده است، سرعت جریان ترافیک آزاد را نشان می دهد و سرعت انتشار برگشتی در ترافیک سنگین است. بر اساس این رابطه بین جریان ترافیک و تراکم، نرخ جریان بخش های جاده را می توان به صورت زیر بیان کرد:
بنابراین، در گام زمانی ، حجم ترافیکی که به بخش جاده جریان دارد از بخش جاده است
جایی که نشان دهنده حجم ترافیکی است که در بخش جاده جریان دارد در بازه زمانی ، نرخ جریان ترافیکی است که به بخش جاده جریان دارد در زمان ، تراکم ترافیک بخش جاده است در زمان ، حداکثر نرخ جریان جریان به بخش جاده است در زمان ، و تراکم ترافیک بخش جاده است در زمان . بر این اساس، عوامل بخش جاده می توانند حجم ترافیک ورودی و خروجی هر بخش جاده را بدست آورند. بنابراین، موقعیت وسیله نقلیه به صورت پویا طبق فرمول FIFO در طول فرآیند برنامه ریزی مجدد مسیر به روز می شود.
3. روش برنامه ریزی مسیر پویا مبتنی بر مناقصه (BDRP).
3.1. وسیله نقلیه مبتنی بر مناقصه – روش برنامه ریزی هماهنگی جاده
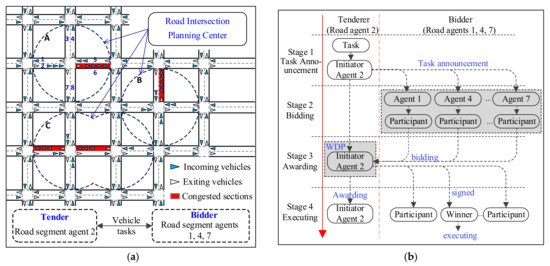
در اصل، برنامه ریزی مجدد مسیر وسیله نقلیه را می توان به عنوان یک مسئله تخصیص ترکیبی در نظر گرفت که در آن چندین وسیله نقلیه به بخش های مختلف جاده در تقاطع های جاده اختصاص داده می شوند. از این رو، یک روش برنامه ریزی هماهنگی خودرو-جاده مبتنی بر مناقصه برای تکرار مسیر وسایل نقلیه تحت تأثیر ازدحام پیشنهاد شده است. ابتدا، تقاطعی که در آن بخشهای جادهای پر ازدحام قرار دارند، بهعنوان یک مرکز برنامهریزی مجازی و نسبتاً مستقل مدلسازی میشوند (همانطور که در شکل 3 نشان داده شده است.الف، سناریوی تقاطع A). عوامل بخش جاده در مراکز برنامه ریزی در مورد مسیرهای بهینه برای وسایل نقلیه خود که در داخل تحت تأثیر ازدحام قرار گرفته اند مذاکره می کنند. سپس، یک مکانیسم پیشنهادی بهبود یافته برای مذاکره در مورد طرح واگذاری وظایف خودرو معرفی میشود. به عنوان یک چارچوب مذاکره توزیع شده، مکانیسم مناقصه می تواند برای تخصیص سریع وظایف در مقیاس بزرگ در سناریوهای پویا اعمال شود. همانطور که در شکل 3 الف نشان داده شده است، بخش های جاده بالادست مجاور یک بخش شلوغ به عنوان مناقصه گذار عمل می کنند، در حالی که بخش جاده نامزدی که وسایل نقلیه ممکن است از آن عبور کنند به عنوان یک پیشنهاد دهنده عمل می کند.
در فرآیند مذاکره خودرو-جاده چهار مرحله وجود دارد. اول مرحله اعلام تکلیف است که در آن مناقصهدهنده اعلامیههای وظیفه وسیله نقلیه را که حاوی اطلاعات وظیفه، مانند مکان و مقصد وسیله نقلیه است، برای سایر عوامل بخش جادهای کاندید در مرکز برنامهریزی تقاطع صادر میکند. مرحله دوم، مرحله مناقصه است، که در آن هر عامل بخش جاده ای نامزد، طرح های مسیریابی و قیمت های پیشنهادی (زمان سفر) را برای هر کار وسیله نقلیه که از بخش جاده ای نامزد شروع می شود، محاسبه می کند و این اطلاعات محاسبه شده را به مناقصه گزار ارائه می دهد. مرحله سوم، مرحله اعطای جایزه است، که در آن مناقصهگذار با استفاده از الگوریتم انتخاب مناقصه برنده شرح داده شده در بخش 3.2 ، طرح مسیریابی خودرو بهینه جهانی را تعیین میکند.. در نهایت، در مرحله اجرای کار، مناقصهگذار طرحها را با برنده مناقصه تأیید میکند و طرحهای تخصیص خودرو را برای همه داوطلبان داوطلب ارسال میکند.
به عنوان مثال، همانطور که در مرکز برنامه ریزی A در شکل 3 الف نشان داده شده است ، هنگامی که بخش جاده 6 پر ازدحام است، وسایل نقلیه در بخش جاده 2 که قرار است از قطعه جاده 6 عبور کنند به عنوان وظایفی در نظر گرفته می شوند که باید تعیین شوند. عامل بخش جاده 2 به عنوان مناقصه گزار و عوامل بخش جاده قابل عبور 1، 4 و 7 به عنوان مناقصه گران برای انجام وظایف وسیله نقلیه با هم رقابت می کنند. آنها طرح تخصیص وظایف خودرو را هماهنگ می کنند.
فرض کنید که مجموعه ای از وظایف وسیله نقلیه است که به یک مسیر برنامه ریزی مجدد نیاز دارد، مجموعه ای از عوامل بخش جاده در همان تقاطع به صورت نشان داده می شود. . در همین حال، مجموعه ای از عوامل راه ارتباطی همسایه است در داخل ، جایی که تعداد عوامل راه است. مجموعه منابع همسایه قابل انتقال از به عنوان مجموعه ای از عوامل جاده ای تعریف می شود که می توانند مستقیماً با آنها ارتباط برقرار کنند و در همان مرکز برنامه ریزی تقاطع. علاوه بر این، طرح بازطراحی وسیله نقلیه مناقصه دهنده از مناقصه گزار است ، و قیمت مناقصه مربوطه است. سرانجام، مجموعه ای از طرح های برنده برای عامل جاده است و وظایف وسیله نقلیه است که در آن گنجانده شده است ، .
فرآیند برنامه ریزی مجدد وسیله نقلیه ارائه شده در الگوریتم 1 با تنظیم وظایف وسیله نقلیه شروع می شود در مامور جاده دیگر نمی تواند مسیرهای اصلی را دنبال کند. ابتدا، r i آگهی های مناقصه را برای داوطلبان داوطلب منتشر می کند (خط 1). سپس، هر پیشنهاد دهنده مسیر رانندگی وسایل نقلیه را تدوین می کند و زمان سفر آنها را تعیین می کند (خطوط 3 و 4). پس از تعیین وظایف وسیله نقلیه ای که قصد دارند برای آن مناقصه کنند، سپس طرح های مسیریابی را ارسال می کند و قیمت ها ، که با استفاده از رابطه (3) قابل محاسبه است (خط 5 و 6). بعد، عامل راه مجموعه طرح های مناقصه برنده را انتخاب می کند مطابق با الگوریتم تعیین مناقصه برنده ارائه شده در الگوریتم 2 (خط 8). طرح برنامه ریزی مجدد زمانی که تمام وظایف وسیله نقلیه تکمیل شد می توان به دست آورد (خطوط 9-11). با این حال، ممکن است تعدادی خودرو باقی مانده باشد مسیرهای آن (خط 9 و 12) به دلیل محدودیتهای قابلیت حملونقل جادهای برنامهریزی نشده است. سپس وسایل نقلیه ابتکار عمل را برای تدوین طرح مسیریابی به دست خواهند گرفت زمانی که همه عوامل راه نمی توانند مسیرهای بهتری را ارائه دهند (خط 13 و 14). طرح نهایی شامل و (خط 15).
| الگوریتم 1 الگوریتم برنامه ریزی هماهنگی مبتنی بر مناقصه |
| ورودی: |
| مجموعه ای از وظایف وسیله نقلیه که نیاز به برنامه ریزی مجدد مسیر دارد |
| عوامل راه در R که نیاز به تخصیص وظایف وسیله نقلیه دارند |
| مجموعه ای از عوامل جاده همسایه r i برای مناقصه در دسترس است |
| خروجی: |
| طرح برنامه ریزی مجدد وظایف وسیله نقلیه |
| 1 اجازه دهید مناقصهگری باشد که آگهی مناقصه را برای داوطلبان داوطلب در RN منتشر میکند |
| 2 برای هر پیشنهاد دهنده که در انجام دادن |
| 3 مقصد وسایل نقلیه را بدست آورید |
| 4 محاسبه مسیرهای بهینه و زمان سفر از پیشنهاد دهنده به مقصد وسایل نقلیه |
| 5 تعیین تکلیف وسیله نقلیه برای مناقصه با توجه به وظایف وسیله نقلیه برنامه ریزی شده آنها |
| 6 طرح برنامه ریزی مجدد وظیفه مناقصه را ارسال کنید و قیمت پیشنهادی |
| 7 پایان |
| 8 مجموعه طرح مناقصه برنده را تعیین کنید با فراخوانی الگوریتم 2 |
| 9 |
| 10 اگر سپس |
| 11 طرح برنامه ریزی مجدد را برگردانید |
| 12 دیگر |
| 13 هر وسیله نقلیه در مسیر بهینه خود را به طور مستقل انتخاب می کند |
| 14 ایجاد طرح برنامه ریزی مجدد با توجه به این مسیرها |
| 15 طرح برنامه ریزی مجدد را برگردانید |
| 16 پایان اگر |
با اشاره به فرمول ارائه شده توسط Çolak و همکاران. [ 29 ]، قیمت پیشنهادی به عنوان ترکیبی خطی از هزینه زمانی که وسیله نقلیه متحمل میشود (زمان سفر فردی) و کل هزینه زمانی که بر دیگران تحمیل میشود (زمان سفر جهانی) تعریف میشود:
جایی که مجموعه ای از بخش های جاده را نشان می دهد که در مسیر نامزد k امین وسیله نقلیه در هنگام مناقصه r i گنجانده شده است. نشان دهنده زمان سفر مشاهده شده در جاده r برای جریان وسیله نقلیه است . پارامتر تعدیل را نسبت به مزایای سفر جهانی تعریف می کند که بین 0 و 1 متغیر است. یک طرح برنامه ریزی با مسیرها را با توجه به زمان سفر جهانی انتخاب می کند. برعکس، یک طرح برنامه ریزی با زمان سفر فردی را در نظر می گیرد.
سناریوهای ترافیک شهری بسیار پیچیده هستند و زمان سفر وسایل نقلیه در جاده های آزاد و شلوغ بسیار متفاوت است. بنابراین، تابع امپدانس مبتنی بر سرعت (SIF) برای تخمین زمان واقعی سفر استفاده شد [ 30 ].
جایی که نشان دهنده میانگین سرعت ترافیک آزاد و نشان دهنده سرعت خود جریان در جاده های ترافیک آزاد است. طول جاده تردد آزاد است. و دو پارامتر رگرسیونی هستند که با تابع BPR مطابقت دارند. نشان دهنده طول جاده های شلوغ و سرعت وسایل نقلیه در جاده های شلوغ با جریان وسایل نقلیه است .
3.2. الگوریتم تعیین مناقصه برنده
همه مناقصه گران طرح های مناقصه را در طی فرآیند برنامه ریزی هماهنگی به مناقصه گزار ارائه می دهند. لازم به ذکر است که طرح های مسیریابی وسیله نقلیه ارائه شده توسط مناقصه گران مختلف ممکن است شامل وظایف خودروهای مشابه باشد. با توجه به اینکه هر وسیله نقلیه فقط می تواند در یک بخش جاده تردد کند، طرح های متعدد مناقصه ممکن است باعث تضاد بین وظایف وسیله نقلیه شود. بنابراین، یک مناقصهدهنده یک طرح جهانی مسیریابی خودرو بهینه را انتخاب میکند تا از تضاد وظایف خودرو بر اساس طرحهای ارائهشده جلوگیری کند.
بنابراین، ما یک مدل برنامهنویسی عدد صحیح ساختیم که در رابطه (5) برای حل این مسئله تعیین برنده (WDP) تعریف شده است. هدف این مدل به حداقل رساندن قیمت پیشنهادی کلی (زمان سفر) طرحهای مسیریابی است.
راه حل مدل را می توان به عنوان یک مجموعه بولی بیان کرد که در آن = 1 به این معنی است که طرح مناقصه به عنوان طرح برنده انتخاب می شود و تعداد مناقصه گران است. بنابراین، تابع هدف را می توان به صورت زیر بیان کرد:
جایی که منفعت مناقصه ک امین مناقصه گر است.
محدودیت ها به صورت زیر مشخص می شوند: (1) و (2) . عملیات ⊕ به صورت زیر تعریف می شود: اگر ، ، و طرح مناقصه با طرح مناقصه در تضاد است (یعنی ) سپس داریم . در غیر این صورت ، . محدودیت دوم (2) نشان می دهد که دو طرح مناقصه نمی توانند در تضاد باشند.
برای تعیین طرحهای مناقصه برنده، یک الگوریتم جستجوی محلی مبتنی بر مجموعه اولویت (PLS) (الگوریتم 2) را پیشنهاد کردیم که به تدریج از طریق جستجوهای تکراری متعدد به راهحل بهینه نزدیک میشود. در هر تکرار، الگوریتم طرح پیشنهادی B min را با کمترین قیمت پیدا کرده و به راه حل نامزد اضافه می کند. . طرح های مناقصه ای که با از راه حل کاندید حذف می شوند . علاوه بر این، مجموعه طرح مناقصه که با راه حل نامزد در تضاد نیست برای بهبود کارایی جستجو، ابتدا در هر تکرار جستجو می شود. علاوه بر این، الگوریتم می تواند با جستجوی طرح پیشنهادی در یک بازه قیمت ثابت، احتمال سقوط به یک بهینه محلی را کاهش دهد (به عنوان مثال، ) در هر تکرار.
به طور خاص، در طول هر تکرار، الگوریتم PLS جستجوی مجموعه طرحهای پیشنهادی غیر متضاد را در اولویت قرار داد. . طرح مناقصه با کمترین قیمت پیشنهادی در به راه حل کاندید اضافه شد (خط 4). در مقابل، اگر هیچ طرحی در آن وجود نداشته باشد ، الگوریتم راه حل کاندید را به روز می کند از طریق مراحل زیر با احتمال داده شده ، الگوریتم ابتدا حداقل قیمت پیشنهادی را تعیین می کند در مجموعه جستجوی موقت (خط 8). طرح مناقصه تنظیم شده است انتخاب شد از در بازه قیمت ) (خط 9). همانطور که در رابطه (6) نشان داده شده است، جایگزینی مقدار حداقل با فاصله حداقل مقدار برای حل نامزد مفید است. در اجتناب از تله بهینه محلی. علاوه بر این، یک طرح به طور تصادفی از مجموعه طرح انتخاب شد برای افزودن به راه حل نامزد (خط 10 و 14).
علاوه بر این، الگوریتم راه حل نامزد را به روز می کند از طریق رابطه تعارض بین و (خط 15). در نهایت، بهترین طرح مناقصه در صورت قیمت کل به روز می شود کوچکتر از آن است (خط 17 و 18). در پایان هر تکرار، مجموعه جستجوی اولویت P B نیز با توجه به رابطه تضاد بین به روز می شود و (خط 20).
| الگوریتم 2 الگوریتم جستجوی محلی مبتنی بر مجموعه اولویت |
| ورودی : |
| S مجموعه ای از طرح های مناقصه ارائه شده از همه مناقصه گران |
| V قیمت مناقصه تعیین شده است |
| ρ پارامتر احتمال در (0،1) |
| σ پارامتر فاصله قیمت پیشنهادی |
| خروجی: |
| بهترین طرح تخصیص وظایف وسیله نقلیه |
| 1 مجموعه طرح های جستجوی اولویت را راه اندازی کنید = |
| 2 در حالی که تغییر در دو تکرار مجاور |
| 3 اگر سپس |
| 4 |
| 5دیگر |
| 6 مجموعه طرح موقت |
| 7با احتمال انجام دادن |
| 8 حداقل قیمت را تعیین کنید طرح های مناقصه در TemB |
9 مجموعه طرح پیشنهادی را انتخاب کنید از جانب
در بازه قیمت شناور . |
| 10 طرح را انتخاب کنید به طور تصادفی از |
| 11 در غیر این صورت |
| 12 طرح t را انتخاب کنید به طور تصادفی از |
| 13 انجام شد |
| 14 |
| 15 به روز رسانی : حذف طرح پیشنهادی که با آن در تضاد است از جانب |
| 16 پایان اگر |
| 17 اگر قیمت کل از کوچکتر از آن است سپس |
| 18 |
| 19پایان اگر |
| 20 P B را با توجه به رابطه تضاد بین به روز کنید و . |
| 21پایان در حالی که |
| 22 بازگشت |
4. مطالعه موردی
4.1. شبیه سازی مورد آزمایش
برای اندازهگیری عملکرد و ویژگیهای روشهای مختلف برنامهریزی مسیر، ما یک سناریوی ترافیکی شبیهسازیشده با محوریت انحراف ترافیک با استفاده از شبکه تاییدی Nguyen ( بخش 4.1.1 ) راهاندازی کردیم. کارایی حمل و نقل شبکه ( بخش 4.1.2 ) و نرخ بهره برداری از جاده ( بخش 4.1.3 ) طرح های مسیریابی مختلف به دست آمده با روش های برنامه ریزی مختلف در این سناریو مقایسه شد که منجر به آشکار شدن ویژگی ها و کاربرد روش های مختلف برنامه ریزی شد.
4.1.1. تنظیمات آزمایشی
در این آزمایش، از شبکه جاده ای نگوین برای بررسی اثربخشی روش BDRP پیشنهادی استفاده شد. شبکه نگوین در اصل توسط نگوین [ 31 ] به عنوان یک مورد تحقیق ترافیک کلاسیک پیشنهاد شد. با وجود سادهسازی شبکه جادهای، شبکه نگوین ویژگیهای ساختاری یک شبکه جادهای واقعی، از جمله تقاطعها، تقاطعهای T و مسیرهای دوطرفه را حفظ میکند. اغلب برای شبیه سازی سناریوهای ترافیکی ساده استفاده می شود تا فرآیند پویا جریان ترافیک را بدون تداخل خارجی آشکار کند. همانطور که در شکل 4 نشان داده شده است، شبکه نگوین از 13 گره و 38 بخش جاده دو طرفه تشکیل شده است. در این آزمایش، تقاضای ترافیک اولیه به طور تصادفی در هر بخش جاده تنظیم شد. چهار گره در لبه شبکه به عنوان مقصد سفر برای شبیه سازی توزیع جریان ترافیک واقعی در نظر گرفته شدند. پارامترهای شبیه سازی در جدول 1 فهرست شده اند .
شش روش برنامه ریزی مسیر زیر شامل سه روش برنامه ریزی مسیر استاتیک و سه روش برنامه ریزی مسیر پویا به عنوان روش های مقایسه در این آزمایش استفاده شد. روشهای برنامهریزی مسیر استاتیک شامل روش کوتاهترین مسیر استاتیک (SSP)، روش کوتاهترین مسیر top-K (TSP) و روش کوتاهترین مسیر مبتنی بر مدل لاجیت (LSP) است. روش SSP مسیرها را برای همه وسایل نقلیه طبق الگوریتم کوتاهترین مسیر A* برنامه ریزی می کند. هنگامی که طرح های مسیریابی مشخص شد، آنها در طول سفر بعدی وسایل نقلیه تغییر نخواهند کرد [ 32 ]. برای جلوگیری از ازدحام جاده ناشی از کوتاه ترین مسیر، روش TSP یکی از مسیرهای بهینه K بین OD را به عنوان یک طرح مسیریابی بر اساس یک احتمال داده شده پس از تعیین آنها انتخاب می کند [ 33 ]، 34 ]. با این حال، در یک سناریوی واقعی سفر، معمولاً انحراف خاصی بین هزینه درک شده مسافران و هزینه واقعی مسیر وجود دارد. روش LSP، که فرض میکند این انحراف تابع توزیع Gumbel (یک توزیع مقدار شدید) است، به طور گسترده در برنامهریزی مسیر استفاده شده است [ 35 ].
علاوه بر این، سه روش برنامهریزی مسیر پویا گنجانده شد: روش برنامهریزی مسیر پویا سلسله مراتبی (HDP)، روش مسیریابی بهینهسازی زمان (TOR) از طریق مکانیسم زمان مدلسازی، و روش کوتاهترین مسیر پویا (DSP). روش HDP کوتاهترین مسیر را با محاسبه پایانهها در وسایل نقلیه محاسبه میکند و سلسله مراتب جاده و ناحیه مسیریابی را برای بهبود کارایی محاسبه تقسیم میکند [ 36 ]. روش TOR زمان سفر وسیله نقلیه را به دقت محاسبه می کند. از آن برای برنامه ریزی مسیر بهینه زمانی استفاده می شود [ 13 ]. این روش ظرفیت عبور سریع همه خودروها را بهبود می بخشد. علاوه بر این، روش DSP مسیرهای همه وسایل نقلیه را با توجه به الگوریتم کوتاهترین مسیر در هر مرحله زمانی گسسته جایگزین میکند [ 37 ]]. روش طراحی مسیر پویا کلاسیک نیز در این آزمایش مقایسه شد.
4.1.2. مقایسه کارایی انتقال شبکه بین طرحهای مسیریابی مختلف
راندمان ترافیک طرح های مسیریابی مختلف به طور قابل توجهی متفاوت است. همانطور که در شکل 5 الف نشان داده شده است، تعداد وسایل نقلیه باقیمانده در شبکه جاده در این سناریوی شبیه سازی شده با 1560 وسیله نقلیه اولیه با افزایش زمان به تدریج کاهش می یابد. همه طرحهای مسیریابی میتوانند به سرعت وسایل نقلیهای را که در نزدیکی مقصد هستند به مقصدشان در مرحله اولیه شبیهسازی هدایت کنند (گام زمانی tr< 80). با این حال، در مرحله میانی شبیهسازی، طرحهای مسیریابی سه روش استاتیک باعث ازدحام ترافیک شد، زیرا نتوانستند مسیرها را دوباره تنظیم کنند. راندمان ترافیک روش های استاتیک شروع به کاهش کرد. در حالی که روشهای HDP، TOR، و BDRP راندمان ترافیک بالایی را حفظ کردند. سه روش پویا، HDP، TOR و BDRP، تمام وظایف وسیله نقلیه را به ترتیب در 228 × 30 ثانیه، 192 × 30 ثانیه و 123 × 30 ثانیه تکمیل می کنند که بسیار سریعتر از روش های دیگر است. علاوه بر این، فاصله خطا (منطقه سایه در شکل 5 الف) طرح مسیریابی نشان می دهد که همه روش ها دارای بازده ترافیک نسبتاً پایداری هستند.
برای تأیید پایداری و اثربخشی همه روشها در تعداد اولیه مختلف وسایل نقلیه، این آزمایش زمان سفر وسیله نقلیه را از طریق 10 گروه دادههای تقاضای ترافیک با تعداد اولیه مختلف وسایل نقلیه مقایسه میکند. همانطور که در شکل 5 ب نشان داده شده است، زمان کلی سفر همه روش ها با افزایش تعداد اولیه وسایل نقلیه، یک روند صعودی ثابت و پایدار را نشان می دهد. علاوه بر این، راندمان ترافیک روشهای برنامهریزی مسیر پویا به طور قابلتوجهی بهتر از روشهای استاتیک است. به طور خاص، زمان سفر کلی روش SSP به طور خطی با تعداد اولیه وسایل نقلیه مرتبط است، در حالی که زمان سفر روش LSP به صورت محلی ناپایدار است. در مقابل، روش BDRP راندمان حمل و نقل بهینه را در همه موارد ارائه کرد.
علاوه بر این، این آزمایش زمان اجرای این روش ها را با مقیاس های مختلف خودرو مقایسه می کند. یک گره مرکز برنامه ریزی متمرکز واحد با استفاده از یک کامپیوتر با پردازنده Intel Xeon 2.7 گیگاهرتز و حافظه 16 گیگابایتی شبیه سازی شد، در حالی که گره های محاسباتی توزیع شده با استفاده از چندین کامپیوتر با پردازنده Intel Core 1.0 گیگاهرتز و حافظه 8 گیگابایت شبیه سازی شدند. زمان اجرای روش های برنامه ریزی ایستا یک زمان محاسبه واحد است، در حالی که زمان اجرای روش برنامه ریزی پویا مجموع زمان اجرا در هر مرحله زمانی است. از طریق یک چارچوب برنامه ریزی توزیع شده، گره های محاسباتی متعدد در روش های HDP و BDRP مسیرها را به صورت پویا و همزمان در هر مرحله زمانی مجدداً برنامه ریزی می کنند. بنابراین، زمان اجرا T Rاز روش های HDP و BDRP مجموع طولانی ترین زمان اجرا در هر مرحله زمانی است (معادله (7)).
جایی که مجموعه ای از زمان های سپری شده برای همه گره های محاسباتی برای برنامه ریزی مجدد مسیرها در طول تکرار i است که در آن تعداد گره های محاسباتی و تعداد تکرار است.
همانطور که در شکل 6 نشان داده شده است ، زمان اجرای تمام روش های برنامه ریزی مسیر با اندازه اولیه وسیله نقلیه همبستگی مثبت دارد. با این وجود، برنامه ریزی مجدد مسیر در هر مرحله زمانی باعث ایجاد شکاف بزرگی در کارایی محاسباتی بین روش های برنامه ریزی مسیر پویا و استاتیک می شود. با بهره مندی از یک محاسبه واحد، هر سه روش برنامه ریزی ایستا می توانند طرح های مسیریابی را در زمان بسیار کوتاهی فرموله کنند، در حالی که هر دو روش TOR و DSP هزینه زمان محاسباتی زیادی را برای برنامه ریزی مسیر پویا به دلیل حالت برنامه ریزی متمرکز خود تجربه می کنند ( جدول 2).). با این حال، روش های BDRP و HDP به طور قابل توجهی زمان مورد نیاز برای برنامه ریزی مسیر پویا از طریق گره های محاسباتی توزیع شده را کاهش می دهند. اگرچه زمان اجرای روش BDRP کمی بیشتر از روش HDP است، اما طرح مسیریابی آن به طور قابل توجهی کارایی حمل و نقل شبکه جاده را بهبود می بخشد. به طور کلی، روش BDRP به تعادلی بین بازده محاسباتی و کیفیت طرح مسیریابی دست می یابد.
4.1.3. مقایسه نرخ بهره برداری جاده بین روش های مختلف
این آزمایش فرآیند تغییر نرخ بهره برداری از جاده های محلی را تحت روش های مختلف برنامه ریزی مسیر مورد بررسی قرار داد تا دلایل تفاوت در کارایی ترافیک بین چندین طرح برنامه ریزی مسیر را آشکار کند. نرخ بهره برداری از جاده به عنوان نسبت تعداد وسایل نقلیه در یک بخش جاده و ظرفیت جاده در واحد زمان تعریف می شود.
جایی که تعداد وسایل نقلیه در بخش جاده است و ظرفیت جاده بخش جاده است در واحد زمان
همانطور که در شکل 4 نشان داده شده است ، تقاطع 6 در مرکز شبکه نگوین قرار دارد که یک نقطه همگرایی مهم جریان ترافیک در شبکه جاده است. استراتژی های تخلیه جریان ترافیک در مقیاس بزرگ در تقاطع 6 می تواند تفاوت های دقیق در طرح های مسیریابی را منعکس کند. در همین حال، در شکل 7 ، فرآیند تغییر نرخ بهره برداری از چهار بخش جاده (جاده های 7، 11، 22 و 25) را که در مجاورت گره 6 قرار دارند، شناسایی کردیم. هنگامی که ازدحام در قطعه جاده 7 رخ می دهد، روش های برنامه ریزی مسیر پویا می توانند طرحهای مسیریابی برای وسایل نقلیهای که قرار است از بخش جادهای پر ازدحام عبور کنند، دوباره برنامهریزی کنید.
نتیجه آزمایشی در شکل 8 نشان داده شده است ، که در آن تعداد زیادی از وسایل نقلیه اولیه باعث ازدحام ترافیک در بخش جاده 7 شده است. ) در مرحله اولیه سپس، چهار روش برنامهریزی مسیر پویا، وسایل نقلیه را به سرعت به بخشهای جادهای 11، 22 و 25 هدایت کردند که منجر به افزایش نرخ بهرهبرداری از این بخشها شد. روش BDRP چندین بخش جاده را برای برنامه ریزی مجدد طرح های مسیریابی برای وسایل نقلیه که از ظرفیت حمل و نقل چهار بخش جاده استفاده کامل می کرد، هماهنگ کرد. بنابراین، وسایل نقلیه همگرا به گره متراکم به سرعت تخلیه شدند (110 ثانیه). اگرچه روشهای HDP و TOR نیز به صورت پویا وسایل نقلیه را به بخشهای جادهای 11 و 22 اختصاص میدهند، استراتژی بهینه فردی باعث میشود که قطعه جاده 25 خالی بماند، که زمان تخلیه وسیله نقلیه را در این تقاطع شلوغ طولانیتر کرد. علاوه بر این، سه روش ایستا از ظرفیت حمل و نقل جاده های 11، 22 و 25 استفاده نکردند.
4.2. نمونه برنامه
در این آزمایش، اثربخشی روش BDRP در یک سناریوی ترافیک شهری واقعی با توجه به سوابق سفر ساکنان شهر ووهان چین تأیید شد. بافت ترافیک شهری و دادههای تقاضای سفر در منطقه مورد مطالعه، و همچنین کارایی ترافیک طرح مسیریابی بهدستآمده با روش BDRP، در بخشهای فرعی زیر بیشتر تحلیل میشوند.
4.2.1. شرح منطقه مطالعه
منطقه تجاری Hankou در ووهان، چین، به عنوان منطقه تحقیقاتی در این آزمایش برای تأیید روش BDRP در یک شبکه جاده واقعی انتخاب شد. این منطقه تجاری در منطقه مرکزی ووهان است، جایی که یک جریان ترافیک در مقیاس بزرگ اغلب باعث ازدحام ترافیک می شود. منطقه مورد مطالعه شامل 1596 بخش جاده و 1062 تقاطع است ( شکل 9 ). در سناریوی شبیه سازی این آزمایش، هر عامل بخش جاده دارای قابلیت پردازش اطلاعات و محاسبات است. پارامترهای شبیه سازی در جدول 3 آمده است. علاوه بر این، مسیر تاکسی ها در منطقه Hankou در 1 مه 2014 با شبکه جاده در این آزمایش مطابقت داده شد. در نهایت، نقاط اصلی و مقصد همه مسیرها به عنوان تقاضای ترافیک استخراج شد.
4.2.2. کارایی حمل و نقل شبکه راه ها
روش BDRP برای برنامهریزی طرحهای مسیریابی پویا وسیله نقلیه، که به صورت مکانی و زمانی مورد تجزیه و تحلیل قرار گرفتند، استفاده شد. از منظر فضایی، نتایج آمار ترافیک بهدستآمده از قرار دادن تمام مسیرها در شبکه جادهای در شکل 10 نشان داده شده است (تعداد وسایل نقلیه = 1400). از شکل، آشکار است که جریان ترافیک به طور قابل توجهی در بخشهای جادهای با سلسله مراتب بالا، که ظرفیت ترافیکی بیشتر و هزینههای سفر کمتری دارند، القا شده است. طرحهای برنامهریزی مسیر به طور موثری کارایی کلی ترافیک و تجربه رانندگی افراد را بهبود میبخشد. در این میان، توزیع ترافیک در یک شبکه جادهای با سلسله مراتب پایین نسبتاً متعادل است که احتمال تراکم جادهها را تا حدی کاهش میدهد.
برعکس، از منظر زمانی، وسایل نقلیه باقیمانده در شبکه جاده به تدریج با افزایش زمان شبیهسازی کاهش مییابند ( شکل 11 a). با این حال، تعداد کمی از وسایل نقلیه با مسافت های طولانی تر، زمان پایان سناریوی کلی سفر را به تاخیر انداختند. بیش از 95 درصد وسایل نقلیه در 50 × 30 ثانیه به مقصد خود رسیدند. علاوه بر این، بین اندازه وسیله نقلیه و زمان کلی سفر همبستگی مثبت و معناداری وجود داشت. زمان کلی سفر روش BDRP با افزایش اندازه اولیه وسیله نقلیه به طور مداوم افزایش می یابد. همانطور که در شکل 11 نشان داده شده استالف، زمانی که تعداد اولیه وسایل نقلیه در شبکه جاده ها 600 بود، 1770 ثانیه (30 × 59) طول کشید تا کار سفر همه وسایل نقلیه تکمیل شود. در مقابل، زمانی که تعداد اولیه وسایل نقلیه به 1400 رسید، زمان کلی سفر به 2490 ثانیه افزایش یافت.
در سناریوهای ترافیک شهری شبیه سازی شده، طرح مسیریابی بهینه جهانی معمولاً یک نتیجه ایده آل است. در عمل، رانندگان هنگام انتخاب مسیر، مزایای فردی و جهانی را ارزیابی می کنند [ 29 ]. برای تأیید عملکرد روش پیشنهادی در موقعیتهای مختلف، بازده ترافیک را تحت نسبتهای مختلف بین شرایط بهینه فردی و جهانی مقایسه کردیم ( شکل 11 ب). نتایج نشان میدهد که با افزایش نسبت وسایل نقلیه که مسیرهای بهینه فردی را انتخاب میکنند ( ω← 0)، سیستم جاده ای زمان بیشتری برای حمل و نقل همه وسایل نقلیه (131 × 30 ثانیه) صرف می کند. یعنی راندمان ترافیک جهانی نسبتاً پایینتر میشود که به روش TOR نزدیکتر است (155 × 30 ثانیه). برعکس، اگرچه وسایل نقلیه ای که مزایای سفر جهانی را در نظر می گیرند ممکن است زمان سفر بیشتری را صرف کنند، بازده کلی ترافیک سیستم جاده ای تقریباً 45٪ در مقایسه با حالت ω → 0 (72 × 30 ثانیه) بهبود می یابد. در نتیجه، این روش استراتژی های انتخاب مسیر بهینه فردی و سیستمی را متعادل می کند که نشان دهنده عملکرد بالا در هر دو مورد است.
روش BDRP با تنظیم مداوم مسیرهای وسایل نقلیه تحت تأثیر ازدحام در حین حرکت وسایل نقلیه، کارایی ترافیک شبکه های جاده ای را بهبود بخشید. در این آزمایش، روش BDRP بیش از 3000 مسیر را از برنامه ریزی مجدد برای وسایل نقلیه از طریق برنامه ریزی مسیر پویا انجام داد. = 1400). مقایسه هزینه های سفر قبل و بعد از هر برنامه ریزی مجدد مسیر در شکل 12 نشان داده شده است که از طریق تحلیل رگرسیون همبستگی مثبت و معناداری را نشان می دهد. هزینه سفر در مراحل اولیه و میانی برنامه ریزی مجدد مسیر نسبتاً ثابت بود، در حالی که هزینه سفر جهانی در مرحله بعدی برنامه ریزی مجدد مسیر به طور قابل توجهی افزایش یافت، به این معنی که بسیاری از وسایل نقلیه به همان مقصد نزدیک بودند که منجر به تراکم ترافیک می شود. در نتیجه، زمان سفر پس از برنامه ریزی مجدد مسیر به طور متوسط 32.71٪ کاهش می یابد، که تا حد زیادی کارایی ترافیک شبکه جاده منطقه هانکو را بهبود می بخشد.
5. بحث
ماهیت روشهای برنامهریزی مسیر فردی موجود برای CV، طراحی خودخواهانه مسیری با کوتاهترین زمان سفر فردی [ 38 ]، از جمله مسیرهای ایستا [ 13 ] و پویا [ 38 ] کوتاهترین زمان است. روشهای برنامهریزی مسیر غیرهمکاری، کارایی کلی سفر را کاهش میدهد. در روش پیشنهادی ما، فرآیند مناقصه، که یک مکانیسم مذاکره چند شرکتکننده است، به طور خلاقانه با عوامل بخش جادهای متعدد برای تدوین طرحهای مسیریابی خودرو بر اساس مدل مرکز برنامهریزی تقاطع جادهای همکاری میکند. شبیهسازی و موارد واقعی ارائهشده در بخشهای قبلی پتانسیل بارز روش طرحریزی مسیر پویا برای بهبود کارایی ترافیک شبکههای جادهای را نشان میدهد ( شکل 5).و شکل 12 ). در مقایسه با مسیرهای بهینه فردی که توسط وسایل نقلیه به طور مستقل به دست آمده است، این روش مذاکره محلی به طور قابل توجهی کارایی کلی ترافیک شبکه جاده را بهبود می بخشد و زمان سفر را به طور متوسط 32.71٪ کاهش می دهد. ما یک روش برنامهریزی مسیر مشارکتی جدید برای CV ارائه میکنیم، که برنامهریزی هماهنگ شده جریان ترافیک شهری در مقیاس بزرگ را در سناریوهای حملونقل هوشمند ممکن میسازد. با این حال، روش پیشنهادی ممکن است هزینه سفر برخی از افراد را افزایش دهد که به دلیل تضاد طبیعی بین بهینه فردی و جهانی اجتناب ناپذیر است. با این وجود، هزینه های سفر فردی و کلی را می توان با تنظیم پارامترهای وزن تابع سود متعادل کرد.
نتایج تجزیه و تحلیل تجربی نشان می دهد که مدل پیشنهادی پیشنهادی می تواند به طور موثر ازدحام ترافیک ناشی از حوادث جزئی را کاهش دهد ( شکل 5).). علاوه بر این، در مورد اختلالات عمده در مناطق محلی، مانند حوادث ترافیکی جدی، مدل مناقصه همچنان میتواند وسایل نقلیه را در جادههای شلوغ به جادههای دیگر هدایت کند تا فشار ترافیک محلی کاهش یابد. با این حال، زمانی که اختلالات عمده، مانند رویدادهای شدید آب و هوایی و زلزله، کل شبکه جادهها را تهدید میکند، مدل پیشنهادی ممکن است به دلیل ناکارآمدی کل سیستم ترافیک، ترافیک را به راحتی هدایت نکند، اما یک طرح مسیر بهینه را در وضعیت فعلی تشخیص میدهد. تا حد امکان از تراکم ترافیک مداوم جلوگیری شود. در نتیجه، مدل پیشنهادی ظرفیتی را برای مقابله با تراکم ترافیک ناشی از اختلالات عمده نشان میدهد و اثربخشی آن تا حد زیادی توسط مقیاس فضایی چنین اختلالاتی تعیین میشود.
علاوه بر این، مورد شبیهسازی مزایای روش پیشنهادی را در مورد بازده محاسباتی نشان میدهد ( شکل 6 ). شبکه جاده توسط تقاطع ها به مراکز برنامه ریزی متعددی تقسیم شد که می توانند به طور مستقل طرح های مسیریابی را برای وسایل نقلیه داخلی خود تدوین کنند. این فشار مسیرهای برنامه ریزی برای جریان ترافیک در مقیاس بزرگ را پراکنده می کند. علاوه بر این، یک الگوریتم تعیین مناقصه برنده کارآمد برای تحقق یک انتخاب سریع از طرحهای مسیریابی نهایی از چندین نامزد پیشنهاد شده است. این اقدامات برای بهبود کارایی محاسباتی روش پیشنهادی مفید هستند.
6. نتیجه گیری
در سال های اخیر، محققان درگیر در مطالعات برنامه ریزی مسیر به طور فزاینده ای به وسایل نقلیه خودکار [ 16 ، 17 ] و CVs [ 36 ] علاقه مند شده اند.]. پیشرفت قابل توجهی در هر حوزه به طور جداگانه انجام شده است. با این حال، بهبود کارایی کلی ترافیک تحت سناریوی اتصال خودرو هنوز چالش برانگیز است. در این مطالعه، یک روش جدید برنامهریزی هماهنگی خودرو-جاده مبتنی بر مناقصه برای پرداختن به این چالش و تدوین مؤثر طرحهای مسیری که زمان سفر فردی و کارایی ترافیک جهانی را متعادل میکند، پیشنهاد شد. ما مدل مرکز برنامهریزی تقاطع جادهای را تعریف کردیم و بهطور مبتکرانه مکانیزم مناقصه را برای همکاری با عوامل بخش جاده معرفی کردیم، که بهطور مشهودی برای بهبود کارایی ترافیک مفید است. علاوه بر این، یک الگوریتم بهینهسازی جستجوی محلی جدید برای تعیین موثر طرحهای مسیریابی برنده در فرآیند مذاکره پیشنهاد شد. مطالعات موردی پتانسیل کاربردی مکانیسم پیشنهاد در ادغام چندین گره محاسباتی توزیع شده را نشان می دهد. روش پیشنهادی می تواند هزینه کلی سفر سیستم های حمل و نقل شهری را کاهش دهد و در عین حال کارایی محاسباتی بالایی را حفظ کند. این یافتهها اهمیت بهبود کارایی حملونقل شبکههای جادهای شهری را برای کاهش تراکم ترافیک شهری و مدیریت تصادفات نشان میدهد. این مطالعه کارایی جهانی سیستم های حمل و نقل شهری را بهبود می بخشد و توسعه هوشمند سیستم های اطلاعات جغرافیایی شهری را ارتقا می دهد. این مطالعه همچنین می تواند کمک مثبتی به اکتشاف استفاده از وسایل نقلیه خودران در سناریوهای ترافیک واقعی داشته باشد. روش پیشنهادی می تواند هزینه کلی سفر سیستم های حمل و نقل شهری را کاهش دهد و در عین حال کارایی محاسباتی بالایی را حفظ کند. این یافتهها اهمیت بهبود کارایی حملونقل شبکههای جادهای شهری را برای کاهش تراکم ترافیک شهری و مدیریت تصادفات نشان میدهد. این مطالعه کارایی جهانی سیستم های حمل و نقل شهری را بهبود می بخشد و توسعه هوشمند سیستم های اطلاعات جغرافیایی شهری را ارتقا می دهد. این مطالعه همچنین می تواند کمک مثبتی به اکتشاف استفاده از وسایل نقلیه خودران در سناریوهای ترافیک واقعی داشته باشد. روش پیشنهادی می تواند هزینه کلی سفر سیستم های حمل و نقل شهری را کاهش دهد و در عین حال کارایی محاسباتی بالایی را حفظ کند. این یافتهها اهمیت بهبود کارایی حملونقل شبکههای جادهای شهری را برای کاهش تراکم ترافیک شهری و مدیریت تصادفات نشان میدهد. این مطالعه کارایی جهانی سیستم های حمل و نقل شهری را بهبود می بخشد و توسعه هوشمند سیستم های اطلاعات جغرافیایی شهری را ارتقا می دهد. این مطالعه همچنین می تواند کمک مثبتی به اکتشاف استفاده از وسایل نقلیه خودران در سناریوهای ترافیک واقعی داشته باشد. این مطالعه کارایی جهانی سیستم های حمل و نقل شهری را بهبود می بخشد و توسعه هوشمند سیستم های اطلاعات جغرافیایی شهری را ارتقا می دهد. این مطالعه همچنین می تواند کمک مثبتی به اکتشاف استفاده از وسایل نقلیه خودران در سناریوهای ترافیک واقعی داشته باشد. این مطالعه کارایی جهانی سیستم های حمل و نقل شهری را بهبود می بخشد و توسعه هوشمند سیستم های اطلاعات جغرافیایی شهری را ارتقا می دهد. این مطالعه همچنین می تواند کمک مثبتی به اکتشاف استفاده از وسایل نقلیه خودران در سناریوهای ترافیک واقعی داشته باشد.
در کار آینده، ما بر روی استراتژیهای برنامهریزی مسیر در سناریوهای سفر هیبریدی با وسایل نقلیه خودمختار و انسان محور تمرکز خواهیم کرد و اختلالات مسیر رانندگی ناشی از عدم قطعیت رفتارهای سفر انسان را بررسی خواهیم کرد. انتظار میرود طرحهای مسیریابی بهینه دارای خروجی پایداری تحت معماری هماهنگی خودرو-زیرساخت برای مقابله با اختلالات مربوط به رفتار تصادفی رانندگی انسان باشد.















بدون دیدگاه