1. مقدمه
داده های مسیر کشتی عمدتاً به داده های سیستم شناسایی خودکار (AIS) اشاره دارد. AIS یک فناوری رادیویی پیشرفته است که سیستم موقعیتیابی جهانی (GPS)، فرکانس بسیار بالا (VHF) و فناوری پردازش داده را ترکیب میکند تا نهادهای دریایی مختلف را قادر میسازد تا اطلاعات مربوطه را در قالبی کاملاً تعریف شده مبادله کنند. این ممکن است تبادل ساده موقعیت، مسیر، سرعت و اطلاعات هویتی بین شناورهای منفرد یا تبادل اطلاعات پیچیدهتر بین تجهیزات حرفهای ساحل و تجهیزات موقعیتیابی شناور باشد [ 1 ، 2 ]]. AIS نقش مهمی در جلوگیری از برخورد کشتی، تبادل اطلاعات، نظارت دریایی و غیره ایفا می کند. استفاده صحیح از آن به تقویت ایمنی زندگی در دریا، بهبود ایمنی و کارایی ناوبری و حفاظت از محیط زیست دریایی کمک می کند [ 3 ].
داده های AIS دارای اطلاعات زمانی و مکانی هستند و حجم اطلاعات بسیار زیاد است. تنها در بخشهای پاییندست رودخانه یانگ تسه، هر روز نزدیک به 100 میلیون قطعه داده AIS تولید میشود که نمونهای از دادههای بزرگ مکانی و زمانی است. با توجه به ویژگیهای دادههای بزرگ فضایی و زمانی AIS، از طریق تجسم و تجزیه و تحلیل، AIS میتواند مسیرها و آمار کشتیها را ردیابی کند و جریان ترافیک کشتی، جریان محموله و غیره را تجزیه و تحلیل کند. 4 ]. در حال حاضر، تجزیه و تحلیل و تحقیق داده های بزرگ AIS به تدریج به یک نقطه داغ و چالش در زمینه تحقیقات دریایی تبدیل شده است [ 5 ، 6 ، 7 ، 8 .]. هوانگ و همکاران [ 9 ] عمدتاً فشرده سازی و تجسم مسیرهای کشتی بزرگ و اجرای شتاب واحد پردازش گرافیکی (GPU) آنها را مورد مطالعه قرار داد. ژو و همکاران [ 10 ] یک روش طبقه بندی کشتی را بر اساس خوشه بندی رفتار با تجزیه و تحلیل داده های AIS بندر پیشنهاد کرد. وانگ و همکاران [ 11 ] یک روش مدلسازی شناسایی سیستم برای حرکت مانور کشتی بر اساس ماشینهای بردار پشتیبان (SVM) پیشنهاد کرد. این مطالعات یا بر نحوه نمایش واضح داده های مسیر AIS تمرکز می کنند یا بر تجزیه و تحلیل ویژگی های رفتاری کشتی در پشت داده ها تمرکز می کنند. اگرچه نتایج مشخصی به دست آمده است، اما این دو از نظر ارگانیک متحد نیستند.
بنابراین، این مقاله یک روش تجزیه و تحلیل بصری را با ترکیب چند نما برای کشف و تجزیه و تحلیل الگوهای رفتار کشتی پیشنهاد میکند. روش در این مقاله به طور عمده به چهار بخش تقسیم می شود: پیش پردازش داده های مسیر کشتی بر اساس الگوریتم فشرده سازی داده های مسیر که ویژگی های حرکت کشتی را در نظر می گیرد. نمایش و پخش مجدد مسیرهای کشتی بر اساس سیستم نمودار الکترونیکی (ECS)، پیشنهاد یک الگوریتم تشخیص برای نقاط ماندن کشتی بر اساس اصل چگالی مکانی-زمانی برای برچسبگذاری معنایی مسیرهای کشتی. با استفاده از الگوریتم اندازهگیری شباهت تابخوردگی سریع دینامیکی (FastDTW) [ 12 ] و نقاط ترتیب برای شناسایی الگوریتم خوشهبندی چگالی ساختار خوشهبندی (OPTICS) [ 13 ،14 ] برای خوشهبندی مسیرهای کشتی برای نشان دادن تفاوتها و شباهتها بین جریانهای ترافیک کشتی. نمایش نقشه حرارتی کشتی بر اساس اصل چگالی هسته و نمایش مستقیم روند توزیع و چگالی کشتی.
بقیه این مقاله به شرح زیر سازماندهی شده است. در بخش 1 ، کارهای مرتبط مورد بحث قرار گرفته است. در بخش 2 ، یک نمای کلی از سیستم ارائه شده است. در بخش 3 ، داده ها و روش پیشنهادی به تفصیل توضیح داده شده است. در بخش 4 ، اجزای بصری و ابزارهای تعاملی برای تجزیه و تحلیل رفتار کشتی ارائه شده است. در بخش 5 ، یک مطالعه موردی از مصب رودخانه یانگ تسه انجام شده و نتایج تجزیه و تحلیل می شوند. در نهایت، بخش 6 مقاله را با توصیه هایی برای تحقیقات بیشتر به پایان می رساند.
2. کارهای مرتبط
2.1. تجسم داده های مسیر
با استفاده گسترده از تجهیزات AIS کشتی، روش های بیشتری برای تجزیه و تحلیل آماری داده های AIS در مقیاس بزرگ وجود دارد. از آنجایی که دادههای مسیر کشتی، دادههای بزرگ مکانی-زمانی معمولی هستند، که حاوی اطلاعات پیچیده زمانی و جغرافیایی هستند، ابزارها و روشهای تجسم کارآمد برای کمک به افراد در تجزیه و تحلیل دادههای مسیر مورد نیاز است.
ویلمز و همکاران [ 15 ، 16 ] و Scheepens و همکاران. [ 17 ] استفاده از نقشههای چگالی را برای بررسی تعاملی ویژگیهای دادههای مسیر کشتی و تحلیل حرکت کشتی پیشنهاد کرد. نتایج تجربی نشان داد که آنها در تشخیص عروق غیر طبیعی موثر هستند. با این حال، این روش نیاز بالایی به عملکرد سخت افزار دارد. وانگ و همکاران [ 18 ] یک ابزار تحلیل تجسم مسیر تعاملی پیشنهاد کرد و اثربخشی آن را در تشخیص الگوهای حرکت کشتی و فعالیتهای غیرقانونی بالقوه اثبات کرد و اشاره کرد که محیط تجزیه و تحلیل بصری ابزار نسبتاً ساده است و نیاز به بهبود دارد. وو و همکاران [ 19] یک نقشه تراکم حمل و نقل جهانی بر اساس داده های AIS ساخت که توزیع کشتی ها و ترافیک جهانی را نشان می دهد. با این حال، تنظیم پارامتر روش به تجربه شخصی بستگی دارد و فاقد قابلیت تفسیر است. جین و همکاران [ 20 ] یک چارچوب تجزیه و تحلیل بصری برای بررسی تعاملی ویژگی های رفتار کشتی با استفاده از تلفیق تجسم با داده کاوی و یک مدل کنترل کننده تعامل انسان-رایانه-پیشنهاد کرد. با این حال، از آنجایی که چارچوب نمی تواند تجزیه و تحلیل رفتار کشتی را با مجموعه داده های بزرگ در زمان واقعی پشتیبانی کند، کارایی آن باید بهبود یابد. زو و همکاران [ 21] یک الگوریتم چگالی زمانی 4 بعدی را پیشنهاد کرد، از تکنیک های تجسم حجم برای تجسم حجم چگالی حاصل استفاده کرد و الگوهای حرکت اجسام متحرک در فضا و زمان را از طریق یک مورد کاربردی واقعی کاوش کرد. با این حال، این الگوریتم دارای محدودیت های پیچیدگی محاسباتی بالا و راندمان رندر پایین است. او و همکاران [ 22 ] کیفیت داده های AIS را به صورت بصری با استفاده از یک پلت فرم تجزیه و تحلیل بصری برای کیفیت داده های AIS ارزیابی و کاوش کرد. ژانگ و همکاران [ 23 ] یک روش بصری تعاملی برای شناسایی نقاط ماندگاری در مسیر پیشنهاد کرد، اما این روش تنها در مدت زمان کوتاهی مؤثر است و زمانی که مسیر طولانی باشد، تأثیر ضعیفی دارد. استورم فورو و همکاران [ 24] یک ابزار تحلیل بصری جغرافیایی مبتنی بر وب تعاملی طراحی کرد تا از مسیر یک قایق ماهیگیری برای شناسایی عملیات صید گزارش نشده استفاده کند. اوزتورک و همکاران [ 25 ] یک ابزار تجزیه و تحلیل بصری ملموس را توسعه داد که از داده های AIS برای تجزیه و تحلیل ترافیک دریایی بر اساس مکانی و زمانی استفاده می کند. این رویکرد میتواند ساختار ایمنی راهها و کشتیهای منفرد را در سطح خرد تحلیل کند و تلاش خوبی برای تجسم فناوری در زمینه ترافیک دریایی است.
2.2. داده کاوی با مسیر
داده های مسیر نمایشی از رفتار ناوبری کشتی است که می تواند اطلاعاتی مانند حالت ناوبری و قوانین رفتار کشتی را ترسیم کند. در حال حاضر، بسیاری از محققان بحث های عمیق و موثری را در مورد تحقیق روش های داده کاوی مسیر کشتی انجام داده اند.
وی و همکاران [ 26 ] یک الگوریتم فشردهسازی مسیر AIS با در نظر گرفتن ویژگیهای فضا و حرکت مسیرها بر اساس الگوریتم داگلاس-پوکر و پنجره کشویی طراحی کرد، که میتواند مسیرهای AIS را با توجه به ویژگیهای رفتاری کشتیها فشرده کند. اشکالات اصلی الگوریتم این است که ضریب آستانه را نمی توان به صورت تطبیقی تعیین کرد و زمان اجرا طولانی است. چن و همکاران [ 27 ] یک مدل بهبود یافته SRC (طبقهبندی نمایش پراکنده) مبتنی بر Lp-norm برای طبقهبندی الگوهای حرکت کشتیها پیشنهاد کرد، که میتواند به طور موثر الگوهای حرکت کشتی را در آبراههای داخلی طبقهبندی کند. مدل پیشنهادی نسبت به سایر روشهای طبقهبندی نماینده برتر است. ژائو و همکاران [ 28] یک روش ترکیبی متشکل از الگوریتم DBSCAN (خوشهبندی فضایی برنامههای کاربردی با نویز مبتنی بر چگالی) و شبکه عصبی تکراری را پیشنهاد کرد که میتواند به سرعت رفتار غیرعادی کشتیها را در سرعت، مسیر و مسیر تشخیص دهد. با این حال، این روش نیاز بالایی به کیفیت داده های مسیر کشتی نمونه دارد، که کاربرد عملی را پیچیده تر می کند. لیو و همکاران [ 29 ] یک چارچوب شناسایی بلادرنگ خطر برخورد منطقهای را بر اساس دادههای AIS پیشنهاد کرد که امکان نظارت بر خطر برخورد و تجزیه و تحلیل خطر برخورد را فراهم میکند. لیو و همکاران [ 30] کشتی های ورودی و خروجی را به عنوان اهداف تحقیق در نظر گرفت و بر اساس ویژگی های ساختار جریان ترافیک که توسط داده های مسیر AIS هدایت می شود، روشی برای تخمین ظرفیت ناوبری آبراه های شلوغ پیشنهاد کرد. رویکرد پیشنهادی از طراحی کانالها و تعیین طرحهای برنامهریزی برای کشتیها در آبراههای شلوغ پشتیبانی میکند. چن و همکاران [ 31 ] یک الگوریتم کانولوشنال شبکه عصبی – طبقهبندی الگوی حرکت کشتی (CNN-SMMC) را بر اساس دادههای AIS پیشنهاد کرد، که میتواند به طور موثر اطلاعات حرکت کشتی را استخراج کند و طبقهبندی حرکت کشتی را کاملاً درک کند. مشابه روش طبقهبندی CNN، این روش همچنین دارای محدودیتهای تنظیم پارامتر دشوار و الزامات بالا برای کیفیت نمونه است. وانگ و همکاران [ 32] AIS کشتی و دادههای کدگذاری جغرافیایی کانال را برای مدلسازی ویژگیهای جریان ترافیک ترکیب کرد، همبستگی بین سرعت کشتی و تراکم را تخمین زد و عملکرد ترافیک حملونقل در بخشهای مختلف را تحلیل کرد. کار آنها بینش های مفیدی را برای آزمایش منطقی بودن محدودیت های سرعت در سایر آبراه ها یا کانال های حمل و نقل ارائه می دهد. یان و همکاران [ 33 ] مسیر معنایی و نظریه گراف را برای تحقق بخشیدن به استخراج و بیان مسیرهای ترافیک دریایی در مناطق بزرگ دریایی به روشی نسبتاً ساده و آسان ترکیب کرد. با این حال، روش آنها تأثیر انواع کشتی را در نظر نمی گیرد، بنابراین استحکام روش باید تقویت شود.
اگرچه نتایج ارزشمند زیادی در کار قبلی به دست آمده است، روش تجسم بر نحوه نمایش داده های مسیر AIS به طور کارآمد و با کیفیت متمرکز است، در حالی که تجزیه و تحلیل رفتار کشتی بر کارایی الگوریتم ها تمرکز می کند و تجسم را نادیده می گیرد. در حال حاضر، هنوز یک سیستم تجسم تعاملی برای تجزیه و تحلیل جامع و کارآمد رفتار کشتی وجود ندارد. بنابراین، این مقاله وظایف تجزیه و تحلیل بصری سیستماتیک و جامعتری را با ترکیب تجسم دادههای مسیر کشتی و تجسم ویژگی مبتنی بر رفتار کشتی پیشنهاد میکند و یک سیستم تجسم با کارایی بالا، مختصر و همکاری چند نما را طراحی و پیادهسازی میکند که به طور مستقیم رفتار کشتی را نشان میدهد و ویژگی های جریان ترافیک
3. نمای کلی سیستم
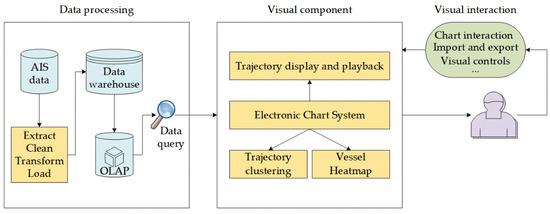
این مقاله یک سیستم تجزیه و تحلیل بصری را برای کشف رفتار کشتی و تحلیل آماری جریان ترافیک کشتی طراحی میکند. شکل 1 گردش کار سیستم را نشان می دهد و عمدتا شامل سه بخش است: یک ماژول پردازش داده، یک ماژول جزء بصری و یک ماژول تعامل بصری.
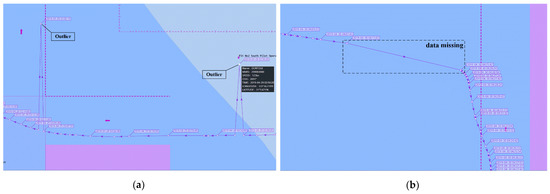
(1) ماژول پردازش داده عمدتاً پیش پردازش و ذخیره سازی داده ها را انجام می دهد. با توجه به نرخ نمونه برداری بالا و منابع متعدد داده های AIS، حجم داده ها زیاد است و تکراری نیز وجود دارد. به منظور تسهیل در ذخیره سازی و محاسبه، داده های اصلی نیاز به کپی برداری و فشرده سازی دارند. به دلیل مشکلات تجهیزات، داده های AIS مستعد نویز و از دست دادن داده ها هستند (همانطور که در شکل 2 نشان داده شده است )، بنابراین لازم است داده های مسیر را حذف و تعمیر کنید. تجسم داده های مسیر در مقیاس بزرگ را نمی توان با تجزیه و تحلیل بصری تعاملی انجام داد زیرا ظرفیت ذخیره سازی بزرگ و اکتساب پرس و جو کند است. این مقاله از انبار داده [ 34] برای مدیریت داده ها، که می تواند به طور موثر هزینه محاسبه سیستم را کاهش دهد و کارایی کار سیستم را بهبود بخشد.
(2) ماژول جزء بصری عمدتاً تشخیص نقاط ماندن کشتی، نمایش و پخش مسیرهای کشتی بر اساس ECS، تجزیه و تحلیل جریان ترافیک کشتی بر اساس خوشه بندی چگالی و نقشه حرارتی کشتی را درک می کند. از طریق کار مشترک بین اجزا، به طور موثر به کاربران کمک می کند تا توزیع داده ها را درک کنند، روابط داده های مسیر را مرور کنند، الگوهای رفتار کشتی را کشف کنند و داده های مسیر دقیق را مشاهده کنند.
(3) ماژول تعامل بصری تعاملات رابط غنی را طراحی می کند. با تنظیم یک منوی بصری، کاربران می توانند عملیات اساسی ECS را کامل کنند: وارد کردن و صادرات داده های مسیر، فشرده سازی داده های مسیر، نمایش داده های مسیر و پخش در دوره ها و مناطق مختلف، تجزیه و تحلیل خوشه بندی مسیر، نقشه حرارتی کشتی و غیره.
4. داده ها و روش
4.1. داده ها
4.1.1. توضیحات داده ها
داده های AIS شامل 27 نوع پیام AIS است که در میان آنها گزارش موقعیت، گزارش ایستا و گزارش سفر حاوی مهمترین اطلاعات کشتی است. یک گزارش موقعیت AIS می تواند یک نقطه مسیر AIS ایجاد کند، در حالی که مسیر AIS یک کشتی مجموعه ای از نقاط مسیر پیوسته همان کشتی است. گزارش موقعیت AIS بسته به وضعیت ناوبری کشتی و نوع AIS (کلاس A یا کلاس B) با فاصله 2 تا 180 ثانیه پخش می شود. با توجه به الزامات اتحادیه بین المللی مخابرات (ITU)، فواصل گزارش دهی و جزئیات بیشتر برای AIS در جدول 1 نشان داده شده است [ 35 ].]. بنابراین، داده های مسیر AIS می توانند حرکت کشتی ها را تا حد معینی بازیابی کنند. علاوه بر ارائه اطلاعات موقعیت شناور، دادههای AIS همچنین میتوانند اطلاعاتی مانند مقصد، نوع کشتی، اندازه و سرعت و مسیر فعلی کشتی مربوط به نقطه مسیر را ارائه دهند [ 4 ]]. بنابراین، استفاده صحیح از AIS برای قضاوت حرکت کشتی و هماهنگی اقدامات اجتناب از برخورد مفید است و نقش مهمی در جلوگیری از برخورد، به ویژه برای کشتی هایی که در آب های با دید ضعیف تردد می کنند، ایفا می کند. در عین حال، همچنین باید توجه داشت که هر کشتی مجهز به AIS نیست. اگرچه برخی از کشتی ها مجهز به AIS هستند، استفاده و تنظیمات آن استاندارد نیست. ممکن است داده های AIS نیز با تأخیر مواجه شوند، بنابراین داده های دریافتی ممکن است صحیح نباشند. عملکرد اصلی داده های AIS شناسایی کشتی و تحقیقات دانشگاهی است، نه جلوگیری از برخورد کشتی در زمان واقعی.
دادههای AIS بهعنوان یک هدف تحقیقاتی دادههای بزرگ مفید، ارزش تحقیقاتی بالایی دارد. از طریق تجزیه و تحلیل بصری داده های AIS، می توان اطلاعات الگوی بالقوه کشتی ها را به دست آورد و رفتارهای مانور و ویژگی های ناوبری کشتی ها را شناسایی کرد.
4.1.2. پیش پردازش داده ها
داده های با کیفیت پایین منجر به نتایج استخراج با کیفیت پایین می شود. برای بهبود کیفیت داده ها، باید داده ها را از قبل پردازش کنیم. در مرحله اول داده های AIS دارای نرخ نمونه برداری و ناهمگونی بالایی هستند که به ناچار منجر به نویز، افزونگی و تکرار می شود، بنابراین پاکسازی داده ها ضروری است. پاکسازی دادههای AIS عمدتاً شامل حذف مجدد، پر کردن مقادیر از دست رفته و صاف کردن نویز است [ 36 ]. مرحله دوم فشرده سازی مسیر است. با توجه به نرخ نمونه برداری بالای تجهیزات AIS، میزان داده های مسیر زیاد است که به طور جدی بر کارایی ذخیره سازی و تحلیل تأثیر می گذارد. بنابراین، فشرده سازی داده های مسیر ضروری است. در این مقاله، یک روش فشردهسازی مسیر کشتی با در نظر گرفتن ویژگیهای زمان و سرعت اتخاذ میشود و روش خاص در ادامه شرح داده میشود.بخش 4.2.1. در مرحله سوم، تنها گزارش موقعیت در تحلیل داده های مسیر ناکافی است و گزارش استاتیک و گزارش سفر ضروری هستند. بنابراین لازم است داده های پیام های مختلف را با هم ادغام کرد، یعنی یکپارچه سازی داده ها را انجام داد. در این مقاله، پیامهای مختلف با توجه به ویژگیهای مشترک هویتهای خدمات موبایل دریایی (MMSI) و مُهرهای زمانی پیامها مطابقت و یکپارچه میشوند. در مرحله چهارم، کاهش داده ها ضروری است زیرا مجموعه داده های AIS یکپارچه بزرگ است و تجزیه و تحلیل مستقیم بدون پیش پردازش، چنین تحلیلی را غیرعملی یا غیرقابل اجرا می کند. این مقاله وظایف خاص را با جزئیات تجزیه و تحلیل می کند. زیرمجموعه های مشخصه های مختلف را برای مجموعه داده های وظایف مختلف انتخاب می کند. و صفات نامربوط، ضعیف مرتبط یا زائد را حذف می کند.
4.1.3. ذخیره سازی داده ها و دسترسی
به منظور تسهیل ذخیره سازی و اکتساب داده ها، این مقاله از یک روش جمع آوری داده موضوع محور، یکپارچه و نسبتاً پایدار، انبار داده، برای مدیریت داده ها استفاده می کند. انبار داده در این مقاله ساختار سیستم سه لایه سنتی را اتخاذ می کند. لایه پایین سرور پایگاه داده انبار است که یک سیستم پایگاه داده رابطه ای است که برای استخراج، تمیز کردن، بارگذاری و تازه کردن داده ها استفاده می شود [ 37 ، 38]؛ لایه میانی یک سرور پردازش تحلیلی آنلاین (OLAP) است که مسئول تجزیه و تحلیل چند بعدی مانند برش، برش و حفاری داده ها است. لایه بالایی لایه مشتری است، شامل ابزارهای پرس و جو و تجزیه و تحلیل. مدل انبار داده اتخاذ شده در این مقاله از دیدگاه ساختاری یک انبار مجازی است که مجموعه ای از دیدگاه ها در پایگاه داده عملیات است. به عنوان مثال، این مقاله داده های AIS را از آب های بندری مختلف و دوره های مختلف در حالت دید ذخیره می کند.
4.2. روش شناسی
4.2.1. فشرده سازی مسیر
در حال حاضر، اکثر الگوریتمهای فشردهسازی مسیر کشتی، مانند داگلاس-پوکر [ 39 ]، ویسوالینگام-وایات [ 40 ]، بر اساس ویژگیهای هندسی مسیر هستند. با این حال، علاوه بر ویژگیهای هندسی، دادههای مسیر شامل ویژگیهای حرکتی مانند سرعت و فاصله زمانی نیز هستند و وضعیت حرکت سوژه مسیر تأثیر زیادی بر شکل هندسی دادههای مسیر دارد. برای حل این مشکل، به منظور حفظ اطلاعات مشخصه بیشتر از داده های مسیر و اطمینان از یکپارچگی اطلاعات مسیر، این مقاله از یک الگوریتم فشرده سازی داده های مسیر استفاده می کند که ویژگی های حرکت کشتی را در نظر می گیرد [ 41 ].]. الگوریتم نقطه لنگر را تنظیم می کند، سپس به تدریج “پنجره” را باز می کند. در هر مرحله، دو حالت توقف وجود دارد – یکی بر اساس اندازهگیری فاصله همزمان و دیگری بر اساس تفاوت سرعت بین بخشهای مسیر قبلی و بعدی. این سرعتها، سرعتهای اندازهگیری شده کشتی نیستند، زیرا الگوریتم فرض میکند که این سرعتها در دسترس نیستند. در عوض، آنها مقادیر سرعت هستند که از مهرهای زمانی و مکان ها به دست می آیند. فرآیند ساده سازی خاص در الگوریتم 1 خلاصه شده است:
| الگوریتم 1: الگوریتم ساده سازی با در نظر گرفتن ویژگی های رفتاری کشتی (SBC) |
ورودی: لیست نقاط مسیر، [ خطای پردازش ریاضی ](جایی که نقطه مسیر است [ خطای پردازش ریاضی ]شامل: مهر زمانی، مکان)؛
آستانه اختلاف فاصله، [ خطای پردازش ریاضی ];
آستانه اختلاف سرعت، [ خطای پردازش ریاضی ].
خروجی: فهرست نقاط مسیر ساده شده
// تعداد نقاط مسیر در [ خطای پردازش ریاضی ]
اگر [ خطای پردازش ریاضی ]سپس
برگرد [ خطای پردازش ریاضی ]
else
// در ابتدا شرط توقف را روی false قرار دهید
[ خطای پردازش ریاضی ]
[ خطای پردازش ریاضی ]
در حالی که ( [ خطای پردازش ریاضی ]و نه [ خطای پردازش ریاضی ]) انجام دادن
[ خطای پردازش ریاضی ]
در حالی که ( [ خطای پردازش ریاضی ]و نه [ خطای پردازش ریاضی ]) انجام
// [ خطای پردازش ریاضی ]مهر زمانی نمایندگان، [ خطای پردازش ریاضی ]و [ خطای پردازش ریاضی ]تفاوت مهر زمانی هستند
[ خطای پردازش ریاضی ]
[ خطای پردازش ریاضی ]
// [ خطای پردازش ریاضی ]نشان دهنده محل نقطه مسیر
// [ خطای پردازش ریاضی ]مختصات (طول و عرض جغرافیایی) یک نقطه مسیر را نشان می دهد
[ خطای پردازش ریاضی ]
// [ خطای پردازش ریاضی ]تابعی است که دو نقطه را می گیرد و فاصله بین آنها را برمی گرداند
// [ خطای پردازش ریاضی ]نشان دهنده سرعت متوسط بین بخش مسیر قبلی و بعدی است
[ خطای پردازش ریاضی ]
[ خطای پردازش ریاضی ]
اگر [ خطای پردازش ریاضی ]یا [ خطای پردازش ریاضی ]سپس
[ خطای پردازش ریاضی ]
دیگر [ خطای پردازش ریاضی ]
پایان اگر
پایان در حالی که
اگر [ خطای پردازش ریاضی ]سپس
// دو مسیر
بازگشت را به هم متصل می کند[ خطای پردازش ریاضی ]
پایان اگر
[ خطای پردازش ریاضی ]
پایان در حالی که
اگر نه [ خطای پردازش ریاضی ]سپس
// یک دنباله جدید متشکل از اولین و آخرین نقطه در [ خطای پردازش ریاضی ]
برگشت [ خطای پردازش ریاضی ]
پایان اگر
پایان اگر |
مرحله 1: نقاط توالی مسیر یک کشتی را وارد کنید [ خطای پردازش ریاضی ](نقطه مسیر شامل: مهر زمانی، مکان)، آستانه فاصله [ خطای پردازش ریاضی ]، و آستانه سرعت [ خطای پردازش ریاضی ]. اگر طول از [ خطای پردازش ریاضی ]بزرگتر از 2 است، شرط توقف را مقداردهی اولیه کنید [ خطای پردازش ریاضی ]به false بروید و به مرحله 2 بروید، در غیر این صورت دنباله را برگردانید [ خطای پردازش ریاضی ].
مرحله 2: از نقطه دوم شروع کنید، هر نقطه را وارد کنید [ خطای پردازش ریاضی ]به عنوان نقطه لنگر استفاده می شود و پیمایش رو به جلو خارجی تا انتهای آن انجام می شود [ خطای پردازش ریاضی ]. اگر نقطه لنگر به انتهای آن نرسد [ خطای پردازش ریاضی ]و [ خطای پردازش ریاضی ]نادرست است، سپس به مرحله 3 بروید. در غیر این صورت به مرحله 5 بروید.
مرحله 3: اجازه دهید دنباله قبل از نقطه لنگر مجموعه نقطه متحرک باشد [ خطای پردازش ریاضی ]از نقطه لنگر که در [ خطای پردازش ریاضی ]، با شروع از نقطه دوم، هر نقطه نقطه حرکت نقطه لنگر است و پیمایش داخلی به جلو تا نقطه لنگر انجام می شود. در فرآیند پیمایش داخلی، دو شرط توقف تأیید می شود: یکی این که اندازه گیری فاصله همزمان (فاصله کروی بین موقعیت پیش بینی شده و موقعیت واقعی نقطه متحرک و موقعیت پیش بینی شده نقطه متحرک با معادلات (1) به دست می آید. )–(4)) بزرگتر از [ خطای پردازش ریاضی ]و دیگری این که اختلاف سرعت متوسط بین بخش مسیر قبلی و بعدی که با نقطه متحرک جدا شده است بیشتر از [ خطای پردازش ریاضی ]. اگر شرایط توقف برقرار نیست، برای ادامه پیمایش داخلی، نقطه حرکت را به جلو منتقل کنید (اگر نقطه حرکت به نقطه لنگر رسید، پیمایش داخلی را متوقف کنید، نقطه لنگر را به جلو ببرید و به مرحله 2 بروید) [ خطای پردازش ریاضی ]درست است و به مرحله 4 بروید.
جایی که [ خطای پردازش ریاضی ]تفاوت مهر زمانی بین نقطه لنگر و نقطه اول است، [ خطای پردازش ریاضی ]تفاوت مهر زمانی بین نقطه متحرک و اولین نقطه است، [ خطای پردازش ریاضی ]موقعیت نقطه لنگر است، [ خطای پردازش ریاضی ]موقعیت نقطه اول است و [ خطای پردازش ریاضی ]موقعیت پیش بینی شده نقطه متحرک است.
مرحله 4: نقاط بعد از نقطه متحرک به داخل را قطع کنید [ خطای پردازش ریاضی ]برای به دست آوردن یک دنباله جدید [ خطای پردازش ریاضی ]، و بگیرید [ خطای پردازش ریاضی ]به عنوان ورودی مرحله 1، پردازش بازگشتی را انجام دهید. نقطه اول را به داخل وصل کنید [ خطای پردازش ریاضی ]و مقدار بازگشتی تابع بازگشتی را برای تشکیل یک دنباله جدید و برگرداندن آن.
مرحله 5: اگر [ خطای پردازش ریاضی ]نادرست است، یک دنباله جدید متشکل از اولین و آخرین نقطه در [ خطای پردازش ریاضی ]برگردانده می شود. در غیر این صورت هیچ پردازشی انجام نمی شود.
4.2.2. تشخیص نقطه ماندن
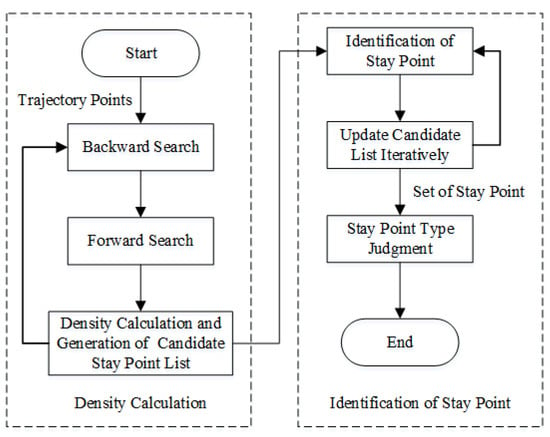
شناسایی و تجزیه و تحلیل نقاط ماندن کشتی (نقاط پهلوگیری، نقاط لنگرگاه) بخش مهمی از تحلیل مسیر است. این نه تنها می تواند اطلاعات اولیه لازم را برای ناوبری ایمن و پهلوگیری کشتی ها فراهم کند، بلکه پشتیبانی تصمیم گیری مهمی را برای برنامه ریزی و ساخت بندر ارائه می دهد. با این حال، روشهای موجود یا تداوم زمانی نقاط مسیر را در نظر نمیگیرند و یا فقط تداوم زمانی را در نظر میگیرند و در نتیجه توانایی تشخیص کافی نقاط ماندن را ندارند. بر اساس ادبیات [ 42]، این مقاله یک روش شناسایی مبتنی بر چگالی نقاط ماندن کشتی را ارائه میکند که تجمع مکانی-زمانی نقاط مسیر را در نظر میگیرد و تداوم زمانی و جهت نقاط مسیر را در نظر میگیرد. الگوریتم عمدتا شامل سه مرحله است: محاسبه چگالی، شناسایی نقطه ماندن و قضاوت نوع. شکل 3 چارچوب الگوریتم تشخیص نقطه ماندن را نشان می دهد.
مرحله 1:محاسبه چگالی در این مرحله هر نقطه از دنباله نقطه مسیر به نوبه خود به عنوان نقطه لنگر در نظر گرفته می شود. با توجه به آستانه فاصله، با جستجوی عقب و جلو در طول خط زمانی، فاصله چگالی هر نقطه لنگر به دست میآید (طولانیترین دنباله پیوسته در یک دنباله نقطه مسیر کشتی معین وجود دارد، و اگر فاصله کروی بین هر نقطه در دنباله بعدی باشد. و نقطه لنگر کمتر از آستانه فاصله داده شده است، دنباله بعدی فاصله چگالی نقطه لنگر است). بر اساس فاصله چگالی، چگالی (تعداد نقاط مسیر در بازه چگالی) و بازه زمانی (اختلاف زمانی بین نقطه شروع و نقطه پایان فاصله چگالی نقاط مسیر) نقطه لنگر محاسبه می شود.
مرحله 2: شناسایی نقاط اقامت. نقاط اقامت نامزد در CSP ها آستانه فاصله و آستانه زمانی را برآورده کرده اند. با این حال، فواصل چگالی این نقاط ماندگاری کاندید ممکن است همپوشانی داشته باشند، بنابراین در فرآیند شناسایی نقاط اقامت، CSP ها به طور مکرر شناسایی و بر اساس تراکم از زیاد به کم به روز می شوند و نقاط ماندگاری ناهمگون تا زمانی که CSP ها خالی شود، به دست می آیند.
مرحله 3: قضاوت نوع دو حالت ماندن کشتی وجود دارد: پهلوگیری و لنگر انداختن. در طول لنگر انداختن، کشتی به دلیل تأثیر نیروی هیدرودینامیکی، نیروی باد و کشش زنجیره لنگر، انحراف دوره ای را نشان می دهد. به خصوص زمانی که کشتی در آب های جزر و مدی لنگر انداخته باشد، موقعیت کشتی با تغییر جریان جزر و مد تغییر می کند. بنابراین انحراف معیار موقعیت ها و سرعت های نقطه سکونت در طول دوره لنگر انداختن بیشتر و در طول دوره پهلوگیری کمتر است. انحراف استاندارد موقعیت ها و سرعت ها را در هر نقطه اقامت محاسبه کنید. اگر انحراف معیار نقطه ماندن بیشتر از آستانه باشد، نقطه لنگر است. در غیر این صورت، نقطه پهلوگیری است.
4.2.3. خوشه بندی مسیر
تجزیه و تحلیل خوشهبندی، اشیاء داده را بر اساس شباهت دادهها به خوشهها تقسیم میکند و حداکثر فاصله بین خوشهها و حداقل فاصله درون خوشه را حفظ میکند. خوشهبندی مسیر کشتی، توسعهای از تجزیه و تحلیل خوشهبندی در مسیر مکانی-زمانی است. هدف آن گروه بندی مسیرهای کشتی با رفتارهای مشابه در یک کلاس بر اساس شباهت مکانی یا زمانی است. از طریق خوشهبندی، میتوانیم الگوهای ناوبری کشتی را پیدا کنیم، قوانین ناوبری را تجزیه و تحلیل کنیم، رفتارهای غیرعادی را تشخیص دهیم، و رفتارهای حرکتی آینده را پیشبینی کنیم. دو بخش ضروری در فرآیند خوشه بندی مسیر کشتی وجود دارد. یکی اندازه گیری شباهت بین مسیرها و دیگری خوشه بندی مسیر است.
(1) اندازه گیری شباهت. شباهت مسیر معمولاً با یک تابع فاصله محاسبه می شود. در این مقاله از اندازه گیری فاصله FastDTW برای بیان شباهت بین دو مسیر استفاده شده است. FastDTW همان مزیت DTW را دارد و آن این است که محدود به یکسان بودن تعداد نقاط بین دو مسیر نیست، اما پیچیدگی محاسبه DTW را تا حد زیادی کاهش می دهد و کارایی خوشه بندی را بهبود می بخشد. FastDTW محدودیت و انتزاع داده را برای سرعت بخشیدن به محاسبه DTW ترکیب می کند.
(2) خوشه بندی مسیر. در این مقاله، الگوریتم خوشهبندی مبتنی بر چگالی OPTICS برای خوشهبندی مسیرهای کشتی استفاده میشود. الگوریتم OPTICS به این دلیل انتخاب شده است که به طور ویژه برای پردازش داده های مکانی توسعه یافته است. می تواند خوشه هایی با چگالی دلخواه را بدون تنظیم تعداد خوشه ها به عنوان یک پارامتر صریح به دست آورد. شاید مهمتر از همه، این می تواند خوشه هایی با تراکم های مختلف را که معمولاً در ترافیک دریایی یافت می شود، مدیریت کند.
در این مقاله، الگوریتم اندازهگیری شباهت FastDTW و روش خوشهبندی OPTICS برای تحقق خوشهبندی مسیر کشتی سریع بدون پارامتر ترکیب شدهاند.
4.2.4. نقشه حرارت
تراکم کشتی به تعداد شناورها در یک واحد آنی مساحت آب اشاره دارد. این نشان دهنده تراکم کشتی ها در آب است و همچنین میزان شلوغی و درجه خطرناک تردد کشتی ها در آب ها را تا حدی نشان می دهد. نقش مهمی در انحراف ترافیک کشتی، برنامه ریزی محدوده لنگرگاه، طراحی سیستم مسیریابی کشتی و غیره ایفا می کند. روش سنتی نمایش تراکم کشتی، نقشه توزیع تراکم کشتی است. اگرچه می تواند از نظر کمی و کیفی توزیع فضایی را منعکس کند، اما راحت و شهودی نیست و برجسته کردن مناطق کلیدی دشوار است که باعث می شود تجربه کاربر ضعیف باشد. نقشههای حرارتی میتوانند به سادگی دادهها را با استفاده از رنگها و روشنایی مختلف جمعآوری کنند تا درجات چگالی متفاوت را منعکس کنند و به طور مستقیم درجه چگالی دادههای مکانی را نشان دهند.43 ]. بنابراین، این مقاله استفاده از یک نقشه حرارتی را برای نشان دادن توزیع چگالی کشتی پیشنهاد میکند.
نقشه حرارتی بر اساس تجزیه و تحلیل چگالی هسته [ 9 ، 44 ] است. در تجزیه و تحلیل تراکم هسته، تعداد کشتی ها در واحد سطح با روند تغییر عملکرد هسته به محله تعیین شده توزیع می شود و مناطق همپوشانی اضافه می شوند. در نهایت، چگالی کشتی پیوسته و صاف در مکانهای مختلف در ناحیه آب به دست میآید که به طور شهودی توزیع مقادیر اندازهگیری شده گسسته را در ناحیه پیوسته منعکس میکند. در زیر یک فرآیند تولید مختصر نقشه حرارتی آمده است:
مرحله 1: محاسبه تراکم واحد کشتی. مساحت آب شطرنجی می شود و تعداد شناورها در هر واحد مساحت آنی منطقه آب شمارش می شود و نقشه توزیع تراکم شناور به دست می آید.
مرحله 2: تجزیه و تحلیل چگالی هسته. تابع گاوسی (معادله (5)) به عنوان تابع هسته برای محاسبه هسته گاوسی انتخاب می شود. هسته های گاوسی وزن دار به صورت محلی با چگالی واحد کشتی به عنوان وزن وزن می شوند، هسته های گاوس وزن دار اضافه می شوند و نتایج اضافه شده نرمال می شوند. در نهایت مقدار آنالیز چگالی هسته بدست می آید.
مرحله 3: یک بیت مپ ایجاد کنید، از مقدار تجزیه و تحلیل چگالی هسته به عنوان یک شاخص استفاده کنید، رنگ ها را از باند رنگی گرادیان از پیش تعیین شده ترسیم کنید، و نقشه بیت را مجدداً رنگ آمیزی کنید تا نقشه حرارتی مشخص شود.
5. طراحی بصری
تجسم مسیر در این مقاله توسط DirectX (مجموعه ای از رابط های برنامه نویسی کاربردی که توسط مایکروسافت برای رسیدگی به نیازهای برنامه نویسی گرافیکی موجود در برنامه های امروزی توسعه یافته است) توسعه یافته است، که توانایی ارائه هزاران نقطه داده یا خط در پایانه های رایانه و پشتیبانی را تضمین می کند. ترسیم سریع زمان واقعی تعداد زیادی از مسیرها [ 45 ]. همه نماهای بصری بر اساس ECS هستند، مقیاس بندی شده و به طور همزمان با ENC ها (نمودارهای ناوبری الکترونیکی) تبدیل می شوند. به منظور بهبود کارایی تجسم، این مقاله از یک الگوریتم فشرده سازی مسیر استفاده می کند که ویژگی های حرکت کشتی را در نظر می گیرد ( بخش 4.2.1).از این مقاله) برای فشرده سازی داده های مسیر در مقیاس های چندگانه. در نمایشگرهای مقیاس بزرگ، نقاط مسیر بیشتری باید رزرو شود و با کنترل مقدار آستانه، مسیر باید کمی فشرده شود و بالعکس. بر اساس تقاضای تجزیه و تحلیل داده های AIS کشتی در صنعت (به عنوان مثال، نظارت دریایی، نظارت دینامیکی ناوگان، تجزیه و تحلیل قانون حرکت کشتی، و غیره) [ 46 ] و روش پردازش و تحلیل داده های بالا، این مقاله یک روش چندگانه طراحی می کند. -نمایش سیستم تحلیل بصری، که عمدتا شامل تعامل بصری و سه نمای بصری است: نمایش مسیر و پخش، خوشهبندی مسیر و نقشه حرارتی کشتی.
5.1. نمایش مسیر و پخش
نمایش و پخش مسیر شناور دارای طیف گسترده ای از سناریوهای کاربردی است که می توان آن را در تجزیه و تحلیل ویژگی های ناوبری شناور، مطالعه مکانیسم ترافیک آب، شناسایی تخلفات، بررسی حادثه و جمع آوری شواهد و غیره مشاهده کرد. با توجه به نیاز واقعی. از تجسم مسیر، این مقاله دو حالت نمایش و پخش مسیر را طراحی میکند: حالت چند کشتی و حالت تک کشتی.
(1) حالت چند کشتی. داده های AIS مسیر تقریباً همه کشتی ها را در مسیر ثبت می کند که برای کارهای تحقیقاتی یا پزشکی قانونی مانند توزیع مسیر کشتی، تجزیه و تحلیل جریان ترافیک، بررسی تصادف و غیره بسیار مناسب است. اما آبهای قابل کشتیرانی شناورها وسیع است و تعداد شناورها نیز زیاد است. فقط برخی از مناطق و برخی از کشتی ها مرتبط هستند. اگر مستقیماً بدون غربالگری نمایش داده شوند و مجدداً پخش شوند، بر کارایی پرس و جو داده ها و ارائه مسیر تأثیر می گذارد و تداخل غیر ضروری را افزایش می دهد. بنابراین، این مقاله عملکردهای نمایش و پخش مسیر چند کشتی را توسعه می دهد. با بارگذاری فایل های خارجی یا تنظیم محدوده مورد نظر (طول و عرض جغرافیایی رئوس بالا-چپ و پایین-راست در یک ناحیه مستطیل شکل) و بازه زمانی (زمان شروع و پایان)، تمام کشتیهایی که در بازه زمانی تعیینشده در منطقه مورد نظر حرکت میکنند، پرس و جو میشوند و نتایج بارگیری یا پرس و جو در قالب فهرست ارائه میشوند. فهرست نتایج، نام کشتیها، تعداد نقاط مسیر، زمان شروع، زمان پایان و سایر اطلاعات را فهرست میکند. با کلیک بر روی لیست نتایج، مسیرهای کشتی را می توان به صورت انتخابی نمایش داده و دوباره پخش کرد.
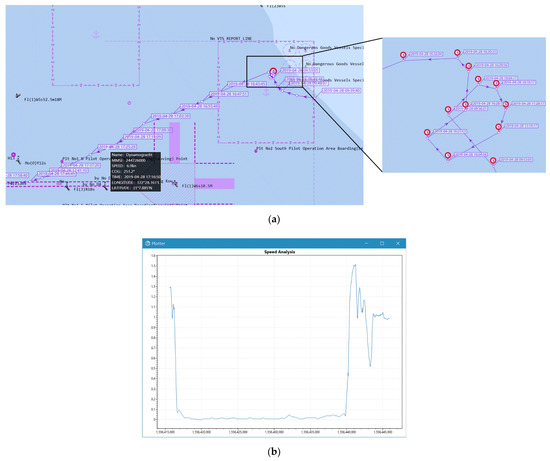
(2) حالت تک کشتی. زمانی که ما فقط نیاز به تجسم داده های مسیر یک کشتی خاص و انجام مطالعات میکروسکوپی مانند تجزیه و تحلیل ویژگی های حرکت کشتی و رفتارهای ناوبری داریم، حالت چند کشتی کمتر مناسب می شود. هنگامی که موقعیت تاریخی کشتی ناشناخته باشد، نمی توان مسیر را از طریق منطقه مورد نظر جستجو کرد. بنابراین، این مقاله عملکرد نمایش مسیر تک کشتی و پخش را توسعه می دهد. با تنظیم هر یک از نام کشتی، تعداد یا علامت تماس و بازه زمانی کشتی خاص، مسیر تک کشتی را می توان به سرعت جستجو کرد و نتایج پرس و جو را می توان نمایش یا پخش مجدد کرد. حالت سیر تک کشتی می تواند موقعیت، سرعت، مسیر و سایر اطلاعات میکروسکوپی کشتی را در نمودار نشان دهد.بخش 4.2.2 این مقاله) می تواند به طور موثر حالت پهلوگیری و لنگر انداختن کشتی را شناسایی کند و مسیر کشتی را از نظر معنایی برچسب گذاری کند.
هر دو حالت از تابع صادرات نتایج پرس و جو پشتیبانی می کنند و آنها را در قالب CSV ذخیره می کنند. کاربران می توانند انتخاب کنند که آیا فقط نمایش داده شوند یا دوباره پخش شوند یا هر دو به طور همزمان.
5.2. خوشه بندی مسیر
هدف از طراحی یک نمای خوشهبندی مسیر، گروهبندی مسیرهایی با رفتارهای مشابه در یک کلاس بر اساس شباهت مکانی یا زمانی و جداسازی مسیرهای دورتر به منظور یافتن الگوهای حرکتی رگها و تحلیل قانون حرکت است. در این مقاله از الگوریتم FastDTW و الگوریتم خوشهبندی OPTICS برای دستیابی به خوشهبندی مسیر کشتی سریع استفاده شده است. دادههای مسیر را میتوان با تنظیم پیشفرض، تنظیم دستی پارامتر یا وارد کردن دادههای خارجی بهدست آورد، و دادههای بهدستآمده را میتوان با تنظیم دستی پارامتر بررسی و فشرده کرد. تجسم خوشهبندی مسیر بر اساس نمایش مسیر چند کشتی است که از تجسم سریع نتایج خوشهبندی پشتیبانی میکند. خوشه های مسیرهای مختلف با رنگ متمایز می شوند و با تغییر حالت رنگ نمودار هماهنگ می شوند.
5.3. نقشه حرارتی کشتی
اگرچه نقشه مسیر میتواند توزیع مسیرها را به طور مستقیم نشان دهد، اما هنگام نمایش دادههای مسیر بیشتر، باعث به هم ریختگی بصری میشود که برجسته کردن مناطق کلیدی را دشوار میکند و تجربه کاربر را ضعیف میکند. بنابراین، این مقاله یک نقشه حرارتی کشتی طراحی میکند تا روند توزیع و تغییر چگالی کشتی را از منظر زمان و مکان نشان دهد. رنگ برای انعکاس داده ها و رنگ پیشرونده برای ترسیم مقدار داده ها در دوره های زمانی متوالی استفاده می شود. ناحیه قرمز تعداد زیادی رگ و تراکم زیاد را نشان می دهد، در حالی که ناحیه سبز تعداد نسبتاً کمی از رگ ها و تراکم نسبتاً کم را نشان می دهد. کشتی ها متحرک هستند. با تغییر زمان، موقعیت مکانی و کمیت شناورها در آب ها تغییر می کند. و توزیع و تراکم شناورها در آبها نیز بر همین اساس تغییر خواهد کرد. با به روز رسانی مداوم نقشه حرارتی، روند تغییر توزیع و چگالی کشتی ها به طور مستقیم نمایش داده می شود. نقشه حرارتی منطقه انتخاب شده را می توان با کشیدن نوار پیشرفت زمان مشاهده و به روز کرد.
5.4. طراحی تعامل
داده های مسیر کشتی حاوی مقدار زیادی اطلاعات است و نشان دادن اطلاعات مکانی و زمانی، اطلاعات روابط و اطلاعات آماری داده های مسیر به طور معقول با یک طرح بصری مشکل است. بنابراین، این مقاله روش پیوند و همکاری چند نما را اتخاذ کرده و از ابزارهای تعاملی برای پشتیبانی از تحلیل بصری استفاده می کند. در زیر برخی از تعاملات پشتیبانی شده توسط این سیستم آورده شده است:
(1) تعامل نمودار. تمام تجسم در این مقاله بر اساس ECS است. این سیستم از نمایش اولیه، کنترل پس زمینه، زوم، رومینگ، نمایش سلسله مراتبی و غیره پشتیبانی می کند.
(2) برچسب ها. در نمای نمایش مسیر، اطلاعات نقطه مسیر توسط یک پنجره پاپ آپ نمایش داده می شود و کاربر می تواند با حرکت دادن ماوس، نمایش و مخفی شدن پنجره پاپ آپ نقطه مسیر را کنترل کند. نقاط اقامت توسط نمادهای ثابت نمایش داده می شوند. دانه بندی داده های مسیر کشتی با مقیاس ENC ها تغییر می کند. برچسب های مسیر نیز به گونه ای تغییر می کنند که از همپوشانی و مسدود شدن برچسب ها جلوگیری شود.
(3) کنترل های بصری. کاربر آستانه زمانی و آستانه برد را از طریق کنترل ورودی در نوار ابزار برای کنترل واردات و صادرات داده های مسیر انتخاب می کند. سرعت پخش مسیر و پیشرفت توسط یک کنترل نوار کشویی کنترل می شود. شروع و توقف نمایش مسیر، پخش مسیر و نقشه های حرارتی از طریق کنترل دکمه کنترل می شود.
6. تجزیه و تحلیل مورد
در این مقاله، دادههای تاریخی موجود AIS جمعآوریشده از 1 تا 30 آوریل 2019 شامل بیش از 6.5 میلیون قطعه اطلاعات AIS است که توسط حدود 10000 کشتی مختلف در مناطق مصب رودخانه یانگ تسه پخش میشود که مساحتی بیش از 2000 کیلومتر مربع را پوشش میدهد. 122 درجه 10 دقیقه شرقی تا 122 درجه و 40 دقیقه شرقی در طول جغرافیایی و از 30 درجه و 55 دقیقه شمالی تا 31 درجه و 15 دقیقه در عرض جغرافیایی. پس از پیش پردازش داده ها، مانند تمیز کردن و فشرده سازی، 1.5 میلیون قطعه داده گزارش موقعیت استخراج شد.
برای سه ماژول تجزیه و تحلیل بصری پیشنهاد شده در بخش 5 ، سه مورد نشان داده شده است، مربوط به بخش 5.1 ، بخش 5.2 و بخش 5.3 ، برای نشان دادن سودمندی و اثربخشی این سیستم.
6.1. نمایش و پخش مسیر کشتی
ECS به طور گسترده در ناوبری کشتی، مدیریت ترافیک کشتی، اعزام کشتی و غیره استفاده می شود. تمامی نماهای این مقاله بر اساس آن نمایش داده شده است. شکل 4 نمودار مصب رودخانه یانگ تسه است. این سیستم از نمایش اولیه، کنترل پسزمینه، مقیاسبندی، رومینگ و نمایش چند لایه ENC پشتیبانی میکند.
نمایش مسیر چند کشتی به طور گسترده در زمینه های تحلیل ترافیک ماکروسکوپی مانند توزیع مسیر کشتی و تجزیه و تحلیل جریان ترافیک استفاده می شود. شکل 5 یک نمایش مسیر چند کشتی است که در آن هر خط سبز نشان دهنده یک مسیر تاریخی کشتی است. شکل 5 a نمایش مسیر از 1 تا 3 آوریل است و شکل 5 b نمایش مسیر از 1 تا 10 آوریل است. مناطق با خطوط متمرکز در شکل 5 عموماً آبهایی مانند مسیرهای متداول کشتی ها و لنگرگاه ها هستند. در شکل 5، شناورهای زیادی از منطقه A عبور می کنند که مسیر مرسوم برخی از شناورها است. با این حال، طبق سیستم مسیریابی، منطقه A یک مسیر قانونی نیست. این یافته اهمیت خاصی برای نظارت دریایی و تنظیم مسیرهای دریایی آینده دارد. با مقایسه شکل 5 الف با شکل 5 ب، می توان دریافت که وقتی تعداد مسیرها زیاد باشد، به هم ریختگی بصری ایجاد می شود و تعداد مسیرها باید به طور منطقی در استفاده واقعی کنترل شود.
همانطور که در شکل 6 نشان داده شده است ، مسیر تاریخی یک کشتی در مصب رودخانه یانگ تسه در 28 آوریل 2019 نشان داده شده است. در شکل 6 a، نقاط موقعیت در مسیر با نقاط سفید با برچسب های زمانی نشان داده شده اند، و نقاط موقعیت مجاور با فلش های جهت دار به هم متصل شده اند. علائم قرمز نقاط ماندن کشتی را مشخص می کند. جزئیات نقطه موقعیت به شکل کادرهای پاپ آپ نمایش داده می شود که وقتی ماوس روی نقاط موقعیت قرار می گیرد فعال می شوند. دانه بندی داده های مسیر کشتی با مقیاس ENC ها تغییر می کند و به صورت سلسله مراتبی نمایش داده می شود. همانطور که در شکل 6 نشان داده شده استب، سرعت تاریخی یک کشتی در قالب یک نمودار تعاملی ظاهر می شود. توسعه عملکرد نمایش مسیر تک کشتی، تحقیقات میکروسکوپی ویژگی های حرکت کشتی و تجزیه و تحلیل رفتار ناوبری را تسهیل می کند.
پخش مسیر کشتی به طور گسترده در زمینههای شناسایی تخلف کشتی، بررسی حادثه، جمعآوری شواهد و غیره استفاده میشود. شکل 7 نمونهای از پخش مسیر چند کشتی در مصب رودخانه یانگ تسه در زمان معینی در 28 آوریل 2019 است. دوبار کلیک کنید. کشتی زرد هدف AIS هدف را فعال می کند. اطلاعات استاتیک و پویا هدف را می توان در پنجره اطلاعات مشاهده کرد. سرعت و پیشرفت پخش مسیر توسط یک نوار کشویی کنترل می شود و شروع، مکث و توقف پخش توسط دکمه ها کنترل می شود. در طول پخش، مسیرهای تاریخی کشتی ها را می توان به صورت انتخابی نمایش داد.
6.2. خوشه بندی مسیر کشتی
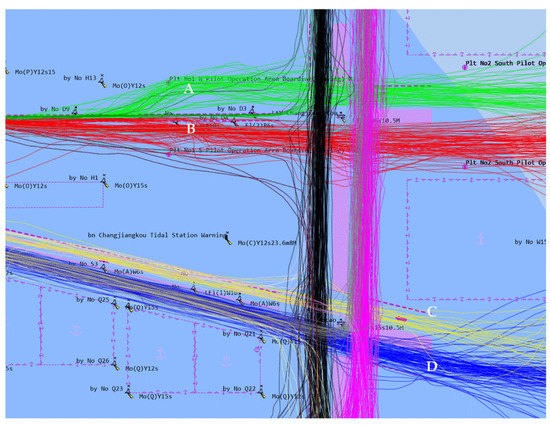
خوشهبندی مسیر رگها را میتوان برای یافتن الگوهای حرکتی عروق، تجزیه و تحلیل قوانین حرکت و تشخیص رفتار غیرعادی رگها استفاده کرد. در این مقاله، الگوریتم FastDTW و الگوریتم OPTICS برای تحقق خوشهبندی مسیر کشتی سریع استفاده میشوند. شکل 8نتایج خوشهبندی مسیرهای کشتی در مصب رودخانه یانگ تسه را از 1 تا 3 آوریل 2019 نشان میدهد. مسیرهای با جهت جریان یکسان و فواصل مجاور در شکل در کنار هم قرار گرفتهاند، و خوشههای مسیر متفاوت بر اساس رنگ متمایز میشوند. تفاوت ها و شباهت های بین جریان های ترافیکی (خوشه ها) را می توان به طور مستقیم از طریق تفاوت رنگ پیدا کرد. با مقایسه گزارش های ایستا و سفر شناورها، می توان دریافت که کشش تمام شناورها در جریان تردد A و B در شکل بالای 7 متر است، در حالی که کشش تمام شناورها در جریان ترافیک C و D زیر 7 متر است. . بنابراین، می توان نتیجه گرفت که «کانال شمالی کانال انحصاری برای شناورهایی با آب خور بزرگتر است و کانال جنوبی کانال انحصاری برای شناورهایی با پیشروی کوچکتر است» که با ناوبری واقعی مطابقت دارد.
6.3. نقشه حرارتی کشتی
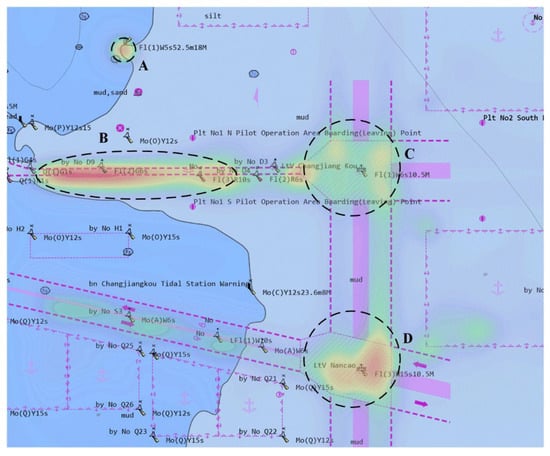
این مقاله یک نقشه حرارتی کشتی طراحی می کند، از رنگ برای انعکاس داده ها استفاده می کند و روند توزیع و تراکم کشتی ها را از منظر مکان و زمان نشان می دهد. شکل 9نقشه حرارتی کشتی را در یک زمان معین در 10 آوریل 2019 نشان می دهد. طبق اصل یک نقشه حرارتی، هرچه رنگ قرمز در نقشه حرارتی تیره تر باشد، چگالی بالاتر است، بنابراین تراکم کشتی ها در مناطق A، B، C و D در شکل بالاتر است. به طور کلی، شناورهای زیادی در آب های تقاطع وجود دارد و تراکم شناورها در آنجا بیشتر است. با توجه به سیستم مسیریابی کشتی از مصب رودخانه یانگ تسه، می توان مشاهده کرد که مناطق B، C و D در شکل، آب های تقاطع هستند که کارایی نقشه حرارتی را تا حدی ثابت می کند. با مشاهده مداوم نقشه حرارتی آبها، می توان دریافت که چگالی شناورها در مناطق B، C و D قبل و بعد از جزر و مد بالا و پایین به شدت تغییر می کند، در حالی که چگالی شناورها در زمان های دیگر نسبتاً کمی تغییر می کند. در تمرین ناوبری،
7. نتیجه گیری
این مقاله یک سیستم تجزیه و تحلیل بصری را طراحی می کند که چندین نما را برای کشف و تجزیه و تحلیل الگوهای رفتار کشتی ترکیب می کند. این مقاله ذخیره و جمع آوری داده های مسیر کشتی توسط انبار داده را تکمیل می کند. از یک الگوریتم فشرده سازی مسیر استفاده می کند که ویژگی های حرکت کشتی را برای پیش پردازش داده های مسیر در نظر می گیرد. الگوریتمی را بر اساس اصل چگالی مکانی-زمانی برای تشخیص نقاط ماندن کشتیها و برچسبگذاری معنایی مسیر کشتی پیشنهاد میکند. از الگوریتم اندازهگیری شباهت FastDTW و الگوریتم خوشهبندی OPTICS برای دستیابی به خوشهبندی سریع مسیرهای کشتی استفاده میکند. و نمای نمایش مسیر و پخش، نمای خوشه بندی مسیر، نمای نقشه حرارتی کشتی و غیره را برای نمایش داده های مسیر کشتی در نمایشگرهای چند نمای و چند حالته ترکیب می کند.
برای تجزیه و تحلیل بصری داده های مسیر کشتی، تحقیق در این مقاله هنوز دارای اشکالاتی است. به عنوان مثال، هنگام برخورد با تعداد زیادی از مسیرها، بازده سیستم بالا نیست. برخی از نماها از نظر زیبایی شناختی خوشایند نیستند و برخی از عملیات ها به اندازه کافی کاربرپسند نیستند. انواع نماها به اندازه کافی غنی نیستند و تجزیه و تحلیل داده ها عمیق نیست. و در مورد شناورهای بدون AIS یا مجهز به AIS که به صورت استاندارد استفاده نمی شود توجهی نمی شود.
تحقیقات آینده با در نظر گرفتن جهتهای زیر انجام خواهد شد: (1) استفاده از GPU برای تسریع در محاسبه اندازهگیری فاصله FastDTW برای بهبود کارایی خوشهبندی مسیر. (2) اتخاذ معماری Model-View-ViewModel (MVVM) برای کاهش اتصال سیستم و ساده کردن فرآیند عملیات سیستم برای بهبود تجربه کاربر. (3) ترکیب سایر ویژگیهای دادههای مسیر و استفاده از تکنیکهای تجسم پیشرفتهتر (مانند مکعب فضا-زمان روی هم یا نقشه پویا) برای ساخت نماهای تحلیلی غنیتر و عمیقتر. (4) تلاش برای تجسم رفتار کشتی بر اساس تصاویر نظارت تصویری کشتی، تصاویر رادار نظارتی مبتنی بر ساحل، ابرهای نقطه LiDAR و تصاویر رادار دیافراگم مصنوعی (SAR) در آینده.







بدون دیدگاه