

بازسازی چیدمان سه بعدی چند ضلعی یک محیط داخلی از طریق تقسیم بندی اتاق مبتنی بر Voxel و پارتیشن فضایی
چکیده
1. مقدمه
2. آثار مرتبط
3. روش ها
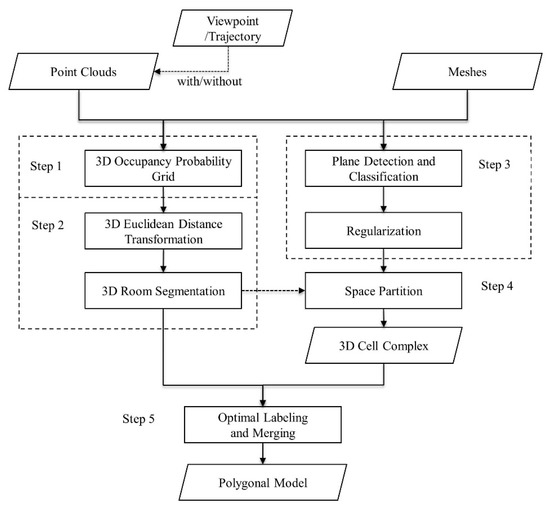
3.1. بررسی اجمالی
3.2. شبکه احتمال اشغال سه بعدی
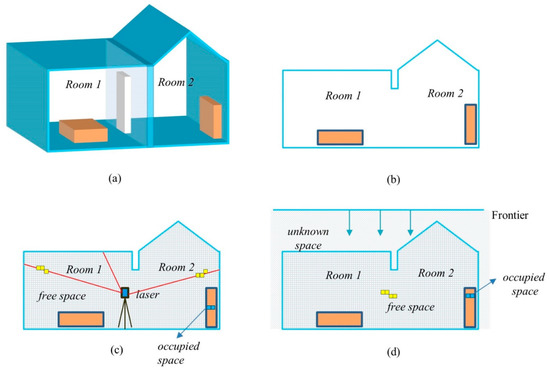
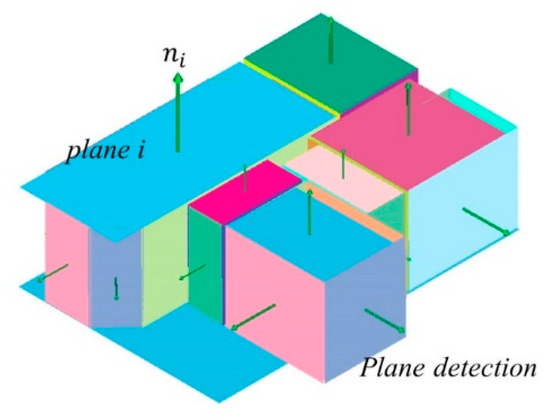
دو نوع ابر نقطه سه بعدی به عنوان ورودی استفاده می شود. یکی ابر نقطه ای است که توسط TLS گرفته شده است، پ={vτ،پτ}τ=1ن. هر فریم از ابر نقطه اسکن شده با یک دیدگاه مرتبط است vτ. سیستم مختصات جهان برای تعیین استفاده می شود {ایکسمن،yمن،zمن}مختصات نقطه پمن∈پτ. نوع دیگر ابر نقطه ای است که توسط MLS گرفته شده است. پ={پمن،φمن}من=1. هر نقطه اسکن شده با اطلاعات پوز مرتبط است. همانطور که در شکل 2c نشان داده شده است، جعبه مرزی به شبکه های m × n × h گسسته شده است و الگوریتم خط سه بعدی برزنهام (الگوریتم 1) برای محاسبه احتمال اشغال سه بعدی وکسل ها در شبکه استفاده می شود [ 25 ]. مقدار وکسل p با یکی از سه علامت مشخص می شود سپ={frهه=0،oججتوپمنهد=1،توnکnown=-1}. یک نقشه شبکه احتمال اشغال سه بعدی برای نشان دادن اطمینانی که یک وکسل توسط موانع اشغال شده است ایجاد می شود. مقدار احتمال در ساختار داده شبکه سه بعدی بر اساس VDB [ 32 ] ذخیره می شود که یک ساختار داده حجم کارآمد و کم است.
| الگوریتم 1 . محاسبه احتمال اشغال سه بعدی برای یک ابر نقطه. |
| ورودی: |
| پτ//کلود نقطه ورودی |
| vمن//نظر |
| ببمآایکس، ببممنn//جعبه مرزی ابر نقطه |
| مقدار دهی اولیه: |
| مoجج←∅;// شبکه احتمال اشغال سه بعدی |
| (1) برای هر ( پمن∈پτ) |
| (2) //محاسبه مختصات وکسل های اشغال شده و آزاد در شبکه |
| (3) bresenham_in_3D( vمن،پمن،مoجج) |
| (4) پایان برای |
| (5) بازگشت مoجج; |
سنسورهایی مانند دوربین های تک چشمی و حسگرهای RGB-D اکنون به طور گسترده برای بازسازی داخلی استفاده می شوند. خروجی اغلب یک شبکه سطحی است که می تواند هدف تجسم را برآورده کند. مجموعه داده های مش بدون ساختار هستند و حاوی اطلاعات معنایی نیستند. از آنجایی که این دستگاهها اغلب ارزانتر از LiDAR هستند، بازسازی طرحبندی سهبعدی ساختمانها از این مجموعه دادهها مهم است. هندسه چند نمای و الگوریتم بازسازی چند نمایه در فرآیند بازسازی استفاده می شود و اطلاعات پوز در استریو چند نمای (MVS) برای به دست آوردن مش جهت دار استفاده می شود. از آنجایی که اطلاعات دیدگاه در فرآیند بازسازی متراکم ترکیب می شود، اطلاعات دیدگاه را نمی توان مستقیماً در یک مدل مش برای محاسبه احتمال اشغال استفاده کرد. محیط های داخلی و خارجی را می توان با استفاده از اطلاعات عادی مثلث ها تشخیص داد. مقدار وکسل p با یکی از سه علامت مشخص می شود سپ={frهه=0،oججتوپمنهد=1،توnکnown=-1}. الگوریتم شامل سه مرحله اصلی است (الگوریتم 2). ابتدا، تمام وکسل های شبکه با مقادیر آزاد مقداردهی اولیه می شوند. دوم، وکسل واقع در مثلث با یک مقدار اشغال شده مشخص می شود. بردار نرمال به 26 جهت منظم طبقه بندی می شود و مقدار جهت کدگذاری شده وکسل از 1 تا 26 متغیر است (مقدار جهت اولیه 0 است). سوم، یک الگوریتم جبهه موج 26 وکسل مجاور اطراف وکسل فعلی را بررسی می کند و جهت وکسل فعلی را به روز می کند. اگر جهت 26 وکسل مجاور به سمت وکسل فعلی باشد، مقدار جهت وکسل فعلی پس از رشد جبهه موج روی 27 تنظیم می شود. اگر مقدار جهت یک وکسل برابر با صفر باشد، وکسل مربوطه در شبکه احتمال اشغال روی ناشناخته تنظیم می شود. . اگر مقدار جهت یک وکسل بزرگتر از صفر باشد،
| الگوریتم 2 . محاسبه احتمال اشغال سه بعدی برای یک مش گرا. |
| ورودی: |
| پمترهسساعت(پ،تی);// مش با جهت عادی |
| ببمآایکس، ببممنn;//جعبه مرزی ابر نقطه |
| مقدار دهی اولیه: |
| مoجج←∅;//شبکه احتمال اشغال سه بعدی |
| مکارگردان←∅;// شبکه جهت D-26 |
| (1) برای هر ( تیمن∈تی) |
| (2) جعبه = getBoundingBox( تیمن)//محاسبه مختصات نقاط اشغال شده و آزاد در نقشه متریک |
| (3) برای i = minx:maxx |
| (4) برای j = miny:maxy |
| (5) برای k = minz:maxz |
| (6) سپ= voxel(i,j,k); |
| (7) اگر ( سپ.داخل( تیمن)) |
| (8) مoجج.setValue( سپ255)؛ |
| (9) N = getNormal( تیمن) |
| (10) D = normalTo26Directoin(N); |
| (11) مکارگردان.تنظیم( سپ، د)؛ |
| (12) پایان اگر |
| (13) پایان برای |
| (14) پایان برای |
| (15) پایان برای |
| (16) پایان برای |
| (17) مکارگردان= جبهه موج( مکارگردان) |
| (18) مoجج= به روز رسانی ناشناس( مoجج،مکارگردان) |
| (19) بازگشت مoجج; |
اولین قدم این است که شبکه احتمال اشغال را مقداردهی کنید و مقدار هر وکسل را آزاد تنظیم کنید. سپس وکسل واقع در مثلث با مقدار اشغال شده مشخص می شود. مرحله آخر ناحیه ناشناخته را مشخص می کند. ابتدا مرز (حداکثر مقدار محدوده ارتفاع ابر نقطه) را مقداردهی اولیه می کنیم، هر وکسل را ناشناخته قرار می دهیم و طبق جهت محور z لایه به لایه وکسل را طی می کنیم ( شکل 2 d). هنگامی که مقدار وکسل لایه فعلی در شبکه اشغال شده با لایه قبلی یکسان باشد، این مقدار به عنوان ناشناخته علامت گذاری می شود و اگر مقدار وکسل لایه فعلی با لایه قبلی متفاوت باشد، پیمایش متوقف می شود. در نهایت، تمام مناطق ناشناخته علامت گذاری می شوند. شبکه احتمال اشغال بازگشتی شامل سپ={frهه=0،oججتوپمنهد=1،توnکnown=-1}سه مقدار
| الگوریتم 3. محاسبه احتمال اشغال سه بعدی برای یک مش کلی. |
| ورودی: |
| پمترهسساعت(پ،تی)// مش کلی |
| ببمآایکس، ببممنn// جعبه مرزی مش |
| مقدار دهی اولیه: |
| مoجج←∅;// شبکه احتمال اشغال سه بعدی |
| (1) setValue( مoجج،رایگان)؛ |
| (2) برای هر ( تیمن∈تی) |
| (3) جعبه = getBoundingBox( تیمن)// محاسبه مختصات نقاط اشغال شده و آزاد در نقشه متریک |
| (4) برای i = minx:maxx |
| (5) برای j = miny:maxy |
| (6) برای k = minz:maxz |
| (7) سپ= voxel(i,j,k); |
| (8) اگر ( سپ.inside(ti)) |
| (9) مoجج.setValue( سپ، مشغول)؛ |
| (10) پایان اگر |
| (11) پایان برای |
| (12) پایان برای |
| (13) پایان برای |
| (14) پایان برای |
| (15) به روز رسانی ناشناخته( مoجج) |
| (16) بازگشت مoجج; |
3.3. تقسیم بندی اتاق سه بعدی
3.4. تشخیص و طبقه بندی هواپیما
3.5. منظم سازی
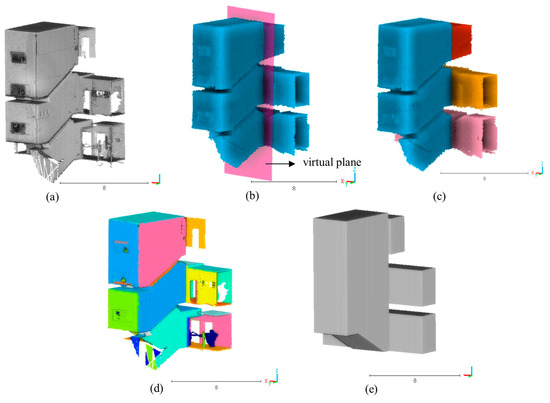
3.6. پارتیشن فضایی
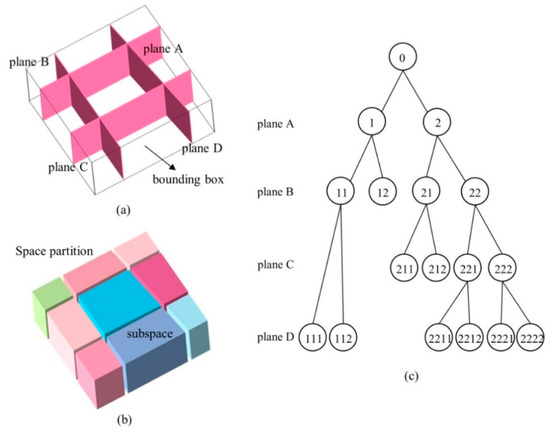
در این مرحله، مجموعه ای از صفحات را به عنوان ورودی می گیریم و پارتیشنی از فضای سه بعدی محدود را برمی گردانیم. هدف از پارتیشن فضایی تولید مجتمع سلولی است و ما یک پیاده سازی نسبتا ساده را اتخاذ می کنیم. این روش از ساختار داده مش چند ضلعی استفاده می کند [ 36] برای ذخیره فضای تقسیم شده. هواپیماهای شناسایی شده برای هر اتاق بر اساس نتایج تقسیم بندی اتاق طبقه بندی می شوند. پارتیشن بندی فضا در هر اتاق انجام می شود. یک پارتیشن فضای دودویی (BSP) برای حفظ رابطه سلسله مراتبی فضای تقسیم شده استفاده می شود. مش چند ضلعی گروهی از رئوس، لبه ها و وجوه است که نحوه شکل گیری یک جسم چند وجهی را تعیین می کند. یک شبکه چند ضلعی یک ساختار داده نیمه لبه است که به طور پیوسته در جهت خلاف جهت عقربه های ساعت در اطراف هر وجه و در امتداد هر مرز قرار گرفته است. توپولوژی 2 منیفولد در نظر گرفته می شود. ایده اصلی پارتیشن بندی فضای دودویی این است که هر صفحه ای می تواند فضا را به دو نیمه فضا تقسیم کند. برای یک فضای سه بعدی یا زیرفضاهای محدود، تمام نقاط یک طرف صفحه تقسیم نیم فضا و نقاط سمت دیگر صفحه تقسیم نیم فضای دیگر را تعریف می کنند. اگر به تعریف صفحه در هر نیم فضا ادامه دهیم، نیم فضا را بیشتر به دو فضای فرعی کوچکتر تقسیم می کنیم. با ادامه این فرآیند، زیرفضا به تدریج کوچکتر می شود و در نهایت یک درخت دوتایی فضایی تشکیل می شود. هر زیرفضا یک چندوجهی محدب می سازد. رابطه هندسی توپولوژیکی بین چند وجهی های مختلف را می توان به طور موثر با جستجوی درخت BSP بیان کرد.شکل 6 ). الگوریتم پارتیشن فضا در الگوریتم 4 مشخص شده است.
| الگوریتم 4. پارتیشن فضایی. |
| ورودی: |
| اسپلآnه//صفحه های ورودی |
| ببمآایکس، ببممنn// جعبه مرزی سه بعدی ابر نقطه |
| مقدار دهی اولیه: |
| Polygon _mesh vol;//a polygon mesh |
| BSP_tree bsp; |
| (1) vol = buildBounding3DSpace( ببمآایکس، ببممنn) |
| (2) bsp.AddNode(vol); |
| (3) برای هر ( سمن∈اسپلآnه) |
| (4) vol_tmp = bsp.getBeginNode(); |
| (5) while (vol_tmp) |
| (6) [vol1,vol2] = clip( سمن،جلد_tmp) |
| (7) bsp.update(vol_tmp, vol1,vol2); |
| (8) vol_tmp = bsp.getNextNode(); |
| (9) پایان در حالی که |
| (10) bsp.getBeginNode(); |
| (11) پایان برای |
| (12) بازگشت bsp; |
3.7. برچسبگذاری و ادغام بهینه
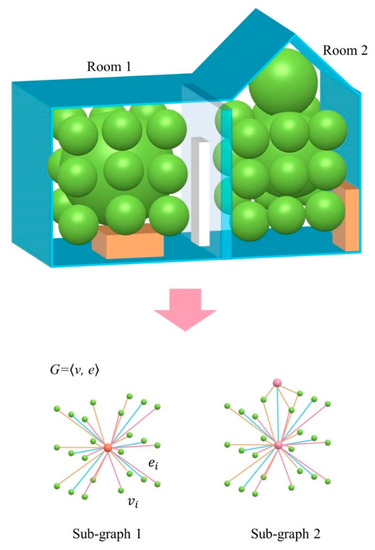
پس از پارتیشن بندی فضا، فضای سه بعدی به مجموعه ای از سلول های چند وجهی تقسیم می شود. سلول های چند وجهی با برچسب یکسان در یک اتاق در نظر گرفته می شوند. یک نمودار بدون جهت جی=<v،ه>برای رمزگذاری مجموعه سلول های چند وجهی به مجموعه برچسب L. Node تعریف شده است vنشان دهنده سلول چند وجهی در مجموعه سلولی و لبه است هنشان دهنده رابطه توپولوژیکی بین سلول ها است. همسایگان گره v در N ذخیره می شوند. تابع انرژی برای مسئله برچسب گذاری به صورت زیر تعریف می شود:
انرژی واحد برای توصیف احتمال تعلق چند وجهی به یک برچسب طراحی شده است. مقدار به عنوان نسبت حجم وکسل های اشغال شده با برچسب l i به حجم چند وجهی تقسیم شده محاسبه می شود. اینکه آیا یک وکسل در داخل یک چند وجهی قرار دارد یا خیر، با استفاده از عملکرد شبکه چند ضلعی آزمایش می شود.
انرژی جفتی احتمال وجود دو سلول چند وجهی در یک اتاق را توصیف می کند. به عنوان نسبت بین وکسل های اشغال شده توسط وصله دیوار اصلی و وکسل ها در وجه پیچیده سلولی تعریف می شود. رابطه ضعیف تر بین دو سلول چند وجهی با احتمال بالاتر بین آنها نشان داده می شود. دیواری که دو سلول را از هم جدا می کند نشان می دهد که بعید است آنها در یک اتاق باشند.
4. نتایج
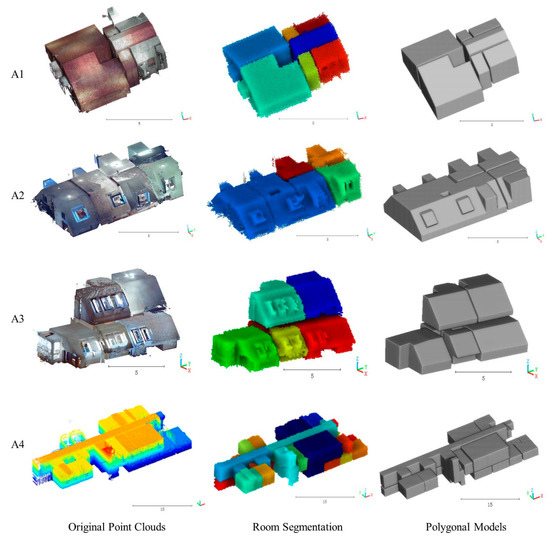
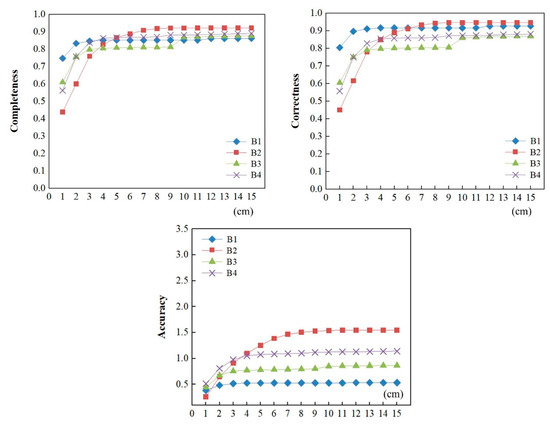
زبان برنامه ++C است. کتابخانه الگوریتمهای هندسه محاسباتی (CGAL) [ 38 ] و مقایسه ابری [ 39 ] در پیادهسازی الگوریتم استفاده میشوند. تمام آزمایشات با پردازنده Intel Core i7-10750H (2.60 هرتز) و 16 گیگابایت رم انجام می شود. روش ارزیابی کمی برای ارزیابی نتایج بازسازی استفاده می شود [ 40 ، 41 ]. با مقایسه مدل مرجع R با مدل چند ضلعی بازسازی S به نام مدل منبع، کامل بودن، صحت و دقت به صورت کمی ارزیابی می شود. تعریف کامل بودن این است:
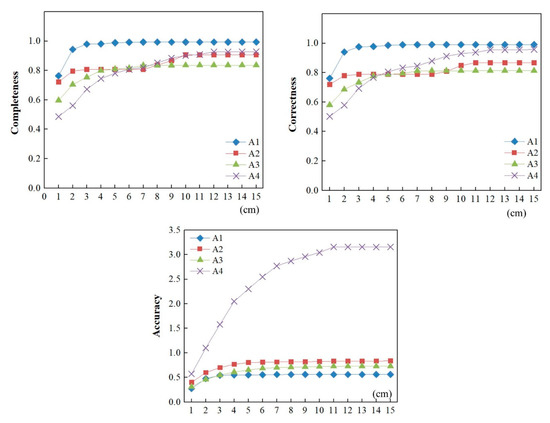
در میان آنها، مساحت تقاطع در تمام وجوه بین محاسبه می شود اسمنو آرj، و کامل بودن با اندازه بافر b تغییر می کند. تعریف صحت این است:
دقت به صورت زیر تعریف می شود:
جایی که “πjتیپمن”فاصله عمودی بین راس است پمندر مدل منبع و صفحه π در مدل مرجع و r آستانه برش برای جلوگیری از تأثیر یک مدل منبع ناقص یا نادرست است. نمرات کامل بودن نسبتاً بالا و صحت پایین به این معنی است که مدل های بازسازی شده حاوی اکثر عناصر موجود در مدل های مرجع مربوطه هستند اما تعداد قابل توجهی از جنبه های نادرست را نیز شامل می شوند.
4.1. Point Cloud Datasets
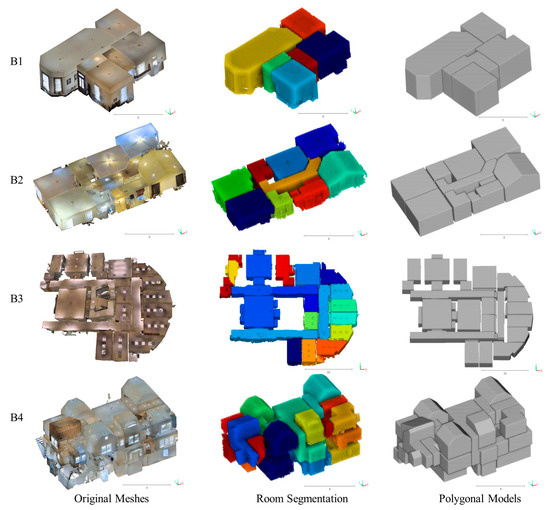
4.2. مجموعه داده های مش
4.3. فضاهای متقابل
5. بحث
6. نتیجه گیری
منابع
- بسیر، م. Vergauwen، M. بازسازی توپولوژی اشیاء دیوار BIM از داده های ابر نقطه ای. Remote Sens. 2020 , 12 , 1800. [ Google Scholar ] [ CrossRef ]
- لی، اچ. بازسازی و چیدمان صحنه داخلی سه بعدی بر اساس فناوری واقعیت مجازی و یادگیری چند شات. محاسبه کنید. هوشمند نوروسک. 2022 ، 2022 ، 4134086. [ Google Scholar ] [ CrossRef ]
- نیکوهمت، س. Diakité، AA; لهتولا، وی. زلاتانوا، اس. Vosselman, G. دستور زبان سازگاری برای بررسی مدل سه بعدی داخلی. ترانس. GIS 2021 ، 25 ، 189-212. [ Google Scholar ] [ CrossRef ]
- کلاینر، ا. باراواله، آر. کولینگ، ا. پیلوتی، پی. مونیخ، M. راه حلی برای پوشش اتاق به اتاق برای ربات های تمیز کننده خودمختار. در مجموعه مقالات کنفرانس بین المللی IEEE/RSJ در مورد ربات ها و سیستم های هوشمند (IROS)، ونکوور، BC، کانادا، 24 تا 28 سپتامبر 2017. [ Google Scholar ]
- کانگ، ز. یانگ، جی. یانگ، ز. چنگ، اس. مروری بر تکنیکهای بازسازی سهبعدی محیطهای داخلی. ISPRS Int. J. Geo-Inf. 2020 ، 9 ، 330. [ Google Scholar ] [ CrossRef ]
- زلاتانوا، اس. Isikdag، U. مدل های سه بعدی داخلی و کاربردهای آنها. در دایره المعارف GIS ; Shekhar, S., Xiong, H., Zhou, X., Eds. انتشارات بین المللی اسپرینگر: چم، سوئیس، 2017; ص 9-20. [ Google Scholar ]
- نیش، اچ. لافارژ، اف. پان، سی. Huang, H. Floorplan نسل از ابرهای نقطه سه بعدی: رویکرد پارتیشن بندی فضا. ISPRS J. Photogramm. Remote Sens. 2021 ، 175 ، 44-55. [ Google Scholar ] [ CrossRef ]
- چن، ک. لای، ی.-ک. هو، اس.-م. مدل سازی صحنه داخلی سه بعدی از داده های RGB-D: یک نظرسنجی محاسبه کنید. Vis. رسانه 2015 ، 1 ، 267-278. [ Google Scholar ] [ CrossRef ]
- لیم، جی. Doh, N. بازسازی خودکار فضاهای داخلی چند سطحی از نقطه ابر و مسیر. Sensors 2021 , 21 , 3493. [ Google Scholar ] [ CrossRef ]
- کلوری، ر. شوچوک، جی آر. O’Brien، JF بازسازی سطح طیفی از ابرهای نقطه پر سر و صدا. در مجموعه مقالات پردازش هندسه (Eurographics/ACM SIGGRAPH)، نیس، فرانسه، 8 ژوئیه 2004; صص 11-21. [ Google Scholar ]
- کژدان، م. بولیتو، ام. Hoppe, H. Poisson سطح بازسازی. در مجموعه مقالات چهارمین سمپوزیوم یوروگرافیک در مورد پردازش هندسه، کالیاری، ساردینیا، ایتالیا، 26 ژوئن 2006; صص 61-70. [ Google Scholar ]
- پارک، اس.-جی. هونگ، ک.-اس. بازیابی یک چیدمان سه بعدی داخلی با تقسیم بندی معنایی بالا به پایین از یک تصویر واحد. تشخیص الگو Lett. 2015 ، 68 ، 70-75. [ Google Scholar ] [ CrossRef ]
- چنشی، ال. شوینگ، AG; کندو، ک. اورتاسون، ر. Fidler, S. Rent3D: مقدمات پلان طبقه برای تخمین چیدمان تک چشمی. در مجموعه مقالات کنفرانس IEEE 2015 در مورد بینایی کامپیوتری و تشخیص الگو (CVPR)، بوستون، MA، ایالات متحده آمریکا، 7 تا 12 ژوئن 2015؛ صص 3413–3421. [ Google Scholar ]
- زو، سی. کولبرن، ا. شان، Q. Hoiem, D. LayoutNet: بازسازی چیدمان اتاق سه بعدی از یک تصویر RGB. در مجموعه مقالات کنفرانس IEEE/CVF 2018 در مورد دید رایانه و تشخیص الگو، سالت لیک سیتی، UT، ایالات متحده آمریکا، 18 تا 23 ژوئن 2018؛ صفحات 2051–2059. [ Google Scholar ]
- چانگ، آ. دای، ا. فانک هاسر، تی. هالبر، ام. نیبنر، ام. ساوا، م. آهنگ ها.؛ زنگ، ا. Zhang، Y. Matterport3D: یادگیری از دادههای RGB-D در محیطهای داخلی. در مجموعه مقالات کنفرانس بین المللی 2017 در 3D Vision (3DV)، چینگدائو، چین، 10-12 اکتبر 2017؛ صص 667-676. [ Google Scholar ]
- مورا، سی. ماتاوش، او. ویلانووا، ای جی; گوبتی، ای. Pajarola, R. تشخیص و بازسازی خودکار اتاق در محیط های داخلی درهم و برهم با چیدمان اتاق های پیچیده. محاسبه کنید. نمودار 2014 ، 44 ، 20-32. [ Google Scholar ] [ CrossRef ]
- ارمنی، من. سنر، او. ضمیر، ع. جیانگ، اچ. بریلاکیس، آی. فیشر، ام. Savarese, S. تجزیه معنایی سه بعدی فضاهای داخلی در مقیاس بزرگ. در مجموعه مقالات کنفرانس IEEE 2016 در مورد بینایی کامپیوتری و تشخیص الگو (CVPR)، لاس وگاس، NV، ایالات متحده آمریکا، 27 تا 30 ژوئن 2016؛ صص 1534-1543. [ Google Scholar ]
- لوپرتو، ام. آمیگونی، ف. بازسازی و پیشبینی چیدمان محیطهای داخلی از روی نقشههای متریک دو بعدی. مهندس Appl. آرتیف. هوشمند 2022 ، 113 ، 104910. [ Google Scholar ] [ CrossRef ]
- اوچمن، اس. ووک، آر. Klein, R. بازسازی خودکار مدل های ساختمانی سه بعدی کاملاً حجمی از ابرهای نقطه جهت دار. ISPRS J. Photogramm. Remote Sens. 2019 , 151 , 251–262. [ Google Scholar ] [ CrossRef ]
- خوشلحم، ک. Díaz-Vilariño، L. مدلسازی سه بعدی فضاهای داخلی: یادگیری زبان معماری داخلی. ISPRS -Int. قوس. فتوگرام حسگر از راه دور اسپات. Inf. علمی 2014 ، XL-5 ، 321-326. [ Google Scholar ] [ CrossRef ]
- بکر، اس. پیتر، م. Fritsch, D. بازسازی 3 بعدی داخلی با پشتیبانی از گرامر از ابرهای نقطه ای برای BIM “As-Built”. ISPRS Ann. فتوگرام حسگر از راه دور اسپات. Inf. علمی 2015 ، II-3/W4 ، 17-24. [ Google Scholar ] [ CrossRef ]
- ایکهاتا، اس. یانگ، اچ. Furukawa، Y. مدل سازی ساختار داخلی. در مجموعه مقالات کنفرانس بین المللی IEEE 2015 در بینایی کامپیوتر (ICCV)، واشنگتن، دی سی، ایالات متحده آمریکا، 7 تا 13 دسامبر 2015. ص 1323–1331. [ Google Scholar ]
- مورالی، س. ویژه، پ. اسوالد، ام آر. Pollefeys, M. Indoor Scan2BIM: مدل های اطلاعاتی ساختمان از فضای داخلی خانه. در مجموعه مقالات کنفرانس بین المللی IEEE/RSJ 2017 در مورد ربات ها و سیستم های هوشمند (IROS)، ونکوور، BC، کانادا، 24-28 سپتامبر 2017؛ صص 6126–6133. [ Google Scholar ]
- کای، ی. فن، L. یک رویکرد کارآمد برای ساخت خودکار هندسه سه بعدی آب بندی ساختمان ها با استفاده از ابرهای نقطه ای. Remote Sens. 2021 , 13 , 1947. [ Google Scholar ] [ CrossRef ]
- یانگ، اف. ژو، جی. سو، اف. زو، ایکس. تانگ، ال. لیانگ، ی. زو، اچ. Li, L. بازسازی خودکار فضای داخلی از ابرهای نقطه ای در محیط های چند اتاق با دیوارهای منحنی. Sensors 2019 , 19 , 3798. [ Google Scholar ] [ CrossRef ]
- مورا، سی. ماتاوش، او. پاجارولا، آر. محاسبه کنید. نمودار انجمن 2016 ، 35 ، 179-188. [ Google Scholar ] [ CrossRef ]
- آمبروس، آر. کلائیسی، اس. Wendt، A. تقسیمبندی خودکار اتاق از دادههای سه بعدی بدون ساختار محیطهای داخلی. ربات IEEE. خودکار Lett. 2017 ، 2 ، 749-756. [ Google Scholar ] [ CrossRef ]
- کوی، ی. لی، کیو. یانگ، بی. شیائو، دبلیو. چن، سی. Dong, Z. بازسازی خودکار سه بعدی محیط داخلی با ابرهای نقطه اسکن لیزری سیار. IEEE J. Sel. بالا. Appl. زمین Obs. Remote Sens. 2019 , 12 , 3117–3130. [ Google Scholar ] [ CrossRef ]
- نیکوهمت، س. Diakité، AA; زلاتانوا، اس. Vosselman, G. بازسازی سه بعدی داخلی از ابرهای نقطه ای برای مسیریابی بهینه در ساختمان های پیچیده برای پشتیبانی از مدیریت بلایا. خودکار ساخت و ساز 2020 , 113 , 103109. [ Google Scholar ] [ CrossRef ]
- اوسائو، اس. لافارژ، اف. Alliez, P. بازسازی صحنه داخلی با استفاده از استخراج اولیه حساس به ویژگی و برش نمودار. ISPRS J. Photogramm. Remote Sens. 2014 ، 90 ، 68-82. [ Google Scholar ] [ CrossRef ]
- اوچمن، اس. ووک، آر. وسل، آر. Klein, R. بازسازی خودکار مدل های ساختمانی پارامتریک از ابرهای نقطه داخلی. محاسبه کنید. نمودار 2016 ، 54 ، 94-103. [ Google Scholar ] [ CrossRef ]
- Museth، K. VDB: حجم های پراکنده با وضوح بالا با توپولوژی پویا. ACM Trans. نمودار 2013 ، 32 ، 1-22. [ Google Scholar ] [ CrossRef ]
- یانگ، اف. چه، م. زو، ایکس. لی، ال. ژانگ، جی. ژانگ، سی. نمایش حجمی و بسته بندی کره فضای داخلی برای تقسیم بندی اتاق سه بعدی. ISPRS Int. J. Geo-Inf. 2021 ، 10 ، 739. [ Google Scholar ] [ CrossRef ]
- لین، ی. لی، جی. وانگ، سی. چن، ز. وانگ، ز. Li, J. اتصال سریع هواپیما با نظم محدود. ISPRS J. Photogramm. Remote Sens. 2020 , 161 , 208–217. [ Google Scholar ] [ CrossRef ]
- اوسائو، اس. لافارژ، اف. Alliez، P. تشخیص شکل مسطح و منظم سازی در پشت سر هم. محاسبه کنید. نمودار انجمن 2015 ، 35 ، 203-215. [ Google Scholar ] [ CrossRef ]
- بوچ، ام. کوبلت، ال. پالی، ام. آلیز، پی. Lévy، B. پردازش مش چند ضلعی ; CRC Press: Boca Raton، FL، USA، 2010. [ Google Scholar ]
- بویکوف، ی. وکسلر، او. ذبیح، ر. به حداقل رساندن انرژی تقریبی سریع از طریق برش های نمودار. IEEE Trans. الگوی مقعدی ماخ هوشمند 2001 ، 23 ، 1222-1239. [ Google Scholar ] [ CrossRef ]
- CGAL، کتابخانه الگوریتمهای هندسه محاسباتی. 2022. در دسترس آنلاین: https://www.cgal.org (در 1 مه 2022 قابل دسترسی است).
- مقایسه ابری پروژه متن باز نرم افزار 3D Point Cloud و Mesh Processing. 2022. در دسترس آنلاین: https://www.cloudcompare.org/ (در 1 مه 2022 قابل دسترسی است).
- خوشلحم، ک. تران، اچ. آچاریا، دی. ویلارینو، LD; کانگ، ز. Dalyot, S. نتایج معیار ISPRS در مدلسازی داخلی. ISPRS Open J. Photogramm. Remote Sens. 2021 , 2 , 100008. [ Google Scholar ] [ CrossRef ]
- تران، اچ. خوشلحم، ک. کیلی، الف. مقایسه هندسی و ارزیابی کیفیت مدلهای سه بعدی محیطهای داخلی. ISPRS J. Photogramm. Remote Sens. 2019 ، 149 ، 29–39. [ Google Scholar ] [ CrossRef ]
- خوشلحم، ک. ویلارینو، LD; پیتر، م. کانگ، ز. آچاریا، دی. معیار ISPRS در مدلسازی داخلی. ISPRS-Int. قوس. فتوگرام حسگر از راه دور اسپات. Inf. علمی 2017 ، XLII-2/W7 ، 367–372. [ Google Scholar ] [ CrossRef ]


بدون دیدگاه