1. مقدمه
فناوری اطلاعات مکانی (SIT) به طور گسترده در جهت یابی وسایل نقلیه استفاده شده است. سیستم های حمل و نقل هوشمند (ITS) با موفقیت در مدیریت حمل و نقل به کار گرفته شده اند و الگوریتم تطبیق نقشه نقش مهمی در چنین سیستم هایی دارد [ 1 ، 2 ، 3 ، 4 ، 5 ]. کارایی و دقت تطبیق نقشه سالهاست که مورد بحث قرار گرفته است. کامیونهای بزرگ (یعنی آنهایی که بیش از پانزده تن دارند) با کانتینرهای باری، و بنابراین، دایرههای چرخشی بزرگ معمولاً در اعزام ناوگان استفاده میشوند. اگرچه مطالعات قبلی مطالعات شعاع چرخش را برای وسایل نقلیه عمومی ارائه کرده است [ 6 ، 7]، مسیرهای رانندگی کامیون های بزرگ با وسایل نقلیه معمولی متفاوت است. برای رویه تطبیق نقشه دشوار است که به طور موثر موقعیت هایی را مدیریت کند، مانند زمانی که راننده در جاده ای پیچیده و باریک دور برگردان می کند، یا هنگام برخورد با کامیون های بزرگ با استفاده از داده های موقعیت یابی در مقیاس بزرگ، که می تواند دقت محاسباتی را در تعیین آنها کاهش دهد. موقعیت ها به طور کلی، موقعیت یابی ناوگان بزرگ توسط سیستم های موقعیت یابی جهانی (GPS) نظارت می شود، که به سرعت در مکان یابی دقیق موقعیت کامیون های بزرگ در کاربردهای لجستیک اهمیت پیدا کرده اند. همه جادهها و بخشهای جادهای برای ناوگان کامیونهای بزرگ مناسب نیستند و از آنجایی که شبکههای جادهای واقعی بسیار پیچیده هستند، بسیار مهم است که بتوان اطلاعات مکان را در زمان واقعی نشان داد.
تطبیق نقشه شامل قرار دادن موقعیت ها از GPS بر روی نقشه دیجیتال است. بسیاری از مطالعات از رایانهها برای انجام چنین رویههای تطبیق نقشه استفاده میکنند که از محاسبات مختصات دریافت شده توسط اطلاعات ردیابی GPS از وسایل نقلیه مطابق با جاده روی نقشه استفاده میکنند. علاوه بر این، روش تطبیق نقشه شامل استفاده از اطلاعات شبکه جاده در یک نقشه دیجیتال به عنوان مبنای طبقه بندی برای تشخیص الگو برای تصحیح خطاهای موقعیت یابی GPS با توجه به نتایج شناسایی شده است [ 1 ، 2 ].]. به دست آوردن داده های دقیق مکان در مقیاس بزرگ با استفاده از فناوری موجود در حال حاضر اولین گام به سمت تعیین مناسب ترین مسیر رانندگی است. در زمینه خدمات مبتنی بر مکان (LBS)، این مقاله از SIT در ITS برای جمعآوری دادههای مقیاس بزرگ از حسگرهای مختلف به منظور رسیدگی به مشکلات مسیریابی کامیونهای بزرگ استفاده کرد.
سیستم های اطلاعات جغرافیایی (GIS) با استفاده از فناوری طرح ریزی برای تبدیل داده های سه بعدی به نقشه های دو بعدی توسعه یافته اند. از آنجایی که پیش بینی نقشه با استفاده از فضای سه بعدی انجام می شود، روش های تبدیل مختصات مورد استفاده توسط فناوری طرح ریزی می تواند زمان قابل توجهی را ببرد. برای محدود کردن این بازه زمانی، لازم است فرآیند تبدیل همه مختصات با استفاده از الگوریتم تطبیق نقشه تکمیل شود. داده های نقطه GPS با حداکثر اندازه، بسته به مقدار داده، به طور مداوم برای تمام عملیات پردازش دریافت می شوند [ 5 ، 8 ]]. خدمات لجستیک در حال حاضر به طور معمول استفاده می شود و مدیریت حمل و نقل هوشمند پدیدار شده است که از مدیریت ناوگان پیشرفته برای ارسال خودکار وسایل نقلیه به همراه GIS استفاده می کند که اطلاعات بلادرنگ را در مورد شبکه جاده واقعی ارائه می دهد. مدیریت هوشمند ناوگان و اعزام شامل یک سیستم اطلاعاتی به هم پیوسته است که برای تکمیل مؤثرتر وظایف لجستیکی استفاده می شود. با توسعه سریع فناوری اطلاعات و ارتباطات (ICT)، اینترنت وسایل نقلیه (IoV) به محبوب ترین ابزار حمل و نقل هوشمند برای جمع آوری اطلاعات از حسگرها و تجزیه و تحلیل داده های ارسال وسایل نقلیه برای ارائه خدمات کامل برای حمل و نقل هوشمند تبدیل شده است. با افزایش مداوم حملونقل جادهای در سطح جهان، مدیریت موثر ناوگان ضروری است.2 ، 3 ، 5 ] و SIT را با فناوری اطلاعات و ارتباطات برای ارسال خودرو ترکیب کنید. این سیستم باید بتواند موقعیت ناوگان را به طور مداوم نظارت کند و مرتباً موقعیت را مطابقت دهد تا اطمینان حاصل شود که وسایل نقلیه با ظرفیت بهینه کار می کنند. دیسپاچینگ ناوگان بزرگ برای کارایی و ارائه مناسب ترین خدمات مدیریت ناوگان تلاش می کند. با این حال، شبکه های جاده ای پیچیده منجر به خطاهای محاسبه مسافت می شوند، بنابراین موقعیت دقیق محاسبه شده ناوگان ممکن است همیشه دقیق نباشد. در نتیجه، مطالعات زیادی در مورد تصحیح خطای موقعیت با استفاده از الگوریتم های تطبیق نقشه انجام شده است.
وسایل نقلیه کاوشگر (یا وسایل نقلیه شناور) اکنون برای جمع آوری داده های شناور برای به دست آوردن اطلاعات جاده در زمان واقعی استفاده می شوند و همچنین می توانند به روش های مختلف موثر با داده های ITS مورد استفاده قرار گیرند. وسایل نقلیه کاوشگر در یک فرکانس ثابت با مرکز کنترل ارتباط برقرار می کنند و موقعیت خودروها را در جاده ردیابی می کنند. این دادههای مقیاس بزرگ بلافاصله برای دریافت، تبدیل انواع مختلف ساختارهای داده به اطلاعات ترافیکی مفید برای پردازش الگوریتم تطبیق نقشه استفاده میشوند [ 9 ، 10 ، 11 ]. ساختارهای داده شامل قالبهای مبتنی بر برداری و شطرنجی برای الگوریتم تطبیق نقشه است. داده های مکانی پردازش شده را می توان به هر دو فرمت داده تبدیل کرد، در حالی که داده های ساختارهای مختلف را می توان به یکدیگر تبدیل کرد [ 5 ]]. بنابراین، در این مقاله از مفهوم وسیله نقلیه کاوشگر در مدیریت ناوگان کامیون های بزرگ استفاده کردیم. اطلاعات ترافیکی از وضعیت ترافیک فعلی جمعآوری شد و زمان رانندگی نیز برای هر بخش از جاده برای تسهیل در اعزام فوری در نظر گرفته شد.
به طور کلی، بسیاری از انواع اطلاعات ترافیکی را می توان در شبکه های دیجیتال جاده ای نمایش داد. الگوریتمهای تطبیق نقشه بر اصلاح خطای موقعیت و بهبود کارایی تمرکز میکنند تا موقعیت فعلی وسایل نقلیه را نشان دهند. با این حال، اکثر مطالعات در مورد الگوریتم های تطبیق نقشه، دقت موقعیت را مورد بحث قرار می دهند. علاوه بر این، شبکه راه ها به طور فزاینده ای پیچیده تر می شود. برای کاربرد عملی حمل و نقل، برنامه ریزی شبکه راه بر عملکرد تطبیق نقشه تأثیر می گذارد که به نوبه خود بر مسیرهای اعزام ناوگان کامیون های بزرگ تأثیر می گذارد. در این مقاله، ما یک روش جدید برای توسعه یک برنامه تطبیق نقشه موثر ارائه میکنیم. با منابع محدود برای ارتقاء سخت افزار و نرم افزار برای بهبود الگوریتم تطبیق نقشه برای پیاده سازی موقعیت یابی نقشه، دو عامل کلیدی شامل زمان و پول (هزینه) در این مطالعه باید در نظر گرفته می شد. هدف افزایش کارایی اعزام ناوگان بزرگ، ارائه موقعیتیابی نقشه کارآمد بر اساس حجم دادههای بزرگ ناوگان و حل مشکلات کلان داده مربوطه برای بهبود کارایی محاسباتی بود.
بقیه این مقاله به شرح زیر سازماندهی شده است. بخش 2 بررسی مختصری از الگوریتم های تطبیق نقشه و ساختار داده های مکانی آنها را ارائه می دهد. در بخش 3 ، ما رویکرد تطبیق نقشه مبتنی بر چند لایه را توسعه میدهیم. بخش 4 نتایج مقایسه و تجزیه و تحلیل را با استفاده از الگوریتم تطبیق نقشه مبتنی بر چند لایه ارائه شده با دو نوع مختلف ساختار داده ارائه می کند. بخش 5 نتایج را منعکس می کند که بر اساس آن مهم ترین بحث و نتیجه گیری را ارائه می دهیم.
2. الگوریتم ها و ساختارهای داده های مکانی در سیستم های اطلاعات جغرافیایی (GIS)
GIS معمولاً برای مدیریت وسایل نقلیه استفاده می شود و ناوبری وسیله نقلیه برای وظایف لجستیکی برای سال ها مورد توجه تحقیقاتی بوده است [ 2 ، 3 ، 4 ، 5 ]. بر خلاف ناوگان کامیون های بزرگ، مشکلات توزیع وسایل نقلیه معمولی در مطالعات مختلف حل شده است و الگوریتم های تطبیق نقشه توجه را در مدیریت حمل و نقل برای لجستیک اطلاعاتی جلب کرده است. روش های آماری نیز برای تجزیه و تحلیل مدیریت خودرو با کاربردهای GIS استفاده شده است. اطلاعات بیشتر داده کاوی مکانی، مدل های آماری، روش های طبقه بندی و تحلیل های رگرسیون فضایی در [ 8 ، 12 ، 13 ، 14 ] یافت می شود.
2.1. الگوریتم های تطبیق نقشه
بسیاری از الگوریتمهای تطبیق نقشه در مطالعات ناوبری برای تطبیق موقعیتهای GPS استفاده میشوند و مطالعات زیادی در مورد تصحیح خطای موقعیت انجام شده است. برای انحرافات موقعیتیابی، بسیاری از محققان الگوریتمهای تطبیق نقشه موجود را برای حل مشکلات موقعیتیابی نادقیق و تنظیم خطاها گسترش دادهاند. اطلاعات هندسی می تواند از تطابق نقطه به نقطه، نقطه به منحنی یا منحنی به منحنی استفاده کند [ 15 ]، و این سه روش برای توسعه مطالعات تطبیق نقشه برای حمل و نقل و سایر مناطق برای توسعه کارایی در داده های مکانی گسترش یافته است. مدلسازی، تطبیق شبکه جادهای و تجسم برای حمل و نقل در طیف وسیعی از کاربردها [ 16 ، 17 ، 18 ].
توسعه حمل و نقل و SIT ارتباط تنگاتنگی با یکدیگر دارند. رویکردهای تطبیق نقشه به چهار دسته اصلی مرتب شده اند: الگوریتم های هندسی، توپولوژیکی، احتمالاتی و پیشرفته [ 4 ، 19 ، 20 ]. Velaga و Quddus [ 21 ] عملکرد تطبیق نقشه را با استفاده از تشخیص و تصحیح خطا بهبود دادند. قدوس و همکاران [ 13] از تجزیه و تحلیل آماری برای مقایسه عملکرد الگوریتم های تطبیق نقشه های هندسی، احتمالاتی و منطق فازی استفاده کرد. برای کاربردهای آماری بیشتر، روش احتمالی مبتنی بر تطابق تاریخی نتایج برای مطابقت با موقعیت فعلی وسایل نقلیه است. از احتمال و آمار برای ساخت مدل های خطا با دریافت داده های GPS استفاده شد و از روش های آماری برای SIT استفاده شد. به منظور بهبود دقت موقعیت تطبیق، Pfoser و همکاران. [ 19 ] از یک روش تطبیق نقشه فازی برای مدیریت عدم قطعیت در سیستم مدیریت ناوگان استفاده کرد. لو و همکاران [ 22] یک روش تطبیق نقشه مدل پنهان مارکوف (HMM) را برای بهبود کارایی و دقت موقعیتیابی تلفن همراه پیشنهاد کرد و با استفاده از دادههای GPS مقایسه کرد تا عملکرد بهتری داشته باشد و نشان دهد که چنین مدلهایی میتوانند به حل مشکلات تطبیق جاده کمک کنند.
اخیراً، OpenStreetMap (OSM) به طور گسترده در بسیاری از مطالعات مورد بحث قرار گرفته و برای دستیابی به دقت مورد استفاده قرار گرفته است. OSM نوعی نقشه دیجیتالی است که می تواند آزادانه برای بازبینی انحراف بین مسیر موقعیت یابی و جاده های واقعی ویرایش شود. لیو و همکاران [ 23 ] محاسبات شعاع بافر را برای به روز رسانی نقشه راه جدید با داده های OSM ارائه کرد. فن و همکاران [ 24 ] تطبیق چند ضلعی را به عنوان یک رویکرد تطبیق نقشه برای شبکه های جاده ای OSM اعمال کرد که دقت و کارایی تطبیق بالایی را ارائه می دهد. بروولی و زامبونی [ 25] از روش تطبیق نقشه برای تأیید دقت مکانی مکانهای نقطهای و تشخیص خطاهای موقعیت در ردپای ساختمان با استفاده از نقشههای برداری OSM استفاده کرد. برای یکپارچهسازی اطلاعات شبکه جادهای، روشهای فوق همه ترکیبهای جادهای OSM را در اطراف منطقه مسیرهای وسیله نقلیه برای مطابقت با مسیر ترکیبی جستجو میکنند و سپس از جاده ترکیبی با بهترین تطابق به عنوان مسیر رانندگی فعلی استفاده میکنند. از آنجایی که شبکههای جادهای دارای ترکیبهای پیچیده مختلفی در مناطق شهری هستند، بیشتر مطالعات بر روی دقت موقعیتیابی متمرکز شدهاند.
سایر رویکردهای مرتبط به دنبال افزایش دقت موقعیت با استفاده از ترکیبات مختلف نقاط، خطوط و منحنی ها هستند. وایت و همکاران [ 1 ] خطای یک نقطه موقعیت GPS و شبکه جاده را با استفاده از فاصله منحنی به نقطه، فاصله منحنی به منحنی و زاویه منحنی به منحنی با اعمال مفاهیم در [ 15 ] محاسبه کرد. تطبیق نقشه مبتنی بر هندسه میتواند از فرکانسهای نمونهبرداری کم یا نمونهبرداری بالا به عنوان مبنایی برای بهبود فرآیند تطبیق مبتنی بر مسیر برای به دست آوردن دقت موقعیتیابی بیشتر استفاده کند [ 1 ، 26 ]]؛ فرکانسهای نمونهبرداری پایینتر برای سیگنالهای GPS ممکن است خطاهای موقعیتیابی و تلفات سیگنال زیادی داشته باشند. فاصله Fréchet در فرآیند تطبیق منحنی به منحنی استفاده میشود که مسیر استفاده از دادههای مسیر را برای انجام دقت موقعیتیابی تعیین میکند [ 27 ]، و الگوریتم تطبیق نقشه جهانی شامل یک روش تطبیق نقشه بر اساس این فاصله است. تطبیق نقشه محلی روش دیگری است و از تطبیق نقطه به خط استفاده می کند، اگرچه دقت تطبیق آن کمتر از تطبیق نقشه جهانی است. لیو و همکاران [ 22 ] یک روش تطبیق نقشه محلی و یک روش تطبیق بخش تقاطع را برای افزایش کارایی و دقت در شبکههای جادهای شهری پیشنهاد کرد. رویکرد توسعهیافته شامل اضافه کردن یک روش وزندهی در الگوریتم تطبیق نقشه است، برای مثال، همانطور که توسط Kuijpers و همکاران نشان داده شده است. [20 ] و قدوس و همکاران. [ 13 ]. هاشمی و کریمی [ 28 ] یک روش تطبیق نقشه مبتنی بر وزن را با استفاده از داده های شبکه جاده های شهری ارائه کردند، در حالی که کنگ و یانگ [ 29 ] شبکه های پیچیده را با امتیازهای وزنی برای اطمینان از دقت مورد مطالعه قرار دادند و روش های تطبیق نقشه های مختلف در [ 30 ] به کار گرفته شد. با این حال، این روش ها در حل مسائل تطبیق نقشه برای وسایل نقلیه به طور کلی موفق بوده اند، اما ناوگان کامیون های بزرگ چالش برانگیزتر هستند.
فناوری ITS در تجزیه و تحلیل داده های شناور وسیله نقلیه (FCD) که با استفاده از فناوری حمل و نقل هوشمند پیشرفته استخراج می شوند، استفاده می شود. لی و همکاران [ 9 ] استفاده از FCD در مقیاس بزرگ برای نظارت بر ترافیک مورد بحث قرار گرفت. با توجه به حجم دادهها، فناوریهای رایانش ابری از جمله Bigtable و MapReduce میتوانند به طور موثری برای مدیریت FCD سازگار شوند. ژنگ و همکاران [ 31 ] از فناوری MapReduce برای افزایش کارایی خودروی شناور با روشهای تطبیق نقشه استفاده کرد. چن و همکاران [ 11] یک الگوریتم تطبیق نقشه برنامه نویسی پویا چند معیاره ارائه کرد که می تواند با موفقیت برای تطبیق FCD استفاده شود. این تکنیک ماشین کاوشگر، که دادههای خودروی FCD را جمعآوری میکند، میتواند اطلاعات جادهای قابل توجهی را از ترافیک بلادرنگ به دست آورد. بنابراین، دادههای شناور خودرو میتواند برای بهروزرسانی شبکههای جادهای و کشف نقاط مورد علاقه استفاده شود.
همانطور که در بالا ذکر شد، رویکردهای بسیاری برای حل تصحیح خطای موقعیت [ 21 ، 22 ، 26 ، 27 ، 32 ] وجود دارد، اما مطالعات کمی در مورد بهبود کارایی برای روشهای تطبیق نقشه در شبکههای جادهای پیچیده و مدیریت ناوگان کامیونهای بزرگ وجود دارد. در این مقاله، بهبود کارایی یک نگرانی حیاتی برای مدیریت عملی ناوگان کامیون های بزرگ است.
2.2. ساختار داده های مکانی
ساختارهای داده های فضایی شامل فرمت های مبتنی بر برداری و مبتنی بر شطرنجی به خوبی مورد مطالعه قرار گرفته اند. این دو قالب دارای مزایای مختلفی در سناریوهای مختلف هستند [ 2 ، 5 ]. در سالهای اخیر، ساختارها و ویژگیهای دادههای مکانی با افزایش حجم دادهها پیچیدهتر شدهاند و به سطوح بالاتری از قدرت محاسباتی نیاز دارند. در پاسخ، فناوریهای مختلف بهطور گسترده برای مدیریت دادههای فضایی در مقیاس بزرگ اتخاذ شدهاند [ 12 ، 18 ، 33 ، 34 ، 35 ].
ساختار داده برداری نمایشی از اطلاعات فضایی دنیای واقعی را ارائه می دهد. منظر دنیای واقعی شامل مناطق سطحی، زمینی و زیرزمینی همراه با ویژگی های مختلف جغرافیایی است. داده های برداری توسط نقاط، خطوط یا چند ضلعی ها بر اساس محیط مکانی و اطلاعات جغرافیایی ردیابی می شوند، در حالی که داده های ویژگی به مواد توصیفی اشاره می کنند که از متن یا اعداد تشکیل شده است. نقاط را می توان با قرار داد ایکسو yمختصات، در حالی که شبکه های جاده ای را می توان با خطوط نشان داد. چند ضلعی ها رایج ترین نوع اطلاعات فضایی هستند و یک جعبه مرزی می تواند یک منطقه فضایی پیچیده را نشان دهد. یک مرزبندی مبتنی بر داده های بردار در پلت فرم GIS گنجانده شده است. فرض کنید یک نقطه ( s ) هدف در یک چند ضلعی قرار می گیرد، به این معنی که نقطه گرفته شده است. وقتی s یک مختصات دارد ( ایکسس، yس، مساحت چند ضلعی های معادلات (1) و (2) که در [ 5 ] شرح داده شده است، به صورت بیان می شود.
جایی که ایکسمترمنn، ایکسمترآایکس، Yمترمنn، و Yمترآایکسمقادیر ویژه رئوس را نشان می دهد. یک شبکه جاده ای که بر اساس قالب بردار توصیف شده است، دارای گروهی از بخش ها و گره های مرتبط است.
فرمت مبتنی بر شطرنجی موقعیت مکانی را برای هر شبکه با برچسب گذاری شبکه با شماره سریال ردیف و ستون ارائه می دهد و هر شبکه را بر اساس خاصیتی که به طور کامل تمام اطلاعات جغرافیایی را نشان می دهد رمزگذاری می کند. منطقه واقعی نشان داده شده توسط یک سلول شبکه بر روی زمین، وضوح فضایی شبکه است. هرچه وضوح تصویر بالاتر باشد، نرخ تشخیص فضایی بیشتر است. علاوه بر این، برای کاربردهای مبتنی بر شطرنجی، از روش تحلیلگر دیفرانسیل دیجیتال (DDA) می توان برای گرفتن مرز چند ضلعی شبکه استفاده کرد. پر کردن جبر مرزی (BAF)، که بر اساس مفهوم ادغام است، الگوریتمی برای رویکرد تبدیل برداری به شطرنجی است. علاوه بر این، بخش شبکه از مرز چند ضلعی را می توان با BAF [ 5 ] گرفت]. ساختارهای درختی رایج مانند R-tree و Quadtree در [ 5 ، 36 ] بحث شده است. R-tree راه حلی است که برای غلبه بر این محدودیت استفاده می شود که یک گره فقط می تواند دو گره فرعی داشته باشد. Quadtree یک تکنیک ساختار داده سلسله مراتبی است که فضا را با تقسیم آن به چهار ربع رمزگذاری می کند تا زمانی که مقدار رمزگذاری ویژگی ربع فرعی فقط یک شود. Quadtree یک روش رایج ساختار داده و فشرده سازی تصویر در کاربرد GIS است. روش Quadtree یک ساختار داده بسیار مفید برای بسیاری از برنامه های کاربردی پایگاه داده فضایی فراهم می کند. سان و همکاران [ 36 ] یک روش شناسایی منحصر به فرد را با استفاده از یک شبکه Quadtree پیشنهاد کردند، و Yao و Li [ 18 ] سایر تکنیک های مترقی مانند معماری Hadoop را برای Quadtree فهرست کردند.
فشرده سازی داده ها یک تکنیک کدگذاری است که میزان فضای مورد نیاز برای ذخیره سازی داده ها را کاهش می دهد. این یک تکنیک مهم برای کاهش فضای ذخیره سازی داده های شطرنجی است. از آنجایی که حجم زیادی از داده های شطرنجی از کاوشگر خودرو مبتنی بر GPS جمع آوری می شود، یک رویکرد مناسب برای فشرده سازی داده ها برای بهبود کارایی پردازش داده ها استفاده می شود. دو روش اصلی فشرده سازی وجود دارد. رمزگذاری طول اجرا (RLE) یکی از کاربردهای الگوریتمهای فشردهسازی داده است و فشردهسازی بسیار کارآمدی را ارائه میدهد که میتواند به فشردهسازی دادهها یک بعدی دست یابد. زمانی که نقشه ها بیش از حد پیچیده می شوند، تعداد نمونه های تصادفی افزایش می یابد. روش محبوب توسعه یافته کد دیجیتال Quadtree Morton (کد Quadtree MD) است که برای دستیابی به فشرده سازی دو بعدی استفاده می شود. کد MD Quadtree برای کاهش تعداد داده های شطرنجی بازیابی شده و کاهش زمان نیاز به شناسایی مکانی استفاده می شود. به عنوان مثال، کد RLE و Quadtree MD را می توان در صورتی که چند ضلعی ها دارای اشکال بسیار باریک نباشند استفاده کرد. هدف از انتخاب حالت و کدگذاری دستیابی به فشرده سازی کارآمد [5 ، 36 ].
فرمت مبتنی بر برداری نیاز به رویه های پیچیده ریاضی دارد، در حالی که قالب مبتنی بر شطرنجی از معادلات ریاضی دشوار یا زبان های برنامه نویسی استفاده نمی کند. به طور کلی فرمت مبتنی بر برداری دقت بالایی دارد اما در مورد مدیریت ناوگان بزرگ باید هزینه های پردازش را در نظر گرفت که ممکن است به دلیل حجم داده ها بالا باشد. نقشههای دیجیتال مبتنی بر دادههای شطرنجی نیز میتوانند در دورههای طولانی در صورت ساخت مناسب مفید باشند.
3. روش تحقیق
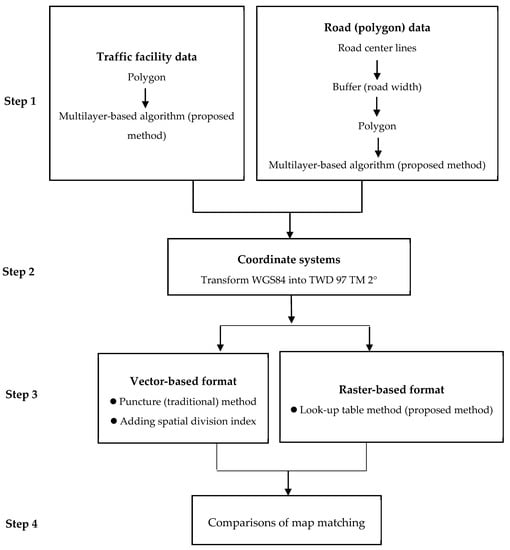
از آنجایی که بازگشت داده های مختصات از وسایل نقلیه مستمر است، پلت فرم مدیریت ناوگان ممکن است به سرعت بارگذاری شود. این مقاله از یک روش نقطه به چند ضلعی برای مقابله با حجم و نرخ بالای دادههای GPS موقعیت مکانی بازگردانده شده توسط ناوگان کامیونهای بزرگ استفاده میکند. ما همچنین از همین فناوری برای پردازش دادههای مکان ناوگان بزرگ استفاده کردیم و دریافتیم که ترکیبهای گروهبندی چند لایه میتواند برای کاهش بارگذاری استفاده شود. شکل 1 چهار مرحله از فرآیند برای دستیابی به بهبود کارایی را با یک الگوریتم جدید مبتنی بر چند لایه برای تطبیق نقشه نشان می دهد.
مرحله 1: در ابتدا، دو رویه برای تسهیلات ترافیکی و داده های جاده وجود دارد. تسهیلات ترافیکی را می توان به صورت چند ضلعی ساخت. برای داده های جاده، خطوط مرکزی با استفاده از داده های برداری از ArcGIS [ 37 ] جمع آوری می شود. از این خطوط مرکزی برای تولید بافرها استفاده شد و سپس جاده را می توان به صورت چند ضلعی ساخت. برای تطبیق نقشه مبتنی بر چند لایه، ما یک سیستم مدیریت ناوگان بزرگ بر اساس پایگاه داده زبان پرس و جو ساخت یافته (SQL) برای چندین بخش از داده های شبکه جاده برای پردازش تطبیق نقشه ایجاد کردیم.
مرحله 2: داده های ناوگان کامیون از GPS داخلی و مختصات هواپیما TWD 97 TM 2° برای آزمایش نمونه جمع آوری شد.
مرحله 3: روش سوراخ (سنتی) با استفاده از داده های برداری که ساختارهای مرتبط تر اما پیچیده تری دارند برای تقسیم بندی و ترکیب نقشه دیجیتال استفاده شد. پس از آن، ما از یک روش بهبود استفاده کردیم، که یک شاخص تقسیم فضایی را اضافه کردیم، که هنوز به روشهای پیچیده ریاضی نیاز دارد. از آنجایی که دادههای مقیاس بزرگتر برای دریافت استفاده میشوند و باعث ایجاد گلوگاه محاسباتی میشوند، ما یک روش جدول جستجو با استفاده از دادههای شطرنجی برای بهبود کارایی پیشنهاد کردیم.
مرحله 4: مقایسه روش های مبتنی بر دو نوع داده برای ارائه راهنمایی برای مدیریت ناوگان کامیون های بزرگ انجام شد.
3.1. تطبیق نقشه مبتنی بر چند لایه
برای ساخت چارچوب ساختار چند لایه در مرحله 1، ما فرض کردیم که نقشه دیجیتال شبکه راه های ملی یک شبکه تک خطی را در قالب بردار بر اساس خطوط مرکز جاده گرفته است. خطوط مرکز جاده برای تکمیل مراحل تبدیل بخش ها استفاده شد. این روش ها شامل طبقه بندی داده های جاده، تعریف بخش ها و محدوده تاسیسات، و تعیین فاصله نقطه اطراف است.
در گذشته شبکههای جادهای بر اساس هر بخش از جاده توصیف میشد اما به طور کلی مورد توجه قرار نمیگرفت. ناوگان کامیون های بزرگ معمولا مسیرهای مشترکی برای اعزام دارند. برای افزایش فناوری کارایی تطبیق نقشه در یک سیستم مدیریت ناوگان، ما یک روش چند لایه با شبکههای جادهای برای اعزام ناوگان بزرگ پیشنهاد کردیم. ما پیشنهاد می کنیم که محدودیت شبکه های جاده ای را می توان به دو دسته تقسیم کرد، یعنی. امکانات ترافیکی و جاده ها و می توان به صورت
که در آن GPS مقدار ( QTY ) داده های GPS است. TF مقدار داده های GPS را برای هر تسهیلات ترافیکی نشان می دهد و I دسته بندی TF وجود دارد. R مقدار داده های GPS را برای هر جاده نشان می دهد و j دسته R وجود دارد. معمولاً امکانات ترافیکی نسبت به جاده ها دسته بندی های کوچک تری دارند. هنگامی که حجم داده های ناوگان کامیون های بزرگ افزایش می یابد، افزایش کارایی بسیار مهم است. چندین لایه از اطلاعات شبکه راه ها گرفته شده است. برای برنامه ریزی مسیرهای دیسپاچینگ کامیون های بزرگ، انتخاب چند لایه را می توان با شبکه جاده مرتبط کرد. این مطالعه شبکه راه ها را به عنوان اثر متقابل تسهیلات ترافیکی و جاده ها در نظر گرفت. ترکیبات مختلف می توانند بر عملکرد الگوریتم تطبیق نقشه تأثیر بگذارند. تطبیق نقشه مبتنی بر چند لایه می تواند تأثیر مهمی بر کارایی الگوریتم تطبیق نقشه داشته باشد. بنابراین، ما این رویکرد را برای افزایش کارایی کلی برای تعیین موقعیت نقشه پیشنهاد کردیم.
3.2. تبدیل مختصات
در اجرای تطبیق نقشه، این مطالعه همچنین از تبدیل مختصات برای بهبود بازده زمانی استفاده کرد. در مرحله 2، از تبدیل مختصات خطی برای افزایش عملکرد تطبیق نقشه استفاده کردیم و از ناحیه تبدیل مختصات با فاصله 2 دقیقه قوسی برای روش تبدیل استفاده کردیم. در اینجا، ما فرمولهای تبدیل مختصات خطی را همانطور که در [ 38 ] توضیح داده شد، اتخاذ کردیم. این به صورت زیر نوشته شده است:
جایی که ایکسو Y، به ترتیب، مقادیر مختصات صفحه را نشان می دهد. γو θمقادیر طول و عرض جغرافیایی هستند. ایکس0و y0مقادیر اولیه تبدیل نواحی مختصات هستند. γ0و θ0مقادیر اولیه طول و عرض جغرافیایی هستند. و آγ، آθ، بθو بγضرایب نامشخص هستند. هنگام اعمال رویه های تبدیل، مقادیر آγ، آθ، بθ، و بγممکن است به دلیل مکان و اندازه ناحیه تبدیل مختصات متفاوت باشد. آγو بθضرایب تبدیل کلیدی از طول و عرض جغرافیایی به ایکسو Yمختصات آγو بθیک رابطه متناسب داشته باشد آθو بγضرایب تبدیل کمکی هستند، که در آن آθنشان دهنده افزایش عرض جغرافیایی یکسان با طول جغرافیایی است، و بγنشان دهنده افزایش طول جغرافیایی یکسان با عرض جغرافیایی است. علاوه بر این، Δγو Δθافزایش طول و عرض جغرافیایی از مبدأ تا انتهای ناحیه تبدیل مختصات است. محدوده چهار نقطه، ( γ0،θ0)، ( γ0+Δγ،θ0)، ( γ0+Δγ،θ0+Δθ، و ( γ0،θ0+Δθ، یک ناحیه تقریبا ذوزنقه ای شکل را فراهم می کند. از آنجا که Δγو Δθبسیار کوچک هستند، طول و عرض جغرافیایی را می توان تقریباً موازی در نظر گرفت. یک تناظر خطی بین مختصات جغرافیایی نقاط و افزایش طول و عرض جغرافیایی نقاط نسبت به ( γ0،θ0) و هواپیما مختصات. علاوه بر این، خطاهای تبدیل را می توان در محدوده معینی برای ناحیه تبدیل مختصات کنترل کرد [ 38 ، 39 ]. با استفاده از تکنیک کاهش ابعاد، تبدیل خطی می تواند تبدیل پیچیده را ساده کرده و تبدیل مختصات سنتی را افزایش دهد.
3.3. روش های مقایسه ای
این مطالعه الگوریتم تطبیق نقشه مبتنی بر چند لایه پیشنهادی ما را در هر دو ساختار داده مکانی، برداری و شطرنجی (مرحله 3)، به منظور مقایسه عملکرد (مرحله 4) ارزیابی میکند. الگوریتم نقطه در چند ضلعی شرح داده شده در [ 40 ، 41 ] برای تأیید کارایی عملکرد با استفاده از روش سوراخ (سنتی) برای تعیین اینکه آیا نقطه در چند ضلعی قرار می گیرد یا خیر، استفاده شد. در این سناریو، روش سوراخسازی را میتوان با دادههای برداری برای پردازش نگاشت بین مختصات و ویژگیهای نقشه استفاده کرد و میتواند برای الگوریتمهای تطبیق نقشه [ 39 ] اعمال شود.
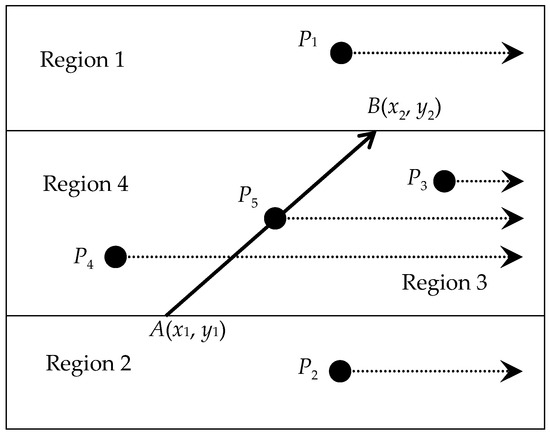
این مقاله روش سوراخکاری را به طراحی شبکه جادهای پیچیده چند لایه گسترش میدهد. آن اشعه را فرض کنید آب→گسترش می یابد آ(ایکس1،y1)به اشاره ب(ایکس2،y2)، و پ(ایکس3،y3)نقطه اولیه ایجاد پرتو از چپ به راست است. برای هر لبه چند ضلعی، از روش سوراخ برای تعیین روشن بودن P استفاده می شود آب→یا اگر P و آب→متقاطع شده اند. سپس همانطور که در شکل 2 نشان داده شده است، این را برای روش سوراخ کردن به چهار منطقه تشخیص می دهیم . خطوط P 1 و P 2 و P 3 و آب→قطع نمی کنند، در حالی که P 4 و آب→متقاطع شده اند. P 5 روی پرتو است آب→و P 5 در چند ضلعی است. برای ارائه تمام یالهای رئوس روی چند ضلعی، مختصات y محصول تفاوت با
جایی که yبرای P است . yمنبرای A است و yمن+1برای B است. همانطور که در بالا گفته شد، نواحی چند ضلعی A ، B و P را می توان به صورت نشان داد
اگر اس > 0، P در سمت چپ است آب→;
اگر اس < 0، P در سمت راست است آب→;
اگر اس = 0، وقتی y-Vآلتوه ≤ 0، P روی پرتو است آب→. در غیر این صورت، P در خط توسعه یافته است آب→.
یک چندضلعی قطعه در جدول داده های گره پیوسته با استفاده از روش سوراخ سازی ساخته شد. چند ضلعی مجموعه ای از مختصات گره است که بر روی ویژگی ساخته شده است. رویکرد پیشنهادی از ویژگی های چند ضلعی به عنوان بخش های جاده استفاده می کند. این مانند یک حصار الکترونیکی عمل می کند، جایی که عدد مربوط به ویژگی کد بخش است. مختصات نقاط اطراف از نقاط اطراف در خط محیطی قطعات تشکیل شده است. تعداد نقاط اطراف با توجه به اندازه ناحیه قطعه تنظیم می شود و چگالی مختصات اطراف بر ظرافت قطعات تأثیر می گذارد. در این مطالعه 50 متر به عنوان معیار جمع آوری نقاط اطراف استفاده شد. هنگام در نظر گرفتن طول یک بخش جاده، هدف این است که ناوگان کامیون های بزرگ با سرعت عادی در جاده حرکت کنند. که در آن هر بازگشت می تواند در یک بخش متفاوت باشد. در هنگام استفاده از روش سوراخ کردن برای پردازش مقادیر زیادی داده، ممکن است تنگناهای عملکردی رخ دهد. به طور کلی، تکنیک های پیچیده ریاضی و محاسباتی برای ساختارهای داده برداری مورد نیاز است و زمانی که منابع داده خود پیچیده باشند، حل مسائل دشوار می شود.
رویکرد دوم شامل اضافه کردن شاخص تقسیم فضایی در روش سوراخسازی است. به این ترتیب می توان از یک عملیات تقسیم ساده برای تعیین سریع مختصات نقطه ای بلوک مربع استفاده کرد. این الگوریتم تطبیق نقشه مبتنی بر چند لایه از روشی با شاخص تقسیم فضایی استفاده می کند. با این حال، داده های در مقیاس بزرگ می توانند به طور جدی کارایی بازیابی را کاهش دهند. اگر جدول شاخص تقسیم فضایی به خوبی ایجاد شده باشد، میتواند به طور موثرتری بهبودهای تطبیق نقشه مبتنی بر چند لایه را تعیین کند.
با توجه به ادبیات [ 40]، نویسندگان به این نتیجه رسیدند که چند ضلعی در قالب شطرنجی با استفاده از روش شبکه به دلیل چند محاسبات ریاضی کارآمدتر است. بنابراین، ما این ایده را گسترش دادیم و رویکرد سومی را پیشنهاد کردیم که شامل یک روش جدول جستجو با استفاده از قالب مبتنی بر شطرنجی است. ساختار داده شطرنجی دارای اندازه مربعی مشابه با شبکه است و به ریاضیات پیچیده نیاز ندارد. برای رویههای شبکه، DDA برای گرفتن شبکههای مرز چندضلعی در نظر گرفته میشود. نقطه شبکه مرزی چند ضلعی عملیات استخراج در بین بخش ها به اشتراک گذاشته شده است. روش DDA از شیب یک پاره خط برای گرفتن یک نقطه شبکه روی یک خط در فاصله واحد (حداقل اندازه شبکه) برای تعیین مقدار صحیح مربوطه در محور دیگر نزدیکترین خط استفاده می کند. مرز چند ضلعی داده های شبکه را می توان بدون استفاده از توابع مثلثاتی پیچیده استخراج کرد. BAF برای تعیین کل شبکه در چند ضلعی استفاده می شود. کل شبکه های چند ضلعی با استفاده از DDA و BAF به دست می آیند. رمزگذاری و فشرده سازی آخرین مراحل مورد نیاز برای تکمیل رویه مبتنی بر شطرنجی قبل از آماده شدن پایگاه داده فضایی شبکه برای استفاده است.
سه رویکرد ساختار داده مکانی فوق را می توان برای مقایسه عملکرد با استفاده از تطبیق نقشه مبتنی بر چند لایه استفاده کرد. بر اساس رابطه (3)، معادله ای برای محاسبه زمان به صورت زیر ساختیم:
جایی که T نشان دهنده زمان محاسبه است. تعداد GPS شامل تعداد تسهیلات ترافیکی و جاده ها از داده های GPS است. Pu روش سوراخ کردن است. Ind روش سوراخ با شاخص تقسیم فضایی است. اسبر اساس معادله (7) است. Lt روش جدول جستجو است. و n نمونه ای را نشان می دهد که کران پایینی دارد ( nL) و کران بالایی ( nU) نمونه ها. به طور کلی، نمونه بر اساس مقیاس ناوگان کامیون های بزرگ است. این مطالعه با هدف استفاده از این روش مبتنی بر چند لایه با ساختار دادههای مختلف برای دستیابی به بهبود مؤثر برای تطبیق نقشه تحت منابع نرمافزاری و سختافزار محدود موجود انجام شد.
4. نتایج و تجزیه و تحلیل
این بخش نتایج مقایسه را با استفاده از الگوریتم های تطبیق نقشه چند لایه نشان می دهد. بر اساس تطبیق نقشه فضایی یک شبکه جاده ای پیچیده، این مطالعه از داده های برداری تک خطی مرکز جاده های ملی نقشه الکترونیکی تولید شده توسط مرکز تحقیقات GIS، دانشگاه فنگ چیا (GIS.FCU) استفاده کرد و بخش ها را بر اساس بافرها پردازش کرد. عرض جاده سپس این روش از نقاط اطراف در محیط بخش های جاده برای تولید گره های بخش های جاده استفاده می کند. ما دستههای مختلفی از بخشها را در شبکههای جادهای تایوان برای مطالعه موردی اتخاذ کردیم. این مطالعه یک الگوریتم تطبیق نقشه کاربردی را ارائه میکند و مختصات جغرافیایی را به طور موثر با یک مسیر واقعی مطابقت میدهد. دادههای تجربی، سوابق رانندگی ماشین GPS واقعی از مجموعه داده ناوگان کامیونهای بزرگ تایوان بودند. که از کیت های ماشین روی کامیون های بزرگ جمع آوری می شد. مختصات از کامیون های بزرگ آماده سفر گرفته شد و نسبت مختصات GPS برای مطابقت با جاده واقعی برای ناوبری انتخاب شد.
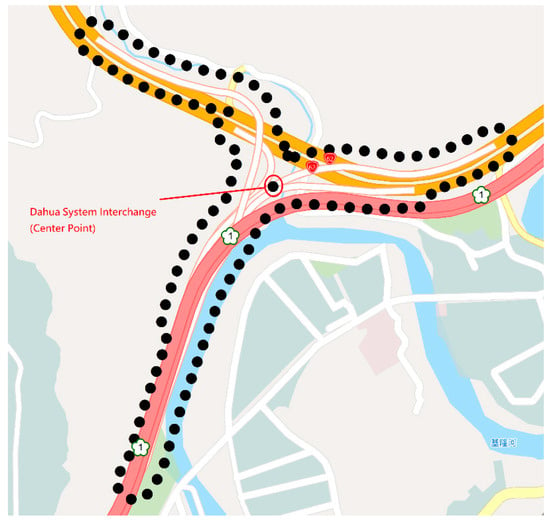
ما در نظر گرفتیم که تسهیلات ترافیکی شامل مبادله و ایستگاه خدمات است. راه ها شامل بزرگراه های سراسری، بزرگراه های سریع السیر، بزرگراه های استانی، بزرگراه های شهرستانی، جاده های منطقه و جاده های عادی بود. سیستم مدیریت ناوگان بزرگ ما شامل دادههای بخش مرتب شده در جدول 1 است. امکانات ترافیکی و جاده ها به عنوان لایه های هشت بخش در جزیره اصلی تایوان از ابزارهای GPS نصب شده بر روی کامیون های بزرگ جمع آوری شد. جدول 2 نشان می دهد که مقدار ( QTY) داده های GPS دارای یک میلیون نقطه داده تجربی است. انتقال نسل چهارم استانداردهای فناوری ارتباطات تلفن همراه (4G) بود. داده های منبع از 35 کامیون با هشت ساعت کار در روز به مدت یک ماه جمع آوری شد و فاصله نمونه گیری 30 ثانیه بود. مختصات هواپیما در سیستم مدیریت ناوگان بزرگ استفاده شد، بنابراین نوع کوه نگاری در این مطالعه در نظر گرفته نشد. جدول 3 نمونه ای از تبادل را نشان می دهد که شامل یک نقطه مرکزی و 99 راس از سیستم ما است. یک چند ضلعی از 99 راس تشکیل شده بود. شکل 3 مثال جدول 3 را بر روی نقشه با استفاده از نرم افزار ArcGIS نشان می دهد. هنگامی که یک نقطه در این چند ضلعی قرار می گیرد، اطلاعات نقطه می تواند در قسمت عنوان نمایش داده شود.
برای مقایسه تطبیق نقشه دو نوع ساختار داده، لازم است مختصات ژئودتیکی به مختصات صفحه تبدیل شود. برای همه مختصات GPS، مختصات ژئودتیکی WGS 84 طول و عرض جغرافیایی را می توان بلافاصله از طریق فرمول های تبدیل خطی برای تبدیل آنها به مختصات صفحه TWD 97 TM 2 درجه تایوان استفاده کرد. دامنه اجرا و آزمایش بر اساس جزیره اصلی تایوان بود. محدوده دامنه از 120 درجه تا 122 درجه طول شرقی، 21 درجه و 55 دقیقه تا 25 درجه و 31 دقیقه عرض شمالی، 216 دقیقه قوسی به سمت جنوب و شمال، و 120 دقیقه قوس از شرق و غرب عبور می کرد. با توجه به 2 بخش دقیقه قوسی، 60 × 108 منطقه تبدیل مختصات وجود دارد. دو ترتیب در جدول 4 به صورت زیر بیان شده است:
جایی که نθترتیب طول جغرافیایی است و θمقدار طول جغرافیایی را نشان می دهد. نγترتیب عرض جغرافیایی است و γمقدار عرض جغرافیایی (واحدها: دقیقه قوسی) را نشان می دهد. در اینجا، 120 درجه 7200 دقیقه قوسی، 21 درجه و 55 دقیقه 1315 دقیقه قوسی، 2 نشاندهنده بخشهای دقیقه قوسی، و براکتهای مربع نشاندهنده نماد گاوس است.
این مقاله از دو فرمول تبدیل مختصات خطی با فاصله کمانی با شش پارامتر، همانطور که در جدول 4 نشان داده شده است، استفاده کرد . نمادها قبلاً در معادلات (9) و (10) توضیح داده شده اند. 60 شماره سریال طول جغرافیایی و 108 شماره سریال عرض جغرافیایی وجود داشت که در مجموع 6480 نقطه را نشان می داد. نتایج نشان داد که خطاهای تبدیل را می توان در عرض یک متر کنترل کرد، که نشان دهنده بهبود کارایی کلی تطبیق نقشه است.
به عنوان مثال، فرمولهای تبدیل خطی به کار گرفته شده در این مطالعه از دو بازه دقیقه قوسی برای تبدیل مختصات WGS84 به TWD 97 استفاده میکنند که معمولاً سیستم پیشبینی مختصات مورد استفاده در تایوان است. خطاهای تبدیل هم از نظر طولی و هم در عرض یک متر بود. زمان محاسبه تبدیل خطی حدود 1.737 × 10-5 ثانیه بود. برای تبدیل مختصات سنتی با استفاده از ابزار نرم افزار GIS، زمان محاسبه 2.784 × 10-5 ثانیه [ 39 ] بود. بنابراین، تبدیل خطی در این مطالعه برای افزایش کارایی مطالعه موردی ناوگان کامیون های بزرگ ما استفاده شد.
علاوه بر این، فضا به صورت افقی و عمودی به 5000 متر تقسیم شده است. با استفاده از جزیره اصلی تایوان به عنوان محدوده، مختصات مبدا (135000؛ 2400000) از مختصات گوشه پایین سمت چپ (که مختصات مبدا (135000؛ 2400000) هستند) تا مختصات گوشه سمت راست بالا (355000؛ 2.800; 2.80) است. به بلوک های مربع 44 × 80. در روش عملیاتی تجربی، مختصات طول و عرض جغرافیایی به مختصات صفحه TM 2 درجه تبدیل میشوند و مختصات صفحه از مختصات مبدا کسر میشوند (135000؛ 2400000). مقادیر مختصات بر فاصله تقسیم 5000 متر تقسیم می شوند و ( ایکسمن، Yمن) مقادیر شاخص با استفاده از معادلات (11) و (12) هستند. مثلاً با این فرض ایکس230529 است و Y2,621,656 است، مقادیر کد ایندکس را می توان به صورت زیر ارائه کرد:
علاوه بر این، فرمت مبتنی بر شطرنجی شامل رمزگذاری افقی، رمزگذاری عمودی و کد MD Quadtree است. از آنجایی که بیشتر جادههای تایوان در جهت شمال و جنوب هستند، رمزگذاری عمودی و فشردهسازی بهترین عملکرد را دارند. روند رمزگذاری و فشردهسازی ممکن است زمان ببرد، اما میتوان آن را با بهبودهای بعدی بازده جایگزین کرد، زیرا نقشههای دیجیتال اغلب تغییر نمیکنند.
برای خروجی معادله (8)، زمان محاسبه ( T ) تقسیم بر 50 اجرا، میانگین زمان پردازش (یعنی میانگین مورد) است که با فرمول زیر محاسبه می شود:
برای نتایج، عملکرد بهترین و بدترین حالت نشان داده شده است. آزمایش ها شامل 100000 نمونه با 50 اجرا بود و نتایج محاسباتی در جدول 5 نشان داده شده است. با توجه به عملکرد لایههای تک بخش برای روش سوراخکاری، جادههای معمولی بدترین نتایج را ارائه میدهند. همه مقادیر بزرگ بود. یک لایه بخش جداگانه برای روش سوراخ کردن با افزودن یک شاخص تقسیم فضایی عملکرد قابل توجهی بهبود یافته را نشان داد. مقادیر زمان محاسباتی بین 24 و 1076 ثانیه بود. اضافه کردن شاخص تقسیم فضایی کارآمدتر از استفاده از روش سوراخسازی بود، به جز برای ایستگاههای خدمات.
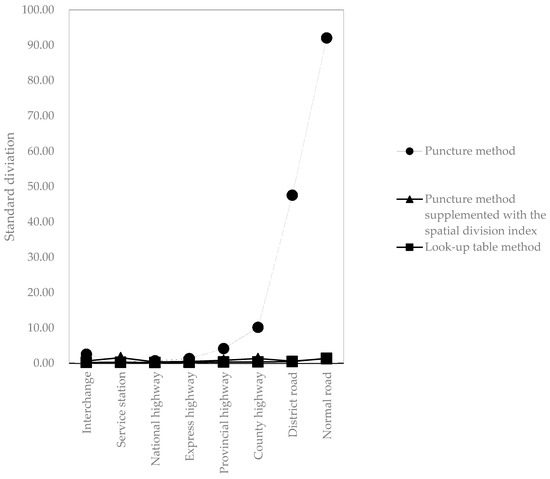
با توجه به این نتیجه 50 اجرا، همانطور که جدول 5 نشان می دهد، مقادیر برای حالت عادی جاده کمی بالاتر از هفت لایه دیگر بود. روش جدول جستجو نتایج عالی فهرست شده در جدول 5 را به همراه داشت. بهترین حالت برای جاده های معمولی با استفاده از روش جدول جستجو عملکرد خوبی داشت، از 11654 تا 14 ثانیه. از آنجایی که مقدار ایستگاه خدمات داده کمتری داشت و توزیع موقعیت پراکنده بود، ایستگاه های خدمات با شاخص تقسیم فضایی ممکن است کارآمد نباشند. شکل 4نشان می دهد که روش پنچری افزایش شدیدی را از بزرگراه شهرستان ایجاد کرده و شامل 100000 نمونه با 50 ران شده است. به طور کلی، روش جدول جستجو با لایههای بخش جداگانه میتواند عملکرد پایدارتری نسبت به دو روش دیگر ایجاد کند.
همانطور که در بالا گفته شد، اگر یک جاده معمولی به عنوان لایه اول انتخاب شود، فرآیند محاسباتی ممکن است زمان زیادی را ببرد. بنابراین، یک جاده معمولی نباید به عنوان اولین لایه انتخاب شود. علاوه بر این، هنگامی که محاسبات جداگانه هر لایه انجام شد، ترکیب همه لایهها با هم ممکن است زمانبر باشد. برای بهبود کارایی، تبادلات و ایستگاه های خدمات را برای تسهیلات ترافیکی و شش لایه دیگر را برای جاده ها گروه بندی کردیم.
در جدول 6 ، آزمایش ها هنوز 100000 نمونه را با 50 اجرا نشان می دهند. برای مقایسه محاسبات فردی با گروه بندی ها، جدول 6 بهتر از جدول 5 عمل کرد. گروه بندی راه ها بیشتر از گروه بندی امکانات ترافیکی زمان برد. در این مورد، روش پنچری کارایی اجرای فرآیند را کاهش داد و عملکرد خروجی را تحت تأثیر قرار داد. روش جدول جستجو هنوز به زمان محاسباتی بسیار کمتری نسبت به دو روش دیگر نیاز دارد. روش جدول جستجو نیز عملکرد پایداری را ایجاد کرد. سه دسته انحراف معیار در جدول 7 خلاصه شده است. برای تسهیلات ترافیکی و جاده ها، روش پنچری دارای انحرافات استاندارد بزرگتری بود. گروه بندی تسهیلات ترافیکی و جاده ها نتایج بهتری نسبت به استفاده از محاسبات لایه های جداگانه ارائه می دهد. همه لایههای هشتبخشی با هم گروهبندی شدند (یعنی امکانات ترافیکی و جادهها). روش سوراخسازی مقدار انحراف استاندارد بسیار بزرگ 49.8420 را ارائه میدهد، در حالی که دو روش دیگر انحراف استاندارد پایینی داشتند. بنابراین، ترکیبهای گروهبندی مختلف میتوانند بر کارایی تطبیق نقشه مبتنی بر چند لایه به روشهای مختلف تأثیر بگذارند. مقوله جادهها نیز پیچیدهتر از تسهیلات ترافیکی است، بنابراین استفاده از روش سوراخکاری با دادههای برداری ممکن است بارهای محاسباتی و تأخیرهای اضافی را به همراه داشته باشد. با این حال،
زمان محاسبه با استفاده از تمام لایههای هشت بخش با هم و میانگین زمان پردازش برای هر نقطه در نظر گرفته شد. آزمایشهای مشخص شده در جدول 8 هنوز 100000 نمونه را با 50 اجرا نشان میدهند. همانطور که در جدول 8 نشان داده شده است، روش سوراخ 2756.76 ثانیه طول کشید و میانگین زمان پردازش آن 0.0275676 ثانیه بود. زمان محاسبات برای روش سوراخکاری تکمیل شده با شاخص تقسیم فضایی 217.52 ثانیه و میانگین زمان پردازش آن 0.0021752 ثانیه بود. زمان محاسبه روش جدول جستجو 15.12 ثانیه و میانگین زمان پردازش آن 0.0001512 ثانیه بود. روش سوراخکاری تکمیل شده با شاخص تقسیم فضایی، کارایی را 12.67 برابر در مقایسه با روش بدون شاخص تقسیم فضایی بهبود بخشید. استفاده از روش جدول جستجو با شطرنجی به عنوان ساختار داده به همراه فناوری فشرده سازی داده، میانگین زمان پردازش تطبیق نقشه را 14.39 برابر نسبت به روش سوراخکاری تکمیل شده با شاخص تقسیم فضایی و 182.33 برابر نسبت به روش سوراخسازی بهبود بخشید. زمان محاسبه روش جدول جستجو کمترین زمان را داشت. درصد انحراف (PoD) بین بهترین راه حل (BS) و راه حل تا کنون (SSF) بود:
بر اساس رابطه (15)، در مقایسه سایر روشهای سوراخسازی با روش سوراخسازی تکمیلشده با شاخص تقسیم فضایی، بهبود 92.11 درصد بود. بنابراین، بهره وری به طور قابل توجهی بهبود یافته است. این نشان می دهد که شاخص تقسیم فضایی می تواند کارایی تطبیق نقشه را افزایش دهد. بالاترین بهبود 99.45 درصد بین روش سوراخ کردن و روش جدول نگاه کردن بود. از نظر میانگین زمان پردازش، روش سوراخسازی با شاخص تقسیم فضایی دومین رویکرد برتر بود. بنابراین، تطبیق نقشه بر اساس ساختار داده شطرنجی با استفاده از روش جدول جستجو، کارآمدتر از دو روش دیگر بود. شکل 5سه نمونه 10000، 50000 و 100000 را نشان میدهد و نشان میدهد که خط روش سوراخسازی در هنگام افزایش نمونه بالاتر از دو خط دیگر بود. این مطالعه از روش آزمون آماری با استفاده از آزمون نمونههای مستقل [ 42 ] استفاده کرد و مقادیر را در نرمافزار SPSS مرتب کرد. جدول 9 نشان می دهد که P- value برای آزمون Levene 0.000 بود که از نظر آماری در سطح P <0.05 معنی دار است. بنابراین، واریانس ها برابر نبودند. P – value آزمون T مستقل 000/0 بود که از نظر آماری در P معنی دار است.سطح <0.05 بنابراین، روش سوراخکاری تکمیل شده با شاخص تقسیم فضایی و روش جدول جستجو پیشرفت های قابل توجهی را ارائه می دهد.
برای ارزیابی عملکرد روش جدول جستجو، از چهار نمونه 10000، 50000، 100000 و 500000 استفاده شد. جدول 10 نشان می دهد که میانگین زمان پردازش برای هر نقطه با چهار نمونه کمتر از 0002/0 بوده است. بنابراین، روش جدول جستجو یک راه حل رقابتی برای استفاده از رویکرد تطبیق نقشه مبتنی بر چند لایه برای لایه های گروه هشت بخش است. در ردیف میانگین زمان پردازش هر نقطه، روش جدول جستجو عملکرد پایداری را با استفاده از نمونههای مختلف ارائه میکند. برای ارزیابی عملکرد، الگوریتم تطبیق نقشه مبتنی بر چند لایه با استفاده از جدول جستجو با دادههای شطرنجی بهترین کارایی را برای اعزام ناوگان کامیونهای بزرگ فراهم کرد.
رایانه مورد استفاده برای آزمایشهای تجربی، یک رایانه رومیزی با ویندوز 10 مایکروسافت، با پردازنده Core i5-9400F اینتل در 2.9 گیگاهرتز و 32 گیگابایت رم بود. شکل 6 مبادله بین کارایی و هزینه را نشان می دهد [ 39 ]. اول، زمانی که ساختار داده و رویههای الگوریتم یکسان هستند، با بهبود سختافزار و نرمافزار، میتوان به بهبود بازدهی نهایی پی برد. پس از ارتقاء سخت افزار و نرم افزار تا حدودی، افزایش بازده حاشیه ای به تدریج کاهش می یابد. حد بازده در شکل 6 نشان داده شده است. هنگام تعیین هزینه های سرمایه گذاری سخت افزار و نرم افزار، هزینه واقعی، هزینه قابل قبول بازار و سود باید در نظر گرفته شود. بهترین گزینه ممکن است ارتقاء تنها سخت افزار و نرم افزار نباشد.
در نهایت، این مطالعه از ساختارهای داده های مختلف برای بهبود موثر تطابق نقشه و به حداکثر رساندن کارایی تطبیق نقشه تحت محدودیت های نرم افزاری و سخت افزاری موجود استفاده کرد. بدیهی است که تعداد و پیچیدگی بخشهای جاده بر کارایی تطبیق نقشههای چندلایه با روش سوراخسازی تأثیر میگذارد، اما تعداد دادههای مختصات GPS تأثیر زیادی بر زمان محاسبه در هنگام استفاده از روش جدول جستجو ندارد. روش جستجو از یک پایگاه داده برای مرتب کردن داده های شطرنجی و ایجاد یک فهرست برای جستجو و تجزیه و تحلیل استفاده می کند. کاهش طول داده های شطرنجی و بهبود کارایی جستجو از طریق کدگذاری و فشرده سازی امکان پذیر است. روش شاخص تقسیم فضایی شامل تقسیم داده ها به چندین لایه و بلوک های بزرگ است. که به طور موثر تعداد داده های مورد جستجو را کاهش می دهد و کارایی تطبیق نقشه را بهبود می بخشد. اگرچه تطبیق نقشه مبتنی بر چند لایه با استفاده از دادههای شطرنجی، عناصر هندسی جزئی شبکههای جادهای را از دست میدهد، که بر دقت تأثیر منفی میگذارد، کارایی نیز افزایش مییابد.
5. بحث و نتیجه گیری
هدف این مقاله افزایش کارایی ناوگان کامیون های بزرگ برای دستیابی به تحویل به موقع بود. روش تطبیق نقشه مبتنی بر چند لایه پیشنهادی ما میتواند ترکیبهای گروهبندی مناسبی را برای مدیریت شبکههای جادهای پیچیده برای مدیریت ارسال ناوگان کامیونهای بزرگ فراهم کند. فرآیند تبدیل خطی برای مدیریت مختصات GPS در مدت زمان کوتاه و ارائه سریع تمام مختصات تبدیل در مطالعه موردی تأیید شد. به طور کلی، زمان محاسبه برای لایههای جداگانه بیشتر از زمان برای لایههای گروهبندی بود.
رویکرد تطبیق نقشه مبتنی بر چند لایه که در اینجا ارائه شده است، نتایج متفاوتی را با سه رویکرد مورد استفاده برای مقایسه کارایی ارائه میکند. استفاده از رایانه برای انجام روش سوراخ کردن زمان بر است. با این حال، روش سوراخسازی با تطبیق نقشه مبتنی بر چند لایه، میتواند میانگین زمان پردازش را برای هر نقطه کاهش دهد. ایجاد یک شاخص تقسیم فضایی برای روش سوراخسازی میتواند عملکرد را بهبود بخشد، زیرا نمایهسازی یک رویکرد فنی برای کاهش دامنه دادههای اطلاعاتی است. اگر چه زمانی که بسیاری از فیلدها ایندکس می شوند، شاخص ها پرس و جوها را سرعت می بخشند، اما حتی به فضای بیشتری نسبت به جدول داده های اصلی نیاز دارند. با حفظ سازماندهی جداول شاخص، زمان بیشتری برای تغییر داده ها نیاز است. افزودن شاخص تقسیم فضایی به عنوان دومین رویکرد بهترین توصیه می شود. فشردهسازی مبتنی بر شطرنجی نیز میتواند زمان زیادی را ببرد، مگر اینکه نقشه تحت بازبینیهای بزرگی قرار گیرد. بنابراین، نقشه های شطرنجی را نمی توان به طور مکرر در عمل دوباره ترسیم کرد.
مطالعات قبلی بر بهبود دقت موقعیت یابی خودرو متمرکز بوده و از روش تطبیق نقشه برای موارد کلی خودرو استفاده کرده است. این مقاله بر روی موقعیتیابی نقشه و عملکرد کارایی تمرکز داشت. نشان داده شده است که فرمت های مبتنی بر برداری و شطرنجی بسته به سناریوهای مختلف دارای مزایایی هستند و بنابراین در این مطالعه از رویکرد نقطه به چند ضلعی استفاده کردیم و سپس این فناوری ها و روش ها را برای بهبود عملکرد ادغام کردیم. بر اساس نتیجه گیری برای چند ضلعی ها در قالب شطرنجی از [ 40]، ما این ایده را برای حل کامیون های بزرگ با داده های موقعیت یابی در مقیاس بزرگ گسترش دادیم. این روش به مدیریت ناوگان کامیون های بزرگ کمک می کند و نشان می دهد که تطبیق نقشه مبتنی بر چند لایه با ساختار داده مبتنی بر شطرنجی می تواند اعزام ناوگان را بهبود بخشد. علاوه بر این، یک الگوریتم تطبیق نقشه مبتنی بر چند لایه با استفاده از روش جدول جستجو به معادلات ریاضی پیچیده یا زبان های برنامه نویسی نیاز ندارد و می تواند کمترین میانگین زمان پردازش را به همراه داشته باشد. هنگامی که حجم نمونه افزایش یافت، روش جدول جستجو عملکرد پایداری را ارائه داد. با افزایش ناوگان کامیون های بزرگ، رویکرد پیشنهادی ما می تواند گلوگاه محاسباتی را مدیریت کند. به طور کلی، تلفن های همراه توانایی محاسباتی محدودی دارند، اما نصب یک الگوریتم تطبیق نقشه مبتنی بر چند لایه با جدول جستجو در سیستم دیسپاچینگ می تواند بار را کاهش دهد.
محدودیت مطالعه ما این است که تداخل امکانات را در نظر نگرفتیم. به طور کلی، شبکه های جاده ای واقعی شامل تقاطع های نامنظم مختلفی هستند. تحقیقات آینده میتواند به تقاطعها در تأسیسات مبتنی بر گسترش مرکز جاده در یک فاصله معین در جهتهای افقی و عمودی، به جای استفاده از طرح چند ضلعی، رسیدگی کند. سازگاری داخلی، که یک موضوع قابلیت اطمینان است [ 43]، باید در ارزیابی های اولیه برای کاهش خطاهای نمونه و اندازه گیری به دست آید. در این مطالعه، سناریوی ناوگان کامیون کوچکتر هدف ما برای ارزیابی قابلیت مالی نبود، و صرفهجویی در مقیاس به گونهای است که احتمالاً از نظر اقتصادی در ناوگان کامیونهای بزرگ امکانپذیرتر است، اما این مورد در این مقاله مورد توجه قرار نگرفت. بنابراین، این مطالعه فقط بر روی کامیون های بزرگ متمرکز شده است. در آینده نزدیک می توان رویکرد مشابهی را در سایر مناطق و کشورهای دیگر به کار برد و انواع کوه نگاری را برای تحقیقات بیشتر در نظر گرفت. رویکرد تطبیق نقشه مبتنی بر چند لایه همچنین می تواند مکان ناوگان را برای مقایسه بیشتر با اندازه های مختلف خودروهای لجستیکی تعیین کند. این الگوریتم تطبیق نقشه مبتنی بر چند لایه با استفاده از روش جدول جستجو میتواند به عنوان یک مرجع مفید در افزایش عملکرد ناوگان کامیونهای بزرگ عمل کند. در نهایت، با بهبود کارایی، روش تطبیق نقشه پیشنهادی ما می تواند به رانندگان ناوگان کامیون های بزرگ کمک کند تا به سرعت مختصات نقطه مربوطه را به دست آورند و وظایف اعزام خود را تکمیل کنند.






بدون دیدگاه