

کلید واژه ها:
برنامه ریزی فضایی سرزمینی ; مرز رشد شهری (UGB) ; تغییر شکل فضایی ؛ اتوماتای سلولی ; ارزیابی سودمندی
1. مقدمه
2. روش شناسی
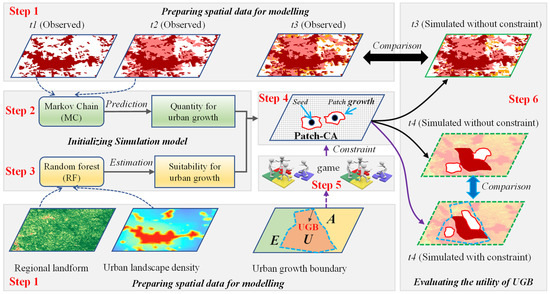
2.1. چارچوب رویه مدلسازی
2.2. مدل شبیه سازی رشد شهری محدود (CUGSM)
2.2.1. چارچوب اساسی CA
CA بدون شک مدل اصلی برای شبیه سازی رشد شهری است. تاکنون، اگرچه راههای مختلفی برای مدلسازی وجود دارد، یک چارچوب مدل پایه CA عمدتاً شامل بخشهای زیر است: (1) یک ماژول کمیت برای تعیین زمان توقف فرآیند شبیهسازی، که معمولاً توسط زنجیره مارکوف و همچنین برخی دیگر پیشبینی میشود. روش هایی که می تواند تقاضای اجتماعی و اقتصادی انسان ها را تحلیل کند. (2) یک ماژول فضایی برای کشف احتمال اولیه رشد شهری بر روی سلول ها، که معمولا با انواع روش های داده کاوی مانند رگرسیون لجستیک، جنگل تصادفی و برخی الگوریتم های دیگر تخمین زده می شود. (3) یک ماژول تکراری برای تعیین محل تبدیل سلولها به زمین شهری، که معمولاً تعامل محلهای را در نظر میگیرد و وضعیت آن را با توجه به احتمال یکپارچه بهروزرسانی میکند.
جایی که پمنjتینشان دهنده احتمال رشد شهری یکپارچه است که با استفاده از تناسب رشد شهری محاسبه می شود اسمنj، تعامل محله ای Ωمنjتیو شرایط توسعه ممنوع Ψمنjبا تابع ادغام f; اسمنjاز رشد تاریخی شهری با استفاده از روش جنگل تصادفی (RF) برآورد شده است. Ωمنjتییک متغیر پویا است که با استفاده از یک پنجره متحرک مانند مور و غیره محاسبه می شود. Ψمنjمعمولاً توسط مناطق حفاظت شده اکولوژیکی یا اساسی زمین کشاورزی تعریف می شود. Uمنjتیوضعیت سلول است منj(من=1،2،⋯،من;j=1،2،⋯،جی); چه سلول منjامکان تبدیل به زمین شهری با احتمال تلفیقی آن تعیین می شود پمنjتیو کمیت زمین شهری جدید اضافه شده ستیپیش بینی شده با روش MC. gتابعی است که برای تعیین زمان توقف تکرار CA استفاده می شود.
2.2.2. استراتژی مبتنی بر رشد وصله برای بهروزرسانی CA (Patch-CA)
در اکثر تحقیقات قبلی، اینکه آیا سلولها در CA میتوانند شهری شوند یا خیر، با یک مقدار آستانه تعیین میشود. این بدان معنی است که اگر احتمال رشد شهری یکپارچه ( پمنjتی) بزرگتر از مقدار آستانه ( پتیساعتد، سپس وضعیت سلول منjبه زمین شهری تبدیل می شود. شکی نیست که این مکانیسم به روز رسانی در تئوری علمی است، اما در کاربرد عملی با چالش های بزرگی مواجه خواهد شد. در واقع رشد شهری به جز طرح و طرح، سلول به سلول توسعه نمی یابد. وقتی اندازه سلول CA کوچکتر باشد، به عنوان مثال، از 100 متر × 100 متر تا 10 متر × 10 متر، اثر جداسازی آشکارتر خواهد بود. پس از شناخت محدودیت CA کلاسیک، محققان استراتژی رشد پچ را پیشنهاد کردند [ 45 ، 46 ]. مهمترین مرحله برای رشد وصله، انتخاب دانه ها و تعریف الگوی رشد پچ است. اینکه کدام سلول می تواند به عنوان بذر انتخاب شود عمدتاً توسط احتمال رشد شهری تعیین می شود ( پمنjتی). معمولاً با استفاده از استراتژی رولت انتخاب می شود. الگوی رشد وصله را می توان از رشد شهری تاریخی با یک پنجره مناسب مانند 1000 متر × 1000 متر استخراج کرد. استراتژی بهروزرسانی مبتنی بر رشد وصله، گسترش seed-centred است، که بسیار شبیه به استفاده از مهر کلون در فتوشاپ است. بنابراین، مرحله به روز رسانی در فرمول (1) را می توان به صورت زیر اصلاح کرد:
جایی که ساعتیک تابع استراتژی رولت برای تعیین اینکه کدام سلول را می توان به عنوان دانه با توجه به احتمال رشد شهری یکپارچه انتخاب کرد ( پمنjتی) میک کتابخانه الگو است که از رشد شهری تاریخی توسط یک پنجره مناسب جمع آوری شده است w.
2.2.3. اعمال محدودیت های فضایی UGB در Patch-CA
ماهیت مدل شبیهسازی رشد شهری محدود، در نظر گرفتن مدیریت فضایی UGB برای رشد شهری آینده است. اگرچه UGB فقط یک خط برنامه ریزی است، فضای شهری عمدتاً در UGB قرار دارد. کشاورزی و فضای زیست محیطی عمدتاً خارج از UGB هستند. از این رو، هنگام اعمال محدودیت های فضایی UGB به Patch-CA، ویژگی های مدیریت فضایی باید در نظر گرفته شود. به منظور تطبیق بهتر ویژگیهای احتمال مدل Patch-CA، ما از مقدار کمی از 0 تا 1 برای نشان دادن انواع مختلف نیازهای توسعه استفاده کردیم. به طور کلی، فضای شهری که در مناطق توسعه متمرکز (CDZ) قرار دارد برای رشد شهری قابل توجه است، میتوانیم آن را به عنوان 1 علامت گذاری کنیم. منطقه توسعه انعطافپذیر (FDZ) نیز در UGB قرار دارد، اما هدف آن مقابله با عدم قطعیت است. توسعه بنابراین، می توانیم آن را به عنوان مقدار متوسط 0.5 علامت گذاری کنیم که نه تشویق می شود و نه محدود می شود. فضای کشاورزی خارج از UGB معمولاً فقط پروژه های زیرساختی بزرگ را مجاز می کند در حالی که فضای زیست محیطی معمولاً برای هیچ ساختمانی مجاز نیست، بنابراین می توانیم آن را به عنوان 0.3 علامت گذاری کنیم (این یک مقدار تجربی است که برای کنترل احتمال تجاوز به زمین های کشاورزی استفاده می شود. در اصل، این مقدار است. بزرگتر از 0 اما باید کمتر از 0.5) و 0 باشد. در مرحله بعد، ما از یک مدل بازی مبتنی بر احتمال تصادفی استفاده کردیم تا تأثیر UGB را در Patch-CA ترکیب کنیم، و انتخاب دانه به صورت فرمول (3) نشان داده شده است: بنابراین می توانیم آن را به ترتیب 0.3 (مقدار تجربی است که برای کنترل احتمال تجاوز به زمین کشاورزی استفاده می شود. در اصل بزرگتر از 0 است اما باید کمتر از 0.5 باشد) و 0 علامت گذاری کنیم. در مرحله بعد، ما از یک مدل بازی مبتنی بر احتمال تصادفی استفاده کردیم تا تأثیر UGB را در Patch-CA ترکیب کنیم، و انتخاب دانه به صورت فرمول (3) نشان داده شده است: بنابراین می توانیم آن را به ترتیب 0.3 (مقدار تجربی است که برای کنترل احتمال تجاوز به زمین کشاورزی استفاده می شود. در اصل بزرگتر از 0 است اما باید کمتر از 0.5 باشد) و 0 علامت گذاری کنیم. در مرحله بعد، ما از یک مدل بازی مبتنی بر احتمال تصادفی استفاده کردیم تا تأثیر UGB را در Patch-CA ترکیب کنیم، و انتخاب دانه به صورت فرمول (3) نشان داده شده است:
جایی که پمنjتیاحتمال رشد شهری یکپارچه است، اگر کوچکتر از λمنj; سپس، این سلول را می توان به عنوان دانه انتخاب کرد. در غیر این صورت، مدل Patch-CA باید به سلول بعدی منتقل شود.
3. منطقه مورد مطالعه و مواد داده
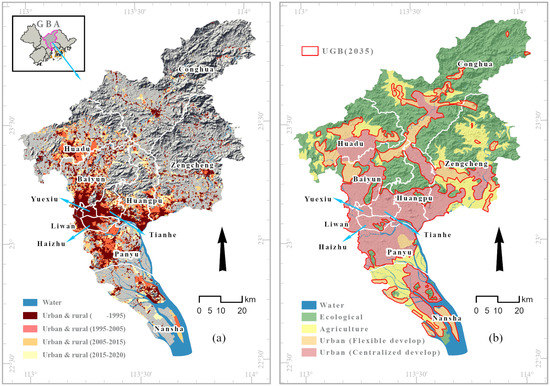
3.1. منطقه مطالعه
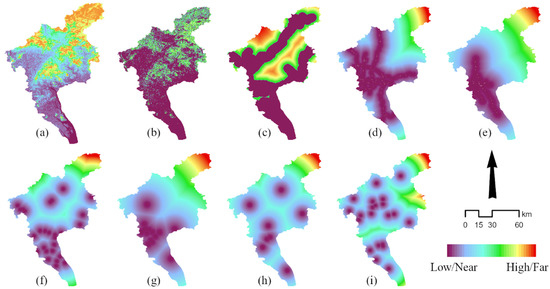
3.2. مواد داده
4. نتایج
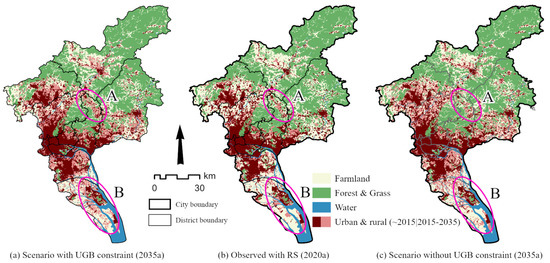
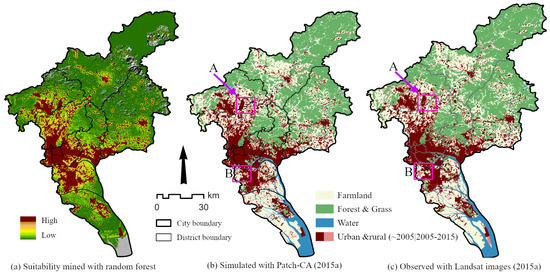
4.1. الگوی سناریوهای رشد شهری آینده
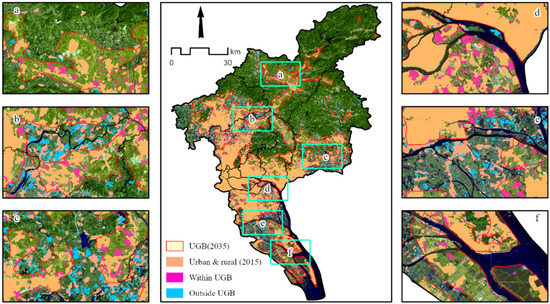
4.2. کاربرد UGB برای تغییر شکل رشد شهری آینده
5. بحث
6. نتیجه گیری
منابع
- لیو، ایکس. در آغوش گرفتن.؛ چن، ی. لی، ایکس. خو، X. لی، اس. پی، اف. Wang, S. نقشه برداری چند زمانی با وضوح بالا از زمین شهری جهانی با استفاده از تصاویر Landsat بر اساس پلت فرم موتور Google Earth. سنسور از راه دور محیط. 2018 ، 209 ، 227-239. [ Google Scholar ] [ CrossRef ]
- فرشتگان.؛ پدر و مادر، ج. سیوکو، دی ال. بلی، ا. پوتر، دی. ابعاد گسترش شهری جهانی: برآوردها و پیش بینی ها برای همه کشورها، 2000-2050. Prog. طرح. 2011 ، 75 ، 53-107. [ Google Scholar ] [ CrossRef ]
- چن، جی. لی، ایکس. لیو، ایکس. چن، ی. لیانگ، ایکس. لنگ، جی. خو، X. لیائو، دبلیو. کیو، YA; وو، کیو. و همکاران پیشبینیهای جهانی گسترش زمین شهری آینده تحت مسیرهای اجتماعی-اقتصادی مشترک نات. اشتراک. 2020 ، 11 ، 537. [ Google Scholar ] [ CrossRef ] [ PubMed ]
- Seto، KC; گونرالپ، بی. Hutyra، LR پیشبینیهای جهانی گسترش شهری تا سال 2030 و تأثیرات مستقیم بر تنوع زیستی و استخرهای کربن. Proc. Natl. آکادمی علمی ایالات متحده آمریکا 2012 ، 109 ، 16083-16088. [ Google Scholar ] [ CrossRef ]
- فولمن، ا. ویلکوم، ام. Dannenberg، P. با رشد شهر، کشاورزان چه می کنند؟ بررسی سیستماتیک کشاورزی شهری و حومه شهری تحت رشد سریع شهری در سراسر جنوب جهانی Landsc. طرح شهری. 2021 ، 215 ، 104186. [ Google Scholar ] [ CrossRef ]
- زو، ز. او، Q. ارزیابی فضایی-زمانی گسترش تراکم شهری در میانه رود یانگ تسه و تأثیر آن بر اراضی اکولوژیکی. علمی کل محیط. 2021 ، 790 ، 148150. [ Google Scholar ]
- هوانگ، ال. کائو، دبلیو. خو، X. فن، جی. وانگ، جی. پیوند مزایای خدمات اکوسیستم به برنامه ریزی فضایی پایدار استراتژی های حفاظت از محیط زیست. جی. محیط زیست. مدیریت 2018 ، 222 ، 385-395. [ Google Scholar ] [ CrossRef ]
- استیانو، ال. Sans، GHC; بالداسینی، پ. گالگو، اف. تکسیرا، MA پارولو، JM به کار انداختن ایده خدمات اکوسیستم: کاربردها در ارزیابی تأثیر و برنامه ریزی سرزمینی. محیط زیست توسعه دهنده 2020 , 38 , 100570. [ Google Scholar ] [ CrossRef ]
- ابوت، سی. مارگهایم، جی. تصور مرز رشد شهری پورتلند: مقررات برنامه ریزی به عنوان نماد فرهنگی. مربا. طرح. دانشیار 2008 ، 74 ، 196-208. [ Google Scholar ] [ CrossRef ]
- لانگ، ی. هان، اچ. لای، اس.-ک. مائو، Q. مرزهای رشد شهری منطقه شهری پکن: مقایسه شبیه سازی و آثار هنری. شهرها 2013 ، 31 ، 337-348. [ Google Scholar ] [ CrossRef ]
- لیانگ، ایکس. لیو، ایکس. لی، ایکس. چن، ی. تیان، اچ. Yao, Y. تعیین مرزهای رشد شهری چند سناریویی با مدل FLUS مبتنی بر CA و روش مورفولوژیکی. Landsc. طرح شهری. 2018 ، 177 ، 47-63. [ Google Scholar ] [ CrossRef ]
- لیو، جی. ژانگ، جی. ژوانگ، ز. چنگ، کیو. گائو، ی. چن، تی. هوانگ، Q. خو، ال. چن، دی. دیدگاه جدیدی برای تعیین مرزهای توسعه شهری بر اساس مدل SLEUTH-InVEST. Habitat Int. 2017 ، 70 ، 13-23. [ Google Scholar ] [ CrossRef ]
- ما، س. لی، ایکس. Cai, Y. تعیین مرزهای رشد شهری با مدل بهینهسازی کلونی مورچهها. محاسبه کنید. محیط زیست سیستم شهری 2017 ، 62 ، 146-155. [ Google Scholar ] [ CrossRef ]
- ژانگ، دی. لیو، ایکس. لین، ز. ژانگ، ایکس. ژانگ، اچ. تعیین مرزهای رشد شهری در مناطق محیط زیست محیطی پیچیده با استفاده از اتوماتای سلولی و ارزیابی محیطی دوگانه. جی. پاک. تولید 2020 , 256 , 120361. [ Google Scholar ] [ CrossRef ]
- دی مایر، آ. استرلا، آر. جکسسن، پی. دکرز، جی. ون رومپی، آ. ون اورشوون، جی. چارچوب مفهومی و اجرای نرم افزار آن برای تولید سیستم های پشتیبانی تصمیم گیری فضایی برای برنامه ریزی کاربری زمین. سیاست کاربری زمین 2013 ، 35 ، 271-282. [ Google Scholar ] [ CrossRef ]
- ملکی، ج. معصومی، ز. حکیم پور، ف. Coello، CAC یک سیستم پشتیبانی برنامه ریزی کاربری فضایی بر اساس نظریه بازی ها. خطمشی استفاده از زمین 2020 ، 99 ، 105013. [ Google Scholar ] [ CrossRef ]
- لیو، جی. لی، جی. Nie, P. پیگیری تاریخچه گسترش شهری در گوانگژو (چین) در طول سالهای 1665-2017: شواهدی از نقشههای تاریخی و تصاویر سنجش از دور. خط مشی استفاده از زمین 2021 ، 112 ، 105773. [ Google Scholar ] [ CrossRef ]
- ابوراس، م.م. هو، YM; رملی، م.ف. Ash Aari، ZH شبیهسازی و پیشبینی روند رشد شهری فضایی-زمانی با استفاده از مدلهای اتوماتای سلولی: یک بررسی. بین المللی J. Appl. زمین Obs. Geoinf. 2016 ، 52 ، 380-389. [ Google Scholar ] [ CrossRef ]
- شفیع زاده مقدم، ح. بهبود دقت فضایی مدل های شبیه سازی رشد شهری با استفاده از رویکردهای پیش بینی مجموعه. محاسبه کنید. محیط زیست سیستم شهری 2019 ، 76 ، 91-100. [ Google Scholar ] [ CrossRef ]
- وانگ، اچ. گوا، جی. ژانگ، بی. Zeng, H. شبیه سازی رشد زمین شهری با ترکیب اطلاعات تاریخی در یک مدل اتوماتای سلولی. Landsc. طرح شهری. 2021 ، 214 ، 104168. [ Google Scholar ] [ CrossRef ]
- دنگ، ی. لیو، ی. فو، ب. شبیهسازی رشد شهری که توسط محدودیتهای اکولوژیکی در شهر پکن هدایت میشود: روشها و مفاهیم برای برنامهریزی فضایی. جی. محیط زیست. مدیریت 2019 ، 243 ، 402-410. [ Google Scholar ]
- دومینگو، دی. پالکا، جی. هرسپرگر، AM اثر طرحهای منطقهبندی بر تغییر کاربری زمین شهری: شبیهسازی چند سناریویی برای حمایت از رشد شهری پایدار. حفظ کنید. جامعه شهرها 2021 ، 69 ، 102833. [ Google Scholar ] [ CrossRef ]
- ژانگ، ی. شیا، سی. لیو، ی. لو، ی. وانگ، ی. لیو، ی. شبیهسازی گسترش شهری تحت محدودیت خدمات اکوسیستم متعدد (MESs) بر اساس اتوماتای سلولی (CA) – مدل مارکوف: تحلیل سناریو و پیامدهای سیاست. خط مشی استفاده از زمین 2021 ، 108 ، 105667. [ Google Scholar ] [ CrossRef ]
- قوش، پ. موخوپادحیای، ع. چاندا، ا. موندال، پی. آخند، ع. موکرجی، اس. نایاک، SK; قوش، س. میترا، دی. قوش، ت. و همکاران کاربرد اتوماتای سلولی و مدل زنجیره مارکوف در مدلسازی محیطی جغرافیایی – مروری. Remote Sens. Appl. Soc. محیط زیست 2017 ، 5 ، 64-77. [ Google Scholar ] [ CrossRef ]
- وانگ، آر. مورایاما، ی. موریموتو، تی. مطالعات شبیهسازی سناریو توسعه شهری با استفاده از سنجش از دور و GIS: مرور. Remote Sens. Appl. Soc. محیط زیست 2021 ، 22 ، 100474. [ Google Scholar ] [ CrossRef ]
- سانته، آی. گارسیا، AM; میراندا، دی. Crecente، R. مدلهای اتوماتای سلولی برای شبیهسازی فرآیندهای شهری دنیای واقعی: بررسی و تحلیل. Landsc. طرح شهری. 2010 ، 96 ، 108-122. [ Google Scholar ] [ CrossRef ]
- باتی، ام. زمین شبیه سازی و مدل سازی شهری. در دایره المعارف بین المللی جغرافیای انسانی ، ویرایش دوم. کوبایاشی، ا.، ویرایش. الزویر: آمستردام، هلند، 2020؛ صص 119-125. [ Google Scholar ]
- لی، کیو. فنگ، ی. تانگ، ایکس. ژو، ی. وو، پی. زی، اچ. جین، ی. چن، پی. لیو، اس. Xv، X. و همکاران اتوماتای سلولی مبتنی بر الگوریتم کرم شب تاب برای بازتولید رشد شهری و پیشبینی سناریوهای آینده. حفظ کنید. جامعه شهرها 2022 ، 76 ، 103444. [ Google Scholar ] [ CrossRef ]
- اوکواشی، او. Ndehedehe، CE یکپارچه سازی یادگیری ماشین با زنجیره مارکوف و مدل های اتوماتای سلولی برای مدل سازی تغییر کاربری زمین شهری. Remote Sens. Appl. Soc. محیط زیست 2020 ، 21 ، 100461. [ Google Scholar ] [ CrossRef ]
- شفیع زاده مقدم، ح. مینایی، م. پونتیوس، آر جی، جونیور؛ اصغری، ع. داداش پور، ح. ادغام الگوریتم انتخاب ویژگی رو به جلو، جنگل تصادفی و اتوماتای سلولی برای برون یابی رشد شهری در منطقه تهران-کرج ایران. محاسبه کنید. محیط زیست سیستم شهری 2021 ، 87 ، 101595. [ Google Scholar ] [ CrossRef ]
- An, L. مدل سازی تصمیمات انسانی در سیستم های انسانی و طبیعی همراه: بررسی مدل های مبتنی بر عامل. Ecol. مدل. 2012 ، 229 ، 25-36. [ Google Scholar ] [ CrossRef ]
- Agyemang، FSK; سیلوا، ای. شبیهسازی رشد شهری یک شهر-منطقه عمدتاً غیررسمی غنا با مدل اتوماتای سلولی: پیامدهایی برای برنامهریزی و سیاست شهری. Appl. Geogr. 2019 ، 105 ، 15-24. [ Google Scholar ] [ CrossRef ]
- گوزمان، لس آنجلس؛ اسکوبار، اف. پنیا، جی. Cardona، R. یک مدل استفاده از زمین مبتنی بر اتوماتای سلولی به عنوان یک سیستم پشتیبانی تصمیم گیری فضایی یکپارچه برای برنامه ریزی شهری در شهرهای در حال توسعه: مورد منطقه بوگوتا. خطمشی استفاده از زمین 2019 ، 92 ، 104445. [ Google Scholar ] [ CrossRef ]
- گوناریدیس، دی. کوریانوپولوس، آی. کوکولاس، اس. بررسی روندهای رشد شهری آیندهنگر تحت چشماندازهای مختلف اقتصادی و سناریوهای برنامهریزی کاربری زمین: مورد آتن. Appl. Geogr. 2018 ، 90 ، 134-144. [ Google Scholar ] [ CrossRef ]
- ژو، ال. دانگ، ایکس. سان، س. وانگ، اس. شبیهسازی چند سناریویی تغییر زمین شهری در شانگهای با جنگل تصادفی و مدل CA-Markov. حفظ کنید. جامعه شهرها 2020 , 55 , 102045. [ Google Scholar ] [ CrossRef ]
- لیائو، جی. شائو، جی. وانگ، سی. تانگ، ال. هوانگ، Q. Qiu، Q. شبیهسازی سناریوی پراکندگی شهری مبتنی بر اتوماتای سلولی و محدودیتهای اکولوژیکی میانگین وزنی منظم. Ecol. اندیک. 2019 ، 107 ، 105572. [ Google Scholar ] [ CrossRef ]
- ژانگ، ی. لیو، ی. وانگ، ی. لیو، دی. شیا، سی. وانگ، ز. وانگ، اچ. لیو، ی. شبیه سازی گسترش شهری به سمت توسعه کم کربن: مطالعه موردی ووهان، چین. حفظ کنید. جامعه شهرها 2020 , 63 , 102455. [ Google Scholar ] [ CrossRef ]
- تانگ، ایکس. فنگ، ی. الگوهای فعلی و آینده شهری چگونه به برنامه ریزی شهری پاسخ می دهند؟ یک رویکرد مدل سازی اتوماتای سلولی یکپارچه شهرها 2019 ، 92 ، 247–260. [ Google Scholar ] [ CrossRef ]
- لیو، ی. ژو، ی. برنامه ریزی فضایی سرزمین و سیستم حکومت داری ملی در چین. خط مشی استفاده از زمین 2021 ، 102 ، 105288. [ Google Scholar ] [ CrossRef ]
- جنایو، M.-P. هرسپرگر، آ. Bürgi، M. شامل گسترش شهری – ارزیابی اثربخشی مرزهای رشد شهری تعیین شده توسط طرح کاربری زمین سوئیس. سیاست کاربری زمین 2009 ، 26 ، 224-232. [ Google Scholar ] [ CrossRef ]
- رهنما، MR پیشبینی تغییرات کاربری اراضی در کلانشهر مشهد با استفاده از اتوماتای سلولی و مدل زنجیره مارکوف برای سالهای 2016-2030. حفظ کنید. جامعه شهرها 2020 , 64 , 102548. [ Google Scholar ] [ CrossRef ]
- یو، جی. هاگن زانکر، آ. Santissadeekorn، N.; هیوز، اس. کالیبراسیون مدلهای رشد شهری اتوماتای سلولی از پیدایش شهری به بعد – یک کاربرد جدید از محاسبات تقریبی بیزی زنجیره مارکوف مونت کارلو. محاسبه کنید. محیط زیست سیستم شهری 2021 ، 90 ، 101689. [ Google Scholar ] [ CrossRef ]
- آندریاس، آر. احمد، م. لئونی، ک. کلودیا، ال. مدل سازی مناطق شهری: مقایسه ماشین های تصادفی جنگل و بردار پشتیبان برای اتوماتای سلولی. ترانس. GIS 2021 ، 25 ، 1625-1645. [ Google Scholar ]
- هاگناور، جی. عمرانی، ح. Helbich، M. ارزیابی عملکرد 38 مدل یادگیری ماشین: مورد نرخ مصرف زمین در بایرن، آلمان. بین المللی جی. جئوگر. Inf. علمی 2019 ، 33 ، 1399–1419. [ Google Scholar ] [ CrossRef ]
- Chen, Y. یک اتومات سلولی مبتنی بر پچ توسعه یافته برای شبیه سازی رشد شهری افقی و عمودی تحت مسیرهای اجتماعی-اقتصادی مشترک. محاسبه کنید. محیط زیست سیستم شهری 2021 ، 91 ، 101727. [ Google Scholar ] [ CrossRef ]
- یانگ، جی. گونگ، جی. تانگ، دبلیو. لیو، سی. مدل اتوماتای سلولی مبتنی بر پچ شبیهسازی رشد شهری: ادغام بازخورد بین ترکیب کمی و پیکربندی فضایی. محاسبه کنید. محیط زیست سیستم شهری 2019 ، 79 ، 101402. [ Google Scholar ] [ CrossRef ]
- اداره آمار گوانگژو سالنامه آماری گوانگژو 2021 ; انتشارات آمار چین: پکن، چین، 2021. [ Google Scholar ]
- ژو، ایکس. لو، ایکس. لیان، اچ. چن، ی. Wu، Y. ساخت یک سیستم برنامه ریزی فضایی در سطح شهر: مطالعه موردی “ادغام چند برنامه ریزی” در شهر یولین، چین. Habitat Int. 2017 ، 65 ، 32-48. [ Google Scholar ] [ CrossRef ]
- راهنمای تدوین برنامه ریزی کلی فضای سرزمینی شهرداری (آزمایشی) ; وزارت منابع طبیعی: پکن، چین، 2022.
- پونتیوس، آر.جی. بوئرسما، دبلیو. کاستلا، جی.-سی. کلارک، ک. دی نیس، تی. دیتزل، سی. دوان، ز. فوتسینگ، ای. گلدشتاین، ن. کوک، ک. و همکاران مقایسه نقشه های ورودی، خروجی و اعتبارسنجی برای چندین مدل تغییر زمین. ان Reg. علمی 2008 ، 42 ، 11-37. [ Google Scholar ] [ CrossRef ]



بدون دیدگاه