

در بسیاری از شهرهای در حال توسعه، بهبود زیرساختهای حملونقل معمولاً با ساخت و نگهداری جادهها همراه است. این مقاله رویکردها و فرصتهایی را با استفاده از بهروزرسانی همتا به همتا برای بهبود شبکههای جادهای فضایی در حال ساخت و نگهداری ارائه میکند، که به نوبه خود جریان ترافیک را بهبود میبخشد و به طور کلی به نفع شهرها خواهد بود. در بسیاری از شهرها، شبکه راه های فضایی نیاز به تعمیر و نگهداری دارد و این کارها اغلب به انحرافات ترافیکی نیاز دارند. با خدمات فعلی GPS (سیستم موقعیت یاب جهانی)، تاخیر قابل توجهی در به روز رسانی بسیاری از شبکه های جاده ای فضایی وجود دارد. بنابراین، هنگامی که یک راننده قصد سفر به یک مکان خاص (مانند استارباکس) را دارد، ممکن است مسیر معمول او تغییر کرده باشد، اما شبکه جاده فضایی در GPS به روز نشده است. این می تواند از بسیاری جهات روی کاربر تأثیر بگذارد. مثلا، سفری که معمولاً پنج دقیقه طول میکشد، اکنون ممکن است نیم ساعت طول بکشد، با در نظر گرفتن زمان اضافی مورد نیاز برای یافتن راههای جایگزین و احتمالاً بسته شدن جادههای غیرمنتظرهتر، تا زمانی که راننده به مقصد خود برسد. این مقاله با پیشنهاد راهحلهایی که چندین مزیت از جمله مکانیسم جدید بهروزرسانی همتا به همتا را ارائه میدهد، به این موضوع میپردازد که به هدایت راننده به مسیر دیگری در هنگام تغییر جاده کمک میکند. علاوه بر این، مکانیسم بهروزرسانی همتا به همتا میتواند نظارت مستقل بر وضعیت جادهها و بهروزرسانی نقشهها برای جادههای جدید ساخته شده، و همچنین تجزیه و تحلیل تراکم جادهها، تراکم ترافیک، و حرکت افراد در زمانهای خاص را امکانپذیر کند. توجه داشته باشید که این کار بر ایده ها و رویکردهای مفهومی در نظر گرفته شده برای بهبود نقشه های مستقل تمرکز دارد.
کلید واژه ها:
شهرهای هوشمند ؛ شبکه راه فضایی ; بهبود نقشه ؛ GIS
1. مقدمه
GPS موبایل به طور گسترده ای در دسترس است و به نقشه های قابل دسترسی عمومی (به عنوان مثال، نقشه های اینجا و نقشه های گوگل) متصل می شود [ 1 ، 2 ]. علاوه بر این، ویژگی برنامه ریزی جهت و مسیر که مسیر را از نقطه شروع تا نقطه مقصد نشان می دهد، اکنون یکی از محبوب ترین برنامه های ناوبری است [ 3 ، 4 ]. این سیستمها به فرد اجازه میدهند برای یک شی خاص مانند سوپرمارکت یا پمپ بنزین جستجو کنند. شکل 1 نمونه ای از اجسام فضایی (پمپ های بنزین) را در نقشه های گوگل نشان می دهد.
با توسعه پایگاه های داده فضایی جدید، تعداد زیادی از پرس و جوهای فضایی، که در بسیاری از مناطق صنعتی اهمیت قابل توجهی دارند، در چند سال اخیر به طور جامع پیشنهاد و مطالعه شده اند [ 5 ، 6 ]. این پرس و جوها اهداف و مفاهیم مختلفی دارند. به عنوان مثال می توان به پیوستن، K نزدیکترین همسایه (kNN)، نقطه، محدوده، محدوده مکانی-زمانی، نزدیکترین همسایه معکوس (RNN) و جستارهای درون فاصله [ 7 ، 8 ] اشاره کرد. نمونه هایی در شکل 2 نشان داده شده است. این پرس و جوها را می توان در ساختارهای فضایی مختلف انجام داد. متداول ترین ساختارهای داده های مکانی عبارتند از: فضای اقلیدسی، شبکه جاده های فضایی و فضای سلولی [ 2 ].]. در فضای اقلیدسی، فاصله بین اجسام O1و O6فاصله مستقیم (خط مستقیم) بین آنها است. در فضای اقلیدسی، همه پرس و جوها از اندازه گیری فضای اقلیدسی استفاده می کنند. به عنوان مثال، یک جستجوی محدوده انجام شده در فضای اقلیدسی می تواند اشیاء فضایی را در شعاع 5 کیلومتری بازیابی کند. در این مثال، اندازه گیری فضای اقلیدسی برای تعیین فاصله از نقطه پرس و جو تا نقاط مورد نظر برای شعاع حداکثر 5 کیلومتر استفاده می شود. شکل 3 a یک پرسش اندازه گیری فضای اقلیدسی را نشان می دهد که در آن X می خواهد فاصله اقلیدسی بین مکان خود و شی Y را بازیابی کند . فضای سلولی نمایشی از مکان ها توسط مجموعه ای از سلول ها است که شامل اشیاء فضایی است ( شکل 3 را ببینیدج). تفاوت اصلی بین فضای سلولی و فضای اقلیدسی یا شبکه های راه فضایی، نمایش هندسی ویژگی فضایی است [ 9 ، 10 ].
شبکه راه های فضایی ساختار فضایی دیگری است که می تواند برای اشیاء فضایی ساکن یا متحرک در نظر گرفته شود [ 11 ]. در یک شبکه راه فضایی، فاصله بین O1و O2فاصله شبکه (یا کوتاهترین جاده) بین آنها که در آن است O1و O2اجسام متحرکی هستند که در یک جاده قرار دارند. در این فضا، پرس و جوها از منظر اندازه گیری شبکه راه در نظر گرفته می شوند [ 1 ، 11 ]. به عنوان مثال، یک پرس و جوی 3NN در یک شبکه جاده فضایی برای بازیابی دو شی فضایی نزدیکترین به آن انجام میشود. q1. در این مثال از اندازه گیری کوتاه ترین فاصله برای برگرداندن نتایج استفاده می شود. شکل 3 ب یک شبکه جاده فضایی را نشان می دهد، جایی که X می خواهد کوتاه ترین مسیر بین موقعیت خود و جسم متحرک C را بازیابی کند . این سازه فضایی محور اصلی این تحقیق است.
این مقاله مزایا و فرصتهای مکانیزم بهروزرسانی همتا به همتا را برای یک شبکه جادهای فضایی مورد بحث قرار میدهد. در بسیاری از شهرها، شبکه راه های فضایی تحت تعمیر و نگهداری منظم قرار نگرفته است. از این رو، رانندگان ممکن است مجبور شوند به دلیل کارهای تعمیر و نگهداری فعلی، مسیرهای مختلفی را طی کنند. بنابراین، هنگامی که یک راننده قصد سفر به یک مکان خاص را دارد، ممکن است مسیر معمول او مختل شود و مجبور شود از مسیر انحرافی استفاده کند، زیرا شبکه جاده فضایی در GPS به روز نشده است. این امر مستلزم آن است که کاربر به دنبال جاده های دیگری باشد که به مقصد او منتهی می شود. با این حال، این ممکن است به این معنی باشد که سفری که معمولاً چند دقیقه طول میکشد، اکنون ممکن است نیم ساعت طول بکشد. به عنوان مثال، در ریاض، عربستان سعودی، این مسائل اغلب به دلیل ساخت خطوط راه آهن مطرح می شود. مثلا، هنگامی که کاربر می خواهد به مکان خاصی برسد، ممکن است با تعجب متوجه شود که راه معمولی که طی می کند بسته شده است و برای رسیدن به مقصد باید مسیر دیگری را طی کند. بنابراین، این کار به بررسی مزایای داشتن مکانیزم بهروزرسانی همتا به همتا میپردازد که میتواند به راننده کمک کند تا بهترین مسیر را در صورت مواجهه با شرایط جاده تغییر یافته طی کند. سیستمی که می تواند به طور مستقل وضعیت جاده ها را نظارت کند، نقشه ها را برای جاده های تازه ساخته شده به روز کند و تراکم جاده ها، تراکم ترافیک و حرکت مردم را در یک زمان معین تجزیه و تحلیل کند، به اطمینان از شبکه ترافیکی بهتر و بهبود مدیریت ترافیک جاده کمک می کند. علاوه بر این، این سیستم را میتوان با برنامههایی تقویت کرد که میتوانند رفتار و واکنشهای راننده را هنگام استفاده از بخش خاصی از جاده در یک منطقه خاص نظارت کنند. ممکن است تعجب کند که راه معمولی که طی می کند بسته است و برای رسیدن به مقصد باید راه دیگری را طی کند. بنابراین، این کار به بررسی مزایای داشتن مکانیزم بهروزرسانی همتا به همتا میپردازد که میتواند به راننده کمک کند تا بهترین مسیر را در صورت مواجهه با شرایط جاده تغییر یافته طی کند. سیستمی که می تواند به طور مستقل وضعیت جاده ها را نظارت کند، نقشه ها را برای جاده های تازه ساخته شده به روز کند و تراکم جاده ها، تراکم ترافیک و حرکت مردم را در یک زمان معین تجزیه و تحلیل کند، به اطمینان از شبکه ترافیکی بهتر و بهبود مدیریت ترافیک جاده کمک می کند. علاوه بر این، این سیستم را میتوان با برنامههایی تقویت کرد که میتوانند رفتار و واکنشهای راننده را هنگام استفاده از بخش خاصی از جاده در یک منطقه خاص نظارت کنند. ممکن است تعجب کند که راه معمولی که طی می کند بسته است و برای رسیدن به مقصد باید راه دیگری را طی کند. بنابراین، این کار به بررسی مزایای داشتن مکانیزم بهروزرسانی همتا به همتا میپردازد که میتواند به راننده کمک کند تا بهترین مسیر را در صورت مواجهه با شرایط جاده تغییر یافته طی کند. سیستمی که می تواند به طور مستقل وضعیت جاده ها را نظارت کند، نقشه ها را برای جاده های تازه ساخته شده به روز کند و تراکم جاده ها، تراکم ترافیک و حرکت مردم را در یک زمان معین تجزیه و تحلیل کند، به اطمینان از شبکه ترافیکی بهتر و بهبود مدیریت ترافیک جاده کمک می کند. علاوه بر این، این سیستم را میتوان با برنامههایی تقویت کرد که میتوانند رفتار و واکنشهای راننده را هنگام استفاده از بخش خاصی از جاده در یک منطقه خاص نظارت کنند. این کار به بررسی مزایای داشتن مکانیزم بهروزرسانی همتا به همتا میپردازد که میتواند به راننده کمک کند تا بهترین مسیر را در صورت مواجهه با شرایط جاده تغییریافته طی کند. سیستمی که می تواند به طور مستقل وضعیت جاده ها را نظارت کند، نقشه ها را برای جاده های تازه ساخته شده به روز کند و تراکم جاده ها، تراکم ترافیک و حرکت مردم را در یک زمان معین تجزیه و تحلیل کند، به اطمینان از شبکه ترافیکی بهتر و بهبود مدیریت ترافیک جاده کمک می کند. علاوه بر این، این سیستم را میتوان با برنامههایی تقویت کرد که میتوانند رفتار و واکنشهای راننده را هنگام استفاده از بخش خاصی از جاده در یک منطقه خاص نظارت کنند. این کار به بررسی مزایای داشتن مکانیزم بهروزرسانی همتا به همتا میپردازد که میتواند به راننده کمک کند تا بهترین مسیر را در صورت مواجهه با شرایط جاده تغییریافته طی کند. سیستمی که می تواند به طور مستقل وضعیت جاده ها را نظارت کند، نقشه ها را برای جاده های تازه ساخته شده به روز کند و تراکم جاده ها، تراکم ترافیک و حرکت مردم را در یک زمان معین تجزیه و تحلیل کند، به اطمینان از شبکه ترافیکی بهتر و بهبود مدیریت ترافیک جاده کمک می کند. علاوه بر این، این سیستم را میتوان با برنامههایی تقویت کرد که میتوانند رفتار و واکنشهای راننده را هنگام استفاده از بخش خاصی از جاده در یک منطقه خاص نظارت کنند. تراکم ترافیک و جابجایی افراد در یک زمان معین به اطمینان از شبکه ترافیکی بهتر و بهبود مدیریت ترافیک جاده کمک خواهد کرد. علاوه بر این، این سیستم را میتوان با برنامههایی تقویت کرد که میتوانند رفتار و واکنشهای راننده را هنگام استفاده از بخش خاصی از جاده در یک منطقه خاص نظارت کنند. تراکم ترافیک و جابجایی افراد در یک زمان معین به اطمینان از شبکه ترافیکی بهتر و بهبود مدیریت ترافیک جاده کمک خواهد کرد. علاوه بر این، این سیستم را میتوان با برنامههایی تقویت کرد که میتوانند رفتار و واکنشهای راننده را هنگام استفاده از بخش خاصی از جاده در یک منطقه خاص نظارت کنند.
توجه داشته باشید که این مقاله بر ایدههای مفهومی و فرصتهای استفاده از مکانیزم بهروزرسانی همتا به همتا با فناوریهای IoT تمرکز دارد که نظارت مستقل بر جادههای فضایی را امکانپذیر میسازد. الگوریتم ها و نتایج دقیق در کارهای بعدی گنجانده خواهد شد.
2. بررسی ادبیات
2.1. نظارت بر ترافیک
با توسعه شهرنشینی، سطح ساخت و ساز در شهرها افزایش یافته است. به طور همزمان، تراکم ترافیک شهرهای در حال توسعه و سروصدای ترافیک بر کیفیت زندگی ساکنان شهری تأثیر منفی میگذارد. بنابراین، از هر دو دیدگاه اجتماعی و اقتصادی، اتخاذ رویههای مربوطه برای بهبود تراکم ترافیک و تضمین ترافیک شهری روان ضروری است [ 12 ].
بسیاری از محققان بر درک نظارت بر ترافیک و تراکم ترافیک تمرکز کرده اند [ 12 ، 13 ]. در [ 13 ] یک سیستم نظارت هوشمند ترافیک شهری پیشنهاد شد که وظیفه ردیابی وضعیت تراکم ترافیک و اتخاذ اقدامات فعال برای مقابله با این وضعیت را بر عهده داشت. این سیستم بر فناوری Spark متمرکز بود و از محاسبات توزیع شده پشتیبانی می کرد. کار تحقیقاتی دیگری بر تخمین وضعیت ازدحام محلی، با استفاده از مقادیر واقعی برای نشان دادن سطح ازدحام و به روز رسانی مداوم در طول زمان متمرکز بود [ 14 ]]. واضح است که تحقیقات تراکم ترافیک بدون تمرکز بر تأثیر به روز رسانی راه و نگهداری راه که هدف اصلی این تحقیق است، بر مسائل تراکم ترافیک و نظارت بر آن برای رانندگان متمرکز شده است. در ادامه، انواع رویکردها برای مسیریابی در شبکه راه های فضایی توضیح داده خواهد شد.
2.2. مسیریابی در یک شبکه راه فضایی
مفهوم شبکه راه فضایی تمرکز بسیاری از مطالعات قبلی بوده است [ 6 ، 15 ، 16 ، 17 ، 18 ]. این بخش به بررسی آثاری میپردازد که از مفهوم شبکه جادهای فضایی برای تعیین کوتاهترین مسیر بین دو مکان معین استفاده کردهاند. این برای نشان دادن اهمیت به روز رسانی شبکه جاده های فضایی در مسیریابی ضروری است.
الگوریتم Dijkstra اولین الگوریتمی بود که برای بدست آوردن کوتاهترین مسیر بین دو نقطه یا گره استفاده شد. این الگوریتم توسط Edsger Dijkstra در سال 1959 [ 19 ] پیشنهاد شد. ایده اصلی پشت این الگوریتم جستجوی یک نمودار برای یافتن کوتاه ترین مسیر بین گره های گراف با در نظر گرفتن وزن داده شده هر یال است. در این الگوریتم، زمانی که گره شروع کننده تعیین می شود، الگوریتم می تواند کوتاه ترین مسیر را بین گره و هر گره دیگری در نمودار پیدا کند. این الگوریتم معمولاً در مسیریابی و در پردازش پرس و جو فضایی استفاده می شود [ 19 ]. برای محاسبه کوتاه ترین فاصله شبکه در پردازش پرس و جو فضایی، الگوریتم Dijkstra اندکی اصلاح شده است تا تغییرات در پردازش پرس و جوهای فضایی را تطبیق دهد [ 20 ]]. در یک شبکه راه فضایی، جنبه اساسی فاصله شبکه بین دو شی فضایی است که در آن فاصله شبکه کمترین فاصله بین دو نقطه است. بنابراین، تمرکز در اینجا بر شناسایی کوتاه ترین فاصله شبکه بین دو شی فضایی داده شده است [ 20 ، 21 ، 22 ].
از آنجا که الگوریتم Dijkstra می تواند برای تعیین کوتاه ترین فاصله بین دو گره داده شده استفاده شود، این الگوریتم برای پردازش پرس و جو فضایی مفید است [ 2 ، 23 ]. با این حال، در اینجا، شی مورد نظر در داخل خطوط (یا جاده) قرار دارد و نه در گره، مانند الگوریتم Dijkstra. این تفاوت اصلی است. از این رو، الگوریتم Dijkstra برای رسیدگی به این وضعیت اصلاح شده است. علاوه بر این، از آنجایی که تمرکز ما در اینجا فقط بر روی کوتاهترین فاصله بین دو شی در جاده (مسیر) است، الگوریتم Dijkstra اصلاحشده ورودی برای مکانهای دو شی فضایی خواهد بود [ 20 ]. این به عنوان کوتاه ترین فاصله شبکه شناخته می شود. نمونه ای از کوتاه ترین فاصله شبکه در شکل 4 نشان داده شده استآ. فرض کنید دو شی فضایی وجود دارد، g3و g5، جایی که g3در جاده بین گره ها قرار دارد ن3و ن1، در حالیکه g5بین قرار دارد ن4و ن8. در این مثال، فرآیند کوتاهترین فاصله شبکه، کوتاهترین فاصله را پیدا میکند g3و g5.
از سوی دیگر، رویکرد افزایشی k نزدیکترین همسایه (IkNN) مجموعه ای از اشیاء فضایی نامزد را به منظور به دست آوردن کوتاه ترین مسیر [ 24 ] ارائه می دهد. روش IkNN از نقطه پرس و جو شروع می شود و از طریق k شی مورد علاقه، مانند یافتن کوتاه ترین مسیر به دو پمپ بنزین از q1. در این مورد، یک kNN معمولی است زیرا نتیجه کوتاهترین مسیر به سمت اشیاء فضایی مورد نظر، یکی پس از دیگری است. توجه داشته باشید که IkNN از گسترش شبکه به عنوان یک گسترش شبکه افزایشی (INE) استفاده می کند [ 24 ، 25 ]. در IkNN، ایده اصلی روش گسترش شبکه این است که همه شاخههای توسعه را تا زمانی که جادهای پر از اشیاء فضایی مورد نظر پیدا شود، ثبت کند. در اینجا جاده به عنوان مرز تعیین شده است. اگر جاده ای کوتاه تر از مرز وجود داشته باشد، گسترش ادامه می یابد. مسیر را می توان تا زمانی که همه شاخه های بالقوه فراتر از مرز گسترش یابند، منقبض شود. توجه داشته باشید که IkNN فقط بر روی یک نوع واحد از نقطه مورد نظر مکانی (اشیاء) تمرکز می کند ( شکل 4 ب را ببینید).
علاوه بر این، جستجوی مسیر بر روی مکانهای ثابت (معروف به RFix) میتواند کارآمدترین مسیر را برای مکانهای ثابت از پیش تعیینشده توسط کاربر پیدا کند [ 26 ، 27 ]. در اینجا، تمرکز بر جستجوی یک مسیر در چندین مکان مختلف است. در این مورد، جستجو بر اساس مکانهایی است که کاربر از قبل تعیین کرده است، مانند بانک SABB در شعبه رینگ شمالی و زایکسداروخانه در خیابان شاه فهد، الملقاء، ریاض 13521. توجه داشته باشید که در این مورد، یک بانک خاص (SABB) نامیده می شود تا یک بانک به طور کلی. به طور مشابه، زایکسدنبال داروخانه هست نه هر داروخانه ای. علاوه بر این، مکان دقیق داده شده است: خیابان شعبه حلقه شمالی، در Taawun، ریاض 12477.
2.3. مسیرها در به روز رسانی شبکه راه
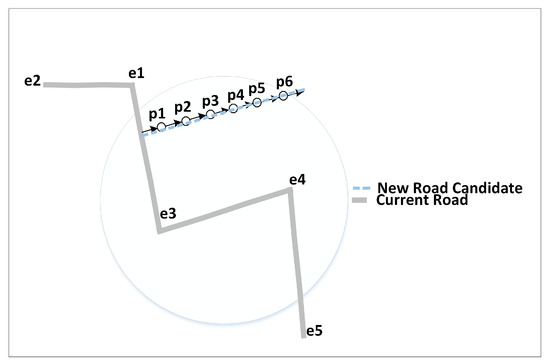
علاوه بر این، مرجع [ 28 ] یک رویکرد خودکار برای شناسایی و به روز رسانی هر جاده جدید اضافه شده به شبکه جاده فعلی پیشنهاد کرد. با این حال، تمرکز آنها فقط روی دادههای مسیر GPS با کیفیت پایین بود که با تصاویر سنجش از راه دور و دادههای GPS با کیفیت بالا جمعآوری شده توسط وسایل نقلیه بررسی حرفهای مقایسه شد. دادههای مسیر GPS جمعآوریشده توسط وسایل نقلیه عمومی نسبتاً ارزان هستند و میتوان آنها را در زمان واقعی با پوشش جامع به دست آورد. اساساً، به منظور یافتن جادههای جدید اضافی در شبکه جادهها، از مسیرهای وسایل نقلیهای استفاده کردند که با شبکه اصلی جاده مطابقت ندارند [ 29 ]. بنابراین، بر اساس تطابق نقطه به بخش، هر نقطه نمونه برداری غیر همتا، راه های جدیدی خواهد بود که به شبکه اصلی راه اضافه شده است.شکل 5 نشان می دهد که چگونه جاده های جدید نشان داده شده است پ1، پ2، پ3، پ4، پ5، و پ6.
از سوی دیگر، مرجع [ 30 ] با معرفی یک الگوریتم بهینهسازی مشترک نقشه-مسیر مبتنی بر تکرار بر کیفیت نقشهها و مسیرها تمرکز کرد. اساساً، به منظور دستیابی به فرآیند بهینهسازی مشارکتی که به منظور افزایش همزمان کیفیت بهروزرسانی نقشه و تطبیق نقشه، اقدامات کیفی را برای کمی کردن کیفیت تطبیق نقشه و کیفیت نقشه معرفی کردند. در اینجا، هدف اصلی به حداکثر رساندن امتیاز کیفیت است. علاوه بر این، آنها یک امتیاز اطمینان و یک امتیاز تأثیر به منظور اندازه گیری دقت هر جاده جدید که توسط هر به روز رسانی نقشه نشان داده شده است، ایجاد کردند. توجه داشته باشید که امتیاز اطمینان، اطمینان در استنباط هر جاده جدید را ارزیابی می کند، و امتیاز تأثیر، سهم آن را در بهبود نتایج تطبیق نقشه ارزیابی می کند. در [ 30]، یک الگوریتم تطبیق نقشه و مفهوم قطعیت تطبیق برای ارزیابی بهتر تأثیر جاده استفاده شد. شکل 6 نمونه ای از مسیرهای بی همتا را نشان می دهد که با استفاده از این روش یافت می شوند.
علاوه بر این، سرویسهای نقشه رایج مانند Google Maps، HERE، و سایرین معمولاً از چندین منبع داده متنوع برای ایجاد نقشههای اولیه استفاده میکنند و سپس بهروزرسانیها را بر اساس وسایل نقلیه (حاشیهنویسان و داوطلبان) برای شناسایی و بهروزرسانی معایب جادهای فعلی استفاده میکنند [ 31 ، 32 ] . با این حال، این فرآیند معمولاً منجر به واکنش بسیار کند در تصحیح نقشهها در صورت بروز هرگونه تغییر در شبکه جادهها میشود. در بسیاری از کشورهای جهان، به ویژه کشورهای در حال توسعه، شهرهای بزرگ همیشه در حال ساخت هستند، که تمایل به ایجاد تأخیر قابل توجه و داده های گمراه کننده در مورد این شهرها دارد. برخی از آثار از OpenStreetMap برای به دست آوردن به روز رسانی در مورد مشکلات مربوط به جاده استفاده می کنند [ 31 ، 33 ]. به عنوان مثال، Map Fusion [31 ] برنامه ای است که به طور خودکار دو نقشه را ادغام می کند. یکی از نقشه ها نقشه ای است که به کندی به روز می شود مانند OpenStreetMap (OSM)، در حالی که نقشه دیگر یک نقشه استنباط خودکار با پوشش ناقص و ساختار توپولوژیکی ناقص است.
3. تجزیه و تحلیل شکاف
همانطور که گفته شد، اکثر مطالعات انجام شده در مورد پردازش پرس و جو شبکه راه های فضایی فرض بر این داشتند که شبکه راه های فضایی به درستی و به سرعت به روز شده است. علاوه بر این، بیشتر کارها سعی در بهبود جنبه های مختلف شبکه های فضایی جاده ها به منظور کمک به کاربران جاده برای رسیدن به مقصد داشتند. دیگران بر به روز رسانی کارهای تعمیر و نگهداری که در شبکه های جاده ای انجام می شود با اعمال مسیرهای کاربر متمرکز شدند. با این حال، یک مشکل اساسی به خصوص زمانی که سرور بهسرعت بهروزرسانی نمیشود، ایجاد میشود. علاوه بر این، به دلایلی مانند کارهای تعمیر و نگهداری، یک شبکه جاده فضایی ممکن است راننده را ملزم به انجام یک یا چند مسیر انحرافی کند. بنابراین، این مطالعه مکانیسمها و ایدههای بهروزرسانی همتا به همتا را برای بهروزرسانی شبکههای جادهای در فضای باز با ترکیب فناوریهای IoT مانند نظارت بر کیفیت جاده و چراغهای اضطراری خودکار ارائه میکند.
پیامدهای مسیریابی نادرست در شبکه راه ها چه می تواند باشد؟ در زیر به بررسی این موضوعات می پردازیم که در ریاض عربستان سعودی اتفاقات رایجی است.
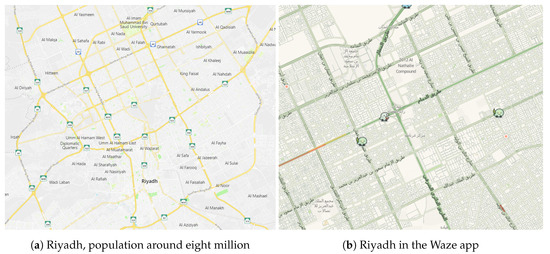
در ریاض، پایتخت عربستان سعودی (نگاه کنید به شکل 7 الف)، ساخت و ساز مترو به طور رسمی در آوریل 2014 آغاز شد و قرار بود تمام مناطق اصلی پایتخت را پوشش دهد تا انواع روش های حمل و نقل را برای ساکنان فراهم کند. از زمان شروع پروژه، بسیاری از جاده ها و مناطق به طور موقت یا برای همیشه از دسترس خارج شده اند. کارهای ساخت و ساز جاده ها را تحت تاثیر قرار داده و جاده ها را برای مدت معینی از یک ساعت یا کمتر تا چند روز بسته است. مسئله اصلی بهروزرسانی نادرست یا کند شبکههای جادهای فضایی در بسیاری از مناطق شهر است، به این معنی که سفر به مکانهای خاص ممکن است طولانیتر و دشوارتر باشد.
این مسائل را نمی توان با استفاده از سرویس های رایج GPS مانند نقشه های گوگل یا حتی نقشه های Waze [ 34 ] حل کرد. در Google Maps، ویژگی Maps Traffic اساساً با تجزیه و تحلیل موقعیتهای تعیینشده توسط GPS که توسط تعداد زیادی از کاربران تلفنهای هوشمند به سرورهای نقشه ارسال میشود، کار میکند. Google Maps با محاسبه سرعت راننده و طول جاده قادر به تهیه نقشه ترافیک زنده است. علاوه بر این، اخیراً Google Maps به هر کاربر اجازه می دهد تا در مورد تصادفات، دوربین های کنترل سرعت یا ساخت و ساز جاده گزارش یا بازخورد بدهد. Google بهروزرسانیهایی را برای سرور ارائه میکند [ 34 ، 35] با پردازش داده های خام ورودی که مکان دستگاه های تلفن همراه را نشان می دهد و سپس ناهنجاری هایی مانند وسیله نقلیه پستی که مکرر توقف می کند را حذف می کند. هنگامی که یک آستانه کاربران در یک منطقه خاص مشخص می شود، پوشش در امتداد جاده ها و بزرگراه ها در نقشه گوگل تغییر رنگ می دهد.
Waze با نرمافزار ناوبری GPS سنتی تفاوت دارد زیرا مبتنی بر جامعه است، دادههای نقشه تکمیلی و اطلاعات ترافیک را از کاربران خود جمعآوری میکند [ 31 ، 35 ] و سایر نرمافزارهای GPS. اطلاعاتی را از زمان رانندگی کاربران به دست می آورد تا مسیریابی و به روز رسانی ترافیک در زمان واقعی را ارائه دهد. دانلود و استفاده از آن رایگان است. مردم میتوانند تصادفات، ترافیک، و تلههای سرعت و پلیس را گزارش کنند و میتوانند از ویرایشگر نقشه آنلاین برای بهروزرسانی جادهها، مکانهای دیدنی، شماره خانهها و غیره استفاده کنند. Waze همچنین کمهزینهترین جایگاه سوخت نزدیک به رانندگان یا در طول مسیر را شناسایی میکند، مشروط بر اینکه Waze قیمت سوخت را برای آن کشور فعال کرده است. برنامه Waze برای ریاض در شکل 7 ب نشان داده شده است.
با این حال، اغلب، مسائل نشان داده شده توسط خدمات نقشه فعلی مربوط به ترافیک [ 30 ] است. این یک دلیل رایج برای شکایت و چندین مورد دیگر است که می تواند منجر به ترافیک شود. در اینجا یک سوال مهم مطرح می شود: چه چیزی می تواند باعث ایجاد ترافیک شود؟ در Waze یا Google Maps، اگر کاربر ساخت جاده یا تصادف را گزارش کند، بهروزرسانی همچنان به دستگاههای تلفن همراه متکی است. علاوه بر این، بهروزرسانی شبکه جادهای نمیتواند بلافاصله از طریق این سیستمها انجام شود، که معمولاً چند روز طول میکشد تا توسط سرور بهروزرسانی شود. با این حال، یک بخش جدید می تواند به طور موقت به دلیل ساخت و ساز در شهرهای در حال توسعه باز شود [ 30]. به همین ترتیب، شناسایی جادههای مشکلساز بدون امکان بهروزرسانی و شناسایی بخشی از جاده یا یک انحراف جاده جدید، راه بندانهای ترافیکی را حل نمیکند [ 35 ]. استفاده از فناوریهای IoT (اینترنت اشیا) از طریق سیستم P2P (Peer to Peer) و OBD2 (On-Board Diagnostics) میتواند منشأ مشکلات ترافیکی را حل کند و همواری شبکههای جادهای فضایی را بهبود بخشد.
با این حال، مشکل اصلی این است که در ریاض، هیچکدام از سیستمها کارآمد نیستند، عمدتاً زیرا کارهای ساختمانی و تغییر شرایط جاده اغلب غیرمنتظره (و برای مدت زمان بسیار کوتاه) هستند و بنابراین، مسیرهایی که توسط این برنامهها نشان داده میشوند اغلب نادرست هستند. اگرچه Waze از بازخورد رانندگان استفاده می کند، تغییرات مسیریابی را نمی توان اعمال کرد. رانندگان ممکن است نشان دهند که یک جاده خاص بسیار شلوغ است، اما این وضعیت ممکن است طولانی نباشد. بنابراین، روش به روز رسانی پیشرفته تری برای رسیدگی به موضوع تغییرات غیرمنتظره مسیر مورد نیاز است. در مرحله بعد، چندین سناریو مشکل در نظر گرفته می شود.
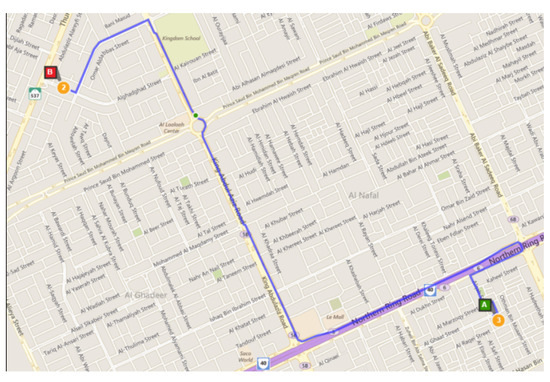
اگر کاربر الف بخواهد از مکان فعلی خود به مکان B (کافی شاپ) برود، مسیر معمول روی نقشه مانند شکل 8 است، جایی که کاربر از جاده کمربندی شمالی به سمت جاده ملک عبدالعزیز می رود و از آنجا می پیچد. به مقصد خود رها شده است. مسافت تقریباً 7 کیلومتر است و این سفر معمولاً حدود 11 دقیقه طول می کشد. اما به دلیل کار ساخت و ساز، جاده ملک عبدالعزیز برای چند ساعت بسته خواهد شد و این آپدیت برای سرور ارسال نشده است. بنابراین، راننده ای که معمولاً در این جاده حرکت می کند، مجبور می شود یک دوربرگردان انجام دهد و جاده ای جایگزین برای B پیدا کند.
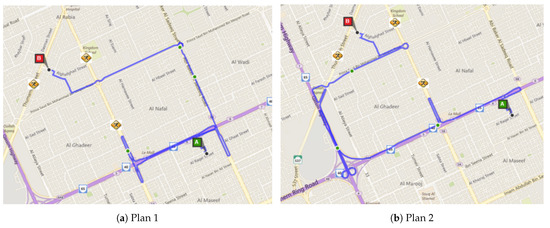
این موضوع در شهری که رانندگان مجبور به تغییر مسیر و یافتن جاده دیگری به مقصد می شوند، رایج است. توجه داشته باشید که در خدمات GPS، مسیر اصلی نشان داده شده در شکل 8 همچنان اعمال می شود و تغییر نمی کند زیرا این برنامه ها از بازخورد راننده برای به روز رسانی اطلاعات جاده استفاده نمی کنند. در سناریوی قبلی، A باید مسیر معمول خود را تغییر دهد و پلان 1 یا پلان 2 (به عنوان مثال) را اتخاذ کند. در طرح 1، A باید یک دور برگرداند و از جاده کمربندی شمالی به سمت جاده ابوبیکر السیداق به شرق برود، سپس از جاده پرایس سعود بن محمد به مقصد برود. با این حال، در این مورد، مسافت 15 کیلومتر است و سفر حدود 30 دقیقه طول می کشد ( شکل 9 a را ببینید). در طرح 2، کاربر Aباید یک دور برگرداند و از جاده کمربندی شمالی به سمت جاده ملک فهد به شرق بروید، سپس مسیر را به سمت شمال جاده ملک فهد تغییر دهید، سپس جاده شاهزاده سعود بن محمد را به مقصد برسانید. با این حال، در این مورد، مسافت حدود 18 کیلومتر است و سفر حدود 27 دقیقه طول می کشد ( شکل 9 ب را ببینید). توجه داشته باشید که در این سناریوها فرض بر این است که کاربر با جاده ها آشنایی دارد.
واضح است که پلان 1 و پلان 2 تأثیر زیادی بر مسیریابی دارند زیرا زمان، مسافت و هزینه همه افزایش یافته است. این مقاله رویکردها و فرصتهایی را برای توسعه و بهبود مسیریابی در شهرهایی مانند ریاض که تحت تأثیر تغییرات سریع شرایط جادهای به دلیل ساختوساز، اصلاحات و تعمیر و نگهداری هستند، برجسته میکند.
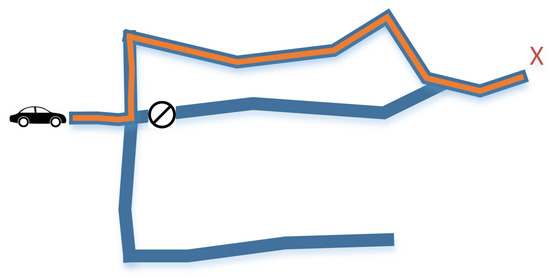
علاوه بر این، اختلالات ترافیکی می تواند به دلیل مسدود شدن کامل یا جزئی جاده ایجاد شود. بلوک کامل جاده وضعیتی است که در آن جاده کاملاً بسته است و کاربر باید راه دیگری برای رسیدن به مقصد پیدا کند.
شکل 10 یک استراتژی تغییر مسیر را نشان می دهد که در آن خودرو به دلیل تغییر در شرایط ترافیکی نمی تواند به طور مستقیم به نقطه X برسد. بنابراین، راننده باید مسیر دیگری را تا مقصد خود طی کند. تغییر مسیر به مقصد معمول است و برخی از سیستمهای ناوبری مانند Google Maps و Waze به تغییر شرایط جاده پاسخ میدهند و بر این اساس کاربران را تغییر مسیر میدهند. با این حال، از آنجایی که این نقشهها همیشه بر گزارشهای کاربران در مورد آخرین وضعیت جادهها تکیه میکنند، برخی تغییرات تا زمانی که رانندگان مسیر را اشتباه میروند یا در ترافیک سنگین گیر کردهاند، شناسایی نمیشوند.
یکی دیگر از اختلالات ترافیکی می تواند ناشی از انسداد جزئی جاده باشد. در این شرایط، یکی از خطوط ممکن است بسته شود و حتی با وجود اینکه ترافیک همچنان می تواند حرکت کند، ترافیک ایجاد می کند. اکثر سیستم های ناوبری فعلی علت این اختلال را تشخیص نمی دهند مگر اینکه کاربران رویداد را به سرور گزارش دهند.
به عنوان مثال، یک تصادف جاده ای ممکن است نیمی از جاده را مسدود کند، اما ترافیک همچنان می تواند جریان داشته باشد، هرچند با سرعت کاهش یافته، در نتیجه باعث ازدحام شدید ترافیک می شود. اگرچه هنوز می توان از جاده استفاده کرد، اما سیستم های ناوبری مانند Google Maps یا Waze سعی می کنند از این جاده اجتناب کنند مگر اینکه این جاده تنها مسیر رسیدن به مقصد باشد. انسداد جزئی جاده همچنین می تواند در اثر ساخت و ساز یا تعمیر راه، وسایل نقلیه از کار افتاده، رویدادهای عمومی، باران، تعمیر و نگهداری تاسیسات یا شرایط اضطراری ایجاد شود. برخی رویدادها باید به سرعت و به طور موثر مدیریت شوند تا از ترافیک سنگین جلوگیری شود. در ادامه، رویکرد ارتقای نقشه مستقل برای شبکههای جادهای فضایی توضیح داده میشود.
4. ارتقاء نقشه مستقل
در حال حاضر، شبکه های همتا به همتا به دلیل مقیاس پذیری آنها محبوب شده اند [ 36 ]. به دلیل محدودیتهای سیستمهای متمرکز، توسعه سیستمهای موبایل نظیر به نظیر (P2P) راهحلهای مطلوبی را ارائه میدهد. P2P می تواند مشکلات ناشی از خرابی مرکزی (مبتنی بر ایستگاه) و نقاط ایزوله را حل کند. با P2P، افراد می توانند از طریق ارتباطات بی سیم برد (مانند WiFi ad hoc، بلوتوث، زیرساخت ابری، و غیره) با یکدیگر تماس بگیرند یا با اشیاء قابل دسترس اطراف خود (به عنوان مثال، رانندگان در وسایل نقلیه) تبادل اطلاعات کنند [ 37 ]. در یک سیستم P2P، همتاهای به هم پیوسته مبتنی بر مفهوم همسایگی هستند [ 38]. همسایگی مفهومی است که می تواند درک محیط اطراف را تسهیل کند و تماس بین دسته ای از اشیاء را امکان پذیر می سازد [ 38 ]. توجه داشته باشید که مسئله محله های ایزوله با استفاده از ارتباطات دوربرد قابل حل است که دو محله را قادر می سازد با یکدیگر ارتباط برقرار کنند. این را می توان با استفاده از یک سیستم شبکه مش بی سیم، که می تواند دو نوع ارتباط را ترکیب کند: برد کوتاه و برد بلند [ 39 ] به دست آورد.
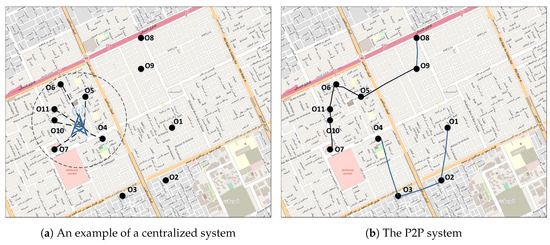
شکل 11 a نمونه ای از یک سیستم متمرکز را نشان می دهد. همانطور که مشخص است، اشیاء O8، O9، O1، O2، و O3خارج از محدوده ارتباطی هستند. در حالی که سیستم P2P می تواند مشکل یک ایستگاه متمرکز را با رفع نیاز به چنین ایستگاه هایی حل کند. شکل 11 ب نشان می دهد که چگونه یک سیستم P2P سیار می تواند مشکل یک ایستگاه متمرکز را حل کند. از شکل 11 ب مشخص است که اشیاء دیگر اکنون به اشیاء بیشتری اجازه می دهند، مانند O8(به همین ترتیب O9، O1، O2، و O3) برای پیوستن به ارتباطات در محیط شبکه. علاوه بر این، محله ها اکنون به دلیل ترکیب دو نوع ارتباط، می توانند با یکدیگر ارتباط برقرار کنند: برد کوتاه و بلند برد [ 39 ].
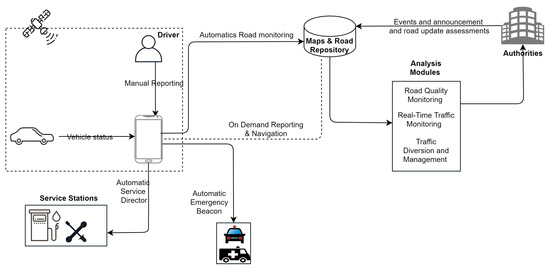
رویکرد ارتقای نقشه مستقل روشی است که در آن نقشه ها بر اساس حرکات کاربران به روز، بررسی و تجدید می شوند. رویکرد تقویت نقشه مستقل (IME) روشی است که برای نظارت بر وضعیت فعلی جاده و تطبیق سیستم ناوبری با این شرایط استفاده می شود. چارچوب IME در شکل 12 در زیر نشان داده شده است. این چارچوب پیشنهادی IME را نشان میدهد که دارای هفت ماژول است: ورودی، مدیر خدمات خودکار، چراغ اضطراری خودکار، تجزیه و تحلیل، ناوبری، شناسایی بخشهای جادهای جدید، و سیستم انحراف جاده جدید. هر ماژول در زیر توضیح داده شده است.
4.1. ماژول ورودی
IME دارای سه سناریو بازخورد ورودی است: نظارت خودکار جاده، بازخورد کاربران و ورودیهای مقامات. هر جزء در زیر توضیح داده شده است.
4.1.1. نظارت خودکار جاده ها
مؤلفه نظارت خودکار جاده (ARM) برای این رویکرد بسیار مهم است، زیرا سیستم وضعیت هر وسیله نقلیه (مانند سرعت، دور، سوخت، فرکانس های شکست) را که می توان از رایانه های سواری خودرو و محیط به دست آورد، نظارت خواهد کرد. مانند محل حرکت وسیله نقلیه، مکان ها، ارتفاع، شیب و شرایط جاده که می توان از لرزش وسیله نقلیه تعیین کرد.
در شناسایی یک جاده جدید تعریف نشده، ARM وضعیت جاده را ثبت می کند و اطلاعات را از طریق سیستم P2P ارسال می کند، که تعیین می کند که آیا جاده قابل دسترسی است یا خیر. مشکلی که معمولاً در ریاض یافت می شود این است که وجود یک جاده جدید ممکن است گزارش نشده باشد، بنابراین برخی از GPS کاربران را در وسط بیابان فرض می کنند.
برای تشخیص وضعیت ترافیک، ARM الگوی رانندگی گروهی از وسایل نقلیه نزدیک را تجزیه و تحلیل میکند و نتیجه میتواند به عنوان یک سیستم هشدار اولیه برای سایر کاربرانی که در این نزدیکی هستند یا به سمت این مکان حرکت میکنند استفاده شود.
هنگام تشخیص یک بلوک جاده، اعم از جزئی یا کلی، سیستم همچنین مسیر رانندگی را کنترل می کند. اگر وسیله نقلیه با موانعی روبرو شود و راننده مسیرهای از پیش تعریف شده را ترک کند، سیستم اعتبارسنجی متقاطع سایر وسایل نقلیه را که مسیر مشابهی را طی می کنند انجام می دهد تا مشخص کند آیا مسدود بودن جاده وجود دارد یا خیر. نتیجه را می توان به عنوان یک سیستم هشدار اولیه برای هشدار دادن به سایر رانندگانی که در همان جهت حرکت می کنند استفاده کرد تا بتوانند از مسدود شدن جاده اجتناب کنند و مسیر متفاوتی را به سمت همان مقصد طی کنند.
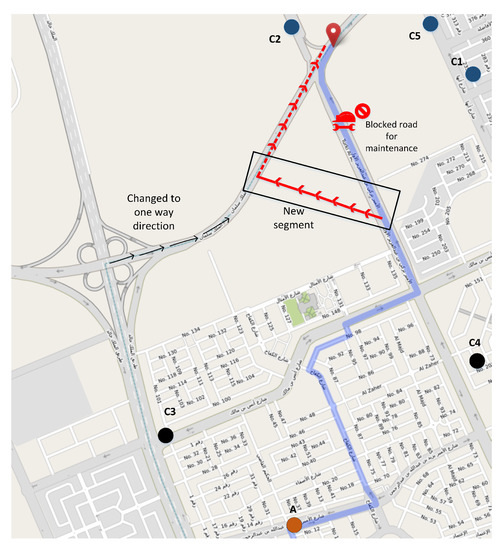
به عنوان مثال، برای کاربر A که به مقصد H در حال رانندگی است، سیستم یک ترافیک سبک را تشخیص میدهد و راننده مسیرهای از پیش تعریف شده را ترک میکند، بنابراین با بررسی اعتبار سایر وسایل نقلیه که مسیر مشابهی را طی میکنند، مشخص میشود که یک جاده مسدود شده است. (در شکل 13 ، وسایل نقلیه سی1، سی2، و سی5). این سیستم یک هشدار اولیه برای هشدار به سایر رانندگانی که در همان جهت حرکت می کنند ارسال می کند و بر اساس اطلاعات بازخورد دیگران (به عنوان مثال، وسایل نقلیه) جاده های جایگزین (که به طور موقت باز هستند) را پیشنهاد می کند. سی3و سی4در شکل 13 ). به دلیل ساخت و ساز، یک جاده موقت می تواند یک بخش جدید یا یک مسیر تغییر یافته باشد (به عنوان مثال، خطوط چین در شکل 13 ).
ماژول ARM از دو بخش تشکیل شده است. اولین مورد، ماژول تشخیصی روی خودرو است که ارتباط را از رایانه های خودرو و دستگاه های تلفن همراه امکان پذیر می کند. این ماژول از استاندارد OBD2 برای خواندن وضعیت خودرو استفاده می کند و داده ها در دستگاه تلفن همراه پردازش می شوند. حسگرهای موجود در دستگاه تلفن همراه برای به دست آوردن اطلاعات در مورد شرایط محیطی استفاده می شوند. این سنسورها عبارتند از:
-
قطب نما/ مغناطیس سنج: این سنسور برای تعیین سمت خودرو بر اساس میدان مغناطیسی زمین استفاده می شود [ 40 ].
-
شتاب سنج: این سنسور برای تعیین حرکت سریع در ایکس،Y،زتبرها به عبارت دیگر، از این سنسور می توان برای نظارت بر لرزش خودرو استفاده کرد که می تواند وضعیت جاده را نشان دهد [ 41 ].
-
ژیروسکوپ: این سنسور برای تعیین شیب در محورهای سه بعدی استفاده می شود [ 40 ].
-
ارتفاع سنج: از این سنسور برای تعیین ارتفاع جاده از نظر سطح دریا استفاده می شود. این حسگر بسیار مفید است اگر جاده در یک منطقه مسطح واقع نشده باشد، اما برای مثال، روی یک تپه [ 40 ].
-
GPS (سیستم موقعیت یاب جهانی): این سنسور برای تعیین مکان دقیق وسیله نقلیه بر روی نقشه، بر اساس موقعیت جغرافیایی و طول جغرافیایی استفاده می شود [ 40 ، 41 ].
4.1.2. بازخورد کاربر
بازخورد کاربران به عنوان اطلاعات اضافی در مورد یک رویداد استفاده می شود. به عنوان مثال، هنگامی که تصادفی رخ می دهد، AMR فقط می تواند یک ترافیک احتمالی را تشخیص دهد، اما هیچ اطلاعاتی در مورد خود رویداد واقعی دریافت نمی کند. بنابراین، این وظیفه کاربر است که یک گزارش اضافی به سیستم P2P بدهد تا سایر کاربران از ماهیت دقیق رویداد مطلع شوند. علاوه بر این، تراکم ترافیک یا سطح ازدحام را می توان با الگوی رانندگی وسایل نقلیه نزدیک تعیین کرد.
4.1.3. ورودی های مقامات
مقامات راه و ترافیک از ورودیهای دادهها برای پیشبینی تراکم ترافیک به دلیل کارهای جادهای برنامهریزیشده و تعمیر و نگهداری یا رویدادهایی که یک جاده را به طور جزئی یا کامل مسدود میکنند، استفاده میکنند. علاوه بر این، مقامات یک ارزیابی از بهروزرسانیهای جدید را که قبلاً روی نقشه وجود داشت، توسط رویکردها انجام خواهند داد. علاوه بر این، مقامات مسئول بهروزرسانی اطلاعات در مورد ازدحامهای ترافیکی احتمالی در آینده هستند تا از انتخاب مسیر به یک مکان مشکلزا توسط کاربران یا سیستمهای ناوبری جلوگیری کنند.
4.2. مدیر خدمات خودکار
مدیر سرویس خودکار به عنوان یک مکانیک خصوصی عمل می کند که عملکرد و وضعیت خودرو را کنترل می کند. ماژول وضعیت وسیله نقلیه را از طریق یک پورت OBD2 بی سیم از طریق رایانه داخلی خود می خواند، جایی که داده ها تجزیه و تحلیل خواهند شد [ 42 ]. مدیر سرویس خودکار پیشنهاداتی را به راننده ارائه می دهد و او را به عنوان مثال، بر اساس نیاز راننده به نزدیکترین ایستگاه خدمات راهنمایی می کند.
در طول یک رانندگی طولانی، برخی از افراد معمولاً از وضعیت وسایل نقلیه خود مانند سوخت باقی مانده یا دمای موتور بی اطلاع هستند. اگر آنها به مکان های جدید و ناآشنا رانندگی می کنند، این می تواند مشکل ساز شود. با روش IME، سیستم با کامپیوتر سواری خودرو یکپارچه می شود تا مناسب ترین و نزدیک ترین ایستگاه خدمات را تعیین کند. به عنوان مثال، اگر رایانه سواری تشخیص دهد که سوخت باقیمانده فقط برای مسافت 100 کیلومتر دوام می آورد، سیستم به طور خودکار پمپ بنزین هایی را که در نزدیکی قرار دارند، مطابق جهتی که وسیله نقلیه در حرکت است، پیشنهاد می کند.
علاوه بر این، هنگامی که رایانه سواری افزایش شدید دمای موتور را تشخیص دهد، سیستم به طور خودکار نزدیکترین ایستگاه خدمات را پیدا کرده و به راننده پیشنهاد میکند که وسیله نقلیه را به آن ببرد.
4.3. چراغ اضطراری خودکار
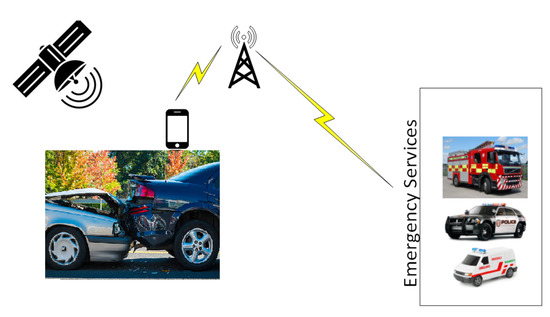
در صورت تشخیص تصادف، روشن به عنوان یک سیگنال خطر برای تمام ایستگاه های اضطراری عمل می کند. با خواندن وضعیت خودرو، GPS و وضعیت محیطی، سیستم نظارت خواهد کرد که آیا تصادف رخ داده است یا خیر. این کار گزارش اضطراری را تسریع می کند و متعاقباً پاسخ سریع واحدهای اورژانس را تضمین می کند.
تصادفات وسایل نقلیه یک اتفاق رایج در جاده ها است و می تواند منجر به مرگ شود. یک تصادف جاده ای می تواند یک یا چند وسیله نقلیه را درگیر کند و می تواند ناشی از عواملی مانند خطای وسیله نقلیه یا خطای راننده باشد. در برخی از تصادفات جاده ای، به ویژه در یک جاده، راننده و مسافران ممکن است بیهوش باشند یا به کمک اضطراری نیاز داشته باشند. تنها شانس زنده ماندن آنها ممکن است بستگی به این دارد که سایر رانندگان آنها را ببینند و با خدمات اورژانس تماس بگیرند. با این حال، در مناطق روستایی یا دورافتاده، محل حادثه ممکن است توسط دیگران دیده نشود یا زمانی که خیلی دیر شده است، آن را ببینند. چراغ اضطراری خودکار در IME مشابه سیستم اضطراری مبتنی بر مکان کار می کند. البته علاوه بر این ضربه وارد شده به خودرو را تشخیص داده و خسارت وارده به آن را محاسبه خواهد کرد. از آنجایی که این سیستم مستقل از خودرو کار می کند،
شکل 14 نحوه عملکرد یک چراغ اضطراری خودکار را نشان می دهد. این سیستم در هنگام تماس با نزدیکترین خدمات اضطراری بر اساس محل حادثه به شبکه تلفن همراه متکی است.
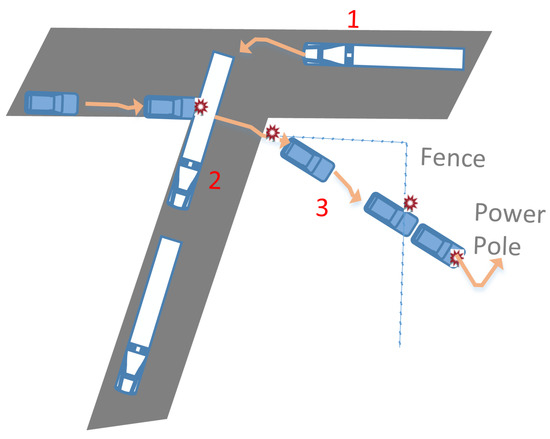
اگر تصادفی چند وسیله نقلیه داشته باشد، تعداد چراغ های اضطراری ارسال شده به اورژانس نشان دهنده تعداد خودروهای درگیر در تصادف خواهد بود. مکان ارسال شده به خدمات اورژانس، محل وقوع ضربه و مکان نهایی پس از برخورد خواهد بود، زیرا در برخی موارد، مکان نهایی خودرو ممکن است با محل برخورد اولیه متفاوت باشد، همانطور که در شکل 15 در زیر نشان داده شده است.
شکل 15 یک تسلا مدل S در شمال فلوریدا را در ژوئیه 2016 نشان می دهد که با کامیونی که جلوی آن در حال چرخش به چپ بود برخورد کرد [ 43 ]. سپس تسلا از جاده خارج شد و قبل از توقف به حصار و تیر برق برخورد کرد. همانطور که از این شکل مشخص است، محل برخورد و محل نهایی خودرو متفاوت بوده است. در برخی موارد، یافتن مکان نهایی ممکن است بسیار دشوار باشد. بنابراین، در این رویکرد، چراغ اضطراری در هنگام برخورد و پس از توقف خودرو ارسال می شود.
4.4. ماژول های تحلیل
این ماژول مقدار جامعی از داده های ترافیکی و الگوهای حرکت مردم را ارائه می دهد که می تواند توسط مقامات برای مدیریت جاده و شرایط ترافیکی یا برنامه ریزی توسعه شهر استفاده شود. سه ماژول تحلیل وجود دارد: نظارت بر کیفیت جاده، نظارت بر ترافیک در زمان واقعی، و انحراف و مدیریت ترافیک. در ادامه این قسمت ها توضیح داده شده است.
4.4.1. نظارت بر کیفیت جاده ها
حسگرهای متحرکی که برای بهبود مستقل جاده استفاده میشوند، میتوانند برای حس کردن لرزش خودرو در حین حرکت برنامهریزی شوند. خوانش ارتعاشات را می توان ثبت کرد و برای تعیین وضعیت جاده در یک منطقه خاص استفاده کرد. با استفاده از دادههای جادهای که مستقیماً و بهطور ناشناس از کاربران جمعآوری میشود، مقامات میتوانند وضعیت یک جاده را در زمان واقعی نظارت کنند و آنها را قادر میسازد تا تعمیر و نگهداری جاده را در مکان مناسب که نیاز است برنامهریزی کنند.
4.4.2. نظارت بر حرکت شهروندی
ارتقای جاده مستقل برای ردیابی حرکت وسایل نقلیه به صورت ناشناس است. برای توسعه بلندمدت شهر می توان از گزارش داده های ردیابی منظم برای به دست آوردن الگوهای حرکتی شهروندان استفاده کرد. این الگوها بسیار مفید هستند زیرا مقامات را قادر میسازد تا ترافیک را به طور موثر در یک مکان خاص مدیریت کنند و دادههای مرتبط با ترافیک را به دست آورند مانند: (الف) دورههای شلوغی یک منطقه. ب) شلوغ ترین تقاطع ها؛ ج) جاده هایی که بیشترین ترافیک را دارند. و (د) مقدار زمانی که مردم در جاده می گذرانند.
4.4.3. نظارت بر ترافیک در زمان واقعی
تراکم ترافیک را می توان با تجزیه و تحلیل تعداد وسایل نقلیه در یک بخش معین از جاده، سرعت، جهت، الگوی ترمز و وضعیت خودرو تعیین کرد. تراکم بالای ترافیک یکی از دلایل اصلی ترافیک است. بنابراین، در یک سیستم ناوبری بلادرنگ، تشخیص زودهنگام ترافیک احتمالی بسیار مهم است. با شناسایی تراکم ترافیک، یک سیستم ناوبری میتواند به رانندگان هشدار دهد که حتی قبل از ایجاد ترافیک از جاده اجتناب کنند و مقامات راهنمایی و رانندگی میتوانند برنامههای اضطراری را برای جلوگیری از ترافیک سازماندهی کنند.
4.5. سیستم ناوبری
سیستم ناوبری یکی از ماژولهای اصلی در رویکرد ما است، که در آن راننده میتواند با استفاده از نقشههای موجود و شرایط جاده، ترافیک، اختلالات و مسیرهای جدید یا احتمالی مسیریابی کند. روش ارتقای نقشه مستقل شامل مجموعه ای از رویکردها است که با هم کار می کنند تا به یک تغییر غیرمنتظره در شرایط جاده پاسخ دهند. هدف این است که ابزاری را فراهم کنیم که از طریق آن کاربران بتوانند از یک سیستم نقشه استفاده کنند که بتواند با تغییرات اخیر و غیرمنتظره سازگار شود.
4.6. شناسایی قطعه جاده جدید
اکثر شهرها برنامه های توسعه مداوم دارند، به ویژه از نظر جاده ها، که رفت و آمد مردم را تسهیل می کند. با این حال، به روز رسانی جاده ها در سیستم های ناوبری همیشه در زمان واقعی اتفاق نمی افتد، به خصوص برای جاده هایی که برای اهداف تعمیر و نگهداری برای چند ساعت بسته هستند. این جادهها به احتمال زیاد در سرویسهای GPS بهروزرسانی نمیشوند، زیرا بررسی گزارشدهی زمان زیادی طول میکشد. در واقع، در بیشتر موارد، این جاده ها قبل از تایید آپلود توسط سرویس GPS، به وضعیت اولیه خود باز می گردند. با این حال، در این میان، هزاران مسافر تحت تأثیر این نقشه های جاده ای به روز نشده، به ویژه در شهرهای بزرگ قرار گرفته اند.
با روش بهبود مستقل جاده پیشنهادی، هر بار که کاربر در امتداد بخش ناشناس جاده حرکت می کند، این مسیر به عنوان کاندیدای بخش جاده جدید در نظر گرفته می شود. بر اساس تعداد کاربران این بخش جدید جاده، سرعت وسیله نقلیه، خواندن کیفیت جاده و مسیرهای خودرو، روش IME می تواند به طور خودکار تعیین کند که آیا مسیر جدید یک بخش جدید از جاده است یا خیر. توجه داشته باشید که وسایل نقلیه از طریق یک شبکه ad hoc برد (یا زیرساخت ابری) با یکدیگر ارتباط برقرار می کنند. بنابراین، سیستم ناوبری را می توان (در مدت زمان بسیار کوتاه) برای استفاده از بخش جاده جدید برای بهبود تجربیات کاربر با یک سیستم ناوبری به روز کرد. توجه داشته باشید که از آنجایی که هدف یک بخش جدید موقت است،
4.7. سیستم انحرافی جاده جدید
در برخی شهرها، مقامات راهنمایی و رانندگی ممکن است به منظور کنترل ترافیک نیاز به تغییر موقت یک مسیر خاص داشته باشند. همانطور که قبلا ذکر شد، سیستم ناوبری فعلی ممکن است بتواند به سرعت با تغییرات سازگار شود. با تجزیه و تحلیل الگوی حرکت کاربران، می توان از IME برای تعیین اینکه آیا تغییراتی در مسیر وجود دارد یا خیر (تشخیص انحراف جاده) استفاده کرد. تشخیص سریع تغییر مسیر ترافیک در یک سیستم ناوبری بسیار مهم است زیرا ممکن است همه کاربران از تغییرات آگاه نباشند و ممکن است خود را در یک نقطه تنگ در جاده بیابند. توجه داشته باشید که سیستم انحرافی جاده جدید بر تشخیص انحراف جاده ای که توسط مقامات برای کنترل مدیریت جاده ها ایجاد شده است تمرکز خواهد کرد.
5. بحث و کاربردهای بالقوه
همانطور که قبلاً ذکر شد، سرویسهای GPS فعلی بهروزرسانی سریع شرایط تغییر یافته در شبکه جادهای فضایی را انجام نمیدهند. این موضوع در برخی از شهرها رایج است که رانندگان مجبور می شوند به طور ناگهانی به دنبال راه های جایگزین برای مقصد خود به دلیل تعمیر و نگهداری راه ها بگردند. بنابراین، رویکردهای ارتقای نقشه مستقل سعی در بهبود جنبههای مختلف شبکههای جادهای فضایی به منظور کمک به کاربران جاده در رسیدن به مقصد خود داشتهاند. با استفاده از سیستم P2P، که در آن همتایان بر اساس مفهوم همسایگی به هم متصل می شوند، مؤلفه نظارت خودکار جاده (ARM) وضعیت جاده را ثبت می کند و گزارش را به سیستم ارسال می کند، که مشخص می کند آیا جاده قابل دسترسی است یا خیر.
آثاری وجود دارد که بر کنترل ارتباطات ترافیکی مبتنی بر هوش ازدحام متمرکز شدهاند که از بهینهسازی ازدحام ذرات الهام گرفته شده است [ 44 ]. علاوه بر این، برخی از کارها بر روی رویکردهای هوش ازدحامی برای یافتن برنامههای چرخه موفق چراغهای راهنمایی متمرکز شدند [ 45 ]]. اکثر آثار از هوش ازدحامی برای ترافیک جادهای استفاده میکردند تا ترافیک سبک را پیدا کنند یا پیوندهای ترافیکی را بر اساس فعل و انفعالات اشیاء کنترل کنند. در این مقاله، رویکرد هوش ازدحام در رویکردها تطبیق داده نشده است. جهت اصلی مقاله به روز رسانی شبکه جاده های فضایی واقعی است که از طریق ارتباطات P2P مسدود شده (یا بسته شده یا بخش جدیدی ایجاد شده است) به دلیل نگهداری در شهرهای در حال توسعه، که موضوع اساسی است که ممکن است باعث تراکم ترافیک در شهر شود. اولین مکان.
شهرها انواع مختلفی از داده های مکانی را تولید می کنند. در سالهای اخیر، ازدحام ترافیک به دلیل عدم دقت و بهروزرسانی دیرهنگام راههای فعلی به یک معضل جدی تبدیل شده است که نه تنها باعث خسارات اقتصادی شده، بلکه بر کیفیت زندگی ساکنان شهر نیز تأثیر منفی گذاشته است .]. بنابراین، ارتقای نقشه مستقل پیشنهادی میتواند نقش مهمی در مدیریت ترافیک برای افزایش صلاحیت و ایمنی حملونقل شهری داشته باشد. به عنوان مثال، شناسایی بخش جدید جاده به بهروزرسانی سریع جادهها در سیستمهای ناوبری کمک میکند، بهویژه برای جادههایی که برای مدت کوتاهی به منظور تعمیر و نگهداری بسته هستند، مشابه سیستم انحراف جادهای جدید، که تعیین میکند آیا بهروزرسانیهایی در مسیر وجود دارد یا خیر. مسیر (تشخیص انحراف جاده)، که عمدتاً به مدیریت ترافیک کمک می کند.
علاوه بر این، تاخیر در ترافیک نه تنها باعث اتلاف وقت نمی شود، بلکه باعث هدر رفتن هزینه ها نیز می شود و از این رو، سیستم های ترافیکی هوشمند از جمله راهکارهای مهم شهر هوشمند برای مسائل جاده و ترافیک در شهرهای در حال توسعه هستند. از طریق به روز رسانی سیستم P2P، همه ماژول های پیشنهادی به نفع راه حل های ترافیک شهر هوشمند هستند. به عنوان مثال، مدیر سرویس خودکار به راننده پیشنهاداتی می دهد و بر اساس نیاز خود او را راهنمایی می کند. این امر مدیریت ترافیک را به میزان قابل توجهی افزایش می دهد. علاوه بر این، چراغ اضطراری خودکار همچنین می تواند به عنوان یک سیگنال خطر برای تمام ایستگاه های اضطراری در صورت شناسایی حادثه عمل کند، همچنین گزارش اضطراری را تسریع کرده و متعاقباً از پاسخ سریع واحدهای اورژانس اطمینان حاصل می کند.
علاوه بر این، یک مدیر سرویس خودکار عملکرد و وضعیت خودرو را نظارت خواهد کرد. بر اساس دادههایی که از مدیر سرویس خودکار بهدست میآید، سیستم میتواند بر اساس نیاز راننده به راننده پیشنهاد دهد. با رویکردهای بهبود مستقل جاده، هر بار که کاربر در امتداد بخش ناشناس جاده حرکت می کند، یک مسیر ناشناس به عنوان کاندیدای بخش جاده جدید از طریق سیستم P2P در نظر گرفته می شود. سپس بر اساس تعداد کاربران این بخش جدید جاده و برخی جنبههای دیگر مانند سرعت خودرو و جهت خودرو، روش IME میتواند مسیر را بهعنوان بخش جدید جاده بهطور خودکار تعیین کند.
کاربردهای بالقوه زیادی وجود دارد که می توان از این تحقیق استخراج کرد:
-
سیستمی که میتواند به طور مستقل برای نظارت بر شرایط جادهها و بهویژه برای بهروزرسانی نقشهها برای شامل جادههای تازهساخته اجرا شود.
-
سیستمی که میتواند تراکم جادهها، تراکم ترافیک و حرکت افراد را در زمانهای خاص تجزیه و تحلیل کند تا شبکه ترافیکی بهتری تولید کند و مدیریت راه را بهبود بخشد.
-
نظارت مستمر بر رفتار راننده برای تعیین واکنش افراد به بخش خاصی از جاده یا منطقه خاصی.
-
یک سیستم ناوبری مسیریابی بهتر که جدیدترین تغییرات شبکه جاده را در نظر می گیرد.
-
سیستمی که در آن مقامات می توانند به سرعت اطلاعاتی در مورد اختلالات احتمالی جاده ارائه کنند تا کاربران بتوانند در اسرع وقت از این مکان ها اجتناب کنند.
-
سیستمی که میتواند نزدیکترین ایستگاههای خدمات یا سایر امکاناتی که ممکن است مورد نیاز باشد را بر اساس خوانشهای رایانه سواری خودرو به راننده پیشنهاد دهد.
-
سیستمی که می تواند به عنوان یک زنگ اضطراری خودکار در هنگام مواجهه با حادثه عمل کند تا خدمات اورژانسی بتوانند به سرعت پاسخ دهند.
همانطور که قبلا ذکر شد، این کار تنها بر ایده ها و رویکردهای مفهومی تمرکز دارد. علاوه بر این، ارزیابی های کیفیت (خطاهای وسایل نقلیه) جنبه بسیار مهمی است که باید در کارهای آینده مورد توجه قرار گیرد. همانطور که واضح است، این کار ارزیابی ماژول های پیشنهادی را در نظر نمی گیرد. بنابراین، اقدامات تحقیقاتی آینده می تواند بر توسعه الگوریتم های دقیق برای نظارت خودکار جاده ها (ARM) تمرکز کند، که وظیفه نظارت بر وضعیت هر وسیله نقلیه (مانند سرعت، فرکانس های شکست) را بر عهده خواهد داشت، که می تواند از رایانه سواری خودرو به دست آید. . با استفاده از این داده ها علاوه بر مکان و ارتفاع وسیله نقلیه، ARM وضعیت جاده را بر اساس داده های به دست آمده از سیستم محله P2P ثبت می کند و وضعیت یک جاده خاص را به سرعت و با دقت گزارش می دهد. علاوه بر این، میتوان مدلی طراحی کرد که بازخورد کاربران را در مورد رویداد واقعی که باعث ترافیک میشود، در بر گیرد. بنابراین، سیستم همسایگی P2P برای ارائه گزارشهای اضافی به کاربران متکی است تا سایر کاربران ماهیت رویداد را بدانند و تراکم یا سطح تراکم ترافیک را میتوان با رفتارهای رانندگی کاربران در وسایل نقلیه مجاور تعیین کرد. یک مدیر سرویس خودکار میتواند پیشنهاداتی را به راننده ارائه کند و او را به نزدیکترین مرکز مورد نیاز مانند ایستگاه خدمات راهنمایی کند. این ماژول همچنین می تواند طیف گسترده ای از داده های ترافیکی و الگوهای حرکت افراد را ارائه دهد. هدف کلی ارائه سیستمی است که به موجب آن کاربران بتوانند از یک سیستم نقشه اخیر استفاده کنند که با تغییرات ناگهانی شرایط جاده سازگار است و جزئیاتی را در مورد آن ارائه می دهد. سیستم همسایگی P2P برای ارائه گزارشهای اضافی به کاربران متکی است تا سایر کاربران ماهیت رویداد را بدانند، و تراکم یا سطح تراکم ترافیک را میتوان با رفتارهای رانندگی کاربران در وسایل نقلیه نزدیک تعیین کرد. یک مدیر سرویس خودکار میتواند پیشنهاداتی را به راننده ارائه کند و او را به نزدیکترین مرکز مورد نیاز مانند ایستگاه خدمات راهنمایی کند. این ماژول همچنین می تواند طیف گسترده ای از داده های ترافیکی و الگوهای حرکت افراد را ارائه دهد. هدف کلی ارائه سیستمی است که به موجب آن کاربران بتوانند از یک سیستم نقشه اخیر استفاده کنند که با تغییرات ناگهانی شرایط جاده سازگار است و جزئیاتی را در مورد آن ارائه می دهد. سیستم همسایگی P2P برای ارائه گزارشهای اضافی به کاربران متکی است تا سایر کاربران ماهیت رویداد را بدانند، و تراکم یا سطح تراکم ترافیک را میتوان با رفتارهای رانندگی کاربران در وسایل نقلیه نزدیک تعیین کرد. یک مدیر سرویس خودکار میتواند پیشنهاداتی را به راننده ارائه کند و او را به نزدیکترین مرکز مورد نیاز مانند ایستگاه خدمات راهنمایی کند. این ماژول همچنین می تواند طیف گسترده ای از داده های ترافیکی و الگوهای حرکت افراد را ارائه دهد. هدف کلی ارائه سیستمی است که به موجب آن کاربران بتوانند از یک سیستم نقشه اخیر استفاده کنند که با تغییرات ناگهانی شرایط جاده سازگار است و جزئیاتی را در مورد آن ارائه می دهد. یک مدیر سرویس خودکار میتواند پیشنهاداتی را به راننده ارائه کند و او را به نزدیکترین مرکز مورد نیاز مانند ایستگاه خدمات راهنمایی کند. این ماژول همچنین می تواند طیف گسترده ای از داده های ترافیکی و الگوهای حرکت افراد را ارائه دهد. هدف کلی ارائه سیستمی است که به موجب آن کاربران بتوانند از یک سیستم نقشه اخیر استفاده کنند که با تغییرات ناگهانی شرایط جاده سازگار است و جزئیاتی را در مورد آن ارائه می دهد. یک مدیر سرویس خودکار میتواند پیشنهاداتی را به راننده ارائه کند و او را به نزدیکترین مرکز مورد نیاز مانند ایستگاه خدمات راهنمایی کند. این ماژول همچنین می تواند طیف گسترده ای از داده های ترافیکی و الگوهای حرکت افراد را ارائه دهد. هدف کلی ارائه سیستمی است که به موجب آن کاربران بتوانند از یک سیستم نقشه اخیر استفاده کنند که با تغییرات ناگهانی شرایط جاده سازگار است و جزئیاتی را در مورد آن ارائه می دهد.
6. نتیجه گیری
این مقاله مزایای داشتن مکانیزم بهروزرسانی همتا به همتا را برای شبکههای جادهای فضایی مورد بحث قرار میدهد. در بسیاری از شهرها، اگر تغییرات زیادی در شرایط جاده به دلیل کارهای تعمیر و نگهداری ایجاد شود، شبکه راه های فضایی به اندازه کافی یا به سرعت به روز نمی شود. بنابراین، زمانی که کاربر قصد سفر به یک مکان خاص را دارد، ممکن است به دلیل تغییر شرایط جاده نتواند مسیر معمول خود را طی کند، اما دادههای شبکه راه فضایی در GPS بهروزرسانی نمیشوند. این می تواند از بسیاری جهات روی کاربر تأثیر بگذارد. برای مثال، سفری که معمولاً پنج دقیقه طول میکشد، اکنون ممکن است نیم ساعت طول بکشد. شهر ریاض در عربستان سعودی به عنوان مطالعه موردی انتخاب شده است زیرا ساخت مترو این نوع مشکلات را ایجاد می کند. از این رو، هدف این کار بررسی مزایای استفاده از مکانیزم بهروزرسانی همتا به همتا برای کمک به کاربر برای یافتن مسیر جایگزین است، زمانی که جاده معمولاً به دلیل تغییر شرایط جاده دیگر قابل ارزیابی نیست. توجه داشته باشید که این کار تنها بر روی ایدهها و رویکردهای مفهومی تمرکز میکند تا به بهبود نقشه مستقل دست یابد.
علاوه بر این، مزایا و کاربردهای احتمالی زیادی از این رویکرد وجود دارد که می تواند به طور مستقل برای نظارت بر شرایط جاده اجرا شود. به عنوان مثال، میتوان از آن برای بهروزرسانی نقشههای جادههای تازهساخته، ارائه سیستمی برای تحلیل تراکم جادهها، ارائه سیستمی برای تجزیه و تحلیل تراکم ترافیک و حرکت افراد در یک زمان خاص استفاده کرد. علاوه بر این، برنامههایی را میتوان توسعه داد که رفتارها و واکنشهای رانندگان را در بخشهایی از جادهها یا در یک منطقه خاص نظارت میکنند.
منابع
- لی، ز. چن، ال. Wang, Y. G*-tree: یک شاخص فضایی کارآمد در شبکه های جاده ای. در مجموعه مقالات سی و پنجمین کنفرانس بین المللی مهندسی داده IEEE 2019 (ICDE)، ماکائو، چین، 8 تا 11 آوریل 2019؛ صص 268-279. [ Google Scholar ]
- علمری، س. تانیار، د. Safar, M. طبقه بندی برای پرس و جوهای شی متحرک در پایگاه داده های فضایی. ژنرال آینده. محاسبه کنید. سیستم 2014 ، 37 ، 232-242. [ Google Scholar ] [ CrossRef ]
- یائو، ایکس. جیانگ، ایکس. وانگ، دی. یانگ، ال. پنگ، ال. چی، تی. استخراج کارآمد حداکثر هممکانها در یک میدان پیوسته فضایی تحت شبکههای جادهای هدایتشده. Inf. علمی 2020 ، 542 ، 357-379. [ Google Scholar ] [ CrossRef ]
- علمری، س. تانیار، د. Safar, M. نمایه سازی اجسام متحرک برای جستارهای جهت و سرعت. Inf. سیستم جلو. 2013 ، 15 ، 235-248. [ Google Scholar ] [ CrossRef ]
- علمری، س. تانیار، د. صفر، م. الخالدی، ح. ردیابی اجسام متحرک با استفاده از نمایه سازی توپوگرافی. موافق محاسبه کنید. تمرین کنید. انقضا 2013 ، 27 ، 1951-1965. [ Google Scholar ] [ CrossRef ]
- کیم، ک.-اس. کیم، S.-W. کیم، T.-W. لی، ک.-جی. روش نمایه سازی و به روز رسانی سریع برای جابجایی اشیاء در شبکه های جاده ای. در مجموعه مقالات چهارمین کنفرانس بین المللی کارگاه های مهندسی سیستم های اطلاعات وب، WISEW’03، رم، ایتالیا، 13 دسامبر 2003; صص 34-42. [ Google Scholar ]
- علمری، س. تانیار، د. نگوین، ک. Alamri، A. C-tree: نمایه سازی کارآمد مبتنی بر سلول از اشیاء متحرک داخلی. J. محیط. هوشمند اومانیز. محاسبه کنید. 2020 ، 11 ، 2841-2857. [ Google Scholar ] [ CrossRef ]
- اسلام، ام اس; شن، بی. وانگ، سی. تانیار، د. Wang, J. پردازش کارآمد پرس و جوهای معکوس نزدیکترین محله در پایگاه داده های فضایی. Inf. سیستم 2020 ، 92 ، 101530. [ Google Scholar ] [ CrossRef ]
- لین، اچ. پنگ، ال. چن، اس. لیو، تی. چی، تی. نمایه سازی برای اجسام متحرک در فضاهای داخلی چند طبقه که از پرس و جوهای معنایی پیچیده پشتیبانی می کند. ISPRS Int. J. Geo Inf 2020 ، 5 ، 176. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- شائو، ز. Cheema، MA; تانیار، دی. پرسش های برنامه ریزی سفر در مکان های داخلی. محاسبه کنید. J. 2018 ، 61 ، 409-426. [ Google Scholar ] [ CrossRef ]
- پارک، اس. پارک، اس. پردازش پرس و جو کلمات کلیدی فضایی جمعی در شبکه های جاده ای با ساختار شاخص درختی g. Inf. سیستم 2019 ، 84 ، 49-62. [ Google Scholar ] [ CrossRef ]
- هارو، ف. زیرول، ا. Sun، Y. نظارت بر تراکم ترافیک با استفاده از یک استراتژی kNN بهبود یافته. Measurement 2020 , 156 , 107534. [ Google Scholar ] [ CrossRef ]
- ژانگ، دی. Jiang, Y. طراحی سیستم نظارت بر وضعیت تراکم ترافیک هوشمند شهری بر اساس داده های بزرگ. در مجموعه مقالات کنفرانس بین المللی 2020 حمل و نقل هوشمند، داده های بزرگ و شهر هوشمند (ICITBS)، وینتیان، لائوس، 11 تا 12 ژانویه 2020؛ صص 2-15. [ Google Scholar ]
- جین، NK; ساینی، ر.ک. میتال، پی. مروری بر تکنیکهای سیستم نظارت بر ترافیک. محاسبات نرم. نظریه. Appl. 2019 ، 742 ، 569-577. [ Google Scholar ]
- چانگ، J.-W. ام، J.-H. LeeP، W.-C. یک طرح نمایه سازی مسیر جدید برای اجسام متحرک در شبکه های جاده ای در یادداشت های سخنرانی در علوم کامپیوتر، مجموعه مقالات رسیدگی به اطلاعات انعطاف پذیر و کارآمد، بلفاست، انگلستان، 18-20 ژوئیه 2006 . Springer: برلین/هایدلبرگ، آلمان، 2006; جلد 4042، ص 291–294. [ Google Scholar ]
- هاریانتو، AA؛ اسلام، ام اس; تانیار، د. Aamir Cheema، M. Ig-tree: یک شاخص کلیدواژه فضایی کارآمد برای برنامهریزی جستجوهای بهترین مسیر در شبکههای جادهای. شبکه جهانی وب 2019 ، 22 ، 1359–1399. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- متعجب.؛ لی، دی ال. لی، VCS نمایه سازی فاصله در شبکه های جاده ای. در مجموعه مقالات سی و دومین کنفرانس بین المللی پایگاه های داده بسیار بزرگ، VLDB ’06، سئول، کره، 12-15 سپتامبر 2006. صص 894-905. [ Google Scholar ]
- وو، ال. شیائو، ایکس. دنگ، دی. کنگ، جی. زو، AD; ژو، اس. پرسش های کوتاه ترین مسیر و فاصله در شبکه های جاده ای: یک ارزیابی تجربی. Proc. VLDB Endow 2012 ، 5 ، 406-417. [ Google Scholar ] [ CrossRef ]
- Dijkstra، EW یادداشتی در مورد دو مشکل در ارتباط با نمودارها. عدد. ریاضی. 1959 ، 1 ، 269-271. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- تانیار، د. Rahayu، JW طبقهبندی برای پرسشهای نزدیکترین همسایه در پایگاههای داده فضایی. جی. کامپیوتر. سیستم علمی 2013 ، 79 ، 1017-1039. [ Google Scholar ] [ CrossRef ]
- وانگ، ی. چن، ی. بله، اف. لیو، اچ. یانگ، جی. پیامدهای نشت حریم خصوصی کاربران گوشی های هوشمند از دیدگاه تبلیغ کننده. اوباش فراگیر. محاسبه کنید. 2019 ، 53 ، 13-32. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- ژوان، ک. ژائو، جی. تانیار، د. صفر، م. Srinivasan، B. پردازش جستجوی محدوده محدود در شبکه های جاده ای. موافق محاسبه کنید. تمرین کنید. انقضا 2011 ، 23 ، 491-504. [ Google Scholar ] [ CrossRef ]
- تانیار، د. Rahayu، JW طبقه بندی برای پرس و جوهای منطقه در پایگاه داده های فضایی. جی. کامپیوتر. سیستم علمی 2015 ، 81 ، 1508-1531. [ Google Scholar ] [ CrossRef ]
- ژائو، جی. ژوان، ک. تانیار، د. Srinivasan، B. جستجوی افزایشی k-نزدیکترین همسایه در شبکه های جاده ای. J. اتصال. شبکه 2008 ، 9 ، 455-470. [ Google Scholar ] [ CrossRef ]
- لو، ایکس. شیا، ی. زو، س. لی، ی. تقویت فیلتر مشارکتی افزایشی مبتنی بر k نزدیکترین محله. سیستم مبتنی بر دانش 2013 ، 53 ، 90-99. [ Google Scholar ] [ CrossRef ]
- ژائو، جی. ژوان، ک. تانیار، د. صفر، م. Srinivasan، B. جستجوی مسیر محدودیت زمانی در چند مکان. بدانید. مهندس Rev. 2014 , 29 , 217-233. [ Google Scholar ] [ CrossRef ]
- حیدر، ع.- ک. تانیار، د. بتز، جی. علمری، س. در یافتن مناطق امن برای جستجوهای محدوده متحرک. ریاضی. محاسبه کنید. مدل. 2013 ، 58 ، 1449-1458. [ Google Scholar ]
- تانگ، جی. دنگ، م. هوانگ، جی. لیو، اچ. Chen, X. یک روش خودکار برای تشخیص و به روز رسانی تغییرات افزودنی در شبکه جاده با داده های مسیر GPS. ISPRS Int. J. Geo-Inf. 2019 ، 8 ، 411. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- وو، تی. شیانگ، ال. Gong, J. به روز رسانی شبکه های جاده ای با تجدید محلی از مسیرهای GPS. ISPRS Int. J. Geo-Inf. 2016 ، 5 ، 163. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- چائو، پی. هوآ، دبلیو. ژو، ایکس. مسیرها می دانند کجای نقشه اشتباه است: یک چارچوب تکراری برای بهینه سازی مشترک نقشه-مسیر. شبکه جهانی وب 2020 ، 23 ، 47–73. [ Google Scholar ] [ CrossRef ]
- استانوجویچ، آر. آببر، س. تیروموروگاناتان، اس. مورالس، GDF; چاولا، س. فیلالی، ف. Aleimat، A. تلفیق شبکه جاده ای برای به روز رسانی های نقشه افزایشی. در حال پیشرفت در خدمات مبتنی بر مکان ; Springer: Cham, Switzerland, 2018; صص 91-109. [ Google Scholar ]
- شی، دبلیو. شن، اس. Liu, Y. تولید خودکار نقشه شبکه جاده از GPS عظیم، مسیرهای خودرو. در مجموعه مقالات دوازدهمین کنفرانس بین المللی IEEE در مورد سیستم های حمل و نقل هوشمند، سنت لوئیس، MO، ایالات متحده آمریکا، 4-7 اکتبر 2009. صص 1-6. [ Google Scholar ]
- لیو، سی. شیونگ، ال. هو، ایکس. Shan, J. یک روش بافر پیشرونده برای به روز رسانی نقشه راه با استفاده از داده های نقشه خیابان باز. ISPRS Int. J. Geo-Inf. 2019 ، 4 ، 1246. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- Turiceanu، V. Waze نقشه ها و اطلاعات رانندگی را به روز نمی کند. گزارش ویندوز 2019. در دسترس آنلاین: https://windowsreport.com/waze-not-updating/ (در 27 دسامبر 2020 قابل دسترسی است).
- سیلوا، تی. د ملو، POSV; ویانا، AC؛ Almeida، JM; سالز، جی. Loureiro، AAF وضعیت ترافیک بیش از خطوط رنگی روی نقشه است: مشخص کردن هشدارهای waze. در یادداشت های سخنرانی در علوم کامپیوتر، مجموعه مقالات انفورماتیک اجتماعی، کیوتو، ژاپن، 25-27 نوامبر 2013 . انتشارات بین المللی Springer: چم، سوئیس، 2013; صص 309-318. [ Google Scholar ]
- نگیم، تی پی; مولانا، ک. نگوین، ک. گرین، دی. Waluyo، AB; تانیار، دی. معکوس دو رنگی همتا به همتا نزدیکترین همسایگان در شبکههای تکتک موبایل. J. توزیع موازی. محاسبه کنید. 2014 ، 74 ، 3128-3140. [ Google Scholar ] [ CrossRef ]
- کومار، ن. لی، جی. اچ. ذخیره سازی تعاونی همتا به همتا برای انتشار داده ها در ارتباطات وسایل نقلیه شهری. سیستم IEEE J. 2014 ، 8 ، 1136-1144. [ Google Scholar ] [ CrossRef ]
- الحیب، ن. اسلام، ام اس; تانیار، د. شائو، ز. Cheema، MA مبتنی بر تراکم جستجوی معکوس نزدیکترین محله در پایگاه داده های فضایی. J. محیط. هوشمند اومانیز. محاسبه کنید. 2018 ، 1-12. [ Google Scholar ] [ CrossRef ]
- الحیب، ن. تانیار، د. الخالدی، ح. اسلام، ام اس; Adhinugraha، مناطق ایمن KM برای جابجایی پرس و جوهای همسایگی معکوس در یک محیط همتا به همتا. دسترسی IEEE 2020 ، 8 ، 50285–50298. [ Google Scholar ] [ CrossRef ]
- عموری، ع. Alaparthy، VT; Morgera، SD یک سیستم تشخیص نفوذ مبتنی بر یادگیری ماشین برای اینترنت اشیاء تلفن همراه. Sensors 2020 , 20 , 461. [ Google Scholar ] [ CrossRef ] [ PubMed ][ نسخه سبز ]
- شعیب، م. بوش، اس. اینسل، Ö.D. شولتن، اچ. Havinga، PJM بررسی تشخیص فعالیت آنلاین با استفاده از تلفن همراه. سنسورها 2015 ، 15 ، 2059-2085. [ Google Scholar ] [ CrossRef ] [ PubMed ]
- قاسمی، ن. آسرا، ای. ویگنالیا، وی. لانتیری، سی. سیمون، ا. Imine، H. Road Safety Review به روز رسانی با استفاده از فناوری های نوآورانه برای بررسی رفتار راننده. ترانسپ Res. Procedia 2020 ، 45 ، 368-375. [ Google Scholar ] [ CrossRef ]
- راسل، ک. Singhvi، A. در تصادف مرگبار تسلا خودران. نیویورک تایمز ، 2016. [ Google Scholar ]
- تیان، دی. وی، ی. ژو، جی. ژنگ، ک. دوان، ایکس. وانگ، ی. وانگ، دبلیو. هوی، آر. Guo, P. Swarm Intelligence الهام گرفته از کنترل ترافیک تطبیقی برای شبکه های ترافیک. در یادداشت های سخنرانی موسسه علوم کامپیوتر، انفورماتیک اجتماعی و مهندسی مخابرات، مجموعه مقالات کنفرانس بین المللی شبکه های صنعتی و سیستم های هوشمند، شهر هوشی مین، ویتنام، 4 سپتامبر 2017 ؛ Springer: Cham، سوئیس، 2018. [ Google Scholar ]
- گارسیا نیتو، جی. آلبا، ای. Olivera، هوش AC Swarm برای برنامه ریزی چراغ راهنمایی: کاربرد در مناطق شهری واقعی. مهندس Appl. آرتیف. هوشمند 2012 ، 25 ، 274-283. [ Google Scholar ] [ CrossRef ]
- شیروژان، س. تان، دبلیو. سپاسگزار، SME Digital Twin و CyberGIS برای بهبود اتصال و اندازه گیری تأثیر برنامه ریزی ساخت و ساز زیرساخت در شهرهای هوشمند. ISPRS Int. J. Geo-Inf. 2020 ، 9 ، 240. [ Google Scholar ] [ CrossRef ]
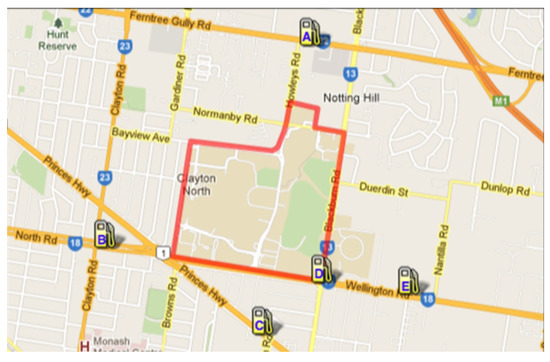
شکل 1. اشیاء فضایی در Google Maps.
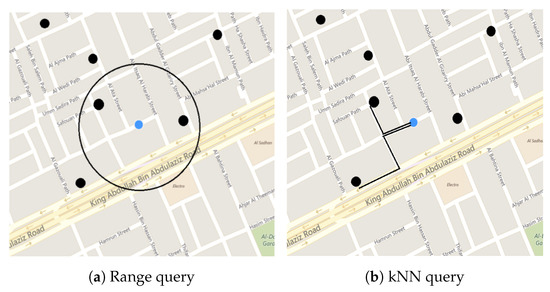
شکل 2. kNN و پرس و جوهای محدوده.
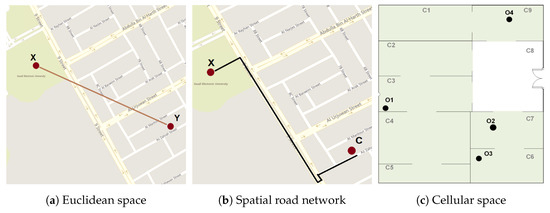
شکل 3. فضای سلولی، فضای اقلیدسی و شبکه راه های فضایی.
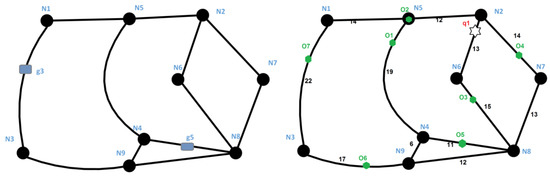
شکل 4. کوتاهترین فاصله شبکه و افزایشی kNN (IkNN).
شکل 5. نشان دادن جاده های جدید اضافه شده، تطبیق نقطه به بخش.

شکل 6. نمونه ای از مسیرهای بی همتا.
شکل 7. ریاض.
شکل 8. مسیریابی معمول بین A و B.
شکل 9. پلان 1 یا پلان 2 یک مسیر جایگزین از A به B است.
شکل 10. تغییر مسیر به دلیل مسدود شدن کامل جاده.
شکل 11. سیستم متمرکز و سیستم P2P.
شکل 12. معماری چارچوب نقشه مستقل.
شکل 13. نمونه ای از سناریوی نظارت خودکار جاده ها.
شکل 14. چراغ اضطراری خودکار.
شکل 15. ضربه و محل نهایی حادثه.


بدون دیدگاه