

کلید واژه ها:
فرآیند نقطه خوشه بندی علامت ; استخراج شی ; نظریه بیزی ؛ پرش برگشتی زنجیره مارکوف مونت کارلو (RJMCMC)
1. مقدمه
-
فرآیند نقطه خوشه بندی علامت برای تناسب با ویژگی های هندسی اشیاء زمینی پیشنهاد شده است.
-
این مقاله ایجاد مدل داده تصاویر سنجش از دور رنگی را با استفاده از توزیع گاوسی چند ارزشی پیشنهاد میکند.
-
این مقاله شش عملیات متحرک RJMCMC را طراحی می کند که برای تناسب با ویژگی های هندسی اجسام زمینی استفاده می شود.
2. الگوریتم پیشنهادی
2.1. مدل هندسی جسم زمینی
2.2. مدل داده تصویر
2.3. مدل استخراج شی زمینی
قوانین آماری مکان، توزیع و شکل هندسی اجسام زمینی را می توان به عنوان توزیع احتمال پیشینی مشترک پیکربندی ( u ، v ، k ، m ) فرآیند نقطه خوشه بندی علامت توسط گرافیک نامنظم تعریف کرد، یعنی p ( u ، v ، k ، m )، که در آن k = { kj ، j = 1، …، m } . با فرض اینکه احتمالات قبلی که مکان و هندسه جسم زمین را توصیف می کنند مستقل از یکدیگر هستند، p ( u, v , k , m ) را می توان به صورت زیر نوشت
علاوه بر این با فرض اینکه هر نقطه تصادفی در فرآیند توصیف اجسام از یکدیگر مستقل است و شکل هندسی اجسام نیز مستقل از یکدیگر است، معادله (3) را می توان به صورت زیر بازنویسی کرد:
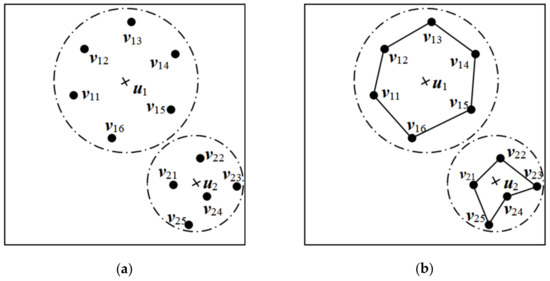
این مقاله از نظریه فرآیند نقطه خوشهای برای مدلسازی مکان و شکل هندسی اجسام زمینی استفاده میکند. فرآیند نقطه خوشه بندی یک فرآیند نقطه ای است که بر اساس فرآیند نقطه پواسون شکل می گیرد. به طور کلی در نظر گرفته می شود که فرآیند والد آن فرآیند پواسون است. بنابراین دو شرط باید رعایت شود. یکی این است که برای تعداد اشیاء زمینی توزیع شده به طور مساوی در حوزه داده S ، به طور کلی در نظر گرفته می شود که متغیر به طور تصادفی و مستقل با نرخ میانگین ثابت ظاهر می شود و در نظر گرفته می شود که از توزیع پواسون تبعیت می کند. سپس توزیع احتمال p ( m ) تعداد اجسام زمین m را می توان به صورت زیر بیان کرد:
که در آن Poi نشان دهنده تابع توزیع پواسون و λ m پارامتر توزیع پواسون است.
مورد دیگر این است که مکان اشیاء زمین در حوزه داده S به طور کلی مطابق با توزیع یکنواخت در نظر گرفته می شود. یعنی توزیع احتمال p ( u j ) محل شی زمینی j از توزیع یکنواخت پیروی می کند که می تواند به صورت زیر بیان شود:
که در آن Uni توزیع یکنواخت و | S | نشان دهنده ناحیه دامنه داده S است. در عین حال، با فرض اینکه هر شی مستقل از یکدیگر است، توزیع احتمال p ( u ) مکان همه اشیاء در دامنه داده S به صورت زیر بیان می شود:
از آنجایی که امکان همپوشانی اجسام زمینی از نظر جغرافیایی وجود ندارد، لازم است مکان و توزیع اشیاء زمینی در فرآیند نقطه u محدود شود تا از اشغال اشیاء زمینی مختلف در یک منطقه جلوگیری شود. بنابراین، تابع احتمال تعامل موقعیت جسم زمینی به صورت زیر تعریف می شود:
که در آن p ( u j , u j’ ) تابع توزیع احتمال رابطه متقابل بین اشیاء زمینی j و j’ است. برای حذف کامل همپوشانی اشیاء زمینی j و j’ ، p ( u j , u j’ ) را می توان به صورت زیر تعریف کرد:
که در آن S j و S j’ مساحت اشغال شده توسط اجسام زمین j و j’ را نشان می دهد و Φ نشان دهنده یک مجموعه خالی است.
پس از مدلسازی مکان و تعداد اجسام زمین (فرایند مادر)، هندسه اجسام زمین (فرایند فرعی) را مدل می کنیم. سپس با فرض اینکه پیکربندی های هندسی اجسام مستقل از یکدیگر هستند، پس
برای نقطه خوشه مجموعه v j = ( v jg , g = 1, …, k j ) برای تناسب با شکل هندسی شی زمین j -ام با فرض اینکه توزیع هر نقطه خوشه مستقل از یکدیگر است استفاده می شود. ، سپس،
برای بیان خوشهبندی هر نقطه خوشه در فرآیند فرعی خوشهبندی به موقعیت هر نقطه تصادفی در فرآیند والد خوشهبندی، میتوان فرض کرد که || u j – v jg || 2 توزیع گاوسی را برآورده می کند،
تعداد نقاط خوشه kj مربوط به شی j توزیع پواسون را با پارامتر λ k برآورده می کند .
با فرض اینکه توزیع هندسی هر شی مستقل از یکدیگر است، تعداد فرآیندهای فرعی خوشه بندی هر شی مستقل از یکدیگر است. برای تعداد گره ها در کل تصویر سنجش از دور k = { k j , j = 1, …, m }، تابع توزیع احتمال باید به صورت
2.4. شبیه سازی و بهینه سازی مدل استخراج شی
2.4.1. شبیه سازی
با هدف مدل استخراج شی زمینی (احتمال پسینی) بر اساس قضیه بیزی، الگوریتم RJMCMC مربوطه طراحی شده است. علاوه بر پارامترهای موجود در پیکربندی هندسی w شی زمینی، مدل باید پارامترهای توزیع θ مدل توزیع را که توسط دادههای مشاهده تصویر سنجش از دور رعایت میشود، نیز شامل شود. بنابراین، تمام پارامترهای مدل را به عنوان Θ = ( u ، v ، k ، θ ، m ) تنظیم کنید، و مدل احتمال پسینی برای استخراج اشیا را می توان به صورت زیر بازنویسی کرد.
- 1.
-
به روز رسانی پارامترهای توزیع θ
پارامترهای توزیع θ ( t ) = ( μ b ( t ) , Σ b ( t ) , μ o ( t ) , Σ o ( t ) ) به ترتیب به روز می شوند. با در نظر گرفتن μb ( t ) به عنوان مثال، یک پارامتر کاندید جدید μb * پیشنهاد شده است، و در نظر گرفته می شود که از توزیع گاوسی با میانگین μb ( t ) پیروی می کند .و واریانس ε b به ترتیب. نرخ پذیرش به روز رسانی پارامتر توزیع μb ( t ) به صورت زیر تعریف می شود :
- 2.
-
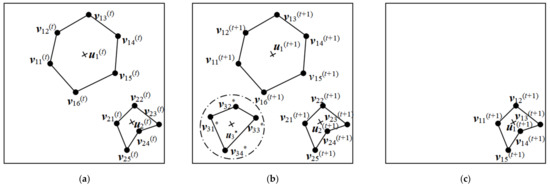
چند ضلعی اضافه کنید
برای افزودن یک عملیات چند ضلعی، اجازه دهید پیکربندی هندسی جسم زمین در حالت تکرار t- امین باشد w ( t ) = { w j ( t ) , j = 1, …, m ( t ) } = { u ( t ) , v ( t ) } = {( u j ( t ) , v j ( t ) ), j = 1, …, m ( t )}. در تکرار t +1، یک چند ضلعی اضافه کنید، شاخص چند ضلعی تازه اضافه شده m ( t ) + 1 است و پیکربندی wمترتی+1*=(تومترتی+1*،vمترتی+1*). جایی که، تومترتی+1*~ Uni ( S b )، vمترتی+1*={vمترتی+1g*،g=1،…،کمترتی+1*}، vمترتی+1g*~Unمن(اسمترتی+1)، کمترتی+1*~پoمنλک. سپس، راضی کنید: برای چند ضلعی دلخواه v j ، j ∈ {1، …، m ( t ) }، vمترتی+1g*∩vj=Φ. پس از افزودن عملیات چند ضلعی، پیکربندی نامزد هندسه شی زمین است w*={wتی،wمترتی+1*}. پارامتر توزیع مربوط به چند ضلعی جدید اضافه شده است θمترتی+1*، که از توزیع قبلی از پیش تعریف شده آن استخراج می شود. هنگامی که یک چند ضلعی اضافه می شود، پارامترهای توزیع θ ( t ) مدل استخراج شی زمین تغییر نخواهد کرد، بنابراین توزیع احتمال آن تغییر نخواهد کرد. با این حال، پارامترهای ( u ( t ) ، v ( t ) ، k ( t ) ، m ( t ) ) در پیکربندی هندسی w ( t )شی زمین با افزایش چند ضلعی ها تغییر می کند، بنابراین توزیع احتمال مربوطه نیز تغییر خواهد کرد. در همان زمان، مدل داده های تصویر سنجش از دور p ( z | θ ( t ) , w ( t ) ) نیز بر این اساس تغییر خواهد کرد. بنابراین، میزان پذیرش عملیات افزودن چند ضلعی به صورت زیر تعریف می شود:
جایی که، ز=wمترتی+1*،θمترتی+1*بردار حفظ تعادل ابعاد است و p ( ζ ) تابع احتمال بردار پیشنهادی است. zمترتی+1=zمن،ایکسمن∈vمترتی+1*. p D و p A به ترتیب احتمال انتخاب عملیات افزودن یا حذف چند ضلعی هستند. اگر یکی از این عملیات در طراحی الگوریتم شبیهسازی مدل ترجیح داده نشود، میتوانیم p D = p A را فرض کنیم ، یعنی میتوانیم چندضلعیها را با احتمال مساوی اضافه یا حذف کنیم.
- 3.
-
حذف چند ضلعی ها
برای حذف یک عملیات چند ضلعی، اجازه دهید پیکربندی هندسی جسم زمین در حالت تکرار t- امین باشد w ( t ) = { w j ( t ) , j = 1, …, m ( t ) }. یک چند ضلعی دلخواه v j ( t ) به طور تصادفی با احتمال مساوی 1/ m ( t ) از پیکربندی هندسی هدف فعلی w ( t ) انتخاب می شود. پیکربندی هندسی چند ضلعی انتخاب شده w است j ( t ) = ( u j ( t ) , v j ( t ) ) . این چند ضلعی را حذف می کنیم و چند ضلعی های باقی مانده را دوباره ترتیب می دهیم. سپس پیکربندی هندسی جسم به این صورت است w * = { w j * , j = 1, …, m ( t ) − 1} است. در همان زمان، پارامترهای توزیع مربوط به این چند ضلعی θj ( t ) حذف می شوند . هنگامی که این عملیات انجام می شود، توزیع احتمال پارامترهای توزیع θ( t ) بدون تغییر باقی می ماند. پارامترهای ( u ( t ) ، v ( t ) ، k ( t ) ، m ( t ) ) در پیکربندی هندسی w ( t ) شی زمین و مدل داده تصویر سنجش از دور p ( z | θ ( t ) ، w ( t )) تغییر خواهد کرد. در عین حال، این عملیات ابعاد مجموعه پارامتر را نیز تغییر می دهد. برای سادگی، بردار اختیاری برای حفظ تعادل ابعادی ζ = ( wj ( t ) ، θj ( t ) ) است . بنابراین، نرخ پذیرش عملیات چند ضلعی حذف به صورت زیر تعریف می شود:
جایی که، z j = { z i ، x i ∈ v j }.
- 4.
-
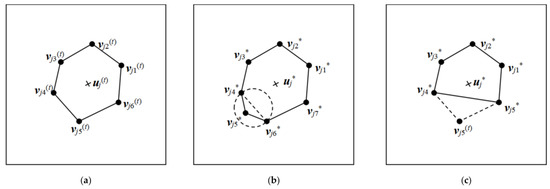
گره های چند ضلعی را اضافه کنید
برای هر چند ضلعی معین، گره همسایگی هر گره گرهی است که مستقیماً به گره متصل است و دو گره مستقیماً متصل یک جفت گره همسایگی را تشکیل می دهند. اجازه دهید پیکربندی هندسی جسم زمین در حالت تکرار t ، w ( t ) = { w j ( t ) , j = 1, …, m ( t ) } باشد. یک چند ضلعی دلخواه v j ( t ) به طور تصادفی با احتمال مساوی 1/ m ( t ) از پیکربندی هندسی هدف فعلی انتخاب می شود.w ( t ). یک جفت گره همسایگی ( v jg ( t ) , v jg +1 ( t ) ) با احتمال مساوی 1/ k j ( t ) از مجموعه گره v j ( t ) چند ضلعی انتخاب شده انتخاب کنید. یک نقطه به طور تصادفی به عنوان یک گره نامزد اضافی در ناحیه تقاطع بین دایره با ( vjg ( t ) + v jg +1 ( t ) )/2 به عنوان مرکز انتخاب می شود | vjg ( t )به صورت مجدد مرتب می شوند+ v jg +1 ( t ) |/2 به عنوان شعاع و ناحیه قابل مشاهده یال v jg ( t ) v jg +1 ( t ) . سپس، گره کاندید بین جفتهای گره ( vjg ( t ) , vjg +1 ( t ) ) برای ساخت چند ضلعی کاندید v j * وارد میشود . در نهایت، گره های چند ضلعی کاندید v j * v j * = { v jg* ، g = 1، …، kj ( t ) + 1}. بدون از دست دادن عمومیت، گره جدید را به صورت v jg * ضبط کنید . هنگامی که این عملیات انجام می شود، توزیع احتمال پارامترهای توزیع θ ( t ) و پارامترهای ( u ( t ) ، m ( t ) ) در پیکربندی هندسی w ( t ) جسم زمینی بدون تغییر باقی می مانند. توزیع احتمال (v ( t ) ، k ( t ) ) و مدل دادههای تصویر سنجش از دور p ( z | θ ( t ) ، w ( t ) ) تغییر خواهند کرد. در عین حال، این عملیات ابعاد مجموعه پارامتر را نیز تغییر می دهد. برای سادگی، بردار اختیاری برای حفظ تعادل ابعاد ζ = { v jg * } است. میزان پذیرش عملیات افزودن گره چند ضلعی به صورت زیر تعریف می شود:
جایی که z j * = S j * \ S j ( t ) ، z bj * = S j ( t ) \ S j * ، S j * و S j ( t ) نشان دهنده مساحت های اشغال شده توسط چند ضلعی کاندید v j * و چند ضلعی فعلی v j ( t ) به ترتیب. اگر z j *یا z bj * یک مجموعه خالی است، تابع چگالی احتمال مشروط مربوطه آن را برابر با 1 قرار می دهیم. p DV و p AV به ترتیب احتمال انتخاب عملیات گره چند ضلعی اضافه یا حذف هستند.
- 5.
-
حذف گره های چند ضلعی
هنگامی که این عملیات انجام می شود، توزیع احتمال پارامترهای توزیع θ ( t ) و پارامترهای ( u ( t ) ، m ( t ) ) در پیکربندی هندسی w ( t ) جسم زمینی بدون تغییر باقی می مانند. توزیع احتمال پارامترهای ( v ( t ) ، k ( t ) ) و مدل دادههای تصویر سنجش از دور p ( z | θ ( t ) ،w( t ) ) تغییر خواهد کرد. در عین حال، این عملیات ابعاد مجموعه پارامتر را نیز تغییر می دهد. برای سادگی، بردار اختیاری برای حفظ تعادل ابعاد ζ = { v jg * } است. نرخ پذیرش عملیات حذف گره چند ضلعی به صورت زیر تعریف می شود:
- 6.
-
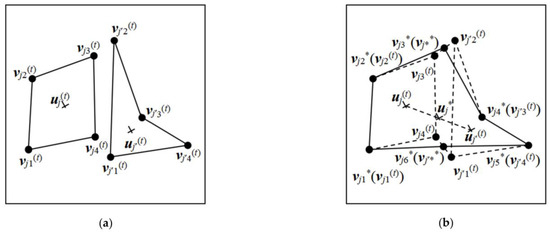
ادغام چند ضلعی ها
اجازه دهید پیکربندی هندسی جسم زمین در حالت تکرار t ، w ( t ) = { w j ( t ) , j = 1, …, m ( t ) } باشد. دو چند ضلعی v j ( t ) و v j ‘ ( t ) را به طور تصادفی از پیکربندی هندسی شی فعلی w ( t ) انتخاب کنید.و سپس فاصله جفت گره آنها را به ترتیب محاسبه کنید. اگر فاصله بین کوتاهترین و فرعی ترین جفت گره کمتر از یک آستانه معین باشد، دو چند ضلعی را با هم ادغام می کنیم. عملیات چند ضلعی ادغام با ادغام جفت گره ها محقق می شود. نقطه وسط کوتاه ترین جفت گره و جفت گره فرعی را به عنوان گره های تازه اضافه شده در نظر بگیرید و آنها را با گره های دیگر ترکیب کنید تا چند ضلعی کاندید v j * بسازید . هنگامی که این عملیات انجام می شود، پارامترهای توزیع θ ( t ) بدون تغییر باقی می مانند و توزیع احتمال آن بدون تغییر باقی می ماند. پارامترهای ( u ( t ) ، v ( t ) ،k ( t ) , m ( t ) ) در پیکربندی هندسی w ( t ) جسم زمین با ادغام چند ضلعی ها تغییر می کند و توزیع احتمال مربوطه آنها نیز تغییر می کند. در همان زمان، مدل دادههای تصویر سنجش از دور p ( z | θ ( t ) , w ( t ) ) نیز تغییر میکند، بنابراین نرخ پذیرش عملیات ادغام چند ضلعیها برابر است با
جایی که، z j * = S j * \( S j ( t ) ∪ S j’ ( t ) ), z bj * = ( S j ( t ) ∪ S j’ ( t ) )\ S j * .
2.4.2. بهینه سازی
معیار MAP ساده ترین طرح بهینه سازی است. هنگامی که احتمال خلفی در مدل استخراج بیزی بزرگترین باشد، راه حل مربوطه نتیجه استخراج شی بهینه است. راه حل بهینه تخمین پارامتر تحت شرایط MAP،
جایی که Θ^=w^،θ^=تو^،v^،ک^،متر^،θ^حداکثر تخمین احتمال پسینی مجموعه پارامتر است ( w , θ ) = ( u , v , k , m , θ ).
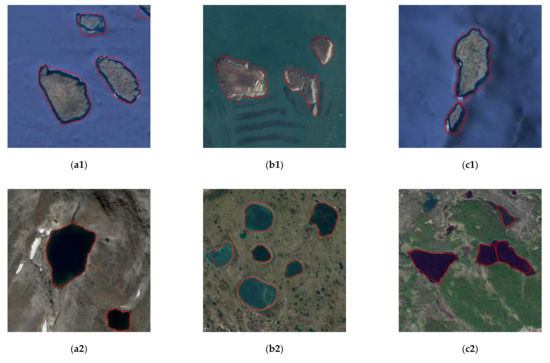
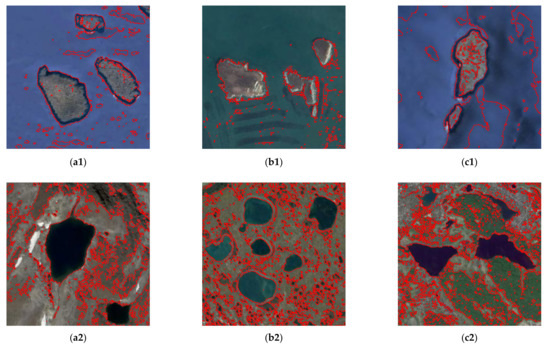
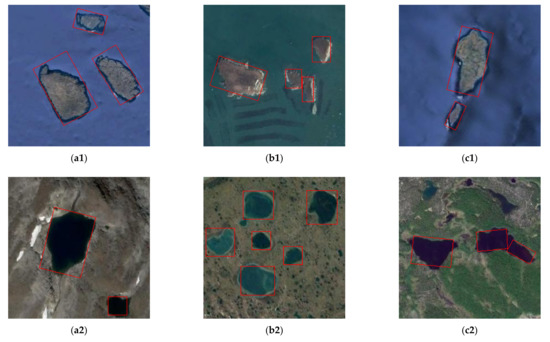
3. نتایج آزمایش
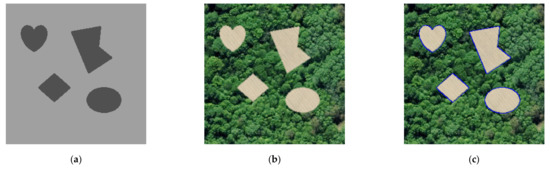
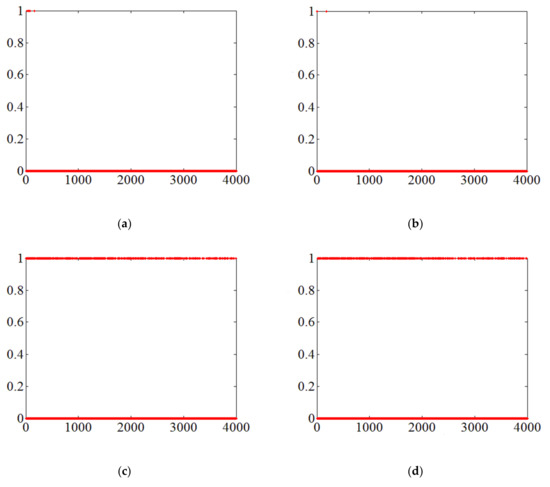
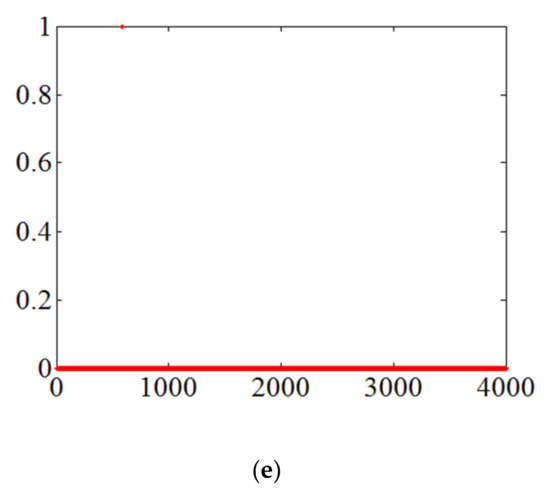
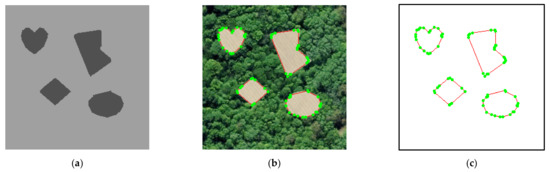
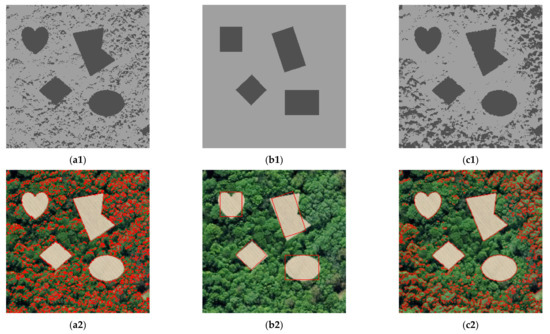
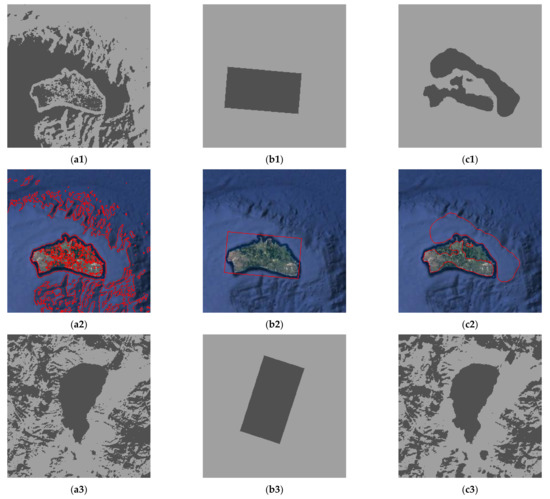
3.1. آزمایش تصویر مصنوعی
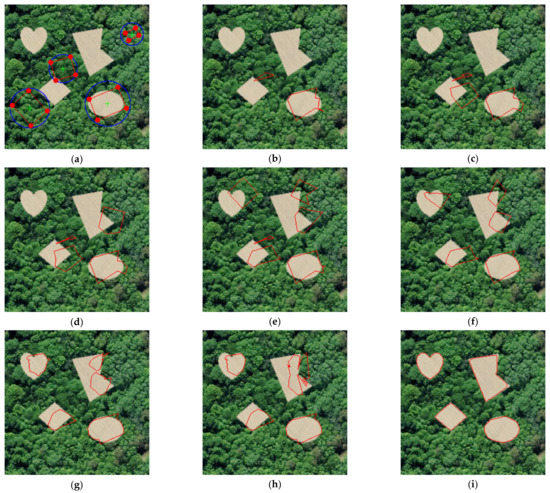
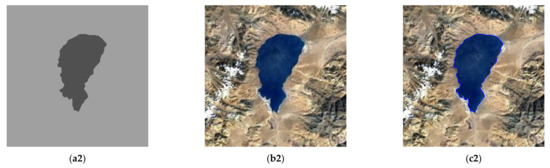
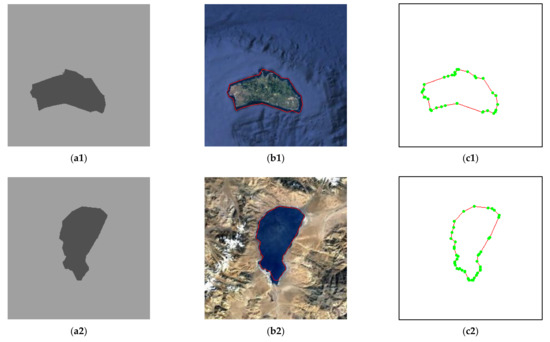
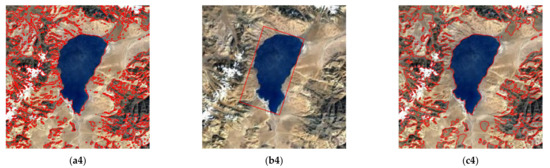
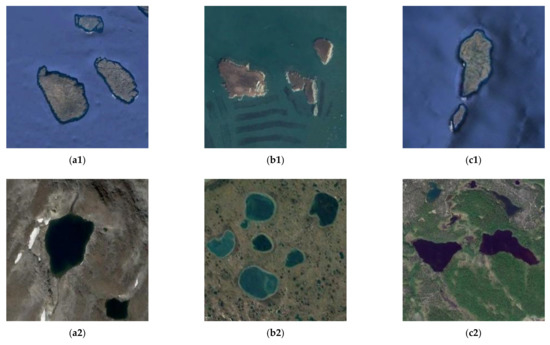
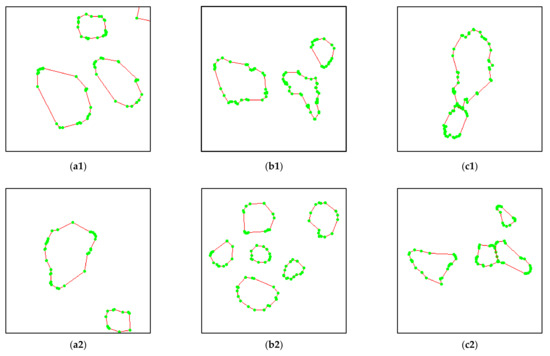
3.2. آزمایش تصویر واقعی
4. نتیجه گیری
منابع
- Foschini، GJ; Gans, MJ در مورد محدودیتهای ارتباطات بیسیم در محیط محو شدن هنگام استفاده از آنتنهای متعدد. سیم. پارس اشتراک. 1998 ، 6 ، 311-335. [ Google Scholar ] [ CrossRef ]
- ماسودا، ر. Inoue، تشخیص خوشه رویداد نقطه R. از طریق کمند ذوب شده تعمیم یافته بیزی. ISPRS Int. J. Geo-Inf. 2022 ، 11 ، 187. [ Google Scholar ] [ CrossRef ]
- هارون، م. شهزاد، م. تشخیص شی چند اندازه فراز، MM با استفاده از تصاویر نوری فضابرد. IEEE J. Sel. بالا. Appl. زمین Obs. Remote Sens. 2020 , 13 , 3032–3046. [ Google Scholar ] [ CrossRef ]
- اروس، جی. Loménie, N. چگونه می توان مدل سازی ساختاری را برای وظایف تشخیص اشیاء نقشه برداری در تصاویر ماهواره ای با وضوح بالا در نظر گرفت. تشخیص الگو Lett. 2010 ، 31 ، 1109-1119. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- خو، ی. Xiong، W. Liu, J. الگوریتم جدید تشخیص هدف کشتی بر اساس SVM در تصاویر SAR با وضوح بالا. در مجموعه مقالات کنفرانس بین المللی پیشرفت در پردازش تصویر، بانکوک، تایلند، 25 تا 27 اوت 2017. [ Google Scholar ]
- یوکویا، ن. Iwasaki، A. تشخیص شیء بر اساس نمایش پراکنده و رای Hough برای تصاویر سنجش از دور نوری. IEEE J. Sel. بالا. Appl. زمین Obs. Remote Sens. 2015 ، 8 ، 2053–2062. [ Google Scholar ] [ CrossRef ]
- چن، اچ. گائو، تی. کیان، جی. چن، دبلیو. Zhang، Y. تبدیل Hough تعمیم یافته تنسور شده برای تشخیص شی در تصاویر سنجش از دور. IEEE J. Sel. بالا. Appl. زمین Obs. Remote Sens. 2020 , 13 , 3503–3520. [ Google Scholar ] [ CrossRef ]
- سان، اچ. سان، ایکس. وانگ، اچ. لی، ی. Li، X. تشخیص خودکار هدف در تصاویر سنجش از دور با وضوح بالا با استفاده از مدل کیسه کلمات کدگذاری پراکنده فضایی. IEEE Geosci. سنسور از راه دور Lett. 2011 ، 9 ، 109-113. [ Google Scholar ] [ CrossRef ]
- بادلی، ای جی; مدلهای هندسه تصادفی Lieshout، MNMV در دید سطح بالا. J. Appl. آمار 1993 ، 20 ، 231-256. [ Google Scholar ] [ CrossRef ]
- پیواتولو، ا. سبز، تشخیص مرز PJ از طریق چند ضلعی های پویا. JR Stat. Soc.: Ser. B (Stat. Methodol.) 1998 ، 60 ، 609-626. [ Google Scholar ] [ CrossRef ]
- ژائو، کیو. ژانگ، اچ. Li، Y. تشخیص نقاط تاریک از تصاویر با شدت SAR توسط یک فرآیند نقطه ای با علائم هندسی نامنظم. بین المللی J. Remote Sens. 2019 , 40 , 774–793. [ Google Scholar ] [ CrossRef ]
- دسکامبز، ایکس. Zerubia, J. فرآیند نقطه مشخص شده در تجزیه و تحلیل تصویر. فرآیند سیگنال IEEE Mag. 2002 ، 19 ، 77-84. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- اورتنر، ام. دسکامبز، ایکس. Zerubia, J. استخراج طرح کلی ساختمان از مدل های ارتفاعی دیجیتال با استفاده از فرآیندهای نقطه مشخص شده. بین المللی جی. کامپیوتر. Vis. 2007 ، 72 ، 107-132. [ Google Scholar ] [ CrossRef ]
- پرین، جی. دسکامبز، ایکس. Zerubia, J. یک مدل فرآیند نقطه مشخص برای استخراج تاج درخت در مزارع. در مجموعه مقالات کنفرانس بین المللی IEEE در مورد پردازش تصویر، جنوا، ایتالیا، 14 سپتامبر 2005. [ Google Scholar ]
- لاکوست، سی. دسکامبز، ایکس. فرآیندهای زروبیا، J. نقطه برای استخراج شبکه خط بدون نظارت در سنجش از دور. IEEE Trans. الگوی مقعدی ماخ هوشمند 2005 ، 27 ، 1568-1579. [ Google Scholar ] [ CrossRef ] [ PubMed ]
- اورتنر، ام. دسکامبز، ایکس. Zerubia, J. یک فرآیند نقطه مشخص از مستطیل ها و بخش ها برای تجزیه و تحلیل خودکار مدل های ارتفاعی دیجیتال. IEEE Trans. الگوی مقعدی ماخ هوشمند 2007 ، 30 ، 105-119. [ Google Scholar ] [ CrossRef ] [ PubMed ][ نسخه سبز ]
- لافارژ، اف. گیمل فارب، جی. Descombes، X. استخراج ویژگی هندسی توسط یک فرآیند نقطه چند علامت. IEEE Trans. الگوی مقعدی ماخ هوشمند 2009 ، 32 ، 1597-1609. [ Google Scholar ] [ CrossRef ] [ PubMed ][ نسخه سبز ]
- شرر، بی. دکتر، م. فوربس، اف. گاربای، سی. عامل تقسیم بندی مبتنی بر مدل مارکوف: کاربرد در اسکن مغز با رزونانس مغناطیسی. آرتیف. هوشمند پزشکی 2009 ، 46 ، 81-95. [ Google Scholar ] [ CrossRef ] [ PubMed ][ نسخه سبز ]
- لی، ی. Li, J. تشخیص نشت نفت از تصاویر شدت SAR با استفاده از فرآیند نقطه مشخص شده. سنسور از راه دور محیط. 2010 ، 114 ، 1590-1601. [ Google Scholar ] [ CrossRef ]
- دینگ، ک. شیائو، ال. Weng, G. خطوط فعال که توسط انرژی از پیش تنظیم شده محلی برای تقسیمبندی سریع تصویر هدایت میشوند. تشخیص الگو Lett. 2018 ، 104 ، 29-36. [ Google Scholar ] [ CrossRef ]
- چنگ، جی. هان، جی. Lu, X. طبقه بندی صحنه تصویر سنجش از دور: معیار و وضعیت هنر. Proc. IEEE 2017 ، 105 ، 1865-1883. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]





9 دیدگاه ها