

برنامه ریزی دقیق مسیر داخلی بر اساس مدل ترکیبی GeoSOT و BIM
چکیده
کلید واژه ها:
برنامه ریزی مسیر داخلی ; GeoSOT-A * GIS-BIM ; مدل توپولوژی نقشه
1. مقدمه
-
روشی برای یافتن کوتاهترین مسیر با استفاده از فرستندههای سیگنال GPS یا بر اساس نقشههای معماری پلان دوبعدی [ 5 ]. با این حال، به دلیل فقدان اطلاعات اولیه دادههای ساختمان، اطمینان از صحت نقشه داخلی دشوار است، زیرا نمیتواند موجودیتهای موانع داخلی را در نظر بگیرد، و بنابراین، خطاهای زیادی در مسیرهای برنامهریزیشده وجود دارد و تعداد زیادی نیز وجود دارد. محدودیت در شهودی بودن و عملی بودن نمایش مسیر و برنامه ریزی مسیرهای عرضی در داخل ساختمان.
-
روش افزودن تابع نقشه داخلی به نقشه ناوبری در فضای باز اتخاذ شده است [ 6 ، 7 ، 8 ، 9 ]. کاربران می توانند فضای داخلی ساختمان را از طریق نقشه داخلی مشاهده کنند و می توانند برای مشاهده به طبقات مختلف سوئیچ کنند. با این وجود، نمایش نقشه داخلی بر اساس بارگذاری پلان طبقه 2 بعدی داخلی است و سرویس اطلاعات مکان برای تجسم سه بعدی فضای داخلی ساختمان هنوز محقق نشده است.
-
در روش سوم، کامپیوتر روش برنامه ریزی مسیر داخلی را بر اساس فناوری BIM (مدل سازی اطلاعات ساختمان) اتخاذ می کند [ 10 ، 11 ، 12 ، 13 ، 14 ، 15 ، 16 .]. با استفاده از مدل BIM به عنوان منبع داده برای برنامه ریزی مسیر و پیمایش تمام گره های مدل از طریق یک الگوریتم، می توان مسیر داخلی را به دست آورد. اما این روش بیشتر برای وضعیت سازه ساختمانی ساده و چند واحد اتاقی مناسب است. پیمایش همه گره ها زمان زیادی می برد و در نتیجه بر بهینه بودن مسیر تاثیر می گذارد. فاقد استفاده کارآمد از اطلاعات هندسه و ویژگی های ساختمان و همچنین در نظر گرفتن توپولوژی فضایی داخلی ساختمان است. برآوردن نیازهای برنامه ریزی مسیر پیوسته چند لایه داخلی فضا دشوار است.
2. مدل ها و روش ها
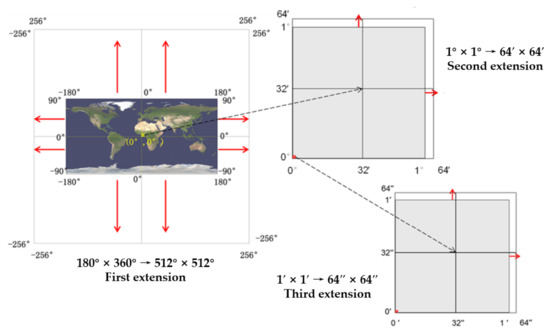
2.1. GeoSOT Global Meshing
-
جنبه اول طول و عرض جغرافیایی و ارتفاع را به کد شبکه جهانی GeoSOT تبدیل می کند. به عنوان مثال، با توجه به طول، عرض جغرافیایی و ارتفاع یک نقطه خاص، این روش کد وکسل مربوط به شبکه جهانی GeoSOT مربوط به نقطه را پیدا می کند.
-
جنبه دوم شبکه جهانی GeoSOT را به عرض جغرافیایی، طول جغرافیایی و ارتفاع تبدیل می کند. این روش، با توجه به کد وکسل شبکه جهانی GeoSOT، طول، عرض جغرافیایی و ارتفاع گوشه موقعیتیابی کد وکسل شبکه را پیدا میکند.
-
طول جغرافیایی، عرض جغرافیایی و ارتفاع تا کد شبکه جهانی GeoSOT.
-
شبکه زیربخش جهانی GeoSOT به عرض و طول و ارتفاع و ارتفاع.
2.2. مدلسازی اطلاعات ساختمان
-
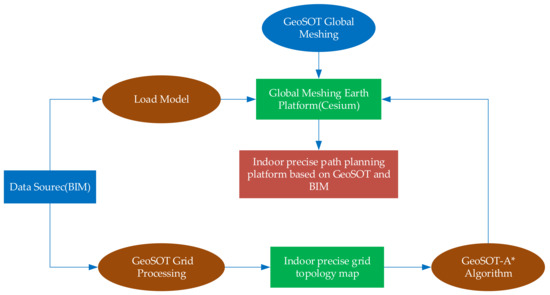
ایجاد یکپارچه سازی اطلاعات داده ها مدل پارامتری ایجاد شده توسط فناوری BIM بیان یکپارچه اطلاعات ساختمان است. این زیرمجموعه اطلاعات کامل داده های ساختمان شامل داده های هندسی، داده های عملکردی و داده های ویژگی را پوشش می دهد. این مجموعه اطلاعات داده ها با یکدیگر مرتبط هستند و می توانند در زمان واقعی به روز شوند و فراخوانی شوند [ 32 ]. بنابراین، مدلهای BIM میتوانند به عنوان «منابع داده ساختمان» برای برنامهریزی مسیر داخلی استفاده شوند. از طریق تجزیه و تحلیل مدل و استخراج اطلاعات، همراه با تقسیمبندی شبکه GeoSOT، میتوان یک نقشه شبکه داخلی دقیق ایجاد کرد، در نتیجه پایهای برای برنامهریزی مسیر داخلی ایجاد کرد.
-
اطلاعات مدل بسیار متنوع است. مدل BIM از روش شی گرا برای توصیف داده های اطلاعاتی کامل ساختمان شامل اطلاعات شکل هندسی سه بعدی و اطلاعات ویژگی استفاده می کند. این داده های اطلاعاتی شی گرا قابل ویرایش و توسعه هستند [ 33 ]. ذخیره سازی اطلاعات مدل از IFC (کلاس های بنیاد صنعت) [ 34 ، 35 ، 36 ]، یک استاندارد مدل داده رایج در زمینه ساختمان های هوشمند بین المللی – به عنوان فرمت تعامل داده های سه بعدی استفاده می کند. IFC توصیفات و تعاریف مختلف اطلاعاتی را در طول استفاده از مدل اطلاعات ساختمان تنظیم می کند [ 37]؛ بنابراین، نه تنها میتواند الزامات برنامهریزی مسیر داخلی را برآورده کند، بلکه از اشتراکگذاری اطلاعات چند پلتفرمی پشتیبانی میکند و دقت و تطبیق مسیرهای داخلی را از برنامهریزی تا بیان از طریق معرفی مدلهای اطلاعاتی بهبود میبخشد.
2.3. برنامه ریزی دقیق مسیر داخلی
2.3.1. طراحی و ساخت نقشه شبکه داخلی
-
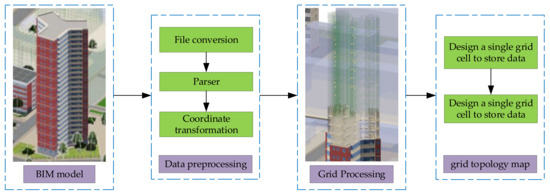
پیش پردازش داده های مدل BIM، شامل تبدیل فرمت مدل BIM، تجزیه مدل BIM و تبدیل مختصات مدل BIM، که با هم ترکیب می شوند.
-
تبدیل فرمت، عمدتاً برای مشکلی که پلت فرم سزیوم از بارگیری پشتیبانی نمی کند، فایل را به یک فایل GLTF با قابلیت تجزیه و تحلیل آسان و قابل بارگذاری تبدیل می کند.
-
تجزیه مدل عمدتا برای تجزیه فایل GLTF تبدیل شده برای به دست آوردن ویژگی ها و مختصات هر ساختمان داخلی استفاده می شود.
-
تبدیل مختصات، مختصات تجزیه شده از مدل BIM، مختصات نسبی هستند. برای روشن شدن، مختصات نسبت به نقطه مرکزی مدل فاصله دارند. بنابراین، لازم است به WGS84 (سیستم ژئودتیک جهانی 1984) متحد شود.
-
-
طراحی و تولید نقشه های شبکه داخلی مدل های BIM شامل طراحی اندازه و سطح شبکه و طراحی ذخیره سازی داده ها در یک واحد شبکه.
-
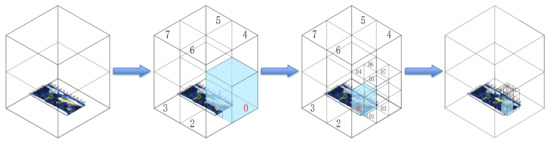
GeoSOT اندازه مش و طراحی سطح را با توجه به اندازه مدل واقعی ساختمان تقسیم می کند، سطح مش را مناسب برای مقیاس انتخاب می کند و اندازه یک مش را تعیین می کند. با توجه به تخمین نیمی از عرض واقعی درب، اندازه یک شبکه منفرد استفاده شده 0.5 متر است (اندازه تقریبی در نزدیکی استوا). با مراجعه به جدول سطح شبکه GeoSOT، می توان سطح 27 سطح را مشاهده کرد.
-
طراحی دادههای ذخیرهسازی یک واحد شبکهای، اطلاعات مختصات و اطلاعات ویژگیهای هر یک از اجزای ساختمان که با تجزیه و تحلیل بهدست میآیند، مانند دیوارها، پلهها، درها و پنجرهها و غیره، به صورت جداگانه تحلیل و شبکهبندی میشوند و در نهایت نقشه شبکه دقیق در داخل مدل اطلاعات ساختمان تولید می شود. با توجه به روش دودویی [0، 1]، از آن به عنوان یک پرچم برای قضاوت در مورد قابل عبور بودن یا نبودن شبکه استفاده می شود. در این میان 0 قابل عبور و 1 غیرقابل عبور است.
-
2.3.2. محاسبات شبکه فضای داخلی
-
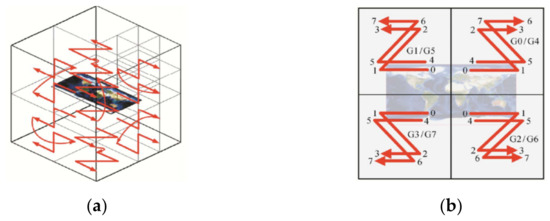
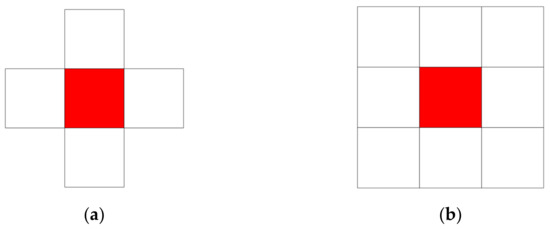
محاسبه مکان محله شبکه شبکه فضایی.
-
رمزگذاری همسایگی طول جغرافیایی رو به جلو:
-
رمزگذاری همسایگی طول جغرافیایی منفی:
-
رمزگذاری همسایگی عرض جغرافیایی رو به جلو:
-
رمزگذاری همسایگی عرض جغرافیایی منفی:
- 2.
-
محاسبه فاصله شبکه فضایی.
-
دو شبکه فضایی فاصله محاسبه ورودی در یک سطح هستند.
-
اگر دو شبکه فضایی ورودی به ترتیب M و N باشند، کدهای دو بعدی GeoSOT عبارتند از ، . با فرض اینکه تابع فاصله کل بین دو شبکه در جهت طول جغرافیایی یا جهت عرض جغرافیایی F MN باشد، فاصله DMN بین دو شبکه فضایی دو بعدی معادله (7) را برآورده می کند.
برای نقشه شبکه طراحی شده در این مقاله، از آنجایی که سطح شبکه GeoSOT در 27 سطح ثابت است و اندازه شبکه 0.5 متر است، فاصله واقعی از دو شبکه فضایی در شبکه فضایی دو بعدی می توان برای برآوردن رابطه (8) به دست آورد:
2.3.3. الگوریتم GeoSOT-A*
الگوریتم A* دو جنبه را برای جستجوی مسیر بهینه در نظر می گیرد: در جنبه اول، الگوریتم A* مقدار فاصله از نقطه شروع تا گره فعلی را محاسبه می کند. در جنبه دوم، الگوریتم A* هزینه را از گره فعلی تا نقطه پایانی تخمین می زند. جنبه دوم به عنوان مبنایی برای قضاوت در مورد اینکه آیا گره فعلی مسیر بهینه است یا خیر، استفاده می شود، و به طور قابل توجهی محدوده جستجو را محدود می کند. بیان تابع الگوریتم A* در رابطه (9) نشان داده شده است:
در این محاسبات، به تابع ارزیابی از نقطه شروع تا پایان اشاره دارد و به هزینه واقعی از نقطه شروع تا گره فعلی اشاره دارد. می توان با جمع کردن هزینه هر گره به دست آورد. به عنوان یک تابع اکتشافی، H(n) به هزینه برآورد شده از گره فعلی تا نقطه پایان اشاره دارد. به طور کلی، مقدار فاصله اقلیدسی یا فاصله منهتن به عنوان هزینه برآورد شده انتخاب می شود، همانطور که در معادلات (10) و (11) نشان داده شده است. ارزش تابع ارزیابی هر گره در منطقه برنامه ریزی داخلی با مجموع قضاوت می شود و .
-
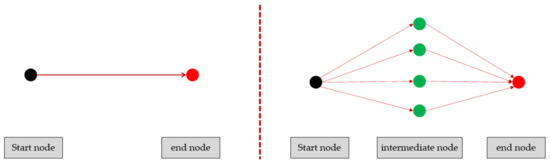
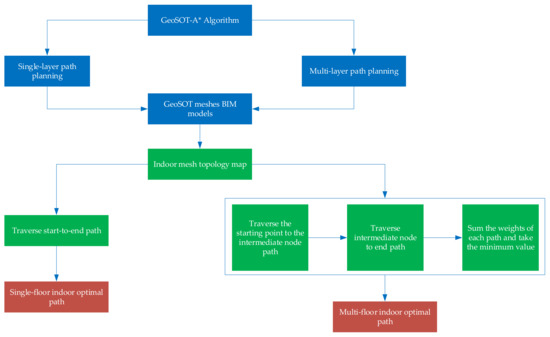
برنامه ریزی مسیر تک طبقه داخلی، بر اساس تقسیم شبکه GeoSOT که سطح طبقه را پردازش می کند، از الگوریتم A* برای جستجوی منطقه هدف استفاده می کند و بهترین مسیر را از طریق ارزیابی بهینه الگوریتم A* تعیین می کند.
-
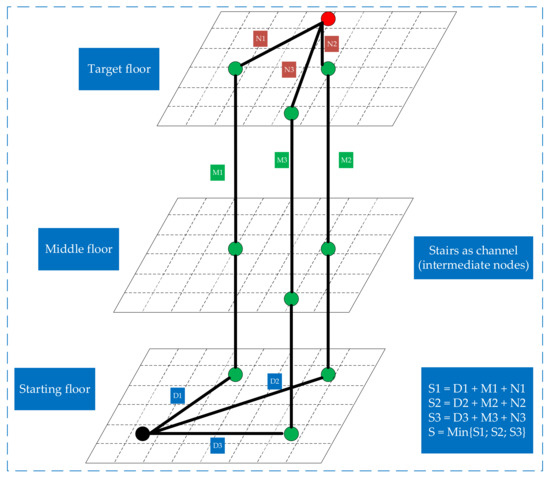
برنامه ریزی مسیر چند طبقه داخلی، بر اساس الگوریتم GeoSOT-A* برای طبقه شروع و طبقه هدف در مدل BIM، به ترتیب – بر اساس مش بندی GeoSOT – از الگوریتم A* برای جستجوی مسیر استفاده می شود. طبقه شروع و طبقه هدف به طور همزمان. با در نظر گرفتن پله های ساختمان به عنوان گره میانی برنامه ریزی مسیرهای چند طبقه، ارزیابی بهینه مسیرهای پیش بینی شده در هر طبقه انجام می شود. در نهایت با مقایسه مقادیر وزنی هر مسیر، مسیر بهینه فضای داخلی چند لایه مشخص می شود.
3. نتایج
-
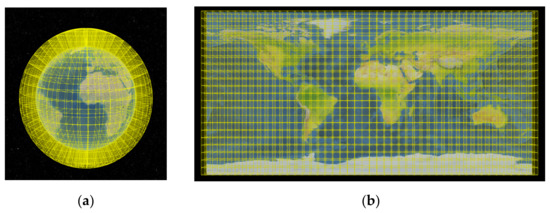
GeoSOT زمین را مشبک می کند. یک کره دیجیتال سه بعدی بر روی پلت فرم سزیوم ساخته شده است، که یک کره مجازی متقابل پلتفرم برای تجسم داده های فضایی پویا است [ 13 ، 15 ]. سپس، فضای زمین به یک سیستم شبکه سه بعدی فضای تودرتوی چند مقیاسی مطابق با فناوری زیربخش GeoSOT تجزیه می شود تا تقسیم بندی شبکه GeoSOT زمین، همانطور که در شکل 12 نشان داده شده است، تحقق یابد .
- 2.
-
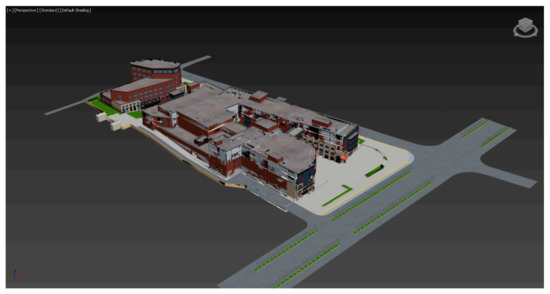
تجزیه و بارگذاری مدل BIM. مدل BIM در محل واقعی ساختمان (خیابان تجاری گوانلان، شهر بایین) مطابق با مقیاس 1:1 شی واقعی، همانطور که در شکل 13 نشان داده شده است، بارگذاری می شود .
- 3.
-
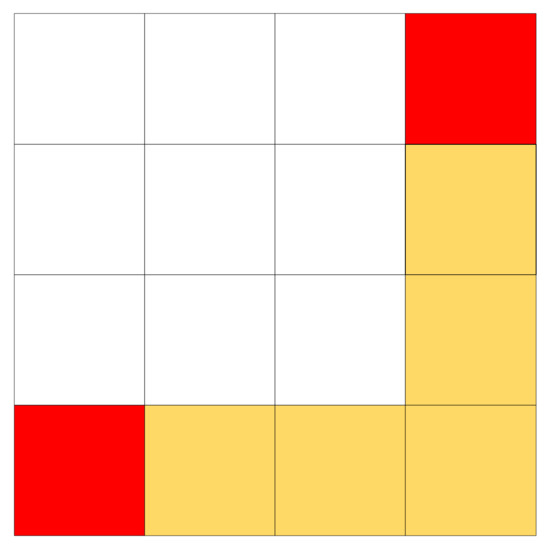
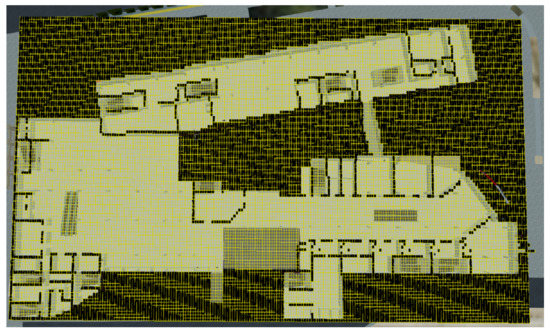
مدل BIM یک نقشه توپولوژی شبکه داخلی را تحلیل و تولید می کند. همانطور که در بالا ذکر شد، با تجزیه و تحلیل مدل BIM، مختصات و اطلاعات ویژگی های هر جزء در مدل ساختمان به دست می آید. سپس پس از پردازش تبدیل مختصات، مختصات جغرافیایی WGS84 هر جزء بر روی کره سه بعدی به دست می آید. با توجه به مراحل تولید نقشه شبکه داخلی که در بالا توضیح داده شد، نقشه شبکه داخل مدل BIM به دست می آید، همانطور که در شکل 14 نشان داده شده است. در این نقشه، رنگ مشکی مناطق صعب العبور را نشان می دهد، رنگ های روشن مناطق قابل عبور را نشان می دهد، و هر مش با ویژگی های اجزای موجودیت خاص در داخل مدل، مانند اطلاعات کلیدی مانند راه پله ها، مرتبط است.
- 4.
-
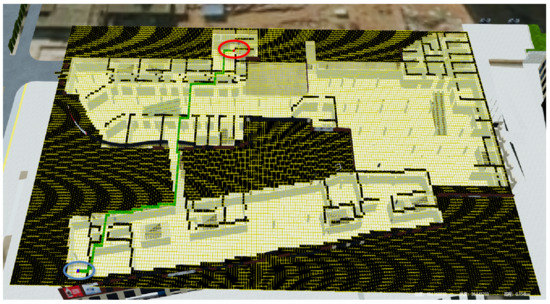
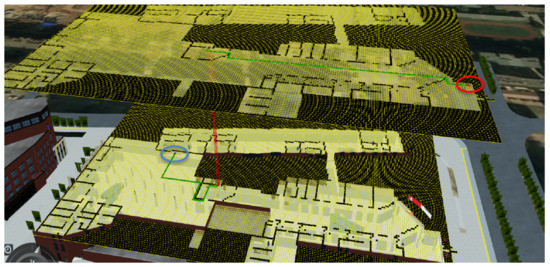
توپولوژی شبکه کف پس از مش بندی مدل BIM در کل رابط نمایش داده می شود و نمودار برنامه ریزی مسیر بهینه از موقعیت شروع تا موقعیت هدف نشان داده می شود. نقطه شروع و نقطه هدف را تنظیم کنید، دایره آبی نشان دهنده موقعیت شروع، دایره قرمز نشان دهنده موقعیت هدف، سبز نشان دهنده مسیر برنامه ریزی شده و ستون قرمز نشان دهنده کانال بین طبقات است. نتایج تجربی برنامه ریزی مسیر تک طبقه در شکل 15 و نتایج تجربی برنامه ریزی مسیر چند طبقه در شکل 16 نشان داده شده است.. این آزمایش صحت و امکان سنجی روش تحلیل برنامه ریزی مسیر بر اساس GeoSOT و BIM را اثبات می کند و همچنین درستی و امکان سنجی الگوریتم GeoSOT-A* طراحی شده در این مقاله را اثبات می کند.
4. بحث
-
از نتایج تجربی نشاندادهشده در شکل 12 و شکل 13 ، میتوان نتیجه گرفت که بهکارگیری ایدههای مرتبط با فناوری GIS در مدل BIM واقعا امکانپذیر است. در واقع، این روش شبکههای GeoSOT را با اطلاعات جغرافیایی واقعی و مدلهای اطلاعات ساختمان ترکیب میکند و برنامهریزی مسیر داخلی را امکانپذیر میسازد. برای این نتایج، شبکه GeoSOT کمبود مدل BIM را که تمام اطلاعات ویژگیهای ساختمان داخلی را دارد و ویژگی موقعیت جغرافیایی واقعی ندارد، جبران میکند.
-
از نتایج تجربی در شکل 14 ، می توان نتیجه گرفت که این روش به طور دقیق نقشه توپولوژی شبکه داخلی را تولید می کند و اگر یکی از شبکه ها انتخاب شود، مختصات و اطلاعات ویژگی مربوط به مدل BIM موجود در شبکه نیز می تواند باشد. مشورت کرد. به این دلیل که مدل BIM اطلاعات کاملی در مورد ساختمان دارد که می تواند موقعیت نسبی اجزای ساختمان را به طور دقیق بیان کند و شبکه GeoSOT چند سطحی و چند مقیاسی با دقت در سطح سانتی متر است که می تواند موقعیت واقعی فضای جغرافیایی را به دقت بیان کند.
-
از نتایج در شکل 15 و شکل 16 ، می توان به دست آورد که الگوریتم برنامه ریزی مسیر داخلی (الگوریتم GeoSOT-A*)، بر اساس روابط فضایی پیشنهاد شده در این مقاله، می تواند به طور منطقی لبه های موانع کف داخلی را شناسایی و از آن اجتناب کند. تحقق برنامه ریزی مسیر بهینه فضای داخلی پیوسته در سراسر طبقات.
-
این روش به طور گسترده مورد استفاده قرار می گیرد و مقیاس پذیری قوی دارد. مدل BIM خیابان تجاری Guanlan در شهر Baiyin به عنوان شیء کاربردی روش انتخاب شد و مدل BIM با مش بندی جهانی GeoSOT برای تولید نقشه توپولوژی مش داخلی پردازش می شود. سپس بر اساس الگوریتم مسیریابی، برنامه ریزی دقیق مسیر داخلی محقق می شود. تجزیه و تحلیل نتایج نشان می دهد که روش پیشنهادی در این مقاله دارای ارزش کاربردی و اهمیت خاصی برای برآوردن الزامات خدمات اطلاعات مکان فضای داخلی در ساخت و ساز شهر هوشمند است.
5. نتیجه گیری ها
منابع
- Xiong، Q. زو، س. زلاتانوا، اس. دو، ز. ژانگ، ی. Zeng, L. روش برنامه ریزی مسیرهای داخلی چند سطحی. بین المللی قوس. فتوگرام حسگر از راه دور اسپات. Inf. علمی 2015 ، 40 ، 19-23. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- Weijs-Perrée، M. دین، جی. ون دن برگ، پی. ون دورست، ام جی یک تحلیل مسیر چند سطحی از روابط بین ویژگیهای تجربه لحظهای، رضایت از فضاهای عمومی شهری، و رفاه ذهنی لحظهای و بلندمدت. بین المللی جی. محیط زیست. Res. بهداشت عمومی 2019 ، 16 ، 3621. [ Google Scholar ] [ CrossRef ] [ PubMed ] [ نسخه سبز ]
- خو، ام. وی، اس. زلاتانوا، اس. برنامه ریزی مسیر داخلی مبتنی بر ژانگ، R. bim با در نظر گرفتن موانع. ISPRS Ann. فتوگرام حسگر از راه دور اسپات. Inf. علمی 2017 ، 4 ، 417-423. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- لی، اچ. ارزیابی نقشه های شناختی چند سطحی برای حمایت از رفتار فضایی بین طبقه در محیط های پیچیده داخلی . انتشار پایان نامه های ProQuest: Ann Arbor، MI، ایالات متحده آمریکا، 2016. [ Google Scholar ]
- چانگدون، ک. دوهی، ی. Haeyoung, J. روش کالیبراسیون دقیق موقعیتهای کاذب در سیستمهای ناوبری داخلی. محاسبه کنید. ریاضی. Appl. 2003 ، 46 ، 1711-1724. [ Google Scholar ]
- یانگ، ال. Worboys, M. Generation of Navigation graphs for space indoor. بین المللی جی. جئوگر. Inf. علمی 2015 ، 29 ، 1737-1756. [ Google Scholar ] [ CrossRef ]
- ساوو، تی. Jugravu، BA برنامه ریزی مسیر داخلی و شبیه سازی اجتناب از موانع. IOP Conf. سلسله. ماتر علمی مهندس 2019 ، 682 ، 12019. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- لی، اف. زلاتانوا، اس. کوپمن، ام. بای، ایکس. Diakité، A. برنامه ریزی مسیر جهانی برای یک پهپاد داخلی. خودکار ساخت و ساز 2018 ، 95 ، 275-283. [ Google Scholar ] [ CrossRef ]
- سان، ن. یانگ، ای. کورنی، جی. چن، ی. برنامه ریزی مسیر معنایی برای ناوبری داخلی و وظایف خانگی. در کنفرانس سالانه سیستم های رباتیک خودمختار ; انتشارات بین المللی Springer: برلین/هایدلبرگ، آلمان، 2019؛ صص 191-201. [ Google Scholar ]
- Wallgrun، JO ساخت خودمختار نمایشهای گراف مسیر مبتنی بر voronoi سلسله مراتبی. در کنفرانس بین المللی شناخت فضایی ; Springer: برلین/هایدلبرگ، آلمان، 2005; ص 413-433. [ Google Scholar ]
- حامیه، ح. دومینیک، دی. کریستین، تی بی موو: برنامه ریزی مسیر داخلی مبتنی بر BIM. در پیشرفت های مکانیک، مهندسی طراحی و ساخت ؛ Springer: برلین/هایدلبرگ، آلمان، 2017; صص 889-899. [ Google Scholar ]
- لی، ایکس. کلارامونت، سی. Ray, C. یک مدل مبتنی بر گراف شبکه ای برای تجزیه و تحلیل فضاهای داخلی دو بعدی. محاسبه کنید. محیط زیست سیستم شهری 2010 ، 34 ، 532-540. [ Google Scholar ] [ CrossRef ]
- لین، YH; لیو، YS; گائو، جی. برنامه ریزی مسیر مبتنی بر IFC برای فضاهای داخلی سه بعدی. Adv. مهندس به اطلاع رساندن. 2013 ، 27 ، 189-205. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- ایسیکداغ، یو. زلاتانوا، اس. Underwood، J. یک مدل BIM-oriented برای پشتیبانی از الزامات ناوبری داخلی. محاسبه کنید. محیط زیست سیستم شهری 2013 ، 41 ، 112-123. [ Google Scholar ] [ CrossRef ]
- بلال، م. اویدله، لو. قدیر، ج. تجزیه و تحلیل ویژگی های حیاتی و ارزیابی نرم افزار BIM: به سوی یک پلاگین برای به حداقل رساندن زباله های ساختمانی با استفاده از داده های بزرگ. بین المللی J. Sustain. ساختن. تکنولوژی توسعه شهری 2015 ، 6 ، 211-228. [ Google Scholar ] [ CrossRef ]
- لیو، ایکس. او، سی. ژائو، اچ. جیا، جی. لیو، سی. مدل سازی اطلاعات ساختمان برنامه ریزی مسیر داخلی: یک رویکرد سبک وزن برای ساختمان پیچیده BIM. محاسبه کنید. انیمات. دنیای مجازی 2021 ، 32 ، e2014. [ Google Scholar ] [ CrossRef ]
- المکاوی، م. Ostman، A. Semantic mapping: یک روش مهندسی هستی شناسی برای ادغام مدل های ساختمان در IFC و CityGML. در مجموعه مقالات سومین اجلاس زمین دیجیتال ISDE، نسبار، بلغارستان، 12 تا 14 ژوئن 2010. [ Google Scholar ]
- کریمی، ح. Akinci, B. CAD and GIS Integration , 1st ed.; کریمی، ح، آکینجی، ب.، ویرایش. CRC Press: Boca Raton، FL، USA، 2010. [ Google Scholar ]
- المیوش، آر. رزوق، م. حجازی، اول. یکپارچه سازی و مدیریت BIM در GIS، بررسی نرم افزار. در مجموعه مقالات ISPRS هشتمین کنفرانس 3DGeoInfo و کارگاه WG II/2، استانبول، ترکیه، 27-29 نوامبر 2013. [ Google Scholar ]
- منگ، ال. چنگ، CQ; چن، دی. مدل کوانتیزاسیون زمین بر اساس شبکه تقسیم بندی جهانی. Acta Geod. Et Cartogr. گناه 2016 ، 45 ، 152-158. [ Google Scholar ]
- Cheng، CQ مقدمه ای بر سازمان زیربخش اطلاعات مکانی ; انتشارات علمی: پکن، چین، 2012. [ Google Scholar ]
- چنگ، CQ; ژنگ، CX روشی برای یکسان سازی شبکه های عرض و طول جغرافیایی موجود. ISPRS Int. J. Geo-Inf. 2012 ، 5 ، 161. [ Google Scholar ] [ CrossRef ]
- لو، ن. چنگ، CQ; یانگ، روش پیش پردازش و آماده سازی داده ها توسط توزیع بر اساس مدل تقسیم جهانی. Geogr. Geo-Inf. علمی 2013 ، 29 ، 56-59. [ Google Scholar ]
- یوان، جی. مدل کد بخش اداری بر اساس شبکه GeoSOT . دانشکده علوم زمین و فضا، دانشگاه پکن: پکن، چین، 2017. [ Google Scholar ]
- چنگ، CQ; تانگ، ایکس سی; چن، بی. Zhai، WX یک روش تقسیم بندی برای یکسان سازی شبکه های عرض و طول موجود. ISPRS Int. J. Geo-Inf. 2016 ، 5 ، 161. [ Google Scholar ] [ CrossRef ]
- هو، XG; چنگ، CQ; تحقیقات تانگ، XC بر روی نمایش داده های سه بعدی بر اساس GeoSOT-3D. J. دانشگاه پکن. 2015 ، 51 ، 1022-1028. [ Google Scholar ]
- پنتیلا، اچ. توصیف تغییرات در فناوری اطلاعات معماری برای درک پیچیدگی طراحی و بیان معماری آزاد. J. Inf. تکنولوژی ساخت و ساز 2006 ، 11 ، 395-408. [ Google Scholar ]
- وانگ، ایکس. Love، PE BIM+ AR: اشتراک گذاری و ارتباط اطلاعات در محل از طریق تجسم پیشرفته. در مجموعه مقالات شانزدهمین کنفرانس بین المللی IEEE در سال 2012 در مورد کار مشترک با پشتیبانی رایانه در طراحی (CSCWD)، ووهان، چین، 23 تا 25 مه 2012. صص 850-855. [ Google Scholar ]
- Dossick، CS; Neff, G. تقسیمات سازمانی در ساخت و ساز تجاری مبتنی بر BIM. J. Constr. مهندس مدیریت 2009 ، 136 ، 459-467. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- وانگ، ایکس. ترویجنز، ام. هو، ال. وانگ، ی. ژو، ی. ادغام واقعیت افزوده با مدل سازی اطلاعات ساختمان: کنترل فرآیند ساخت و ساز در محل برای صنعت گاز طبیعی مایع. خودکار ساخت و ساز 2014 ، 40 ، 96-105. [ Google Scholar ] [ CrossRef ]
- تیلور، جی. برنشتاین، PG پارادایم مسیرهای عمل مدل سازی اطلاعات ساختمان در شبکه های پروژه. جی. مناگ. مهندس 2009 ، 25 ، 69-76. [ Google Scholar ] [ CrossRef ]
- Li, L. تحقیق در مورد مدیریت یکپارچه اطلاعات متنی پروژه ساخت و ساز بر اساس BIM ; دانشگاه صنعتی دالیان: دالیان، چین، 2015. [ Google Scholar ]
- گروه تحقیقاتی BIM دانشگاه Tsinghua. تحقیق در مورد چارچوب استاندارد مدل سازی اطلاعات ساختمان در چین . چاپ معماری و ساخت و ساز چین: پکن، چین، 2011. [ Google Scholar ]
- IFC++. در دسترس آنلاین: https://www.ifcquery.com/ (در 1 ژانویه 2022 قابل دسترسی است).
- لین، وای؛ Lin, PH نسل هوشمند توپولوژی داخلی (i-GIT) برای مسیریابی انسان در فضای داخلی بر اساس مدل های IFC و فناوری 3D GIS. خودکار ساخت و ساز 2018 ، 94 ، 340-359. [ Google Scholar ] [ CrossRef ]
- دانکرز، اس. لدوکس، اچ. ژائو، جی. Stoter, J. تبدیل خودکار مجموعه داده های IFC به ساختمان های CityGML LOD3 از نظر هندسی و معنایی درست: تبدیل خودکار مجموعه داده های IFC به ساختمان های CityGML LOD3. ترانس. GIS 2016 ، 20 ، 547–569. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- ژو، HB; شی، WP; دنگ، XY تحقیق در مورد کتابخانه اجزای BIM بر اساس استاندارد IFC. جی. نمودار. 2017 ، 38 ، 589-595. [ Google Scholar ]
- هارت، PE; نیلسون، نیوجرسی؛ رافائل، بی. مبنای رسمی برای تعیین اکتشافی مسیرهای حداقل هزینه. IEEE Trans. سیستم علمی سایبرن. 1968 ، 4 ، 100-107. [ Google Scholar ] [ CrossRef ]
- تنجا، س. آکینجی، بی. الگوریتمهای Garrett، JH برای تولید خودکار مدلهای ناوبری از مدلهای اطلاعات ساختمان تا پشتیبانی از تطبیق نقشههای داخلی. خودکار ساخت و ساز 2016 ، 61 ، 24-41. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- چن، YB; Mei، YS; یو، جی کیو; سو، XL; Xu, N. برنامه ریزی مسیر وسیله نقلیه هوایی بدون سرنشین سه بعدی با استفاده از الگوریتم جستجوی بسته گرگ اصلاح شده. محاسبات عصبی 2017 ، 266 ، 445-457. [ Google Scholar ]
- وانگ، ز. Cai, J. برنامه ریزی مسیر در محیط رادیواکتیو تاسیسات هسته ای با استفاده از الگوریتم بهینه سازی ازدحام ذرات بهبود یافته. هسته مهندس دس 2018 ، 326 ، 79-86. [ Google Scholar ] [ CrossRef ]
- ساگر، م. میراندا، جی. داوان، وی. دارماراج، اس. روند رو به رشد دوقلوهای دیجیتال مقیاس شهر در سراسر جهان. 2020. در دسترس آنلاین: https://opengovasia.com/the-growing-trend-of-city-scale-digital-twins-around-the-world/ (در 1 ژانویه 2022 قابل دسترسی است).
- کتزلر، بی. ناصرنتین، وی. لاتین، F. دوقلوهای دیجیتال برای شهرها: بررسی وضعیت هنر. محیط ساخته شده 2020 ، 46 ، 547-573. [ Google Scholar ] [ CrossRef ]



بدون دیدگاه