

تجسم سه بعدی (3D) نمودار ناوبری الکترونیکی (ENC) می تواند محیط دریایی و ویژگی های مختلف دریایی را به طور واقعی، دقیق و مستقیم منعکس کند تا عملکرد نادرست در طول استفاده از نمودار را کاهش دهد و راحتی استفاده از نمودار را بهبود بخشد. با توجه به حجم زیاد داده های ENC، ساختار پیچیده داده ها و توزیع ناهموار در فضای سه بعدی، ساخت و رندر بلادرنگ ENC های سه بعدی به سرعت بازیابی داده های فضایی سه بعدی بستگی دارد. بهبود کارایی بازیابی فضایی داده های 3 بعدی ENC برای رندر سریع یک صحنه سه بعدی مفید است. در این مقاله، بر اساس مدل داده های هیدرولوژیکی جهانی S-100 (S-100) و ویژگی های سه بعدی برای طبقه بندی ویژگی های ENC و ایجاد مجموعه داده های ENC سه بعدی، یک ساختار شاخص فضایی ترکیبی بر اساس چهار درخت و R-tree و ساختار داده ویژگیهای ENC، با استفاده از کوچکترین جعبه محدود (SMBB) و روشهای بازیابی طبقهبندی برای بهینهسازی ساختار شاخص فضایی پیشنهاد شدهاست. تمام ویژگی های ENC در یک صحنه دریایی سه بعدی ارائه شده است. با تجزیه و تحلیل همپوشانی ویژگی های ENC و آزمایش کارایی ساختار شاخص فضایی، نتایج نشان می دهد که این روش می تواند به طور موثر نرخ همپوشانی گره های شاخص را کاهش دهد و کارایی بازیابی داده ها را بهبود بخشد، مدیریت موثر داده های ENC سه بعدی را درک کند و بهبود بخشد. سرعت ترسیم ENC های سه بعدی
کلید واژه ها:
نمودار ناوبری الکترونیکی ; ویژگی های ENC ساختار شاخص فضایی ترکیبی ; تجسم
1. مقدمه
ENC ها به عنوان بخشی از اطلاعات ضروری در ناوبری، تضمین لازم برای ایمنی کشتی ها را فراهم می کنند. در سالهای اخیر، بسیاری از تصادفات در سرتاسر جهان مربوط به ENC [ 1 ]، به ویژه دقت عمق [ 2 ، 3 ] است. طبق بررسی برخورد کشتی توسط آژانس ایمنی دریایی اروپا [ 4 ]، از مجموع 1801 تجزیه و تحلیل رویداد تصادف بین سالهای 2014 تا 2019، 54 درصد به دسته «عمل انسانی» و 28 درصد به «شکستهای سیستم/تجهیزات» نسبت داده شده است. “. همانطور که در شکل 1 نشان داده شده است، 13 درصد از این موارد به دلیل اتصال به زمین بوده است. بنابراین، کاهش عملکرد نادرست ENC ها برای جلوگیری از وقوع حوادث برخورد کشتی مفید است. در اصل، ENC ها انتزاع و تعمیم دنیای واقعی هستند، از جمله عمق آب، توپوگرافی، بنادر، ساختمان ها و غیره. در فرآیند استفاده از نمودار ناوبری الکترونیکی دو بعدی (2D ENC)، کاربران باید نمادهای انتزاعی، موقعیت ها را ترجمه کنند. و جهتهایی به دنیای سهبعدی تخیلی برای درک، که درک برخی از مشکلات را برای کاربران به همراه دارد [ 5 ]. 3D ENC بصری تر و بیان خاصی از نمادهای انتزاعی است. این نه تنها میتواند واقعاً پدیدههای دریایی را در دنیای واقعی منعکس کند، بلکه ویژگیهای دریایی تولید شده در فعالیتهای دریایی را نیز نشان میدهد، که درک آسان و کاهش عملکرد نادرست ENC برای کاربران آسان است [ 6 ،7 ]. در گذشته، به دلیل محدودیت ظرفیت محاسباتی و ذخیره سازی، سیستم نمایش نمودار ناوبری الکترونیکی (ECDIS) فقط می تواند داده های دو بعدی را در یک هواپیما نمایش دهد و مقدار داده های نمایش داده شده محدود است. مدیریت موثر داده های یک محدوده وسیع و ساختار پیچیده دشوار است. با توسعه فناوری تجسم سه بعدی، داده های چند منبعی و اقیانوسی سه بعدی را می توان در ECDIS [ 8 ] نمایش داد و با سیستم اطلاعات جغرافیایی (GIS) [ 9 ]، وب و سایر فناوری ها [ 10 ] ترکیب کرد. بنابراین، ENC های سه بعدی باید یک سیستم نمایش جامع باشد که ENC های سنتی را با هیدرولوژی دریایی، محیط هواشناسی و سایر داده های چند منبعی ادغام کند.
تحقیق روی ENC های سه بعدی به توسعه فناوری تجسم سه بعدی بستگی دارد و همچنین الزامات اصالت، دقت و تعامل در تحقیقات فناوری تجسم سه بعدی را برآورده می کند. اصالت شرطی است که ENC ها بتوانند واقعاً همه نوع اطلاعات مربوط به محیط دریایی را در دنیای واقعی منعکس کنند. ENC سنتی انواع اطلاعات محیطی دریایی را در نمادهای برداری دوبعدی خلاصه می کند و آنها را با استفاده از گرافیک کامپیوتری نمایش می دهد. اگرچه می تواند به درستی پدیده های اقیانوسی را نشان دهد، اما محیط اقیانوس در دنیای واقعی نیست که باعث ایجاد مشکلاتی برای کاربران در فرآیند یادگیری و استفاده می شود. اعتبار سیستم اطلاعات جغرافیایی دریایی را می توان با بهبود نمادهای نقشه برداری ENC های سه بعدی افزایش داد [ 11]. دقت مستلزم آن است که دقت داده های نمایش داده شده در ENC بتواند الزامات ناوبری را برآورده کند. با توجه به حجم زیاد داده ها در ENC ها، به خصوص داده های عمق آب، معمولاً قبل از اعمال و تولید، باید الگوریتم فشرده سازی عمق آب را طی کند، اما همچنان باعث مشکل کاهش دقت داده ها می شود. دقت ENC های سه بعدی را می توان با بهبود روش مدیریت داده ها افزایش داد [ 12]. تعامل الزامی است ENC ها برای داشتن پرس و جوی سریع داده و تعاملات راحت، مانند تنظیم کانتور عمق ایمنی، نمایش عمق آب، برنامه ریزی مسیرها، و غیره، و قادر به چیدن سایر محصولات و خدمات داده، هرچند سنتی ENC دو بعدی بر اساس لایه بازیابی می تواند تابع پرس و جو داده جزئی دست یابد، اما برای ویژگی های تعامل. تحقیق و استفاده از S-100 می تواند مشکلات تعامل بین ویژگی ها را حل کند [ 13 ، 14 ]]. فناوری تجسم سه بعدی می تواند مشکلات اصالت، دقت و تعامل ENC های دو بعدی را حل کند و یکی از مشکلات در تحقق تجسم سه بعدی ENC ها ایجاد یک ساختار شاخص داده های مکانی مناسب با توجه به ساختار داده و توزیع فضایی ویژگی های ENC است. و کارایی مدیریت داده های مکانی را بهبود بخشد.
روش های نمایه سازی فضایی را می توان به دو دسته تک و ترکیبی تقسیم کرد. ساختارهای تک شاخص متداول عبارتند از پارتیشن بندی فضای دودویی (BSP)، درخت K بعدی، سلسله مراتب حجم محدود (BVHs)، چهار درخت، octree و R-tree و غیره. BSP و درخت K- بعدی برای صحنه های فضای باریک مناسب تر هستند کره محصور کننده BVHs اغلب برای هرس بصری بدن مهرهها استفاده میشود، چهار درخت برای توصیف دادههای هندسی مناسب است، و اکتره یک گسترش طبیعی از چهار درخت است که برای توصیف دادههای فضایی سهبعدی استفاده میشود. آنها برای سناریوهای فضای باز در مقیاس بزرگ مناسب هستند. با این حال، octree نمی تواند به صورت پویا ساختار درختی را مطابق با چیدمان واقعی شی تنظیم کند و در نتیجه عملکرد پرس و جو ضعیفی دارد [ 15 ، 16 ، 17 ]]. با نرم افزار مدیریت ابر نقطه لیدار می توان به تنظیم پویا دست یافت، اما پراکندگی دارد. جمل و همکاران از یک نوع ساختار چهار درختی برای حل مشکل نمایه سازی ویژگی های پویا استفاده کرد [ 18 ]. ما و همکاران یک مدل تجسم HiVision بر اساس R-tree پیشنهاد کرد که می تواند برای نمایش و هدایت داده های برداری فضایی در مقیاس بزرگ استفاده شود [ 19 ]. ژانگ و همکاران یک ساختار چهاردرختی نشانهدار برای پردازش دادههای مکان آب [ 20 ] پیشنهاد کرد.
در حال حاضر، هیچ ساختار شاخصی به طور کلی برای هر داده ای قابل اجرا در نظر گرفته نمی شود، زیرا داده های مختلف ساختار داده ها و ویژگی های مکانی متفاوتی دارند. ترکیب ساختارهای شاخص مختلف از طریق تجزیه و تحلیل ویژگی های داده های واقعی برای ایجاد یک ساختار شاخص ترکیبی ضروری است. گونگ و همکاران در سال 2012 یک روش مدیریت دادههای ابر نقطه لیزری را ارائه کرد که octree و 3D R-tree را ادغام میکرد، اما فقط مشکل مدیریت دادههای ابر نقطه لیزری سه بعدی در مقیاس بزرگ را حل کرد [ 21 ]. ساختار شاخص فضایی LOD-OR-tree پیشنهاد شده توسط ژنگ و همکاران. در GIS سه بعدی از یک شاخص octree برای محدود کردن فضای نشان داده شده توسط R-tree و کاهش سربار ایجاد شده توسط عملیات درج و حذف درخت R استفاده می کند [ 22]. وانگ و همکاران یک ساختار شاخص فضایی ترکیبی مبتنی بر GTM، 3DOR*-tree را پیشنهاد کرد که از مزایای پارتیشن فضایی سریع octree و جستجوی فضایی کارآمد درخت R*-3D استفاده کامل میکند، اما تنها از یک نوع ساختار داده پشتیبانی میکند [ 23 ] ].
داده های 3D ENC دارای ویژگی های منحصر به فرد خود هستند، از جمله انواع مختلف داده های اقیانوس، از جمله طیف وسیعی از داده های برداری فضایی و داده های شبکه با چگالی بالا. هنگام انتخاب ساختارهای شاخص فضایی، ساختار داده و ویژگی های فضایی داده های مختلف دریایی باید به طور جامع در نظر گرفته شود. بنابراین، با هدف مشکلات ساختار داده پیچیده و راندمان بازیابی فضایی پایین ENC های سه بعدی، این مقاله به تجزیه و تحلیل ویژگی های سه بعدی ویژگی های ENC، ایجاد مجموعه داده های ENC سه بعدی و ساختار شاخص فضایی ویژگی های ENC بر اساس چهار درخت و R-tree می پردازد. ساختار داده گرههای شاخص و ویژگیهای ENC را طراحی میکند و ساختار شاخص فضایی و جعبه محدود حداقل (MBB) را بهینه میکند.
ساختار سازمانی این مقاله در شکل 2 نشان داده شده است . بخش 2 فرآیند ایجاد یک مجموعه داده سه بعدی ENC را معرفی می کند. بخش 3 طراحی و بهینه سازی ساختار شاخص فضایی را معرفی می کند. بخش 4 کارایی ساختار شاخص فضایی را آزمایش می کند و جلوه تجسم ENC های سه بعدی را ارائه می دهد. در نهایت، نتیجه گیری و چشم انداز در بخش 5 ارائه شده است.
2. ایجاد مجموعه داده های 3D ENC
2.1. طبقه بندی ویژگی های جغرافیایی بر اساس S-101
از زمان انتشار S-100 توسط سازمان بین المللی هیدروگرافی (IHO) در ژانویه 2010 [ 24 ]]، محققان آن را به عنوان مسیر توسعه اطلاعات دریایی در آینده در نظر گرفته اند. این کشور متعهد به استفاده از S-100 برای پردازش اطلاعات تولید شده توسط فعالیتهای دریایی مختلف، برای اطمینان از ایمنی کشتیها است. بر اساس اس-100، بخش دریایی بین المللی در توسعه طیف وسیعی از محصولات و خدمات مشارکت داشت. IHO سری محصولات و خدمات S-10X را برای استانداردسازی تولید و کدگذاری ENC ها و هدایت مسیر توسعه ENC ها در آینده توسعه داده است. پس از آن، یک پایگاه داده جهانی نمودارهای ناوبری الکترونیکی (WEND) برای جلوگیری از مشکل بزرگ شدن و همپوشانی نمودارها ناشی از تفاوت در ظرفیت نقشه برداری کشورهای مختلف توسعه یافت [ 25 ].
S-101 طبقه بندی و کدگذاری انواع اطلاعات دریایی مورد نیاز برای اهداف ناوبری را فراهم می کند [ 26 ]. بر اساس S-57، برخی از ویژگی ها برای انطباق با توسعه سریع فناوری ناوبری به روز می شوند، از جمله 172 ویژگی جغرافیایی، 9 ویژگی ابرداده، 1 ویژگی نقشه برداری و 5 نوع اطلاعات. طبقهبندی IHO و بهروزرسانی ویژگیهای ENC در توصیف پدیدههای اقیانوسی دقیقتر است، هم ویژگیهای ابرداده و هم ویژگیهای جغرافیایی انتزاع دنیای واقعی هستند. با انتزاع صفات، ویژگی ها و روابط توپولوژیکی ویژگی ها، در نهایت در ECDIS نمایش داده می شوند.
S-101 ویژگی های جغرافیایی در ENC ها را به روشی دقیق تر طبقه بندی می کند و آنها را به 18 دسته کلی و 172 زیررده تقسیم می کند. همه ویژگی های جغرافیایی ویژگی های مربوط به ناوبری هستند. برای تسهیل تجسم سه بعدی ویژگی های جغرافیایی و ایجاد ساختار شاخص داده، این مقاله آنها را به ویژگی های محیطی، ویژگی های ماده و ویژگی های مجازی با توجه به ویژگی های سه بعدی آنها تقسیم می کند و تقسیم بندی خاص همه ویژگی های جغرافیایی را، همانطور که در جدول نشان داده شده است، ارائه می دهد. 1 . در جدول، ویژگی هایی که با فونت ایتالیک نشان داده می شوند، ویژگی های محیطی، ویژگی هایی که با فونت پررنگ نشان داده می شوند، ویژگی های ماده هستند، و ویژگی هایی که با فونت زیرخط دار نشان داده می شوند، ویژگی های مجازی هستند.
ویژگیهای محیطی محیط واقعی دریایی را توصیف میکنند، مانند صدا، جریان جزر و مد، جریان، ناحیه بستر دریا و غیره. چنین ویژگیهایی پدیدههای فیزیکی هستند که در واقعیت وجود دارند و به سطح اقیانوس، بستر دریا و خط ساحلی مربوط میشوند. ویژگیهای مواد، سیستمهای ناوبری واقعی هستند، مانند امکانات بندری، شناور جانبی، نور و غیره. چنین ویژگیهایی برای ناوبری کشتی و قایقرانی ایمن استفاده میشوند و مواد سه بعدی واقعی هستند. ویژگیهای مجازی ویژگیهای مصنوعی هستند، مانند خطوط ناوبری، کمک سیستم شناسایی خودکار مجازی (AIS) برای ناوبری، منطقه لنگرگاه و غیره که در واقعیت وجود ندارند اما ویژگیهای ضروری برای ناوبری ایمن هستند.
تقسیم ویژگی ها فرآیند تحقق درک کامپیوتر از دنیای واقعی است. هر نوع ویژگی توصیفی از اطلاعات انسانی و جغرافیایی است. در این مقاله، ویژگی های ENC عمدتاً به دو دلیل به این سه دسته تقسیم می شوند. اولین مورد این است که تقسیم بندی بر اساس صحنه های واقعی اقیانوس است که منجر به تجسم سه بعدی محیط دریایی می شود. دوم بهبود کارایی پرس و جو از شاخص فضایی ویژگی های 3D ENC است که در بخش 4 از فصل 3 توضیح داده خواهد شد.
2.2. مجموعه داده های سه بعدی ENC از ویژگی های جغرافیایی
در حال حاضر، استفاده از استاندارد S-100 هنوز در مرحله تحقیق و آزمایش است و یک مجموعه داده پایدار ENC مناسب برای تجسم سه بعدی تشکیل نشده است. بنابراین، با توجه به ویژگیها و ویژگیهای واقعی ویژگیها در ENC، مجموعه دادههای 3D ENC بر اساس دادههای دو بعدی ساخته شد، همانطور که در شکل 3 نشان داده شده است. سبز به این معنی است که این ویژگی به یک ویژگی محیطی تعلق دارد، زرد به این معنی است که ویژگی متعلق به یک ویژگی ماده است و سرخابی به این معنی است که ویژگی متعلق به یک ویژگی مجازی است.
2.2.1. ویژگی های محیطی
ویژگیهای زیستمحیطی نشاندادهشده در نمودار، حس محدودی از محیط دریایی، عمدتاً محیط جغرافیایی اقیانوس، از جمله سطح، بستر دریا و خشکی است. به عنوان مثال، برای توپوگرافی بستر دریا، دادههای دوبعدی را میتوان با استخراج مقادیر عمق نقاط عمق آب در نمودار و مقادیر مربوط به ویژگیهای عمق، مانند خط ساحلی و ایزوبات به عنوان دادههای ارتفاع، به دادههای سهبعدی با ارتفاع تبدیل کرد. به طور مشابه، برای ویژگیهای زمین مانند بنادر، سدها، پلها و غیره، دادههای ارتفاعی را میتوان با استفاده از مقادیر مشخصه در صورت وجود ویژگیهای شکل ایجاد کرد. اگر نه، داده های ارتفاع را می توان با توجه به نسبت های واقعی شبیه سازی کرد.
2.2.2. ویژگی های مواد
ویژگیهای ماده عمدتاً اشیایی هستند که به طور عینی وجود دارند و در زمین، دریا، زیر آب و بستر دریا در دنیای واقعی وجود دارند. اجسام روی خشکی عمدتاً ساختمانها، اسکلهها و فانوسهای دریایی و غیره هستند و اجسام روی دریا عمدتاً شناورها، فانوسهای دریایی و چراغها و غیره هستند. چنین ویژگیهایی با توجه به ویژگیهای خود مقادیر ارتفاع را استخراج میکنند. برای اشیاء زیر آب و اشیاء زیردریایی، عمدتاً موانع زیر آب، کشتی های غرق شده، سنگ ها، خطوط لوله زیردریایی، کابل ها و غیره، با توجه به ویژگی های عمق ویژگی ها به داده های ارتفاع سه بعدی تبدیل می شوند.
2.2.3. ویژگی های مجازی
ویژگی های مجازی عمدتاً ویژگی های مصنوعی هستند که با ویژگی های نقطه ای، منحنی و سطحی در ENC های دوبعدی نشان داده می شوند. ویژگی های نقطه ای عمدتاً شامل کمک مجازی AIS به نشانگرهای ناوبری و فاصله است. ویژگی های منحنی عمدتاً شامل انواع خطوط ناوبری، خطوط رادار و غیره می شود. چنین ویژگی هایی نشان دهنده یک منطقه است. به عنوان مثال، انواع مختلف مناطق آبراهه با توجه به قوانین ناوبری دریایی و عمق آب مختلف نشان داده شده است. خطوط آبراه در دو طرف یک منطقه کامل را تشکیل می دهند، در حالی که در صحنه سه بعدی، یک منطقه فضایی را نشان می دهند. ویژگیهای سطحی عمدتاً شامل لنگرگاه، اسکله، منطقه هشدار، منطقه ماهیگیری و غیره است. چنین ویژگیهایی همچنین نشاندهنده یک منطقه فضایی در یک محیط سه بعدی است که ارتباط نزدیکی با عمق آب مکان دارد. با توجه به افکت نمایش،
3. ساختار شاخص فضایی
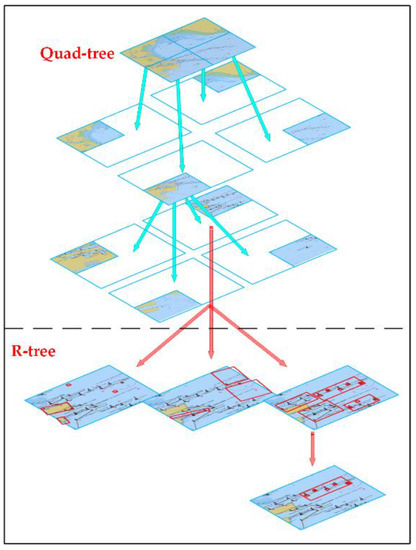
برای تحقق رندر زمان واقعی ENC های سه بعدی و بهبود کارایی رندر صحنه، این مقاله یک ساختار شاخص فضایی ترکیبی کارآمد بر اساس مجموعه داده های 3 بعدی ENC طراحی می کند. محیط واقعی دریایی یک میدان محیطی سه بعدی پیچیده با ویژگی های متعدد دریا، زمین و هوا است. داده های ویژگی های مختلف در ENC ها از طریق نقشه برداری اقیانوس شکل می گیرند. در میان این ویژگیها، فقط صداگذاری یک ویژگی نقطهای است که برای حفظ در قالب یک شبکه معمولی مناسب است، در حالی که سایر ویژگیها در صحنههای محلی اقیانوسی نسبتاً کم هستند و اگر از شبکه معمولی نیز برای حفظ استفاده شود، ذخیرهسازی زیادی وجود دارد. زباله ایجاد خواهد شد. بنابراین، شاخص های شبکه قابل اجرا نیستند. داده های ENC داده های فضایی سه بعدی در مقیاس بزرگ هستند. درختان BSP و KD بر اساس تقسیم بندی فضایی درختان باینری هستند. که برای صحنههایی با فضای باریک مناسبتر هستند، در حالی که چهار درخت، اکتره و درخت R برای دادههای مکانی محدودههای بزرگ مناسبتر هستند. گره ریشه ساختار شاخص چهاردرخت، کل فضا را به چهار زیرفضا تقسیم می کند، هر زیرفضا با همان نوع تفکر به چهار زیرفضا تقسیم می شود، در همه ابعاد به طور همزمان دارای ویژگی های ساختار ساده و کارایی قطعه بندی فضایی بالا است، اما ساختار درخت داده پراکنده نامتعادل است. راندمان درج و حذف بالا نیست. R-tree درختی متعادل با گرههای برگ در همان لایه است و گرههای برگ حاوی اشارهگرهایی به دادههای واقعی هستند که برای مناطق فضایی با توزیع دادههای نامنظم و پراکنده مناسب است. ترکیب این دو ساختار می تواند از اشکال ساختار شاخص بیش از حد عمیق ناشی از استفاده از یک ساختار شاخص به تنهایی جلوگیری کند. علاوه بر این، اگرچه octree در مقایسه با quadtree بیشتر در بازیابی دادههای فضایی سهبعدی استفاده میشود، با توجه به اینکه ویژگیهای ENC با ویژگیهای فضایی سهبعدی عمومی متفاوت است، بیشتر ویژگیها بر روی سطح دریا متمرکز شدهاند، و تعداد کمی در خشکی و بستر دریا توزیع میشوند، استفاده از octree پیچیدگی الگوریتم را افزایش میدهد، که برای بهبود کارایی بازیابی مفید نیست. بنابراین، یک ENC 3D دارای ساختار شاخص ترکیبی از ساختار چهار درختی و R-tree، به نام 3DENCQR-tree، برای تحقق بارگذاری و ترسیم بیدرنگ مدلهای ویژگی در صحنههای سهبعدی طراحی شد. بیشتر ویژگیها بر روی سطح دریا متمرکز شدهاند و تعداد کمی در خشکی و بستر دریا توزیع شدهاند، استفاده از octree پیچیدگی الگوریتم را افزایش میدهد، که برای بهبود کارایی بازیابی مفید نیست. بنابراین، یک ENC 3D دارای ساختار شاخص ترکیبی از ساختار چهار درختی و R-tree، به نام 3DENCQR-tree، برای تحقق بارگذاری و ترسیم بیدرنگ مدلهای ویژگی در صحنههای سهبعدی طراحی شد. بیشتر ویژگیها بر روی سطح دریا متمرکز شدهاند و تعداد کمی در خشکی و بستر دریا توزیع شدهاند، استفاده از octree پیچیدگی الگوریتم را افزایش میدهد، که برای بهبود کارایی بازیابی مفید نیست. بنابراین، یک ENC 3D دارای ساختار شاخص ترکیبی از ساختار چهار درختی و R-tree، به نام 3DENCQR-tree، برای تحقق بارگذاری و ترسیم بیدرنگ مدلهای ویژگی در صحنههای سهبعدی طراحی شد.
این روش عمدتاً شامل سه مرحله است. ابتدا ساختار داده و ساختار گره شاخص ویژگی های ENC بر اساس ساختار داده چهار درخت و R-tree طراحی شده است. دوم، با توجه به مقدار آستانه تقسیم بندی چهار درخت، ویژگی ها تقسیم شده و چهار درخت ایجاد می شود. با توجه به ویژگیهای سهبعدی ویژگیهای ENC، سه درخت R در گرههای برگ چهار درخت برای دستیابی به تقسیم فضایی سه نوع ویژگی ساخته میشوند و سپس درخت 3DENCQR ساخته میشود. سوم، بر اساس 3DENCQR-درخت برای دستیابی به پرس و جو داده های ویژگی های ENC، فرآیند پرس و جو عمدتاً شامل پرس و جوی فرعی چهار درختی، زیرپرس و جوی طبقه بندی ویژگی های ENC و زیرپرس و جوی درخت R است.
3.1. ساختار داده ویژگی های 3D ENC
یک ساختار داده معقول می تواند کارایی ساخت و پرس و جو ساختار شاخص درختی 3DENCQR را بهبود بخشد، بنابراین این مقاله ابتدا ساختار داده ویژگی های 3D ENC را طراحی کرد. این ساختار داده را می توان به پنج بخش تقسیم کرد: ساختار گره بدون برگ چهاردرخت، ساختار گره برگ چهاردرخت، ساختار گره غیر برگ درخت R، ساختار گره برگ درخت R، و ساختار ویژگی های ENC، همانطور که در شکل 4 نشان داده شده است.. گره های چهاردرختی غیر برگ شامل پوششی از گره ها، اعداد نقاط، اشاره گر گره های والد و گره های فرزند هستند. گره های برگ چهاردرخت شامل پاکتی از گره ها، اعداد نقطه، اشاره گر گره والد و گره ریشه R-tree است. گره های غیر برگ درخت R شامل پاکتی از گره ها، شماره های ویژگی، اشاره گر گره والد و گره فرزند هستند. گره برگ R-tree شامل پاکتی از گره ها، شماره های ویژگی، اشاره گر گره والد و اطلاعات ویژگی های ENC است. ساختار ویژگیهای ENC شامل پوششی از ویژگیها، کوچکترین کادر محدود (SMBB)، انواع ویژگیها، اطلاعات ویژگی، اطلاعات هندسه ویژگی، اطلاعات ویژگی ویژگی و غیره است. پاکت حداقل جعبه مرزی (MBB) از ویژگی ها است، به این معنی که یک جعبه مرزی مستطیلی حاوی ویژگی های هندسی است که با محورها تراز است.
3.2. ساختارهای شاخص فضایی از ویژگی های 3D ENC
بر خلاف چشم انداز سه بعدی رایج زمین، ویژگی های ENC ممکن است در برخی مناطق متمرکز باشد، در حالی که برخی دیگر ممکن است تنها مقدار کمی داده داشته باشند. در منطقه زمینی نزدیک بندر تیانجین، ویژگی ها عمدتاً ساختمان ها و تأسیسات بندری است و تراکم داده ها در این منطقه نسبتاً کم است. در منطقه اقیانوسی، ویژگیهای کمتری در دریای آزاد و منطقه غیرآبی وجود دارد، در حالی که ویژگیهای بیشتری در نزدیکی بندر و آبراه وجود دارد و تراکم دادهها در این منطقه نسبتاً بالا است. به دلیل توزیع نابرابر ویژگی های ENC، استفاده از یک ساختار شاخص تک مشکل ساختار شاخص بسیار عمیق را خواهد داشت، اما با استفاده از روش شاخص ترکیب چهار درخت و درخت R می توان به شاخص داده کارآمدتری دست یافت. ساختارهای شاخص فضایی ویژگی های سه بعدی ENC در شکل 5 نشان داده شده است.
مراحل ساخت ساختار شاخص 3DENCQR-tree به شرح زیر است.
-
اطلاعات تمام ویژگی های ENC را بخوانید، پاکت و SMBB ویژگی های ENC را محاسبه کنید و اطلاعات موقعیت همه نقاط در ویژگی ها را ذخیره کنید. از آنجایی که ویژگیهای ENC معمولاً اطلاعات ارتفاعی در فضا ندارند، این مقاله یک مقدار ارتفاع را برای نقطه ویژگیها با توجه به ویژگی تعیین میکند و نسبت ویژگیها را برای تشکیل یک ویژگی فضای سه بعدی ترسیم میکند.
-
یک چهار درخت ایجاد کنید و ویژگی های ENC E را به ترتیب وارد کنید. اگر تعداد نقاط گره کمتر از آستانه QK باشد، به درج ادامه دهید. اگر از آستانه QK فراتر رود، گره چهاردرخت به طور مساوی به چهار گره فرعی تقسیم می شود و ویژگی های ENC گره دوباره به گره های فرعی مربوطه تخصیص می یابد.
-
R-درخت ها بر روی گره های برگ چهاردرخت ساخته شدند که تقسیم فضایی را تکمیل کردند. با توجه به انواع ویژگیهای ENC، ویژگیهای محیطی، ویژگیهای ماده و ویژگیهای مجازی یکی یکی در سه درخت R درج شدند.
-
در فرآیند درج ویژگی های ENC E در گره R-tree L، اگر گره L به آستانه ویژگی های گره برگ شماره RK نرسد، ویژگی E درج می شود. در غیر این صورت، گره ها برای به دست آوردن دو گره فرزند که شامل تمام ویژگی های ویژگی های E و گره L هستند، تقسیم می شوند و سپس از گره برگ به گره ریشه تنظیم می شوند.
-
مرحله 4 به صورت بازگشتی انجام می شود تا زمانی که تمام ویژگی های ENC در درخت R برای تکمیل ساخت ساختار شاخص 3DENCQR-tree درج شود.
3.3. پرس و جو فضایی از ویژگی های 3D ENC
روش پرس و جو 3DENCQR-tree عمدتاً یک پرس و جو ناحیه فضایی است و فرآیند پرس و جو به شرح زیر است.
-
ناحیه پرس و جو SA را تنظیم کنید.
-
از گره ریشه چهاردرخت پرس و جو کنید و رابطه فضایی بین هر گره QN در چهار درخت و SA را محاسبه کنید. اگر QN توسط SA گنجانده شود، تمام گره های برگ QN به عنوان نتایج پرس و جو برگردانده می شوند و فرآیند پرس و جو فضایی QN را متوقف می کنند. اگر QN و SA از هم جدا شوند، نتیجه پرس و جو وجود ندارد و فرآیند جستجوی فضایی QN متوقف می شود. در صورت ایجاد روابط دیگر، عملیات query در گره های فرزند QN تکرار می شود تا زمانی که به گره برگ چهار درخت برسد و سپس مرحله 3 انجام می شود.
-
با شروع از تمام گره های برگ برگشتی از چهار درخت، به ترتیب گره های ریشه سه درخت R را جستجو کنید و رابطه فضایی بین هر گره RN درخت R و SA را محاسبه کنید. اگر RN توسط SA گنجانده شود، تمام گره های برگ این RN به عنوان نتایج پرس و جو برگردانده می شوند و فرآیند پرس و جو فضایی این RN متوقف می شود. اگر RN و SA از هم جدا شوند، نتیجه پرس و جو وجود ندارد و فرآیند جستجوی فضایی این RN متوقف می شود. در صورت ایجاد روابط دیگر، عملیات query در گره های فرزند RN تکرار می شود تا زمانی که به گره برگ درخت R برسد و مرحله 4 انجام می شود.
-
از تمام گره های برگ برگشتی R-tree بازدید کنید و به طور مکرر رابطه بین هر ویژگی ENC و SA را محاسبه کنید. سپس، ویژگی های ENC موجود در SA یا قطع شده با SA به نتیجه پرس و جو اضافه می شود تا زمانی که همه ویژگی ها محاسبه شوند.
3.4. روش بهینه سازی
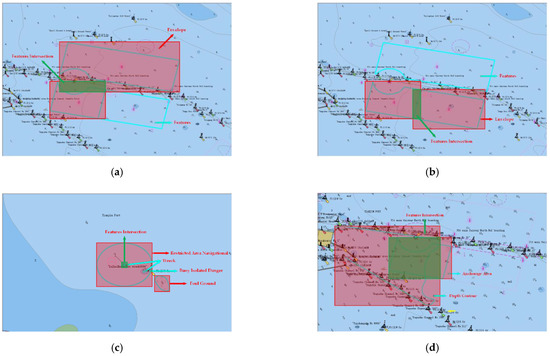
اگرچه عمق درخت R را می توان به طور مصنوعی کنترل کرد و انعطاف پذیرتر است، عملکرد پرس و جو آن به میزان پوشش و همپوشانی بستگی دارد. هنگامی که حجم زیادی از داده در یک منطقه خاص وجود دارد و شکل آن پیچیده است، به راحتی می توان مقدار زیادی از MBB درخت R را روی هم قرار داد و بر کارایی پرس و جو تأثیر گذاشت. چنین مشکلاتی بیشتر برای ویژگیهای ENC رخ میدهد، زیرا در مناطق دریایی با شرایط پیچیده یا نزدیک به بنادر و مسیرها، توزیع ویژگیها نسبتاً متراکم است و به راحتی همپوشانی دارند. به عنوان مثال، در بندر تیانجین نه تنها ویژگی های مجازی مانند قطعات خطوط ترافیکی، مناطق لنگرگاه و ناوبری منطقه محدود وجود دارد، بلکه ویژگی های مواد مانند نور و شناورها نیز وجود دارد. و همچنین ویژگی های محیطی مانند صدا و مناطق بستر دریا موجود در کل ENC. همانطور که در نشان داده شده استشکل 6 ، خط آبی نمایانگر ویژگی های ENC، ناحیه قرمز نمایانگر پوشش ویژگی ها، و ناحیه سبز نمایانگر ناحیه همپوشانی ویژگی ها است. وقتی همه ویژگیهای ENC نمایش داده میشوند، چندین نمایشگر با هم تداخل دارند از ویژگیهای ENC. در این حالت، استفاده از R-tree برای ایندکس کردن مستقیم ویژگی های ENC، ناگزیر کارایی پرس و جو را کاهش می دهد.
برای حل این مشکل، اول از همه، برای برخی از منحنی های مساحت بزرگ و ویژگی های سطح، از SMBB برای جایگزینی MBB استفاده می شود تا مساحت جعبه مرزی خارجی ویژگی ها کاهش یابد. همانطور که در شکل 7 نشان داده شده است ، ناحیه زرد نشان دهنده SMBB ویژگی ها است. در مقایسه با شکل 6 a,b، سطح همپوشانی ویژگی ها حذف یا کاهش می یابد.
محاسبه SMBB از الگوریتم بستن چرخشی استفاده می کند و الگوریتم به صورت زیر پیاده سازی می شود.
-
پوشش ویژگی های ENC، MaxX، MinX، MaxY، و MinY را به دست آورید، چهار مماس را با توجه به مرز محدوده بسازید، و دو مجموعه “بسته” را تعیین کنید.
-
اگر یک یا دو خط با یک یال منطبق است، مساحت مستطیل را که توسط چهار خط تعیین می شود محاسبه کنید و آن را به عنوان حداقل فعلی ذخیره کنید. در غیر این صورت، حداقل فعلی به عنوان بی نهایت تعریف می شود.
-
خطوط را در جهت عقربه های ساعت بچرخانید تا یکی از آنها با یکی از اضلاع چند ضلعی منطبق شود.
-
مساحت مستطیل جدید را محاسبه کرده و آن را با حداقل فعلی مقایسه کنید. اگر کمتر از حداقل فعلی باشد، بهروزرسانی میشود و اطلاعات مستطیلی را که حداقل را تعیین میکند، ذخیره میکند.
-
مراحل 3 و 4 را تکرار کنید تا خط با زاویه ای بیشتر از 90 درجه بچرخد.
-
حداقل مساحت مستطیل محصور را چاپ کنید و اطلاعات مستطیل را ذخیره کنید.
در مرحله دوم، ویژگی های ENC به سه دسته ویژگی های محیطی، ویژگی های ماده و ویژگی های مجازی تقسیم می شوند. دلیل چنین توجهی این است که از یک سو، ویژگیهای یک دسته معمولاً کمتر همپوشانی دارند. به عنوان مثال، برای ویژگیهای محیطی، ویژگیهای خشکی و ویژگیهای سطح دریا با هم همپوشانی ندارند، همچنین ویژگیهای سطح دریا و بستر دریا در فضا همپوشانی ندارند. برای ویژگی های ماده، دو شناور واقعی با هم همپوشانی ندارند. برای ویژگیهای مجازی، اگر چه بین برخی از راهها یک تلاقی وجود خواهد داشت، اما همانطور که در شکل 8 الف نشان داده شده است، با ناحیه لنگرگاه و ناوبری منطقه محدود همپوشانی ندارند. از طرفی همپوشانی های بیشتری بین این سه ویژگی وجود دارد. همانطور که در شکل 8 نشان داده شده استb، ناحیه قرمز نشان دهنده ایزوبات در ویژگی های محیطی، ناحیه سبز نشان دهنده فانوس دریایی در ویژگی های ماده، و ناحیه زرد نشان دهنده منطقه محدودیت ناوبری در ویژگی های مجازی است. بین انواع مختلف ویژگی ها همپوشانی زیادی وجود دارد.
4. نتایج و بحث
در این مقاله، 42 ENC در ناحیه دریای شمالی چین به عنوان دادههای تجربی برای ساخت مجموعه دادههای ENC سهبعدی انتخاب شدند که بر اساس تعداد ویژگیهای ENC تقسیم شدند و چهار گروه از دادههای تجربی ساخته شدند. تعداد ویژگی های ENC در این چهار گروه 3390، 20183، 69256 و 102506 بوده است. اطلاعات ENC در جدول 2 نشان داده شده است .
4.1. تجزیه و تحلیل همپوشانی ویژگی های ENC
در این مقاله، میزان همپوشانی ویژگیهای ENC مورد آزمایش و تحلیل قرار گرفت. نمودار ناوبری الکترونیکی CN323101.000 که ENC منطقه بندر تیانجین است با مجموع 3107 ویژگی شامل 1736 ویژگی محیطی، 628 ویژگی ماده و 743 ویژگی مجازی استفاده شد. نتایج آزمون در جدول 3 نشان داده شده است. در این مقاله 1526 ویژگی منحنی و ویژگی های سطحی به عنوان داده های تجربی انتخاب شدند. دلیل انتخاب نشدن ویژگیهای نقطهای این است که احتمال همپوشانی ویژگیهای نقطهای کم است و حتی اگر همپوشانی داشته باشند، ناحیه همپوشانی کوچک است و میتوان آن را نادیده گرفت. مساحت متوسط MBB این ویژگی ها 30472 کیلومتر مربع است . پس از بهینه سازی، میانگین مساحت 23387 کیلومتر مربع می شود، 23251% کاهش یافت که نشان می دهد مساحت MBB ویژگی های ENC را می توان با استفاده از SMBB به میزان قابل توجهی کاهش داد. پس از آن، سطح همپوشانی بین هر دو ویژگی محاسبه شد. قبل از بهینه سازی، میانگین مساحت همپوشانی ویژگی ها 19002 کیلومتر مربع بود که در آن مساحت همپوشانی همان نوع ویژگی ها 15790 کیلومتر مربع و انواع مختلف ویژگی ها 24364 کیلومتر مربع بود که نشان می دهد پس از طبقه بندی ویژگی های ENC ، سطح همپوشانی بین هر ویژگی به طور قابل توجهی کاهش می یابد. پس از بهینه سازی، میانگین مساحت ویژگی های همپوشانی 12509 کیلومتر مربع است که 34.170٪ کاهش یافته است که در آن مساحت همپوشانی همان نوع ویژگی ها 9731 کیلومتر مربع است .، 38,372% کاهش یافته است و مساحت همپوشانی بین انواع مختلف ویژگی ها 17,173 کیلومتر مربع است که 29,515% کاهش یافته است که نشان می دهد اولاً سطح همپوشانی ویژگی ها به طور قابل توجهی کاهش می یابد و MBB برخی ویژگی ها دیگر همپوشانی ندارند. ثانیاً، مساحت همپوشانی یک نوع ویژگی در مقایسه با ویژگی های مختلف به طور قابل توجهی کاهش می یابد و مساحت همان نوع ویژگی ها نیز نسبت به قبل از بهینه سازی به طور قابل توجهی کاهش می یابد.
4.2. نتایج آزمون ساختار شاخص فضایی
برای ارزیابی کارایی درخت 3DENCQR پیشنهاد شده در این مقاله برای رندر بلادرنگ صحنههای سهبعدی، زمان ساخت و زمان پرسوجوی چهار درخت، درخت R و درخت 3DencQR مقایسه و تجزیه و تحلیل شد. طول و عرض جغرافیایی محدوده پرس و جو روی 0.4 درجه تنظیم شد.
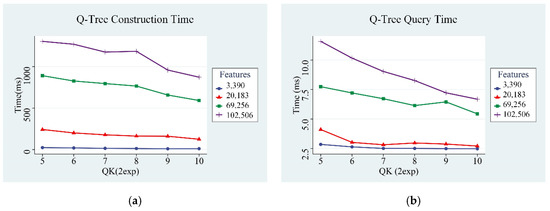
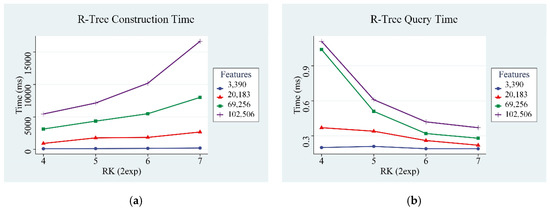
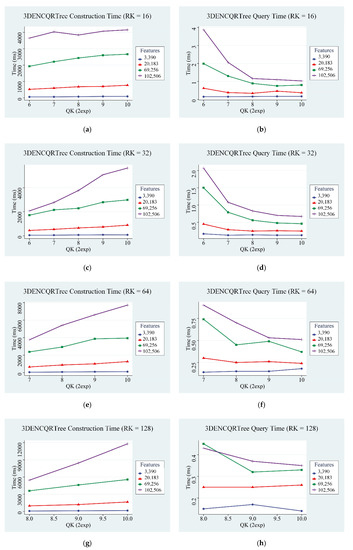
در ساختار شاخص ترکیبی، آستانه تقسیم بندی QK چهار درخت و RK درخت R تأثیر زیادی بر ساخت و زمان پرس و جو دارد. برای یافتن مناسبترین آستانه تقسیمبندی، لازم بود که رابطه بین ساخت و زمان پرسوجو از چهار درخت و درخت R و آستانه تقسیمبندی تحلیل شود. شکل 9 نشان می دهد که وقتی آستانه تقسیم بندی چهار درخت افزایش می یابد، زمان ساخت کاهش می یابد، در حالی که زمان پرس و جو هیچ ارتباط آشکاری با آستانه نشان نمی دهد. دلیل احتمالی این است که زمان پرس و جو تا حدی با توزیع فضایی ویژگی ها ارتباط دارد. شکل 10نشان می دهد که زمان ساخت درخت R با افزایش آستانه RK افزایش می یابد و زمان پرس و جو با افزایش RK کاهش می یابد. سپس، ساخت درخت 3DENCQR و زمان پرس و جو چهار مجموعه داده مختلف را آزمایش کردیم. شکل 11 رابطه بین ساخت و زمان پرس و جو 3DENCQR-Tree و QK را در RK های مختلف نشان می دهد. شکل 11 a,c,e,g روابط بین ساخت 3DENCQR-tree و آستانه های QK مختلف در RK = 16، RK = 32، RK = 64، و RK = 128 را نشان می دهد. شکل 11b,d,f,h روابط بین پرس و جو درخت 3DENCQR و آستانه های QK مختلف در RK = 16، RK = 32، RK = 64، و RK = 128 را نشان می دهد. نتایج نشان می دهد که وقتی QK = 256، RK = 32, 3DENCQR-tree زمان ایجاد و پرس و جو کمتری دارد و عملکرد شاخص بهترین است.
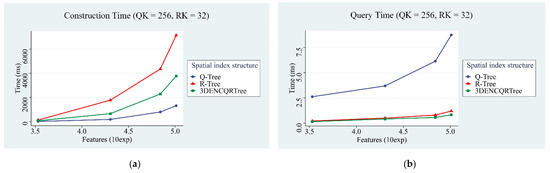
شکل 12 الف نشان می دهد که زمان ساخت چهاردرخت کوچکترین است، زمان ساخت درخت 3DENCQR کمی بیشتر از چهار درخت است و زمان ساخت درخت R طولانی ترین است. این نشان میدهد که وقتی مقدار دادهها زیاد است، مقدار تقسیمبندی و تنظیم درخت R افزایش مییابد و عمق درخت R را بیش از حد بزرگ میکند. با طبقهبندی ویژگیهای ENC، درخت 3DENCQR میتواند از مشکل عمیق بودن ساختار شاخص بدون افزایش زمان ساخت جلوگیری کند. شکل 12b نشان می دهد که زمان پرس و جو از چهار درخت طولانی ترین است، پس از آن R-tree، و 3DENCQR-tree کوتاه ترین است. این نشان می دهد که روش پرس و جو با استفاده از SMBB می تواند تا حد زیادی میزان تکرار پرس و جو از ویژگی ها را کاهش دهد. بنابراین، کارایی بازیابی ویژگی ها را بهبود می بخشد. بنابراین، با ترکیب ساخت و کارایی پرس و جو ساختار شاخص ترکیبی 3DENCQR-tree، می توان نشان داد که ساختار شاخص ترکیبی می تواند به طور موثر داده های ENC را مدیریت کند و کارایی ترسیم 3D ENC را بهبود بخشد.
4.3. تجسم 3D ENC
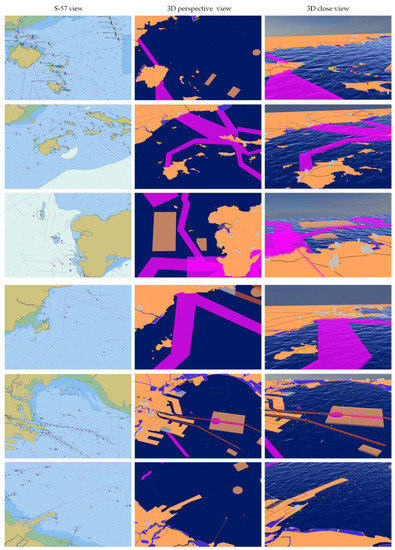
در این مقاله، ویژگی های ENC در یک صحنه سه بعدی به شکل هندسی ترسیم شد و سطح دریا با روش تبدیل فوریه سریع (FFT) ترسیم شد [ 27 ]. با استفاده از ساختار شاخص درخت 3dENCQR برای پرس و جو منطقه ای، نرخ فریم رندر در بیش از 60 فریم پایدار است و تقاضا برای رندر زمان واقعی صحنه های سه بعدی را تحقق می بخشد. جلوه تجسم سه بعدی در شکل 13 نشان داده شده است . افسانه ویژگی های ENC در جدول 4 نشان داده شده است. ستون اول شکل نمای S-57 و دو ستون آخر نمای پرسپکتیو سه بعدی و نمای نزدیک سه بعدی مکان مربوطه است. میتوانید آزادانه در نمای سهبعدی پرسه بزنید، به طور مستقیم کل صحنه را از طریق نمای پرسپکتیو مشاهده کنید، و جزئیات بیشتری از ویژگیها را در نمای نزدیک ببینید.
5. نتیجه گیری ها
ENC 3D می تواند عملکرد نادرست را کاهش دهد و راحتی استفاده از نمودار را با انعکاس محیط دریایی و ویژگی های مختلف دریایی به طور واقعی، دقیق و مستقیم بهبود بخشد. این مسیر توسعه آینده ENC ها است. برای دادههای محیط دریایی ناهمگن چند منبعی، استفاده از یک ساختار شاخص فضایی کارآمد برای مدیریت مؤثر دادههای ENC سه بعدی بسیار مهم است، زیرا کارایی ساخت و پرس و جو ساختار شاخص فضایی مستقیماً بر کارایی تجسم سه بعدی تأثیر میگذارد. برای دستیابی به ویژگیهای ENC در رندر لحظهای صحنه سهبعدی، در این مقاله، بر اساس استاندارد S-101 و ویژگیهای سهبعدی برای طبقهبندی ویژگیهای ENC و ایجاد مجموعه دادههای ENC سهبعدی، یک ساختار شاخص فضایی ترکیبی بر اساس پیشنهاد شد. چهار درخت و R-tree و ENC دارای ساختار داده هستند. این به پارتیشن فضای چهاردرختی سریع و R-tree به طور کارآمد، مزایای پرس و جو فضایی را کامل کرد و در نهایت، ساختار شاخص فضایی بهینه شد. با تجزیه و تحلیل همپوشانی ویژگیهای ENC، تأیید شد که طبقهبندی ویژگیهای ENC میتواند کارایی پرس و جو ساختار شاخص ترکیبی را بهبود بخشد. از طریق تجزیه و تحلیل ساخت ساختار شاخص و زمان پرس و جو، کارایی بالای پرس و جو 3DENCQR-tree تأیید شد. نتایج نشان داد که این ساختار شاخص فضایی توانایی ساخت و پرس و جو سریع را دارد، می تواند به طور موثر داده های ENC سه بعدی را نمایه کند و کارایی رندر نمودار سه بعدی را بهبود بخشد. با تجزیه و تحلیل همپوشانی ویژگیهای ENC، تأیید شد که طبقهبندی ویژگیهای ENC میتواند کارایی پرس و جو ساختار شاخص ترکیبی را بهبود بخشد. از طریق تجزیه و تحلیل ساخت ساختار شاخص و زمان پرس و جو، کارایی بالای پرس و جو 3DENCQR-tree تأیید شد. نتایج نشان داد که این ساختار شاخص فضایی توانایی ساخت و پرس و جو سریع را دارد، می تواند به طور موثر داده های ENC سه بعدی را نمایه کند و کارایی رندر نمودار سه بعدی را بهبود بخشد. با تجزیه و تحلیل همپوشانی ویژگیهای ENC، تأیید شد که طبقهبندی ویژگیهای ENC میتواند کارایی پرس و جو ساختار شاخص ترکیبی را بهبود بخشد. از طریق تجزیه و تحلیل ساخت ساختار شاخص و زمان پرس و جو، کارایی بالای پرس و جو 3DENCQR-tree تأیید شد. نتایج نشان داد که این ساختار شاخص فضایی توانایی ساخت و پرس و جو سریع را دارد، می تواند به طور موثر داده های ENC سه بعدی را نمایه کند و کارایی رندر نمودار سه بعدی را بهبود بخشد.
اختصارات
| 2 بعدی ENC | نمودار ناوبری الکترونیکی دو بعدی |
| 3D ENC | نمودار ناوبری الکترونیکی سه بعدی |
| AIS | سیستم شناسایی خودکار |
| BSP | پارتیشن بندی فضای باینری |
| BVH | سلسله مراتب حجم محدود |
| ECDIS | نمایش نمودار الکترونیکی و سیستم اطلاعات |
| ENC | نمودارهای ناوبری الکترونیکی |
| FFT | تبدیل فوریه سریع |
| GIS | سیستم اطلاعات جغرافیایی |
| IHO | سازمان بین المللی هیدروگرافی |
| MBB | حداقل جعبه محدود کننده |
| اس-100 | مدل داده های هیدرولوژیکی جهانی S-100 |
| S-101 | مدل داده های هیدرولوژیکی جهانی S-101 |
| S-57 | مدل داده های هیدرولوژیکی جهانی S-57 |
| SMBB | کوچکترین جعبه محدود کننده حداقل |
| WEND | پایگاه داده نمودارهای ناوبری الکترونیکی در سراسر جهان |
منابع
- Turna، İ. Öztürk، OB یک تحلیل علّی در تصادفات زمینی مرتبط با ECDIS. سازه دریایی کشتی. 2020 ، 15 ، 792-803. [ Google Scholar ] [ CrossRef ]
- Weintrit، A. دقت داده های عمق سنجی در نمودارهای ناوبری الکترونیکی. علمی جی. ماریت. دانشگاه شچک. زسز ناوک. آکاد. مور W Szczec. 2018 ، 55 ، 60-69. [ Google Scholar ]
- آکومی، ن. تأثیر دقت داده های نمودار بر ایمنی ناوبری. TransNav 2020 ، 14 ، 411-415. [ Google Scholar ] [ CrossRef ]
- آژانس ایمنی دریایی اروپا بررسی اجمالی سالانه تلفات و حوادث دریایی ; آژانس ایمنی دریایی اروپا: لیسبون، پرتغال، 2020. [ Google Scholar ]
- گورالسکی، آر. ری، سی. Gold, C. کاربردها و مزایا برای توسعه سیستم های تجسم سه بعدی کارتوگرافی در حمایت از ایمنی دریایی. TransNav-Int. جی مار ناویگ. Saf. دریا ترانسپ. 2011 ، 5 ، 423-431. [ Google Scholar ]
- Weintrit، A. شفاف سازی، سیستم سازی و طبقه بندی کلی سیستم های نمودار الکترونیکی و نمودارهای ناوبری الکترونیکی مورد استفاده در ناوبری دریایی. بخش 1-سیستم های نمودار الکترونیکی. TransNav-Int. جی مار ناویگ. ساف دریا ترانسپ. 2018 ، 12 ، 471-482. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- Weintrit، A. Clarification Systematization و طبقه بندی کلی سیستم های نمودار الکترونیکی و نمودارهای ناوبری الکترونیکی مورد استفاده در ناوبری دریایی. قسمت 2 نمودارهای ناوبری الکترونیکی. TransNav-Int. جی مار ناویگ. Saf. دریا ترانسپ. 2018 ، 12 ، 769-780. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- آرسنال، آر. اسمیت، LT; ور، سی. مایر، لس آنجلس; Plumlee, MD ترکیب اطلاعات در یک نمایشگر سه بعدی نمودار آینده. در مجموعه مقالات کنفرانس US Hydro 2003، Biloxi، MS، ایالات متحده آمریکا، 24-27 مارس 2003. [ Google Scholar ]
- گورالسکی، آر. Gold, C. Marine GIS: پیشرفت در تجسم سه بعدی برای GIS پویا . Springer: برلین/هایدلبرگ، آلمان، 2008; ص 401-416. [ Google Scholar ]
- لیو، تی. ژائو، دی. Pan, M. ایجاد تصویر سه بعدی برای ECDIS آینده بر اساس زمین دیجیتال. جی. ناویگ. 2014 ، 67 ، 1049-1068. [ Google Scholar ] [ CrossRef ]
- طلا، سی. چاو، م. زیشکو، م. Goralski, R. تجسم جغرافیایی سه بعدی: GIS دریایی ; Springer: برلین/هایدلبرگ، آلمان، 2005; ص 17-28. [ Google Scholar ]
- گریشنتسف، آ. Elsukov, A. طراحی و تجزیه و تحلیل الگوریتم برای دوخت صاف نمودارهای ناوبری الکترونیکی. در مجموعه مقالات کنفرانس بین المللی IEEE 2018 در زمینه مهندسی برق و فوتونیک (EExPolytech)، سن پترزبورگ، روسیه، 22 تا 23 اکتبر 2018. [ Google Scholar ]
- پارک، دی. Park, S. E-Navigation-حمایت از سیستم مدیریت داده برای داده های مبتنی بر S-100. چندتایی. ابزارهای کاربردی 2015 ، 74 ، 6573-6588. [ Google Scholar ] [ CrossRef ]
- پارک، دی. پارک، S. یکپارچه سازی در سطح نحوی و نمایش داده های مبتنی بر S-100 دامنه های متعدد برای ناوبری الکترونیکی. خوشه. محاسبه کنید. 2017 ، 20 ، 721-730. [ Google Scholar ] [ CrossRef ]
- لین، اچ. هوانگ، پی. Hsu، K. یک روش نمایه سازی جدید با استفاده از ذخیره سازی بالا و کارایی بازیابی برای پایگاه های داده فضایی بزرگ. Inf. نرم افزار تکنولوژی 2007 ، 49 ، 817-826. [ Google Scholar ] [ CrossRef ]
- زو، س. گونگ، جی. Zhang، Y. یک روش شاخص فضایی سه بعدی R-tree کارآمد برای محیط های جغرافیایی مجازی. ISPRS J. Photogramm. Remote Sens. 2007 , 62 , 217-224. [ Google Scholar ] [ CrossRef ]
- وانگ، دبلیو. ژوان، ز. سان، ال. جیانگ، ز. Shang, J. BRLO-Tree: یک ساختار داده مورد استفاده برای رندر صحنه پویا GIS سه بعدی. سایبرن. Inf. تکنولوژی 2015 ، 15 ، 124-137. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- طیب، ج. روش نمایه سازی ویژگی پویا مبتنی بر چهار درخت. محاسبه کنید. J. 1998 , 41 , 185-200. [ Google Scholar ] [ CrossRef ]
- ما، م. وو، ی. اویانگ، ایکس. چن، ال. لی، جی. Jing, N. HiVision: تجسم سریع داده های برداری فضایی در مقیاس بزرگ. محاسبه کنید. Geosci. 2021 ، 147 ، 104665. [ Google Scholar ] [ CrossRef ]
- ژانگ، ZJ تحقیق در مورد روش شاخص داده های بزرگ در آب با اطلاعات مکان. دکتری پایان نامه، دانشگاه دریایی دالیان، دالیان، چین، 2015; پ. 156. [ Google Scholar ]
- گونگ، جی. شنگنان، KE; Qing، ZHU یک روش مدیریت کارآمد برای داده های ابر نقطه ای بر اساس Octree و 3D R-tree. Acta Geod. Et Cartogr. گناه 2012 ، 9 ، 597-604. [ Google Scholar ]
- Kun، ZG; Guo، LX؛ Hui, Y. تحقیق در مورد ساختار شاخص فضایی درخت LOD-OR در GIS سه بعدی. گاو نر Surv. نقشه 2005 ، 5 ، 27-29. [ Google Scholar ]
- وانگ، ی. Lv، H.; Ma، Y. ساختار شاخصسازی فضایی ترکیبی مدلگرا چهاروجهی زمینشناسی بر اساس Octree و 3D R*-tree. عرب جی. ژئوشی. 2020 ، 13 ، 1-11. [ Google Scholar ] [ CrossRef ]
- سازمان بین المللی هیدروگرافی Universal Hydrographic Data Model Special, Publication S-100, Edition 4.0.0. در دسترس آنلاین: https://iho.int/en/s-100-universal-hydrographic-data-model (در 31 دسامبر 2018 در دسترس است).
- کاسترسیوس، سی. Pilikou، M. شایستگی های نقشه برداری دریایی و تأثیر آنها بر تحقق پایگاه داده نمودارهای ناوبری الکترونیکی در سراسر جهان، عملکرد ECDIS و تحقق الزامات حمل نمودار IMO. سیاست مارس 2017 ، 75 ، 29-37. [ Google Scholar ] [ CrossRef ]
- سازمان بین المللی هیدروگرافی مشخصات محصول نمودار ناوبری الکترونیک IHO، انتشار S-101، نسخه 1.0.0. در دسترس آنلاین: https://iho.int/en/standards-and-specifications (در تاریخ 21 دسامبر 2018 قابل دسترسی است).
- جوهانسون، سی. رندر آب در زمان واقعی. پایان نامه کارشناسی ارشد، دانشگاه لوند، لوند، سوئد، 2004. [ Google Scholar ]
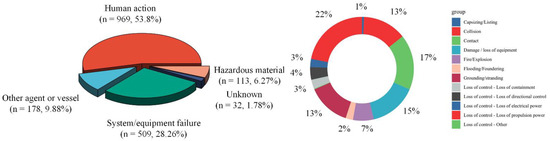
شکل 1. توزیع رویدادهای تصادف برای دوره 2014-2019.
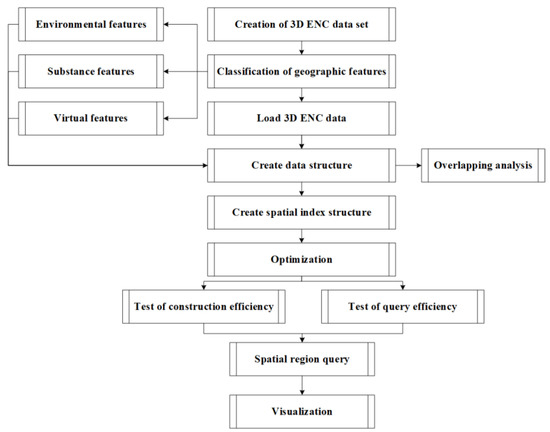
شکل 2. ساختار سازمانی این مقاله.
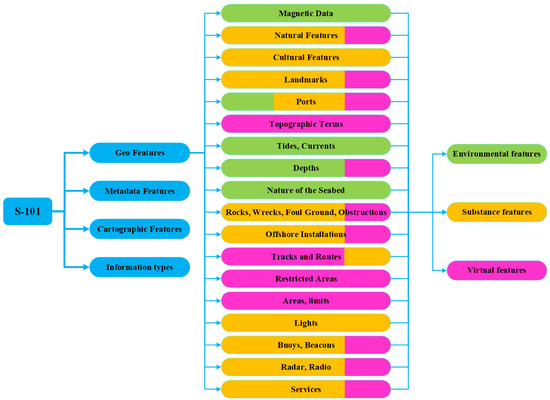
شکل 3. مجموعه داده های 3 بعدی ENC.
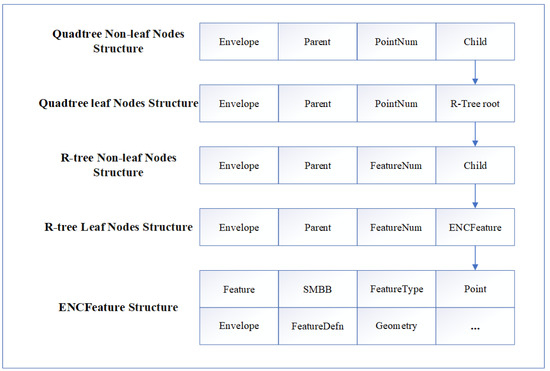
شکل 4. ساختارهای داده ویژگی های ENC سه بعدی و ساختار نمایه سازی فضایی.
شکل 5. ساختارهای شاخص فضایی ویژگی های 3D ENC.
شکل 6. تقاطع ویژگی ها. ( الف ) پاکت از همان نوع ویژگی ها. ( ب ) تقاطع ویژگی ها از همان نوع. ( ج ) پاکت از ویژگی های نوع مختلف. ( د ) تلاقی ویژگی های انواع مختلف.

شکل 7. تقاطع ویژگی ها. ( الف ) ویژگی های SMBB. ( ب ) تقاطع ویژگی های SMBB.

شکل 8. تقاطع ویژگی ها. ( الف ) ویژگیهای یکسان با هم تداخل ندارند. ( ب ) انواع مختلف ویژگی ها همپوشانی دارند.
شکل 9. زمان ساخت و زمان جستجوی چهار درخت. ( الف ) زمان ساخت Quadtree. ( ب ) زمان پرس و جو Quadtree.
شکل 10. زمان ساخت و زمان جستجوی R-tree. ( الف ) زمان ساخت R-tree. ( ب ) زمان پرس و جو درخت R.
شکل 11. روابط بین ساخت و زمان پرس و جو درخت 3DENCQR و آستانه های مختلف. ( a , c , e , g ) روابط بین ساخت 3DENCQR-tree و آستانه های QK مختلف در RK = 16، RK = 32، RK = 64 و RK = 128. ( b , d , f , h ) روابط بین پرس و جو 3DENCQR-tree و آستانه های QK مختلف در RK = 16، RK = 32، RK = 64 و RK = 128.
شکل 12. زمان ساخت و زمان پرس و جو از سه ساختار شاخص فضایی. ( الف ) زمان ساخت سه ساختار شاخص فضایی. ( ب ) زمان پرس و جو از سه ساختار شاخص فضایی.
شکل 13. تجسم 3D ENC.


بدون دیدگاه