

عقل سلیم این است که واکنش و اقدام فوری از جمله مهمترین اصطلاحات در مورد ایمنی عمومی هستند و سیستم های واکنش اضطراری (ERS) اجزای فناوری هستند که به شدت با این هدف مرتبط هستند. در حالی که استفاده از ERS ها به طور فزاینده ای در بسیاری از جنبه های زندگی روزمره مورد استفاده قرار می گیرد، ترکیب آنها با داده های بیومتریک و مکان در زمان واقعی دیدگاه متفاوتی را ارائه می دهد. هراس یکی از مهم ترین شاخص های اورژانسی است. تاکنون، وقایع هراس به هر علتی به صورت موضعی درمان میشوند. تلاشهای مختلفی برای شناسایی چنین رویدادهایی بر اساس روشهای سنتی مانند فنآوریهای نظارت بصری و سیستمهای تعامل جامعه پیشنهاد شدهاند. منظور این نامه دو جانبه است. اولین، یک مجموعه داده چندوجهی ابتکاری حاوی دادههای بیومتریک و مکانی-زمانی مرتبط با تشخیص حالت وحشت در افراد که فعالیتهای مختلف را در یک دوره معین انجام میدهند، ارائه میکند. برای این منظور، دادههای موقعیت مکانی فعال شده با زمان با بیومتریکهایی که از ابزارهای پوشیدنی و گوشیهای هوشمند به دست میآیند ترکیب میشوند که در زمان واقعی تجزیه و تحلیل میشوند و دادههایی را تولید میکنند که نشاندهنده رویدادهای وحشتناک احتمالی است که به صورت جغرافیایی توصیف شدهاند. دوم، مجموعه داده پیشنهادی برای آموزش مدلهای مختلف یادگیری ماشین استفاده میشود و کاربرد آنها برای تشخیص درست حالتهای هراس از رفتار عادی بهطور کامل مورد بررسی قرار میگیرد. در نتیجه، طبقهبندیکننده SVM گاوسی در بین هفت طبقهبندیکننده رتبه اول را کسب کرد و به امتیاز دقت ۹۴.۵ درصد دست یافت. مجموعه داده همچنین در یک چارچوب یادگیری عمیق آزمایش شد و به سطح دقت 93.4٪ رسید. یک رویکرد حافظه کوتاه مدت نیز مورد استفاده قرار گرفت که به دقت بالای 94٪ رسید. علاوه بر این، سهم ویژگیهای مختلف بیومتریک و مکانی به صورت عمیق مورد تجزیه و تحلیل قرار میگیرد تا اهمیت جزئی آنها در فرآیند کلی تشخیص هراس مشخص شود. این در حال حرکت به سمت ایجاد یک ERS ارجاع جغرافیایی هوشمند است که می تواند برای اطلاع رسانی به مقامات در مورد یک رویداد بالقوه ناخوشایند از طریق شناسایی الگوهای احتمالی هراس جمعیت و کمک به اقدام متناسب با دریافت اطلاعات از منبع رویداد استفاده شود. بدن انسان. مجموعه داده پیشنهادی تحت نسخه سوم مجوز عمومی عمومی گنو (GPL v3) از طریق پلتفرم GitHub آزادانه در جامعه علمی توزیع می شود. سهم ویژگیهای مختلف بیومتریک و جغرافیایی به طور عمیق مورد تجزیه و تحلیل قرار میگیرد تا اهمیت جزئی آنها در فرآیند کلی تشخیص هراس مشخص شود. این در حال حرکت به سمت ایجاد یک ERS ارجاع جغرافیایی هوشمند است که می تواند برای اطلاع رسانی به مقامات در مورد یک رویداد بالقوه ناخوشایند از طریق شناسایی الگوهای احتمالی هراس جمعیت و کمک به اقدام متناسب با دریافت اطلاعات از منبع رویداد استفاده شود. بدن انسان. مجموعه داده پیشنهادی تحت نسخه سوم مجوز عمومی عمومی گنو (GPL v3) از طریق پلتفرم GitHub آزادانه در جامعه علمی توزیع می شود. سهم ویژگیهای مختلف بیومتریک و جغرافیایی به طور عمیق مورد تجزیه و تحلیل قرار میگیرد تا اهمیت جزئی آنها در فرآیند کلی تشخیص هراس مشخص شود. این در حال حرکت به سمت ایجاد یک ERS ارجاع جغرافیایی هوشمند است که می تواند برای اطلاع رسانی به مقامات در مورد یک رویداد بالقوه ناخوشایند از طریق شناسایی الگوهای احتمالی هراس جمعیت و کمک به اقدام متناسب با دریافت اطلاعات از منبع رویداد استفاده شود. بدن انسان. مجموعه داده پیشنهادی تحت نسخه سوم مجوز عمومی عمومی گنو (GPL v3) از طریق پلتفرم GitHub آزادانه در جامعه علمی توزیع می شود. این در حال حرکت به سمت ایجاد یک ERS ارجاع جغرافیایی هوشمند است که می تواند برای اطلاع رسانی به مقامات در مورد یک رویداد بالقوه ناخوشایند از طریق شناسایی الگوهای احتمالی هراس جمعیت و کمک به اقدام متناسب با دریافت اطلاعات از منبع رویداد استفاده شود. بدن انسان. مجموعه داده پیشنهادی تحت نسخه سوم مجوز عمومی عمومی گنو (GPL v3) از طریق پلتفرم GitHub آزادانه در جامعه علمی توزیع می شود. این در حال حرکت به سمت ایجاد یک ERS ارجاع جغرافیایی هوشمند است که می تواند برای اطلاع رسانی به مقامات در مورد یک رویداد بالقوه ناخوشایند از طریق شناسایی الگوهای احتمالی هراس جمعیت و کمک به اقدام متناسب با دریافت اطلاعات از منبع رویداد استفاده شود. بدن انسان. مجموعه داده پیشنهادی تحت نسخه سوم مجوز عمومی عمومی گنو (GPL v3) از طریق پلتفرم GitHub آزادانه در جامعه علمی توزیع می شود.
کلید واژه ها:
تشخیص وحشت ؛ بیومتریک ; یادگیری ماشینی ؛ یادگیری عمیق ؛ طبقه بندی ; داده های زمان واقعی ؛ سیستم های واکنش اضطراری ؛ داده های جغرافیایی
1. مقدمه
دو مورد از مهمترین ارکان ثبات اجتماعی در هر جامعه، سلامت عمومی و امنیت عمومی است. بدون شک، واکنش عملیاتی فوری در شرایط اضطراری بهداشت عمومی یا ایمنی عمومی بسیار مهم است و سازمانهای با دسترسی جهانی و همچنین خود کشورها، چنین مکانیسمهایی را در استراتژی گستردهتر خود ادغام میکنند [ 1 ، 2 ]. مشاهده شده است که در سال های اخیر توسعه سیستم هایی که هدف آن اطلاع رسانی به موقع مقامات در مورد موارد اضطراری است، به طور تصاعدی افزایش یافته است [ 3 ].
سیستم های واکنش اضطراری (ERS) راه حل های یکپارچه ای هستند که حوادث فوری و شدید را کنترل می کنند [ 4 ]. آنها از تکامل فناوری اطلاعات سود برده اند که منجر به افزایش پاسخگویی و اثربخشی شده است [ 5 ]. طیف گسترده ای از حسگرهای آنلاین موجود اجازه می دهد تا تصمیمات علمی در مورد شرایط اضطراری بر اساس داده های زمان واقعی اتخاذ شود.
Panic و تشخیص صحیح آن یک زمینه کاربردی است که بدون شک از ERS ها سود می برد. تلاشها برای مدلسازی و تحلیل رفتار وحشتزدگی برای شناسایی، بهعنوان مثال، الگوهای فرار از جمعیت، به سال 2000 برمیگردد، زمانی که، برای مثال، هلبینگ و همکارانش. در [ 6 ] از یک مدل رفتار عابر پیاده برای بررسی مکانیسمهای (و پیششرطهای) وحشت و پارازیت توسط حرکت ناهماهنگ در جمعیت استفاده کرد. در ادبیات اخیر، مطالعات متعدد و همچنین سیستمهایی در حال تولید وجود دارد که با تشخیص هراس بر اساس فناوریهای دوربین مدار بسته (تلویزیون مدار بسته) سروکار دارند. آنها شامل تکنیکهای نظارتی میشوند که دادههای بصری را بر حسب تصاویر ثابت و/یا توالیهای ویدیویی برای تجزیه و تحلیل رفتار انسان افراد یا گروههایی از مردم جمعآوری میکنند. به عنوان مثال، هائو و همکاران. [ 7] در مطالعه تحقیقاتی خود یک رویکرد کاملاً جدید برای تشخیص رفتار وحشت جمعیت بر اساس ویژگیهای جریان نوری پیشنهاد میکنند. اولین قدم یک فیلم برداری است که معمولاً از منابع ویدئویی استاندارد مانند دوربین مداربسته آنلاین یا پایگاه داده های ویدیویی آفلاین تهیه می شود. هنگامی که ویژگیها از ویدیوها استخراج میشوند، مقادیر مدلسازی میشوند و هیستوگرام یا مدلهای احتمال برای تجزیه و تحلیل جمعیت یا رفتارهای فردی ساخته میشوند. در دیدگاهی دیگر، عمار و همکاران. [ 8] یک سیستم نظارت آنلاین و پیوسته از یک مکان عمومی خاص را با استفاده از یک دوربین ثابت از یک سو و روشی برای تجزیه و تحلیل بلادرنگ تصاویر گرفته شده از سوی دیگر توصیف می کند. این سیستم بر اساس یک چارچوب یادگیری عمیق است که در آن یک رویکرد حافظه کوتاه مدت (LSTM) اتخاذ شده است که قادر به یادگیری وابستگی ترتیب در توالی داده است. ثابت شده است که LSTM در به خاطر سپردن همبستگیهای میان رویدادهای زمانی و پیشبینی یک مقدار آینده با توجه به دادههای تاریخی بسیار موفق است [ 9 ].
دسته خاصی از چنین سیستم هایی بر اساس مداخله کاربر در گزارش یک رویداد اضطراری است. اشکال چنین رویکردهایی که به طور گسترده به عنوان روشهای مشارکت جامعه از آن یاد میشود، این است که در مواقع اضطراری بعید است که افراد به جای فرار، اولویت را به گزارش رویداد بدهند. سوفری و همکاران [ 10 ] بیان می کند که ERS ها بخش کلیدی آمادگی در برابر بلایا هستند [ 11 ]. آنها جزء ضروری در ارائه اطلاعات به موقع و مؤثر به افراد و جوامع در نظر گرفته می شوند تا بتوان پاسخ های فوری، مناسب و مؤثری را برای کاهش صدمات احتمالی و مرگ، و آسیب به اموال و معیشت اتخاذ کرد [ 12 ، 13 ، 14 ].].
در یک نوع رویکرد متفاوت، سایر مطالعات تحقیقاتی از دستگاه های پوشیدنی برای جمع آوری داده های بیومتریک و تجزیه و تحلیل آنها برای تشخیص استرس استفاده می کنند. پوشیدنیها روشی بالغ برای جمعآوری دادههای دقیق و بیدرنگ را فراهم میکنند، زیرا دسترسی به حسگرهای فناوری پیشرفته متعددی وجود دارد که اطلاعات ارزشمندی مانند ضربان قلب، تغییرات ضربان قلب، سطح اکسیژن و بسیاری موارد دیگر را بسته به نوع دستگاه ارائه میدهد. علاوه بر این، با جفت شدن آنها با جدیدترین روشهای ارتباطی، مانند قابلیتهای حسگر گوشیهای هوشمند 5G، میتوان گفت ترکیبی از دادههای بلادرنگ وجود دارد که میتواند یک تغییر بازی در این زمینه تحقیقاتی باشد. لیو و همکاران [ 15]، پس از تجزیه و تحلیل ادبیات تخلیه جمعیت بر اساس دادههای استخراجشده از Web of Science با استفاده از رویکردهای کتابسنجی، به این نتیجه رسیدیم که تحقیقات در مورد سیستمها، تجزیه و تحلیل کمی و مطالعات تجسمی در مورد تخلیه جمعیت هنوز یک زمینه در حال توسعه است [ 16 ، 17 ، 18 ، 19 ، 20 ]. چان هن تسای و همکاران [ 21] از دادههای ابزارهای پوشیدنی برای پیشبینی میزان احتمال ابتلا به اختلال حمله پانیک در آینده بر اساس دادههای سری زمانی استفاده میکند. به طور خاص، این مطالعه با هدف ارائه یک مدل پیشبینی PA (حمله پانیک) 7 روزه و تعیین رابطه بین یک PA آینده و ویژگیهای مختلف، از جمله عوامل فیزیولوژیکی، عوامل اضطراب و افسردگی، و شاخص کیفیت هوا (AQI) است. در مطالعه دیگری، روبین و همکاران. [ 22 ] برای پیشبینی حملات پانیک پیش رو و ارائه مداخلات در لحظه بر روی یک دستگاه تلفن هوشمند در نظر گرفته شده است. هدف از این نوع مداخلات کاهش شدت علائم با قادر ساختن کاربر برای پاسخ دادن به دورههای هراس نزدیک است. در مرحله بعد، کوتسارووا و ماتسکین سیستمی را پیشنهاد کردند که حسگر جمعیتی موبایل و دستگاه های پوشیدنی را برای مدیریت موقعیت های هشدار دهنده ترکیب می کند [ 23 ]]. این کار بر اساس یک سیستم crowdsensing موجود به نام CrowdS است. یک برنامه ساعت هوشمند که از حسگرهای دستگاه برای تشخیص رویدادهای غیرعادی استفاده می کند ساخته شد. سپس دو رویکرد برای ادغام ساعت هوشمند با پلتفرم CrowdS وجود داشت. اتصال مستقیم از طریق اینترنت و اتصال از طریق تلفن هوشمند با جفت کردن یک برنامه ساعت هوشمند از طریق بلوتوث.
در آخر اما جالبترین نکته، Alsalat و همکاران. [ 24 ] تلاش برای تشخیص وحشت انسان بر اساس دستگاه های پوشیدنی با استفاده از تکنیک های یادگیری ماشینی برای تمایز بین حالت استرس و آرامش یک شی. تیم آنها روشی ساخته است که داده ها را از کاربر جمع آوری می کند، آن ها را به استرس یا آرامش طبقه بندی می کند و در صورت استرس، داده ها را برای پردازش و نقشه برداری به سرور ارسال می کند. آنها با روش های یادگیری ماشینی و یادگیری عمیق آزمایش کرده اند و نتایج با دقت بالا را گزارش کرده اند. متأسفانه مجموعه داده آنها به صورت عمومی در دسترس نیست.
هدف این مقاله دو مورد است: اول، نوع جدیدی از مجموعه دادههای جغرافیایی (هندسه نقطهای) متشکل از دادههای بیومتریک و مکانی-زمانی برای تشخیص استرس پیشنهاد میکند، و دوم، استفاده از تکنیکهای یادگیری ماشینی را برای توسعه یک مدل پیشبینی برای استرسزا بررسی میکند. مناسبت ها. این با جمعآوری دادههای غیرشخصی از دستگاههای پوشیدنی و گوشیهای هوشمند و استفاده از آنها برای آموزش یک مدل یادگیری ماشینی انتخاب شده بهدست میآید. مجموعه داده جدید شامل ویژگیهای بیومتریک مانند ضربان قلب و تغییرات ضربان قلب است. داده های مکانی-زمانی و حرکتی مانند مختصات مکان (طول و عرض جغرافیایی)، فعالیت، سرعت و مراحل. و همچنین داده های توصیفی مانند جنسیت، سن و وزن. یک مشخصه بیومتریک مشتق نیز پیشنهاد شده است که انحراف اندازهگیری ضربان قلب فعلی را در برابر میانگین متحرک ضربان قلب پنجرههای زمانی مختلف کمی نشان میدهد. تست های رتبه بندی اهمیت ویژگی مشتق شده پیشنهادی را برجسته کردند، در حالی که نتایج تجربی نشان می دهد که به طور قابل توجهی دقت طبقه بندی مدل های مختلف ماشین و یادگیری عمیق را بهبود می بخشد. آزمایشهای تجسم بیشتر نشان میدهند که این رویکرد میتواند مبنای یک سیستم تشخیص وحشت کارآمد باشد.
رویکرد پیشنهادی با نقاط ضعفی که در روشهای جایگزین دیگر در رابطه با تشخیص هراس ایجاد میشود مقابله میکند و چارچوبی کارآمد برای غلبه بر آنها ارائه میکند. به طور خاص، رویدادهای هراس شناسایی شده توسط فناوریهای نظارت بصری از نظر فضایی توسط محدوده تجهیزات بصری محدود میشوند. به طور مشابه، سیستم های مشارکت جامعه به شدت بر آگاهی دائمی انسان و پاسخ شخصی فوری تکیه دارند. از سوی دیگر، ماهیت بیومتریک و مکانی-زمانی بیدرنگ دادهها در رویکرد پیشنهادی از نظر مکانی نامحدود است و اطلاعات بهطور بیعیب و نقص درست از منبع رویداد یعنی بدن انسان منتقل میشوند. اگرچه اندازه گیری های بیومتریک به شدت تحت تأثیر تغییرات در وضعیت عاطفی و روانی یک سوژه قرار می گیرد، در رویکرد پیشنهادی، دامنه تشخیص وضعیت هراس سوژه بدون تمایز بین منابع مختلف استرس (پزشکی، روانی، عاطفی و غیره) است. مجموعه دادههای چندوجهی پیشنهادی، که مجموعهای از دیدگاههای جغرافیایی، بیومتریک و حرکت را ترکیب میکند، به دانشمندان این امکان را میدهد تا روشهای غنیشده را اعمال کنند و تحلیل را از سطح فردی مقیاسبندی کنند و به طور بالقوه آن را به سطح جمعیت گسترش دهند. داشتن طبقهبندیکنندههای یادگیری ماشینی آموزشدیده بر روی چنین مجموعه داده غنی برای تشخیص استرس، بسته به جنبه بیومتریک و حرکت ویژگیها، امکان بررسی بیشتر پدیده را فراهم میکند. این برای مقایسه همبستگی مکانی-زمانی سوژه هایی است که تشخیص رویدادهای پیش بینی نشده احتمالی را در سطح جمعیت هدف قرار می دهند. که مجموعهای از دیدگاههای زمینفضایی، بیومتریک و حرکت را ترکیب میکند، این توانایی را برای دانشمندان فراهم میکند تا روشهای غنیشده را به کار ببرند و تجزیه و تحلیل را از سطح فردی شروع کنند و به طور بالقوه آن را به سطح جمعیت گسترش دهند. داشتن طبقهبندیکنندههای یادگیری ماشینی آموزشدیده بر روی چنین مجموعه داده غنی برای تشخیص استرس، بسته به جنبه بیومتریک و حرکت ویژگیها، امکان بررسی بیشتر پدیده را فراهم میکند. این برای مقایسه همبستگی مکانی-زمانی سوژه هایی است که تشخیص رویدادهای پیش بینی نشده احتمالی را در سطح جمعیت هدف قرار می دهند. که مجموعهای از دیدگاههای زمینفضایی، بیومتریک و حرکت را ترکیب میکند، این توانایی را برای دانشمندان فراهم میکند تا روشهای غنیشده را به کار ببرند و تجزیه و تحلیل را از سطح فردی شروع کنند و به طور بالقوه آن را به سطح جمعیت گسترش دهند. داشتن طبقهبندیکنندههای یادگیری ماشینی آموزشدیده بر روی چنین مجموعه داده غنی برای تشخیص استرس، بسته به جنبه بیومتریک و حرکت ویژگیها، امکان بررسی بیشتر پدیده را فراهم میکند. این برای مقایسه همبستگی مکانی-زمانی سوژه هایی است که تشخیص رویدادهای پیش بینی نشده احتمالی را در سطح جمعیت هدف قرار می دهند. داشتن طبقهبندیکنندههای یادگیری ماشینی آموزشدیده بر روی چنین مجموعه داده غنی برای تشخیص استرس، بسته به جنبه بیومتریک و حرکت ویژگیها، امکان بررسی بیشتر پدیده را فراهم میکند. این برای مقایسه همبستگی مکانی-زمانی سوژه هایی است که تشخیص رویدادهای پیش بینی نشده احتمالی را در سطح جمعیت هدف قرار می دهند. داشتن طبقهبندیکنندههای یادگیری ماشینی آموزشدیده بر روی چنین مجموعه داده غنی برای تشخیص استرس، بسته به جنبه بیومتریک و حرکت ویژگیها، امکان بررسی بیشتر پدیده را فراهم میکند. این برای مقایسه همبستگی مکانی-زمانی سوژه هایی است که تشخیص رویدادهای پیش بینی نشده احتمالی را در سطح جمعیت هدف قرار می دهند.
2. رفتار و حس هراس
2.1. وحشت
پانیک پدیده ای است که عموماً در روانشناسی و علوم انسانی مورد مطالعه قرار می گیرد و اغلب با پیامدهای آن شناسایی می شود. این یک احساس ناگهانی و شدید از اضطراب یا ترس است که از فکر و عمل معقول جلوگیری می کند و ممکن است برای تأثیرگذاری بر بسیاری از افراد گسترش یابد [ 25 ]. این می تواند توسط یک فرد یا به طور همزمان در یک گروه یا یک جمعیت احساس شود و با پسرفت ذهنیت ها به سطح باستانی و گروهی مشخص می شود، که منجر به واکنش های بدوی پرش های ناامیدکننده، تحریک بی رویه خشونت یا خودکشی جمعی می شود، همانطور که در [. 26 ].
هراس را می توان با دو جنبه مختلف، یعنی ویژگی های فیزیکی و ویژگی های روانی آن مورد مطالعه قرار داد [ 27 ]. با توجه به ویژگی های فیزیکی، هلبینگ و همکاران. [ 6 ] و همچنین براچا [ 27] رجوع به پاسخ جنگ و گریز شود. هلبینگ بیان میکند که «ویژگیهای مشخصه هراس فرار را میتوان به صورت زیر خلاصه کرد: (1) مردم حرکت میکنند یا سعی میکنند بسیار سریعتر از حد معمول حرکت کنند. (2) افراد شروع به هل دادن می کنند و تعاملات بین مردم ماهیت فیزیکی پیدا می کند. (3) حرکت و به ویژه عبور از یک گلوگاه ناهماهنگ می شود. (4) در خروجی ها، قوس و گرفتگی مشاهده می شود. (5) مربا ایجاد می شود. (6) فعل و انفعالات فیزیکی در انبوه جمعیت افزایش یافته و باعث ایجاد فشارهای خطرناکی می شود که می تواند موانع فولادی را خم کند یا دیوارهای آجری را پایین بیاورد. (7) فرار توسط افراد افتاده یا مجروح که به عنوان “موانع” عمل می کنند، کندتر می شود. (8) مردم تمایل به رفتار توده ای نشان می دهند، یعنی انجام کارهایی که دیگران انجام می دهند. (9) خروجی های جایگزین اغلب نادیده گرفته می شوند یا به طور موثر در موقعیت های فرار استفاده نمی شوند.
از سوی دیگر، ویژگیهای روانشناختی به سیگنالهای زیستی خاصی که توسط هاگ و همکاران بیان شده است، گره خوردهاند. [ 28 ]. وقتی می ترسیم ضربان قلبمان تند می شود، تنفس تند می شود و دهان خشک می شود، ماهیچه ها منقبض می شوند، کف دستمان عرق می کند و ممکن است بخواهیم بدویم. این تغییرات بدنی توسط سیستم عصبی خودمختار که عضله قلب، ماهیچه صاف و غدد برون ریز را کنترل می کند، واسطه می شود [ 29 ].]. خود سیستم عصبی خودمختار را می توان به دو بخش سمپاتیک و پاراسمپاتیک تقسیم کرد. هر دو در ارتباط با یکدیگر و با سیستم حرکتی جسمی برای تنظیم بیشتر انواع رفتار، چه در حالت عادی و چه در شرایط اضطراری، عمل می کنند. اگرچه چندین عملکرد احشایی عمدتاً توسط یک یا آن بخش کنترل میشوند، و اگرچه هر دو بخش سمپاتیک و پاراسمپاتیک اغلب اثرات متضادی بر بافتهای هدف عصبشده اعمال میکنند، این تعادل فعالیت بین این دو است که به حفظ یک محیط داخلی با ثبات در صورت کمک میکند. تغییر شرایط خارجی برخی از احساسات می توانند بر این تعادل تأثیر بگذارند و می توانند منجر به طیف گسترده ای از واکنش های بدنی قابل مقایسه با آنچه در بالا توضیح داده شد [ 30 ] شود.
2.2. Crowdsensing موبایل
سنجش جمعیت موبایل، اولین بار توسط گانتی و همکاران معرفی شد. در [ 31 ]، تکنیکی است که از گوشیهای هوشمند، تبلتها، رایانهها و دستگاههای پوشیدنی برای جمعآوری دادههای مورد نیاز و استخراج اطلاعات برای اندازهگیری، تجزیه و تحلیل، تخمین یا استنتاج هر فرآیند مورد علاقه استفاده میکند [ 32 ]. از فناوری IoT بهره می برد، بازاری که با سرعتی سریع در حال رشد است. افرادی که از این دستگاهها استفاده میکنند نقش حسگرهای بیدرنگ را بازی میکنند که مکانیسمها را با دادههای زمان واقعی خود تغذیه میکنند.
در حال حاضر، درگیری و سنجش واقعی جمعیت با ارجاع مکان و نظارت بر داده های بیومتریک سر و کار دارد. ساقیب و همکاران [ 33 ] توجه داشته باشید که ضربان قلب یا نبض یکی از علائم حیاتی است که برای اندازه گیری عملکردهای اساسی بدن انسان استفاده می شود. سایر دادههای بیومتریک شامل فعالیت الکترودرمال، الکترومیوگرام، تنفس، الکتروکاردیوگرام، نبض حجم خون، تغییرات ضربان قلب، دمای پوست و قطر مردمک است. حالت در [ 34 ]. این دادههای بیومتریک از یک دستگاه اینترنت اشیا، مانند ساعت هوشمند، با استفاده از روشی به نام photoplethysmography [ 35 ] جمعآوری میشوند.]. این یک روش غیرتهاجمی کم هزینه است که با اندازه گیری سطح پوست تغییرات حجم خون در بستر میکروواسکولار بافت را تشخیص می دهد.
مطابق با این دادههای بیومتریک، اطلاعات مکانی-زمانی مربوط به موقعیت فیزیکی سوژه شامل طول جغرافیایی، طول جغرافیایی، ارتفاع، سرعت، گامها و مهر زمانی فعلی نیز جمعآوری میشود. مجموعهای از ویژگیها مانند موارد فوق، اساس رویکرد یادگیری ماشین پیشنهادی است که در بخشهای بعدی توضیح داده شده است.
3. روش شناسی
دامنه روش پیشنهادی تبدیل اندازهگیریهای جمعآوریشده (دادههای بیومتریک و مکانی-زمانی) به اطلاعات ارزشمند به منظور افشای الگوهای پنهانی است که احتمالاً رفتار وحشتزده را آشکار میکند. با شروع از نقطه پایانی کاربر، گردش کار از مچ دست شروع میشود، جایی که برنامهای که روی دستگاه پوشیدنی اجرا میشود، ردپای بیومتریک بلادرنگ را در مورد دادههایی مانند ضربان قلب و تغییرات ضربان قلب نظارت میکند. در همان زمان، یک برنامه جفتی که روی یک تلفن هوشمند اندرویدی اجرا می شود، مختصات موقعیت مکانی GPS (طول و عرض جغرافیایی)، داده های زمانی، فعالیت کاربر، سرعت و مراحل را جمع آوری می کند. پس از یک بازه زمانی یک ثانیه، تمام این اطلاعات در یک بسته UDP واحد جمع میشوند و به صورت رمزگذاری شده از طریق شبکه GSM به سرور ارسال میشوند. در سمت سرور، یک کد جاوا بسته های UDP را دریافت می کند. اطلاعات را رمزگشایی می کند و هندسه های نقطه ای را با داشتن تمام ویژگی های ذکر شده در بالا به عنوان ویژگی می سازد. این روش امکان جمع آوری داده های بیومتریک و مکانی-زمانی دنیای واقعی را فراهم می کند که مبنای ایجاد مجموعه داده پیشنهادی است. مجموعه بزرگی از این اندازهگیریها برای آموزش طبقهبندیکننده یادگیری ماشین برای تشخیص درست حالتهای هراس از رفتار عادی استفاده میشود، همانطور که در نشان داده شده است.شکل 1 . دادههای اولیه دنیای واقعی توسط دو فرد، یکی مرد و دیگری زن، با استفاده از برنامهها و پیکربندی سختافزار فوق جمعآوری شد. فرآیند جمع آوری داده ها در محله ای در Paleo Psychiko، آتن، یونان انجام شد. از آنجایی که ایجاد شرایط استرس واقعی و ناگهانی دشوار است، آزمودنی ها حرکات و واکنش های خود را به منظور شبیه سازی آنها هماهنگ کردند.
شکل 2 مجموعه داده های واقعی مرد شرکت کننده را نشان می دهد. آزمودنی (فرد) پیاده است تا اینکه ناگهان اتفاقی می افتد که وارد حالت وحشت می شود و شروع به دویدن می کند. سوژه حتی زمانی که حالت هراس تمام شده است به دویدن ادامه می دهد و در نهایت به تدریج سرعت خود را کاهش می دهد و تا انتهای مسیر خود می رود. شکل 3اندازه گیری های بیومتریک و مکانی-زمانی مربوطه جمع آوری شده در طول آزمایش را به تصویر می کشد. مشاهده می شود که ضربان قلب در حین دویدن به شدت متمایل می شود، در حالی که تغییرپذیری ضربان قلب مسیر مخالفی را دنبال می کند و به طور قابل توجهی کاهش می یابد. همه اندازهگیریها تغییرات حالت را منعکس میکنند و همچنین تحت تأثیر قرار میگیرند، زیرا سوژه سعی میکند در وحشت فرار کند. هنگامی که آزمودنی از حالت استرس خارج شد، اندازهگیریهای بیومتریک و مکانی-زمانی به تدریج شروع به کاهش میکنند و به سطوح طبیعی باز میگردند.
3.1. مجموعه داده
در این بخش، مجموعه داده ای پیشنهاد شده است که از 27 موضوع مختلف تشکیل شده است که در یک بازه زمانی کوتاه نظارت می شوند. دو نفر از 27 سوژه، انسان های واقعی هستند که از ابزارهای پوشیدنی و تلفن هوشمند استفاده کرده و داده های دنیای واقعی را با استفاده از برنامه های همراه ضبط کرده اند. داده های مربوط به بقیه افراد به صورت مصنوعی تولید شد. دادههای بیومتریک و مکانی آنها در هر ثانیه به مدت 10 دقیقه به تصویر کشیده میشوند که منجر به مجموعهای از 600 اندازهگیری در هر سوژه میشود. در بیشتر موارد، یک رویداد وحشت شبیه سازی می شود که بر این اندازه گیری ها تأثیر می گذارد. با این حال، در سه مورد از آنها، هیچ رویداد وحشتناکی وجود ندارد. این به منظور گرفتن تنوع داده های مشاهده شده در هر دو حالت آرام و استرس است. داده های جمع آوری شده را می توان به صورت زیر خلاصه کرد:
- 1.
-
بیومتریک (از پوشیدنی): ضربان قلب، تغییرات ضربان قلب
- 2.
-
فضای زمانی (از گوشی هوشمند): مختصات مکان، فعالیت، سرعت، مراحل
- 3.
-
توصیفی (از پوشیدنی): جنسیت، سن، وزن
- 4.
-
شناسه امن (از گوشی هوشمند)
برای دستیابی به مجموعه ای واقعی از اندازه گیری ها، مقادیر چندین ویژگی به دقت بر اساس مطالعاتی که چنین اطلاعات مرتبطی را ارائه می دهند، تعیین می شوند. به عنوان مثال، بر اساس سلامت فوربس [ 36 ]، ضربان قلب طبیعی بسته به سن متفاوت است. افراد بین یک تا چهار سال دارای محدوده طبیعی استراحت قلب بین 80 تا 120 تا 130 ضربه در دقیقه هستند. افراد در گروه سنی پنج تا نه سال از 70 تا 100 یا 115 ضربه در دقیقه متغیر هستند. ضربان قلب طبیعی در حالت استراحت در سنین 10 سال به بالا به 60 تا 100 ضربه در دقیقه می رسد. ورزشکاران به یک دسته جداگانه تعلق دارند زیرا دامنه آنها 40 تا 60 ضربه در دقیقه است. علاوه بر این، مراکز آمریکایی برای کنترل بیماری [ 37] بیان می کند که حداکثر ضربان قلب حدود 220 ضربه در دقیقه (ضربان در دقیقه) منهای سن آزمودنی است. علاوه بر این، ضربان قلب هدف در فعالیتهای با شدت متوسط حدود 50 تا 70 درصد حداکثر ضربان قلب است، در حالی که در هنگام فعالیت بدنی شدید حدود 70 تا 85 درصد حداکثر است. به عنوان مثال، حداکثر ضربان قلب برای گروه سنی 20 تا 40 سال بین 180 تا 200 ضربه در دقیقه است. گروه سنی 45 تا 60 سال حدود 160 تا 175 سال و سنین 65 سال به بالا 150 تا 155 ضربه در دقیقه دارند.
برای جمع آوری داده های بیومتریک و موقعیتی خام، از یک ساعت پوشیدنی Samsung Galaxy Watch و همچنین یک گوشی هوشمند Samsung Galaxy A70 استفاده شده است. ویژگیهای بیومتریک و مکانی-زمانی مجموعه داده به طور مفصل به شرح زیر است:
ضربان قلب: این ویژگی اصلی بیومتریک است و بر حسب ضربان در دقیقه (bpm) اندازه گیری می شود.
تغییرپذیری ضربان قلب (HRV): این تفاوت زمانی بین دو ضربان متوالی قلب است و بر حسب میلی ثانیه (ms) اندازه گیری می شود. هر چه ضربان قلب شدیدتر باشد، اختلاف زمانی بین ضربان ها کمتر است.
مختصات مکان: طول و عرض جغرافیایی مکان.
فعالیت: این اطلاعات از حسگرهای ژیروسکوپ و شتابسنج گوشی هوشمند میآید و مشخص میکند که آیا فردی ثابت ایستاده، راه میرود، میدود یا در وسیله نقلیه است.
سرعت: توسط GPS گوشی هوشمند ارائه می شود و بر حسب کیلومتر بر ساعت اندازه گیری می شود.
مراحل: این معیار نیز توسط گوشی هوشمند ارائه شده و بر حسب گام در دقیقه اندازه گیری می شود.
جنسیت، سن، وزن: این اطلاعات جمعیت شناختی مفید است زیرا بر اندازه گیری های بیومتریک تأثیر می گذارد. به عنوان مثال، یک زن 78 ساله با وزن 60 کیلوگرم در حالی که در هراس است، ردپای بیومتریک متفاوتی نسبت به یک مرد 20 ساله با وزن 85 کیلوگرم دارد. در مجموع، مجموعه داده پیشنهادی شامل 14 آزمودنی مرد و 13 زن با مقادیر سن و وزن متفاوت است.
علاوه بر داده های خام فوق، یک ویژگی مشتق شده به نام انحراف میانگین متحرک ضربان قلب (HRMAD) معرفی شده است. این یک اثر زمانی روی مجموعه داده است که بر اساس یک پنجره زمانی مربوط به مقادیر ضربان قلب گذشته است. این نشان می دهد که فردی به طور ناگهانی اندازه گیری های بالایی از ضربان قلب داشته است که می تواند دلالت بر شرایط وحشتناک ناگهانی داشته باشد. به طور معمول، مقدار میانگین ضربان قلب آخرین دقیقه باید حدود 5 تا 10 ضربه در دقیقه باشد، بر اساس این فرض که کمی از میزان ضربان قلب در حالت استراحت متفاوت است. با توجه به اینکه سوژهای که در شرایط آرام راه میرود مقادیر ضربان قلبش 70 یا 80 ضربه در دقیقه است، میانگین ضربان قلب او بین 70 تا 80 خواهد بود و هر اندازهگیری بعدی در حالت آرام نیز در نهایت در این محدوده خواهد بود. از سوی دیگر، یک رویداد ناگهانی که باعث وحشت میشود، ضربان قلب را احتمالاً بیش از 150 ضربه در دقیقه افزایش میدهد، به این معنی که تفاوت با اندازهگیریهای قبلی بسیار زیاد است. ویژگی پیشنهادی به ترتیب در سه پنجره زمانی مختلف 10، 30 و 60 ثانیه (HRMAD10، HRMAD30 و HRMAD60) محاسبه میشود. این نشان می دهد که اندازه گیری ضربان قلب فعلی چقدر از میانگین متحرک یک پنجره زمانی خاص در گذشته انحراف دارد. پنجره زمانی به عنوان یک تکنیک هموارسازی عمل می کند که در آن باقیمانده ها و انحرافات بالقوه توسط فرآیند میانگین گیری جذب می شوند. به این ترتیب، یک اندازه گیری جریان ممکن، به عنوان مثال، با ارزش بالا، ممکن است به طور قابل توجهی از یک پنجره زمانی کوتاه اندازه گیری های مشابه با ارزش بالا منحرف نشود. با این حال،
باید توجه داشت که مجموعه داده شامل یک مقدار مهر زمانی است که شرح زمانی دقیقی از هر اندازه گیری جداگانه جمع آوری شده در هر ثانیه ارائه می دهد. جدول 1 شرح ویژگی های مجموعه داده را خلاصه می کند.
3.2. سناریوهای مجموعه داده
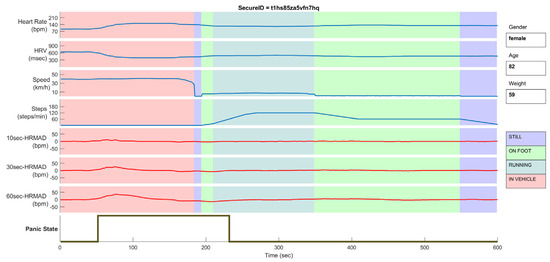
مجموعه داده پیشنهادی تلاش میکند تا سناریوهای مختلفی را به تصویر بکشد که رفتار افراد تحت استرس و/یا شرایط هراس را بدون تفاوت بین دلایلی که باعث آنها شده است، شبیهسازی میکند، که میتواند مبنای بیولوژیکی یا روانشناختی داشته باشد، یا ناشی از یک رویداد پیشبینینشده ناگهانی باشد که در نزدیکی استرس رخ داده است. موضوع. جدول 2 جزئیاتی را در مورد شش سناریوی مختلف که در مجموعه داده استفاده می شود و همچنین سه سناریو دیگر که با شرایط فقط آرامش (بدون هراس) مطابقت دارند، ارائه می دهد.
هر یک از سناریوهای هراس فوق الذکر بسته به ویژگی های توصیفی موضوع در چهار حالت مختلف ارائه می شود. اینها جوان / پیر و همچنین مرد / زن هستند. بنابراین، مجموعه داده شامل 27 مورد، یعنی 24 مورد هراس و سه مورد آرام است. شکل 4یک مورد وحشت را نشان می دهد که متعلق به سناریوی 1 است. در 100 ثانیه اول، سوژه در حالت ساکن آرام به نظر می رسد. شاخص های حرکتی صاف تا صفر هستند و شاخص های قلب در محدوده های استراحت قرار می گیرند. سپس ناگهان یک وضعیت هشدار دهنده رخ می دهد و سوژه حدود 20 ثانیه شروع به راه رفتن می کند و برای تلاش برای فرار آماده می شود. سپس سرعت آن افزایش می یابد و تا 22 ثانیه آینده شروع به کار می کند. پس از آن در مکانی امن پنهان می شود و 55 ثانیه منتظر می ماند. پس از ایمن شدن، پناهگاه خود را ترک می کند و تا 40 ثانیه آینده به فرار ادامه می دهد. تمام این فعالیت ها دوره استرس آن را نشان می دهد که بین 100 و 250 ثانیه یعنی 2 دقیقه و 30 ثانیه قرار می گیرد. در این دوره، شاخصهای بیومتریک مانند ضربان قلب، تغییرپذیری ضربان قلب و HRMAD 10، 30 و 60 ثانیه به تدریج شروع به انحراف میکنند، در حالی که دادههای مکانی-زمانی مانند سرعت، مراحل، و ایالت نیز تحت تأثیر قرار می گیرند. به طور خاص، ضربان قلب در 152 به اوج می رسد، HRV به 395 و پیک HRMAD10، HRMAD30 و HRMAD60 به ترتیب با 20، 35 و 55 bpm کاهش می یابد. تا آنجا که به ویژگی های حرکت مربوط می شود، سرعت به 9.9 کیلومتر در ساعت می رسد و پله ها به 87 پله در دقیقه صعود می کنند. پس از 254 ثانیه، سوژه از حالت استرس خارج می شود و زمانی که در نهایت متوقف می شود، حدود 200 ثانیه دیگر به طور معمول راه می رود. مقادیر بیومتریک و حرکت به سطح عادی باز می گردند. پس از 254 ثانیه، سوژه از حالت استرس خارج می شود و زمانی که در نهایت متوقف می شود، حدود 200 ثانیه دیگر به طور معمول راه می رود. مقادیر بیومتریک و حرکت به سطح عادی باز می گردند. پس از 254 ثانیه، سوژه از حالت استرس خارج می شود و زمانی که در نهایت متوقف می شود، حدود 200 ثانیه دیگر به طور معمول راه می رود. مقادیر بیومتریک و حرکت به سطح عادی باز می گردند.
در شکل 5سناریویی متفاوت از سناریوی قبلی نشان داده شده است که شامل فعالیت رانندگی است. سوژه مسیر خود را با رانندگی با یک وسیله نقلیه با سرعت حدود 40 کیلومتر در ساعت آغاز می کند. مقادیر بیومتریک برای این فعالیت در محدوده طبیعی قرار دارند، زیرا ضربان قلب حدود 90 ضربه در دقیقه، HRV در 650 میلی ثانیه و شاخص های HRMAD به ترتیب در محدوده 2- تا 2 است. داده های حرکتی در حالت آرام قرار دارند، در حالی که گام ها در دقیقه صاف به صفر هستند، زیرا سوژه در حال رانندگی است. همه اینها تا ثانیه 50 که اتفاقی در جاده می افتد و همه وحشت می کنند. سوژه که هنوز در وسیله نقلیه خود است، سعی می کند با رانندگی برای 2 دقیقه آینده از صحنه فرار کند. در این مرحله متوجه می شود که نمی تواند شتاب بیشتری بگیرد، همانطور که در نمودار می توان دید که سرعت ثابت می ماند. سوژه تصمیم می گیرد که وسیله نقلیه را متوقف کند و پیاده ادامه دهد. در ثانیه 190، با توقف خودرو، فعالیت به حالت ثابت تغییر می کند و تا چند ثانیه آینده بی حرکت می ماند. سپس سوژه برای 13 ثانیه بعد با پای پیاده محل را ترک می کند و برای 20 ثانیه بعد شروع به دویدن می کند. تا این لحظه، دادههای اندازهگیری شده نشان میدهند که آزمودنی در شرایط استرسی قرار دارد که از زمان وقوع رویداد هراس به مدت 3 دقیقه ادامه داشته است. در این دوره ضربان قلب در 152 bpm به اوج خود رسید، HRV به 395 کاهش یافت و HRMAD به ترتیب به 12، 26 و 36 bpm رسید. با توجه به داده های مکانی و زمانی، سرعت در حین دویدن به 6.6 کیلومتر در ساعت رسید و گام ها به حداکثر 58 در دقیقه رسیدند. پس از پایان دوره وحشت، آزمودنی برای چند ثانیه اما در حالتی آرام به دویدن ادامه داد و سپس حدود 2.5 دقیقه قبل از توقف کامل راه رفت. سپس سوژه برای 13 ثانیه بعد با پای پیاده محل را ترک می کند و برای 20 ثانیه بعد شروع به دویدن می کند. تا این لحظه، دادههای اندازهگیری شده نشان میدهند که آزمودنی در شرایط استرسی قرار دارد که از زمان وقوع رویداد هراس به مدت 3 دقیقه ادامه داشته است. در این دوره ضربان قلب در 152 bpm به اوج خود رسید، HRV به 395 کاهش یافت و HRMAD به ترتیب به 12، 26 و 36 bpm رسید. با توجه به داده های مکانی و زمانی، سرعت در حین دویدن به 6.6 کیلومتر در ساعت رسید و گام ها به حداکثر 58 در دقیقه رسیدند. پس از پایان دوره وحشت، آزمودنی برای چند ثانیه اما در حالتی آرام به دویدن ادامه داد و سپس حدود 2.5 دقیقه قبل از توقف کامل راه رفت. سپس سوژه برای 13 ثانیه بعد با پای پیاده محل را ترک می کند و برای 20 ثانیه بعد شروع به دویدن می کند. تا این لحظه، دادههای اندازهگیری شده نشان میدهند که آزمودنی در شرایط استرسی قرار دارد که از زمان وقوع رویداد هراس به مدت 3 دقیقه ادامه داشته است. در این دوره ضربان قلب در 152 bpm به اوج خود رسید، HRV به 395 کاهش یافت و HRMAD به ترتیب به 12، 26 و 36 bpm رسید. با توجه به داده های مکانی و زمانی، سرعت در حین دویدن به 6.6 کیلومتر در ساعت رسید و گام ها به حداکثر 58 در دقیقه رسیدند. پس از پایان دوره وحشت، آزمودنی برای چند ثانیه اما در حالتی آرام به دویدن ادامه داد و سپس حدود 2.5 دقیقه قبل از توقف کامل راه رفت. دادههای اندازهگیری شده نشان میدهد که آزمودنی در شرایط استرسی قرار دارد که از زمان وقوع رویداد هراس به مدت 3 دقیقه ادامه داشته است. در این دوره ضربان قلب در 152 bpm به اوج خود رسید، HRV به 395 کاهش یافت و HRMAD به ترتیب به 12، 26 و 36 bpm رسید. با توجه به داده های مکانی و زمانی، سرعت در حین دویدن به 6.6 کیلومتر در ساعت رسید و گام ها به حداکثر 58 در دقیقه رسیدند. پس از پایان دوره وحشت، آزمودنی برای چند ثانیه اما در حالتی آرام به دویدن ادامه داد و سپس حدود 2.5 دقیقه قبل از توقف کامل راه رفت. دادههای اندازهگیری شده نشان میدهد که آزمودنی در شرایط استرسی قرار دارد که از زمان وقوع رویداد هراس به مدت 3 دقیقه ادامه داشته است. در این دوره ضربان قلب در 152 bpm به اوج خود رسید، HRV به 395 کاهش یافت و HRMAD به ترتیب به 12، 26 و 36 bpm رسید. با توجه به داده های مکانی و زمانی، سرعت در حین دویدن به 6.6 کیلومتر در ساعت رسید و گام ها به حداکثر 58 در دقیقه رسیدند. پس از پایان دوره وحشت، آزمودنی برای چند ثانیه اما در حالتی آرام به دویدن ادامه داد و سپس حدود 2.5 دقیقه قبل از توقف کامل راه رفت.
در تمام مثالهای قبلی، هر اندازهگیری یک موضوع را در حالت آرام یا استرس نشان میدهد. در بخش بعدی، مدلهای یادگیری ماشین برای طبقهبندی اندازهگیریها به این دو کلاس درگیر میشوند. در حالی که این مدل با استفاده از مجموعه دادهای که در بالا توضیح داده شد به صورت آفلاین آموزش داده میشود، هدف نهایی این رویکرد تشخیص کارآمد حالت وحشت در بین اندازهگیریهای بیومتریک و مکانی-زمانی بر اساس زمان واقعی است.
4. راه اندازی آزمایشی و نتایج
4.1. طبقه بندی کننده های یادگیری ماشین
این بخش نحوه استفاده از مجموعه داده پیشنهادی را برای آموزش مدلهای مختلف یادگیری ماشینی توضیح میدهد و کاربرد آنها را برای تشخیص درست حالتهای هراس از رفتار عادی بررسی میکند. علاوه بر این، سهم ویژگیهای مختلف بیومتریک و مکانی به صورت عمیق مورد تجزیه و تحلیل قرار میگیرد تا اهمیت جزئی آنها در فرآیند کلی تشخیص وحشت مشخص شود. چندین مدل یادگیری ماشین مدرن برای فرآیند طبقهبندی استفاده میشود، یعنی درختهای تصمیم [ 38 ]، رگرسیون لجستیک [ 39 ]، بیز ساده گوسی و هسته [ 40 ]، هسته SVM و SVM گاوس [ 41 ]، و درختهای تقویتشده [ 42 ] . آنتروپی متقاطع به عنوان تابع هزینه برای وظایف طبقه بندی استفاده می شود. جدول 3پارامترهای تنظیم طبقه بندی برای هر مدل را خلاصه می کند. در همه آزمایشها، مجموعه دادههای موجود به 90 درصد برای آموزش و 10 درصد برای اهداف آزمایش تقسیم میشوند. همه آزمایشها در Matlab ® پیادهسازی شدهاند و بر روی یک Intel Core i7 @2.6 گیگاهرتز با 16 گیگابایت رم انجام شدهاند.
اثربخشی طبقهبندیکنندهها در کار طبقهبندی در ابتدا بر روی دادههای بیومتریک و مکانی-زمانی خام، یعنی ضربان قلب، تغییرپذیری ضربان قلب، فعالیت، سرعت و مراحل آزمایش میشود. جدول 4 دقت مدل های مختلف را نشان می دهد. مشاهده می شود که طبقه بندی کننده SVM گاوسی به بالاترین امتیاز دقت و به دنبال آن درخت تصمیم دست می یابد. در مقابل، بیز ساده لوح گاوسی ضعیف ترین نتایج را ارائه می دهد.
هنگامی که ویژگی HRMAD پیشنهادی درگیر باشد، نتایج طبقهبندی بیشتر بهبود مییابد. جدول 5 دقت هر سه مورد یعنی HRMAD10، HRMAD30 و HRMAD60 را نشان می دهد. مشاهده می شود که تقریباً همه طبقه بندی کننده ها (به جز رگرسیون لجستیک) دقت خود را بهبود می بخشند. بهترین نتیجه یک بار دیگر توسط Gaussian SVM ارائه شده است. قابل توجه ترین پیشرفت برای Bayes ساده هسته رخ می دهد، که دقت را از 80.3٪ به 85.3٪ افزایش می دهد.
ما همچنین عملکرد طبقه بندی را از دیدگاه انتخاب ویژگی بررسی کردیم. در واقع، سوالی که مطرح میشود این است که وقتی ویژگیهایی با قدرت پیشبینی پایین حذف میشوند، به چه سطحی از دقت میتوان دست یافت. این موضوع مهمی است، زمانی که جمعآوری دادهها پرهزینه یا دشوار است، بنابراین مدلی که بدون برخی پیشبینیکنندهها به طور رضایتبخش عمل میکند ترجیح داده میشود. برای این منظور، سه آزمون رتبهبندی ویژگی برای برآورد اهمیت هر یک از پیشبینیکنندهها، یعنی حداقل ارتباط بیشینه افزونگی (MRMR)، کایدو، و ANOVA [ 43 ] درگیر شد.]. الگوریتم MRMR مجموعهای از ویژگیهای بهینه را پیدا میکند که متقابلاً و حداکثر متفاوت هستند و میتوانند متغیر پاسخ را به طور مؤثر نشان دهند. به طور مشابه، توزیع مجذور کای (χ2) یک خانواده یک پارامتری از منحنیها است که معمولاً در آزمون فرضیهها، بهویژه آزمون کایدو برای خوبی برازش استفاده میشود. در نهایت، آنالیز واریانس (ANOVA) یک فرمول آماری است که برای مقایسه واریانس بین میانگین (یا میانگین) گروههای مختلف استفاده میشود.
جدول 6 نتایج رتبه بندی را برای انتخاب ویژگی خلاصه می کند. HRV و HRMAD60 به دو رتبه برتر دست یافتند. بر اساس این نتایج رتبه بندی، جدول 7 نتایج طبقه بندی را زمانی نشان می دهد که فقط از ویژگی های HRV یا HRV + HRMAD60 استفاده می شود. مشاهده می شود که حتی با وجود یک یا یک جفت ویژگی با رتبه برتر، طبقه بندی کننده ها همچنان نتایج معقولی ارائه می دهند.
4.2. یادگیری عمیق
علاوه بر طبقهبندیکنندههای یادگیری ماشین، از مجموعه داده پیشنهادی برای آموزش یک شبکه عصبی عمیق (DNN) و همچنین یک شبکه عصبی بازگشتی LSTM استفاده کردیم. معماری DNN از یک لایه کاملا متصل با اندازه خروجی 50 تشکیل شده است که به دنبال آن یک نرمال سازی دسته ای و یک لایه آستانه RELU قرار دارد. در انتهای شبکه، یک لایه کاملاً متصل، داده ها را با اعمال تابع softmax به دو کلاس طبقه بندی می کند. بهینه ساز Adam با نرخ یادگیری اولیه 0.001 استفاده می شود در حالی که اندازه کوچک دسته ای روی 16 تنظیم شده است. در این رویکرد، چهار مورد آزمایش شدند. مورد اول فقط شامل ویژگیهای خام (ضربان قلب، HRV، سرعت، قدمها و فعالیت) است، در حالی که سه مورد دیگر شامل یکی از سه پنجره زمانی HRMAD (HRMAD10، HRMAD30، HRMAD60) است. جدول 8نتایج طبقه بندی مربوطه را ارائه می دهد.
مدل LSTM نوعی شبکه عصبی بازگشتی است که می تواند نمایش داخلی داده های سری زمانی را بیاموزد. به منظور مقایسه با آزمایشهای قبلی که شامل ویژگی HRMAD پیشنهادی میشود، دوباره چهار مورد مورد بررسی قرار گرفت که با طول دنباله اعمال شده متفاوت هستند. به طور خاص، در حالت اول فقط از نمونه زمانی فعلی استفاده می شود در حالی که در سه مورد دیگر طول مراحل زمانی به ترتیب 10، 30 و 60 نمونه است. معماری شبکه LSTM از یک لایه ورودی دنباله ای به اندازه پنج تشکیل شده است که با تعداد ویژگی های خام مطابقت دارد. به دنبال آن یک لایه LSTM با 100 واحد پنهان است که به یک لایه کاملاً متصل با دو کلاس منتهی می شود که در آن از تابع softmax استفاده می شود. حل کننده Adam با نرخ یادگیری 0.001، آستانه گرادیان یک و حداکثر تعداد 50 دوره استفاده می شود.جدول 9 نتایج طبقه بندی شبکه LSTM را خلاصه می کند.
با در نظر گرفتن نتایج در هر دو رویکرد یادگیری عمیق، می توان مشاهده کرد که ویژگی HRMAD در مقایسه با حالتی که فقط ویژگی های خام اعمال می شود، دقت را به طور قابل توجهی بهبود می بخشد. علاوه بر این، در هر دو معماری، افزایش اندازه پنجره زمانی HRMAD (که در مورد LSTM به عنوان طول دنباله بیان میشود) منجر به افزایش دقت میشود. با مقایسه این دو رویکرد، LSTM بهترین دقت کلی 94.0٪ را ارائه می دهد. با این حال، این کمتر از دقت طبقه بندی 94.5٪ است که توسط SVM گاوسی به دست آمده است.
4.3. بحث
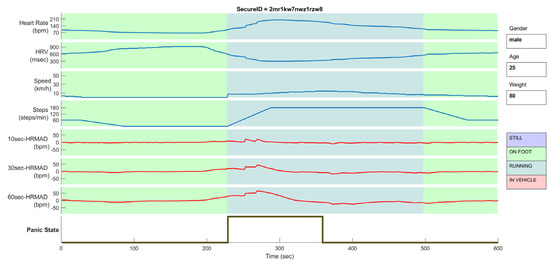
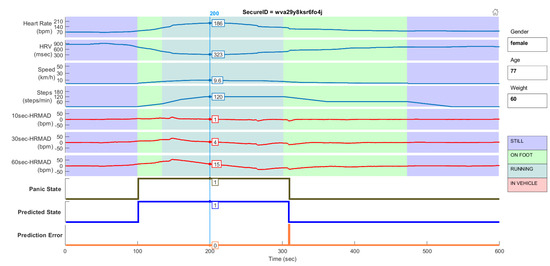
انگیزه کار حاضر استفاده از رویکرد یادگیری ماشینی برای پیشبینی موفقیت آمیز وضعیت وحشت یک موضوع بر اساس مجموعهای از ویژگیهای بیومتریک و مکانی-زمانی است که از ابزارهای پوشیدنی و تلفنهای هوشمند میآیند، با هدف نهایی ارائه مبنایی برای تجزیه و تحلیل همبستگی فضایی و زمانی داده ها در سطح جمعیت در مرحله بعدی برای نشان دادن اینکه آیا چارچوب پیشنهادی میتواند مشکل را برطرف کند یا خیر، طبقهبندی کننده SVM گاوسی با استفاده از پنج ویژگی خام ترکیب شده با دادههای HRMAD60 مشتقشده اعمال میشود. همانطور که در جدول 4 نشان داده شده است، این تنظیمات بالاترین دقت را در بین تمام طبقه بندی کننده ها نشان داده است. در مثال اول، آزمودنی (زن، 77 ساله، 60 کیلوگرم وزن) در چندین حالت تکرار میشود که از حالت ساکن شروع میشود، سپس راه میرود، میدود، دوباره راه میرود و در نهایت دوباره ثابت میایستد، همانطور که در شکل 6 نشان داده شده است. داده های بیومتریک و موقعیتی او در طول این انتقال حالت به طور قابل توجهی متفاوت است. به عنوان مثال، ضربان قلب او بین 70 تا 186، HRV از 323 تا 909، سرعت تا 9.6 و قدم های او به 120 قدم در دقیقه نزدیک می شود. مقادیر محاسبه شده HRMAD60 در محدوده 55 تا 33- هستند. در شکل 6تمام داده های بیومتریک و مکانی-زمانی برای یک لحظه خاص در 200 ثانیه به تصویر کشیده می شوند. حتی اگر مقادیر ویژگی ها به طور قابل توجهی متفاوت باشد، طبقه بندی کننده به طور دقیق وضعیت وحشت را تشخیص می دهد و تنها یک خطای ناچیز را در پایان دوره استرس نشان می دهد.
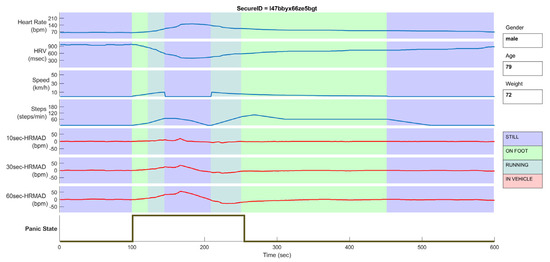
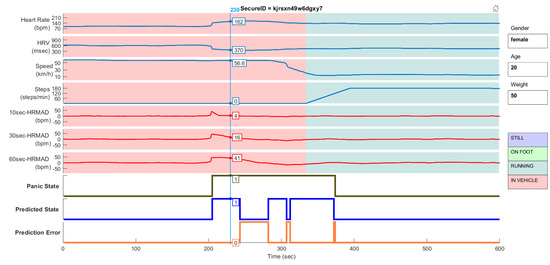
در مقابل، یک مورد اشتباه در مثال شکل 7 نشان داده شده است . این تصویر موردی را به تصویر می کشد که در آن یک سوژه مونث 20 ساله با وزن 50 کیلوگرم در یک وسیله نقلیه است که یک اتفاق ناخوشایند باعث وحشت در آن نزدیکی می شود. او مدتی به رانندگی ادامه می دهد و سپس ماشین را متوقف می کند و شروع به دویدن می کند. مقادیر ضربان قلب او بین 96 تا 168، HRV او بین 357 و 625 است، و سرعت به طور قابل توجهی از 58.3 تا 13.6 تغییر می کند در حالی که گام ها از صفر تا 180 متغیر است. مقادیر HRMAD60 محاسبه شده در محدوده 45 تا -18 است. . چندین داده بیومتریک و مکانی-زمانی را می توان در شکل 7 مشاهده کردبرای 230 ثانیه طبقه بندی کننده به درستی شروع حالت وحشت را تشخیص می دهد. با این حال، یک حالت آرام اشتباه از ثانیه های 243 تا 283 و همچنین برای مدت زمان کوتاه تری بین ثانیه های 307 تا 312 تولید می کند. در این مورد، در مقایسه با مثال قبلی، طبقه بندی کننده نتوانسته است به درستی کل مدت دوره وحشت را تشخیص دهد. اما هنوز موفق شده است آن را در بیشترین درصد شناسایی کند. این رفتار به این معنی است که، در یک سیستم تکمیل شده، چنین موردی به جای یک رویداد، سه رویداد هراس فردی متوالی را علامت گذاری می کند. بنابراین، علیرغم اینکه جسم در واقع به مدت حدود 3 دقیقه در حالت وحشت ثابت است، طبقه بندی کننده اشتباه نشان می دهد که شخص به سرعت (و حتی به طور غیرعادی) سه بار متوالی در یک بازه زمانی یکسان از حالت آرامش به حالت وحشت تغییر می کند.
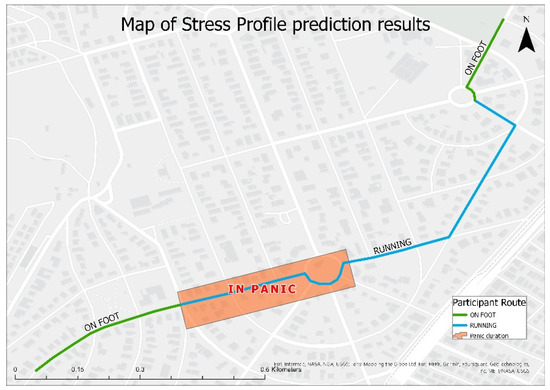
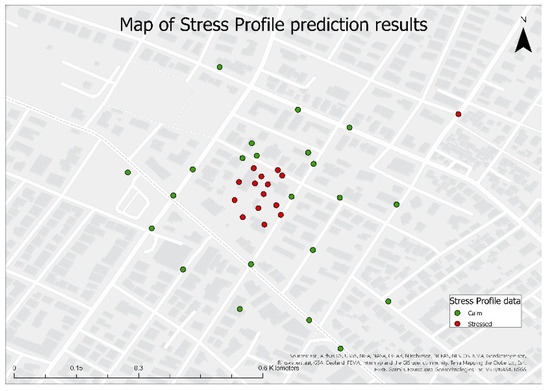
در نهایت، در شکل 8 میتوان نتیجه نقشه طبقهبندیکننده را روی مجموعهای از دادههای جدید مشاهده کرد که در آن نقاط بهترتیب با استفاده از رنگهای سبز و قرمز روی نقشه بهعنوان استرس یا آرام برچسبگذاری شدهاند.
این نتایج تجسم دو نکته را نشان می دهد. اول، یک انتخاب دقیق از دادههای بیومتریک و مکانی-زمانی خام علاوه بر ویژگیهای محاسبهشده مانند HRMAD60 پیشنهادی میتواند نتایج تمایز سطح بالایی را هنگام اعمال به یک مدل یادگیری ماشینی مناسب مانند SVM گاوسی ارائه دهد. دوم، یک طبقهبندی خوب آموزشدیده میتواند مبنای یک سیستم پیشبینی وحشت در زمان واقعی باشد. علاوه بر این، در مقیاس بزرگتر، داشتن جمعیتی که این نوع دادههای بلادرنگ را پخش میکنند، منجر به ایجاد یک نوع سیستم اطلاعاتی جمعسپاری میشود. این در حال حرکت به سمت ایجاد یک ERS هوشمند با ارجاع جغرافیایی است که می تواند برای اطلاع رسانی به مقامات در مورد یک رویداد بالقوه ناخوشایند از طریق شناسایی الگوهای احتمالی وحشت جمعیت و کمک به اقدام متناسب استفاده شود.
5. نتیجه گیری ها
در حالی که استفاده از ERS ها به طور فزاینده ای در بسیاری از جنبه های زندگی روزمره مورد استفاده قرار می گیرد، ترکیب آنها با داده های بیومتریک و مکان در زمان واقعی دیدگاه متفاوتی را ارائه می دهد. این کار تلاشی است برای معرفی روشی جدید برای تشخیص رفتارهای غیرعادی و وحشت با استفاده از این داده ها. ماهیت آن دوگانه است. اول، یک مجموعه داده جغرافیایی چندوجهی با ترکیب چندین ویژگی که به چندین فعالیت در این زمینه اشاره دارد، ایجاد شده است. مجموعه داده پیشنهادی شامل سناریوهای متفاوتی است که هر کدام شامل حالت هراس سوژه است که برای چند ثانیه رخ می دهد. مجموعه داده پیشنهادی (به صورت رایگان) تحت نسخه سوم مجوز عمومی عمومی گنو (GPL v3) از طریق پلتفرم GitHub در جامعه علمی توزیع می شود. دومین، این مجموعه داده به عنوان ورودی طبقهبندیکنندههای یادگیری ماشین عمل میکند تا با موفقیت وضعیت وحشت آزمودنی را بر اساس دادههای بیومتریک و مکانی-زمانی خام پیشبینی کند. یک مشخصه بیومتریک مشتق نیز پیشنهاد شده است که انحراف اندازهگیری ضربان قلب فعلی را در برابر میانگین متحرک ضربان قلب 10، 30 و 60 ثانیههای گذشته کمی نشان میدهد. تست های رتبه بندی اهمیت HRMAD را در میان سایر ویژگی های خام برجسته کردند. بر این اساس، نتایج تجربی نشان داد که HRMAD به طور قابلتوجهی دقت طبقهبندی مدلهای مختلف یادگیری ماشین، و همچنین شبکه عصبی بازگشتی LSTM را در زمینه یادگیری عمیق بهبود بخشید. در مورد یادگیری ماشین، بهترین نتایج طبقه بندی توسط طبقه بندی کننده SVM گاوسی گزارش شده است که به دقت 94.5 درصد می رسد. در سمت LSTM، شبکه به دقت اولیه 91 دست یافت. 52٪ با استفاده از ویژگی های خام، که بعدا با گنجاندن ویژگی پیشنهادی HRMAD به 93.42٪ بهبود یافت. آزمایشهای تجسم بیشتر نشان داد که رویکرد یادگیری ماشینی میتواند مبنایی برای یک سیستم تشخیص وحشت کارآمد باشد که میتواند در یک محیط چند کاربره مقیاسبندی شود و امکان تشخیص بلادرنگ رویدادهای احتمالی هراس جمعیت را فراهم کند. کار آینده شامل رویکردی است که در آن جریان داده های بلادرنگ برای شناسایی چنین رویدادهایی استفاده می شود. تجزیه و تحلیل مکانی-زمانی بیدرنگ، همبستگی دادههای مکانی را که بهعنوان استرسدار برچسبگذاری شدهاند، بررسی میکند و تلاش میکند تا شرایط استرس همزمان را در سطحی ازدحام نشان دهد که مناطق رویدادهای پیشبینینشدهای را که حاوی موضوعاتی با پروفایلهای استرس مشترک هستند، نشان میدهد.
منابع
- رز، دی. مورتی، اس. بروکس، جی. برایانت، جی. تکامل مدیریت اضطراری بهداشت عمومی به عنوان یک زمینه عمل. صبح. J. بهداشت عمومی 2017 ، 107 ، S126–S133. [ Google Scholar ] [ CrossRef ] [ PubMed ]
- Aguirre، BE تخلیه اضطراری، وحشت، و روانشناسی اجتماعی. روانپزشکی 2005 ، 68 ، 121-129. [ Google Scholar ] [ CrossRef ] [ PubMed ]
- برگه اطلاعات در مورد اتحادیه اروپا – 2019. 1. در دسترس آنلاین: www.europarl.europa.eu/factsheets/en (در 1 اوت 2022 قابل دسترسی است).
- بی، تی. Sankaran، S. بنیادهای طراحی سیستمهای پاسخ اضطراری جهانی (ERS). در مجموعه مقالات سومین کنفرانس بین المللی ISCRAM، نیوآرک، نیوجرسی، ایالات متحده آمریکا، 13-17 مه 2006; صص 72-81. [ Google Scholar ]
- لی، ن. سان، م. بی، ز. سو، ز. وانگ، سی. روشی جدید برای حمایت از تصمیم گیری گروهی برای سیستم های پاسخ اضطراری مبتنی بر اینترنت اشیا. Inf. سیستم جلو. 2014 ، 16 ، 953-977. [ Google Scholar ] [ CrossRef ]
- هلبینگ، دی. فرکاس، آی. ویکسک، تی. شبیه سازی ویژگی های دینامیکی وحشت فرار. طبیعت 2000 ، 407 ، 487-490. [ Google Scholar ] [ CrossRef ] [ PubMed ]
- هائو، ی. خو، ز. وانگ، جی. لیو، ی. فن، جی. رویکردی برای تشخیص رفتار هراس جمعیت با استفاده از ویژگی مبتنی بر جریان. در مجموعه مقالات بیست و دومین کنفرانس بین المللی اتوماسیون و محاسبات، کولچستر، انگلستان، 7 تا 8 سپتامبر 2016. ISBN 9781862181328. [ Google Scholar ] [ CrossRef ]
- عمار، ح. Cherif، A. DeepROD: یک رویکرد یادگیری عمیق برای تشخیص بیدرنگ و آنلاین رفتار هراس در جمعیتهای انسانی. ماخ Vis. Appl. 2021 ، 32 ، 57. [ Google Scholar ] [ CrossRef ]
- یو، ی. Si، X. هو، سی. ژانگ، جی. مروری بر شبکههای عصبی مکرر: سلولهای LSTM و معماریهای شبکه. محاسبات عصبی 2019 ، 31 ، 1235-1270. [ Google Scholar ] [ CrossRef ]
- صوفی، س. دویراحمدی، ف. فونگ، دی. رادرفورد، اس. بررسی سیستماتیک مشارکت جامعه (CE) در سیستمهای هشدار اولیه بلایا (EWS). Prog. فاجعه علمی. 2019 ، 5 ، 100058. [ Google Scholar ] [ CrossRef ]
- سازمان ملل متحد برای خطر بلایا، کاهش آمادگی بلایا برای واکنش موثر، راهنمایی و بسته شاخص برای اجرای اولویت پنج چارچوب هیوگو: چارچوب عمل هیوگو، ایجاد تاب آوری ملل و جوامع در برابر بلایا ؛ انتشارات سازمان ملل: ژنو، سوئیس، 2008; صفحات 2005–2015. [ CrossRef ]
- سازمان ملل. بررسی جهانی سیستمهای هشدار زودهنگام: ارزیابی ظرفیتها، شکافها و فرصتها برای ایجاد یک سیستم جامع هشدار اولیه جهانی برای همه مخاطرات طبیعی . گزارش جهانی؛ سازمان ملل متحد (UN): بن، آلمان، 2006. [ Google Scholar ]
- Basher, R. سیستم های هشدار اولیه جهانی برای خطرات طبیعی: سیستماتیک و مردم محور. فیلوس ترانس. R. Soc. لندن. سر. یک ریاضی فیزیک مهندس علمی 2006 ، 364 ، 2167-2182. [ Google Scholar ] [ CrossRef ]
- سازمان ملل متحد برای کاهش خطر بلایا. چارچوب سندای برای کاهش خطر بلایا 2015-2030 ؛ انتشارات سازمان ملل: ژنو، سوئیس، 2015. [ Google Scholar ] [ CrossRef ]
- لیو، جی. چن، ی. چن، ی. تحقیق مدیریت اضطراری و بلایا-تخلیه جمعیت. J. Ind. Inf. یکپارچه سازی. 2021 ، 21 ، 100191. [ Google Scholar ] [ CrossRef ]
- Li, L. زنجیره تامین آموزش در عصر صنعت 4.0. سیستم Res. رفتار علمی 2020 ، 37 ، 579-592. [ Google Scholar ] [ CrossRef ]
- لین، ی. دوان، ایکس. ژائو، سی. Xu, L. روشهای روششناسی علم سیستمها ; CRC Press: Boca Raton، FL، USA; تیلور و فرانسیس: ابینگدون، بریتانیا، 2012; شابک 978-1-4398-9551-1. [ Google Scholar ]
- Xu, L. مقدمه: علم سیستم ها در بخش های صنعتی. سیستم Res. رفتار علمی 2013 ، 30 ، 211-213. [ Google Scholar ] [ CrossRef ]
- Xu, LD سهم علم سیستم در صنعت 4.0. سیستم Res. رفتار علمی 2020 ، 37 ، 618-631. [ Google Scholar ] [ CrossRef ]
- خو، ال. کای، ال. ژائو، اس. Ge, B. سرمقاله: شماره افتتاحیه. J. Ind. Integr. مدیریت 2016 ، 1 ، 1601001. [ Google Scholar ] [ CrossRef ]
- Tsai، C.-H.; چن، پی.-سی. لیو، دی.-اس. Kuo، Y.-Y. حسیه، ت.-ت. چیانگ، دی.-ال. لای، اف. وو، سی.-تی. پیشبینی حمله پانیک با استفاده از دستگاههای پوشیدنی و یادگیری ماشینی: توسعه و مطالعه کوهورت JMIR Med. به اطلاع رساندن. 2022 , 10 , e33063. [ Google Scholar ] [ CrossRef ] [ PubMed ]
- Chair-Mase، KG; Chair-Langheinrich، MG; Chair-Gatica-Perez، DG; Chair-Gellersen، HP; Chair-Choudhury, TP; Chair-Yatani، KP در مجموعه مقالات کنفرانس مشترک بین المللی ACM در سال 2015 در مورد محاسبات فراگیر و همه جا حاضر. اوزاکا، ژاپن، 7 تا 11 سپتامبر 2015. [ CrossRef ]
- کوتساروا، وی. ماتسکین، ام. ترکیب سنجش جمعیت موبایل و دستگاههای پوشیدنی برای مدیریت موقعیتهای هشدار دهنده. در مجموعه مقالات چهل و پنجمین کنفرانس سالانه رایانهها، نرمافزارها و برنامههای کاربردی 2021 IEEE (COMPSAC)، مادرید، اسپانیا، 12 تا 16 ژوئیه 2021؛ صص 538-543. [ Google Scholar ] [ CrossRef ]
- السالات، جی. الرملی، م. علی، ع. Said, K. تشخیص وحشت انبوه با استفاده از اینترنت اشیا و یادگیری ماشین. بین المللی J. Adv. محاسبه کنید. علمی Appl. 2018 ، 9 ، 320-329. [ Google Scholar ] [ CrossRef ]
- در دسترس آنلاین: https://dictionary.cambridge.org/dictionary/english/panic (در 1 اوت 2022 قابل دسترسی است).
- لین، پی. ما، جی. Lo, S. مدل جمعیت عنصر گسسته برای تخلیه عابر پیاده از طریق خروجی. چانه. فیزیک B 2016 , 25 , 034501. [ Google Scholar ] [ CrossRef ]
- براچا، HS Freeze، پرواز، مبارزه، ترس، غش: دیدگاه های سازگارانه در مورد طیف پاسخ استرس حاد. طیف CNS 2004 ، 9 ، 679-685. [ Google Scholar ] [ CrossRef ] [ PubMed ]
- هاگ، ا. گورونزی، اس. شایچ، پ. ویلیامز، جی. تشخیص احساسات با استفاده از حسگرهای زیستی: گامهای اولیه به سمت یک سیستم خودکار. در کارگاه آموزشی و پژوهشی سیستم های گفتگوی عاطفی ; Springer: برلین/هایدلبرگ، آلمان، 2004; صص 36-48. [ Google Scholar ] [ CrossRef ]
- کندل، ای آر. شوارتز، ج.اچ. Jessell, TJ (Eds.) Principles of Neural Science , 4th ed.; McGraw-Hill: نیویورک، نیویورک، ایالات متحده آمریکا، 2000. [ Google Scholar ]
- لانگ، پی جی. بردلی، ام. Cuthbert، BN International Affective Picture System (IAPS): راهنمای دستورالعمل و رتبهبندی تأثیرگذار ؛ گزارش فنی A-5; مرکز تحقیقات در فیزیولوژی روانی، دانشگاه فلوریدا: Gainesville، FL، ایالات متحده آمریکا، 2001. [ Google Scholar ]
- گانتی، RK; بله، اف. لی، اچ. سنجش جمعیت موبایل: وضعیت فعلی و چالش های آینده. IEEE Commun. Mag. 2011 ، 49 ، 32-39. [ Google Scholar ] [ CrossRef ]
- مهتا، یو. سونی، پ. Fiaidhi، J. MobileCrowdSensing (MCS). TechRxiv توسط IEEE. 9 آوریل 2020. در دسترس آنلاین: https://doi.org/10.36227/techrxiv.12101277 (در 3 اکتبر 2022 قابل دسترسی است).
- ثاقیب، ن. پاپون، TI; احمد، من. رحمان، ع. اندازه گیری ضربان قلب با استفاده از فتوپلتیسموگرافی. در مجموعه مقالات کنفرانس بین المللی 2015 در مورد سیستم های شبکه و امنیت (NSysS)، داکا، بنگلادش، 5-7 ژانویه 2015. صص 1-6. [ Google Scholar ] [ CrossRef ]
- Nath، RK; تاپلیال، اچ. کابان هولت، ا. Mohanty، راه حل های مبتنی بر یادگیری ماشین SP برای نظارت بر استرس در زمان واقعی. مصرف IEEE الکترون. Mag. 2020 ، 9 ، 34–41. [ Google Scholar ] [ CrossRef ]
- Allen, J. Photoplethysmography و کاربرد آن در اندازه گیری فیزیولوژیکی بالینی. فیزیول. Meas. 2007 ، 28 ، R1-R39. [ Google Scholar ] [ CrossRef ]
- در دسترس آنلاین: https://www.forbes.com/health/healthy-aging/normal-heart-rate-by-age/ (در 10 اوت 2022 قابل دسترسی است).
- وب سایت مراکز کنترل بیماری. ضربان قلب هدف و حداکثر ضربان قلب تخمینی. در دسترس آنلاین: https://www.cdc.gov/physicalactivity/basics/measuring/heartrate.htm (در 10 اوت 2022 قابل دسترسی است).
- لوه، W.-Y. پنجاه سال طبقه بندی و رگرسیون درختان. بین المللی آمار Rev. 2014 , 82 , 329-348. [ Google Scholar ] [ CrossRef ]
- Hosmer، DW، Jr. لمشو، اس. Sturdivant، RX کاربردی رگرسیون لجستیک ; جان وایلی و پسران: هوبوکن، نیوجرسی، ایالات متحده آمریکا، 2013. جلد 398. [ Google Scholar ] [ CrossRef ]
- رن، جی. لی، SD; چن، ایکس. کائو، بی. چنگ، آر. Cheung، D. ساده و بی تکلف بایز طبقه بندی داده های نامشخص. در مجموعه مقالات نهمین کنفرانس بین المللی IEEE در سال 2009 در مورد داده کاوی، ساحل میامی، FL، ایالات متحده آمریکا، 6-9 دسامبر 2009. ص 944-949. [ Google Scholar ] [ CrossRef ]
- Keerthi، SS; لین، سی.-جی. رفتارهای مجانبی ماشینهای بردار پشتیبان با هسته گاوسی. محاسبات عصبی 2003 ، 15 ، 1667-1689. [ Google Scholar ] [ CrossRef ] [ PubMed ]
- الیت، جی. Leathwick، JR; Hastie, T. راهنمای کار برای درختان رگرسیون تقویت شده. J. Anim. Ecol. 2008 ، 77 ، 802-813. [ Google Scholar ] [ CrossRef ] [ PubMed ]
- چندراشکار، جی. شاهین، ف. بررسی روشهای انتخاب ویژگی. محاسبه کنید. برق مهندس 2014 ، 40 ، 16-28. [ Google Scholar ] [ CrossRef ]
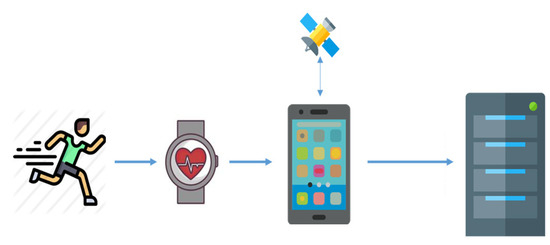
شکل 1. گردش کار سیستم.
شکل 2. نمایش نقشه مسیری که مرد شرکت کننده داده های دنیای واقعی را جمع آوری کرد.
شکل 3. داده های بیومتریک و مکانی-زمانی جمع آوری شده در طول آزمایش توسط شرکت کننده مرد.
شکل 4. سناریوی 1 مثال.
شکل 5. نمونه سناریوی 6.
شکل 6. نمونه موفقیت آمیز پیش بینی هراس.
شکل 7. مثال پیشبینی وحشت نادرست.
شکل 8. نقشه پیش بینی نیمرخ تنش از طبقه بندی کننده انتخاب شده به دست می آید.


بدون دیدگاه