

کلید واژه ها:
دوچرخه ; درختان ؛ سایبان ; NDVI ; ویدئو ؛ تشخیص خودکار ؛ دتکترون 2 ; مونترال
1. مقدمه
اهداف پژوهش
2. مواد و روشها
2.1. منطقه مطالعه و جمع آوری داده های اولیه
2.2. داده های ثانویه GIS در مورد شبکه راه و سایبان
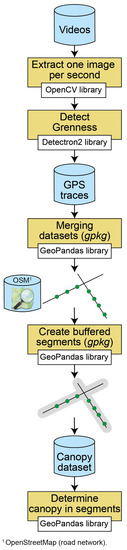
2.3. پردازش داده ها
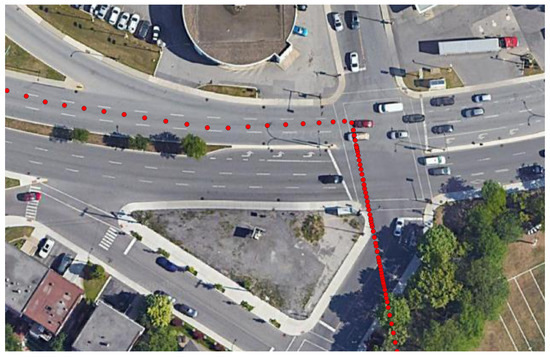
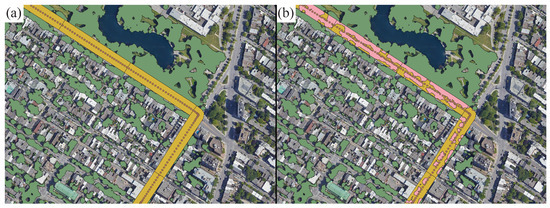
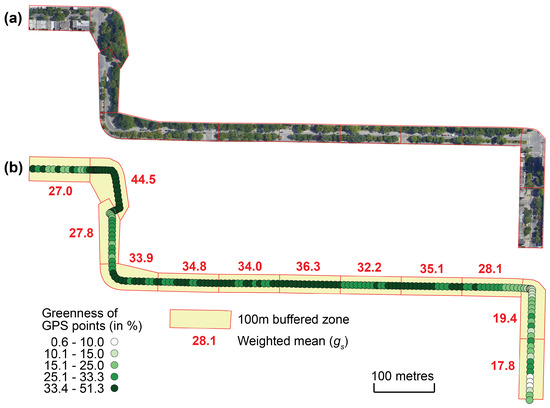
چهارم، هر مسیر به بخش هایی از 100 تا 400 متر با یک پله 50 متر تقسیم شد. طول های مختلف برای دیدن اینکه آیا یک طول خاص در پیش بینی سایبان در سطح مسیر کارآمدتر است (یعنی تجزیه و تحلیل حساسیت) مقایسه شد. این بخش ها از مختصات GPS هر مسیر با استفاده از کتابخانه GeoPandas [ 36 ] ایجاد شدند. بخش ها همچنین دارای سطح سبزی بودند ( gاس�اس، که میانگین وزنی درصد درخت هر نقطه است ( gمن�من)، جایی که wمن�منفاصله بین نقطه i و نقطه بعدی در طول قطعه است ( لاسلاس):
در نهایت، میتوان قسمتهایی از سایبان به دست آمده از دادههای NDVI را که با بخشهای مسیر تلاقی میکنند، تعیین کرد و درصد مساحت سایهبان را محاسبه کرد. سیاسسیاس، معادله ( 2 )) برای هر بخش ( شکل 5 ب). آمار تک متغیره اینها سیاسسیاسشاخص ها در جدول 3 گزارش شده است.
2.4. تحلیل داده ها
3. نتایج
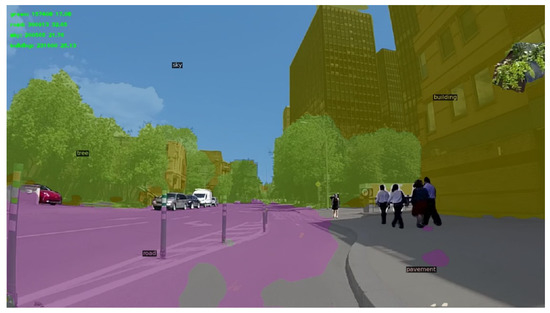
3.1. تشخیص درخت
3.2. همبستگی بین سبزی شناسایی شده و داده های تاج پوشش
4. بحث
4.1. استفاده از Detectron2 برای تشخیص سبزی
4.2. مقایسه دادههای سایبان با سبز بودن ویدیو
5. نتیجه گیری ها
منابع
- براتمن، GN; اندرسون، CB; برمن، ام جی; کوکران، بی. د وریس، اس. فلاندرز، جی. فولک، سی. فرومکین، اچ. گراس، جی جی. هارتیگ، تی. و همکاران طبیعت و سلامت روان: دیدگاه خدمات اکوسیستم علمی Adv. 2019 ، 5 ، eaax0903. [ Google Scholar ] [ CrossRef ] [ PubMed ]
- کاونتری، PA; براون، JE; پروین، جی. برابین، اس. پتمن، آر. بریدولت، جی. گیل بادی، اس. استنکلیف، آر. مک ایکان، آر. سفید، PL فعالیت های فضای باز مبتنی بر طبیعت برای سلامت روانی و جسمی: بررسی سیستماتیک و متاآنالیز. SSM-Popul. Health 2021 , 16 , 100934. [ Google Scholar ] [ CrossRef ] [ PubMed ]
- بولر، دی. Buyung-Ali، LM; Knight, TM; Pullin، AS مروری سیستماتیک از شواهد برای مزایای اضافه شده برای سلامت قرار گرفتن در معرض محیط های طبیعی. BMC Public Health 2010 , 10 , 456. [ Google Scholar ] [ CrossRef ]
- گروه، BMJP خطرات و مزایای سلامتی دوچرخهسواری در محیطهای شهری در مقایسه با استفاده از خودرو: مطالعه ارزیابی تأثیر سلامت. BMJ 2011 , 343 , d5306. [ Google Scholar ] [ CrossRef ]
- مجومدار، بی بی; میترا، س. پریخ، پ. در شناسایی و اولویت بندی عوامل محرک و بازدارنده دوچرخه سواری. ترانسپ Lett. 2020 ، 12 ، 591-603. [ Google Scholar ] [ CrossRef ]
- سرورو، آر. کالدول، بی. Cuellar, J. Bike-and-ride: آن را بسازید و آنها خواهند آمد. J. Public Transp. 2013 ، 16 ، 5. [ Google Scholar ] [ CrossRef ]
- وینترز، م. بروئر، ام. ستتون، EM; Teschke, K. محیط ساخته شده بر انتخاب های حمل و نقل سالم تأثیر می گذارد: دوچرخه سواری در مقابل رانندگی. J. Urban Health 2010 ، 87 ، 969-993. [ Google Scholar ] [ CrossRef ]
- Stefansdottir, H. دیدگاهی نظری در مورد اینکه چگونه مسافران دوچرخه ممکن است ویژگیهای زیباییشناختی فضای شهری را تجربه کنند. J. Urban Des. 2014 ، 19 ، 496-510. [ Google Scholar ] [ CrossRef ]
- پارسونز، آر. Tassinary، LG; اولریش، آر.اس. Hebl, MR; گروسمن-الکساندر، ام. منظره از جاده: پیامدهایی برای بازیابی استرس و ایمن سازی. جی. محیط زیست. روانی 1998 ، 18 ، 113-140. [ Google Scholar ] [ CrossRef ]
- Lusk، AC؛ داسیلوا فیلهو، دی اف. Dobbert، L. ترجیحات عابر پیاده و دوچرخه سوار برای مکان های درختی در کنار پیاده روها و مسیرهای دوچرخه سواری و مزایای مرتبط: پیامدهای جهانی از یک مطالعه در بوستون، MA. Cities 2020 , 106 , 102111. [ Google Scholar ] [ CrossRef ]
- رید، م. Kubzansky، LD; لی، جی. شمول، جی ال. Cougherty، JE ارزیابی سبز بودن آسان نیست: مقایسه مجموعه دادههای NDVI و انواع محلهها و ارتباط آنها با سلامت خود رتبهبندی در شهر نیویورک. Health Place 2018 ، 54 ، 92-101. [ Google Scholar ] [ CrossRef ] [ PubMed ]
- Rhew, IC; واندر استوپ، آ. کرنی، ا. اسمیت، NL; دانبار، MD اعتبار سنجی شاخص گیاهی تفاوت نرمال شده به عنوان معیاری برای سرسبزی محله. ان اپیدمیول. 2011 ، 21 ، 946-952. [ Google Scholar ] [ CrossRef ] [ PubMed ]
- لو، ی. یانگ، ی. سان، جی. Gou, Z. ارتباط بین نمای بالای سر و سبزی شهری در سطح چشم و رفتارهای دوچرخه سواری. شهرها 2019 ، 88 ، 10-18. [ Google Scholar ] [ CrossRef ]
- لی، ایکس. ژانگ، سی. لی، دبلیو. ریکارد، آر. منگ، کیو. ژانگ، دبلیو. ارزیابی فضای سبز شهری در سطح خیابان با استفاده از نمای خیابان گوگل و نمایه نمای سبز اصلاح شده. شهری برای. سبز شهری. 2015 ، 14 ، 675-685. [ Google Scholar ] [ CrossRef ]
- ویلنوو، پی جی; Ysseldyk، RL; روت، ا. آمبروز، اس. دی موزیو، جی. کومار، ن. شهاتا، م. شی، ام. دانه، E. لی، ایکس. و همکاران مقایسه شاخص تفاوت عادی شده گیاهی با معیار نمای خیابان Google از پوشش گیاهی برای ارزیابی ارتباط بین سبزی، پیاده روی، فعالیت بدنی تفریحی و سلامت در اتاوا، کانادا. بین المللی جی. محیط زیست. Res. بهداشت عمومی 2018 ، 15 ، 1719. [ Google Scholar ] [ CrossRef ]
- گائو، اف. لی، اس. تان، ز. ژانگ، ایکس. لای، ز. Tan, Z. چگونه فضای سبز شهری با استفاده از اشتراک دوچرخه بدون اسکله در روزهای هفته، آخر هفته و تعطیلات مرتبط است؟ ISPRS Int. J. Geo-Inf. 2021 ، 10 ، 238. [ Google Scholar ] [ CrossRef ]
- Garrett, BL جغرافیاهای ویدئویی: استفاده از ویدیوی دیجیتال برای تحقیقات جغرافیایی. Prog. هوم Geogr. 2011 ، 35 ، 521-541. [ Google Scholar ] [ CrossRef ]
- بوشر، ام. Urry, J. متدهای موبایل و تجربی. یورو J. Soc. نظریه 2009 ، 12 ، 99-116. [ Google Scholar ] [ CrossRef ]
- هنائو، ا. Apparicio, P. سبقت خطرناک دوچرخه سواران در مونترال. ایمنی 2022 ، 8 ، 16. [ Google Scholar ] [ CrossRef ]
- جری، وی. آپاریسیو، پی. سوار در صلح: چگونه انواع زیرساخت های دوچرخه سواری بر وقوع درگیری ترافیکی در مونترال، کانادا تأثیر می گذارد. ایمنی 2021 ، 7 ، 63. [ Google Scholar ] [ CrossRef ]
- اسماعیل، ک. سید، ت. سونیر، ن. Lim, C. تجزیه و تحلیل خودکار درگیری های عابر پیاده و وسیله نقلیه با استفاده از داده های ویدیویی. ترانسپ Res. ضبط 2009 ، 2140 ، 44-54. [ Google Scholar ] [ CrossRef ]
- جکسون، اس. میراندا-مورنو، LF; سنت اوبین، پی. Saunier، N. Flexible، سیستم دوربین فیلمبرداری سیار و نرم افزار تجزیه و تحلیل ویدئو منبع باز برای ایمنی جاده و تجزیه و تحلیل رفتاری. ترانسپ Res. ضبط 2013 ، 2365 ، 90-98. [ Google Scholar ] [ CrossRef ]
- سونیر، ن. Sayed, T. تجزیه و تحلیل خودکار ایمنی جاده با داده های ویدئویی. ترانسپ Res. ضبط 2007 ، 2019 ، 57–64. [ Google Scholar ] [ CrossRef ]
- جابر، ب. نورالدین، ف. رحمانی، ک. مقایسه دقت و کارایی مدلهای منبع باز تشخیص اشیا. بین المللی J. Online Biomed. مهندس (iJOE) 2021 ، 17 ، 165. [ Google Scholar ] [ CrossRef ]
- ماندال، وی. Adu-Gyamfi، Y. الگوریتم های تشخیص و ردیابی شی برای شمارش وسایل نقلیه: تجزیه و تحلیل مقایسه ای. J. Big Data Anal. ترانسپ 2020 ، 2 ، 251-261. [ Google Scholar ] [ CrossRef ]
- وینترز، م. دیویدسون، جی. کائو، دی. Teschke، K. محرک ها و عوامل بازدارنده دوچرخه سواری: مقایسه تأثیرات در تصمیم گیری برای دوچرخه سواری. حمل و نقل 2011 ، 38 ، 153-168. [ Google Scholar ] [ CrossRef ]
- مرتنز، ال. ون دایک، دی. قییر، ع. دوبوردوهویج، آی. دفورچه، بی. ون دی وگه، ن. ون کوونبرگ، جی. کدام عوامل محیطی به شدت بر جذابیت یک خیابان برای حمل و نقل دوچرخه در میان بزرگسالان تأثیر می گذارد؟ مطالعه مشترک با استفاده از عکس های دستکاری شده بین المللی J. Health Geogr. 2016 ، 15 ، 31. [ Google Scholar ] [ CrossRef ]
- وانگ، آر. لو، ی. وو، ایکس. لیو، ی. یائو، ی. رابطه بین سبزی سطح چشم و فرکانس دوچرخه سواری در اطراف ایستگاه های مترو در شنژن، چین: یک رویکرد داده بزرگ. حفظ کنید. جامعه شهرها 2020 , 59 , 102201. [ Google Scholar ] [ CrossRef ]
- مشارکت کنندگان OpenStreetMap. Planet Dump بازیابی شد. 2017. در دسترس آنلاین: https://planet.osm.org (دسترسی در 26 دسامبر 2022).
- OpenStreetMap. کلید: بزرگراه 2022. در دسترس آنلاین: https://wiki.openstreetmap.org/wiki/Key:highway (در 26 دسامبر 2022 قابل دسترسی است).
- Communauté métropolitaine de Montréal, Données géoréférencées de l’Observatoire du Grand Montréal: Indice de canopée metropolitain. 2022. در دسترس آنلاین: https://observatoire.cmm.qc.ca/produits/donnees-georeferencees/#indice_canopee (در 26 دسامبر 2022 قابل دسترسی است).
- برادسکی، جی. کتابخانه openCV. دکتر Dobb’s J. Softw. ابزار پروفسور برنامه. 2000 ، 25 ، 120-123. [ Google Scholar ]
- وو، ی. کریلوف، آ. ماسا، اف. لو، WY; Girshick, R. Detectron2. 2019. در دسترس آنلاین: https://github.com/facebookresearch/detectron2 (در 26 دسامبر 2022 قابل دسترسی است).
- پاسسکه، آ. گراس، اس. ماسا، اف. لرر، ا. بردبری، جی. چانان، جی. کیلین، تی. لین، ز. گیملشاین، ن. آنتیگا، ال. و همکاران PyTorch: یک سبک ضروری، کتابخانه یادگیری عمیق با کارایی بالا. در پیشرفت در سیستم های پردازش اطلاعات عصبی 32 ; Wallach, H., Larochelle, H., Beygelzimer, A., d’Alché-Buc, F., Fox, E., Garnett, R., Eds.; Curran Associates, Inc.: Red Hook, NY, USA, 2019; صفحات 8024–8035. [ Google Scholar ]
- لین، TY; مایر، م. بلنگی، اس. بوردف، ال. گیرشیک، آر. هیز، جی. پرونا، پی. رامانان، دی. Zitnick، CL; Dollár, P. Microsoft COCO: اشیاء مشترک در زمینه. arXiv 2015 ، arXiv:1405.0312. [ Google Scholar ] [ CrossRef ]
- جوردال، ک. Bossche, JVd; فلیشمن، ام. واسرمن، جی. مک براید، جی. جرارد، جی. تراتنر، جی. پری، م. Badaracco، AG; کشاورز، سی. و همکاران geopandas/geopandas: V0.8.1. زنودو 2020 . [ Google Scholar ] [ CrossRef ]
- تیم اصلی R. R: زبان و محیطی برای محاسبات آماری . بنیاد R برای محاسبات آماری: وین، اتریش، 2021. [ Google Scholar ]
- تیم توسعه QGIS. سیستم اطلاعات جغرافیایی QGIS 2022. در دسترس آنلاین: https://www.qgis.org (در 26 دسامبر 2022 قابل دسترسی است).





بدون دیدگاه