

کلید واژه ها:
AR-GIS ; نقشه برداری ; ژئوتصویرسازی ; رباعی ; جعبه سند AR
1. مقدمه
-
تحقیقات در مورد نمایش وضعیت (موقعیت و جهت) شی فضایی در GIS هنوز محدود است. در یک سیستم GIS دو بعدی یا سه بعدی، سیستم نمایش تنها به عملیات کاربر و پارامترهای نمایش نیاز دارد. با این حال، برای سیستم نمایش در AR-GIS، دقت تخمین پوز و ردیابی به چالشهای کلیدی تبدیل میشود [ 42 ، 43 ]. نمایش موقعیت زوایای اویلر اعمال شده توسط سیستم های GIS سنتی محدود است. موقعیت و جهت گیری مناسب برای بازیابی و نمایش اطلاعات مکانی صحیح بسیار مهم است. زاویه اویلر، که به طور گسترده در GIS به کار می رود، یک نمایش رایج از رویکرد چرخش سه بعدی و پردازش حالت و اطلاعات حرکت زاویه ای است [ 44 ]]. با این وجود، برای یک نیاز خاص تر در روابط فضایی پیچیده و سناریوهای حرکت در مقیاس بزرگ با فرکانس بالا، زوایای اویلر هنگامی که زاویه گام 90 درجه است منجر به تکینگی می شود. این منجر به وجود بی نهایت راه حل برای دنباله اویلر می شود. علاوه بر این، رویکرد توصیف زاویههای اویلر در هنگام رسیدگی به ژست مشکلات محاسباتی دارد. علیرغم مطالعات متعددی که روشهای دقیقتر چرخش و تصحیح وضعیت را توسعه میدهند، روشهای فعلی به محاسبه پوزی یک شی فضایی منفرد یا دادههای مکانی تک منبع محدود میشوند. ماژول کلی برای اشیاء فضایی چند منبعی در GIS هنوز کمیاب است.
-
محاسبه رابطه هندسی بین اشیاء فضایی دو بعدی و سه بعدی هنوز ناکارآمد است. در صحنه واقعی نقشه AR، پردازش روابط فضایی پیچیده تر از پردازش در نقشه سنتی دو بعدی و سه بعدی GIS است. دلیل اصلی این است که روابط فضایی در AR شامل معنایی پیچیده فضایی و مسائل رندر سه بعدی خاص است. متفاوت از GIS سنتی 2D/3D، AR-GIS نیاز به تعیین رابطه صحیح بین فضای واقعی و دیجیتال [ 45 ]، قرار دادن عناصر دیجیتال [ 25 ، 46 ] از جمله انسداد [ 47 ، 48 ] و اجتناب [ 10 ] دارد.]. این وظایف در AR-GIS بسیار مهم هستند زیرا مسئولیت محدودیتهای معنایی فضایی بین موجودیتهای دیجیتال و محیطهای واقعی را بر عهده دارند. علاوه بر این، عناصر تولید شده توسط رایانه در صحنههای AR پویا باید به دسترسی، وضوح، زیباییشناسی و تداوم مکانی-زمانی بپردازند، که میتواند چالشبرانگیز باشد [ 49 ]. اگرچه فناوری بینایی کامپیوتری میتواند برخی از مشکلات را حل کند، نتایج محاسبه رابطه مبتنی بر بصری برای فعال کردن تابع رابطه هندسی فضایی GIS بسیار درشت است. و کارایی پردازش رابطه فضایی پیچیده شی فضایی سه بعدی در سیستم GIS کافی نیست [ 50 ].
-
عملکرد واقعیت افزوده موبایل (MAR) [ 7 ، 51 ] نیز برای برنامه های کاربردی AR-GIS مهم است. دستگاههای AR سیار به طور گسترده در برنامههای AR-GIS مستقر شدهاند، زیرا مجهز به حسگرهای متعدد [ 4 ، 52 ] هستند، اما ظرفیت محاسباتی سختافزار موبایل بسیار محدود است [ 53 ]. علاوه بر این، بسیاری از برنامه ها به نمایش بصری پویا در زمان واقعی و قابلیت های محاسباتی بالا نیاز دارند. تجسم در AR نیاز به همگام سازی با پردازش بصری انسان دارد [ 54 ]. تجسم ناکارآمد باعث تاخیر در AR می شود.
-
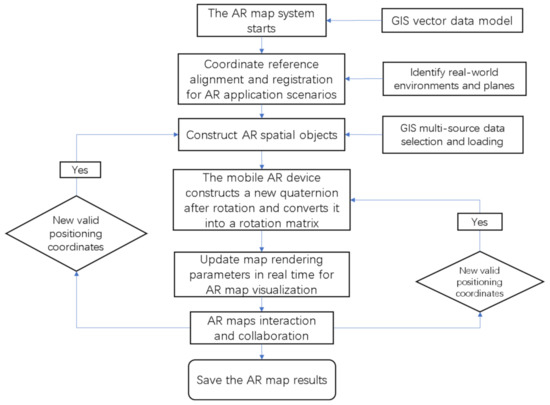
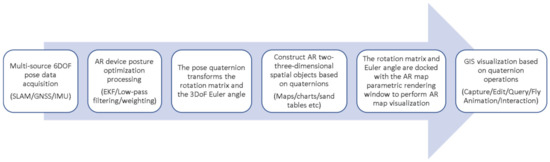
کل خط لوله برای به روز رسانی در زمان واقعی وضعیت اشیاء فضایی چند منبعی و کواترنیون ها و روش مبتنی بر SLAM برای ارائه اشیاء نقشه AR-GIS ارائه شده است. با استفاده از روش ما، دادههای پوسچر شش درجه آزادی از ناوبری اینرسی SLAM سیستم AR در سیستم GIS گنجانده میشود تا فرکانس همگامسازی نقشه AR با دنیای واقعی را بهبود بخشد، تراز و ثبت دنیای واقعی را درک کند، و کیفیت بالایی را ارائه دهد. ردیابی موقعیت دقیق
-
علاوه بر این، یک رابطه فضایی کارآمد و دقیق بین اشیاء فضایی دو بعدی و سه بعدی برای تجسم برداری AR در این مقاله پیشنهاد شده است. محاسبه روابط فضایی پیچیده اشیاء دو بعدی و سه بعدی به یک راه حل کواترنیون سریع تبدیل می شود. بنابراین، از پرس و جوهای فضایی پرهزینه محاسباتی و توابع مثلثاتی اجتناب می شود. برای این منظور، این مقاله یک رویکرد نگاشت برای تعیین رابطه توپولوژیکی شی 2D/3D و راه حل رابطه فضایی کواترنیون ارائه می دهد.
-
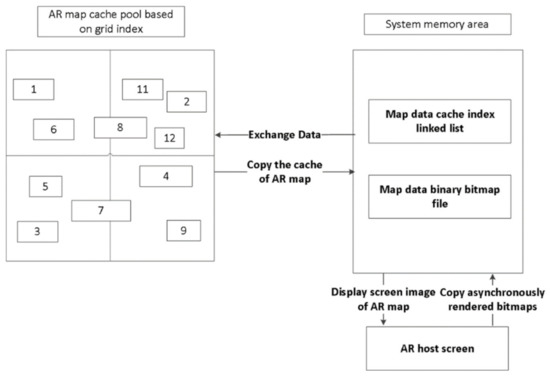
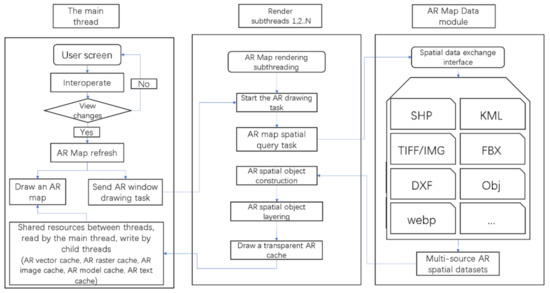
به منظور پاسخ سریع به الزامات به روز رسانی بلادرنگ در محیط واقعی AR، یک مکانیسم رندر ناهمزمان برای تجسم نقشه AR بلادرنگ نیز در این مقاله ارائه شده است. این مقاله بر اساس تحقیقات قبلی [ 25 ] برای ارائه یک زمانبندی چند رشتهای با کارایی بالا از نقشههای واقعیت افزوده است، و روشهای شتاب کارآمدی مانند نمایهسازی مش سلسله مراتبی، رندر دستهای مبتنی بر GPU، پیش ذخیرهسازی و زمانبندی درختی هشت ضلعی را پیادهسازی میکند.
2. کارهای مرتبط
2.1. ثبت نام و ردیابی برای AR-GIS
2.1.1. ثبت و ردیابی مبتنی بر حسگر
2.1.2. ثبت و ردیابی مبتنی بر نشانگر
2.1.3. ثبت و ردیابی مبتنی بر ویژگی
2.2. تخمین پست مبتنی بر کواترنیون
2.3. نقشه واقعیت افزوده
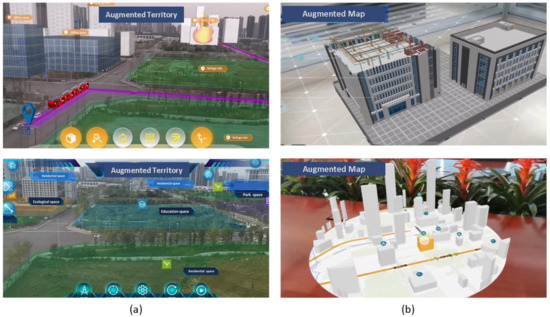
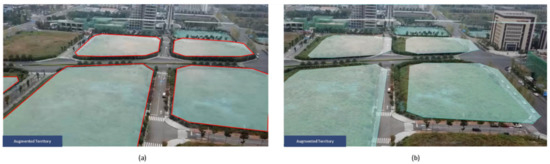
2.3.1. قلمرو افزوده شده
2.3.2. نقشه های افزوده شده
3. مواد، مفاهیم و روش ها
3.1. فرآیند تجسم برداری برای نقشه AR
3.2. محاسبه و تبدیل ژست مبتنی بر کواترنیون
3.2.1. تبدیل زاویه کواترنیون
کواترنیون هر موقعیت در سیستم مختصات نسبی را می توان با حرکت دادن دستگاه AR به دست آورد. یک کواترنیون واحد را می توان به عنوان یک نمایش پیچیده یا یک نمایش ماتریسی توصیف کرد.
جایی که qایکس،qyو qz برای نشان دادن محور به صورت برداری استفاده می شود و qwزاویه چرخش حول محور است.
برای به دست آوردن پارامترهای نمایش مورد نیاز نقشه برداری در عملیات تبدیل نمای، از معادله (2) برای تبدیل کواترنیون دستگاه AR متحرک به زوایای اویلر در موقعیت فعلی دوربین استفاده می شود.
جایی که زوایای اویلر ( ∅،θ،φ)به ترتیب، رول (چرخش حول محور Z )، گام (چرخش حول محور Y جدید )، انحراف (چرخش حول محور X جدید ) هستند.
3.2.2. تجسم اجسام فضایی مبتنی بر کواترنیون
کواترنیون q3وضعیت دستگاه AR موبایل را نشان می دهد. R نشان دهنده ماتریس چرخش دستگاه AR سیار همزمان است که در معادله (3) نشان داده شده است. ماتریس چرخش نقشه برداری شناسایی شده توسط کواترنیون در دستگاه AR متحرک با استفاده از رابطه (4) محاسبه می شود.
از آنجایی که نقشه برداری نیز یک شی فضایی AR است، کواترنیون ایجاد شده توسط حرکت دستگاه MAR می تواند به یک کواترنیون جدید موقعیت نقشه برداری تبدیل شود، و اطمینان حاصل شود که نقشه برداری پس از ثبت در دنیای واقعی ثابت می ماند. این روش، مطابق با معادله (5)، به نقشه برداری اجازه می دهد تا به طور مستقیم کواترنیون دستگاه AR را به هر موقعیتی که برای ترجمه انتخاب شده است، حرکت دهد و سپس نتیجه تبدیل کواترنیون از طریق فرآیند محاسبه به وظیفه تجسم نقشه برداری AR منتقل می شود. معادله (4).
3.3. محاسبه رابطه اجسام فضایی دوبعدی و سه بعدی مبتنی بر کواترنیون
مراحل اجرای دقیق به شرح زیر است: A صفحه افقی اولیه نقشه AR، B صفحه ای است که از سه نقطه غیر خطی تشکیل شده است، و بردار نرمال صفحه B با ضرب متقاطع سه نقطه محاسبه می شود. طبق فرمول چرخش رودریگز،
که در آن بردار نرمال واحد صفحه چرخش است ک(یعنی بردار واحد کاز محور چرخش)؛ توجه داشته باشید که هنگام چرخش جهت خلاف جهت عقربه های ساعت مثبت است. بردار نرمال صفحه A به صورت نشان داده می شود v0. بردار چرخشی را می توان به صورت بیان کرد
که در آن بردار نرمال صفحه B به صورت نشان داده می شود v1و θ زاویه چرخش است. آر0ماتریس چرخش در یک زاویه است θخلاف جهت عقربه های ساعت حول محور ککه می تواند به صورت محاسبه شود
جایی که E نشان دهنده 3 است ×3 ماتریس هویت پس از به دست آوردن ماتریس چرخش شی چند ضلعی مربوطه، اطلاعات کواترنیونی شی چند ضلعی را می توان از طریق رابطه (10) به دست آورد.
شکل زیر تبدیل بین ماتریس چرخش و کواترنیون است. همانطور که در رابطه (3) نشان داده شده است، ماتریس چرخش R است. تبدیل ماتریس چرخش R به کواترنیون را می توان بدون از دست دادن محاسبه کرد. معادله (10) محاسبه کواترنیون مربوط به فاز را نشان می دهد،
3.4. روش ناهمزمان با سرعت بالا برای تجسم برداری
4. نتایج و بحث
-
زوایای اویلر اغلب هنگام نمایش حرکت دارای مشکلات قفل گیمبال هستند که در نتیجه نمایش زاویه اویلر از همان حالت فضایی منحصر به فرد نیست. هنگامی که زاویه چرخش در دوربین نزدیک به 90 درجه است، یا زاویه گام نزدیک به 180 درجه، یا زاویه چرخش نزدیک به 180 درجه است، دو مجموعه نمایش زاویه اویلر با مقادیر بسیار متفاوت ممکن است چرخش یکسانی را نشان دهند. منجر به نمایش نقشه AR ناپایدار می شود.
-
روش های سنتی برای پشتیبانی از حرکت آزاد نامحدود 6DoF، یعنی چرخش، گام، غلتش و هر ترکیبی از عملیات در شش عملیات مانند جابجایی محور X ، جابجایی محور Y و جابجایی محور Z دشوار است. و توصیف دقیق چنین حالت حرکتی برای نقشه های AR غیرممکن است.
-
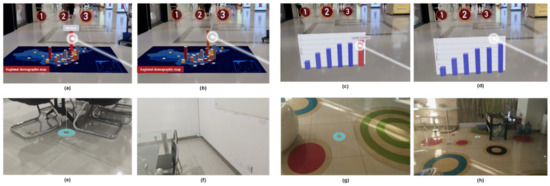
روش تجسم نقشه AR مبتنی بر کواترنیون ارائه شده در این مقاله می تواند با تجسم صاف تحت شرایط شدید هر محور حرکت دوربین بدون پدیده تکان دادن شدید ادامه یابد. این روش حالت حرکت دستگاه AR متحرک را به صورت حرکت سفت و سخت بدن بیان میکند و آن را از طریق کواترنیون بیان میکند، به طوری که محتوای تجسم نقشه برداری همیشه میتواند با صحنه واقعی، بدون دررفتگی یا لرزش شکستگی، تراز شود. علیرغم شرایط شدید زاویه گام در دوربین، رویکرد ما همچنان میتواند تمام محتوای عناصر را در نمای نقشه بهطور دقیق نمایش دهد.
-
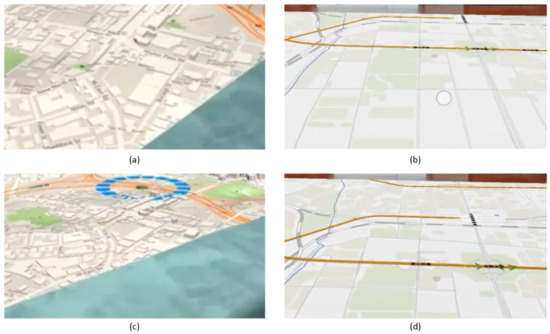
الگوریتم تجسم نقشه برداری AR پیشنهاد شده در این مقاله می تواند با سناریوی کاربردی نقشه برداری خام (غیر کاشی) که Mapbox در آن خوب نیست، سازگار شود. روش پیشنهادی از رومینگ عادی و عملیات ترجمه سریع پشتیبانی می کند و حتی می تواند عملیات کشش مداوم نقشه را در سراسر مقیاس انجام دهد و پدیده تاخیر نمایش آشکار را حذف کند.
-
در سناریوی کاربردی که Mapbox در نقشههای AR کاشیهای برداری خوب است، روش پیشنهادی در این مقاله به سختی میتواند تأخیر محتوای نقشه را زمانی که نقشه AR کاشی برداری به سرعت پانل میشود، ببیند، در حالی که Mapbox تأخیر رندر محتوا را در زمان واقعی ایجاد میکند. و نقشه خالی محتوای ترسیم شده ظاهر می شود.
-
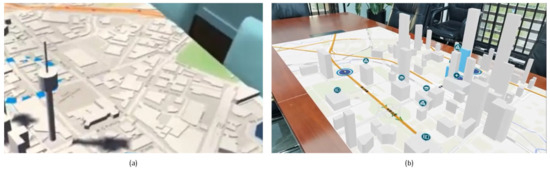
الگوریتم کواترنیون در روش ما میتواند به طور مؤثری پوز اینرسی SLAM را به ماتریس نمای مورد نیاز برای نمایش نقشه صاف تبدیل کند، در حالی که ویژگیهای نرخ فریم رندر فرکانس بالا و بهروزرسانی وضعیت با دقت بالا را حفظ میکند. این بیشتر برای تجسم و کارهای تعاملی برنامه های کاربردی مختلف نقشه AR، به ویژه سناریوهای کاربردی نقشه AR در مقیاس بزرگ و پیوسته مانند ناوبری نقشه در حالت واقعی و کاوش صحنه شهری در حالت چشم پوشی مناسب است.
-
روش مبتنی بر تطبیق ویژگی مزیت استخراج سریع و عدم نیاز به اطلاعات تصویر قبلی را دارد، اما در استفاده از نقشههای واقعیت افزوده واقعی، حرکت مکرر دستگاه AR موبایل و تعامل انسان و رایانه باعث تغییر زیادی در اطلاعات واقعی محیطی میشود و عملیات مرور نقشه اطلاعات مکرر مکرر را تولید می کند که تأثیر محاسباتی اضافی بیشتری را برای تطبیق ویژگی ها به ارمغان می آورد. علاوه بر این، تکمیل عملیات اصلی مانند راه رفتن و رومینگ طولانی مدت و مداوم، ناوبری پیاده روی، پاننگ و بزرگنمایی نقشه واقعی واقعیت افزوده دشوار است.
-
بر اساس روش نشانگر، معایب در کاربردهای نقشه پیوسته در مقیاس بزرگ آشکار است. پس از از دست رفتن اطلاعات تصویر نشانگر، دستگاه قادر نخواهد بود به حفظ اطلاعات موقعیت مکانی مربوط به تجسم نقشه AR ادامه دهد، اما در حالت جدول شنی دسکتاپ و حالت چشم پوشی در مقیاس کوچک، روش نشانگر از استحکام خوبی برخوردار است. و نیازی به محاسبه پیچیده و ثبت جغرافیایی اشیاء فضایی AR ندارد.
5. نتیجه گیری ها
منابع
- ادلر، دی. Kersten، TP Virtual and Augmented Reality in Spatial Visualization. KN-J. کارتوگر. Geogr. Inf. 2021 ، 71 ، 221-222. [ Google Scholar ] [ CrossRef ]
- دیکمن، اف. کیل، جی. دیکمن، پل. ادلر، دی. تأثیر تکنیکهای واقعیت افزوده بر تجسم کارتوگرافی. KN-J. کارتوگر. Geogr. Inf. 2021 ، 71 ، 285-295. [ Google Scholar ] [ CrossRef ]
- رومائو، تی. رومرو، ال. دیاس، ای. دانادو، ج. کوریا، ن. ترابوکو، ای. سانتوس، سی. سانتوس، آر. نوبر، ای. Câmara، A. تقویت واقعیت با اطلاعات جغرافیایی مرجع برای مدیریت محیطی. در مجموعه مقالات دهمین سمپوزیوم بینالمللی ACM در مورد پیشرفتها در سیستمهای اطلاعات جغرافیایی-GIS ’02, McLean, VA, USA, 8-9 نوامبر 2002. ACM Press: نیویورک، نیویورک، ایالات متحده آمریکا، 2002; پ. 175. [ Google Scholar ]
- لیاروکاپیس، اف. گریت بچ، آی. کوه، دی. گونش، ع. بروژیک-اکرتیک، وی. رپر، جی. تکنیکهای واقعیت افزوده موبایل برای تجسم جغرافیایی. نهم بین المللی Conf. Inf. Vis. 2005 ، 2005 ، 745-751. [ Google Scholar ] [ CrossRef ]
- هوسکونن، جی. Oksanen، T. نمونه برداری خاک با هواپیماهای بدون سرنشین و واقعیت افزوده در کشاورزی دقیق. محاسبه کنید. الکترون. کشاورزی 2018 ، 154 ، 25-35. [ Google Scholar ] [ CrossRef ]
- Vaughan، KL; وان، RE; Seeley، JM Experiential Learning در علوم خاک: استفاده از یک جعبه شنی واقعیت افزوده. نات علمی آموزش. 2017 ، 46 ، 1-5. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- چاتزوپولوس، دی. برمجو، سی. هوانگ، ز. Hui, P. Mobile Reality Survey: از جایی که هستیم تا جایی که می رویم. IEEE Access 2017 ، 5 ، 6917–6950. [ Google Scholar ] [ CrossRef ]
- Koegst، L. پتانسیل های گشت و گذار با هدایت دیجیتالی در دانشگاه ها با استفاده از مثال یک سفر جغرافیایی شهری در اشتوتگارت نشان داده شده است. KN-J. کارتوگر. Geogr. Inf. 2022 ، 72 ، 59-71. [ Google Scholar ] [ CrossRef ]
- هیوگ، او. سیوتات، جی.-م. Guitton، P. GIS و واقعیت افزوده: وضعیت هنر و مسائل. در کتابچه راهنمای واقعیت افزوده ; Furht، B.، Ed. Springer: نیویورک، نیویورک، ایالات متحده آمریکا، 2011; صص 721-740. شابک 978-1-4614-0063-9. [ Google Scholar ]
- هوانگ، ک. وانگ، سی. وانگ، اس. لیو، آر. چن، جی. Li, X. یک چارچوب رندر نقشه کارآمد و مستقل از پلتفرم برای واقعیت افزوده موبایل. ISPRS Int. J. Geo-Inf. 2021 ، 10 ، 593. [ Google Scholar ] [ CrossRef ]
- وانگ، ز. بای، ایکس. ژانگ، اس. بیلینگ هرست، ام. او، دبلیو. وانگ، ی. هان، دی. چن، جی. لی، جی. نقش دستورالعمل AR کاربر محور در بهبود شناخت فضایی تازه کار در یک کار رویه ای با دقت بالا. Adv. مهندس به اطلاع رساندن. 2021 ، 47 ، 101250. [ Google Scholar ] [ CrossRef ]
- نرزت، دبلیو. پومبرگر، جی. فرشا، ع. کلب، دی. مولر، آر. ویگاردت، جی. هورتنر، اچ. Lindinger, C. یک مفهوم تجسم جدید برای سیستم های ناوبری. در مجموعه مقالات پارادایم های تعامل کاربر محور برای دسترسی جهانی در جامعه اطلاعاتی، وین، اتریش، 28-29 ژوئن 2004. Stary, C., Stephanidis, C., Eds. Springer: برلین/هایدلبرگ، آلمان، 2004; صص 440-451. [ Google Scholar ]
- نرزت، دبلیو. پومبرگر، جی. فرشا، ع. کلب، دی. مولر، آر. ویگاردت، جی. هورتنر، اچ. Lindinger, C. سیستم های ناوبری واقعیت افزوده. یونیورسال دسترسی به Inf. Soc. 2006 ، 4 ، 177-187. [ Google Scholar ] [ CrossRef ]
- دی هان، جی. پیگیلت، اچ. پست، ناوبری فضایی FH برای نظارت تصویری آگاه از زمینه. محاسبات IEEE. نمودار. Appl. 2010 ، 30 ، 20-31. [ Google Scholar ] [ CrossRef ] [ PubMed ]
- لیو، بی. منگ، L. کنفرانس دکتری – به سوی یک رابط کاربری بهتر از برنامه ناوبری داخلی مبتنی بر واقعیت افزوده. در مجموعه مقالات ششمین کنفرانس بین المللی 2020 شبکه تحقیقاتی یادگیری فراگیر (iLRN)، سن لوئیس اوبیسپو، کالیفرنیا، ایالات متحده آمریکا، 21 تا 25 ژوئن 2020؛ IEEE: منهتن، نیویورک، ایالات متحده آمریکا، 2020؛ صص 392-394. [ Google Scholar ]
- تمپلین، تی. پوپیلارچیک، دی. Gryszko، M. استفاده از واقعیت افزوده و مجازی (AR/VR) برای پشتیبانی از ناوبری ایمن در مناطق آبی داخلی و ساحلی. Remote Sens. 2022 , 14 , 1520. [ Google Scholar ] [ CrossRef ]
- استیلیانیدیس، ای. والاری، ای. پاگانی، ع. کاریلو، آی. کونودس، ا. مایکل، ک. Smagas، K. تجسم جغرافیایی واقعیت افزوده برای تاسیسات زیرزمینی. PFG-J. فتوگرام سنسور از راه دور Geoinf. علمی 2020 ، 88 ، 173-185. [ Google Scholar ] [ CrossRef ]
- ژنگ، م. تجسم واقعیت افزوده در محل مبتنی بر مکان Campbell، AG برای ناوبری میدان کشاورزی اعمال شد. در مجموعه مقالات سمپوزیوم بین المللی IEEE 2019 در مورد واقعیت ترکیبی و افزوده (ISMAR-Adjunct)، پکن، چین، 10 تا 18 اکتبر 2019؛ IEEE: منهتن، نیویورک، ایالات متحده آمریکا، 2019؛ ص 93-97. [ Google Scholar ]
- جین، ی. سئو، جی. لی، جی جی; آن، اس. هان، S. واقعیت افزوده فضایی مبتنی بر BIM (SAR) برای همکاری در طراحی معماری: اثبات مفهوم. Appl. علمی 2020 ، 10 ، 5915. [ Google Scholar ] [ CrossRef ]
- لیوینگستون، MA; Ai، Z. کارش، ک. Gibson، طراحی رابط کاربری GO برای برنامه های کاربردی AR نظامی. واقعی مجازی. 2011 ، 15 ، 175-184. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- ما، دبلیو. شیونگ، اچ. دای، ایکس. ژنگ، ایکس. ژو، ی. مکانیزم ثبت سه بعدی مبتنی بر تشخیص صحنه داخلی برای تجسم AR-GIS در زمان واقعی در برنامه های موبایل. ISPRS Int. J. Geo-Inf. 2018 ، 7 ، 112. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- محمود، ب. هان، اس. لی، دی.-ای. ثبت و بومی سازی ابرهای نقطه سه بعدی صحنه های داخلی با استفاده از ویژگی های هندسی برای واقعیت افزوده مبتنی بر BIM. Remote Sens. 2020 , 12 , 2302. [ Google Scholar ] [ CrossRef ]
- ورنیکا، تی. هانکه، آ. برنشتاین، WZ بهرهبرداری از نمایشهای مکانی استاندارد برای واقعیت افزوده صنعتی. در مجموعه مقالات یازدهمین اجلاس سازمانی مبتنی بر مدل (MBE 2020)، Gaithersburg، MD، ایالات متحده، 31 مارس تا 2 آوریل 2020؛ ص 184-190. [ Google Scholar ]
- شیونگ، اچ. ما، دبلیو. ژنگ، ایکس. گونگ، جی. Abdelalim, D. تکسچرینگ صحنه داخلی بر اساس تصاویر تک تلفن همراه و مدل سه بعدی فیوژن. بین المللی جی دیجیت. زمین 2019 ، 12 ، 525–543. [ Google Scholar ] [ CrossRef ]
- هوانگ، ک. وانگ، سی. لیو، آر. Chen, G. یک روش گیرکردن هدف فضایی سریع و دقیق برای مدلسازی و نقشهبرداری صحنه سهبعدی در واقعیت افزوده موبایل. ISPRS Int. J. Geo-Inf. 2022 ، 11 ، 69. [ Google Scholar ] [ CrossRef ]
- مک نیل، KS; رایکر، ک. ویتمایر، اس. جورجیس، س. اتکینز، آر. لادو، ن. کلارک، سی. سولتیس، ن. پینگل، تی. یک مطالعه چند نهادی در مورد فعالیتهای آزمایشگاهی مبتنی بر تحقیق با استفاده از ماسهبازی واقعیت افزوده: تأثیرات بر یادگیری دانشجویان مقطع کارشناسی. جی. جئوگر. بالا. آموزش. 2020 ، 44 ، 85-107. [ Google Scholar ] [ CrossRef ]
- سانچز، S.Á. مارتین، LD; گیمنو گونزالس، ام. مارتین-گارسیا، تی. آلماراز-منندز، ف. Ruiz, C. Sandbox واقعیت افزوده: بستری برای تجربیات آموزشی. در مجموعه مقالات چهارمین کنفرانس بین المللی اکوسیستم های فناورانه برای تقویت چندفرهنگی، سالامانکا، اسپانیا، 2 تا 4 نوامبر 2016. ACM Press: نیویورک، نیویورک، ایالات متحده آمریکا، 2016; جلد 27، ص 599–602. [ Google Scholar ]
- پتراسووا، آ. هارمون، بی. پتراس، وی. تبریزیان، پ. میتاسووا، اچ. مدلسازی ملموس با GIS منبع باز. ; انتشارات بین المللی اسپرینگر: چم، سوئیس، 2018; شابک 978-3-319-89302-0. [ Google Scholar ]
- افروز، ع. بالال، اچ. Pettit, C. پیاده سازی Sandbox واقعیت افزوده در Geodesign: A Future. ISPRS Ann. فتوگرام حسگر از راه دور اسپات. Inf. علمی 2018 ، 4 ، 5-12. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- وودز، TL; رید، اس. Hsi، S. Woods, JA; مطالعه آزمایشی Woods، MR با استفاده از Sandbox واقعیت افزوده برای آموزش نقشههای توپوگرافی و فرآیندهای سطحی در آزمایشگاههای زمینشناسی مقدماتی. جی. ژئوشی. آموزش. 2016 ، 64 ، 199-214. [ Google Scholar ] [ CrossRef ]
- جورج، آر. هویت، سی. اوکلی، جی. استفاده کودکان خردسال از یک ماسه باکس واقعیت افزوده برای تقویت تفکر فضایی. کودک. Geogr. 2020 ، 18 ، 209-221. [ Google Scholar ] [ CrossRef ]
- Carbonell Carrera، C.; Bermejo Asensio، LA واقعیت افزوده به عنوان یک محیط آموزشی دیجیتالی برای توسعه تفکر فضایی. کارتوگر. Geogr. Inf. علمی 2017 ، 44 ، 259-270. [ Google Scholar ] [ CrossRef ]
- او، جی. ژو، ی. تان، ایکس. لی، ایکس. Guo, X. یک روش مبتنی بر صفحه موازی برای ارائه چند خطوط و چند ضلعی در سطوح زمین. محاسبه کنید. Geosci. 2017 ، 99 ، 19-27. [ Google Scholar ] [ CrossRef ]
- او، جی. لی، سی. لی، جی. Wei, Q. روشی کارآمد برای رندر کردن نمادهای خطی در زمین های سه بعدی با استفاده از زبان شیدر. بین المللی جی. جئوگر. Inf. علمی 2018 ، 32 ، 476-497. [ Google Scholar ] [ CrossRef ]
- وو، ام. چن، تی. ژانگ، ک. جینگ، ز. هان، ی. چن، ام. وانگ، اچ. Lv، G. یک روش تجسم کارآمد برای داده های چند ضلعی با ساده سازی پویا. ISPRS Int. J. Geo-Inf. 2018 ، 7 ، 138. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- گو، ام. هوانگ، ی. Xie, Z. یک رویکرد تجزیه متوازن برای تجسم در زمان واقعی نقشه های برداری بزرگ در CyberGIS. جلو. محاسبه کنید. علمی 2015 ، 9 ، 442-455. [ Google Scholar ] [ CrossRef ]
- احمد، دبلیو. ضیاء، ع. خالد، U. یک شبکه اجتماعی مبتنی بر نقشه گوگل (GMBSN) برای کاوش اطلاعات در مورد یک منطقه خاص. جی. سافتو. مهندس Appl. 2013 ، 06 ، 343-348. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- نتک، آر. ماسوپوست، ج. پاولیچک، اف. Pechanec، V. تست عملکرد بر روی کاشی های نقشه برداری در مقابل نقشه شطرنجی-مطالعه مقایسه ای روی سنجه های بار. ISPRS Int. J. Geo-Inf. 2020 ، 9 ، 101. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- لی، ال. هو، دبلیو. زو، اچ. لی، ی. Zhang، H. مدل دادههای برداری کاشیشده برای ویژگیهای جغرافیایی نقشههای نمادین. PLoS ONE 2017 , 12 , e0176387. [ Google Scholar ] [ CrossRef ] [ PubMed ][ نسخه سبز ]
- هو، دبلیو. لی، ال. وو، سی. ژانگ، اچ. زو، اچ. یک روش موازی برای تسریع تجسم و تعامل برای کاشی های برداری. PLoS ONE 2019 , 14 , e0221075. [ Google Scholar ] [ CrossRef ] [ PubMed ][ نسخه سبز ]
- گوو، ام. هوانگ، ی. گوان، کیو. زی، ز. Wu, L. سازماندهی کارآمد داده و استراتژی زمانبندی برای تسریع در ارائه داده های برداری بزرگ. ترانس. GIS 2017 ، 21 ، 1217-1236. [ Google Scholar ] [ CrossRef ]
- ژو، ز. کارلکار، ج. هی، دی. اشنایدر، ام. لو، دبلیو. Wittkopf، S. برآورد پوس قوی برای واقعیت ترکیبی در فضای باز با همجوشی حسگر. در یادداشت های سخنرانی در علوم کامپیوتر (شامل یادداشت های سخنرانی های فرعی در هوش مصنوعی و یادداشت های سخنرانی در بیوانفورماتیک) ؛ Stephanidis, C., Ed. Springer: برلین/هایدلبرگ، آلمان، 2009; جلد 5616 LNCS، ص 281-289. ISBN 3642027121. [ Google Scholar ]
- Rabbi, I. تکنیک های ردیابی واقعیت افزوده: یک پروتکل مروری نظام مند ادبیات. IOSR J. Comput. مهندس 2012 ، 2 ، 23-29. [ Google Scholar ] [ CrossRef ]
- پنچال، ک. شاه، اچ. تشخیص چهره سه بعدی بر اساس تصحیح ژست با استفاده از روش زاویه اویلر. در مجموعه مقالات کنفرانس بین المللی Proceedings-2013 در مورد تحقیق و پیشرفت هوش ماشینی، ICMIRA 2013، Katra JK، هند، 21-23 دسامبر 2013. IEEE: منهتن، نیویورک، ایالات متحده آمریکا، 2013؛ صص 467-471. [ Google Scholar ]
- پورتالس، سی. لرما، جی ال. ناوارو، S. واقعیت افزوده و فتوگرامتری: هم افزایی برای تجسم محیط های فیزیکی و شهری مجازی. ISPRS J. Photogramm. Remote Sens. 2010 ، 65 ، 134-142. [ Google Scholar ] [ CrossRef ]
- ژو، ز. وانگ، ال. پوپسکو، V. یک چیدمان متحدالمرکز تا حدی مرتب شده برای بومی سازی کارآمد برچسب در واقعیت افزوده. IEEE Trans. Vis. محاسبه کنید. نمودار. 2021 ، 27 ، 4087-4096. [ Google Scholar ] [ CrossRef ]
- تیان، ی. لانگ، ی. شیا، دی. یائو، اچ. ژانگ، جی. مدیریت انسداد در واقعیت افزوده بر اساس روش بازسازی سه بعدی. محاسبات عصبی 2015 ، 156 ، 96-104. [ Google Scholar ] [ CrossRef ]
- تیان، ی. وانگ، ایکس. یائو، اچ. چن، جی. وانگ، ز. یی، L. کنترل انسداد با استفاده از تکنیکهای حجم متحرک و ریختهگری پرتو برای سیستمهای واقعیت افزوده. چندتایی. ابزارهای کاربردی 2018 ، 77 ، 16561-16578. [ Google Scholar ] [ CrossRef ]
- جیا، جی. الزوویک، س. فن، اچ. یانگ، اس. لیو، جی. گوو، دبلیو. قهوهای مایل به زرد، CC; Ling, H. Semantic-Aware Label Placement for Augmented Reality in Street View. Vis. محاسبه کنید. 2021 ، 37 ، 1805-1819. [ Google Scholar ] [ CrossRef ]
- یوان، ال. یو، ز. لو، دبلیو. یی، ال. Lü, G. محاسبات روابط توپولوژیکی چند بعدی-یکپارچه: یک رویکرد مبتنی بر جبر هندسی سلسله مراتبی. بین المللی جی. جئوگر. Inf. علمی 2014 ، 28 ، 2435-2455. [ Google Scholar ] [ CrossRef ]
- پارکر، سی. Tomitsch, M. روندهای تجسم داده ها در برنامه های کاربردی واقعیت افزوده موبایل. در مجموعه مقالات هفتمین سمپوزیوم بین المللی ارتباطات و تعامل اطلاعات بصری – VINCI ’14، سیدنی، استرالیا، 5 تا 8 اوت 2014. ACM Press: نیویورک، نیویورک، ایالات متحده آمریکا، 2014. جلد 2014، ص 228-231. [ Google Scholar ]
- لی، جی.ای. دانسر، ا. کیم، اس. Billinghurst، M. CityViewAR: یک برنامه کاربردی AR در فضای باز موبایل برای تجسم شهر. در مجموعه مقالات یازدهمین سمپوزیوم بین المللی IEEE در مورد واقعیت ترکیبی و افزوده 2012—مقالات هنر، رسانه و علوم انسانی، ISMAR-AMH 2012، آتلانتا، GA، ایالات متحده آمریکا، 5-8 نوامبر 2012; IEEE: منهتن، نیویورک، ایالات متحده آمریکا، 2012؛ صص 57-64. [ Google Scholar ]
- چن، ک. لی، تی. کیم، اچ اس. کولر، دی. Katz، RH MARVEL: فعال کردن واقعیت افزوده موبایل با انرژی کم و تأخیر کم. در مجموعه مقالات شانزدهمین کنفرانس ACM در مورد سیستم های حسگر شبکه جاسازی شده، SenSys’18، شنژن، چین، 4 تا 7 نوامبر 2018؛ Ramachandran, GS, Krishnamachari, B., Eds. انجمن ماشینهای محاسباتی: نیویورک، نیویورک، ایالات متحده آمریکا؛ صص 292-304. [ Google Scholar ] [ CrossRef ]
- چولتکین، ا. لوچهد، آی. مدن، م. کریستف، اس. دوو، ا. پتیت، سی. قفل، O.; شوکلا، س. هرمان، ال. استاچون، ز. و همکاران واقعیت بسط یافته در علوم فضایی: مروری بر چالش های پژوهشی و جهت گیری های آینده. ISPRS Int. J. Geo-Inf. 2020 ، 9 ، 439. [ Google Scholar ] [ CrossRef ]
- Vince, J. Quaternions for Computer Graphics , 2nd ed.; Springer: لندن، انگلستان، 2011; پ. 181. [ Google Scholar ] [ CrossRef ]
- هالووی، تجزیه و تحلیل خطای ثبت RL برای واقعیت افزوده. Presence Teleoperators Virtual Environ. 1997 ، 6 ، 413-432. [ Google Scholar ] [ CrossRef ]
- مین، اس. لی، ال. وی، اچ. Xiang، R. ثبت تعاملی برای GIS واقعیت افزوده. در مجموعه مقالات کنفرانس بین المللی 2012 بینایی کامپیوتر در سنجش از دور، Xiamen، چین، 16-18 دسامبر 2012. IEEE: منهتن، نیویورک، ایالات متحده آمریکا، 2012؛ صص 246-251. [ Google Scholar ]
- رایت مایر، جی. Schmalstieg, D. OpenTracker-معماری نرم افزار باز برای ردیابی قابل تنظیم مجدد بر اساس XML. در مجموعه مقالات واقعیت مجازی IEEE 2001، یوکوهاما، ژاپن، 13 تا 17 مارس 2001. IEEE: منهتن، نیویورک، ایالات متحده آمریکا، 2001؛ ص 285-286. [ Google Scholar ]
- کسپری، ج. ادواردسون، نماینده مجلس؛ رومرو، ام. انسداد در واقعیت افزوده فضای باز با استفاده از دادههای ساختمان جغرافیایی. در مجموعه مقالات سمپوزیوم ACM در نرم افزار و فناوری واقعیت مجازی، VRST، گوتنبرگ، سوئد، 8 تا 10 نوامبر 2017. ACM: نیویورک، نیویورک، ایالات متحده آمریکا، 2017؛ صص 1-10. [ Google Scholar ]
- فوگلیارونی، پ. مازورکیویچ، بی. کاتنبک، ام. جیانوپولوس، I. واقعیت افزوده با آگاهی جغرافیایی برای VGI. Adv. کارتوگر. GIScience ICA 2019 ، 2 ، 1-9. [ Google Scholar ] [ CrossRef ]
- نیومن، جی. واگنر، ام. بائر، ام. مک ویلیامز، ای. پینتاریک، تی. بیر، دی. پوستکا، دی. استراسر، اف. اشمالستیگ، دی. کلینکر، جی. ردیابی همه جا حاضر برای واقعیت افزوده. در مجموعه مقالات ISMAR 2004: سومین سمپوزیوم بین المللی IEEE و ACM در مورد واقعیت ترکیبی و افزوده، آرلینگتون، VA، ایالات متحده آمریکا، 2 تا 5 نوامبر 2004. IEEE: منهتن، نیویورک، ایالات متحده آمریکا، 2004; صص 192-201. [ Google Scholar ]
- لی، دبلیو. هان، ی. لیو، ی. زو، سی. رن، ی. وانگ، ی. Chen, G. رندر زمان واقعی بر اساس موقعیت مکانی خطوط لوله زیرزمینی شهری. ISPRS Int. J. Geo-Inf. 2018 ، 7 ، 32. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- هوانگ، دبلیو. سان، م. لی، اس. یک مکانیسم ثبت تعاملی مبتنی بر GIS سه بعدی برای سیستم واقعیت افزوده فضای باز. سیستم خبره Appl. 2016 ، 55 ، 48-58. [ Google Scholar ] [ CrossRef ]
- ژانگ، ایکس. فرونز، اس. نواب، ن. تشخیص و رمزگشایی نشانگر بصری در سیستمهای AR: یک مطالعه تطبیقی. در مجموعه مجموعه مقالات – سمپوزیوم بین المللی در مورد واقعیت ترکیبی و افزوده، ISMAR 2002، دارمشتات، آلمان، 30 سپتامبر تا 1 اکتبر 2002. IEEE: منهتن، نیویورک، ایالات متحده آمریکا، 2002؛ صص 97-106. [ Google Scholar ]
- خان، د. الله، س. Rabbi، I. ایجاد نشانگر با لبه تیز، بدون نویز و متمایز (SDD) برای ARToolKit. در ارتباطات در علوم کامپیوتر و اطلاعات ; Springer: برلین/هایدلبرگ، آلمان، 2014; جلد 465، صص 396–407. [ Google Scholar ]
- ننوسکی، بی. Nedelkovski، I. شناسایی و ردیابی اشیاء در فضای باز با استفاده از نشانگرهای Artoolkit. بین المللی جی. کامپیوتر. علمی Inf. تکنولوژی 2019 ، 11 ، 21-28. [ Google Scholar ] [ CrossRef ]
- هان، بی. رابرتز، دبلیو. وو، دی. Li, J. ردیابی شیء مبتنی بر ویژگی قوی. در مجموعه مقالات الگوریتم ها برای تصاویر رادار دیافراگم مصنوعی XIV، اورلاندو، FL، ایالات متحده آمریکا، 10-11 آوریل 2007. Zelnio، EG، Garber، FD، Eds. SPIE: Bellingham, WA, USA, 2007; جلد 6568، ص. 65680U. [ Google Scholar ]
- فن، ال. ریهیماکی، م. Kunttu، I. یک رویکرد ردیابی شی مبتنی بر ویژگی برای پردازش بیدرنگ تصویر در دستگاه های تلفن همراه. در مجموعه مقالات – کنفرانس بین المللی پردازش تصویر، ICIP، هنگ کنگ، چین، 26-29 سپتامبر 2010. IEEE: منهتن، نیویورک، ایالات متحده آمریکا، 2010؛ صص 3921–3924. [ Google Scholar ]
- بوهیونگ، اچ. دیویس، ال. ردیابی شی با استخراج ویژگی تطبیقی. در مجموعه مقالات کنفرانس بین المللی 2004 در مورد پردازش تصویر، 2004. ICIP ’04، سنگاپور، 24-27 اکتبر 2004; IEEE: منهتن، نیویورک، ایالات متحده آمریکا، 2004; جلد 3، ص 1501–1504. [ Google Scholar ]
- فتحیان، ک. رامیرز-پاردس، جی پی. Doucette، EA؛ کرتیس، جی دبلیو. Gans، NR QuEst: یک رویکرد مبتنی بر کواترنیون برای تخمین حرکت دوربین از نقاط ویژگی حداقل. ربات IEEE. خودکار Lett. 2018 ، 3 ، 857-864. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- رزا، اس. توسکانا، جی. Bona، B. Q-PSO: تخمین پوز مبتنی بر کواترنیون سریع از تصاویر RGB-D. جی. اینتل. ربات. سیستم تئوری کاربردی 2018 ، 92 ، 465-487. [ Google Scholar ] [ CrossRef ]
- Seo, E.-H.; پارک، سی.-اس. کیم، دی. آهنگ، J.-B. تخمین جهت گیری مبتنی بر کواترنیون با کاهش خطای استاتیکی. در مجموعه مقالات کنفرانس بین المللی IEEE 2011 در مورد مکاترونیک و اتوماسیون، پکن، چین، 7 تا 10 اوت 2011. IEEE: منهتن، نیویورک، ایالات متحده آمریکا، 2011؛ صفحات 1624-1629. [ Google Scholar ]
- De Paor، DG محاسبات جهتگیریها برای سیستم اطلاعات جغرافیایی – “رول” کواترنیونها. محاسبه کنید. Methods Geosci. 1996 ، 15 ، 447-456. [ Google Scholar ]
- Ude، A. حداقل مربعات غیرخطی بهینه سازی توابع کواترنیون واحد برای تخمین پوس از ویژگی های مربوطه. در مجموعه مقالات چهاردهمین کنفرانس بین المللی تشخیص الگو (Cat. No.98EX170)، بریزبن، استرالیا، 16-20 اوت 1998; IEEE: منهتن، نیویورک، ایالات متحده آمریکا، 1998؛ جلد 1، ص 425–427. [ Google Scholar ]
- مارینز، جی ال. یون، ایکس. باخمن، ER; مک گی، آر.بی. Zyda، MJ یک فیلتر کالمن توسعه یافته برای تخمین جهت گیری مبتنی بر کواترنیون با استفاده از حسگرهای MARG. در مجموعه مقالات کنفرانس بین المللی IEEE/RSJ 2001 در مورد ربات ها و سیستم های هوشمند. گسترش نقش اجتماعی رباتیک در هزاره بعدی (Cat. No.01CH37180)، Maui، HI، ایالات متحده آمریکا، 29 اکتبر تا 3 نوامبر 2001. IEEE: منهتن، نیویورک، ایالات متحده آمریکا، 2001؛ جلد 4، ص 2003–2011. [ Google Scholar ]
- کیم، آ. گل نراقی، MF الگوریتم تخمین جهت گیری کواترنیونی با استفاده از واحد اندازه گیری اینرسی. In Proceedings of the Record—IEEE PLANS, Position Location and Navigation Symposium, Monterey, CA, USA, 26-19 آوریل 2004. IEEE: منهتن، نیویورک، ایالات متحده آمریکا، 2004; صص 268-272. [ Google Scholar ]
- سلام.؛ جیانگ، سی. هو، سی. شین، جی. وو، کیو. Wang, F. الگوریتم تخمین موقعیت خطی بر اساس کواترنیون. در یادداشت های سخنرانی در علوم کامپیوتر (از جمله یادداشت های سخنرانی های فرعی در هوش مصنوعی و یادداشت های سخنرانی در بیوانفورماتیک) ؛ Springer: برلین/هایدلبرگ، آلمان، 2011; جلد 6838 LNCS، ص 303-310. ISBN 9783642247279. [ Google Scholar ]
- جیان، اچ. فن، ایکس. لیو، جی. جین، Q. Kang, X. یک روش مدلسازی سه بعدی تکهای مبتنی بر کواترنیون برای شبکههای مسیر داخلی. ISPRS Int. J. Geo-Inf. 2019 ، 8 ، 89. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- گیتا، اس. عنبراسی، لی ج. پراساد، AV; گوپتا، ا. برنامه واقعیت افزوده راج، BE. در ورودی چند رسانه ای و حسی برای واقعیت افزوده، ترکیبی و مجازی ؛ Tyagi، AK، اد. IGI Global: Hershey، PA، ایالات متحده آمریکا، 2021؛ صص 118-133. [ Google Scholar ]
- چنگ، ی. زو، جی. یانگ، سی. میائو، جی. Ge, W. ویژگی های تحقیقات نقشه افزوده از دیدگاه نقشه برداری. کارتوگر. Geogr. Inf. علمی 2022 ، 1-17. [ Google Scholar ] [ CrossRef ]
- بوبریچ، جی. Otto, S. Augmented Maps. بین المللی قوس. فتوگرام حسگر از راه دور اسپات. Inf. علمی 2002 ، 34 ، 502-505. [ Google Scholar ]
- ورنر، پی. بررسی پیادهسازی واقعیت افزوده در نقشهها و تصاویر آنالوگ و دیجیتال مرجع جغرافیایی. اطلاعات 2018 ، 10 ، 12. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- دوو، ا. هوراو، سی. بردیف، م. کریستف، اس. ژئوتصویرسازی شهری سه بعدی: آزمایشهای واقعیت افزوده و ترکیبی درجا. ISPRS Ann. فتوگرام حسگر از راه دور اسپات. Inf. علمی 2018 ، 4 ، 41-48. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- لی، جی. Billinghurst, M. CityViewAR Outdoor AR Visualization. در مجموعه مقالات سیزدهمین کنفرانس بینالمللی فصل NZ از گروه علاقهمند ویژه ACM در مورد تعامل انسان-رایانه – CHINZ ’12، Dunedin، نیوزیلند، 2 تا 3 ژوئیه 2012; ACM Press: نیویورک، نیویورک، ایالات متحده آمریکا، 2012; پ. 97. [ Google Scholar ]
- Fenais، AS; آریاراتنام، ST; آیر، SK; اسمیلوفسکی، ن. مروری بر واقعیت افزوده اعمال شده در ساخت و ساز زیرزمینی. J. Inf. تکنولوژی ساخت و ساز 2020 ، 25 ، 308-324. [ Google Scholar ] [ CrossRef ]
- سو، جی. لی، اس. Choi, Y. UMineAR: سیستم پشتیبانی بررسی سایت خطر مین رها شده مبتنی بر تبلت موبایل با استفاده از واقعیت افزوده. Minerals 2017 , 7 , 198. [ Google Scholar ] [ CrossRef ][ Green Version ]
- پنیا-ریوس، آ. هاگراس، اچ. گاردنر، ام. Owusu, G. یک سیستم مبتنی بر منطق فازی نوع 2 برای تجسم واقعیت افزوده داده های جغرافیایی مرجع. در مجموعه مقالات کنفرانس بین المللی IEEE در مورد سیستم های فازی، ریودوژانیرو، برزیل، 8 تا 13 ژوئیه 2018؛ IEEE: منهتن، نیویورک، ایالات متحده آمریکا، 2018؛ جلد 2018، صص 1-8. [ Google Scholar ]
- د آلمیدا پریرا، جی اچ. سهام، K. استاماتو دلازاری، ل. Centeno، واقعیت افزوده JAS و نقشه ها: امکانات جدید برای تعامل با داده های جغرافیایی. کارتوگر. J. 2017 ، 54 ، 313-321. [ Google Scholar ] [ CrossRef ]
- آدیتیا، سی. کوسیک، ک. نامراتا، دی. ناگلی، وی اس. شریواستاوا، اس. Rakshit، S. رویکرد واقعیت افزوده برای تجسم نقشه کاغذی. در مجموعه مقالات کنفرانس بین المللی 2010 در زمینه ارتباطات و هوش محاسباتی، INCOCCI-2010، تامیل نادو، هند، 27-29 دسامبر 2010. صص 352-356. [ Google Scholar ]
- رید، اس.-ای. کریلوس، او. Hsi، S. کلوگ، L.-H.; شلادو، جی. ییکیلماز، م.-ب. سگال، اچ. سیلورمن، جی. یالوویتز، اس. Sato, E. Shaping Watersheds Exhibit: An Interactive, Augmented Reality Sandbox برای پیشرفت آموزش علوم زمین. در مجموعه مقالات چکیده نشست پاییز AGU، سانفرانسیسکو، کالیفرنیا، ایالات متحده آمریکا، 15-19 دسامبر 2014. جلد 2014، ص. ED34A-01. [ Google Scholar ]
- یانگ، ال. نورماند، جی.-ام. Moreau, G. تقویت نقشههای کاغذی خارج از قفسه با استفاده از تشخیص تقاطع و سیستمهای اطلاعات جغرافیایی. در مجموعه مقالات چهاردهمین کنفرانس بین المللی IAPR در سال 2015 در مورد کاربردهای بینایی ماشین (MVA)، توکیو، ژاپن، 18 تا 22 مه 2015؛ IEEE: منهتن، نیویورک، ایالات متحده آمریکا، 2015؛ صص 190-193. [ Google Scholar ]
- شونینگ، جی. لوختفلد، ام. روهس، ام. کروگر، آ. کراتز، اس. چراغ مشعل نقشه: واحد پروژکتور دوربین واقعیت افزوده موبایل. در مجموعه مقالات کنفرانس عوامل انسانی در سیستم های محاسباتی – مجموعه مقالات، بوستون، MA، ایالات متحده، 4-9 آوریل 2009. ACM Press: نیویورک، نیویورک، ایالات متحده آمریکا، 2009; صص 3841–3845. [ Google Scholar ]
- رن، ایکس. سان، م. جیانگ، سی. لیو، ال. Huang, W. یک روش ثبت جغرافیایی واقعیت افزوده برای محلیسازی هدف زمینی از یک پلتفرم پهپاد کمهزینه. Sensors 2018 , 18 , 3739. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- دیبل، جی. نشان دهنده نگرش: زوایای اویلر، کواترنیون های واحد و بردارهای چرخشی. ماتریس 2006 ، 58 ، 1-35. [ Google Scholar ]
- خو، اچ. لو، جی. شنگ، ی. ژو، ال. گوا، اف. شانگ، ز. Wang, J. عملیات فضایی سه بعدی GIS بر اساس اپراتورهای اویلر توسعه یافته. در مجموعه مقالات ژئوانفورماتیک 2008 و کنفرانس مشترک GIS و محیط ساخته شده: شبیه سازی جغرافیایی و محیط های مجازی GIS، گوانگژو، چین، 28-29 ژوئن 2008. لیو، L.، لی، X.، لیو، K.، Zhang، X.، چن، A.، ویرایش. SPIE: Bellingham, WA, USA, 2008; جلد 7143، ص. 71433D. [ Google Scholar ]
- Laksono, A. استفاده از موتور بازی برای تجسم داده های توپوگرافی سه بعدی تعاملی. ISPRS Int. J. Geo-Inf. 2019 ، 8 ، 361. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- شما، اس. Neumann، U. Fusion of Vision و Gyro Tracking برای ثبت واقعیت افزوده قوی. در مجموعه مقالات IEEE Virtual Reality 2001، یوکوهاما، ژاپن، 13-17 مارس 2001. ص 71-78. [ Google Scholar ]
- تید، ز. دنگ، جی. پس انتشار فضایی مماس برای گروههای تبدیل سه بعدی. در مجموعه مقالات کنفرانس IEEE/CVF 2021 در مورد دید رایانه و تشخیص الگو (CVPR)، مجازی، 19 تا 25 ژوئن 2021؛ IEEE: منهتن، نیویورک، ایالات متحده آمریکا، 2021؛ ص 10333–10342. [ Google Scholar ]


بدون دیدگاه