

بهبود موقعیت یابی داخلی با استفاده از نقشه های شبکه اشغال به طور خودکار از داده های داخلی OSM ایجاد می شود
چکیده

کلید واژه ها:
نقشه های شبکه اشغال ; OpenStreetMap ; نقشه های داخلی ؛ موقعیت یابی داخلی ؛ فوق پهن باند
1. مقدمه
2. کارهای مرتبط
2.1. تثبیت موقعیت
2.2. نقشه های شبکه اشغال
3. روش شناسی
3.1. تولید خودکار OGM
3.1.1. داده های ورودی
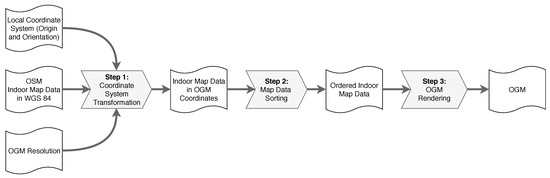
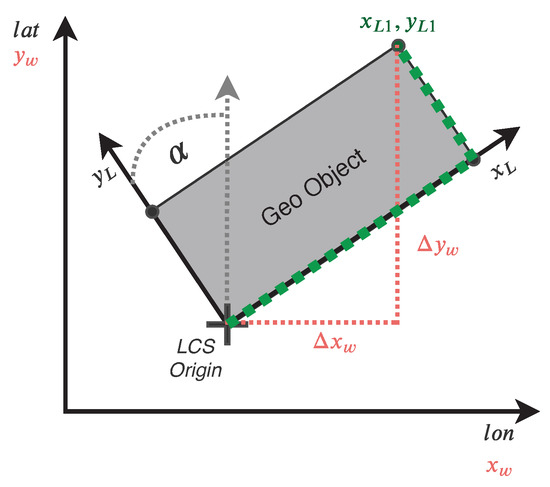
3.1.2. مرحله 1: تغییر سیستم مختصات
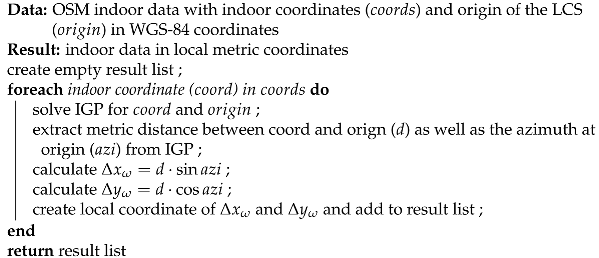
با استفاده از یک کتابخانه جغرافیایی [ 44 ، 45 ]، مختصات نقشه داخلی از فرمت WGS-84 به یک سیستم مختصات محلی متریک با حل مسئله معکوس ژئودزیکی (IGP)، که کوتاهترین مسیر را بین دو نقطه روی سطح تعیین میکند، منتقل شدند. از زمین. الگوریتم 1 زیر جریان داده را با جزئیات ارائه می کند:
| الگوریتم 1: الگوریتم محاسبه فواصل متریک محلی ( Δایکس�و Δ��) بین هر مختصات داخلی و مبدا LCS. |
 |
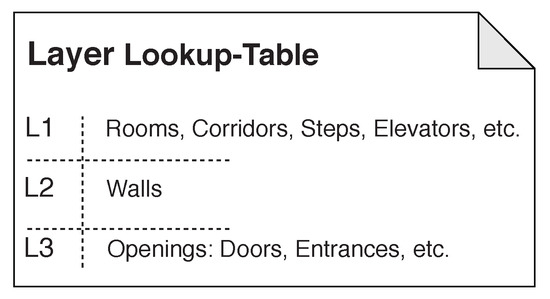
3.1.3. مرحله 2: مرتب سازی داده های نقشه
3.1.4. مرحله 3: رندر OGM
3.2. بهبود موقعیت
3.2.1. روش
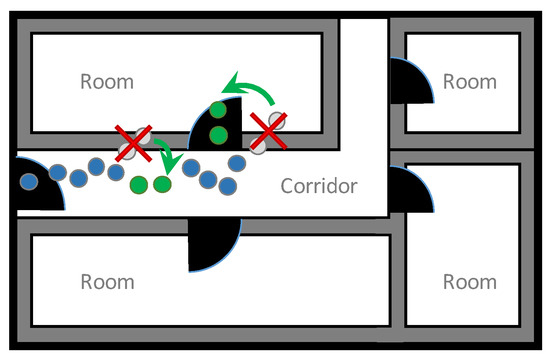
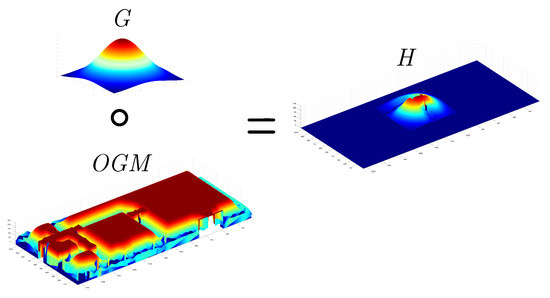
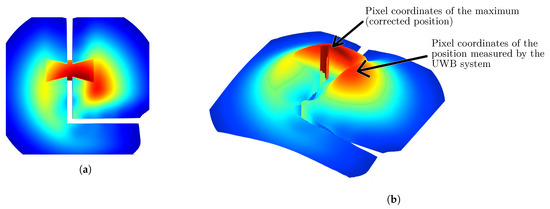
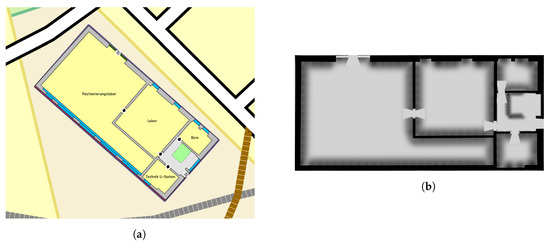
روش بهبود موقعیت با استفاده از مثال ساختمان دانشگاه شرح داده شده است. شکل 7 روش را به تصویر می کشد: برای به دست آوردن اطلاعات موقعیت یابی دقیق تر و حذف موقعیت های غیرقابل قبول (به عنوان مثال، موقعیت های درون دیوار)، حاصل ضرب هادامارد H را محاسبه کردیم ، یعنی ضرب عنصری یک ماسک گاوسی G (شکل و اندازه عبارتند از در زیر در بخش 3.2.2 توضیح داده شده است �جیمتولید شده از ساختمان این �جیمبه عنوان مشخص شد OGMدر معادله زیر
3.2.2. پارامترهای ماسک گاوسی
4. نتایج و بحث
4.1. نسل OGM
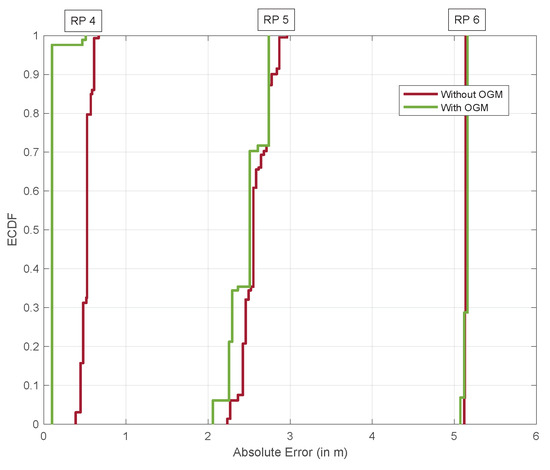
4.2. بهبود موقعیت
5. نتیجه گیری و کار آینده
5.1. نسل OGM
5.2. بهبود موقعیت
منابع
- کارون، سی. چمبرلند-ترمبلی، دی. لاپیر، سی. هادایا، ص. روشه، اس. Saada, M. موقعیت داخلی. در دایره المعارف GIS ; Shekhar, S., Xiong, H., Zhou, X., Eds. Springer: Cham, Switzerland, 2017; ص 1011-1019. [ Google Scholar ] [ CrossRef ]
- برنا، RF; گارسیا وازکز، جی پی. Galvan-Tejada، CE; مونوز-رودریگز، دی. بارگاس-روزالس، سی. Fangmeyer, J. تکامل فن آوری های موقعیت یابی داخلی: یک بررسی. J. Sens. 2017 , 2017 , 2630413. [ Google Scholar ] [ CrossRef ]
- پیوند، JAB; اسمیت، پی. ویول، ن. Wehrle, K. FootPath: پیمایش دقیق بر اساس نقشه در فضای داخلی با استفاده از تلفن های هوشمند. در مجموعه مقالات کنفرانس بین المللی 2011 در موقعیت یابی داخلی و ناوبری داخلی، گیماراس، پرتغال، 21 تا 23 سپتامبر 2011. صص 1-8. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- رمضان، ح. یوستیوان، ی. Kwon, J. اعمال محدودیت های حرکت در موقعیت یابی داخلی مبتنی بر BLE RSSI برای استخراج مسیرهای معنایی معتبر. Sensors 2020 , 20 , 527. [ Google Scholar ] [ CrossRef ] [ PubMed ][ نسخه سبز ]
- کوکینیس، ا. راسپوپولوس، م. کاناریس، ال. لیوتا، ا. Stavrou, S. موقعیت یابی داخلی بر اساس اثر انگشت با کمک نقشه. در مجموعه مقالات بیست و چهارمین سمپوزیوم بین المللی سالانه بین المللی IEEE در سال 2013 در مورد ارتباطات رادیویی شخصی، داخلی و سیار (PIMRC)، لندن، بریتانیا، 8 تا 11 سپتامبر 2013. ص 270-274. [ Google Scholar ] [ CrossRef ]
- منگ، جی. رن، م. وانگ، پی. ژانگ، جی. Mou, Y. بهبود دقت موقعیت یابی از طریق الگوریتم تطبیق نقشه برای کیلومترشمار بصری-اینرسی. Sensors 2020 , 20 , 552. [ Google Scholar ] [ CrossRef ] [ PubMed ][ نسخه سبز ]
- کنسرسیوم، OG CityGML | OGC. 2021. در دسترس آنلاین: https://www.ogc.org/standards/citygml (در 5 مارس 2021 قابل دسترسی است).
- کنسرسیوم، OG IndoorGML | OGC. 2021. در دسترس آنلاین: https://www.ogc.org/standards/indoorgml (در 5 مارس 2021 قابل دسترسی است).
- Poljansek، M. استانداردسازی مدل سازی اطلاعات ساختمان (BIM). 2018. در دسترس آنلاین: https://ec.europa.eu/jrc/en/publication/building-information-modelling-bim-standardization (در 5 مارس 2021 قابل دسترسی است).
- OSM-Community. برچسبگذاری ساده داخلی–ویکی OpenStreetMap. 2021. در دسترس آنلاین: https://wiki.openstreetmap.org/wiki/Simple_Indoor_Tagging (در 5 مارس 2021 قابل دسترسی است).
- لی، کی جی. کونتی، جی. کنستانتینیدیس، ای. زلاتانوا، اس. بامیدیس، ص. 10-OGC IndoorGML: یک رویکرد استاندارد برای نقشههای داخلی. در داده های جغرافیایی و اثرانگشتی برای ایجاد سیستم هایی برای موقعیت یابی داخلی و ناوبری داخلی/خارجی ؛ Conesa, J., Pérez-Navarro, A., Torres-Sospedra, J., Montoliu, R., Eds. سیستم های هوشمند داده محور، انتشارات دانشگاهی: کمبریج، MA، ایالات متحده آمریکا، 2019؛ ص 187-207. [ Google Scholar ] [ CrossRef ]
- Topf, J. OpenStreetMap Taginfo | برچسب ها | داخلی=اتاق در دسترس آنلاین: https://taginfo.openstreetmap.org/tags/indoor=room (در 5 مارس 2021 قابل دسترسی است).
- OSM-Community. Indoor Mapping–OpenStreetMap Wiki. 2020. در دسترس آنلاین: https://wiki.openstreetmap.org/wiki/Indoor_Mapping (در 5 مارس 2021 قابل دسترسی است).
- گریچن، تی. اشمیت، آر. ریشتر، جی. Heinkel، تولید نقشه شبکه اشغال U. از دادههای داخلی OSM برای برنامههای موقعیتیابی داخلی. در مجموعه مقالات ششمین کنفرانس بین المللی نظریه، کاربردها و مدیریت سیستم های اطلاعات جغرافیایی، آنلاین، 7 تا 9 مه 2020؛ جلد 1، ص 168–174. [ Google Scholar ] [ CrossRef ]
- لین، بی. قاسملوی، ز. لین، سی. تانگ، ایکس. لی، ی. Zhang, S. یک سیستم موقعیت یابی نور مرئی داخلی بر اساس ارتباطات دوربین نوری. IEEE Photonics Technol. Lett. 2017 ، 29 ، 579-582. [ Google Scholar ] [ CrossRef ]
- برگن، MH; شال، FS; کلوکاس، آر. چنگ، جی. هولزمن، JF به سوی اجرای یک سیستم موقعیتیابی داخلی نوری مبتنی بر زاویه جهانی. جلو. اپتوالکترون. 2018 ، 11 ، 116-127. [ Google Scholar ] [ CrossRef ]
- ورنر، ام. کسل، ام. Marouane, C. تعیین موقعیت داخلی با استفاده از دوربین تلفن هوشمند. در مجموعه مقالات کنفرانس بین المللی 2011 در موقعیت یابی داخلی و ناوبری داخلی، گیماراس، پرتغال، 21 تا 23 سپتامبر 2011. صص 1-6. [ Google Scholar ] [ CrossRef ]
- چابارکاپا، د. گروجیچ، آی. Pavlović، P. تجزیه و تحلیل مقایسه ای سیستم های موقعیت یابی داخلی با انرژی کم بلوتوث. در مجموعه مقالات دوازدهمین کنفرانس بین المللی 2015 در زمینه مخابرات در ماهواره، کابل و خدمات رادیویی مدرن (TELSIKS)، نیس، صربستان، 20-22 اکتبر 2015. صص 76-79. [ Google Scholar ] [ CrossRef ]
- کومینلی، ام. پاتراس، پ. گرینگولی، اف. مرده در هنگام ورود: مطالعه تجربی سیستم موقعیت یابی بلوتوث 5.1. در مجموعه مقالات سیزدهمین کارگاه بین المللی در مورد بسترهای آزمایشی شبکه بی سیم، ارزیابی تجربی و خصوصیات (WiNTECH)، لس کابوس، مکزیک، 25 اکتبر 2019؛ انجمن ماشینهای محاسباتی: لس کابوس، مکزیک، 2019؛ صص 13-20. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- سوریاوانشی، NB; ویسوواردان ردی، ک. Chandrika، قابلیت یافتن جهت VR در استاندارد بلوتوث 5.1. در ارتباطات همه جا حاضر و محاسبات شبکه ; Kumar, N., Venkatesha Prasad, R., Eds. یادداشت های سخنرانی موسسه علوم کامپیوتر، انفورماتیک اجتماعی و مهندسی مخابرات. Springer: Cham، سوئیس، 2019; صص 53-65. [ Google Scholar ] [ CrossRef ]
- لیو، اف. لیو، جی. یین، ی. وانگ، دبلیو. هو، دی. چن، پی. نیو، Q. بررسی تکنیک های موقعیت یابی داخلی مبتنی بر WiFi. IET Commun. 2020 ، 14 ، 1372-1383. [ Google Scholar ] [ CrossRef ]
- جنتنر، سی. اولمشنایدر، ام. کوئنر، آی. Dammann, A. WiFi-RTT Positioning Indoor. در مجموعه مقالات سمپوزیوم IEEE/ION 2020 Position, Location and Navigation Symposium (PLANS)، پورتلند، OR، ایالات متحده آمریکا، 20-23 آوریل 2020؛ ص 1029–1035. [ Google Scholar ] [ CrossRef ]
- اوزدنیزچی، بی. کوسکون، وی. خوب، K. NFC داخلی: یک سیستم ناوبری داخلی. Sensors 2015 , 15 , 7571–7595. [ Google Scholar ] [ CrossRef ] [ PubMed ][ نسخه سبز ]
- وو، ی. زو، HB; Du، QX; Tang, SM بررسی وضعیت تحقیقاتی سیستمهای محاسبه مردگان عابر پیاده بر اساس سنسورهای اینرسی. بین المللی جی. اتوم. محاسبه کنید. 2019 ، 16 ، 65-83. [ Google Scholar ] [ CrossRef ]
- Storch, M. Indoor-Navigation mit تلفن های هوشمند durch Auswertung des Erdmagnetfelds mit dem IndoorAtlas-Framework ; Wichmann Verlag: کارلسروهه، آلمان، 2019. [ Google Scholar ]
- سان، م. وانگ، ی. خو، اس. کائو، اچ. Si, M. موقعیت یابی داخلی ادغام موقعیت یابی PDR/ژئومغناطیسی بر اساس فیلتر ذرات ژنتیکی. Appl. علمی 2020 ، 10 ، 668. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- خو، اچ. وو، ام. لی، پی. زو، اف. وانگ، آر. الگوریتم موقعیت یابی داخلی RFID بر اساس رگرسیون بردار پشتیبان. Sensors 2018 , 18 , 1504. [ Google Scholar ] [ CrossRef ] [ PubMed ][ نسخه سبز ]
- سکو، اف. Jiménez، محلی سازی مشارکتی داخلی مبتنی بر تلفن هوشمند AR با فناوری RFID. Sensors 2018 , 18 , 266. [ Google Scholar ] [ CrossRef ] [ PubMed ][ نسخه سبز ]
- علاریفی، ع. السلمان، ع. الصالح، م. النافسه، ع. الحضرمی، س. العمار، م. الخلیفه، فناوری های موقعیت یابی داخلی باند فوق العاده HS: تجزیه و تحلیل و پیشرفت های اخیر. Sensors 2016 , 16 , 707. [ Google Scholar ] [ CrossRef ] [ PubMed ]
- دابوو، پ. پیترا، وی دی. پیراس، م. جبار، ع.ا. Kazim، SA موقعیت یابی داخلی با استفاده از فناوری های باند فوق عریض (UWB): دقت موقعیت یابی و عملکرد سنسورها. در مجموعه مقالات سمپوزیوم موقعیت، مکان و ناوبری IEEE/ION 2018 (PLANS)، مونتری، کالیفرنیا، ایالات متحده آمریکا، 23 تا 26 آوریل 2018؛ صص 175-184. [ Google Scholar ] [ CrossRef ]
- بوتلر، ال. اسپورک، ام. دیولد، ک. رومر، ک. یافتن جهت با UWB و BLE: یک مطالعه مقایسه ای. در مجموعه مقالات هفدهمین کنفرانس بین المللی IEEE 2020 در مورد سیستم های حسگر و Ad Hoc موبایل (MASS)، دهلی، هند، 10 تا 13 دسامبر 2020؛ ص 44-52. [ Google Scholar ] [ CrossRef ]
- مظهر، ف. خان، ام.جی. Sällberg، B. موقعیت یابی دقیق داخلی با استفاده از UWB: مروری بر روش ها، الگوریتم ها و پیاده سازی ها. سیم. پارس اشتراک. 2017 ، 97 ، 4467-4491. [ Google Scholar ] [ CrossRef ]
- موراوک، اچ. Elfes، A. نقشههای با وضوح بالا از سونار با زاویه باز. در مجموعه مقالات کنفرانس بین المللی IEEE 1985 در مجموعه مقالات روباتیک و اتوماسیون، سنت لوئیس، MO، ایالات متحده آمریکا، 25-28 مارس 1985; جلد 2، ص 116-121. [ Google Scholar ] [ CrossRef ]
- ماتیس، ال. الفس، الف. ادغام داده های سونار و محدوده استریو با استفاده از یک نمایش مبتنی بر شبکه. در مجموعه مقالات کنفرانس بین المللی IEEE در سال 1988 در مجموعه مقالات روباتیک و اتوماسیون، فیلادلفیا، PA، ایالات متحده، 24-29 آوریل 1988. جلد 2، ص 727–733. [ Google Scholar ] [ CrossRef ]
- Konolige، K. شبکه های اشغال بهبود یافته برای ساخت نقشه. Auton. ربات. 1997 ، 4 ، 351-367. [ Google Scholar ] [ CrossRef ]
- Thrun، S. شبکه های اشغال یادگیری با مدل های رو به جلو. در مجموعه مقالات کنفرانس بین المللی IEEE/RSJ 2001 در مورد ربات ها و سیستم های هوشمند، گسترش نقش اجتماعی رباتیک در هزاره بعدی (Cat. No.01CH37180)، Maui، HI، ایالات متحده، 29 اکتبر تا 3 نوامبر 2001. جلد 3، ص 1676–1681. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- کوردج، م. بهره برداری از داده های نقشه برای درک وسایل نقلیه هوشمند. دکتری پایان نامه، Universitéde Technologie de Compiègne، Compiègne، فرانسه، 2015. [ Google Scholar ]
- کوردج، م. موراس، جی. شرفاوی، وی. Bonnifait، P. همجوشی به کمک نقشه با استفاده از شبکههای شواهد برای ادراک موبایل در محیط شهری. توابع اعتقادی: نظریه و کاربردها . Denoeux, T., Masson, MH, Eds.; پیشرفت در هوشمند و نرم، محاسبات. Springer: برلین/هایزنبرگ، آلمان، 2012; صص 343-350. [ Google Scholar ]
- هررا، JCA؛ هینکنجان، ا. Plöger، PG; Maiero, J. محلیسازی داخلی قوی با استفاده از فیلتر فیوژن بهینه برای سنسورها و اطلاعات طرحبندی نقشه. در مجموعه مقالات کنفرانس بین المللی موقعیت یابی داخلی و ناوبری داخلی، مونبلیارد، فرانسه، 28 تا 31 اکتبر 2013. صص 1-8. [ Google Scholar ] [ CrossRef ]
- هررا، JCA؛ Plöger، PG; هینکنجان، ا. مایرو، جی. فلورس، ام. Ramos، A. موقعیت یابی داخلی عابر پیاده با استفاده از حسگر چندگانه تلفن هوشمند، چراغ های رادیویی، نقشه احتمال موقعیت های کاربر و نمایش طرح طبقه IndoorOSM. در مجموعه مقالات کنفرانس بین المللی 2014 در موقعیت یابی داخلی و ناوبری داخلی (IPIN)، بوسان، کره، 27 تا 30 اکتبر 2014. صص 636-645. [ Google Scholar ] [ CrossRef ]
- نایک، ال. بلومنتال، اس. هیبل، ن. بروینینککس، اچ. Prassler، E. برنامه افزودنی نگاشت معنایی برای OpenStreetMap که در ناوبری روبات داخلی کاربرد دارد. در مجموعه مقالات کنفرانس بین المللی رباتیک و اتوماسیون 2019 (ICRA)، مونترال، QC، کانادا، 20 تا 24 مه 2019؛ صص 3839–3845. [ Google Scholar ] [ CrossRef ]
- OSM-Community. JOSM. 2019. در دسترس آنلاین: https://josm.openstreetmap.de/ (دسترسی در 5 مارس 2021).
- OSM-Community. JOSM/Plugins/Measurement—OpenStreetMap Wiki. 2019. در دسترس آنلاین: https://wiki.openstreetmap.org/wiki/JOSM/Plugins/measurement (در 5 مارس 2021 قابل دسترسی است).
- کارنی، الگوریتم های CFF برای ژئودزیک. جی. جئود. 2013 ، 87 ، 43-55. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- کارنی، CFF GeographicLib. 2019. در دسترس آنلاین: https://geographiclib.sourceforge.io/ (دسترسی در 5 مارس 2021).
- Mraz, L. ملاحظات دقت برای ردیابی داخلی UWB در یک محیط صنعتی. 2019. در دسترس آنلاین: https://www.sewio.net/accuracy-considerations-for-uwb-indoor-tracking-in-an-industrial-environment/ (دسترسی در 5 مارس 2021).
- Langley، RB Dilution of Precision. GPS World 1999 ، 5 ، 52-59. [ Google Scholar ]



بدون دیدگاه