1. مقدمه
نقشه ها بازنمایی انتزاعی از دنیای واقعی هستند [ 1 ]. نمادهای نقشه معنای اشیاء نقشه برداری را از طریق شکل ها و رنگ هایشان منتقل می کنند. در نقشه برداری خودکار، تشخیص و موقعیت یابی نمادها اطلاعات جغرافیایی نمادها و اطلاعات مکان ویژگی های جغرافیایی را فراهم می کند. نمادهای مختلفی برای بیان معنای اشیاء مختلف استفاده می شود و ترکیبات مختلف نمادها دنیای واقعی را به تصویر می کشند. نمادهای نقطه می توانند اشیایی را نشان دهند که در واقع در سراسر جهان به صورت نقاط، خطوط و مناطق توزیع شده اند. بنابراین، استخراج خودکار نمادهای نقطه نقشه یک فرآیند حیاتی در کارتوگرافی است [ 2]. در حال حاضر، کارتوگرافی هنوز در مرحله تعامل انسان و کامپیوتر است. درک مردم از نمادها و محیط جغرافیایی به بیان گرافیکی تبدیل می شود. از طریق طراحی، پیکربندی و پردازش روابط مربوط به نمادها، نقشه هایی با ویژگی های شناختی انسان ساخته و در رایانه ذخیره می شود. رایانهها هنوز تواناییهای شناختی و فکری انسان را ندارند و از بین بردن موانع نقشهبرداری خودکار تاکنون دشوار بوده است. در سال های اخیر با پیشرفت فناوری اطلاعات، از روش های یادگیری عمیق برای تحلیل هوشمند و استخراج اطلاعات معنایی غنی از نقشه ها استفاده شده است. به عنوان مثال، تشخیص شی [ 3 ]، تقسیم بندی معنایی [ 4 ]، و طبقه بندی تصویر [ 5 ]] اغلب برای پردازش تصویر سنجش از راه دور استفاده می شود. در حوزه اطلاعات جغرافیایی، در مقایسه، تطبیق قالب سنتی [ 6 ، 7 ] معمولا استفاده می شود. با مقایسه تصویر الگو با تصویر آزمایشی، شباهت بین این دو برای تعیین مکان هدف از پیش تعریف شده محاسبه می شود. علاوه بر این، یک روش تجزیه و تحلیل آماری [ 8 ، 9 ] برای توصیف تصاویر بافت با ضرایب مدل، یک روش تحلیل ساختاری [ 10 ، 11 ] برای تشخیص اشیاء پیچیده بر اساس ویژگیهای ساختاری تصویر، یک روش ریختشناسی ریاضی [ 12 ، 13 ، وجود دارد. 14] برای مطالعه شکل و ساختار فضایی تصویر با استفاده از تئوری مجموعه ها، و یک روش یادگیری عمیق [ 15 ، 16 ، 17 ] برای ماشین هایی برای شبیه سازی عملکرد تفکر مغز انسان، و غیره. شبکه های عصبی (DNN) [ 18 ، 19 ، 20 ] برای درک اطلاعات معنایی پیچیده نمادها تلاش می کنند، در حالی که توسعه یادگیری عمیق [ 21 ]] در زمینه گرافیک به تدریج مشکلات گرافیک سنتی را حل می کند. نمادهای تصویری پیشرفت های قابل توجهی در پرداختن به روابط پیچیده فضایی و اطلاعات معنایی ایجاد کرده اند و امکان تشخیص نماد نقطه نقشه را فراهم می کنند. این مطالعه به مطالعه نمادهای نقطه نقشه [ 22 ] اختصاص دارد]، یعنی یادگیری خصوصیات نمادها و اطلاعات معنایی مربوطه. اطلاعات صحنه در یک نقشه شهری در مقیاس بزرگ نسبتا ساده است، در حالی که اشیاء نشان داده شده توسط نمادهای نقطه ای بسیار غنی هستند. اشیاء نقطه مورد علاقه (که از این پس به عنوان POI نامیده می شود) مانند مدارس، بیمارستان ها و مراکز خرید دارای ویژگی های فعالیت انسانی فراوانی هستند که خطاهای تشخیص نماد ناشی از تداخل اطلاعات پس زمینه را کاهش می دهد. الگوریتم You Only Look Once نسخه 3 (از این پس YOLOv3 نامیده می شود) [ 23 ، 24 ] مزیت شناسایی اهداف کوچک را دارد [ 25 ، 26 ]] با توجه به عملکرد و دقت زمان واقعی. ماژول توجه را می توان برای افزایش قابلیت استخراج نماد برای مشکلاتی مانند تغییر شکل نماد در حین اسکن نقشه اضافه کرد. این الگوریتم می تواند به سرعت و با دقت دسته نماد نقطه و اطلاعات معنایی مربوطه را بر روی نقشه شهری در مقیاس بزرگ تعیین کند و تشخیص نمادهای نقطه نقشه را تکمیل کند.
الگوریتم هوش مصنوعی تعداد زیادی نمونه را برای یادگیری رنگ، بافت، شکل و سایر ویژگیهای نمادهای نقطه مختلف آموزش میدهد و رایانه را قادر میسازد نمادهای نقشه را تشخیص دهد و اطلاعات معنایی آنها را بازیابی کند. برای برنامه های کارتوگرافی، رایانه نمی تواند به طور خودکار اطلاعات مکان مکانی نمادها را به دست آورد، و پیکربندی آنها را روی نقشه دشوار می کند. امروزه، نرم افزارهای مختلف نقشه برداری [ 27 ، 28 ]، مانند ArcGIS، Adobe Illustrator و غیره امکان پیکربندی تعاملی نقشه ها را فراهم می کنند. هزینه های زمان و نیروی کار مرتبط با تعداد زیادی از تعاملات انسان و رایانه، و همچنین انحراف دقت حاصل، مانع توسعه دیجیتالی سازی نقشه و هوشمندی می شود [ 29 ]]. الگوریتم های بازپخت شبیه سازی شده مرسوم، الگوریتم های ژنتیک [ 30 ، 31 ] و الگوریتم های بازپخت شبیه سازی شده ازدحام ذرات [ 32 ] می توانند مشکل تضاد مکان بین نمادهای نقشه و حاشیه نویسی را بهتر حل کنند [ 33 ، 34 ]]، اما نمی تواند با اطلاعات معنایی آنها مطابقت داشته باشد. بنابراین، خودکارسازی کامل فرآیند از تشخیص نماد تا پیکربندی دشوار است. پیکربندی نمادهای نقطه با حاشیه نویسی که فاقد مختصات جغرافیایی دقیق است، متفاوت است. هنگام پیکربندی، آنها اولویت را برای پرداختن به همبستگی بین یکدیگر قرار می دهند. با این حال، نمادهای نقطه ای بر اساس مختصات خود در موقعیت مربوطه قرار می گیرند و پیکربندی بر مطابقت اطلاعات معنایی نمادین تأکید می کند. از آنجایی که رایانه قادر به نگاشت نمادهای نقطه و اکتساب معنایی است، تولید خودکار نمادهای نقطه می تواند تکمیل شود اگر بتواند به طور مستقل اطلاعات موقعیت فضای نماد را به دست آورد. POI با مختصات نماد نقطه و اطلاعات ویژگی آنها (نام، آدرس، دسته و غیره) مرتبط است [35 ، 36 ]. اگر دادههای POI بهدستآمده با معنای نمادهای نقشه شناسایی شده توسط کامپیوتر [ 37 ] نگاشت شوند، در این حالت، موقعیت مکانی نماد مشخص میشود و پیکربندی هوشمند نمادهای نقطه تکمیل میشود.
تشخیص و پیکربندی نماد نقطه نقشه قبلی صرفاً یک تبدیل برداری بردار از یک نقشه خاص بود، اما فرآیند برداری نقشه اغلب منجر به تحریف اطلاعات تصویر، خطاهای دقت، خطاهای اسکن و غیره میشود که مانع از نمایش دقیق نمادهای نقشه میشود. اطلاعات جغرافیایی بردارسازی سنتی نقشه دادههای شطرنجی را به دادههای برداری تبدیل میکند که نمایشی از اطلاعات کارتوگرافی در قالب برداری است. با این حال، این روش شناخت نمادهای نقشه را به دست نمیآورد و باید توسط افراد حرفهای مدیریت شود که زمانبر و محدود در کاربرد است. این مطالعه با داده های POI مرتبط است و حاوی مقدار زیادی اطلاعات ویژگی است. نمادهای نقطه به دنیای نقشه پیکربندی شده اند، و اطلاعات ویژگی موجود در آن می تواند به پزشکان مختلف در تکمیل عملیات تجزیه و تحلیل کمک کند. همچنین کار جمع آوری داده ها را کاهش می دهد، نه تنها تبدیل برداری نقشه های خاص را کاهش می دهد. در این تحقیق با به دست آوردن داده های POI برای منطقه مورد نظر و دسته بندی های مشخص شده، می توان نقشه های موضوعی با سبک های مختلف منطقه مشخص شده از جمله نقشه دریایی، نقشه حمل و نقل، نقشه گردشگری، نقشه اداری، نقشه صنعتی را پیکربندی کرد. پرسنل صنایع مختلف با توجه به نیاز خود نقشه های موضوعی ایجاد می کنند و اطلاعات بالقوه اهداف مکانی را با استفاده از تجزیه و تحلیل فضایی مانند تجزیه و تحلیل شبکه، طبقه بندی اطلاعات مکانی و تجزیه و تحلیل آماری مکانی استخراج می کنند. این مطالعه در بسیاری از زمینه ها کاربرد دارد، مانند ساخت نقشه های موضوعی و همچنین تحلیل توسعه شهری بر اساس تراکم و پراکندگی اشیاء نشان داده شده توسط نمادهای نقطه ای. علاوه بر این، برنامهریزی توسعه شهری را بر اساس تحلیل فضایی و غیره امکانپذیر میسازد. با توجه به اهمیت نقشهبرداری هوش مصنوعی در مقیاس بزرگ، این مطالعه دارای اهداف ویژه زیر است: (1) تولید مجموعه دادهای برای تشخیص نماد نقطه نقشه. (2) برای ارزیابی دقت تشخیص نماد نقطه الگوریتم مورد استفاده در این مطالعه همراه با الگوریتم مقایسه و (3) اثر تشخیص. (4) برای مرتبط کردن نمادهای نقطه نقشه با POI و به طور خودکار تطبیق آنها. با توجه به اهمیت نقشه برداری هوش مصنوعی در مقیاس بزرگ، این مطالعه دارای اهداف ویژه زیر است: (1) تولید مجموعه داده ای برای تشخیص نماد نقطه نقشه. (2) برای ارزیابی دقت تشخیص نماد نقطه الگوریتم مورد استفاده در این مطالعه همراه با الگوریتم مقایسه و (3) اثر تشخیص. (4) برای مرتبط کردن نمادهای نقطه نقشه با POI و به طور خودکار تطبیق آنها. با توجه به اهمیت نقشه برداری هوش مصنوعی در مقیاس بزرگ، این مطالعه دارای اهداف ویژه زیر است: (1) تولید مجموعه داده ای برای تشخیص نماد نقطه نقشه. (2) برای ارزیابی دقت تشخیص نماد نقطه الگوریتم مورد استفاده در این مطالعه همراه با الگوریتم مقایسه و (3) اثر تشخیص. (4) برای مرتبط کردن نمادهای نقطه نقشه با POI و به طور خودکار تطبیق آنها.
2. مواد و روشها
نمادهای نقطه در نقشه های شهر در مقیاس بزرگ به شکل منظم هستند و به طور کلی از دایره ها، مستطیل ها، حروف مختلف و حروف چینی تشکیل شده اند [ 38 ]. اینها معانی خاصی دارند [ 39 ، 40 ] و زیرساخت های مختلف شهری را نشان می دهند [ 41 ]. بنابراین تشخیص و پیکربندی نمادهای نقطه ای در نقشه شهری ضروری است. این بخش جنبه های زیر را شرح می دهد: (1) ساختار شبکه YOLOv3 برای تشخیص ماشین نمادهای نقطه نقشه. (2) روش برای بهبود دقت تشخیص نقطه نقشه. (3) پیکربندی موقعیت یابی خودکار نمادهای نقشه نقشه.
2.1. ساختار شبکه YOLOv3 برای تشخیص ماشین نمادهای نقطه نقشه
در حال حاضر، روش های یادگیری عمیق معمولا برای تشخیص نمادهای نقطه نقشه استفاده می شود. هنگام انتخاب یک مدل، نکات زیر باید با توجه به نیازهای واقعی یک موقعیت خاص برآورده شوند: ① ساختار شبکه کوچک است و مقدار کمی از حافظه را اشغال می کند. ② سرعت عملیات سریع است و الزامات زمان واقعی را برآورده می کند. ③ دقت پیشبینی بالا است [ 42 ] و تشخیص دقیق هدف حاصل میشود. ④ اثر کوچک شناسایی هدف خوب است [ 43 ]، که الزامات تشخیص نماد نقطه نقشه را برآورده می کند. با توجه به نکات ذکر شده، با در نظر گرفتن اندازه مدل، سرعت عملیات، دقت پیشبینی و اثر کوچک تشخیص هدف، میتوان از CNN برای تشخیص نماد نقطه نقشه بهتر استفاده کرد. تو فقط یک بار نگاه می کنی [44 ، 45 ، 46 ] (از این پس به عنوان YOLO نامیده می شود) یک مدل تشخیص سریع مبتنی بر یادگیری عمیق است که می تواند مستقیماً مکان و اطلاعات کلاس اهداف را در تصاویر بدست آورد. YOLOv3 یک نسخه بهبود یافته از الگوریتم YOLO است که ایده اصلی آن تقسیم تصویر ورودی به چندین شبکه معمولی است. با یادگیری ویژگی های هدف در مجموعه داده، دسته هدف و سلول شبکه ای که مرکز هدف در آن قرار دارد را تعیین می کند و در نتیجه محدوده منطقه هدف را تعیین می کند. توسعه YOLOv3 نسبتاً بالغ است و بر کاستیهای You Only Look Once Version 1 (YOLOv1) و You Only Look Once Version 2 (YOLOv2) از نظر تشخیص ناکافی اهداف کوچک غلبه میکند. بر این اساس ساختار شبکه هرمی ویژگی [47 ، 48 ] برای دستیابی به تشخیص چند مقیاسی [ 49 ] معرفی شده است. الگوریتم یک مرحلهای [ 50 ] Single Shot MultiBox Detector (از این پس SSD نامیده میشود) [ 51 ] مزیت سرعت تشخیص سریع را دارد. مفهوم اصلی استفاده از نقشههای ویژگی متعدد برای رگرسیون مکانهای هدف و طبقهبندی دستهها است. SSD دقت لازم را برای رقابت با روشهایی دارد که از مراحل پیشنهادی هدف اضافی استفاده میکنند و مشخص است که بسیار سریعتر است. یک مجموعه داده آموزشی و پیشبینی هدف برای یک چارچوب یکپارچه نیز تولید میشود. اگرچه SSD از ساختار هرمی ویژگی استفاده می کند، اما تشخیص اهداف کوچک آن کمتر رضایت بخش است. دو مرحله ای [ 52] شبکه عصبی کانولوشن مبتنی بر منطقه سریعتر (از این پس سریعتر RCNN نامیده می شود) [ 53الگوریتم ] اولین الگوریتم آشکارسازی یادگیری عمیق واقعاً سرتاسری است که در سال 2015 پیشنهاد شد. با تولید یک سری جعبههای محدودکننده نامزد به عنوان جعبههای کاندید نمونه، اهداف تصویر ورودی برای طبقهبندی توسط یک شبکه عصبی کانولوشنال پیشبینی میشوند. بزرگترین نوآوری آن کمک به شبکه پیشنهادی منطقه (RPN) و ایجاد یک جعبه نامزد (به جای جستجوی انتخابی) از طریق مکانیزم لنگر است. در نهایت، استخراج ویژگی، انتخاب قاب نامزد، رگرسیون مرزی و طبقهبندی همگی در یک شبکه ادغام شدهاند که منجر به فرآیند تشخیص دقیقتر و کارآمدتر میشود. چارچوب سریعتر RCNN، با این حال، پیچیده است، با چرخه تشخیص طولانی و عملکرد در زمان واقعی ضعیف. به عنوان یک کلاسیک از سری YOLO، YOLOv3 هم زمان واقعی و هم دقیق است و به طور گسترده در تشخیص تصویر استفاده شده است. تشخیص ویدیو، و تشخیص دوربین در زمان واقعی. علاوه بر این، به دلیل انعطاف پذیری ویژه ای که دارد، نقش مهمی در مهندسی صنایع، ردیابی ویدیویی و سایر زمینه ها مانند تشخیص میکروبی زیر آب، تشخیص علائم راهنمایی و رانندگی، تشخیص وسیله نقلیه تصویری، تشخیص چهره، تشخیص مواد معدنی و غیره ایفا می کند. از نمادهای نقطه ای، این مطالعه از الگوریتم YOLOv3 استفاده می کند که به طور گسترده در نسخه های موجود سری YOLO با نرخ کاربرد بالا استفاده شده است.
YOLOv3 از Darknet-53 [ 24 ] به عنوان شبکه اصلی خود برای استخراج ویژگی استفاده می کند. Darknet-53 شامل 53 لایه کانولوشن کاملاً متصل است و از تعداد زیادی هسته کانولوشن برای استخراج ویژگی های نماد نقطه و ساختار شبکه همانطور که در شکل 1 نشان داده شده است استفاده می کند. شبکه Darknet-53 به دو بخش تقسیم می شود: استخراج ویژگی (جعبه سبز در شکل 1 ) و پیش بینی (جعبه بنفش در شکل 1)). برای تصویر ورودی 416 × 416 × 3، استخراج ویژگی ابتدا توسط شبکه Darknet-53 انجام می شود. پیچیدگی باقیمانده در شبکه تصویر را در هم میپیچد و ارتفاع و عرض لایه ویژگی ورودی ورودی فشرده میشود تا یک لایه ویژگی ایجاد شود. این لایه ویژگی 1 × 1 و 3 × 3 پیچ خورده است و سپس روی هم قرار می گیرد تا ساختار باقیمانده را تشکیل دهد. شبکه با ادامه پیچش های 1×1 و 3×3 و برهم نهی لبه های باقیمانده عمیق تر می شود. فرآیند استخراج ویژگی شبکه Darknet-53 شامل نمونه برداری از پایین پیوسته است، جایی که ارتفاع و عرض تصویر به طور مداوم فشرده می شود، تعداد کانال ها به طور مداوم گسترش می یابد، و لایه های ویژگی به دست آمده ویژگی های تصویر ورودی را منعکس می کنند. هر پیچیدگی شبکه Darknet-53 از ساختار DarknetConv2D (از این پس DBL نامیده می شود) استفاده می کند که از Conv، Batch Normalization (از این پس BN نامیده می شود) و Leaky ReLU تشکیل شده است. Conv لایه کانولوشن است که از هسته های پیچیدگی مختلف برای پردازش نمودار و استخراج ویژگی های متمایز استفاده می کند. BN لایه نرمال سازی است که نقشه ویژگی را عادی می کند. Leaky ReLU تابع فعال سازی خطی است. DBL در شبکه استفاده می شود، هر کانولوشن منظم می شود و نرمال سازی BN و Leaky ReLU پس از تکمیل پیچیدگی انجام می شود. ساختار شبکه Darknet-53 با تعداد زیادی ساختار باقیمانده برای افزایش عمق شبکه روی هم قرار گرفته است که برای تسهیل استخراج ویژگی های معنایی سطح بالاتر شبکه استفاده می شود. همچنین از ناپدید شدن یا انفجار شیب ها جلوگیری می کند، دشواری آموزش شبکه عمیق را کاهش می دهد و دقت تشخیص را بهبود می بخشد. پس از اتمام استخراج ویژگی، پنج کانولوشن روی سه لایه ویژگی نهایی انجام می شود. پس از پیچیدگی، شاخههای نقشه ویژگیها توسط کانولوشن و نمونهبرداری روی هم چیده میشوند. یک پیچیدگی 3 × 3 و یک پیچش 1 × 1 انجام می شود و نتایج سپس برای پیش بینی طبقه بندی و پیش بینی رگرسیون به شبکه تشخیص چند مقیاسی وارد می شود. در نتیجه تصاویر ورودی به شبکه تشخیص، مختصات مرکزی و کلاس هر نماد هدف پیشبینی میشود. علاوه بر این، سه نقشه ویژگی خروجی با وضوحهای مختلف (13 × 13، 26 × 26 و 52 × 52) با پیشبینی هدف در اندازه بزرگ، متوسط و کوچک مطابقت دارند.
2.2. روشی برای بهبود دقت تشخیص نمادهای نقطه نقشه
افزودن مکانیسم توجه به شبکه می تواند استحکام تشخیص نمادهای نقطه را افزایش دهد. در یادگیری عمیق، مکانیسم توجه [ 54 ، 55 ] یک طرح تخصیص منبع است که منابع محاسباتی را به وظایف مهم تری در مورد قدرت محاسباتی محدود اختصاص می دهد و می تواند مشکل اضافه بار اطلاعات را به طور همزمان حل کند. عملکرد ضروری آن فیلتر کردن اطلاعات مفید از مقدار زیادی اطلاعات، توجه بیشتر به جزئیات هدف و سرکوب اطلاعات نامربوط است. افزودن یک ماژول توجه به شبکه می تواند به طور موثر ویژگی های هدف را برای افزایش دقت تشخیص استخراج کند. مکانیسمهای توجه متداول شامل فشار و برانگیختگی (SENet) است [ 56]، ماژول توجه فضایی [ 57 ]، توجه به خود [ 58 ]، ماژول توجه بلوک کانولوشن (که از این پس CBAM نامیده می شود) [ 59 ، 60 ]] و غیره. CBAM یک ماژول توجه شبکه عصبی کانولوشن پیشخور است که به طور متوالی ماژول توجه کانال (که از این پس CAM نامیده می شود) و ماژول توجه فضایی (از این پس SAM نامیده می شود) یکپارچه می شود. به عنوان یک ماژول سبک وزن، CBAM می تواند به طور یکپارچه در هر معماری CNN برای آموزش انتها به انتها ادغام شود. CBAM نسبت زیادی از ساختار کانولوشن در داخل ماژول ندارد، اما عمدتاً از تعداد کمی لایههای ادغام و عملیات فیوژن ویژگی تشکیل شده است. این ساختار از مقدار زیادی از محاسبات ناشی از ضرب کانولوشنی جلوگیری می کند، پیچیدگی ماژول را کاهش می دهد و تلاش محاسباتی را کاهش می دهد. CAM در CBAM بیشتر بر سطح کانال تمرکز می کند، با هدف ارائه کانال های ویژگی های مختلف با وزن های مختلف به منظور تأکید انتخابی یا نادیده گرفتن برخی ویژگی ها. SAM مناطقی را که برای کار مورد نیاز هستند شناسایی می کند و مناطق هدف را اولویت بندی می کند و به دنبال مهم ترین بخش های شبکه برای پردازش است. با قرار دادن دو ماژول توجه به نوبه خود، هر شاخه از شبکه توجه بیشتری به ویژگی های کانال ها و فضاها می کند. اطلاعات ویژگی با تقویت یا سرکوب اطلاعات ویژگی مربوطه به انتقال موثر در شبکه کمک می کند. تخصیص همزمان توجه به دو بعد، بهبود عملکرد مدل را افزایش می دهد. بنابراین CBAM در این مطالعه برای بهبود عملکرد شبکه به شبکه عصبی اضافه شده است. SAM مناطقی را که برای کار مورد نیاز هستند شناسایی می کند و مناطق هدف را اولویت بندی می کند و به دنبال مهم ترین بخش های شبکه برای پردازش است. با قرار دادن دو ماژول توجه به نوبه خود، هر شاخه از شبکه توجه بیشتری به ویژگی های کانال ها و فضاها می کند. اطلاعات ویژگی با تقویت یا سرکوب اطلاعات ویژگی مربوطه به انتقال موثر در شبکه کمک می کند. تخصیص همزمان توجه به دو بعد، بهبود عملکرد مدل را افزایش می دهد. بنابراین CBAM در این مطالعه برای بهبود عملکرد شبکه به شبکه عصبی اضافه شده است. SAM مناطقی را که برای کار مورد نیاز هستند شناسایی می کند و مناطق هدف را اولویت بندی می کند و به دنبال مهم ترین بخش های شبکه برای پردازش است. با قرار دادن دو ماژول توجه به نوبه خود، هر شاخه از شبکه توجه بیشتری به ویژگی های کانال ها و فضاها می کند. اطلاعات ویژگی با تقویت یا سرکوب اطلاعات ویژگی مربوطه به انتقال موثر در شبکه کمک می کند. تخصیص همزمان توجه به دو بعد، بهبود عملکرد مدل را افزایش می دهد. بنابراین CBAM در این مطالعه برای بهبود عملکرد شبکه به شبکه عصبی اضافه شده است. هر شاخه از شبکه توجه بیشتری به ویژگی های کانال ها و فضاها دارد. اطلاعات ویژگی با تقویت یا سرکوب اطلاعات ویژگی مربوطه به انتقال موثر در شبکه کمک می کند. تخصیص همزمان توجه به دو بعد، بهبود عملکرد مدل را افزایش می دهد. بنابراین CBAM در این مطالعه برای بهبود عملکرد شبکه به شبکه عصبی اضافه شده است. هر شاخه از شبکه توجه بیشتری به ویژگی های کانال ها و فضاها دارد. اطلاعات ویژگی با تقویت یا سرکوب اطلاعات ویژگی مربوطه به انتقال موثر در شبکه کمک می کند. تخصیص همزمان توجه به دو بعد، بهبود عملکرد مدل را افزایش می دهد. بنابراین CBAM در این مطالعه برای بهبود عملکرد شبکه به شبکه عصبی اضافه شده است.
ساختار CBAM در شکل 2 نشان داده شده است . هنگامی که نقشه ویژگی ورودی F (H × W × C) از ماژول CAM (جعبه سبز در شکل 2 ) عبور می کند، ابتدا به ترتیب از حداکثر ادغام جهانی و میانگین جهانی ادغام طول و عرض عبور می کند. دو نقشه ویژگی 1 × 1 × C با فشرده سازی در دو بعد مختلف به دست می آید. نقشه های ویژگی ادغام شده یک شبکه ادراکی چند لایه (MLP) را به اشتراک می گذارند. سپس، پس از عملیات کاهش ابعاد کانولوشنی و افزایش ابعاد، دو نقشه ویژگی روی هم قرار میگیرند. بعد از تابع سیگموئید [ 61 ، 62] فعال سازی، وزن هر کانال از نقشه ویژگی نرمال می شود. ضرب وزنهای نرمالشده در نقشه ویژگی ورودی، ویژگی بهینهسازی شده F را به دست میآورد و اجرای CAM را کامل میکند. نقشه های ویژگی بهینه شده از ماژول CAM به ماژول SAM اعمال می شود (جعبه بنفش در شکل 2). در ابتدا، نقشه ویژگی تحت حداکثر ادغام جهانی و ادغام میانگین جهانی بر اساس بعد کانال قرار می گیرد، با عملیات ادغام یک منطقه اطلاعاتی با سطوح فعال سازی بزرگ به دست می آید. در اینجا، دو نقشه ویژگی H × W × 1 به دست میآید و این نقشه ویژگی از نظر موقعیت مکانی افزایش مییابد. سپس، دو لایه از نقشه های ویژگی روی هم قرار می گیرند و از نظر ابعاد به یک نقشه ویژگی با پیچش 7 × 7 کاهش می یابند. تعداد کانال ها با استفاده از یک کانولوشن 1 × 1 تنظیم می شود و در نهایت وزن ها با استفاده از یک تابع فعال سازی Sigmoid نرمال می شوند. ضرب وزنهای نرمالشده در نقشه ویژگی ورودی، ویژگی بهینهسازی شده نهایی F’ را به دست میآورد که اجرای کل CBAM را تکمیل میکند. تابع Sigmoid یک تابع S شکل رایج در زیست شناسی است که به عنوان منحنی رشد S شکل نیز شناخته می شود. در یادگیری عمیق، به دلیل ویژگی هایی مانند عملکرد تک افزایشی و همچنین عملکرد تک افزایشی معکوس، اغلب به عنوان تابع فعال سازی شبکه های عصبی استفاده می شود. تابع فعال سازی Sigmoid شبکه های عصبی را با همگرایی و دقت نقشه برداری بالا ارائه می دهد و اغلب در لایه پنهان در مدل های CNN استفاده می شود. محدوده خروجی تابع Sigmoid بین 0 و 1 محدود است، بنابراین هر نورون را نرمال می کند و داده ها به راحتی در طول انتقال داده ها واگرا نمی شوند. برای مشکلات تغییر شکل اسکن و برهم نهی نمادها در اسکن نقشه، YOLOv3 مکانیسم توجه CBAM را معرفی می کند که باعث می شود شبکه بر اطلاعات کلیدی هدف بیشتر تأکید کند و اطلاعات ثانویه را سرکوب کند. به طور موثر ویژگی های هدف را استخراج می کند، هزینه زمانی را کاهش می دهد،63 ].
2.3. پیکربندی مکان یابی خودکار نمادهای نقشه نقشه
اطلاعات زیادی در داخل هر نماد روی نقشه وجود دارد. اگر پیکربندی نماد به سادگی نمادسازی شود [ 64 ]، معنای خود نماد از بین خواهد رفت. بنابراین، هنگام پیکربندی نمادهای نقطه [ 65]، لازم است که معناشناسی نماد را مرتبط کنیم. پیکربندی نمادهای نقطه به طور خودکار بر اساس تشخیص انجام می شود. در طول پیکربندی، نمادها به طور خودکار توسط مختصات قرار می گیرند و اطلاعات معنایی غنی را پوشش می دهند. با این حال، هنگامی که نمادهای نقطه شناسایی می شوند، اطلاعات مکان آنها قابل دستیابی نیست و پیکربندی خودکار را به چالش می کشد. داده POI حاوی اطلاعات مختصات جغرافیایی و اطلاعات ویژگی مربوطه است. برای حل مشکل اکتساب مکان مکانی با نتایج تشخیص نماد نقطه همراه است. شکل 3 فرآیند پیکربندی خودکار مکان یابی ماشین نماد نقطه نقشه را نشان می دهد. ارتباط بین نتایج تشخیص نماد نقطه و POI عمدتاً با تطبیق کلمه کلیدی انجام می شود [ 66]، و بنابراین تطبیق کلمه کلیدی مرحله کلیدی پیکربندی نماد نقطه است. عبارات منظم [ 67 ] به دلیل قدرت بیانی برتر و انعطاف پذیری توصیفی به طور گسترده در تشخیص متن استفاده می شوند و بنابراین این مطالعه از عبارات منظم برای تطبیق کلمات کلیدی استفاده می کند. علاوه بر این، خودکار محدود غیر قطعی (از این پس NFA نامیده می شود) [ 68 ] و خودکار محدود قطعی (از این پس DFA نامیده می شود) [ 69 ]] روشهای اصلی حل مسئله تطبیق عبارت منظم هستند. NFA اسناد مربوطه را بر اساس عبارات (Regex-Directed) مطابقت می دهد، در حالی که DFA عبارات منظم مربوطه را با متن (Text-Directed) مطابقت می دهد. تابع انتقال NFA ممکن است چندین حالت جانشین را تعیین کند و سرعت پردازش آن کند است. علاوه بر این، تجزیه قوانین هنگام تطبیق کلمات کلیدی، مقدار زیادی از حافظه را مصرف میکند و به طور جدی بر کارایی الگوریتم تأثیر میگذارد. تابع انتقال DFA تنها حالت جانشین منحصر به فرد را بدون در نظر گرفتن مسیرهای جایگزین و فرآیند عقب نشینی تعیین می کند. در مقایسه با NFA، زمان انتقال حالت را کاهش می دهد، سرعت تطبیق کلمات کلیدی را بهبود می بخشد و مزیت قابل توجهی در عملکرد تطبیق دارد. بر این اساس،
ارتباط نمادهای نقطه نقشه با POI در درجه اول از طریق دو مرحله انجام می شود: انتخاب کلمات کلیدی نامزد و تطبیق کلمات کلیدی. انتخاب کلمات کلیدی نامزد هنوز به خوبی تعریف نشده است و استفاده از قوانین فیلتر می تواند منجر به حذف شود. بنابراین، متون توصیفی که بیشتر ظاهر می شوند و می توانند چنین نمادهای نقطه ای را بیان کنند، به صورت دستی به عنوان کلمات نامزد انتخاب می شوند. محدودیتی در تعداد کلمات انتخابی وجود ندارد و تلاش می شود تا تمامی کلمات مرتبط با این نمادها به طور کامل در POI گنجانده شوند. این مطالعه تطبیق کلمات کلیدی را با استفاده از الگوریتم بیان منظم مبتنی بر DFA انجام می دهد. DFA از طریق یک سری رویداد از یک حالت به حالت دیگر تبدیل می شود، یعنی حالت → رویداد → حالت. اصل DFA این است که هر عنصر در یک مجموعه محدود دارای دو حالت ادامه و پایان است. طبق اصل DFA هدف از این کار بازیابی عناصر به صورت متوالی تا رسیدن به حالت پایانی است. مراحل اصلی در تطبیق کلمات کلیدی مبتنی بر DFA عبارتند از: ابتدا NFA را بسازید که به عنوان پایه ای برای ساخت DFA عمل می کند. سپس، موتور NFA از یک الگوریتم عقبگرد تطبیق به اصطلاح حریص استفاده میکند که اولین تطابق را پس از آزمایش تمام پسوندهای ممکن عبارت منظم به ترتیب مشخص میپذیرد. NFA در مرحله بعد چندین بار دقیقاً به همان حالت دسترسی پیدا می کند، یعنی زمانی که با متن بی همتا مواجه می شود، مکرراً به عقب برمی گردد و روند تطبیق را تا زمانی که موفق شود یا همه متن ها مطابقت نداشته باشند، تکرار می کند. NFA این مزیت را دارد که پسوندهای خاصی از عبارات منظم را ایجاد می کند که تطابق زیر عبارات و تطبیق مراجع پشتیبان را به تصویر می کشد. هنگامی که NFA متنی را که باید مطابقت داده شود، طی می کند، مجموعه ای از حالت های فعال برای حالت ها و ورودی های تعیین شده فعال می شود. DFA یک نگاشت تک مقداری است، یعنی برای یک حالت خاص، تنها یک انتقال حالت برای هر ورودی وجود دارد. بنابراین، DFA یک حالت قطعی منحصر به فرد در این مجموعه حالت تعریف می کند و وضعیت فعلی DFA با مجموعه حالت های فعال فعلی توسط NFA مطابقت دارد. وقتی DFA تطبیق را انجام میدهد، با حالت اولیه شروع میشود، متنی را که باید مطابقت داده شود بهطور متوالی میخواند، و پرش کاراکتر را برای مطابقت با کلمات کلیدی نامزد انجام میدهد. در پایان هر پرش، تعیین می کند که آیا وضعیت فعلی پذیرفته شده است یا خیر. اگر ایالت پذیرفته شود، مسابقه موفقیت آمیز است. در غیر این صورت، انتقال وضعیت تا زمانی که تمام مسابقات تکمیل شود ادامه می یابد. در نهایت، تمام اطلاعات تطبیق خروجی است. قوانین تطبیق کلمات کلیدی مبتنی بر DFA در الگوریتم 1 نشان داده شده است.
| الگوریتم 1: قوانین تطبیق کلمات کلیدی مبتنی بر DFA. |
| ورودی: کلمات کلیدی نامزد A = {آ1،آ2،…،آn}, POI to Be Matched T |
| مرحله 1 : مجموعه نتایج R را مقداردهی کنید. |
| مرحله 2: ساخت NFA. |
| مرحله 3: NFA مورد T را که باید مطابقت داده شود، عبور می دهد و مجموعه حالت فعال را فعال می کند. |
مرحله 4: کاراکترها را در T بخوانید و بپرید، همه کلمات کلیدی در A را مطابقت دهید و بررسی کنید که آیا
وضعیت پذیرفته شده است یا خیر. |
مرحله 5: اگر مسابقه موفقیت آمیز باشد، نتیجه در R 1 ذخیره می شود و مطابقت متن بعدی
انجام می شود. |
| مرحله 6: تمام مسابقات تکمیل می شود و مجموعه R برگردانده می شود. |
| خروجی: مجموعه نتایج R |
3. آزمایشات
این مطالعه الگوریتم این مطالعه را با سایر الگوریتمها با استفاده از مجموعه داده برچسبگذاری شده مقایسه میکند. اثر تشخیص نمادهای نقطه نقشه برای ارزیابی کارایی الگوریتم پیشنهادی در این مطالعه آزمایش شده است. با تطبیق POI خزیده شده با نماد نقطه نقشه، در نقشه پیکربندی می شود. این بخش داده های آزمایشی، تشخیص ماشین نمادهای نقطه نقشه و پیکربندی محلی سازی خودکار نمادهای نقطه نقشه را ارائه می دهد.
3.1. داده های تجربی
3.1.1. نمادهای نقطه نمونه مجموعه داده
در این تحقیق، سه سبک مختلف از اطلس های استانی چین مورد بررسی قرار گرفته است و یک نوع نماد نقطه لزوماً اطلاعات یکسانی را نشان نمی دهد. نمادهای نقطه با استفاده از یک اسکنر به دست آمد و با فرمت استاندارد مجموعه داده های تشخیص هدف PASCAL VOC [ 70 ] علامت گذاری شد. LabelImg برای علامت گذاری قاب بیرونی نمادهای هدف استفاده می شود. در مجموع 6675 تصویر وجود دارد، 12 نوع نماد معمولاً مورد استفاده قرار می گیرد، و تعداد نمادهای علامت برای هر تصویر بین 1 تا 11 متغیر است. نام نمادهای نقطه نشان داده شده عبارتند از مدرسه، بیمارستان، بازار، بخش دولتی، ایستگاه اتوبوس، کوه، اداره پست، بندر، عمارت، بانک، PSB و هتل. شکل 4تعداد نمادهای نقطه برچسب گذاری شده برای هر نوع را نشان می دهد. فایل XML که پس از برچسبگذاری تولید میشود شامل دسته نماد برچسبدار (نام دسته) و همچنین مختصات صفحه (مختصات گوشه سمت چپ بالای کادر برچسبگذاری شده) است. ایکسمترمنn، Yمترمنn) و مختصات گوشه پایین سمت راست ( ایکسمترآایکس، Yمترآایکس)).
مجموعه داده به مجموعه آموزشی، مجموعه اعتبار سنجی و مجموعه تست تقسیم می شود. 15484 جعبه برچسب گذاری شده در مجموعه داده وجود دارد. جدول 1 تقسیم بندی دقیق مجموعه داده را نشان می دهد. در فرآیند تشخیص هدف، پدیده بیش از حد برازش [ 71 ، 72] اغلب اتفاق میافتد، که در آن اثر تشخیص روی مجموعه آموزشی خوب است، در حالی که عملکرد در مجموعه تست ضعیف است. دلیل اصلی توسعه این وضعیت این است که نمونه های آموزشی کوچک هستند یا تداخل نویز وجود دارد. نمادهای نقطه نقشه اشکال منظم با سبک های خاص هستند و کمتر تحت تأثیر اطلاعات پس زمینه قرار می گیرند، و نویز کمتری به استخراج نماد نقطه کمک می کند تا خطاهای تشخیص را کاهش دهد. در عین حال، حجم داده های این مطالعه زیاد است و هر نوع نماد در مجموعه داده ها در دسته های بزرگ برچسب گذاری شده است. نمونه های انتخاب شده به اندازه کافی معرف هستند و جعبه های دارای برچسب نمونه کاملاً نمادهای هدف را پوشش می دهند و دقیقاً برچسب گذاری شده اند. حجم زیاد داده ابزار اصلی برای جلوگیری از برازش بیش از حد مدل است.73 ، 74 ، 75 ] از طریق مقیاسبندی تصویر، ورق زدن، و اعوجاج طیف رنگ. داده های نمونه برای هر جلسه تمرینی یکسان نیستند تا احتمال اضافه برازش کاهش یابد. این به عنوان مجموعه داده برای تشخیص نماد نقطه استفاده می شود، و بهبود داده ها تنها تصاویر پیشرفته جدیدی را در طول آموزش بدون افزایش مقدار داده تولید می کند، بنابراین فضای ذخیره سازی را کاهش می دهد.
3.1.2. مجموعه داده POI
با استفاده از فناوری خزنده برای به دست آوردن داده های POI برای تحقیق روی نقشه خودکار ناوی، منطقه انتخاب شده برای این پارک کالج Longzihu، منطقه Jinshui، شهر ژنگژو، استان هنان است. از آنجایی که این منطقه حاوی اطلاعات مدارس و مناطق تجاری متعددی است که در زمینه های بسیاری مانند تجارت، حمل و نقل، مراقبت های بهداشتی، آموزشی و غیره نقش دارند و نمادهای نقطه نقشه مربوطه نیز غنی هستند، از این منطقه برای مطالعه پیکربندی نمادهای نقطه استفاده می شود. فیلدهای به دست آمده شامل نام، شناسه، نوع، نوع کد، نام، نام شهر، نام، آدرس، کد پیسی، کد شهر، کد تبلیغاتی، x و y است. از آنجایی که انواع بسیار زیادی از داده های POI به دست آمده است، و اکثر آنها فاقد معنای طبقه بندی خاصی برای نمادهای نقطه پیکربندی شده هستند، تنها انواع POI مربوط به نمادهای نقطه شناسایی شده طبقه بندی می شوند، همانطور که در گزارش گزارش شده است.جدول 2 .
ما POI بهدستآمده را پاک میکنیم (پردازش مقادیر گمشده، حذف مقادیر پرت و شدید، تصحیح، بررسی، و غیره)، و POIها را با اطلاعات ویژگی کامل فیلتر میکنیم. 615 داده POI معتبر در 9 دسته وجود دارد که با نمادهای نقطه شناخته شده در ناحیه خزیده مرتبط هستند. GCJ-02 با تعریف طرح ریزی به سیستم جهانی ژئودتیک 1984 (WGS84) تبدیل می شود.
3.2. نمادهای نقطه نقشه تشخیص ماشین
3.2.1. معیارهای ارزیابی
در این مطالعه، عملکرد الگوریتم به صورت کمی با استفاده از 3 معیار ارزیابی شد: یادآوری، دقت، و میانگین دقت متوسط (از این پس به عنوان mAP نامیده میشود) [ 72 ]. از فرمول های زیر برای محاسبه یادآوری و دقت استفاده می شود:
که در آن TP تعداد جعبه های Ground Truth را نشان می دهد که زمانی که سطح اطمینان بیشتر از آستانه تعیین شده است شناسایی می شوند. FP تعداد جعبه های Ground Truth را نشان می دهد که زمانی که سطح اطمینان کمتر از آستانه تعیین شده است شناسایی می شود. و FN تعداد جعبه های Ground Truth شناسایی نشده را نشان می دهد.
mAP بر اساس فراخوانی و دقت به دست می آید و میانگین مقدار میانگین دقت هدف (از این پس به عنوان AP نامیده می شود) همه دسته ها است. AP ناحیه محصور شده در زیر منحنی فراخوانی دقیق است و هر چه ناحیه نشان داده شده بزرگتر باشد، دقت بالاتری دارد. با ترکیب این دو پارامتر برای اندازه گیری عملکرد شبکه، mAP به صورت زیر محاسبه می شود:
که در آن AP میانگین دقت تشخیص هر نوع هدف را نشان می دهد و N نشان دهنده تعداد کل دسته های شناسایی شده است.
3.2.2. مقایسه مدل و تحلیل تجربی
به منظور بررسی اثربخشی الگوریتم YOLOv3 پیشنهادی با مکانیسم توجه CBAM، این مطالعه آزمایشهایی را انجام میدهد. علاوه بر این، تأثیر مکانیسم توجه CBAM بر عملکرد الگوریتم تشخیص شی در همان محیط آزمایشی ارزیابی میشود. در این آزمایش، Python3.6.4 (Guido van Rossum، هلندی)، Pytorch1.7.0 (Facebook AI Research، CA، ایالات متحده آمریکا) و Cuda11.6 (NVIDIA، CA، USA) روی Ubuntu18.04.6 (مارک شاتلورث، سیستم آفریقای جنوبی). این مدل بر روی یک پردازنده گرافیکی NVIDIA GeForce RTX 3060 (NVIDIA, CA, USA) اجرا می شود و نتایج آموزش 100 بار در شکل 5 و جدول 3 نشان داده شده است.
نمودارهای تجربی مقادیر دقت، نرخ فراخوان و mAP برای الگوریتم اصلی YOLOv3 و الگوریتم پیشنهادی در این مطالعه در شکل 5 نشان داده شده است و مقادیر هر متریک در جدول 3 نشان داده شده است. در مقایسه با الگوریتم اصلی، مقدار mAP روش پیشنهادی بهبود یافته است و دقت و یادآوری نیز نسبت به الگوریتم اصلی YOLOv3 برتری دارد. از جدول 3 نیز قابل مشاهده استکه مقدار mAP روش پیشنهادی 0.55٪ بیشتر از الگوریتم اصلی است و به 99.36٪ می رسد و دقت و فراخوان نیز به ترتیب 0.36٪ و 0.63٪ افزایش می یابد. برتری هر یک از پارامترهای الگوریتم پیشنهادی در این مطالعه در مقایسه با الگوریتم اصلی نشان میدهد که این الگوریتم میتواند به طور موثری تشخیص نمادهای نقطه نقشه را بهبود بخشد.
برای برجسته کردن مزایای الگوریتم ارائه شده در این مطالعه برای تشخیص نمادهای نقطه، روش پیشنهادی با دیگر شبکههای یادگیری عمیق جریان اصلی، از جمله مدلهای SSD و مدلهای سریعتر RCNN مقایسه میشود. SSD از شبکه سبک وزن MobileNetV2 استفاده می کند که اندازه کوچکی دارد، میزان محاسبات را کاهش می دهد و در زمان و هزینه صرفه جویی می کند. RCNN سریعتر VGG16 را با یک شبکه عمیق تر کار می کند که عملکرد تعمیم خوبی دارد و به یادگیری ویژگی های هدف کمک می کند. نتایج تجربی در جدول 4 ارائه شده است.
از جدول 4 قابل مشاهده استکه نرخ انتقال روش پیشنهادی بین RCNN سریعتر و SSD قرار می گیرد. به عنوان یک الگوریتم یک مرحله ای، بیشتر از الگوریتم دو مرحله ای، یعنی RCNN سریعتر، زمان واقعی تر است. با این حال، شکاف قابل توجهی در مقایسه با الگوریتم SSD برای شبکه های سبک وزن وجود دارد. علاوه بر این، روش پیشنهادی در این مطالعه از نظر دقت و مقدار mAP برتری قابل توجهی نسبت به سایر الگوریتمها دارد. اگرچه نرخ فراخوان 0.22% کمتر از Faster RCNN است، 99.72% هنوز به دست می آید. دقت RCNN سریعتر تنها 91.29 درصد است که 5.77 درصد کمتر از روش پیشنهادی در این مطالعه است. علاوه بر این، روش پیشنهادی در این مطالعه برتری قابل توجهی را نسبت به SSD از نظر دقت، یادآوری و مقدار mAP نشان میدهد. در مقابل، الگوریتم ارائه شده در این مطالعه مزایای بیشتری را ارائه می دهد، موثرتر است،
3.2.3. نتایج تجسم
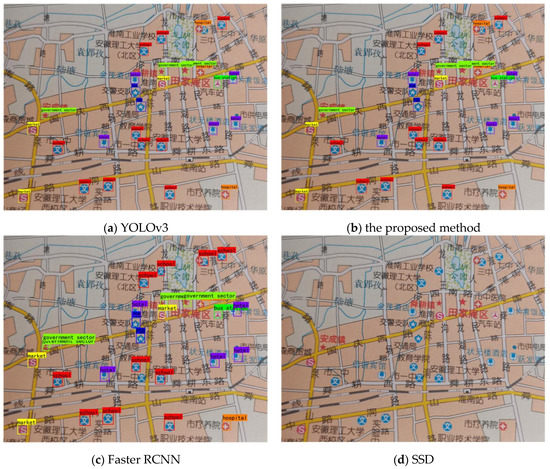
میدان دریافتی در یادگیری عمیق، محدوده دریافت نورون های مختلف در یک شبکه را به تصویر نشان می دهد. هنگامی که ارزش میدان دریافتی بسیار زیاد است، می توان به محدوده تصویر گسترده ای دسترسی داشت و ویژگی هایی با سطوح معنایی بالاتر را می توان به دست آورد. با این حال، برعکس، ویژگیهای گنجانده شده بیشتر محلی و جزئیات هستند. برای نقشه ای در مقیاس یکسان، فاصله بین چشم انسان و نقشه محدوده ادراک بصری متفاوتی ایجاد می کند و بنابراین اندازه هدف تغییر می کند و جلوه های نقشه خوانی متفاوتی ایجاد می کند. به طور مشابه، تغییرات ادراک مرئی ایجاد شده توسط رایانه تحت تأثیر فاصله بصری قرار می گیرد و بر نتایج تشخیص تأثیر می گذارد. این مطالعه از چهار مدل برای شناسایی نقشههای با سبکهای مختلف استفاده میکند. در این بخش، از منظر کیفی،شکل 6 و شکل 7 .
از شکل 6 می توان دید که مدل (ب) در تشخیص نمادهای نقطه ای در ناحیه هدف از سایر مدل ها بهتر عمل می کند و می تواند نمادهایی را که باید شناسایی شوند کاملاً تشخیص دهد. در مقابل، هر دو (a) و (c) دارای تشخیص های نادرست هستند، مانند تشخیص های از دست رفته، تغییر موقعیت و تشخیص های مکرر. علاوه بر این، (d) نمادها را در این فاصله بصری تشخیص نمی دهد و بدترین اثر را دارد.
از شکل 7 مشاهده می شود که هنگام تشخیص نمادهای هدف بزرگ و واضح، (الف، ب) به درستی همه نمادها را در منطقه تشخیص هدف با تشخیص موقعیت دقیق تشخیص می دهد. در مقایسه با انحراف موقعیت نماد در (ج) (به عنوان مثال، موقعیت نماد “هتل لانکای” با انحراف زیاد) و تشخیص اشتباه نماد در (د) (نماد نشان دهنده “بیمارستان شهر هشت”)، (الف، ب) در این فاصله بصری اثر تشخیص برتری دارد. یعنی (a,b) در این فاصله بصری بهتر است.
به طور کلی، در این دو سبک مختلف و فواصل بصری مختلف تشخیص نماد نقطه نقشه، روش پیشنهادی بدون توجه به اندازه نماد هدف، مزایای آشکاری نسبت به سایر الگوریتمها دارد. از آنجایی که روش پیشنهادی ما ماژول توجه CBAM را اضافه می کند، ماژول توجه SAM و ماژول توجه CAM را ادغام می کند تا شبکه استخراج ویژگی توجه بیشتری به ویژگی های خود هدف داشته باشد، اطلاعات غیر مهم را نادیده بگیرد و توانایی استخراج ویژگی های جهانی را بهبود بخشد. در نتیجه شناسایی هدف کوچک را تقویت می کند. به طور کلی، روش پیشنهادی ما دقت بالایی در تشخیص نمادهای نقطه نقشه دارد و نمادهای نقطه ای شناسایی شده توسط این روش می توانند برای پیکربندی نمادهای بعدی استفاده شوند.
3.3. نمادهای نقطه نقشه پیکربندی محلی سازی خودکار ماشین
3.3.1. تطبیق نمادهای نقطه با POI
پیکربندی خودکار نمادهای نقطه نقشه یک گام اساسی برای تحقق هوشمندی نقشه برداری است. با تبدیل اطلاعات روی نقشه های کاغذی یا نقشه های دیجیتال به یک سری مقادیر مشخصه که رایانه ها می توانند ذخیره و دستکاری کنند، پشتیبانی از داده ها را برای عملیات هایی مانند تجزیه و تحلیل فضایی فراهم می کند.
رابط AutoNavi API برای خزیدن POI در پارک کالج Longzihu، منطقه Jinshui، شهر Zhengzhou، استان هنان استفاده می شود. داده های خزیده شده نه تنها شامل انواع مرتبط با نمادهای نقطه آموخته شده، بلکه تعداد زیادی از انواع داده ها بدون اطلاعات معنایی است. همه این داده ها نمی توانند با نمادهای نقطه مرتبط شوند و روی نقشه پیکربندی شوند. بنابراین، تطبیق طبقه بندی کلمات کلیدی برای فیلتر کردن داده های مرتبط و ترکیب با نمادهای نقطه برای تکمیل پیکربندی مورد نیاز است.
هنگام انجام تطبیق کلمه کلیدی، فیلد تطبیق با میزان ارتباط با نام نماد تعیین می شود، مانند {name: Boxue Road Police Station; شناسه: B0FFG9W5HA; نوع: سازمان های دولتی و گروه های اجتماعی؛ آژانس های امنیت عمومی؛ پلیس امنیت عمومی؛ کد تایپ: 130501; pname: استان هنان; نام شهر: ژنگژو نام: منطقه Jinshui; آدرس: 200 متر شرق تقاطع جاده Jinshui East و Boxue Road. pcode: 410000; کد شهر: 371; کد آگهی: 410105; x: 113.802418; y: 34.775305} یا { name: NEW Zealand; شناسه: B0FFGG7SP4; نوع: اقامتگاه تجاری; ساختمان؛ ساختمان اداری تجاری؛ نوع کد: 120201;pname: استان هنان; نام شهر: ژنگژو نام: منطقه Jinshui; آدرس: شمال شرقی جاده کمربندی Huxin و Huxin 2nd Road angular; pcode: 410000; کد شهر: 371; کد آگهی: 410105; x: 113.803559; y: 34. 796053}، دو داده POI. استخراج کلمات کلیدی فقط از قسمت “نام” نمی تواند همه انواع POI را پوشش دهد و ممکن است برخی از آنها نادیده گرفته شوند. فیلد “نوع” نوع هر POI را نشان می دهد. برای مطابقت، می توانید یک یا چند کلمه کلیدی مرتبط با نمادهای نقطه را از این قسمت انتخاب کنید. در نقشه های انواع مختلف، نمادها متفاوت هستند. در نقشه هایی با سبک های مختلف نقشه برداری اما انواع مشابه، نمادها دقیقاً یکسان نیستند. بنابراین، بر اساس نمادهای نقطه ای شناخته شده، می توان انواع نمادها را با یک سبک مشترک برای پیکربندی نقشه انتخاب کرد که در نتیجه یک جلوه نقشه برداری یکنواخت و زیبا ایجاد می شود. کلمات کلیدی انتخاب شده و سبک نمادها در گزارش شده است می توانید یک یا چند کلمه کلیدی مرتبط با نمادهای نقطه را از این قسمت انتخاب کنید. در نقشه های انواع مختلف، نمادها متفاوت هستند. در نقشه هایی با سبک های مختلف نقشه برداری اما انواع مشابه، نمادها دقیقاً یکسان نیستند. بنابراین، بر اساس نمادهای نقطه ای شناخته شده، می توان انواع نمادها را با یک سبک مشترک برای پیکربندی نقشه انتخاب کرد که در نتیجه یک جلوه نقشه برداری یکنواخت و زیبا ایجاد می شود. کلمات کلیدی انتخاب شده و سبک نمادها در گزارش شده است می توانید یک یا چند کلمه کلیدی مرتبط با نمادهای نقطه را از این قسمت انتخاب کنید. در نقشه های انواع مختلف، نمادها متفاوت هستند. در نقشه هایی با سبک های مختلف نقشه برداری اما انواع مشابه، نمادها دقیقاً یکسان نیستند. بنابراین، بر اساس نمادهای نقطه ای شناخته شده، می توان انواع نمادها را با یک سبک مشترک برای پیکربندی نقشه انتخاب کرد که در نتیجه یک جلوه نقشه برداری یکنواخت و زیبا ایجاد می شود. کلمات کلیدی انتخاب شده و سبک نمادها در گزارش شده است در نتیجه یک جلوه نقشه برداری یکنواخت و زیبا ایجاد می شود. کلمات کلیدی انتخاب شده و سبک نمادها در گزارش شده است در نتیجه یک جلوه نقشه برداری یکنواخت و زیبا ایجاد می شود. کلمات کلیدی انتخاب شده و سبک نمادها در گزارش شده استجدول 5 .
عبارات منظم برای فیلتر کردن کاراکترهای از پیش تعریف شده، انتخاب کلمات کلیدی بالا به عنوان اشیاء منطبق و مطابقت کلمات کلیدی بر اساس DFA استفاده می شود. کلمات کلیدی نامزد شامل حروف، اعداد، حروف چینی است. هیچ الزامی برای طول کلمات کلیدی نامزد وجود ندارد، اما کلمات کلیدی بیش از حد طولانی یا چندگانه ممکن است بر کارایی تطبیق تأثیر بگذارد. از آنجایی که هر نوع نماد مربوط به یک یا چند کلمه کلیدی است، یک رابطه یک به یک یا چند به یک بین POIهایی که با کلمات کلیدی مطابقت دارند وجود دارد. هر POI همه کلمات کلیدی موجود در الگو را یک به یک مطابقت می دهد تا طبقه بندی که POI به آن تعلق دارد مشخص شود. همه دادههای POI مطابق طبقهبندی میشوند و ویژگیهای POI به معنای نمادهای نقطه دسته مربوطه اضافه میشوند، در نتیجه تطبیق بین نمادهای نقطهدار و POI تکمیل میشود.
3.3.2. نمادهای نقطه پیکربندی موقعیت یابی خودکار ماشین
نقشه شهر نمای اولیه شهر و امکانات مختلف با شهر را به عنوان محدوده منعکس می کند. دقت و زیبایی شناسی نمادهای نقطه ای در نقشه شهر بر دقت و خوانایی نقشه تأثیر می گذارد. بنابراین، این مطالعه پیکربندی خودکار نمادهای نقطه را بر اساس تشخیص محقق می کند. از آنجایی که کلمات کلیدی نامزد با نمادهای نقطه مرتبط هستند، POIهایی که با موفقیت تطبیق داده شده اند از همان نوع نمادهای نقطه ای مرتبط با کلمات نامزد هستند. علاوه بر این، اطلاعات ویژگی POI (نام، آدرس، مختصات جغرافیایی، کد پستی شهر و سایر اطلاعات موجود در داده های POI) به معنای این نمادها اضافه می شود. بنابراین، نمادهای نقطه دارای اطلاعات معنایی نتیجه شناسایی و همچنین اطلاعات ویژگی POI منطبق هستند.76 ، 77 ]. موقعیت یابی خودکار با تطبیق مختصات جغرافیایی، تطبیق سبک های نماد مربوطه بر اساس دسته بندی نمادها، و نمایش اطلاعات ویژگی موجود در POI انجام می شود، بنابراین پیکربندی خودکار مکان نمادهای نقطه را تکمیل می کند. این مطالعه یک اسکریپت را از طریق Visual Studio Code توسعه میدهد، مسیر دسترسی برای Cesium را مشخص میکند، و نمادهای نقطه پیکربندی را در ترکیب با سرویس Map World تکمیل میکند. بارگیری نقشه جهان بر روی سزیوم مشکل ثبت مختصات جغرافیایی را حل میکند و تصاویر و حاشیهنویسیهایی که با نقشه جهان ارائه میشوند میتوانند جلوه نمایش نقشه را پس از پیکربندی نمادهای نقطه غنیتر کنند.
شکل 8 نتیجه پیکربندی نماد نقطه را روی تصویر Map World و نقشه پایه برداری را نشان می دهد. از آنجایی که نمادهای نقطه انتخاب شده اشکال منظمی هستند، سبک های نماد بر روی مختصات جغرافیایی داده های POI مربوط به نقطه مرکزی نمایش داده می شوند. در کاربردهای عملی، به منظور تأکید بر انواع خاصی از نمادها یا نشان دادن ویژگیهای سلسله مراتبی، معمولاً نمادهای دستههای مختلف در اندازههای متفاوتی هستند. این مطالعه اندازه نمادهای یکنواخت را برای نمادهای نقطه ای تنظیم می کند اما پیکربندی نمادهای با اندازه متغیر را مجاز می کند. اندازه نمادها از یک نوع نیز می تواند به طور مستقل برای بیان ویژگی های مختلف تنظیم شود. همانطور که در شکل 9 نشان داده شده است، اطلاعات ویژگی با بارگذاری فیلدهای مربوطه در نماد نوع مربوطه ذخیره می شود: نام، نوع، آدرس، نام pname، نام شهر، نام adname، pcode، شهر کد و کد تبلیغاتی. پس از این، پرس و جو اطلاعات ویژگی انجام می شود. این روش برای پیکربندی نمادهای نقطه نقشه استفاده میشود، که به طور کامل پیکربندی بیدرنگ نمادهای نقاط شناسایی شده متعدد را در حین بزرگنمایی، کوچکنمایی و رومینگ برآورده میکند. از آنجایی که از مختصات طول و عرض جغرافیایی برای مکان یابی نمادهای نقطه استفاده می کند، می توان از آن در پیکربندی نمادهای نقطه نقشه منطقه ای استفاده کرد. علاوه بر این، اگر داده های POI بیشتری به دست آید، داده های اضافی را می توان از طریق اطلاعات مختصات برای غنی سازی نقشه پیکربندی شده اضافه کرد. از آنجایی که داده های POI را می توان در انواع مختلفی با توجه به لیست کد طبقه بندی POI به دست آورد، امکان ایجاد نقشه های موضوعی تنها با یک یا چند نوع نماد وجود دارد. می تواند توزیع جغرافیایی فضایی، کمیت و ساختار فضایی اشیاء نقشه برداری شده را به صورت بصری نمایش دهد و در نتیجه نمایش گرافیکی آنها را تکمیل کند.
4. نتیجه گیری
برای تشخیص و پیکربندی کارآمد نمادهای نقطه در نقشهها، این مطالعه یک روش نقشهبرداری دو مرحلهای را پیشنهاد میکند که به طور هوشمند نمادهای نقطهای را شناسایی و سپس آنها را پیکربندی میکند. بر اساس الگوریتم YOLOv3، از یک طرف، مکانیسم توجه CBAM در ابتدا به مدل شبکه اضافه میشود. ماژول CBAM تعداد کانولوشن های زیادی ندارد و دارای تعداد کمی لایه های ادغام و ساختارهای همجوشی است. از تعداد زیادی محاسبات ناشی از ضرب کانولوشن جلوگیری می کند، پیچیدگی ماژول را کاهش می دهد و میزان محاسبه را کاهش می دهد. در عین حال، دو بعد تحلیل، توجه فضایی و توجه کانال، به منظور تحقق ساختار توجه متوالی از کانالی به فضا معرفی میشوند. از این رو، الگوریتم به گونه ای بهینه شده است که شبکه توجه بیشتری به جزئیات هدف داشته باشد، اطلاعات نامربوط را سرکوب کند، به طور موثر ویژگی های هدف را استخراج کند و از مشکل بیش از حد برازش جلوگیری کند. از سوی دیگر، مجموعه دادهها از طریق افزایش دادهها گسترش مییابد تا از دادههای آموزش الگوریتم کافی اطمینان حاصل شود، در نتیجه دقت تشخیص نماد را افزایش میدهد و پشتیبانی دادهها را برای پیکربندی نمادهای بعدی فراهم میکند. در مقایسه با الگوریتم اصلی، الگوریتم پیشنهادی در این مطالعه در تشخیص نمادهای نقطه نقشه دقیقتر بود و mAP 0.55٪ بهبود یافت. در مقایسه با الگوریتم کلاسیک SSD و الگوریتم Faster RCNN، مقادیر دقت، فراخوانی و mAP این الگوریتم عالی است و به ترتیب به 97.06، 99.72 و 99.50 درصد می رسد. نمادهای نقطه نقشه یک پیکربندی خودکار مبتنی بر تشخیص را تکمیل می کنند. نتیجه تشخیص نمادهای نقطه شامل سبک نماد و اطلاعات معنایی است. با POI ترکیب می شود تا اطلاعات مکان مکانی را به دست آورد تا موقعیت یابی و پیکربندی خودکار نمادهای نقطه را محقق کند. تطبیق کلمه کلیدی با انتخاب کلمات کلیدی و فیلد مربوطه POI انجام می شود. از آنجایی که کلمات کلیدی انتخاب شده با نمادهای نقطه مرتبط هستند، یک تطابق موفق از همان نوع نماد نقطه مرتبط در نظر گرفته می شود. اطلاعات ویژگی POI به اطلاعات معنایی نمادهای نقطه مربوطه اضافه می شود تا مطابقت هر دسته از نمادهای نقطه تکمیل شود. نمادهای نقطه منطبق دارای اطلاعات معنایی در مورد تشخیص نماد و همچنین اطلاعات ویژگی غنی در POI هستند. در نتیجه، مختصات جغرافیایی منطبق بر روی نقشه جهان قرار می گیرند و با ویژگی های مربوطه بارگذاری می شوند تا پیکربندی خودکار نمادهای نقطه را تکمیل کنند. نمادهای نقطه پیکربندی شده می توانند تابع پرس و جو اطلاعات ویژگی را درک کنند. از طریق آزمایشات نشان داده شده است که نمادهای نقطه نقشه را می توان به طور موثر با استفاده از روش های یادگیری عمیق تشخیص داد. علاوه بر این، از طریق تطبیق کلمه کلیدی و ارتباط POI، یک اثر پیکربندی نقشه نماد نقطه خوب به دست می آید.
هنگام تهیه نقشه، افراد از گرافیک ها و نمادهای انتزاعی برای نشان دادن دنیای عینی واقعی استفاده می کنند که بازتاب اجماع شناختی نقشه نگار است. وقتی کاربران نقشه را می خوانند، نمادهای نقشه را می خوانند تا شناخت فردی خود را از جهان عینی شکل دهند. گروه های مختلف نقشه کشی ممکن است نمادهای نقشه متفاوتی را برای یک شیء جغرافیایی طراحی کنند، اما این امر بر درک عمومی از معنای نمادها تأثیر نمی گذارد. از این نظر، زبان نقشه یک زبان جهانی است که فراتر از مرزهای ملی و مناطق جغرافیایی است. با شروع متغیرهای بصری، که تغییرات در فاکتورهای گرافیکی یا رنگی هستند که می توانند باعث تفاوت بصری بین نمادها شوند، این می تواند مستقیماً به تفاوت در طراحی نمادها منجر شود. از نظر عناصر اساسی مانند شکل، اندازه و رنگ، درجه بالایی از اجماع شناختی بین دانشمندان چینی و خارجی وجود دارد. با این وجود، تفاوت هایی در درک و کاربرد وجود دارد، و بنابراین نمادهای نقشه ساخته شده از ترکیبات مختلف متغیرهای بصری متفاوت هستند، به طوری که نمایش نمادهای نقطه ویژگی مشابه از کشوری به کشور دیگر متفاوت است. این مطالعه به بررسی تشخیص و پیکربندی نمادهای نقطه در نقشههای چینی میپردازد و کاربرد الگوریتم YOLOv3 را برای شناسایی نمادهای نقشه نقطه و ارتباط با POI برای به دست آوردن مختصات به منظور تکمیل پیکربندی موقعیتیابی خودکار نماد نقطه پیشنهاد میکند. هنگام شناسایی نمادهای نقطه نقشه، اثر شناسایی با مجموعه داده مشروح شده همبستگی قابل توجهی دارد. شبکه عصبی ویژگیهای نمادهای برچسبگذاری شده در مجموعه داده را استخراج میکند و مکان و دستهبندی مناطق کاندید داده شده را پیشبینی میکند. برای سایر نمادهای نقطه بدون برچسب، دستگاه برای به دست آوردن اطلاعات ویژگی آموزش ندیده است و بنابراین نمی تواند آنها را تشخیص دهد. ایده ها و روش های فنی این مطالعه را می توان به سایر نقشه های ملی برای تشخیص و پیکربندی نماد نقطه تعمیم داد. با ساخت مجموعه داده های مختلف، شبکه عصبی ویژگی های انواع نمادهای موجود در مجموعه داده را می آموزد. سپس میتوان آنها را روی نقشه اعمال کرد تا شناسایی شود، و کار پیکربندی را میتوان از طریق ارتباط با POI انجام داد. با این حال، این مطالعه دارای تعدادی محدودیت است. نمادهای نقطه ای انتخاب شده در این مقاله، اشکال منظم هستند، که مراکز هندسی آن با مختصات جغرافیایی پیکربندی شده در Map World مطابقت دارد. با این حال، همه نمادهای نقطه، مرکز هندسی را به عنوان نقطه مکان خود نمی گیرند، و تأثیر نقطه مکان نماد نقشه بر روی اثر پیکربندی در نظر گرفته نشده است. این مطالعه اندازه نماد را با توجه به جلوه های بصری آن تنظیم می کند. با این وجود، همپوشانی نمادها زمانی رخ می دهد که اندازه نمادهای دو یا چند شی با فواصل مشابه بیش از حد بزرگ باشد. این مطالعه این وضعیت را در نظر نگرفته و صرفاً تلاشی برای اجرای روش پیشنهادی است. به طور خلاصه، این مطالعه پژوهشی را در زمینه شناسایی هوشمند و پیکربندی کارآمد نمادهای نقطه نقشه انجام داده و خلاصه ای از یافته ها را ارائه می دهد. این مطالعه تلاش ارزشمندی برای خودکارسازی تولید نقشه است.












بدون دیدگاه