

کلید واژه ها:
پیش بینی جریان ترافیک ؛ مدل سازی مکانی – زمانی شبکه کانولوشن گراف ; مکانیسم توجه
1. مقدمه
-
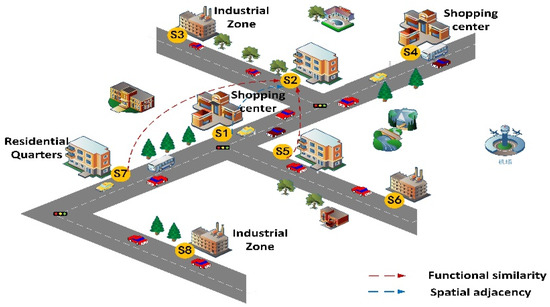
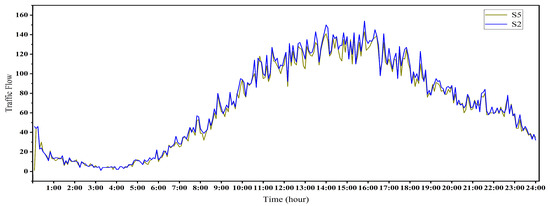
ما یک رویکرد مبتنی بر داده را برای ساختن نمودارهای تشابه معنایی طراحی می کنیم، که وابستگی های مکانی و زمانی جهانی پنهان را حفظ می کند. این ماتریس مجاورت مبتنی بر داده می تواند همبستگی های معنایی را استخراج کند که ممکن است در نمودار فضایی وجود نداشته باشد.
-
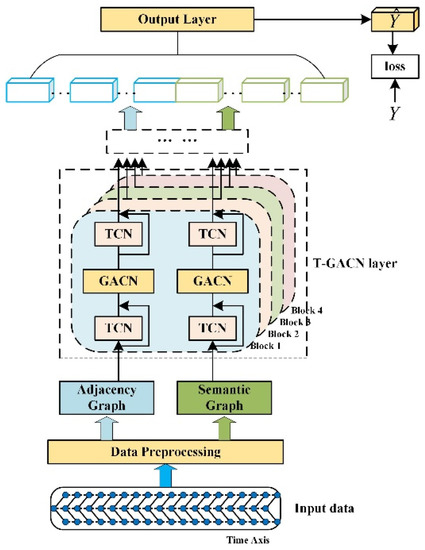
ما یک مدل STSGAN جدید مبتنی بر شبکههای کانولوشنی توجه گراف پیشنهاد میکنیم تا به طور موثر مشکل فشردن بیش از حد شبکه عصبی نمودار چند لایه را برطرف کند. ما با موفقیت شبکههای عمقی را مدلسازی میکنیم تا به طور همزمان وابستگیهای فضایی دوربرد با اهمیت متفاوت را ضبط کنیم. سپس از ماژول پیچیدگی علّی زمانی آبشاری برای تجزیه و تحلیل روابط علی بین زمان بلندمدت و کوتاهمدت بهطور موازی استفاده میشود تا به طور همزمان همبستگیهای زمانی محلی و جهانی دادههای ترافیک را ضبط کند.
-
آزمایشهای گستردهای روی دو مجموعه داده ترافیک دنیای واقعی برای ارزیابی منطقی STSGAN در این مقاله انجام شد. در مقایسه با خط پایه پیشرفته، مدل در این مقاله عملکرد پیشبینی بهتری در پیشبینی 1 ساعته دارد.
2. کارهای مرتبط
2.1. پیش بینی جریان ترافیک
2.2. شبکه کانولوشن گراف فضایی-زمانی
2.3. گراف شبکه توجه
3. مقدمات
تعریف 1.
تعریف 2.
تعریف 3.
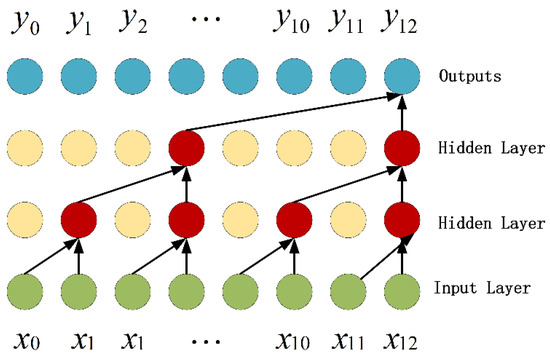
هدف پیشبینی جریان ترافیک مکانی-زمانی را میتوان به صورت زیر توصیف کرد: با توجه به کل شبکه ترافیک پبخش های زمانی تاریخی، مشاهدات از نرئوس، به عنوان تعریف شده است χ=(ایکسجی(تی-پ+1)،ایکسجی(تی-پ+2)⋯،ایکسجی(تی))∈ℝن×اف×پ. کارکرد fاز داده های مشاهده ترافیک آموخته می شود پمراحل زمانی تاریخی برای پیش بینی شرایط جریان ترافیک همه رئوس در شبکه جاده ها برای آینده سمراحل زمانی که به صورت مشخص شده است Y=(ایکسجی(تی)،ایکسجی(تی+1)⋯،ایکسجی(تی+س))∈ℝن×اف×س.
(ایکسجی(تی-پ+1)،ایکسجی(تی-پ+2)⋯،ایکسجی(تی))→Y=f(χ ;جی)(Yجی(تی)،Yجی(تی+1)⋯،Yجی(تی+س))،
4. روش شناسی
4.1. ساخت نقشه ترافیک
4.1.1. نمودار فضایی مجاورت ترافیک
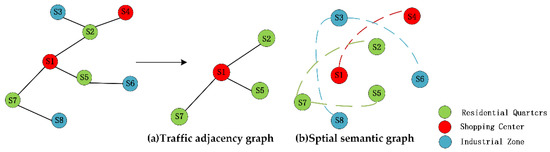
ماتریس مجاورت ترافیک مطابق STGCN ساخته شده است، همانطور که در شکل 4 a نشان داده شده است، تا نزدیکی بین گره ها را با توجه به فاصله هندسی بین گره های مختلف اندازه گیری کند. تابع فاصله مقادیر بین گره های دیگر را تعریف می کند. تابع فاصله به صورت زیر تعریف می شود.
آvمن،vjسپ={هایکسپ(-دvمن،vj2σ2) ، منf هایکسپ(-دvمن،vj2σ2)≥ϵ;0 ، oتیساعتهrwمنسه. ،
4.1.2. نمودار مکانی معنایی جهانی
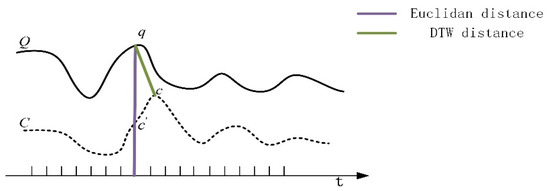
مجموع فاصله اقلیدسی د(qمن،جj)بین مکان های شبکه qمنو جjبه سری های دو زمانه تقسیم می شود. فاصله تجمعی کوچکترین عنصر همسایه که می تواند به نقطه برسد به عنوان فاصله تجمعی نشان داده می شود. γ(من،j). همانطور که در رابطه (3).
γ(من،j)=د(qمن،جj)+مترمنn{γ(من-1،j-1)،γ(من-1،j)،γ(من،j-1)}،
بنابراین، ماتریس مجاورت معنایی را با فاصله DTW به صورت زیر تعریف می کنیم.
آمنjسه={1 ،منf Dتیدبلیو(سمن،سیj)≤ϵ;0 ، oتیساعتهrwمنسه. ،
4.2. شبکه عصبی گراف مبتنی بر توجه
4.2.1. لایه پیچیدگی نمودار فضایی
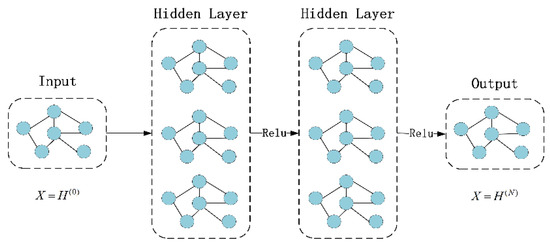
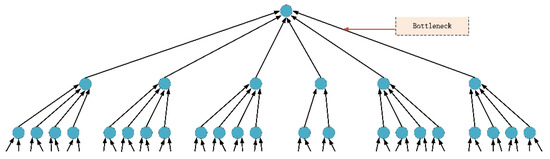
بیشتر کارها از رویکرد GCN برای ثبت همبستگیهای فضایی در ابعاد منطقهای استفاده میکنند، عملیاتهای کانولوشنی سنتی را از دادههای ساختاریافته به نمودارها گسترش میدهند، و آنها را قادر میسازد اطلاعات الگوی بدون ساختار پنهان در نمودار را ضبط کنند [ 35 ، 36 ، 37 ]. همانطور که در شکل 6 نشان داده شده است ، ایده GNN این است که اطلاعات مربوط به گره های همسایه را جمع آوری کند تا نمایشی به روز از گره ها تولید کند، و سپس نمایش را با تبدیل طرح ریزی خطی تجمیع کند و در نهایت آن را با غیر خطی فعال کند [ 42 ]. با این حال، چالشهایی در مدلسازی وابستگیهای بلندمدت بین دادههای با ابعاد بالا با استفاده از شبکههای کانولوشن گراف وجود دارد. اوری آلون و همکاران [ 17] نشان داد که GNN ها از فشرده سازی بیش از حد در هنگام اتصال سیگنال های راه دور به داده های آموزشی رنج می برند، نمی توانند پیام ها را از گره های مسافت دور هنگام انجام تعاملات از راه دور پخش کنند و در تجمیع ویژگی ها عملکرد ضعیفی دارند.
جیسین(اچ(ل+1))=σ(آ^اچ(ل)دبلیو(ل))،
4.2.2. لایه توجه نمودار
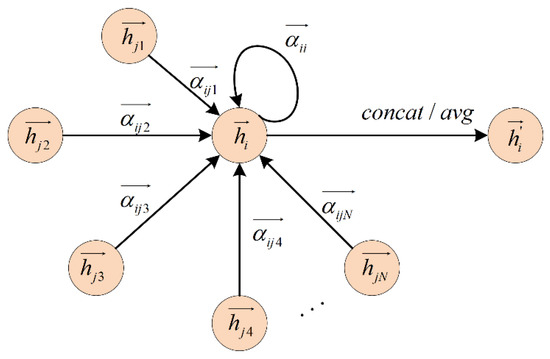
ما یک تابع تبدیل خطی قابل یادگیری را برای تبدیل ویژگی های ورودی به یک نمایش ویژگی سطح بالاتر اتخاذ کردیم. به همین دلیل، تبدیل خطی مشترک دبلیو∈ℝاف×اف”پارامتر با ماتریس وزن به هر گره اعمال می شود. سپس، از مکانیزم توجه مشترک استفاده می کنیم آبرای انجام خود توجهی بر روی هر جفت از ایکسمن→توجه و ایکسj→گره های توجه و امتیازات توجه را به صورت زیر محاسبه کنید:
نمره=آ(ایکسمن→wمن،ایکسj→wj)، wمن،wj∈اف×اف”،
جایی که wمنو wjاجزای ماتریس وزن هستند و آ(⋯)تابع عملکرد مکانیسم توجه است. به منظور مقایسه و تمایز ضرایب توجه بین گره های مختلف، از تابع softmax برای عادی سازی امتیازات ضریب توجه بین گره های همسایه برای به دست آوردن خروجی زیر استفاده می شود.
آمنj=softmx(نمره)=هایکسپ(نمره)∑ک∈نمنهایکسپ(نمرهمنک)،
ایکسمن”→=σ(∑j∈نمنآمنjایکسj→wj)،
جایی که نمنمجموعه همسایگان گره است مندر نمودار، و σتابع فعال سازی است.
4.3. ماژول پیچیدگی علّی زمانی
به طور خلاصه، TCN از یک FCN یک بعدی و یک پیچیدگی علّی [ 43 ، 46 ] تشکیل شده است، و پیچیدگی سببی متسع TCN به صورت زیر فرموله شده است.
yتی=Θ∗تیدایکستی=∑ک=0ک-1wکایکستی-دک،
4.3.1. پیچ خوردگی متسع
از آنجایی که فواصل مکانی نقاط مشاهده ما از یکدیگر دور هستند، همبستگی فضایی بین گره ها ممکن است یک ساعت یا حتی بیشتر همبستگی زمانی داشته باشد [ 37 ]. ما یک پیچیدگی TCN 4 لایه را برای استخراج ویژگی های همبستگی زمانی بلندمدت و کوتاه مدت محلی و جهانی قرار می دهیم. ورودی مدل یک سیگنال داده گراف ترافیک سه بعدی با χ∈ℝپ×ن×اف1، و یک پیچیدگی علی گسترده برای تولید استفاده می شود jتیساعتویژگی خروجی گره مندر زمان تیهمانطور که در رابطه (10) نشان داده شده است.
yتی،nمتر=ρ(Θn∗تیدχتیمتر)=ρ(∑من=1افمن∑ک=0ک-1دبلیوn،من،کχتی-دک،منمتر)،
جایی که 1≤n≤افO، yتی،nمتر∈ℝهست nتیساعتویژگی خروجی گره متردر زمان تی، و χتی-دک،nمتر∈ℝهست منتیساعتویژگی ورودی گره متردر زمان تی-دک. هسته Θn∈ℝک×افمنقابل آموزش است افOتعداد ویژگی های خروجی است.
تمام گرهها در نمودار شبکه جاده ترافیک با استفاده از همان هسته کانولوشن محاسبه میشوند تا ویژگیهای جدیدی برای هر گره ایجاد کنند. لایه کانولوشن مانند رابطه (11) محاسبه می شود.
y=ρ(Θ∗تیدχ)،
جایی که χ∈ℝپ×ن×افمننشان دهنده مشاهدات تاریخی کل شبکه ترافیک در گذشته است پبرش های زمانی به عنوان ورودی TCN، Θ∈ℝک×افمن×اف0نشان دهنده هسته پیچیدگی علّی و y∈ℝپ×ن×اف0خروجی لایه TCN است.
y(ل+1)=σ(Θل∗تیدy(ل))،
جایی که y(ل)ورودی از است للایه، y(ل+1)خروجی است، y(0)=χ، و د=2(ل)نرخ اتساع است لتیساعتلایه.
4.3.2. اتصال باقیمانده
4.4. خروجی فیوژن چند ماژول
خروجیهای اجزای مختلف با هم ترکیب میشوند و وزنهای تأثیر مجاورت و ماتریس معنایی برای هر گرهای که از دادههای تاریخی به دست میآید متفاوت است. بنابراین، پس از لایه T-GACN، عملیات ماکزیمم ادغام ابتدا برای تجمیع اطلاعات بر اساس اندازه وزن تأثیر به صورت انتخابی اجرا میشود و سپس از طریق لایه max-pooling به نتیجه پیشبینی نهایی تبدیل میشود. روند محاسبه به شرح زیر است.
Y^=دبلیوآ⊙Y^آ+دبلیوس⊙Y^س،
که در آن ⊙ کثرت هادامارد است و دبلیوآو دبلیوسپارامترهای یادگیری هستند که تأثیر دو ماتریس را بر هدف پیش بینی منعکس می کنند.
از آنجایی که ضرر هوبر نسبت به تلفات خطای مجذور حساسیت کمتری نسبت به نقاط گسسته دارد، ما ضرر هوبر (1992، STSGCN) [ 29 ] را انتخاب می کنیم.
L(Y،Y^)={12(Y-Y^)2 ،|Y-Y^|≤δ;δ|Y-Y^|-12δ2 ،oتیساعتهrwمنسه. ،
5. آزمایش کنید
5.1. مجموعه داده ها
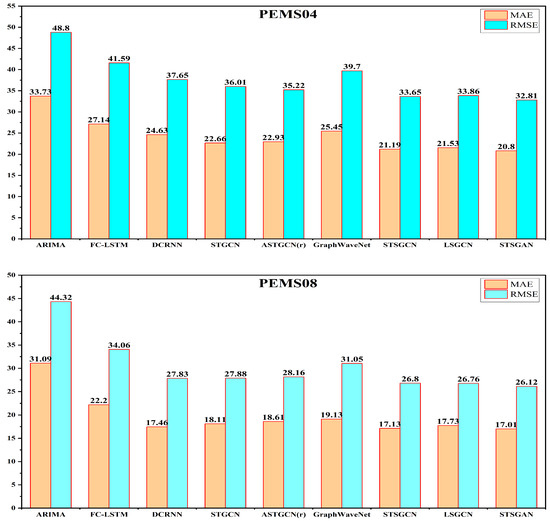
این آزمایش از دو معیار، از جمله MAE (میانگین مطلق خطا) و RMSE (خطای ریشه-میانگین مربع)، برای ارزیابی همه روش ها استفاده می کند، که به طور گسترده برای ارزیابی دقت مشکلات رگرسیون استفاده می شود. برای همه معیارها، هر چه مقدار کمتر باشد، بهتر است. آنها به عنوان تعریف می شوند
MAE(y^من،yمن)=1n∑من=1n|yمن-y^من|،
RMSE(y^من،yمن)=1n∑من=1n(yمن-y^من)2،
5.2. روش های پایه
-
ARIMA [ 23 ]: مدل میانگین متحرک یکپارچه اتورگرسیو، یک مدل آماری شناخته شده برای تجزیه و تحلیل سری های زمانی، از داده های گذشته برای پیش بینی روندهای آینده استفاده می کند.
-
FC-LSTM [ 49 ]: شبکههای حافظه کوتاهمدت (LSTM) با واحدهای پنهان کاملاً متصل، یک چارچوب شبکه شناخته شده هستند که در گرفتن وابستگیهای متوالی قوی هستند.
-
DCRNN [ 21 ] (Li et al., 2017): واحدهای بازگشتی دردار با پیچیدگی نمودار یکپارچه، دینامیک زمانی را با استفاده از سرگردانی تصادفی گراف دو جهته برای شبیهسازی وابستگیهای فضایی ثبت میکنند.
-
STGCN [ 10 ]: یک چارچوب یادگیری عمیق برای پیشبینی ترافیک از پیچیدگی نمودار و پیچیدگی زمانی دروازهدار یکبعدی برای گرفتن همبستگی مکانی و همبستگی زمانی استفاده میکند.
-
GraphWaveNet (Wu et al., 2019) [ 11 ]: GraphWaveNet کانولوشن گراف تطبیقی را با پیچیدگی گاه به گاه گسترده ترکیب می کند تا به طور خودکار وابستگی های فضایی پنهان را ضبط کند.
-
STSGCN [ 29 ]: مدلی که مستقیماً همبستگیهای مکانی-زمانی محلی را با استفاده از چندین ماژول زیرگراف محلی و در عین حال ناهمگونی دادههای مکانی را به طور همزمان ضبط میکند.
-
LSGCN [ 37 ]: شبکه کانولوشن گراف کوتاه مدت (LSGCN)، که از بلوکهای کانولوشنال دردار فضایی با مکانیزم توجه برای ثبت ویژگیهای مکانی-زمانی استفاده میکند.
5.3. تنظیمات پارامتر آزمایشی
ما به ASTGCN [ 13 ] و STSGCN [ 29 ] اشاره می کنیم]، و تمام مجموعه های داده به آموزش، اعتبار سنجی و مجموعه های آزمایشی در نسبت 6:2:2 تجزیه می شوند. به طور خاص، کل مدت زمان مجموعه داده PEMS04 59 روز، با 16992 مرحله زمانی است. بنابراین، 10195 مرحله زمانی اول به عنوان مجموعه آموزشی، 3398 مرحله زمانی به عنوان مجموعه اعتبار سنجی و 3398 گام زمانی به عنوان مجموعه آزمون استفاده می شود. کل مدت زمان مجموعه داده PEMS08 62 روز است که 17856 مرحله زمانی وجود دارد. 10714 مرحله زمانی اول به عنوان مجموعه آموزشی، 3572 مرحله زمانی به عنوان مجموعه اعتبار سنجی و 3572 مرحله زمانی به عنوان مجموعه آزمون استفاده می شود. علاوه بر این، نمونههای دادههای هر بخش جاده را با معادله زیر (17) نرمال میکنیم و دادههای نرمالشده را در مدل وارد میکنیم، که با تمایز خودکار حالت معکوس و Adam [ 50 ] بهینه شده است.].
ایکس”=ایکس-مترهآn(ایکس)ستید(ایکس)،
5.4. نتایج تجربی و تحلیل مقایسه ای
-
RQ1: عملکرد STSGAN برای پیشبینی ترافیک کلی در مقایسه با خطوط پایه مختلف چگونه است؟
-
RQ2: چگونه ماژول های فرعی مختلف برای بهبود عملکرد مدل طراحی شده اند؟
-
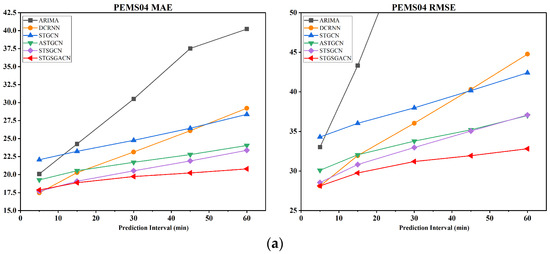
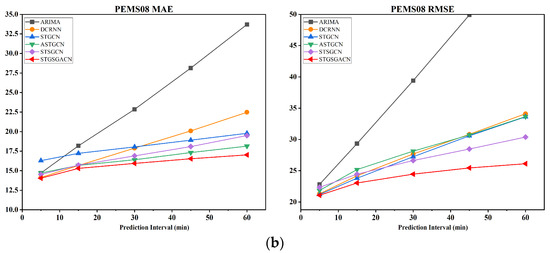
RQ3: عملکرد ماژول های طراحی شده در مشکلات پیش بینی بلند مدت چگونه است؟
-
RQ4: تنظیمات پارامتر مدل چگونه بر نتایج تجربی تأثیر می گذارد؟
5.5. آزمایشات فرسایشی
-
T: ماژول پیچیدگی علی زمانی برای پیشبینی جریان ترافیک آینده با استفاده از جریان ترافیک تاریخی به عنوان ورودی استفاده شد.
-
T+G: از T به عنوان ماژول پایه استفاده کرد و یک شبکه عصبی کانولوشن گراف (GCN) را برای گرفتن همبستگی های فضایی محلی و جهانی اضافه کرد. این بررسی می کند که آیا زمانی که GCN همبستگی های فضایی دوربرد را ثبت می کند، هموارسازی بیش از حد اتفاق می افتد یا خیر.
-
T+A+G: شبکه عصبی کانولوشنال توجه گراف را برای گرفتن همبستگی های فضایی دوربرد معرفی کنید.
-
T+S+G: به طور مشترک یک ماتریس مجاورت معنایی جهانی برای گرفتن ویژگیهای فضایی با چشمانداز جهانی. در مقایسه با فقدان مکانیسم خود توجه گراف.
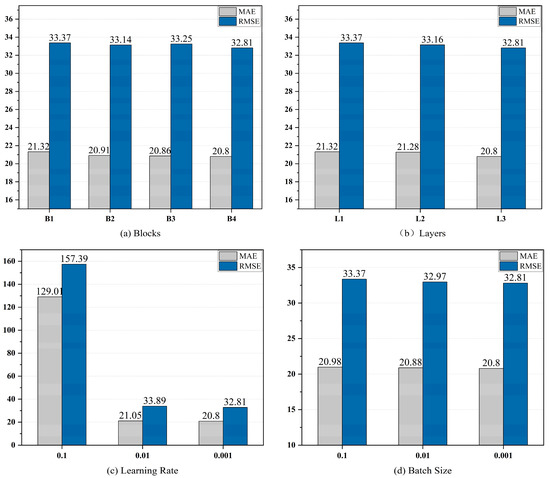
5.6. تأثیر پیکربندی شبکه
6. نتیجه گیری و کار آینده
منابع
- ژانگ، جی. وانگ، FY; وانگ، ک. لین، WH; خو، X. چن، سی. سیستم های حمل و نقل هوشمند مبتنی بر داده: یک نظرسنجی. IEEE Trans. هوشمند ترانسپ سیستم 2011 ، 12 ، 1624-1639. [ Google Scholar ] [ CrossRef ]
- ژانگ، ایکس. هوانگ، سی. خو، ی. Xia، L. شبکههای توجه نمودار کانولوشنال مکانی-زمانی برای پیشبینی جریان ترافیک در سطح شهر. در مجموعه مقالات بیست و نهمین کنفرانس بین المللی ACM در مدیریت اطلاعات و دانش، مجازی، 19 اکتبر 2020؛ صفحات 1853-1862. [ Google Scholar ]
- Lv، M. هنگ، ز. چن، ال. زو، تی. جی، اس. شبکه کانولوشن چند گرافی زمانی برای پیشبینی جریان ترافیک. IEEE Trans. هوشمند ترانسپ سیستم 2020 ، 22 ، 3337-3348. [ Google Scholar ] [ CrossRef ]
- دو، بی. هو، ایکس. سان، ال. لیو، جی. کیائو، ی. Lv، W. پیشبینی تقاضای ترافیک بر اساس شبکه عصبی کانولوشنال انتقال پویا. IEEE Trans. هوشمند ترانسپ سیستم 2020 ، 22 ، 1237-1247. [ Google Scholar ] [ CrossRef ]
- وانگ، سی. زو، ی. زنگ، تی. لیو، اچ. Yu, J. مدلسازی روابط بین ایستگاهی با شبکه کانولوشنال نمودار زمانی برای پیشبینی کیفیت هوا. در مجموعه مقالات چهاردهمین کنفرانس بین المللی ACM در جستجوی وب و داده کاوی، مجازی، 8 تا 12 مارس 2021؛ صص 616-634. [ Google Scholar ]
- ژانگ، ایکس. هوانگ، سی. خو، ی. شیا، ال. دای، پی. بو، ال. ژنگ، ی. پیشبینی جریان ترافیک با شبکه انتشار نمودار مکانی-زمانی. در مجموعه مقالات کنفرانس AAAI در مورد هوش مصنوعی، مجازی، 2 تا 9 فوریه 2021؛ جلد 35، ص 15008–15015. [ Google Scholar ]
- لین، ز. فنگ، جی. لو، ز. لی، ی. Jin, D. Deepstn+: شبکه عصبی مکانی-زمانی آگاه از زمینه برای پیشبینی جریان جمعیت در کلان شهرها. در مجموعه مقالات کنفرانس AAAI در مورد هوش مصنوعی، هونولولو، HI، ایالات متحده، 27 ژانویه تا 1 فوریه 2019؛ جلد 33، ص 1020–1027. [ Google Scholar ]
- وو، زی. پان، اس. چن، اف. لانگ، جی. ژانگ، سی. Philip, SY یک بررسی جامع در مورد شبکه های عصبی گراف. IEEE Trans. شبکه عصبی فرا گرفتن. سیستم 2020 ، 32 ، 4-24. [ Google Scholar ] [ CrossRef ] [ PubMed ][ نسخه سبز ]
- یان، اس. Xiong، Y. لین، دی. شبکههای کانولوشنال نمودار زمانی فضایی برای تشخیص عمل مبتنی بر اسکلت. در مجموعه مقالات سی و دومین کنفرانس AAAI در مورد هوش مصنوعی، نیواورلئان، لس آنجلس، ایالات متحده آمریکا، 2 تا 7 فوریه 2018. [ Google Scholar ]
- یو، بی. یین، اچ. Zhu, Z. شبکههای کانولوشنال نمودار فضایی-زمانی: یک چارچوب یادگیری عمیق برای پیشبینی ترافیک. arXiv 2017 , arXiv:1709.04875. [ Google Scholar ]
- وو، زی. پان، اس. لانگ، جی. جیانگ، جی. ژانگ، سی. موج موج گراف برای مدلسازی نمودار عمیق مکانی-زمانی. arXiv 2019 ، arXiv:1906.00121. [ Google Scholar ]
- گوا، اس. لین، ی. فنگ، ن. آهنگ، سی. وان، اچ. شبکههای کانولوشنال نمودار مکانی-زمانی مبتنی بر توجه برای پیشبینی جریان ترافیک. در مجموعه مقالات کنفرانس AAAI در مورد هوش مصنوعی، هونولولو، HI، ایالات متحده آمریکا، 27 ژانویه 2019؛ جلد 33، ص 922–929. [ Google Scholar ]
- ژائو، ز. چن، دبلیو. وو، ایکس. چن، کامپیوتر; شبکه لیو، جی. LSTM: یک رویکرد یادگیری عمیق برای پیش بینی ترافیک کوتاه مدت. IET Intel. ترانسپ سیستم 2017 ، 11 ، 68-75. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- ژائو، ال. آهنگ، ی. ژانگ، سی. لیو، ی. وانگ، پی. لین، تی. Li، H. T-gcn: یک شبکه کانولوشن گراف زمانی برای پیشبینی ترافیک. IEEE Trans. هوشمند ترانسپ سیستم 2019 ، 21 ، 3848–3858. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- ژو، جی. کوی، جی. هو، اس. ژانگ، ز. یانگ، سی. لیو، ز. Sun، M. گراف شبکه های عصبی: بررسی روش ها و کاربردها. AI Open 2020 ، 1 ، 57–81. [ Google Scholar ] [ CrossRef ]
- لی، کیو. هان، ز. بینش Wu، XM Deeper در مورد شبکه های کانولوشن گراف برای یادگیری نیمه نظارت شده. در مجموعه مقالات سی و دومین کنفرانس AAAI در مورد هوش مصنوعی، نیواورلئان، لس آنجلس، ایالات متحده آمریکا، 2 تا 7 فوریه 2018. [ Google Scholar ]
- آلون، یو. Yahav, E. در مورد گلوگاه شبکه های عصبی گراف و مفاهیم عملی آن. arXiv 2020 ، arXiv:2006.05205. [ Google Scholar ]
- پاسکانو، آر. میکولوف، تی. Bengio، Y. در مورد دشواری آموزش شبکه های عصبی بازگشتی. در مجموعه مقالات کنفرانس بین المللی یادگیری ماشین، PMLR، آتلانتا، GA، ایالات متحده آمریکا، 17-19 ژوئن 2013. ص 1310–1318. [ Google Scholar ]
- بنژیو، ی. سیمرد، پ. فراسکونی، پی. یادگیری وابستگی های طولانی مدت با نزول گرادیان دشوار است. IEEE Trans. شبکه عصبی 1994 ، 5 ، 157-166. [ Google Scholar ] [ CrossRef ] [ PubMed ]
- روی، ا. روی، KK; احسن علی، ع. امین، م. رحمان، AKM SST-GNN: مدل پیش بینی ترافیک فضایی-زمانی ساده شده با استفاده از شبکه عصبی نمودار. در مجموعه مقالات کنفرانس اقیانوس آرام-آسیا در مورد کشف دانش و داده کاوی، مجازی، 11-14 مه 2021؛ Springer: Cham، سوئیس، 2021; صص 90-102. [ Google Scholar ]
- لی، ی. یو، آر. شهابی، ج. لیو، ی. شبکه عصبی تکراری کانولوشنال انتشار: پیشبینی ترافیک مبتنی بر داده. arXiv 2017 , arXiv:1707.01926. [ Google Scholar ]
- Giorgino, T. محاسبه و تجسم ترازهای تاب خوردگی زمانی پویا در R: بسته dtw. J. Stat. نرم افزار 2009 ، 31 ، 1-24. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- ویلیامز، بی.ام. Hoel، LA مدلسازی و پیش بینی جریان ترافیک وسایل نقلیه به عنوان یک فرآیند ARIMA فصلی: مبنای نظری و نتایج تجربی. J. Transp. مهندس 2003 ، 129 ، 664-672. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- لو، ز. ژو، سی. وو، جی. جیانگ، اچ. Cui, S. ادغام علیت گرنجر و رگرسیون خودکار برداری برای پیشبینی ترافیک شبکههای WLAN در مقیاس بزرگ. KSII Trans. اینترنت Inf. سیستم (TIIS) 2016 ، 10 ، 136-151. [ Google Scholar ]
- ون لینت، JWC; ون هینسبرگن، سی. مدلهای پیشبینی ترافیک کوتاهمدت و زمان سفر. آرتیف. هوشمند Appl. کریت ترانسپ شماره های 2012 ، 22 ، 22-41. [ Google Scholar ]
- ما، ایکس. دای، ز. او، ز. ما، جی. وانگ، ی. Wang, Y. یادگیری ترافیک به عنوان تصاویر: یک شبکه عصبی پیچیده عمیق برای پیش بینی سرعت شبکه حمل و نقل در مقیاس بزرگ. Sensors 2017 , 17 , 818. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- یائو، اچ. تانگ، ایکس. وی، اچ. ژنگ، جی. لی، زی. بازبینی شباهت مکانی-زمانی: یک چارچوب یادگیری عمیق برای پیشبینی ترافیک. در مجموعه مقالات کنفرانس AAAI در مورد هوش مصنوعی، هونولولو، HI، ایالات متحده، 27 ژانویه تا 1 فوریه 2019؛ جلد 33، ص 5668–5675. [ Google Scholar ]
- گوا، اس. لین، ی. لی، اس. چن، ز. Wan, H. شبکههای عصبی کانولوشنال سه بعدی فضایی-زمانی عمیق برای پیشبینی دادههای ترافیک. IEEE Trans. هوشمند ترانسپ سیستم 2019 ، 20 ، 3913–3926. [ Google Scholar ] [ CrossRef ]
- آهنگ، سی. لین، ی. گوا، اس. وان، اچ. شبکه های کانولوشن گراف همزمان مکانی-زمانی: چارچوبی جدید برای پیش بینی داده های شبکه مکانی-زمانی. در مجموعه مقالات کنفرانس AAAI در مورد هوش مصنوعی، نیویورک، نیویورک، ایالات متحده آمریکا، 7 تا 12 فوریه 2020؛ جلد 34، ص 914–921. [ Google Scholar ]
- کنگ، ایکس. ژانگ، جی. وی، ایکس. زینگ، دبلیو. Lu, W. شبکه های توجه گراف مکانی-زمانی تطبیقی برای پیش بینی جریان ترافیک. Appl. هوشمند 2022 ، 52 ، 4300-4316. [ Google Scholar ] [ CrossRef ]
- برونا، جی. زارمبا، دبلیو. اسلم، آ. LeCun، Y. شبکه های طیفی و شبکه های متصل به صورت محلی روی نمودارها. arXiv 2013 , arXiv:1312.6203. [ Google Scholar ]
- هوانگ، ی. بی، اچ. لی، ز. مائو، تی. وانگ، زی استگات: مدلسازی تعاملات مکانی-زمانی برای پیشبینی مسیر انسان. در مجموعه مقالات کنفرانس بین المللی IEEE/CVF در بینایی کامپیوتر، سئول، کره، 27 اکتبر تا 2 نوامبر 2019؛ ص 6272-6281. [ Google Scholar ]
- ژانگ، ایکس. خو، ی. Shao, Y. پیشبینی جریان ترافیک با شبکههای توجه نمودار کانولوشنال مکانی-زمانی. محاسبات عصبی Appl. 2022 ، 1-23. [ Google Scholar ] [ CrossRef ]
- ولیچکوویچ، پ. کوکورول، جی. کازانووا، آ. رومرو، آ. لیو، پی. Bengio، Y. گراف شبکه های توجه. arXiv 2017 , arXiv:1710.10903. [ Google Scholar ]
- ژنگ، سی. فن، ایکس. وانگ، سی. Qi، J. Gman: یک گراف شبکه چندتوجهی برای پیشبینی ترافیک. در مجموعه مقالات کنفرانس AAAI در مورد هوش مصنوعی، نیویورک، نیویورک، ایالات متحده آمریکا، 7 تا 12 فوریه 2020؛ جلد 34، ص 1234–1241. [ Google Scholar ]
- چن، دبلیو. چن، ال. زی، ی. کائو، دبلیو. گائو، ی. Feng, X. شبکه کانولوشن گراف دو جزئی توجه چند بردی برای پیش بینی ترافیک. در مجموعه مقالات کنفرانس AAAI در مورد هوش مصنوعی، نیویورک، نیویورک، ایالات متحده آمریکا، 7 تا 12 فوریه 2020؛ جلد 34، ص 3529–3536. [ Google Scholar ]
- هوانگ، آر. هوانگ، سی. لیو، ی. دای، جی. Kong, W. LSGCN: پیشبینی کوتاهمدت ترافیک با شبکههای کانولوشن گراف. در مجموعه مقالات بیست و نهمین کنفرانس مشترک بین المللی هوش مصنوعی، یوکوهاما، ژاپن، 7 تا 15 ژانویه 2020؛ صص 2355–2361. [ Google Scholar ]
- یانگ، اس. لی، اچ. لو، ی. لی، جی. آهنگ، ی. Zhou، T. شبکه نمودار همجوشی تطبیقی فضایی و زمانی برای پیش بینی جریان ترافیک کوتاه مدت. ریاضیات 2022 ، 10 ، 1594. [ Google Scholar ] [ CrossRef ]
- او، ک. ژانگ، ایکس. رن، اس. Sun, J. یادگیری باقیمانده عمیق برای تشخیص تصویر. در مجموعه مقالات کنفرانس IEEE در مورد دید کامپیوتری و تشخیص الگو، لاس وگاس، NV، ایالات متحده، 27-30 ژوئن 2016. صص 770-778. [ Google Scholar ]
- Ba، JL; کیروس، جی آر. نرمال سازی لایه هینتون، جنرال الکتریک. arXiv 2016 , arXiv:1607.06450. [ Google Scholar ]
- Berndt، دی جی; کلیفورد، جی. استفاده از تاب خوردگی زمانی پویا برای یافتن الگوها در سری های زمانی. در مجموعه مقالات کارگاه آموزشی KDD، سیاتل، WA، ایالات متحده آمریکا، 30-31 ژوئیه 1994; جلد 10، ص 359–370. [ Google Scholar ]
- گیلمر، جی. Schoenholz، SS; رایلی، پی اف. وینیالز، او. ارسال پیام عصبی دال، جنرال الکتریک برای شیمی کوانتومی. در مجموعه مقالات کنفرانس بین المللی یادگیری ماشین، PMLR، سیدنی، استرالیا، 6 تا 11 اوت 2017؛ صص 1263-1272. [ Google Scholar ]
- واسوانی، ع. Shazeer, N. پارمار، ن. Uszkoreit، J. جونز، ال. گومز، AN; Polosukhin، I. توجه شما تمام چیزی است که نیاز دارید. Adv. عصبی Inf. روند. سیستم 2017 30 . _ [ Google Scholar ]
- بای، اس. Kolter، JZ; کلتون، وی. ارزیابی تجربی شبکههای کانولوشنال و تکراری عمومی برای مدلسازی توالی. arXiv 2018 , arXiv:1803.01271. [ Google Scholar ]
- لیا، سی. ویدال، آر. رایتر، آ. شبکههای کانولوشنال موقت Hager، GD: رویکردی یکپارچه برای تقسیمبندی اقدام. در مجموعه مقالات کنفرانس اروپایی بینایی کامپیوتر، آمستردام، هلند، 8 تا 16 اکتبر 2016. Springer: Cham, Switzerland, 2016; ص 47-54. [ Google Scholar ]
- لانگ، جی. شلهامر، ای. دارل، تی. شبکه های کاملاً پیچیده برای تقسیم بندی معنایی. در مجموعه مقالات کنفرانس IEEE در مورد بینایی کامپیوتری و تشخیص الگو، بوستون، MA، ایالات متحده آمریکا، 7 تا 12 ژوئن 2015. صص 3431–3440. [ Google Scholar ]
- گوا، جی. Zhang, T. معماری مکانی-زمانی باقیمانده برای پیشبینی تقاضای سفر. ترانسپ Res. قسمت C Emerg. تکنولوژی 2020 , 115 , 102639. [ Google Scholar ] [ CrossRef ]
- ژانگ، جی. ژنگ، ی. Qi، D. شبکههای باقیمانده مکانی-زمانی عمیق برای پیشبینی جریانهای جمعیتی در سطح شهر. در مجموعه مقالات سی و یکمین کنفرانس AAAI در مورد هوش مصنوعی، سانفرانسیسکو، کالیفرنیا، ایالات متحده آمریکا، 4 تا 10 فوریه 2017. [ Google Scholar ]
- سوتسکور، آی. وینیالز، او. Le، QV توالی برای یادگیری توالی با شبکه های عصبی. Adv. عصبی Inf. روند. سیستم 2014 ، 27 . [ Google Scholar ]
- Kingma، DP; با، جی. آدام: روشی برای بهینه سازی تصادفی. ICLR. 2015. arXiv 2015 , arXiv:1412.6980. [ Google Scholar ]



بدون دیدگاه