

چکیده
علاقه و استفاده از تجسم های سه بعدی برای تجزیه و تحلیل و ارتباط خطرات سیل افزایش یافته است. در همان زمان، اکوسیستمی از رابط های کاربری سه بعدی نیز در حال ظهور است. آنها با هم فرصت های بالقوه هیجان انگیزی را برای تجسم سیل ارائه می دهند. برای درک اینکه چگونه پتانسیل را به ارزش واقعی تبدیل می کنیم، باید درک بهتری از گردش کار فنی، قابلیت های سیستم های حاصل، قابلیت استفاده از آنها و پیامدهای آن برای تمرین ایجاد کنیم. با شروع با مجموعه دادههای جغرافیایی موجود، ما نمونههای اولیه تجسم مشترک و تک کاربر را توسعه میدهیم که از قابلیتهای پیشرفته سیستم واقعیت ترکیبی HoloLens 2 استفاده میکند. با استفاده از نمایشگرهای سه بعدی، ردیابی موقعیت، نقشه برداری فضایی و ردیابی دست و چشم، ما به دنبال بازگشایی قابلیتهای این ابزارها برای تمرین دادههای مکانی معنیدار هستیم. ما تجربه کاربر، عملکرد سختافزار و قابلیت استفاده این ابزارها را بررسی میکنیم و در مورد پیامدهای این فناوریها برای مدیریت ریسک سیل و برنامهریزی فضایی گستردهتر بحث میکنیم.
کلید واژه ها:
تجسم سه بعدی ؛ واقعیت ترکیبی ؛ واقعیت افزوده ؛ سیل ؛ مدیریت ریسک سیل
1. مقدمه
با تغییر آب و هوا و افزایش سطح دریاها، سیلابهای سواحل و رودخانهها یک نگرانی رو به رشد در سراسر جهان است. با افزایش پیشبینیشده در بزرگی و فراوانی سیل، درک خطرات و توسعه سیاستها برای مقابله با آنها بخشی جدایی ناپذیر از برنامهریزی شهری است. تجسم نقش مهمی در درک و انتشار اطلاعات از شبیهسازیهای سیل و مدلسازی سناریو برای برنامهریزان و همچنین مذاکره مسیرهای انطباق بین سهامداران در معرض [ 1 ، 2 ، دارد. 3 دارد.]. با توجه به ماهیت نهادی مدیریت ریسک سیل (FRM)، بیشتر تجسمهای توسعهیافته تلاش میکنند تا در زیرساختهای برنامهریزی/مدیریت ریسک موجود قرار بگیرند. این ادغام دامنه تجسم سیل را به ویژه جالب می کند، زیرا ابزارهای توسعه یافته را می توان در زمینه کاربردی تجزیه و تحلیل فضایی ریسک و ارتباط آن با ذینفعان تجزیه و تحلیل کرد.
در طول دهه گذشته، تجسم سه بعدی اثرات سیل به طور فزاینده ای در ادبیات علمی برجسته بوده است [ 1 ، 4 ، 5 ]. اینها بیشتر برای اهداف ارتباط ریسک تولید می شوند، اغلب با این فرض که دیدگاه های سه بعدی چشم انداز چشم انداز برای افراد غیر متخصص آسان تر است [ 6 ]. اگرچه بسیاری از ابزارهای توسعهیافته قانعکننده هستند، ما هنوز فاقد مطالعات تجربی برای تبدیل تازگی و ادعای درک بهتر دادهها به ارزش قابل اثبات برای کاربران هستیم. این روند مطمئناً تحت تأثیر افزایش تولید و استفاده از داده های سه بعدی (به عنوان مثال، LiDAR، ساختار از حرکت (SfM)، مدیریت اطلاعات ساختمان (BIM)) بوده است که در آن توصیف عمودی فضا پیچیده تر است [ 7 ،8 ]]. این به نوبه خود نیاز و تقاضا برای نرم افزاری را افزایش داده است که بتواند توپولوژی را در سه بعد به اندازه کافی نشان دهد و قابلیت های تعاملی و پرس و جو را ارائه دهد. با این حال، اکنون بیشتر مشاهده و تعامل با محتوای سه بعدی از طریق نمایشگرها و پنجرههای دو بعدی، آیکون، ماوس، نشانگر (WIMP) انجام میشود. این مهم است، زیرا نشانههای عمق دوچشمی، فرصت ارزشمند بالقوه برای مشاهده/دستکاری و تجربه ذاتا دادههای سه بعدی در سه بعدی را حذف میکند و تعامل را به ورودیهای صفحه کلید و ماوس محدود میکند.
همزمان، محققان در حال بررسی راههایی برای استفاده از رابطهای سه بعدی در حال ظهور برای بهبود تعامل و تجارب ادراکی از دادههای سه بعدی هستند. به ویژه در حوزه FRM، ابزارهای واقعیت افزوده موبایل برای تجسم اثرات سیل در محل (به عنوان مثال، [ 9 ، 10 ، 11 ، 12 ])، خارج از محل (به عنوان مثال، [ 13 ])، و محیط های مجازی همهجانبه توسعه یافته اند. ایجاد شده برای تجسم آینده های بالقوه برای سازگاری ساحلی [ 11 ، 14 ، 15]. این رشد در علاقه تحقیقاتی منعکس کننده توسعه نسل جدیدی از رابط های واقعیت ترکیبی (MR) است که پتانسیلی برای تغییر و به طور بالقوه بهبود تعامل و درک ما از داده های پیچیده سه بعدی دارند. هنگام بحث در مورد ابزارهای واقعیت ترکیبی، ما عمدتاً از تعریف سیستم واقعیت افزوده (AR) ارائه شده توسط آزوما [ 16 ] پیروی می کنیم، که در آن سیستم محتوای مجازی و واقعی را ترکیب می کند، در فضای سه بعدی ثبت می شود و در زمان واقعی تعاملی است. راه حل تجسم شرح داده شده در این مقاله از انواع دیگر رابط های ملموس، مانند جعبه های AR، که در آن اشیاء فیزیکی با پوشش های دیجیتالی داده ها افزوده می شوند، متمایز است (به عنوان مثال، [ 17 , 18 ]]). ما از واژه MR به جای AR به دو دلیل استفاده میکنیم: سیستمهای واقعیت افزوده اغلب بر تقویت مناظر واقعی با محتوای مجازی تمرکز میکنند، در حالی که برنامه ما بیشتر از نظر محیطزیست ناشناس است (بنابراین، در امتداد پیوستار مجازی میلگرام و کیشینو [ 19 ]. دوم، اصطلاح MR به طور گسترده توسط محققان و توسعه دهندگان برای توصیف سیستم های مبتنی بر نمایشگر روی سر برای AR/MR استفاده شده است (به عنوان مثال، [ 20 ، 21 ]).
تجسم جغرافیایی MR به عنوان یک حوزه مجزا در سه دهه گذشته در حال توسعه بوده است، اما ما اکنون در نقطه محوری هستیم، جایی که چنین ابزارهایی به اندازه کافی قابل استفاده هستند تا در کارهای معمولی معرفی شوند [ 22 ، 23 ، 24 ، 25 ]. در این رسانه، نماهای دنیای واقعی را می توان با محتوای سه بعدی ثبت شده فضایی افزود. 16 ]]. با پیشرفت در فناوری نمایش، قدرت پردازش، محاسبات ابری، بینایی کامپیوتری، ردیابی دست و چشم، ثبت و مدیریت انسداد، این ابزارها فرصت های متعددی را برای توسعه رابط های داده جایگزین فراهم می کنند. این لحظه فرصتی منحصر به فرد برای محققان و دست اندرکاران است تا کاربرد خود را در عمل داده های مکانی ارزیابی کنند.
در حالی که این روند با در دسترس بودن دستگاه های جدید جرقه زده می شود، علاقه به رابط های نوظهور مربوط به سخت افزار یا نرم افزار خاص نیست. آمیزههای محتوا و روایت از طریق رابطهای کاربری، نمایشگرها، کانالهای ورودی/خروجی واسطه میشوند تا تجربیات ادراکی منحصربهفردی از دادههای مکانی را برای کاربر ارائه دهند. هر یک از مؤلفههایی که رابطی بین دادههای زیربنایی و کاربر ایجاد میکنند، توانایی تأثیرگذاری بر درک پدیدهها را دارند، چه از نظر توپولوژی خطر (مثلاً گستره و عمق سیل)، یا روایت مرتبط (مانند درک خطر، تمایل به عمل) [ 26]. مقدمه و تفسیر قبلی نشان میدهد که رابطها تنها دستگاههای نمایشگر جدید یا سیستمهای تعاملی نیستند. آنها روابط ادراکی و تجربی چندوجهی بین انسان ها و پدیده ها هستند که با واسطه داده هایی که آنها را نشان می دهند، تجسمی هایی که سعی در انتقال آنها دارند و رابط هایی که واسطه این کاوش هستند، انجام می شود. رابط های واقعیت ترکیبی، به ویژه، به دلیل ترکیب بازخورد بصری، حسی-حرکتی و حس عمقی در تعامل با اشیاء مجازی در فضاهای واقعی، ابزار امیدوارکننده ای برای بهبود تعامل کاربر با داده های فضایی سه بعدی هستند [ 27 ، 28 ]. حس عمقی به آگاهی فرد از بدن خود در فضا/محیط اشاره دارد که هنگام استفاده از ابزار MR حفظ می شود. 28 ]]. این ماهیت چند حسی رابط ممکن است درک و تعامل با داده های پیچیده سه بعدی را بهبود بخشد. با ردیابی دستی، میتوانیم رابطهایی ایجاد کنیم که از دانش کاربر در مورد تعامل با اشیاء واقعی برای دستکاری محتوای مجازی استفاده میکند و به طور بالقوه تعامل با محتوای پیچیده سه بعدی (در مقایسه با رابط WIMP) را ساده میکند.
علاوه بر این، رابطهای واقعیت مختلط ویژگیهای متمایز و قابل توجهی را برای عمل دادههای مکانی کاربردی ارائه میدهند، بهویژه وقتی صحبت از وظایف مشترک در یک محیط مشترک میشود. به طور خاص، فضاهای قدیمی که در آنها بیشتر کارهای معمولی اتفاق می افتد، به فضاهای باز اختصاصی برای استفاده از محیط های کاملا مجازی (VR) نیاز دارند، در حالی که ممکن است بیشتر مزایای محیط های مجازی در سیستم های MR (مانند غوطه وری، سه بعدی دوچشمی، کاربر طبیعی) را به دست آوریم. رابط ها)، با ادغام انعطاف پذیرتر در فضاهای کاری. ابزارهای MR توانایی دیدن و تعامل با افراد دیگر و محیط اطراف و تعامل با ابزارهای غیر MR (مانند نقشه های کاغذی، طرح ها) را بدون نیاز به خروج از رابط حفظ می کنند. محققان متعددی این پتانسیل را در طول سالها تشخیص داده اند [ 22 ,28, 29 , 30 , 31 ]. بسیاری از تحقیقات در گذشته بر روی غلبه بر موانع فنی در پیاده سازی سیستم های MR متمرکز شده است. در حالی که دستگاه های MR فعلی هنوز در همه جا حاضر نیستند، بسیاری از زیرساخت های توسعه مورد نیاز برای ایجاد تجسم های قابل استفاده وجود دارد. این فرصتهای هیجانانگیزی را برای محققان به منظور توسعه و ارزیابی پلتفرمهای در حال ظهور برای توانایی آنها در ارائه تعامل معنادار و مفید با دادههای مکانی دقیق ارائه میدهد. علاوه بر این، کار مفهومی زیادی برای درک نقش اجزای مختلف رابط MR (دادهها، نمایش، تعامل، رویکردهای تجسم) در میانجیگری درک دادهها و پدیدههای مرتبط توسط کاربر مورد نیاز است.
این مقاله در تقاطع حالت های در حال تحول تجزیه و تحلیل خطر سیل و ارتباطات، و فناوری رابط در حال ظهور قرار دارد. هدف آن گزارش در مورد یک سیستم تجسم واقعیت ترکیبی کاربردی FRM و سپس بازکردن تعامل بین قابلیتهای رابط، تجربیات اطلاعاتی مبتنی بر عمل FRM و فضاهای کاری معاصر است. بخشهایی که در ادامه میآیند گردشهای کاری را توصیف میکنند که از طریق آن امکانسنجی توسعه ابزارهای تجسم خطر سیل MR را بررسی کردیم. رابط های تجسم حاصل؛ بازتاب انتقادی و بررسی این سیستم ها از منظر عملکرد، قابلیت استفاده و پتانسیل آنها به عنوان ابزار عملیاتی. و پتانسیل آنها برای ادغام با فضاهای فعلی و آینده عمل FRM. در اولین مورد، ما طراحی و توسعه مجموعهای از نمونههای اولیه را گزارش میکنیم که برای نشان دادن امکانات تجسم سیل MR تک کاربره و مشارکتی ایجاد شدهاند. با استفاده از مطالعه موردی مدیریت خطر سیل در امتداد ساحل رودخانه فریزر در ونکوور، ما تجسمهای سه بعدی از منطقه، اثرات مرتبط، و زیرساختهای کاهش احتمالی را توسعه میدهیم. با ادغام این تجسم در پیشرفته ترین سیستم واقعیت ترکیبی HoloLens 2، هدف ما درک قابلیت استفاده از چنین ابزارهایی است و نشان می دهد که چگونه جنبه های متمایز رابط، نتایج ادراکی تجسم سه بعدی را تغییر می دهد. با آگاهی از این تجربه، ما بحثی در مورد نگرانیهای بالقوه برای ادغام تجسمهای MR در عمل ارائه میکنیم. در نهایت، این تلاش به دنبال ارزیابی ابزارهای MR برای پتانسیل بهبود تعامل است.
2. روش شناسی
این بخش روش توسعه ابزارهای تجسم سیل واقعیت مختلط را شرح می دهد. گردش کار شامل آمادهسازی دادهها در یک محیط سیستم اطلاعات جغرافیایی (GIS)، تبدیل دادهها به اشیاء سهبعدی در CityEngine، یکپارچهسازی قابلیتهای واقعیت ترکیبی، و توسعه رابط کاربری در Unity، بر اساس کیت ابزار واقعیت ترکیبی است [ 32 ]. این گردش کار توسعه، آینه تلاشهای دیگری در زمینه تجسم زمین سه بعدی با استفاده از هولولنز، با برخی تغییرات در نرمافزار مورد استفاده است [ 21 ، 33 ]. خلاصه سطح بالایی از فرآیند در ارائه شده است شکل 1 ارائه شده استدر زیر، با جزئیات بیشتر در بخش های بعدی. فرآیند توسعه با تجربه ما در تعامل با برنامه ریزان محلی و مشاهده جلسات سیاست گذاری آنها هدایت می شد. هدف ما ایجاد تجسمهایی بود که دادههای فعلی و شیوهها و سیاستهای مدیریت ریسک سیل را که توسط شهر ونکوور توسعه داده شده است را منعکس کند (یعنی مفید باشد). تجسم ها بر اساس عملکرد سخت افزاری، قابلیت استفاده (با استفاده از Vi et al. [ 34 ] اکتشافی قابلیت استفاده) در بخش Results ارزیابی می شوند.
2.1. منطقه مطالعه
انتخاب منطقه مورد مطالعه برای این پروژه با توجه به تلاشهای سازگاری موجود در شهر ونکوور برای ساحل رودخانه فریزر انجام شد ( شکل 2 ). این منطقه در حال حاضر برای توسعه اقدامات سازگاری مناسب در حال ارزیابی است، و منابع متعددی برای ایجاد تجسمهای غنی از اثرات سیل در منطقه وجود دارد [ 35 , 36]. ساحل رودخانه فریزر که در جنوب شهر واقع شده است، عمدتاً از زمین های صنعتی استفاده می کند و برخی از زیرساخت های شهری حیاتی در این منطقه واقع شده است. با توجه به این واقعیت که بیشتر مناطق ساحلی در سطح آب فعلی آسیب پذیر هستند، سازگاری به موقع به یک نگرانی فزاینده تبدیل می شود. نقشهبرداری گسترده و سیاستهای انطباق پیشنهادی موجود برای این منطقه، آنها را برای توسعه تجسمهای غنی از نظر زمینه مرتبط میسازد.
2.2. داده های GIS به مدل های سه بعدی
برای توسعه تجسمها، از لایههای مختلفی استفاده شد، از جمله مدل رقومی ارتفاع (DEM) با وضوح 0.5 متر (بعدها برای بهبود عملکرد سیستم تجسم به وضوح 1 متر تبدیل شد)، ارتوفوتو، عمق سیل، ردپای ساختمان و عقبنشینی رودخانه. DEM، orthphoto، و ردپای ساختمان در پورتال داده باز شهر ونکوور موجود است، در حالی که عمق سیل و عقبنشینی رودخانه توسط برنامهریزان شهرداری در اختیار ما قرار گرفته است. سایر لایهها (به عنوان مثال، زیرساخت حفاظت) بر اساس پیشنهادات سازگاری موجود که توسط شهر توسعه داده شده است، دیجیتالی شدند. 36]. تمام لایه ها به UTM10N در QGIS پیش بینی شده و به میزان مناسب بریده شدند. برای ایجاد نمایش سه بعدی از عمق سیل، لایه عمق سیل با DEM پوشانده شد تا عمق سیل تنظیم شده توسط DEM به دست آید، که در آن ارتفاع آب به صورت عمق سیل + ارتفاع فعلی محاسبه می شود (یعنی ارتفاع سیل اکنون نسبت به ارتفاع مطلق است، نه ارتفاع مطلق. ارجاع به ارتفاع DEM). هنگامی که لایه ها آماده شدند و به میزان مناسبی برش داده شدند (که در زیر بحث می شود)، لایه های شطرنجی در قالب GeoTIFF و لایه های برداری به عنوان فایل های شکلی صادر شدند. این لایهها سپس به نرمافزار CityEngine وارد شدند، با عمق سیلاب تنظیمشده با DEM و DEM به عنوان لایههای زمین، و ساختمانها، دایکها و عقبنشینیها به عنوان لایههای برداری. DEM با ارتوفوتو با وضوح 0.2 متر بافت شد. و عمق سیل همانند نقشههای سیل موجود منتشر شده توسط شهر بود. برای استخراج هندسه سه بعدی از لایه های برداری، ارتفاع پایه به DEM تنظیم شد و اطلاعات ارتفاع ویژگی لایه های ساختمان برای اکسترود ساختمان ها استفاده شد. دایک های پیشنهادی حاوی اطلاعات خاصی در مورد ابعاد خود نیستند، بنابراین آنها به صورت خطوط با عرض 4 متر و ارتفاع 6 متر، به رنگ قرمز نمایش داده شدند. خطوط عقبنشینی بهعنوان اسپلاینهایی با عرض 2 متر و ارتفاع 10 متر، به رنگ سفید تجسم شدند. هندسه سهبعدی تولید شده در CityEngine در قالب Filmbox (.fbx) صادر شد، که میتواند در نرمافزار مدلسازی سهبعدی/موتور بازی، از جمله Unity، که برای یکپارچهسازی قابلیتهای واقعیت ترکیبی استفاده میشود، وارد شود. دایک های پیشنهادی حاوی اطلاعات خاصی در مورد ابعاد خود نیستند، بنابراین آنها به صورت خطوط با عرض 4 متر و ارتفاع 6 متر، به رنگ قرمز نمایش داده شدند. خطوط عقبنشینی بهعنوان اسپلاینهایی با عرض 2 متر و ارتفاع 10 متر، به رنگ سفید تجسم شدند. هندسه سهبعدی تولید شده در CityEngine در قالب Filmbox (.fbx) صادر شد، که میتواند در نرمافزار مدلسازی سهبعدی/موتور بازی، از جمله Unity، که برای یکپارچهسازی قابلیتهای واقعیت ترکیبی استفاده میشود، وارد شود. دایک های پیشنهادی حاوی اطلاعات خاصی در مورد ابعاد خود نیستند، بنابراین آنها به صورت خطوط با عرض 4 متر و ارتفاع 6 متر، به رنگ قرمز نمایش داده شدند. خطوط عقبنشینی بهعنوان اسپلاینهایی با عرض 2 متر و ارتفاع 10 متر، به رنگ سفید تجسم شدند. هندسه سهبعدی تولید شده در CityEngine در قالب Filmbox (.fbx) صادر شد، که میتواند در نرمافزار مدلسازی سهبعدی/موتور بازی، از جمله Unity، که برای یکپارچهسازی قابلیتهای واقعیت ترکیبی استفاده میشود، وارد شود.37 ].
2.3. ادغام با جعبه ابزار واقعیت ترکیبی
برای توسعه تجسم واقعیت ترکیبی بر اساس مدلهای سه بعدی ایجاد شده، ما از جعبه ابزار واقعیت ترکیبی (MRTK) استفاده کردیم، که پلتفرمی است که برای ادغام قابلیتهای واقعیت ترکیبی در برنامههای موجود ساخته شده است [ 38 ]. این توسط مایکروسافت توسعه یافته است و یک زیرساخت زیربنایی است که برای توسعه بیشتر برنامه های کاربردی برای پلت فرم هولولنز استفاده می شود. دستگاه هولولنز 2 یک سیستم کامپیوتری روی سر است که دارای نمایشگرهای استریوسکوپی، ردیابی موقعیت کاربر با 6 درجه آزادی، نقشه برداری فضایی و مدیریت انسداد محیط، ردیابی چشم، و ردیابی دست مفصلی است [ 39 ].]. با استفاده از زیرساخت MRTK، ما همچنین میتوانیم از سیستمهای مختصات همگامسازی شده در چندین دستگاه (از طریق Azure Anchors) و توسعه برنامههای کاربردی چند کاربره (از طریق Photon Unity Networking) استفاده کنیم [ ]. اسنادی که فرآیند توسعه را به طور کامل توصیف میکنند بهطور آشکار در وبسایت مایکروسافت در دسترس هستند. 40 ، 41
ما از MRTK نسخه 2.3، با استفاده از Unity 2019.2 و 2019.3 به ترتیب برای برنامه های مشترک و تک کاربر استفاده کردیم. از نسخههای مختلف Unity استفاده شد زیرا برخی از ویژگیها فقط در نسخه جدیدتر (مثلاً ردیابی چشم) در دسترس هستند و قابلیتهای مشارکتی فقط در نسخه قدیمیتر موجود است. ما همه تغییرات جزئی انجام شده در Unity را برای یکپارچه سازی MRTK ارائه نمی کنیم، زیرا تغییرات مداوم در جعبه ابزار و تغییر نسخه های نرم افزار باعث می شود راهنمای توسعه ما تا زمان انتشار قدیمی شود. در عوض، ما در مورد تصمیمات طراحی محتوای سطح بالاتر و رابط کاربری (UI) که در طول فرآیند توسعه گرفته شده است بحث می کنیم. به عنوان مثال، کل ساحل فریزر تقریباً 10 کیلومتر است و با توجه به وضوح DEM در 0.5 متر و عمق سیل در 1 متر، با توجه به محدودیتهای پردازشی دستگاه مورد استفاده، تجسم کل ساحل غیرممکن است. در طول آزمایش و توسعه، مشخص شد که یک منطقه بریده شده از ساحل در حدود 300 × 300 متر منجر به عملکرد صاف (پایدار در 55-60 فریم در ثانیه) شد. وسعت نهایی به 347 در 391 متر، در وضوح 1 متر برای مدل دشت سیلابی و ارتفاع دیجیتال رسید. مناطق بزرگتر عملکرد رندر دستگاه های ما را مختل می کند. این را می توان از طریق استفاده از رندر از راه دور، چه در فضای ابری و چه در یک ماشین محلی، برطرف کرد، اما در این مورد استفاده نشد زیرا قابلیت های دستگاه را در نسخه فعلی MRTK محدود می کند. به طور خاص، ردیابی دست مفصل و ردیابی چشم در آزمایشهای ما کار نکردند، و درک قابلیتها، استفاده از و کاستی های این جنبه های رابط مهم تر از تجسم مناطق بزرگتر با رندر خارج از دستگاه تلقی می شد. مدل منظر تجسم نهایی (شکل 3 الف) زمانی که کاربر برنامه را راه اندازی می کند تقریباً 1.5 متر عرض دارد.
2.4. توسعه رابط کاربری
اگرچه تحقیقات واقعیت مختلط برای چندین دهه در حال انجام است، فقط اخیراً سیستمهای MR قوی، با کارایی بالا و درجه مصرفکننده در دسترس قرار گرفتهاند (مانند HoloLens، Magic Leap). از این رو، دستورالعمل های کمی برای توسعه رابط های کاربری مناسب برای برنامه های MR وجود دارد. برخی از پیشنهادات برای طراحی رابط کاربری برای سیستم های MR در ادبیات ارائه شده است، و برخی دیگر توسط مایکروسافت در دستورالعمل های طراحی خود پیشنهاد شده است [ 34 ، 42 ، 43 ، 44 ، 45 . ] پیشنهاد شده است. رهنمودهای ارائه شده توسط وی و همکاران. [ 34] به خصوص مرتبط به نظر می رسید، زیرا آنها با آخرین نسل دستگاه های واقعیت افزوده روی سر (به عنوان مثال، هولولنز) نوشته شده بودند، در حالی که بسیاری از مطالعات قبلی مربوط به تجسم واقعیت افزوده دستی بودند (به عنوان مثال، [ 46 ]]). ما تاکید می کنیم که تصمیمات طراحی UI بر اساس ادبیات بالا و تجربه توسعه ما بود. توسعه رابطهای کاربری قابل استفاده و مفید MR برای دادههای مکانی به تحقیقات زیادی نیاز دارد تا بفهمیم چه جنبههایی از طراحی به سهولت استفاده کمک میکند و یک تجربه کاربری قانعکننده را ارائه میدهد. هدف ما توسعه یک رابط نامرئی/طبیعی بود تا به کاربران اجازه دهیم به جای اینکه حواسشان را با فناوری جدید پرت کنند، روی کار و محتوایی که در دست دارند متمرکز بمانند. برای این منظور، ما از قابلیت های ردیابی دست و چشم هولولنز و همچنین استفاده از نقشه فضایی محیط برای مدیریت انسداد و قرار دادن محتوا استفاده کردیم.
اهداف برای رابط کاربری چهارگانه بود: (1) ارائه قابلیتهای تعاملی برای تجسم سناریوهای سازگاری جایگزین ساحل که توسط شهر ونکوور در حال پرواز ایجاد شده است، (2) ارائه اطلاعات متنی مرتبط به کاربر بر اساس وضعیت مدل سه بعدی، (3) محتوای مجازی را در فضای فیزیکی کاربر ادغام میکند، و (4) از ویژگیهای موجود دستگاه (ردیابی دست و چشم) استفاده میکند، جایی که به نظر میرسد به تجربه کاربر ارزش میافزاید.
2.4.1. چیدمان محتوا
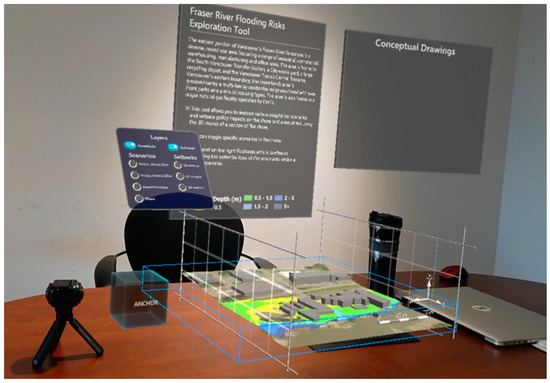
طرح رابط کاربری با تمایل به استفاده از فضای مجازی برای نمایش موثر اطلاعات متنی مرتبط با FRM هدایت می شد. ما یک طرح مفهومی موجود ایجاد شده توسط برنامه ریزان شهری را برای نشان دادن طرح بالقوه فضای فیزیکی تحت یک سناریوی سازگاری خاص یکپارچه کردیم. شرح مربوط به سناریوهای سازگاری بالقوه در پانل متنی بالای محتوای سه بعدی همراه با یک افسانه برای اطلاعات عمق سیل نمایش داده می شود ( شکل 3)). برای زمینه سازی ساحل تجسم شده، یک نوار مقیاس و یک فلش جهت را به بخش تجسم شده ساحل فریزر اضافه کردیم. عناصر محتوای دوبعدی (نقاشی، متن، افسانه) روی صفحات سه بعدی قرار می گیرند که یک مکعب سه بعدی نازک هستند. هنگامی که کاربر برنامه را راه اندازی می کند، محتوای سه بعدی در فاصله حدود 1.25 متری در مقابل کاربر ظاهر می شود و پانل متن و پنل طراحی های مفهومی در سطح چشم کاربر ظاهر می شود. این یک سازش بین تمایل به فعال کردن تعامل نزدیک و کاهش تضاد همگرایی و تطبیق، ناشی از نزدیکی محتوای مجازی به چشم کاربر بود. تجسم سه بعدی خطرات سیل ساحل فریزر کمی کمتر از سطح چشم کاربر است. مکان پیشفرض محتوا با ارگونومی نمایشگرهای روی سر مشخص میشود.42 ]. علاوه بر این، برای کاهش حرکت غیر ضروری، تمام محتوا در میدان دید HoloLens 2 قرار می گیرد.
2.4.2. اثر متقابل
ردیابی دستی در سراسر برنامه برای دستکاری محتوای سه بعدی (حرکت، چرخش، مقیاس بندی)، و همچنین تغییر وضعیت محتوا از طریق یک منوی مجازی استفاده می شود. قابلیتهای سیستمهای MR برای ردیابی دستها و تشخیص ژستها میتواند برای ادغام استعارههای تعاملی برای محتوای مجازی (مثلاً گرفتن یک شی) استفاده شود که دانش کاربر را در مورد تعامل با اشیاء واقعی افزایش میدهد. ردیابی دست مفصلی به کاربر این امکان را می دهد که اشیاء مجازی را در فاصله نزدیک با استفاده از دست خود (چنگ زدن برای گرفتن) و در فاصله با یک پرتو مجازی که از انگشت اشاره کاربر خارج می شود دستکاری کند. این به کاربر اجازه می دهد تا با یک دست برای جابجایی محتوا و با دو دست برای تغییر مقیاس و چرخش تعامل داشته باشد. این قابلیت های تعاملی به تمام اشیاء مجازی در صحنه اضافه شد. با توجه به ماهیت محتوا (متن،
برای تجسم سهبعدی، ما یک جعبه محدودکننده قاب سیمی اضافه کردیم که اطلاعاتی در مورد مجموع تجسم ارائه میدهد و استعارهای برای تعامل با تصویرسازی (جعبه مجازی) ارائه میدهد. برای تختههای سهبعدی که محتوای دوبعدی را در خود نگه میدارند، ما قابلیتی برای تراز کردن چرخش تختهها به دیوارههای فیزیکی اضافه کردیم، و از قابلیتهای نقشهبرداری فضایی و حلکنندهها (مغناطیس سطح) MRTK [ 47 ] استفاده کردیم.]. این قابلیت زمانی فعال می شود که کاربر شی (تخته سنگ) را بگیرد، با پرتو پرتویی از انگشت اشاره کاربر، دیوار را تشخیص داده و تخته سنگ را با آن تراز می کند. چرخش تخته سنگ در طول تعامل هر 0.6 ثانیه به روز می شود و نقشه فضایی محیط هر ثانیه به روز می شود. بهطور پیشفرض، این مقدار روی 0.1 ثانیه تنظیم شده است، اما تعامل در این نرخ بهروزرسانی بیرحمانه بود. قابلیتها و حلکنندههای نقشهبرداری فضایی امکان یکپارچهسازی انعطافپذیر محتوای مجازی را در محیطهای دنیای واقعی فراهم میکنند که در آن ابزارهای MR میتوانند استفاده شوند. برای افزایش توانایی برنامه برای انطباق سریع با محیط های جدید، سلسله مراتبی از اشیاء با تخته سنگ ها را که فرزندان تجسم سه بعدی اصلی ساحل هستند طراحی کردیم. این به کاربر اجازه میدهد تا مدل ساحل را جابهجا کند و بقیه رابط کاربری به دنبال آن است. با این حال،
ردیابی دست همچنین به کاربران این امکان را می دهد که دکمه های منوی مجازی را با استفاده از انگشت اشاره خود که دارای برخورد دهنده مجازی است فشار دهند. کنترل وضعیت سناریوهای نمایش داده شده از طریق یک منوی مجازی انجام می شود، جایی که کاربران می توانند با استفاده از انگشت اشاره خود در فاصله نزدیک و از طریق ژست “نیشگون کردن” در فاصله با دکمه ها تعامل کنند. در حالی که به نظر نمی رسید کاربر را قادر به مقیاس، چرخش و حرکت آزادانه محتوا کند، برای استفاده مضر نیست، اما برای مدل سه بعدی منظره، چرخش روی یک محور قفل می شود (یعنی جهت تجسم همیشه با کف تراز است). هر بار که کاربر روی دکمه ای کلیک می کند یا با محتوای تجسم ارتباط برقرار می کند، بازخورد صوتی در سراسر برنامه ارائه می شود.
ما قابلیتهای تعاملی ردیابی چشم را بررسی نکردیم، جدای از استفاده ظریف از تشخیص نگاه برای نشان دادن نکات تعاملی مناسب، زمانی که کاربر به یک شی قابل تعامل نگاه میکند. یکی دیگر از کاربردهای ردیابی چشم، که به طور پیش فرض در MRTK ادغام شده است، یک اشاره گر برجسته است که به سطحی اضافه می شود که توسط چشم مفصل زده می شود (یعنی نه فقط پرتویی که از مرکز سر کاربر به بیرون اشاره می کند). برجسته کردن محتوا به عنوان مثال، هنگامی که کاربر به دکمه ای نگاه می کند، با یک درخشش جزئی برجسته می شود. هنگامی که کاربر به هر یک از صفحات برش (که در پاراگراف بعدی توضیح داده شده است) نگاه می کند، یک اشاره متنی ظاهر می شود که از کاربر می خواهد آن را جابجا کند.
2.4.3. استعلام داده ها
برای بررسی احتمالات پرس و جو توپولوژی با ابزارهای واقعیت ترکیبی، ما از قابلیت های MRTK برای برش محتوای سه بعدی با استفاده از یک صفحه دوبعدی استفاده کردیم. ما از یک صفحه برش 2 بعدی شفاف با طرح (دسته ها) استفاده کردیم و یک شبکه ساده با سلول های 50 متری روی سطح اعمال کردیم تا هنگام نگاه کردن به مقطع هندسه سه بعدی، مرجع مقیاس ارائه شود. به طور پیش فرض، صفحه برش دوبعدی متعامد به جهت نمایش داده شده محتوای سه بعدی است و به کاربران اجازه می دهد تا مرزهای شرقی و غربی تجسم سه بعدی را مشخص کنند.
2.4.4. راهنمایی
در برنامه تک کاربره، ما همچنین راهنمایی هایی را در صورتی که برنامه توسط یک کاربر تازه کار استفاده می شود، یکپارچه کرده ایم. بهطور پیشفرض، پس از راهاندازی برنامه، پانل متن بخش تصویری ساحل فریزر را توصیف میکند، همچنین پانلهای دو بعدی و اصول تعامل را توصیف میکند. انیمیشنهای مجازی (بخشی از MRTK) که طرح کلی دست را نشان میدهند با پیامهای متنی ادغام شدهاند تا نحوه جابجایی صفحات برش، باز کردن منو و غیرفعال کردن راهنمایی را توضیح دهند. 3 انیمیشن به صورت متوالی با 5، 10، 15 ثانیه تاخیر از آخرین تشخیص دست کاربر نشان داده می شوند. اگر دست کاربر وجود نداشته باشد، انیمیشن ها به طور پیش فرض نشان داده می شوند.
2.5. توسعه تجسم مشارکتی
برای توسعه ابزارهای مشترک برای برنامه های کاربردی واقعیت ترکیبی، ما نیاز به حل سه جنبه داشتیم: همگام سازی محتوا، موقعیت محتوا در سیستم مختصات محلی، و مکان یابی سیستم های مختصات در بین دستگاه ها. برای همگام سازی موقعیت محلی محتوا در صحنه، ما از راه اندازی اولیه شبکه فوتون وحدت (شرح شده در مستندات MRTK) استفاده کردیم [ 41 ] ]. برای فعال کردن همگامسازی حالت/تعامل محتوا، از فراخوانی روش از راه دور استفاده کردیم که به ما امکان میداد وضعیت اسکریپتها/اشیاء را بین دو کاربر همگامسازی کنیم. برای مکان یابی اشیاء مجازی در یک محیط مشترک، از زیرساخت Azure Anchor [ 40 ] استفاده کردیم.]. تمام محتوای تجسم به یک مکعب مجازی متصل شده است که به عنوان لنگر استفاده می شود. هنگامی که کاربر مکعب را حرکت می دهد و با استفاده از یک دکمه یک لنگر ایجاد می کند و سپس آن را در شبکه به اشتراک می گذارد، کاربر دیگری می تواند این لنگر را بازیابی کند و بر اساس شباهت های نقشه های فضایی محیط اسکن شده توسط دو دستگاه هولولنز، آن را در فضا قرار دهد. . هم Photon Unity Networking و هم Azure Anchors به شبکه وای فای محلی برای به روز رسانی وضعیت محتوا در دو دستگاه متکی هستند. این زیرساخت در شکل 4 زیر نمایش داده شده است.
3. نتایج
بر اساس گردش کار ارائه شده در بالا، ما دو نمونه اولیه تجسم را برای تجسم تک کاربره و MR مشارکتی از سیل و سناریوهای سازگاری مرتبط ایجاد کردیم. در بخش های بعدی، تجربه کاربر، بازتاب عملکرد سخت افزار و قابلیت استفاده ارائه شده است. از طریق بازکردن نمونههای اولیه توسعهیافته از طریق چندین لنز، ما قابلیتهای پیشرفته MR را همانطور که در نمونههای اولیه خود درک کردهایم برجسته میکنیم.
3.1. برنامه های کاربردی توسعه یافته
همانطور که در بالا ذکر شد، ما یک نسخه تک کاربره را برای نشان دادن قابلیتهای دستگاههای MR فعلی توسعه دادیم، در حالی که یک نمونه اولیه مشترک را با تغییرات جزئی توسعه دادیم. دو نسخه ایجاد شد زیرا برخی از عملکردهای برنامه تک کاربره (با توجه به منابع توسعه ما) در یک نسخه مشترک قابل تحقق نبود. به طور خاص، مقیاسبندی محتوا غیرفعال شد و همچنین منوی محتوای دستی که به محیط منتقل شد، غیرفعال شد. این همچنین می تواند برای تجربه کاربر مفید در نظر گرفته شود، زیرا وضعیت منو در کنار مدل سه بعدی برای هر دو کاربر نمایش داده می شود. در زیر، تجربه کاربری و قابلیت های تجسم های توسعه یافته را مورد بحث قرار می دهیم.
هنگامی که کاربر برنامه را راه اندازی می کند، محتوای دیجیتال (تجسم سه بعدی، پانل متن، نقشه های مفهومی) در مقابل کاربر ارائه می شود. پانل متنی که تجسم را توصیف می کند، شرح مختصری از تجسم، تعامل، و افسانه لایه عمق دشت سیلابی را ارائه می دهد. در برنامه تک کاربره، هنگام شروع برنامه، راهنمای حرکتی به کاربر ارائه میشود که نحوه جابجایی محتوا (چنگ زدن و نگه داشتن)، نمایش منو (کف دست بالا) و خاموش کردن راهنمایی با یک سوئیچ روی پانل متنی (نفک کردن / ضربه زدن به هوا). تجسم سه بعدی خود را می توان آزادانه در فضا جابجا کرد و مقیاس کرد و در یک مکان خاص در دنیای واقعی باقی ماند. متن و پانل های طراحی مفهومی اطلاعات متنی مربوط به تجسم سیل ارائه شده را ارائه می دهند، و همچنین هنگامی که یک کاربر سناریوی انطباق خاصی را انتخاب می کند، اطلاعات مربوطه را ارائه می دهد. با انتخاب یکی از چهار سناریو انطباق، تغییرات مرتبط در محتوای سه بعدی ظاهر میشود (مثلاً نمایش یک سد ساحلی)، اطلاعات متنی برای توصیف مزایا و معایب یک رویکرد اقتباسی خاص تغییر میکند، و نقشههای مفهومی طرحهای هنری آینده را نشان میدهند. چیدمان ساحل این توانایی برای کاوش پویا مفاهیم فضایی و سیاستی یک رویکرد سازگاری خاص، نقش نقشهها و سایر ابزارهای تجسم سه بعدی طراحی شده برای درک و انتقال خطرات و سیاستهای کاهش مربوطه را نشان میدهد. اطلاعات متنی برای توصیف جوانب مثبت و منفی یک رویکرد اقتباسی خاص تغییر میکند، و نقشههای مفهومی طرحهای هنری طرحبندی ساحل آینده را نشان میدهند. این توانایی برای کاوش پویا مفاهیم فضایی و سیاستی یک رویکرد سازگاری خاص، نقش نقشهها و سایر ابزارهای تجسم سه بعدی طراحی شده برای درک و انتقال خطرات و سیاستهای کاهش مربوطه را نشان میدهد. اطلاعات متنی برای توصیف جوانب مثبت و منفی یک رویکرد اقتباسی خاص تغییر میکند، و نقشههای مفهومی طرحهای هنری طرحبندی ساحل آینده را نشان میدهند. این توانایی برای کاوش پویا مفاهیم فضایی و سیاستی یک رویکرد سازگاری خاص، نقش نقشهها و سایر ابزارهای تجسم سه بعدی طراحی شده برای درک و انتقال خطرات و سیاستهای کاهش مربوطه را نشان میدهد.1 ، 3 ، 26 ]. یکی دیگر از جنبه های FRM در شهر ونکوور، توسعه سیاست های عقب نشینی برای حفظ مناطق ساحلی برای زیرساخت های سازگاری بالقوه است. خطوط سهبعدی نشاندهنده عقبنشینیها از ساحل برای کاربر در منو در دسترس است و تضاد بین خطمشی پیشنهادی و ساختمانهای موجود قابل مشاهده است.
از آنجایی که محیط توسط دستگاه ها با استفاده از آرایه سنسور نگاشت می شود، مدیریت انسداد در یک محیط مشخص انجام می شود. این نقشه محیط همچنین برای تراز کردن صفحات مجازی با متن و نقاشی با دیوارهای دنیای واقعی استفاده می شود. در صورتی که تراز با دیوارها در یک محیط معین معنی نداشته باشد (یا فضا به خوبی ترسیم نشده باشد)، دستکاری دو دستی که تخته سنگ را می چرخاند می تواند آن را لغو کند. این انعطافپذیری مقیاسبندی محتوا، حرکت و تراز کردن، تجسم را در طیف وسیعی از محیطها، از یک میز کاربر تا تجسم در مقیاس اتاق، ادغام میکند.
دو صفحه برش متحرک که به صورت متعامد بر روی محتوا قرار گرفته اند، ابزاری ساده را برای تعریف گستره ها و جستجوی هندسه سه بعدی تجسم در امتداد محور صفحه برش (یعنی ترانسکت) به کاربر ارائه می دهند. “برش” حاصل از چشم انداز شبیه به مقطع ساحلی است که در پانل نقشه های مفهومی نمایش داده شده است. ما این قابلیت را برای ارائه یک راه حل ساده برای پرس و جو در مورد هندسه سه بعدی ساحل طراحی کردیم، در حالی که مطابقت بصری با “برش های” ساحل در نقشه های مفهومی ارائه می شود.
برنامه مشترک قابلیت های تجسم واقعیت ترکیبی را در یک محیط مشارکتی تعاملی همزمان و هم زمان فراهم می کند. از نظر تجربه واقعی کاربر، تنها تفاوت با یک برنامه کاربردی تک کاربر، نیاز به جابجایی لنگر (مکعب مجازی که محتوا به آن متصل شده است) به موقعیتی با هندسه دنیای واقعی به اندازه کافی پیچیده است (یعنی نه فقط در هوا. به عنوان مثال، در گوشه میز). با حرکت مکعب، کاربر می تواند از دکمه های مجازی برای شروع جلسه Azure، ایجاد لنگر و به اشتراک گذاری آن در شبکه استفاده کند. در این مرحله، مکعب لنگر در فضا قفل شده است و نمی توان آن را حرکت داد. سپس کاربر دوم یک جلسه Azure را در دستگاه خود شروع می کند و لنگر شبکه مشترک را دریافت می کند. در این مرحله، موقعیت مکعب لنگر برای هر دو کاربر یکسان است. و سیستمهای مختصات مجازی کاربران هممحل همگامسازی میشوند، به این معنی که محتوای مجازی در همان مکان واقعی ظاهر میشود. هنگامی که هر دو کاربر یک سیستم مختصات مشترک ایجاد کردند، موقعیت محتوای سه بعدی، چرخش، مقیاس (ثابت) و حالت سناریو همگی در زمان واقعی در بین کاربران همگام میشوند و به کاربران اجازه میدهند اطلاعات بصری را از منظر و موقعیت خود در یک مکان مشترک مشاهده و به اشتراک بگذارند. محیط واقعیت ترکیبی این توانایی برای تجربه و تعامل با دادهها در یک محیط مشارکتی میتواند به ایجاد مدلهای ذهنی مشترک از خطرات محیطی، گزینههای کاهش ریسک و سیاستهای فضایی بر اساس تجربه مشترک تجسمهای سهبعدی کمک کند. علاوه بر این، این راهاندازی برنامه MR بیشتر زمینههای غنی موجود را برای همکاران هممحل حفظ میکند:22 ]. این تنظیمات با دو کاربر آزمایش شده است، اما برای کاربران بیشتر مقیاس پذیر است.
3.2. عملکرد سخت افزار
در این بخش، عملکرد دستگاه در پردازش، استحکام نقشهبرداری فضایی و ردیابی دستی و چشمی را بررسی میکنیم.
پردازش در نسخه های تک کاربره و مشترک عملاً یکسان بود، با توجه به اینکه بیشتر قدرت پردازش صرف بارگذاری تجسم سه بعدی می شود. قابل توجه، در شکل 5نشان می دهد که برنامه تقریباً از 100٪ ظرفیت پردازنده گرافیکی تک هسته ای دستگاه استفاده می کند، با نرخ فریم نسبتاً پایدار در محدوده 50 تا 60 فریم در ثانیه. از آنجایی که ما سعی کردیم محتوا را برای استفاده از پردازش محلی تا حد امکان بهینه کنیم، این محدودیتهای دستگاههای پیشرفته فعلی را نشان میدهد. ما کمی بالاتر از حد توصیه شده 100 هزار چند ضلعی برای دستگاه هستیم، با مدل نهایی ~ 106 k چند ضلعی. توجه به این نکته مهم است که محدودیتهای دستگاه محلی نباید برنامهها را به محتوای سه بعدی ساده، وضوح کم یا ردپای هوایی کوچک محدود کند. با رندرینگ از راه دور در ماشینی در یک شبکه محلی (Remote Rendering) یا با رندر ابری (Azure Remote Rendering)، ابزارهای مبتنی بر هولولنز می توانند ده ها میلیون چند ضلعی را در خود جای دهند.
نمایشگرهای واقعیت ترکیبی در هولولنز 2 میدان دید نسبتاً محدودی دارند، که این محدودیت ذاتی برای تمام دستگاههای واقعیت ترکیبی/افزوده نصبشده روی سر است، به این معنی که بیشتر نمای محیطی تقویت نشده است، که بر غوطهور شدن تأثیر میگذارد و محدودیتهایی را ایجاد میکند. املاک مجازی” که بدون نیاز به حرکت سر کاربر قابل استفاده است. یکی دیگر از محدودیت های قابل توجه این دستگاه، محدودیت های روشنایی نمایشگرهای فعلی است: دستگاه عملاً در محیط های روشن (مثلاً با نور مستقیم خورشید روشن می شود) غیرقابل استفاده می شود.
نقشهبرداری فضایی برای اهداف ما در مدیریت انسداد، تداوم محتوای دیجیتال و تراز کردن صفحات مجازی با دیوارها رضایتبخش بود. نرخ بهروزرسانی پیشفرض مش فضایی محیط 3.5 ثانیه در MRTK است. ما نرخ به روز رسانی را به یک بار در ثانیه افزایش دادیم که منجر به عملکرد بهتر ویژگی های ذکر شده در بالا، بدون جریمه عملکرد ظاهری شد. هنوز جای پیشرفت وجود دارد، به خصوص در محیط هایی با هندسه/سایه های پیچیده. با این وجود، نگاشت فضایی محیط و پایداری محتوای دیجیتال در فضای واقعی در محیطی با نور خوب قوی است و با توجه به عدم وجود هر گونه حسگر خارجی یا استفاده از نشانگرهای واقعی، به ویژه چشمگیر است.
عملکرد ردیابی دستی در HoloLens 2 بدون ارجاع به تنظیمات ردیابی دیگر دشوار است. در تجربه ما، ردیابی در «سطح دستگاه» قابلیت استفاده نیست. پس از انطباق اولیه با ویژگیهای خاص ردیابی دست (مثلاً، دست باید در فاصله معینی قرار داشته باشد) و تعامل (یعنی حرکات و دکمهها باید خیلی بیشتر از چیزی که بر اساس بازخورد بصری انتظار دارید فشار داده شوند)، دقت ردیابی است. رضایت بخش/قابل استفاده است، اما هنوز جای قابل توجهی برای بهبود دارد.
علیرغم استفاده محدود از ردیابی چشم، ما باید به دقت تقریبا غیرعادی این قابلیت هولولنز اذعان کنیم. ردیابی عملاً بی عیب و نقص است، و این به ویژه برای رویکردهای بالقوه برای ارزیابی رابط های کاربر در واقعیت ترکیبی بر اساس داده های ردیابی چشم مفصل، فراتر از یک نگاه ساده از مرکز دوربین/سر کاربر، هیجان انگیز است.
عملکرد برنامه مشترک در همگام سازی سیستم های مختصات و حالت محتوا در دو دستگاه رضایت بخش بود، با تاخیر کمی (<100 میلی ثانیه). ایجاد لنگر برای به اشتراک گذاشتن سیستم مختصات نیازمند یک محیط واقعی اسکن شده به اندازه کافی پیچیده است. اگر لنگر روی یک سطح نسبتاً یکنواخت (میز خالی) یا در هوا قرار گیرد، همگام سازی مختصات حاصله نادرست است و می تواند تا 50+ سانتی متر خاموش شود. از آنجایی که همگام سازی محتوا و همگام سازی مختصات به خدمات شبکه وابسته است، اضافه بار وای فای محلی، سیگنال ضعیف و سرعت کم ممکن است بر تأخیر بین دو کاربر تأثیر بگذارد.
3.3. قابلیت استفاده
برای درک و بازگشایی قابلیت استفاده ابزارهای تجسم MR توسعه یافته، از چارچوب Vi و همکاران [ 34 ] از 11 چارچوب اکتشافی رابط کاربری MR استفاده کردیم. این مجموعه از دستورالعملهای طراحی با در نظر گرفتن قابلیتهای سیستمهای نصب شده روی سر ایجاد شده است و یک چارچوب مفید برای بحث در مورد تصمیمهای طراحی رابط کاربری اتخاذ شده ارائه میکند.
- 1.
-
سازماندهی محیط فضایی برای به حداکثر رساندن کارایی
توانایی رابطهای MR برای نقشهبرداری از محیط فیزیکی کاربر، ادغام محتوای مجازی و فضای فیزیکی را ممکن میسازد. با قرار دادن اشیاء مجازی بر روی سطوح واقعی (واقعی ترین شکل AR، طبق آزوما [ 16 )]، ما از ظرفیت انسان برای استدلال فضایی و احساس بدن خود در فضا، از طریق نشانههای حس عمقی قوی، برای تفسیر محتوای مجازی استفاده میکنیم. این امر با مسدود کردن محتوای مجازی توسط سطوح واقعی و همچنین تراز کردن پانل های اطلاعات با دیوارهای فیزیکی انجام می شود. این مجموعه از قابلیت ها باعث می شود که اپلیکیشن با محیط های اداری پیچیده سازگار شود. ما به طور فعال برنامههای MR را در فضاهای مختلف امتحان کردیم تا ببینیم که چگونه از نظر بصری، فضایی، و بهطور دقیق در (و با) فضاهای مختلف عمل میکنند. ما هر دو نسخه اشتراکی و تک کاربره را در فضاهای اداری، کنفرانس رسمی و غیررسمی آزمایش کردیم ( شکل 6). سنجش/نقشه برداری فضایی در حین پرواز از چابکی و انعطاف چشمگیر در سازگاری با محیط های مختلف پشتیبانی می کند. علاوه بر این، قوی بودن قابلیتهای آگاهی فضایی امکان جابهجایی محتوا از یک فضا (اتاق جلسه) به فضای دیگر (منطقه اداری باز) را بدون از دست دادن ردیابی یا همزمانی قرار دادن محتوا در یک نسخه مشترک فراهم میکند.
برای مثال، میتوانیم تجسم ساحل فریزر را روی یک میز و پانلهای اطلاعاتی را روی دیوار قرار دهیم (به عنوان مثال، شکل 6 ، پایین سمت چپ). با استفاده از محیط واقعی کاربر، مجموعهای از نشانههای بصری و حس عمقی را ارائه میکنیم که به درک مقیاس شی مجازی و موقعیتهای نسبی آنها کمک میکند [ 28 ]. از دیدگاه تجربه کاربر، ممکن است راحتتر باشد که بهطور خودکار محتوا را به سطوح شناساییشده «قلابدهی» کرد، که از طریق استفاده از درک معنایی محیط توسط دستگاه («درک صحنه») امکانپذیر است، اما به دلیل پیچیدگی فنی در اینجا محقق نشد.
- 2.
-
تعاملات و محیط های انعطاف پذیر ایجاد کنید
ما به دنبال استفاده از قابلیتهای ردیابی دستی هولولنز برای ارائه تعامل بصری/طبیعی با اشیاء مجازی، تقلید از اشیاء واقعی بودیم. فراتر از توانایی دستکاری محتوا به طور مستقیم با دست، کاربران می توانند از پرتوهای مجازی برای گرفتن اشیای دور استفاده کنند. توانایی جابجایی، مقیاس و چرخش محتوا به دلخواه کاربر، تجسم را با یک محیط معین سازگار می کند.
- 3.
-
اولویت دادن به راحتی کاربر و 5. طراحی حول قابلیت ها و محدودیت های سخت افزاری
قرار دادن محتوا با میل به ایجاد تعامل و مشاهده راحت برای کاربر، بدون دخالت در فضای شخصی یا نیاز به حرکات اضافی، هدایت می شد که از طریق توانایی تعامل با محتوا از راه دور محقق می شود. علاوه بر این، قرار دادن محتوا در فاصله تقریباً 1.25 متری در مقابل کاربر به طور پیشفرض به کاربر نیاز دارد که دستان خود را در دید دوربینهای دستگاه برای ردیابی دست حرکت دهد. برای تطبیق با میدان دید محدود نمایشگرهای MR در هولولنز، محتوا به صورت فشرده قرار داده شد تا نیاز کاربر به حرکت گردن در حین استفاده به حداقل برسد. محدودیتهای پردازش دستگاه با بهینهسازی گسترههای فضایی تجسم ساحل فریزر برطرف شد.
- 4.
-
ساده نگه دارید: کاربر را تحت فشار قرار ندهید
برای متمرکز نگه داشتن کاربر بر روی تأثیرات سیل، سازگاری و پیامدهای خط مشی مرتبط، طراحی UI حداقل است و فقط شامل ویژگی هایی است که مستقیماً با محتوای نمایش داده شده مرتبط است. همچنین مطابقت واضحی در نتایج تعامل وجود دارد، جایی که انتخاب سناریو توسط کاربر منعکس کننده تغییر همزمان در طراحی مفهومی مرتبط، متن و محتوای سه بعدی است.
- 5.
-
از نشانه ها برای کمک به کاربران در طول تجربه خود استفاده کنید و 8. بر اساس دانش دنیای واقعی بسازید
هنگامی که کاربر برنامه را راه اندازی می کند، اولین چیزی که در میدان دید ظاهر می شود، پانل متنی است که محتویات تجسم و تعامل را توصیف می کند. در نسخه تک کاربره، انیمیشنهای راهنمای حرکتی برای باز کردن منوی محتوا، جابجایی محتوا و کلیک کردن از راه دور (ضربه هوا) برای غیرفعال کردن هدایت به کاربران ارائه میشود. استفاده ظریف از ردیابی چشم برای نشان دادن اعلان های متنی و هایلایت ها در موقعیت نگاه کاربر نیز به دنبال هدایت کاربر از طریق تعامل است.
- 6.
-
یک تجربه XR قانع کننده ایجاد کنید
این مجموعه از نمونههای اولیه تجسم MR به دنبال استفاده از اطلاعات موجود مرتبط با تجسم سیل برای ارائه درک کاملی از پدیدههای سیل است. ما از بیشتر اطلاعات مربوط به انطباق ساحلی منطقه موجود در تصویرسازی استفاده کردیم و از ظرفیتهای رابط MR (همانطور که در سرتاسر بحث شد) برای ارائه ابزاری جذاب و ساده برای تعامل با دادههای مکانی استفاده کردیم. در حالی که نمونههای اولیه ما مطمئناً برای تجربه و استفاده قانع کننده هستند، ما پیشبینی میکنیم که کاربران دادههای مکانی انتظار داشته باشند بتوانند از مجموعه دادههای جغرافیایی بسیار بزرگتری بر اساس تجربه GIS خود استفاده کنند. این را می توان با رندر خارج از دستگاه انجام داد. جنبه های دیگری از رابط MR وجود دارد که به ویژه می تواند پتانسیل محیط های تعاملی MR را برای کاوش داده ها برجسته کند، به ویژه،
- 7.
-
بازخورد و سازگاری ارائه دهید
هنگامی که کاربران با محتوا تعامل دارند، بازخورد بصری، صوتی و حس عمقی را بر اساس تعامل خود دریافت می کنند. به عنوان مثال، هنگامی که یک کاربر سناریوی خاصی را در منو انتخاب می کند، دکمه شعاعی مربوطه تغییر رنگ می دهد، صدای کلیک پخش می شود و محتوا تغییر می کند. ما به دنبال ارائه بازخوردی به کاربران در مورد اینکه دستگاه چگونه حرکات دست/دست آنها را میبیند، ارائه کردیم، بنابراین تجسم مش دست مشاهدهشده توسط دستگاه را روشن نگه داشتیم، به طوری که کاربر آنچه را که دستگاه میبیند ببیند ( شکل 7 ). تعامل بین محتوای مختلف سازگار است، با تعامل تک دستی محتوا را حرکت می دهد، و دستکاری دو دستی برای مقیاس بندی و چرخش (و حرکت) اشیاء مجازی استفاده می شود.
- 8.
-
به کاربران این امکان را بدهید که احساس کنند کنترل تجربه را در دست دارند
هنگامی که کاربر برنامه را راه اندازی می کند، محتوای نمایش داده شده بی اثر است (به غیر از راهنمای دستی، که متحرک است، اما در فضا ثابت است). این بدان معنی است که محتوا فقط به دلیل تعامل صریح کاربر تغییر حالت می دهد یا حرکت می کند. در حالی که در تئوری خوب بود، در عمل، برخی از حرکات کلی دست به عنوان حرکات توسط دستگاه تشخیص داده شد که منجر به حرکت غیرمنتظره محتوا شد. این یک ویژگی دائمی ردیابی دست نیست، بلکه یک محدودیت “تصادفی” قابل توجه هنگام استفاده از برنامه برای مدت طولانی است.
- 9.
-
اجازه آزمون و خطا را بدهید
تنها خطای مهمی که به شدت بر تجربه تأثیر گذاشت و نیاز به راه اندازی مجدد برنامه داشت، حرکت تصادفی محتوا در پشت یک شیء/سطح/دیوار فیزیکی بود. با توجه به ماهیت رابطهای MR و مدیریت انسداد، گاهی اوقات محتوا میتواند عملاً در فضای فیزیکی، مانند پشت دیوار، «از بین برود» (یعنی کاربران نمیتوانند آن را ببینند یا با آن تعامل داشته باشند). این حرکت محتوا در پشت دیوارها احتمالاً از طریق افزودن برخورددهنده ها به دیوارها و اشیاء مجازی قابل تعمیر است، اما منجر به رفتار غیرمنتظره می شود (محتوای مجازی به بیرون پریده و در اطراف اتاق پرواز می کند). ما میخواستیم توانایی راهاندازی مجدد تجسم در موقعیت پیشفرض را پیادهسازی کنیم، اما راهاندازی مجدد صحنه با اجزای MRTK در Unity ساده نیست (نگاه کنید به [ 48 ] مراجعه کنید.]) و به دلیل محدودیت زمانی عملی اجرا نشد.
4. بحث
این بخش بازتاب انتقادی و بررسی این سیستم ها را از منظر عملکرد و پتانسیل آنها به عنوان ابزارهای عملیاتی و پتانسیل آنها برای ادغام با FRM فعلی و آینده و رویه برنامه ریزی ارائه می دهد. و در نهایت، نظریه پردازی اهمیت آنها به عنوان رابط های داده.
دستگاههایی که میتوانند تصاویر سه بعدی قابل استفاده را با رابطهای کاربر طبیعی ارائه دهند که به اندازه کافی قوی برای پشتیبانی از کارهای روزمره علم اطلاعات هستند، اخیراً ظاهر شدهاند و در حالی که فضای زیادی برای بهبود وجود دارد، تجربیات متمایز و متقاعدکنندهای از تعامل با دادههای سه بعدی ارائه میکنند [ 25 ]]. رشد چارچوبها و جوامع توسعه اختصاصی پیچیدگی توسعه تجربیات MR را به طور قابل توجهی کاهش میدهد. در حالی که سیستم های معاصر محدودیت های خود را دارند، ما در مقطع حساسی هستیم که در آن سیستم های MR به اندازه کافی قابل استفاده می شوند تا بر مشکلات کاربردی تمرکز کنند. با کاهش موانع و ادغام ساده دادههای مکانی در واسطهای MR، این ابزارها میتوانند به ابزاری معنادار برای بررسی توپولوژیهای تاثیرات، کاوش مجموعه دادهها در مقیاسها و درک تعامل بین سناریوی غرقاب و سیاستهای سازگاری پیشنهادی تبدیل شوند.
با قابلیتهای HoloLens 2، میتوانیم تجسمهای مشارکتی انعطافپذیری را توسعه دهیم که میتواند در دفاتر واقعی بدون نیاز به فضاهای اختصاصی (در صورت نیاز برای VR) یا دانش تخصصی برای تعامل استفاده شود. این کار گردش کار عملی را نشان می دهد و به دنبال برجسته کردن زیرساخت های قابل توجه موجود برای ساخت ابزارهای قدرتمند MR بدون تجربه توسعه قابل توجه است. نمونههای اولیه توسعهیافته فقط یک مورد خاص از ex situ را نشان میدهند، و در مورد نسخه مشترک، MR همزمان با هم قرار دارند. بسیاری از محققان همچنین در حال بررسی تجسم درجا اثرات سیل با استفاده از MR/AR هستند [ 11 ، 15 ]]. این طیف از کاربردها پتانسیل قابل توجهی را که این ابزارها می توانند برای تجزیه و تحلیل و پاسخ به خطرات سیل داشته باشند و همچنین محیط های قانع کننده ای برای ارائه اطلاعات در محل به مجموعه گسترده تری از سهامداران (مانند تصمیم گیرندگان، مشاغل، ساکنان و غیره) ارائه می دهد. ). در همان زمان، ما پتانسیل عظیمی را در نحوه تجسم MR میبینیم که میتواند تجسمهای سناریوی سیل را که در محل انجام میشوند برای درک تأثیرات و انطباق بر اساس دادههای موجود تغییر دهد. اگرچه این کار بر روی همکاری در محیط فیزیکی مشترک تمرکز دارد، با توجه به پتانسیل همکاران از راه دور برای توسعه مدلهای ذهنی قوی و مشترک ریسکها، احتمالات همکاری از راه دور با استفاده از رابطهای نوظهور میتواند تغییر کیفی در نحوه درک و مدیریت ریسکها داشته باشد.
فرآیند توسعه تجسم که در اینجا شرح داده شده است توسط مجموعه داده های موجود برای مدیریت خطر سیل در زمینه محلی هدایت می شود. در ابزارهای توسعهیافته (و مجموعه دادههای زیربنایی)، بعد سوم فقط برای نمایش اطلاعات ارتفاع در یک مکان (ارتفاع زمین، عمق سیل، ارتفاع ساختمان)، بدون پیچیدگی عمودی زیادی در دادهها استفاده میشود. با این حال، برای درک پتانسیل نمایشگرهای سه بعدی و رابط های کاربر طبیعی، ما به ادغام داده ها با خصوصیات سه بعدی پیچیده تر از فضا نیاز داریم. با افزایش استفاده از داده های واقعاً سه بعدی، مانند LiDAR، مدل های سه بعدی مشتق شده از ساختار از حرکت، و BIM برای توصیف مناظر و سازه های شهری، ارزش افزوده تجسم های MR و تعامل بر روی یک رابط WIMP قابل توجه تر خواهد بود. این می تواند منجر به یک تجربه تحلیلی غنی تر شود،7 ، 8 ]). اگرچه این کار بر روی همکاری در محیط فیزیکی مشترک تمرکز دارد، امکان همکاری از راه دور با استفاده از رابط های نوظهور می تواند تأثیر قابل توجهی بر نحوه درک و مدیریت خطرات داشته باشد و به طور بالقوه همکاران از راه دور را قادر می سازد تا مدل های ذهنی قوی و مشترکی از خطرات و سازگاری احتمالی ایجاد کنند. بر اساس تجسم های سه بعدی تعاملی
برای ادغام معنادار ابزارها در برنامه ریزی به طور کلی، و مدیریت ریسک سیل به طور خاص، ما به کار تجربی بسیار بیشتری نیاز داریم تا درک کنیم که چه جنبه هایی از رابط های واقعیت ترکیبی ارزشی را برای کاربر فراهم می کند. لحظه کنونی فرصتهای تحقیقاتی متعددی را برای بررسی این ابزارها برای عملی کردن دادههای مکانی ارائه میکند، زیرا آنها به طور گسترده در دسترس هستند و در صنایع متعدد مورد استفاده قرار میگیرند. با این حال، چگونگی بررسی ابزارهای توسعه یافته برای وظایف و اهداف پیچیده، مانند کاوش و حمایت از بحث سیاست، روشن نیست. معیارهای کاربردی ساده و زمانهای تکمیل کار که معمولاً برای مقایسه رابطها استفاده میشوند، نتایج ادراکی و پتانسیل ابزارهای MR را برای درگیر کردن مجموعه گستردهتری از کاربران در کاوش دادههای مکانی (یعنی بدون پیچیدگیهای یک GIS رومیزی) نشان نمیدهند.
5. نتیجه گیری ها
این تحقیق با هدف ادغام مجموعه دادههای موجود مرتبط با سازگاری ساحل با خطرات سیل در سیستم رابط واقعیت ترکیبی پیشرفته انجام شد. ما گردش کار مورد استفاده برای ادغام دادههای مکانی دقیق را در رابطهای MR تک کاربر و مشترک ارائه کردیم. نمونههای اولیه توسعهیافته قابلیتهای رابطهای MR معاصر را برای ارائه تجسم سه بعدی، تعامل مبتنی بر دست، و ادغام با محیط اطراف در حالی که پایدار و قابل استفاده در تنظیمات دنیای واقعی هستند، نشان میدهند. این پلتفرمها ابزارهای قانعکنندهای را برای کاوش دادههای مکانی ارائه میکنند و به دلیل انعطافپذیری و مزایای بالقوه ناشی از تجربیات ادراکی متمایز دادهها در MR، پتانسیل مشخصی برای ادغام در عمل واقعی دارند. کار ما با تمایل به ایجاد تجسم هایی هدایت شد که عملکرد واقعی مدیریت خطر سیل را منعکس می کند، در حالی که بر طراحی یک رابط کاربری ساده و مؤثر تمرکز می کنیم، در حالی که به محدودیت های دستگاه توجه می کنیم. پیشرفتهای اخیر در فنآوریهای رابط، فرصتهای حیاتی هیجانانگیزی را برای محققان و متخصصان ارائه میدهد تا دادههای خود را در محیطهای MR آزمایش و کاوش کنند. از طریق این کار، ما به دنبال نشان دادن پتانسیل رابطهای پیشرفته برای واسطهگری تعامل با دادههای مکانی در یک زمینه کاربردی مدیریت ریسک سیل بودیم. امیدواریم گردشهای کاری فنی گزارششده و دیدگاههای مفهومی ارائهشده، برای حمایت از کار سایر همکاران در این زمینه نوظهور مفید باشد.
منابع
- ژاکینود، اف. Bonaccorsi، J. مطالعه کاربردهای اجتماعی ژئوتصویرسازی های سه بعدی: درس های آموخته شده از پروژه های اقدام-پژوهشی در زمینه برنامه ریزی کاهش سیل. ISPRS Int. J. Geo-Inf. 2019 ، 8 ، 84. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- وینوف، آ. کولاگانی، ن. مک کال، MK; گلین، PD; کرگت، من؛ Ostermann، FO; پیرس، SA; رامو، پی. مدلسازی با ذینفعان – نسل بعدی. محیط زیست مدل. نرم افزار 2016 ، 77 ، 196-220. [ Google Scholar ] [ CrossRef ]
- هنسترا، دی. میناو، آ. Thistlethwaite, J. ارتباط با خطر فاجعه؟ ارزیابی در دسترس بودن و کیفیت نقشه های سیل. نات. سیستم خطرات زمین. علمی 2019 ، 19 ، 313-323. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- ماکیونه، اف. کوستابیل، پ. کوستانزو، سی. د سانتیس، آر. حرکت به نقشه های سه بعدی خطر سیل برای افزایش ارتباطات ریسک. محیط زیست مدل. نرم افزار 2019 ، 111 ، 510–522. [ Google Scholar ] [ CrossRef ]
- فنچ، آ. چن، آ. کلارک، ای. هدلی، ن. ساخت ابزار سازگاری برای تجسم تأثیرات ساحلی تغییرات آب و هوایی در جزیره پرنس ادوارد، کانادا. در سازگاری با تغییرات آب و هوایی در آمریکای شمالی ; Springer: برلین/هایدلبرگ، آلمان، 2017; ص 225-238. [ Google Scholar ]
- لای، J.-S. چانگ، W.-Y. چان، Y.-C. کانگ، اس.-سی. تان، Y.-C. توسعه یک محیط مجازی سه بعدی برای بهبود مشارکت عمومی: مطالعه موردی – پروژه کارهای انحراف سیل یوانسانتزه. Adv. مهندس به اطلاع رساندن. 2011 ، 25 ، 208-223. [ Google Scholar ] [ CrossRef ]
- د سانتیس، آر. ماکیونه، اف. کوستابیل، پ. Costanzo، C. ارتباط خطر بصری سیل شهری در محیط های سه بعدی بر اساس اسکن لیزری زمینی. در مجموعه مقالات روندهای جدید در مدلسازی زهکشی شهری. UDM 2018. انرژی سبز و فناوری ; Mannina، G.، Ed. انتشارات بین المللی Springer: چم، سوئیس، 2019; صص 783-787. [ Google Scholar ]
- امیرابراهیمی، س. رجبی فرد، ع. مندیس، پ. Ngo, T. یک روش یکپارچه سازی BIM-GIS در پشتیبانی از ارزیابی و تجسم سه بعدی آسیب سیل به یک ساختمان. جی. اسپات. علمی 2016 ، 61 ، 317-350. [ Google Scholar ] [ CrossRef ]
- میراودا، دی. Erra، UGO; آگاتیلو، آر. Cerverizzo، M. واقعیت افزوده موبایل برای مدیریت رویدادهای سیل. گل میخ آب. 2018 ، 13 ، 418-424. [ Google Scholar ] [ CrossRef ]
- وورستورن، اس. کوئیلو، ق. Staub, G. برنامه های کاربردی برای واقعیت ترکیبی. در مجموعه مقالات بیستمین کنگره ISPRS، استانبول، ترکیه، 12 تا 23 ژوئیه 2004. ص 12-23. [ Google Scholar ]
- هاینز، پی. Hehl-Lange، S. Lange، E. واقعیت افزوده موبایل برای تجسم سیل. محیط زیست مدل. نرم افزار 2018 ، 109 ، 380-389. [ Google Scholar ] [ CrossRef ]
- لونرگان، سی. هدلی، ن. واقعیت ترکیبی انعطافپذیر و شبیهسازی موقعیتیافته بهعنوان اشکال نوظهور ژئوتصویرسازی. کارتوگر. بین المللی جی. جئوگر. Inf. Geovisualization 2014 ، 49 ، 175-187. [ Google Scholar ] [ CrossRef ]
- ژانگ، جی. گونگ، جی. لی، ی. سان، ج. خو، بی. ژانگ، دی. ژو، جی. گوا، ال. شن، اس. یین، بی. یک رویکرد تجسم پویا سیل کارآمد مبتنی بر چاپ سه بعدی و واقعیت افزوده. بین المللی جی دیجیت. زمین 2020 ، 13 ، 1302-1320. [ Google Scholar ] [ CrossRef ]
- نیول، آر. کانسا، آر. شارما، تی. تجسم گزینههای ما برای مکانهای ساحلی: کاوش در تجسمهای جغرافیایی غوطهورانه واقعی بهعنوان ابزاری برای رویکردهای فراگیر به برنامهریزی و مدیریت ساحلی. جلو. مارس Sci. 2017 ، 4 ، 290. [ Google Scholar ] [ CrossRef ]
- لونرگان، سی. هدلی، ن. پیمایش آینده ارتباطات خطر سونامی: استفاده از ابعاد، تعامل و موقعیت برای ارتباط با جامعه. نات. خطرات 2015 ، 78 ، 179-201. [ Google Scholar ] [ CrossRef ]
- Azuma، RT بررسی واقعیت افزوده. Presence Teleoperators Virtual Environ. 1997 ، 6 ، 355-385. [ Google Scholar ] [ CrossRef ]
- وودز، TL; رید، اس. Hsi، S. Woods, JA; Woods، MR Pilot مطالعه با استفاده از جعبه شنی واقعیت افزوده برای آموزش نقشههای توپوگرافی و فرآیندهای سطحی در آزمایشگاههای زمینشناسی مقدماتی. جی. ژئوشی. آموزش. 2016 ، 64 ، 199-214. [ Google Scholar ] [ CrossRef ]
- رید، SE; کریلوس، او. Hsi، S. Kellogg، LH; شلادو، جی. ییکیلماز، MB; سگال، اچ. سیلورمن، جی. یالوویتز، اس. نمایشگاه Sato, E. Shaping watersheds: یک جعبه شنی واقعیت افزوده تعاملی برای پیشرفت آموزش علوم زمین. در مجموعه مقالات چکیده نشست پاییز AGU، سانفرانسیسکو، کالیفرنیا، ایالات متحده آمریکا، 15-19 دسامبر 2014. جلد 2014، ص. ED34A-01. [ Google Scholar ]
- میلگرام، پی. کیشینو، اف. طبقهبندی نمایشهای بصری واقعیت ترکیبی. IEICE Trans. Inf. سیستم 1994 ، 77 ، 1321-1329. [ Google Scholar ]
- کیم، اس. لی، جی. هوانگ، دبلیو. کیم، اچ. وو، دبلیو. Billinghurst، M. ارزیابی ترکیب نشانههای ارتباط بصری برای همکاری از راه دور مبتنی بر واقعیت ترکیبی HMD. Conf. هوم محاسبه عوامل سیستم Proc. 2019 ، 1-13. [ Google Scholar ] [ CrossRef ]
- وانگ، دبلیو. وو، ایکس. چن، جی. Chen, Z. Holo3DGIS: استفاده از هولولنز مایکروسافت در اطلاعات جغرافیایی سه بعدی. ISPRS Int. J. Geo-Inf. 2018 ، 7 ، 60. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- انس، بی. لنیر، جی. تانگ، ا. بیتمن، اس. لی، جی. پیومسومبون، تی. Billinghurst، M. بازبینی همکاری از طریق واقعیت ترکیبی: تکامل گروه افزار. بین المللی جی. هوم. محاسبه کنید. گل میخ. 2019 ، 131 ، 81-98. [ Google Scholar ] [ CrossRef ]
- هدلی، ن. پستنر، ال. بیلینگ هرست، ام. می، R. AR مشترک برای تجسم جغرافیایی. در مجموعه مقالات دومین سمپوزیوم بین المللی واقعیت مختلط، یوکوهاما، ژاپن، 14 تا 15 مارس 2001. ص 11-18. [ Google Scholar ]
- هدلی، ن. بیلینگ هرست، ام. پستنر، ال. می، آر. کاتو، اچ. کاوش در استفاده از واقعیت افزوده برای تجسم جغرافیایی. Presence Teleoperators Virtual Environ. 2002 ، 11 ، 119-133. [ Google Scholar ] [ CrossRef ]
- بیلینگ هرست، ام. کلارک، ای. لی، جی. بررسی واقعیت افزوده. پیدا شد. Trends Hum.-Comput. تعامل داشتن. 2015 ، 8 ، 73-272. [ Google Scholar ] [ CrossRef ]
- لیسک، دی جی؛ وید، تی. رونس، لس آنجلس آگاهی و استراتژیهای تغییر آب و هوا برای ارتباط با خطر سیلهای ساحلی: نمونه موردی دریایی کانادا. استوار. ساحل. Shelf Sci. 2014 ، 140 ، 83-94. [ Google Scholar ] [ CrossRef ]
- شلتون، BE; هدلی، ن. استفاده از واقعیت افزوده برای آموزش روابط زمین و خورشید به دانشجویان رشته جغرافیا. در مجموعه مقالات اولین کارگاه بین المللی IEEE Augmented Reality Toolkit ; IEEE: دارمشتات، آلمان، 2002; پ. 8. [ Google Scholar ]
- شلتون، BE; هدلی، ن. بررسی یک مبنای شناختی برای یادگیری روابط فضایی با واقعیت افزوده. تکنولوژی Instr. شناخت. فرا گرفتن. 2004 ، 1 ، 323. [ Google Scholar ]
- نیلسون، اس. یوهانسون، BJE; Jönsson، A. یک برنامه کاربردی واقعیت افزوده مشارکتی. در مجموعه مقالات هشتمین کنفرانس بین المللی پیوستار واقعیت مجازی و کاربردهای آن در صنعت ; ACM: یوکوهاما، ژاپن، 2009; صص 179-184. [ Google Scholar ]
- بیلینگ هرست، ام. وگهورست، اس. Furness, T. کامپیوترهای پوشیدنی برای CSCW سه بعدی. در مجموعه مقالات خلاصه مقالات. اولین سمپوزیوم بین المللی کامپیوترهای پوشیدنی IEEE: کمبریج، MA، ایالات متحده آمریکا، 1997; صص 39-46. [ Google Scholar ]
- گرست، آر. بره، پ. Billinghurst، M. ارزیابی همکاری در فضای مختلط. در مجموعه مقالات چهارمین سمپوزیوم بین المللی IEEE و ACM در مورد واقعیت ترکیبی و افزوده (ISMAR’05) ؛ IEEE: وین، اتریش، 2005; ص 90-99. [ Google Scholar ]
- Microsoft What Is Mixed Reality Toolkit. در دسترس آنلاین: https://microsoft.github.io/MixedRealityToolkit-Unity/version/releases/2.3.0/README.html (در 10 ژوئن 2020 قابل دسترسی است).
- وانگ، دبلیو. وو، ایکس. او، ا. Chen, Z. مدلسازی و تجسم صحنه های جغرافیایی سه بعدی هولوگرافیک با داده های به موقع بر اساس هولولنز. ISPRS Int. J. Geo-Inf. 2019 ، 8 ، 539. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- وی، اس. دا سیلوا، تی اس; Maurer, F. راهنمای تجربه کاربر برای طراحی برنامه های کاربردی واقعیت توسعه یافته HMD. در مجموعه مقالات کنفرانس IFIP در مورد تعامل انسان و کامپیوتر ; اسپرینگر: پافوس، قبرس، 2019؛ صص 319-341. [ Google Scholar ]
- شهر ونکوور نقشه های رودخانه فریزر ; شهر ونکوور: ونکوور، BC، کانادا، 2014. [ Google Scholar ]
- شهر ونکوور طرح مناسب سازی ساحلی – رودخانه فریزر شرقی شرایط فعلی ; شهر ونکوور: ونکوور، BC، کانادا، 2018. [ Google Scholar ]
- Esri How to: Export Models Textured from CityEngine به Unity. در دسترس آنلاین: https://support.esri.com/en/technical-article/000012449 (دسترسی در 10 ژوئن 2020).
- شروع مایکروسافت با MRTK v2. در دسترس آنلاین: https://docs.microsoft.com/en-us/windows/mixed-reality/mrtk-getting-started (در 2 اکتبر 2020 قابل دسترسی است).
- Microsoft HoloLens 2. در دسترس آنلاین: https://www.microsoft.com/en-us/hololens/hardware (در 10 ژوئن 2020 قابل دسترسی است).
- Microsoft 1. شروع به کار با لنگرهای فضایی Azure. در دسترس آنلاین: https://docs.microsoft.com/en-us/windows/mixed-reality/mrlearning-asa-ch1 (در 10 ژوئن 2020 قابل دسترسی است).
- مایکروسافت 1. راه اندازی شبکه فوتون یونیتی. در دسترس آنلاین: https://docs.microsoft.com/en-us/windows/mixed-reality/mrlearning-sharing(photon)-ch1 (در 10 ژوئن 2020 قابل دسترسی است).
- Microsoft Comfort. در دسترس آنلاین: https://docs.microsoft.com/en-us/windows/mixed-reality/comfort (در 10 ژوئن 2020 قابل دسترسی است).
- دانسر، آ. Billinghurst، M. ارزیابی سیستم های واقعیت افزوده. در کتابچه راهنمای واقعیت افزوده ; Springer: برلین/هایدلبرگ، آلمان، 2011; صص 289-307. [ Google Scholar ]
- استیونز، ام آر. Hanschka، S. نقشه برداری خطر سیل شهری: مورد بریتیش کلمبیا، کانادا. نات. خطرات 2014 ، 73 ، 907-932. [ Google Scholar ] [ CrossRef ]
- دی، ع. بیلینگ هرست، ام. Lindeman، RW; Swan, J. مروری سیستماتیک از 10 سال مطالعات قابلیت استفاده واقعیت افزوده: 2005 تا 2014. جلو. ربات. 2018 ، 5 ، 37. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- سانتوس، MEC؛ پولوی، جی. تاکتومی، تی. یاماموتو، جی. سندور، سی. کاتو، اچ. پرسشنامه های استاندارد قابلیت استفاده برای واقعیت افزوده دستی. محاسبات IEEE. نمودار. Appl. 2015 ، 35 ، 66-75. [ Google Scholar ] [ CrossRef ]
- مغناطیس سطحی مایکروسافت در دسترس آنلاین: https://docs.microsoft.com/en-us/windows/mixed-reality/surface-magnetism (دسترسی در 10 ژوئن 2020).
- Provencher، E. MRTK از تخلیه و نابودی شماره 4530 پشتیبانی نمی کند. در دسترس آنلاین: https://github.com/microsoft/MixedRealityToolkit-Unity/issues/4530 (در 10 ژوئن 2020 قابل دسترسی است).
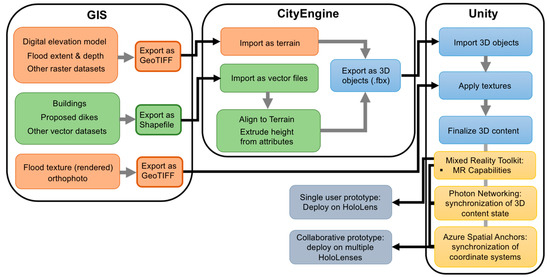
شکل 1. این فلوچارت یک نمای کلی از گردش کار توسعه از داده های GIS معمولی (جعبه های نارنجی نشان دهنده داده های شطرنجی، جعبه های سبز نشان دهنده داده های برداری) است که در قالب مناسب صادر شده و به هندسه سه بعدی (جعبه های آبی) در CityEngine، مدل سه بعدی ایجاد شده، تبدیل شده است. سپس می توان آن را به Unity وارد کرد و با اجزای مختلف جعبه ابزار واقعیت ترکیبی (جعبه های زرد) ادغام کرد تا برنامه های کاربری تک و اشتراکی مستقر در هولولنز 2 ایجاد کند.

شکل 2. اسناد منتشر شده توسط شهر ونکوور راهنمایی برای طراحی تجسم، و همچنین متن و نقشه های مفهومی مورد استفاده در رابط کاربری ارائه می دهد. در سمت چپ ، یک نقشه تاثیر سیل است، و سند سمت راست گزیده ای از طرح سازگاری ساحلی است که سناریوهای مختلف سازگاری را برای منطقه ساحلی فریزر توصیف می کند.
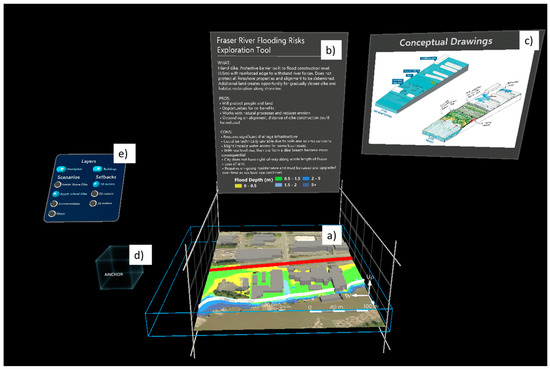
شکل 3. این اسکرین شات UI (رابط کاربری) توسعه یافته تجسم را در یک برنامه مشترک، با سناریوی تطبیق دایک داخلی انتخاب می کند: ( الف ) محتوای سه بعدی، با 2 صفحه برش، نوار مقیاس و فلش های جهت. ( ب ) پانل متنی ارائه دهنده vis. و شرح سناریو؛ ( ج ) نقشه های مفهومی مربوط به یک سناریو. ( د ) شی لنگر مورد استفاده برای همگام سازی موقعیت. ( ه ) منوی محتوا.
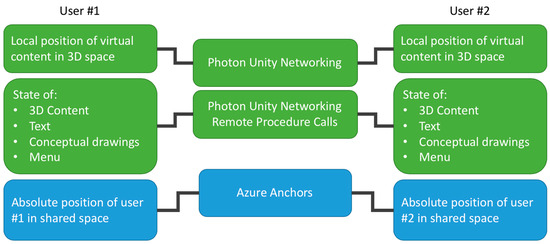
شکل 4. این نمودار نشان میدهد که چگونه مؤلفههای مختلف تجربه مشترک بین دو کاربر هماهنگ میشوند، با Photon Unity Networking و Remote Procedural که حالت محتوا را بین دو کاربر وصل میکند، و Azure Anchors سیستم مختصات مشترک را برای کاربران فراهم میکند.
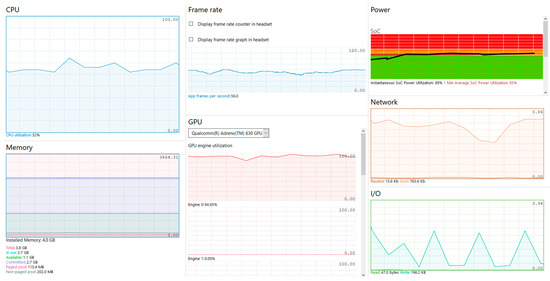
شکل 5. تصویری از استفاده از سخت افزار زنده از تصویرسازی مشترک MR (واقعیت ترکیبی). همانطور که می بینید، استفاده از CPU (واحد پردازش مرکزی) 50 تا 60 درصد است و بار GPU تقریباً 100 درصد در نوسان است و نرخ فریم بین 50 تا 60 فریم در ثانیه در نوسان است که برای عملکرد نرم افزار کافی است.
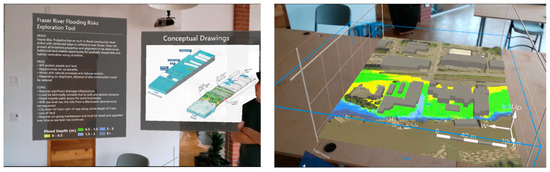
شکل 6. (بالا) نسخه مشترک نمونه اولیه MR در محیط اتاق کنفرانس. نمایش داده شده یک طرح بندی پیش فرض از محتوا در هنگام راه اندازی است که می تواند بیشتر با محیط سازگار شود. ( پایین ) تجسم MR تک کاربر با محیط فضای کاری مشترک سازگار شده است. تجسم سه بعدی ( راست ) روی یک میز قرار می گیرد و پانل های اطلاعاتی ( سمت چپ ) با دیوار مجاور تراز می شوند. همچنین می توانید متوجه انسداد پویا فردی شوید که در مقابل پانل نقشه های مفهومی ایستاده است.
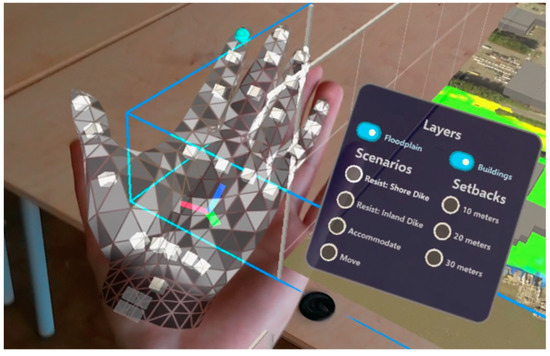
شکل 7. تصویری از یک برنامه کاربردی تک کاربر در حال استفاده، با منوی محتوا با بالا آوردن کف دست فعال شده است. شما می توانید تجسم مش دست را مشاهده کنید که بازخورد بصری را به کاربر ارائه می دهد. توجه: جابهجایی/تفاوت قابل توجه بین دست مجازی و واقعی فقط در فیلمها/عکسهای گرفته شده ظاهر میشود.


بدون دیدگاه