

چکیده
شبکه های جاده ای منبع اصلی مرگ و میر بسیاری از گونه ها هستند. دوزیستان که در حال انحطاط جهانی هستند، به دلیل الگوهای فعالیت و زیستگاه های ترجیحی خود، بیشترین قربانیان جانوران جاده ای هستند. بسیاری از روشهای مختلف در مدلسازی رابطه بین محیط و حوادث مرگبار، مانند رگرسیون لجستیک، به کار گرفته شدهاند. در اینجا، ما عملکرد پنج تکنیک رگرسیون را برای ارتباط فرکانس کشتار جادهای دوزیستان با متغیرهای محیطی مقایسه کردیم. برای این، ما سه جاده روستایی در شمال پرتغال را در جستجوی دوزیستان کشته شده در جاده بررسی کردیم. برای توضیح وجود کشتار جادهای، مجموعهای از متغیرهای محیطی مهم برای حضور دوزیستان و وقوع کشتار جادهای را انتخاب کردیم. ما عملکرد پنج تکنیک مدلسازی را مقایسه کردیم: (1) مدلهای خطی تعمیمیافته، (ب) مدلهای افزایشی تعمیمیافته، (ج) جنگل تصادفی، (IV) درختان رگرسیون تقویتشده، و (V) رگرسیون وزندار جغرافیایی. درختان رگرسیون تقویتشده و تکنیکهای رگرسیون وزندار جغرافیایی بهترین عملکرد را داشتند، با درصد انحراف به ترتیب بین 8/61 و 6/76 درصد و بین 3/55 و 7/66 درصد. علاوه بر این، رگرسیون وزندار جغرافیایی مزیت بزرگی را نسبت به سایر تکنیکها نشان داد، زیرا امکان نگاشت ضرایب پارامتر محلی و همچنین عملکرد مدل محلی (شبه-R) را فراهم میکند.2 ). نتایج نشان میدهد که رگرسیون وزندار جغرافیایی یک ابزار مفید برای مدلسازی کشتار جادهای و همچنین برای تجسم و ترسیم بهتر تغییرپذیری فضایی مدلها است.
کلید واژه ها:
مدل سازی طاقچه اکولوژیکی ; رگرسیون وزنی جغرافیایی ; رگرسیون لجستیک ; اکولوژی جاده ; رگرسیون فضایی ; برخورد حیات وحش با وسیله نقلیه
1. مقدمه
شبکه های جاده ای مناظر را در سطح جهانی تکه تکه می کنند [ 1 ، 2 ]. این زیرساخت های خطی با ترویج اثرات مانع، تغییرات در الگوهای توزیع یا مرگ و میر مستقیم بر حیات وحش تأثیر می گذارد [ 3 ، 4 ، 5 ]. دوزیستان به دلیل الگوهای فعالیت و زیستگاه های ترجیحی خود، بیشترین قربانیان را در جاده ها می بینند [ 6 ، 7 ، 8 ، 9 ]. فراتر از آن، دوزیستان خطرات مرتبط با جادهها را درک نمیکنند [ 10 ]، زیرا برخی از گونهها بیشتر از سایرین تحت تأثیر قرار میگیرند، مانند گونههایی که دارای واژن بالاتر هستند [ 6 ] یا با تمایل به فلج شدن هنگام مواجهه با وسیله نقلیه در حال حرکت [ 10].11 ]. در سطح جهانی، دوزیستان در حال کاهش بحرانی هستند [ 12 ] ، و تراکم جاده ها و گسترش ترافیک تسهیل کننده های اصلی هستند [ 13،14 ] . به عنوان مثال، در یک مطالعه در جنوب پرتغال، دوزیستان تا 70 درصد از مهرهداران کشته شده در جاده را تشکیل میدهند که در طول فصل بارانی یافت میشوند [ 15 ]. برای کاهش مرگومیر جادهای، درک عوامل مؤثر بر وقوع و مکان مکانی کشتارهای جادهای، که معمولاً در زمان و مکان دستهبندی میشوند و بهطور تصادفی رخ نمیدهند، بسیار مهم است [ 16 ]. سطح کشتار حیوانات در جاده ها به عوامل مختلفی بستگی دارد، از جمله ویژگی های جاده، شرایط آب و هوایی، پوشش گیاهی اطراف، نزدیکی به نقاط آبی، ترافیک، و ویژگی های اکولوژیکی گونه ها [ 7 ]., 9 , 16 , 17 , 18 , 19 , 20 , 21 , 22 ]. فراوانی گونهها نیز برای تعیین الگوهای کشتار جادهای بسیار مهم است [ 23 ، 24 ]، با این حال به دست آوردن این نوع دادهها بسیار دشوار است، یعنی در دوزیستان [ 7 ، 9 ].
مدلسازی قتلهای جادهای به دلیل تعداد بیش از حد صفرها و توزیع خوشهای رویدادهای مرگومیر، اغلب بسیار دشوار است [ 25 ]. بسیاری از روشهای مختلف برای مدلسازی رابطه بین ویژگیهای محیطی و تعداد کشتههای جادهای، مانند رگرسیون لجستیک و مدلسازی جایگاه اکولوژیکی استفاده شدهاند [ 9 ، 16 ، 22 ، 26 ، 27 ]. این تحلیلها اغلب شامل روشهای مدلسازی غیرمکانی مانند مدلهای خطی تعمیمیافته هستند (به عنوان مثال، [ 28 ]). با این حال، متغیرهای مهم اغلب دارای همبستگی فضایی هستند، و غیر ایستایی را در طول جاده نشان میدهند [ 29 ، 30 ]]. بنابراین، روشهای مدلسازی باید شامل روابط فضایی در منطقه مورد مطالعه باشد: در واقع، اغلب روشهای مرسوم مکان مکانی کشتارهای جادهای را شامل نمیشوند [ 29 ]. این روشهای غیر مکانی فرض میکنند که هر متغیر دارای یک ضریب ثابت برای کل منطقه جغرافیایی [ 31 ] است و به طور کلی فقط تخمینهای پارامتر متوسط و کلی را تولید میکند [ 32 ]. بنابراین، روشهای رگرسیون فضایی مانند رگرسیون وزندار جغرافیایی (GWR) جایگزین خوبی هستند. این تکنیک ممکن است مسائل مربوط به ناهمگونی فضایی و غیر ایستایی را در مدل سازی حل کند [ 29 ، 33 ]. GWR مزایای دیگری نسبت به سایر روش های مدل سازی غیر فضایی دارد [ 31 ، 32 ،34 ]: اجازه می دهد تا روابط مختلف بین کشته های جاده و متغیرهای محیطی در منطقه مورد مطالعه متفاوت باشد و تخمین پارامترهای محلی را علاوه بر برآوردهای جهانی ارائه می دهد [ 33 ]. این روش برای پیشبینی اثرات تصادفات انسانی [ 35 ، 36 ] موثر ثابت شده است و به طور فزایندهای در مطالعات اکولوژیکی [ 29 ، 34 ، 37 ، 38 ، 39 ، 40 ] استفاده میشود، اما در اکولوژی جادهها کم است.
در این مطالعه ما عملکرد پنج تکنیک رگرسیون را در مدلسازی کشتار جادهای دوزیستان مقایسه کردیم: (1) مدلهای خطی تعمیمیافته (GLM)، (ب) مدلهای افزایشی تعمیمیافته (GAM)، (iii) جنگل تصادفی (RF)، (IV) درختان رگرسیون تقویت شده (BRT)، و (v) رگرسیون وزنی جغرافیایی (GWR). به طور خاص، اهداف این مطالعه عبارت بودند از: (1) پرداختن به رابطه بین دوزیستان کشتار جاده و متغیرهای محیطی. (2) برای ارزیابی عملکرد پنج تکنیک با استفاده از مقادیر و باقیمانده های پیش بینی شده مدل، و (3) برای تجسم فضایی عملکرد مدل ها از نظر توزیع باقیمانده های مثبت و منفی. ما مراحل اصلی تحقیق پیشنهادی را در شکل 1 برجسته کردیم .
هنوز هیچ اجماع علمی در مورد اینکه چه روش مدلسازی میتواند از اقدامات حفاظتی بهتر پشتیبانی کند، یعنی اولویتبندی بخشهای جادهای برای ایجاد اقدامات کاهش یا سازماندهی نظارت فشردهتر بر روی آن بخشها وجود ندارد [ 26 ]. مطالعه ما یک تکنیک جایگزین برای مدلسازی قتلهای جادهای و همچنین برای کاوش دادهها در طول جادهها نشان میدهد. با توجه به دانش ما، این اولین مطالعه با هدف استفاده از تحلیل رگرسیون فضایی برای مدلسازی فراوانی کشتار حیوانات در جاده است.
2. مواد و روشها
2.1. داده های کشتار جاده ای
ما دادههایی را در مورد کشتار جادهای دوزیستان در شمال پرتغال (منطقه براگا، شکل 2 )، بین فوریه و ژوئن 2014 جمعآوری کردیم . این منطقه دارای تنوع بالایی از دوزیستان است [ 41 ، 42 ]. با این حال، این منطقه بسیار پرجمعیت با شبکه جاده ای بزرگ و متراکم است. جنگلهای اکالیپتوس و کاج، زمینهای کشاورزی و جنگلهای کوچک طبیعی/پهنبرگ بر چشمانداز غالب است. ما سه جاده دو طرفه کشور را انتخاب کردیم که 27 تا 40 کیلومتر طول و ترافیک متوسط داشتند. این نوع جاده های کشور میزبان بالاترین سطح مرگ و میر دوزیستان است [ 43 ].
ما شش بررسی با ماشین در هر جاده (در مجموع 18) در جستجوی دوزیستان کشته شده در جاده، با حداکثر سرعت 20 کیلومتر در ساعت انجام دادیم [ 7 ، 8 ، 44 ]. ما در اوایل صبح پس از شب های بارانی با دمای کمتر از 6-8 درجه سانتی گراد [ 7 ، 8 ، 45 ] نمونه برداری کردیم. ما موقعیت دوزیستان را با یک گیرنده GPS با دقت 2-3 متر ثبت کردیم، و پس از آن همه لاشه ها را از جاده خارج کردیم تا از جذب لاشخورها جلوگیری کنیم [ 46 ]. برای هر جاده، شاخص کیلومتر فراوانی (AKI) را محاسبه کردیم، که نسبت تعداد کل دوزیستان کشته شده در جاده مشاهده شده در یک جاده را به طول کل جاده بیان می کند [ 47 ].
2.2. داده های زیست محیطی
ما هر جاده بررسی شده را بر اساس داده های پراکندگی گونه ها به بخش های 250 متری تقسیم کردیم [ 45 ، 48 ، 49 ]. ما 11 متغیر محیطی را به هر بخش جاده اختصاص دادیم ( جدول 1 ). متغیرها با در نظر گرفتن ترجیحات زیستگاهی دوزیستان که وقوع کشتار جاده ای را تسهیل می کند انتخاب شدند [ 6 ، 7 ، 8 ، 9 ].
ما برای همبستگی آزمایش کردیم و متغیرهایی با همبستگی پیرسون بالاتر از 0.75 را حذف کردیم. هنگامی که جفت متغیرها همبستگی داشتند، ما متغیر را از نظر اکولوژیکی معنادارتر انتخاب کردیم [ 16 ]. ما پنج متغیر محیطی را انتخاب کردیم: فاصله تا مناطق شهری، فاصله تا جنگلهای پهن برگ، فاصله تا جنگلهای مخروطی، فاصله تا بدنههای آبی و شیب. متغیرهای محیطی با استفاده از QGIS 2.14.1 تهیه شدند.
2.3. تکنیک های مدل سازی
ما تعداد تلفات جاده ای دوزیستان را در هر بخش جاده شمارش کردیم تا پایگاه داده ای از فراوانی کشتار جاده ای ایجاد کنیم. ما یک اعتبارسنجی متقابل 10 برابری را با ایجاد ده مجموعه داده مختلف انجام دادیم تا از تعداد بیش از حد غیبت جلوگیری کنیم. در هر مجموعه داده، بخشها را با یا بدون حضور به ده گروه تقسیم کردیم: نه گروه برای آموزش مدل و یک گروه برای آزمایش آن استفاده شد. به این ترتیب، ده مجموعه داده مختلف با نه بخش آموزشی بدون کشتار جادهای و نه بخش با کشتار جادهای و دو گروه آزمایشی، یکی بدون کشتار جادهای و دیگری با کشتار جادهای به دست آوردیم. برای غیاب ها، ما به طور تصادفی بخش های مختلف جاده را بدون حضور برای هر مجموعه داده انتخاب کردیم [ 22]، تعداد بخش های غیبت را به همان تعداد حضور محدود می کند. این روش برای جلوگیری از مشکل تورم صفر مفید است [ 50 ]. ده مجموعه داده شامل بخشهای جادهای از هر سه جاده مورد بررسی بود. نتایج میانگین ده تکرار مدل بود.
ما از پنج تکنیک رگرسیون حضور و غیاب استفاده کردیم: مدل خطی تعمیم یافته (GLM)، مدل افزایشی تعمیم یافته (GAM)، جنگل تصادفی (RF)، درخت رگرسیون تقویت شده (BRT)، و رگرسیون وزنی جغرافیایی (GWR). چهار تکنیک اول آنالیزهای رگرسیون غیر فضایی هستند: GLM، تعمیم پارامتریک رگرسیون خطی معمولی که امکان توزیع خطا به غیر از توزیع نرمال را فراهم می کند [ 51 ]. GAM، یک روش انعطافپذیرتر و غیر پارامتری است که در آن پیشبینیکننده خطی به توابع صاف متغیرهای پیشبین بستگی دارد [ 51 ]. RF، یک روش یادگیری ماشین مجموعه ای برای طبقه بندی و رگرسیون که با ساخت درخت های تصمیم عمل می کند [ 52]؛ و BRT، یک یادگیری ماشینی است که میتواند توابع و تعاملات بین متغیرها را بدون ایجاد فرضیاتی در مورد شکل توابع برازش مدلسازی کند و از تأثیرات پرت و گنجاندن متغیرهای نامربوط مصون است [ 53 ]. هر دو GLM و GAM توسعههای مدلهای خطی هستند: GLM میتواند زمانی استفاده شود که ویژگیها از توزیعهای عادی پیروی نمیکنند. زمانی می توان از GAM استفاده کرد که روابط بین متغیرها خطی نباشد [ 51 ]. RF از چندین درخت تصمیم گیری منفرد تشکیل شده است: داده ها را چندین بار توسط بوت استرپ بر اساس یک آستانه تقسیم می کند و زیر مجموعه های مختلفی از مجموعه داده را ایجاد می کند [ 52 ]]. هر دو RF و BRT با بسیاری از درختان تصمیم مطابقت دارند تا دقت مدل را بهبود بخشند، اما در RF هر رخداد احتمال یکسانی برای انتخاب در نمونههای بعدی دارد در حالی که در BRT دادههای ورودی در درختهای بعدی وزن میشوند [ 52 ، 53 ]. بنابراین، BRT درختهای تصمیمگیری را با روشهای تقویت ترکیب میکند، با دادههایی که قبلاً ضعیف مدلسازی شده بودند، احتمال بیشتری برای انتخاب شدن در درخت جدید دارند [ 53 ]. تحلیلهای رگرسیون غیرمکانی فرض میکنند که هر پاسخ توضیحی در سراسر فضای جغرافیایی ثابت است (یعنی یک ضریب رگرسیون برای هر متغیر، برای کل منطقه مورد مطالعه وجود دارد)، که ایستایی فضایی را نشان میدهد [ 34 ]]. با این حال، ویژگی های محیطی ممکن است در فضای جغرافیایی متفاوت باشد (غیر ایستایی فضایی) که ممکن است به پیش بینی های مدل نادرست منجر شود [ 54 ]. این ناهمگونی فضایی اغلب ناشی از تعامل بین عوامل محیطی مختلف است [ 54 ]. از سوی دیگر، تکنیکهای تحلیل فضایی مانند GWR امکان تغییر فضایی روابط بین متغیرهای مستقل و وابسته را میدهد [ 33 ]. GWR یک فرم محلی مکانی از رگرسیون خطی است که امکان اندازه گیری و نقشه برداری از مدل های محلی را فراهم می کند. این روش با یک رگرسیون معمولی حداقل مربعات حول یک نقطه رگرسیون منطبق می شود، که در آن داده های نزدیک به این نقطه وزن بیشتری دارند [ 33 ، 55]. در همه روشها، ما از فرکانسهای کشتار جادهای به عنوان متغیر پاسخ و پنج متغیر محیطی به عنوان متغیرهای توضیحی، با توزیع گاوسی برای تحلیلهای غیرمکانی، در صورت امکان استفاده کردیم.
برای GAMها، ما حداکثر چهار spline (k = 4) را به منظور محدود کردن پیچیدگی نرمافزارهای توصیفکننده متغیرهای توضیحی و جلوگیری از مدلهای بیش از حد برازش تنظیم میکنیم. برای مدلهای BRT، پارامترها را بر اساس حجم نمونه کوچک تنظیم میکنیم: نرخ یادگیری (lr) 0.001، پیچیدگی درخت (tc) 3، و کسر کیسهای 0.5 [ 53 ]. نرخ یادگیری سهم هر درخت را در مدل رشد تعیین می کند، پیچیدگی درخت پیچیدگی برهمکنش متغیرها را تعیین می کند، و کسر کیسه تصادفی را کنترل می کند [ 53 ]. ما پارامترها را برای رسیدن به حداقل 1000 درخت برای هر مدل بهینه کردیم [ 53 , 56]. برای GWR، پهنای باند متفاوتی برای هر مکان هدف محاسبه می شود. یک پنجره متحرک با پهنای باند از پیش تعیین شده و یک تابع هسته وزنی فضایی امکان تخمین فاصله و ضرایب برای متغیرهای توضیحی هر بخش جاده را فراهم می کند. هر مشاهده در پنجره محلی بر اساس نزدیکی آن به مرکز آن پنجره وزن می شود [ 34 ]. ما پهنای باند را با استفاده از روش جستجوی بخش طلایی تطبیقی [ 33 ] بر اساس معیار اطلاعات Akaike (AICc، با تصحیح برای اندازههای نمونه محدود) تعیین کردیم. ما نوع مدل پواسون و نوع هسته فضایی Adaptive Bisquare را انتخاب کردیم که برای نقاط توزیع نابرابر مناسب است [ 57 ].
برای ارزیابی عملکرد مدل، از سه معیار اعتبار سنجی متقابل برای مقایسه برازش شده با مقادیر مشاهده شده [ 58 ] استفاده کردیم: شاخص توافق (شاخص توافق اصلاح شده ویلموت [ 59 ])، ناحیه زیر منحنی اپراتور گیرنده (AUC)، و درصد انحراف توضیح داده شده است. شاخص توافق یک تخمینگر خطا است که از 0 تا 1 متغیر است (1 به معنای یک پیشبینی کامل است) [ 59 ]. AUC توانایی هر مدل را برای تمایز صحیح بین حضور و غیاب قتلهای جادهای اندازهگیری میکند که بین 0 و 1 قرار دارد .]. درصد انحراف توضیح داده شده به صورت زیر محاسبه شد: (nتولل دهvمنآnجه – rهسمندتوآل دهvمنآnجه)/nتولل دهvمنآnجه. ما همچنین تخمین پارامترها و اهمیت مدل میانگین را در هر تکنیک مقایسه کردیم [ 29 ].
توزیع فضایی میانگین باقیمانده مدل برای دو تکنیک با بهترین عملکرد مدل ارزیابی و نمایش داده شد. ما باقیمانده ها را به عنوان تفاوت بین مقادیر مشاهده شده و برازش اندازه گیری کردیم (y–y^). ما باقیمانده ها را در مقیاس 1- تا 1 استاندارد کردیم تا مقادیر بین تکنیک ها را مقایسه کنیم. با توجه به نتایج GWR، ما شبه R2 محلی را نیز ترسیم کردیم ، که عملکرد مدل را در مکانهای خاص، و ضرایب پارامتر مهم متغیرهای محیطی را نشان میدهد [ 29 ]. به منظور ترسیم تنها تخمینهای معنیدار، از آستانه معنیداری 95 درصد برای پنهان کردن نقاطی استفاده کردیم که در آنها رابطه بین کشتارهای جادهای و متغیرهای محیطی معنیدار نبود (نقاط ضریب با p-value > 0.05 حذف شدند) [ 61 ].
تجزیه و تحلیل GWR در هر دو GWR4.0 و MGWR 2.2 [ 57 ] اجرا شد. تمام تکنیکهای مدلسازی غیرمکانی و تحلیلهای آماری دیگر با استفاده از R 3.4.4 [ 62 ] با استفاده از بستههای mgcv، randomForest و dismo انجام شد. نقشه ها با QGIS 2.14.1 نمایش داده شدند.
3. نتایج
ما در مجموع 343 دوزیست کشته شده در جاده را در سه جاده مورد مطالعه ثبت کردیم ( جدول 2 ). شاخص کیلومتر فراوانی (AKI) برای هر جاده و بررسی بین 0.00 و 2.52 دوزیستان در کیلومتر بود، با میانگین AKI برای همه بررسیها و جادهها 0.56 دوزیستان در کیلومتر.
با توجه به معیارهای انتخاب شده برای ارزیابی عملکرد مدل، دو تکنیک رگرسیون که عملکرد بدتری داشتند، مدل های خطی تعمیم یافته (GLM) و جنگل تصادفی (RF) و به دنبال آن مدل های افزایشی تعمیم یافته (GAM) ( جدول 3 ) بودند. درختان رگرسیون تقویتشده (BRT) و رگرسیون وزندار جغرافیایی (GWR) بهترین و نزدیک به یکدیگر را داشتند. مدل های GLM بین 21.0% و 27.0% انحراف را توضیح می دهند در حالی که GAM ها دارای انحراف توضیح داده شده بین 41.7% و 53.1% بودند. مدل های BRT به طور کلی عملکرد خوبی داشتند، با انحراف بین 61.8٪ و 76.6٪ توضیح داده شده است. مدلهای بهدستآمده با تکنیک GWR نیز عملکرد خوبی داشتند، با تجزیه و تحلیل بین 55.3 تا 66.7 درصد انحراف.
در GLMها، همه متغیرها بسیار معنادار بودند ( مواد تکمیلی، جدول S1 ). در GAMها، تقریباً همه متغیرها نیز بسیار معنادار بودند و منحنیهای پاسخ برای همه متغیرها کمی منفی بود ( مواد تکمیلی، جدول S2 و شکل S1 ). در RF و BRT، مهمترین متغیر شیب (در 9 مدل با هر دو روش) بود ( مواد تکمیلی، جداول S3 و S4 ). در مدلهای BRT منحنیهای پاسخ واضح نبودند، بنابراین نمیتوانیم بگوییم که آیا روابط مثبت یا منفی وجود دارد. در GWR، مهم ترین متغیر فاصله تا جنگل های سوزنی برگ بود (رابطه منفی معنی دار در 9 مدل متوسط) ( مواد تکمیلی، جدول S5).). همچنین در GWR تمامی متغیرها در بیش از یک بخش جاده دارای ضریب محلی معنیداری بودند.
با توجه به توزیع فضایی میانگین باقیماندهها، GWR الگوهای فضایی کلی بهتری را نسبت به BRT نشان داد (با پیشبینیهای صحیح بالاتر، (یعنی باقیماندهها بسیار نزدیک به صفر) ( شکل 3 ). BRT 46.3 درصد باقیماندههای منفی، 19.1 درصد پیشبینیهای درست و 37.0 درصد باقیماندههای مثبت؛ GWR 43.2 درصد باقیماندههای منفی، 26.5 درصد پیشبینیهای درست و 32.7 درصد باقیماندههای مثبت را ایجاد کرد.
عملکرد GWR در منطقه مورد مطالعه متفاوت است، همانطور که توسط نقشه شبه R2 محلی ، با مقدار متوسط 0.58 نشان داده شده است. ( شکل 4 ). جادههای R1 و R2 مقادیر شبه R2 ثابت بیشتری را در امتداد جادهها ارائه کردند ، در حالی که جاده R3 تنوع بیشتری بین بخشهای جاده داشت.
توزیع فضایی ضرایب معنیدار مدلهای GWR نشان داد که رابطه بین متغیرهای محیطی و تلفات جادهای نیز با مکان تغییر میکند. علیرغم اینکه فاصله تا مناطق شهری و فاصله تا جنگل های پهن برگ مدل متوسط تقریباً همیشه معنی دار نبود، در برخی از نقاط جاده های مورد مطالعه، این متغیرها به طور قابل توجهی بر مدل ها تأثیر گذاشتند. به عنوان مثال، فاصله متغیر تا مناطق شهری تأثیر مثبت معنیداری بر جادههای R1 و R2 و تأثیر منفی معنیداری بر جاده R3 داشت ( شکل 5 ). عکس این موضوع با فاصله متغیر تا جنگلهای پهن برگ اتفاق میافتد که نشاندهنده رابطه منفی معنیدار در جادههای R1 و R2 و رابطه مثبت معنیدار در جادههای R3 است ( شکل 5).).
4. بحث
نتایج ما دشواری مدلسازی دفعات کشتار جادهای را با تنوع کلی بین مدلها و روشهای مدلسازی برجسته میکند. تکنیکهای BRT و GWR عملکرد مدل و قدرت پیشبینی بهتری را در مقایسه با سایر تکنیکهای آزمایششده نشان دادند. هیچ تکنیک واحدی وجود ندارد که در همه شرایط بهترین عملکرد را داشته باشد [ 63]: هر روشی مزایای خود را دارد که در موارد خاص مفید است. در مورد مدل سازی تصادفات جاده ای، ما معتقدیم که BRT و GWR هر دو رویکردهای خوبی هستند و باید آزمایش شوند. هنگام انتخاب یک تکنیک رگرسیون غیر فضایی (مانند BRT)، کاوش و تجسم داده ها با استفاده از GWR بسیار سودمند است. BRT یک جدول مفید از تأثیر نسبی هر متغیر ارائه می دهد، اما نه برای ضرایب و اهمیت متغیرها. در عوض، این تکنیک یک منحنی پاسخ از هر متغیر محیطی را ارائه می دهد که در مورد ما تفسیر دشواری است. BRT در سه معیار عملکرد استفاده شده بهتر عمل کرد، با این حال GWR درصد بالاتری از پیشبینیهای صحیح را ارائه کرد (26.5٪ از باقیماندهها بسیار نزدیک به صفر). هر دو تکنیک درصد بیشتری از باقیمانده های منفی را در مقایسه با باقیمانده های مثبت ایجاد کردند.
همه تکنیکها نتایج مشابهی را بین هر کپی مدل، با تنوع عملکرد کوچک ارائه کردند (به عنوان مثال، انحراف BRT بین 61.8٪ و 76.6٪ یا شاخص توافق GLM بین 0.554 و 0.586) که میتواند به معنای قابل اعتماد بودن نتایج بهدستآمده باشد. با توجه به دو تکنیکی که ضعیفترین عملکرد را داشتند، RF مزایایی نسبت به GLM دارد، مانند سازگاری بالاتر برای تکامل با دادهها [ 64 ]]، اما فاقد چندین اطلاعات مهم است، زیرا معیاری برای انحراف ارائه نمی دهد. RF (و همچنین BRT) می تواند به عنوان مدل سازی یا ابزار اکتشافی برای جستجوی مهم ترین متغیرها استفاده شود. مشابه BRT، GAM یک منحنی پاسخ از هر متغیر موجود در مدل، و همچنین اهمیت هر متغیر را ارائه میکند، اما یک ضریب ارائه نمیدهد. بیشتر منحنیهای پاسخ مدلهای GAM ما کمی منفی اما تقریباً مسطح بودند، که مانع تجسم رابطه واضح بین کشتههای جادهای و متغیرهای محیطی میشود. علاوه بر این، مدلهای GAM اغلب بیش از حد برازش میشوند، به دلیل معرفی خطوط هموارسازی برای تناسب روابط غیر خطی [ 65 ، 66]. همه روشهای غیرمکانی که در اینجا آزمایش کردیم برای مدلسازی کشتارهای جادهای در مطالعات قبلی مفید بودهاند. به عنوان مثال، سیلو و همکاران. [ 22 ] تأثیر عوامل منظره را بر سطوح کشتار جاده ای دوزیستان در اسلوونی با استفاده از GLM به طور مؤثر مورد بررسی قرار داد. رایت و همکاران [ 67 ] از GAM برای توصیف روندهای فصلی در سطوح کشتار جاده جوجه تیغی استفاده کرد. گریلو و همکاران [ 68 ] نرخ کشتار جاده ای پستانداران و پرندگان در اروپا را با استفاده از RF پیش بینی کرد. و Ascensão و همکاران. [ 56 ] از BRT برای ارتباط سطح مرگ و میر جاده ای پستانداران با متغیرهای محیطی در برزیل استفاده کرد.
رویکردهای فضایی (GWR) دارای چندین مزیت نسبت به تحلیلهای غیرمکانی هستند: GWR به تجسم تنوع فضایی در منطقه مورد مطالعه کمک میکند، امکان ارزیابی دادههای خوشهبندی مکانی را فراهم میکند [ 34 ، 69 ]، و امکان نقشهبرداری ضرایب پارامتر محلی و همچنین محلی را فراهم میکند. تشخیص مدل (به دست آمده از طریق شبه R2 محلی ) برای تجسم و تفسیر غیر ایستایی فضایی. سایر مطالعات اکولوژیکی عملکرد بهتر GWR را در مقایسه با رگرسیون حداقل مربعات [ 34 ، 40 ]، GLM [ 39 ، 70 ] و GAM [ 39 ، 61 ، 66 ، 70 نشان دادند.]. ملین و همکاران [ 55 ] استفاده از وزنهای فضایی محلی را که در روشهای مدلسازی دیگر مانند درختان رگرسیون تقویتشده برای مدلسازی اکولوژیکی پیادهسازی میشوند، پیشنهاد کرد. در GWR، توانایی نگاشت ضرایب پارامتر امکان شناسایی مقادیر از دست رفته یا عوامل مرتبط با غیر ایستایی را فراهم می کند [ 54 ]. برخی از متغیرها ممکن است مهم باشند یا ممکن است در برخی مناطق تأثیر خاصی داشته باشند و در برخی دیگر نه. به عنوان مثال، در مدلهای ما متوجه شدیم که فاصله متغیر تا مناطق شهری دارای ضرایب محلی مثبت در جادههای R1 و R2 (مناطق شهریتر، نزدیکتر به ساحل) و ضرایب منفی در جاده R3 (منطقه سبزتر، نزدیک به یک کشور ملی است. پارک؛ شکل 5 ). فاصله متغیر تا جنگل های پهن برگ اثر معکوس را نشان داد ( شکل 5). این نتیجه با توجه به تأثیر شهرنشینی چشمانداز در میزان کشتار جادهها جالب است [ 24 ]: در مناطق شهریتر، دوزیستان ممکن است بیشتر به جنگلهای طبیعی نزدیکتر در جادهها کشته شوند، در حالی که در مناطق طبیعیتر، دوزیستان ممکن است به جادهها برسند. – بیشتر در نزدیکی مناطق شهری کشته می شوند. GWR همچنین برای کاوش و تجسم داده ها مفید است [ 34 ]. ما متوجه شدیم که جاده R2 ضعیفترین عملکرد توضیحی را دارد (برخی مکانها با شبه R 2 محلی کم ؛ شکل 3) بلکه برخی از نقاط با بالاترین عملکرد. این ممکن است برخی از تأثیرات مغرضانه اساسی را در این جاده آشکار کند یا اینکه متغیر توضیحی مهمی وجود ندارد. علاوه بر این، با استفاده از اطلاعات ارائه شده توسط توزیع باقیمانده ها و مقادیر شبه R 2 محلی ، ممکن است بتوانیم مناطقی را که نتایج قابل اعتمادی ارائه نمی دهند شناسایی کرده و دلایل را بیشتر بررسی کنیم.
شمال پرتغال یک منطقه پراکنده، شهری و پرجمعیت است [ 71 ]. در نتیجه، ما میانگین تعداد 0.56 دوزیست کشته شده در جاده را در هر کیلومتر ثبت کردیم. با توجه به اینکه در پرتغال جنوبی میانگین فراوانی دوزیستان کشته شده در جاده حدود 4.8 ایندی/کیلومتر است [ 72 ] اما با سطوح مشابهی از کشتارهای جاده ای که در مطالعه قبلی در شمال پرتغال یافت شده بود، مطابقت دارد (Matos et al. [ 9 ]: تقریباً 0.45 ind/km برای بررسی هایی که بین فوریه و مه 2011 انجام می شود). مطالعه دیگری در جنوب پرتغال ارزش بسیار متفاوتی از دوزیستان کشته شده در جاده در هر کیلومتر را ثبت کرد (Mestre et al. [ 21 )]: 0.14 ایند در کیلومتر)؛ با این حال، این مطالعه بیش از دو سال انجام شد و تقریباً تمام تغییرات فصلی (بین سپتامبر و مه) را پوشش داد. تراکم دوزیستان کشته شده در جاده که ما در مطالعه خود در شمال پرتغال به دست آوردیم مشابه همان چیزی است که برای منطقه سالامانکا، اسپانیا (0.23 ind/km) توصیف شد، که در بهار نیز اتفاق افتاد [ 7 ]. جمعیت دوزیستان در نزدیکی جاده های مورد مطالعه ما اندازه گیری نشده است. بنابراین، ما نمی دانیم که شدت کشتار جاده ای واقعاً چگونه بر آن جمعیت تأثیر می گذارد. این جمعیتها ممکن است در نزدیکی جادهها با شهرنشینی زیاد خاموش شده باشند، و در طولانیمدت از میزان بالای کشتههای جادهای رنج میبرند [ 24 ]. اگرچه تعداد حیوانات کشته شده در جاده ها در جاده ها، فصول و روزها بسیار متغیر است [ 26 ، 73 ]]، تعداد کم دوزیستان کشته شده در جاده در این مطالعه تا حدودی هشدار دهنده است.
5. نتیجه گیری ها
به طور خلاصه، نتایج ما نشان میدهد که GWR یک ابزار مفید برای مدلسازی قتلهای جادهای، و همچنین برای کاوش، تجسم و نقشهبرداری بهتر تغییرپذیری فضایی مدلها است. توصیه میکنیم از GWR برای مدلسازی رویدادهای کشتار جادهای استفاده کنید، زیرا عوامل محرک آنها در فضا ثابت نیستند. گسترش این مقایسه بین تکنیکها برای مدلسازی کشتار جادهای دوزیستان، یعنی شامل مجموعه داده بزرگتر و شامل سایر متغیرهای مربوط به ترافیک و فراوانی گونهها، مطلوب است. در نهایت، مطالعه ما به درک بهتر تأثیر متغیرهای محیطی غیر ثابت در وقوع کشتارهای جادهای کمک میکند، که ممکن است به اعمال بهتر اقدامات کاهشی کمک کند.
منابع
- Goosem، M. اثرات تکه تکه شدن ناشی از جاده ها از طریق جنگل های بارانی. Curr. علمی 2007 ، 93 ، 1587-1595. [ Google Scholar ]
- ایبیش، پی. هافمن، ام تی؛ کرفت، اس. پیر، جی. کتی، وی. بیبر-فرودنبرگر، ال. دلاسالا، دی. Vale, MM; هابسون، روابط عمومی؛ سلوا، ن. نقشه جهانی مناطق بدون جاده و وضعیت حفاظتی آنها. Science 2016 ، 354 ، 1423-1427. [ Google Scholar ] [ CrossRef ]
- Fahrig, L. اثرات تکه تکه شدن زیستگاه بر تنوع زیستی. آنو. کشیش اکول. تکامل. سیستم 2003 ، 34 ، 487-515. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- Seiler، A. The Toll of the Automobile: Wildlife and Roads in Sued. دکتری پایان نامه، دانشگاه علوم کشاورزی سوئد، اوپسالا، آلنارپ، اسکارا، سوئد، 2003. [ Google Scholar ]
- اورز، RM; دیدهام، RK عوامل مخدوش کننده در تشخیص پاسخ گونه ها به تکه تکه شدن زیستگاه. Biol. Rev. 2006 , 81 , 117-142. [ Google Scholar ] [ CrossRef ] [ PubMed ]
- Carr، LW; Fahrig, L. اثر ترافیک جادهای بر دو گونه دوزیست با واژن متفاوت. حفظ کنید. Biol. 2001 ، 15 ، 1071-1078. [ Google Scholar ] [ CrossRef ]
- سطوح مرگ و میر سیلو، N. دوزیستان در جاده های کشور اسپانیا: تجزیه و تحلیل توصیفی و فضایی. آمفیب. خزنده. 2008 ، 29 ، 337-347. [ Google Scholar ] [ CrossRef ]
- گاریگا، ن. سانتوس، ایکس. مونتوری، آ. ریشتر-بویکس، ای. فرانچ، ام. Llorente، GA آیا مناطق حفاظت شده واقعا محافظت می شوند؟ تاثیر ترافیک جاده ای بر جانوران مهره داران تنوع زیستی حفظ کنید. 2012 ، 21 ، 2761-2774. [ Google Scholar ] [ CrossRef ]
- ماتوس، سی. سیلو، ن. Argana، E. تجزیه و تحلیل فضایی سطح مرگ و میر جاده های دوزیستان در جاده های کشور شمال پرتغال. آمفیب. خزنده. 2012 ، 33 ، 469-483. [ Google Scholar ] [ CrossRef ]
- گیبس، جی پی؛ شرایور، WG آیا مرگ و میر جاده ای می تواند جمعیت دوزیستان پرورش دهنده استخر را محدود کند؟ Wetl. Ecol. مدیریت 2005 ، 13 ، 281-289. [ Google Scholar ] [ CrossRef ]
- لیما، اس ال. بلک ول، بی اف؛ DeVault، TL; Fernández-Juricic، E. واکنش های حیوانات به وسایل نقلیه روبرو: یک بررسی مفهومی. Biol. Rev. 2015 , 90 , 60-76. [ Google Scholar ] [ CrossRef ] [ PubMed ][ نسخه سبز ]
- آلفورد، RA; ریچاردز، اس جی کاهش دوزیستان جهانی: مشکلی در اکولوژی کاربردی. آنو. کشیش اکول. سیستم 1999 ، 30 ، 133-165. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- استوارت، SN; Chanson، JS; کاکس، NA; جوان، BE; رودریگز، اس. فیشمن، دی ال. والر، RW وضعیت و روند کاهش و انقراض دوزیستان در سراسر جهان. Science 2004 ، 306 ، 1783-1786. [ Google Scholar ] [ CrossRef ] [ PubMed ][ نسخه سبز ]
- Meijer، JR; Huijbregts، MAJ; شوتن، KCGJ; Schipper، AM الگوهای جهانی زیرساخت های جاده ای فعلی و آینده. محیط زیست Res. Lett. 2018 , 13 , 064006. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- کاروالیو، اف. میرا، A. مقایسه کشتار سالانه جاده مهرهداران در دو دوره زمانی، به فاصله 9 سال: مطالعه موردی در زمینهای کشاورزی مدیترانه. یورو جی. وایلدل. Res. 2011 ، 57 ، 157-174. [ Google Scholar ] [ CrossRef ]
- کلونجر، AP; کروشچ، بی. گانسون، KE الگوهای فضایی و عوامل مؤثر بر تجمعات کشتار جاده ای جانوران کوچک دامداران. تنوع زیستی حفظ کنید. 2003 ، 109 ، 15-26. [ Google Scholar ]
- سیلر، ا. هلدین، جی. سیلر، سی. مرگ و میر جاده ای در پستانداران سوئدی: نتایج پرسشنامه رانندگان. Wildl. Biol. 2004 ، 10 ، 183-191. [ Google Scholar ] [ CrossRef ]
- Seiler, A. پیش بینی مکان های برخورد گوزن و وسیله نقلیه در سوئد. J. Appl. Ecol. 2005 ، 2 ، 371-382. [ Google Scholar ] [ CrossRef ]
- کوئلیو، IP; Teixeira، FZ; کلمبو، پی. کوئلیو، AV; جاده کیندل، A. Anuran، همسایه یک منطقه حفاظت شده حومه شهری در جنگل اقیانوس اطلس، برزیل را می کشد. جی. محیط زیست. مدیریت 2012 ، 112 ، 17-26. [ Google Scholar ] [ CrossRef ]
- بنت، VJ اثرات تراکم و الگوی جاده بر حفاظت از گونه ها و تنوع زیستی. Curr. Landsc. Ecol. Rep. 2017 , 2 , 1-11. [ Google Scholar ] [ CrossRef ]
- Mestre، F. لوپس، اچ. پینتو، تی. سوزا، ال جی؛ میرا، ع. سانتوس، اس ام بد طلوع ماه؟ تأثیر چرخه ماه در کشتار جادهای دوزیستان یورو جی. وایلدل. Res. 2019 ، 65 ، 58. [ Google Scholar ] [ CrossRef ]
- سیلو، ن. پوبولجساج، ک. لسنیک، ا. سالمون، الف. تأثیر عوامل منظر بر کشتار جادهای دوزیستان در سطح ملی. تنوع 2019 ، 11 ، 13. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- D’Amico، M. رومان، جی. د لس ریس، ال. Revilla، E. الگوهای کشتار جاده ای مهره داران در زیستگاه های مدیترانه: چه کسی، چه زمانی و کجا. Biol. حفظ کنید. 2015 ، 191 ، 234-242. [ Google Scholar ] [ CrossRef ]
- آسسنسائو، اف. کیندل، ا. Zimmermann Teixeira، F. بارینتوس، آر. D’Amico، M. Borda-de-Agua، L.; Pereira، HM مراقب باشید که فقدان سوابق مرگ و میر حیات وحش می تواند تأثیر جدی زیرساخت های خطی را پنهان کند. گلوب. Ecol. حفظ کنید. 2019 ، 19 ، e00661. [ Google Scholar ] [ CrossRef ]
- حسن، MT; اسندون، جی. Ma، R. مدلسازی دادههای کشتار جادهای دوجملهای دوجملهای در نمونهبرداری از راه دور در حالی که به طور همزمان تورم صفر، همبستگی سریال و اندازههای مختلف خوشه را محاسبه میکند. محیط زیست Ecol. آمار 2017 ، 24 ، 201-217. [ Google Scholar ] [ CrossRef ]
- لین، YP; آنتونی، جی. لین، WC; Lien, WY; Petway, JR; لین، TE شناسایی فضایی و زمانی احتمال کشتار جاده ای و برنامه ریزی سیستماتیک حفاظت. Landsc. Ecol. 2019 ، 34 ، 717–735. [ Google Scholar ] [ CrossRef ]
- پتروان، SO; Vale، CG; Sillero, N. استفاده از علم شهروندی در بررسی های جاده ای برای نظارت بر دوزیستان در مقیاس بزرگ: آیا داده های مغرضانه نماینده توزیع گونه ها هستند؟ تنوع زیستی حفظ کنید. 2020 ، 29 ، 1767-1781. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- گریلو، سی. آسسنسائو، اف. سانتوس-ریس، ام. Bissonette، JA آیا مناظر بهم پیوسته باعث افزایش مرگ و میر ناشی از جاده می شود؟ یورو جی. وایلدل. Res. 2011 ، 57 ، 707-716. [ Google Scholar ] [ CrossRef ]
- شیهان، KR; غریبه، نماینده مجلس؛ ولز، SA مزایای رگرسیون وزندار جغرافیایی برای مدلسازی بستر اعماق دریا در دو جریان اکوسیستم بزرگ یلوستون. اویرون. مدل. ارزیابی کنید. 2013 ، 18 ، 209-219. [ Google Scholar ] [ CrossRef ]
- گراهام، اچ. الیت، جی. هیجمانس، ج. گیسان، ع. تاونسند پترسون، ای. لویزل، کارشناسی; کارگروه توزیع گونه های پیش بینی NCEAS. تأثیر خطاهای مکانی در دادههای وقوع گونهها که در مدلهای توزیع استفاده میشوند. J. Appl. Ecol. 2008 ، 45 ، 239-247. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- علی، ک. کبک، دی. Olfert، MR آیا رگرسیون های وزنی جغرافیایی می توانند تحلیل و سیاست گذاری منطقه ای را بهبود بخشند؟ بین المللی Reg. علمی Rev. 2007 , 30 , 300-329. [ Google Scholar ] [ CrossRef ]
- گائو، جی. لی، اس. تشخیص روابط فضایی غیر ثابت و وابسته به مقیاس بین پراکندگی منظر شهری و عوامل مرتبط با استفاده از رگرسیون وزندار جغرافیایی. Appl. Geogr. 2011 ، 31 ، 292-302. [ Google Scholar ] [ CrossRef ]
- Fotheringham، AS; براندون، سی. چارلتون، ام. رگرسیون وزندار جغرافیایی: تحلیل روابط متغیر فضایی . John Wiley & Sons Inc.: Chichester، UK، 2002. [ Google Scholar ]
- کالا، AK; تیواری، سی. میکلر، آر. اتکینسون، SF مقایسه رگرسیون حداقل مربعات و مدلسازی رگرسیون وزندار جغرافیایی خطر ویروس نیل غربی بر اساس پارامترهای محیطی. PeerJ 2017 ، 5 ، e3070. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- اردوغان، اس. تحلیل فضایی اکتشافی آمار تصادفات رانندگی و مرگ و میر جاده ای در استان های ترکیه. J. Saf. Res. 2009 ، 40 ، 341-351. [ Google Scholar ] [ CrossRef ] [ PubMed ]
- ژنگ، ال. رابینسون، آر.ام. خطک، ع. وانگ، ایکس. همه تصادفات برابر نیستند: استفاده از مدلهای رگرسیون وزندار جغرافیایی برای ارزیابی و پیشبینی اثرات تصادف. در مجموعه مقالات سومین کنفرانس بین المللی ایمنی و شبیه سازی جاده، ایندیاناپولیس، ایالت متحده آمریکا، 14 تا 16 سپتامبر 2011. [ Google Scholar ]
- آستین، ام. مدلهای توزیع گونهها و نظریه اکولوژیکی: ارزیابی انتقادی و برخی رویکردهای جدید ممکن. Ecol. مدل. 2007 ، 200 ، 1-19. [ Google Scholar ] [ CrossRef ]
- کوپفر، جی. Farris، CA ترکیب غیر ایستایی فضایی ضرایب رگرسیون در مدلهای پوشش گیاهی پیشبینیکننده. Landsc. Ecol. 2007 ، 22 ، 837-852. [ Google Scholar ] [ CrossRef ]
- Nogués-Bravo، D. مقایسه روشهای رگرسیون برای پیشبینی الگوهای غنای گونهای. Web Ecol. 2009 ، 9 ، 58-67. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- بله، X. یو، ایکس. وانگ، تی. بررسی اثرات محیطی غیر ساکن فضایی بر روی توزیع پانداهای غول پیکر در کوه های Qinling، چین. گلوب. Ecol. حفظ کنید. 2020 ، 21 ، e00894. [ Google Scholar ] [ CrossRef ]
- لوریرو، آ. فراند، ن. Carretero، MA; Paulo, O. Atlas dos Anfíbios e Répteis de Portugal , 1st ed.; Esfera do Caos: لیسبون، پرتغال، 2010. [ Google Scholar ]
- ریبیرو، آر. تورس، جی. گومز، وی. Carretero، MA; سیلو، ن. Llorente، GA غنای نامشخص در نزدیکی خانه: سوابق جدید هرپتولوژی در منطقه شهری پورتو (NW پرتغال). بول. د لا آسوک. هرپتول. به ویژه 2010 ، 21 ، 27-30. [ Google Scholar ]
- Orlowski، G. توزیع فضایی و الگوی فصلی در مرگ و میر جاده ای وزغ معمولی Bufo bufo در یک چشم انداز کشاورزی در جنوب غربی لهستان. آمفیب. خزنده. 2007 ، 28 ، 25-31. [ Google Scholar ] [ CrossRef ]
- گلیستا، دی جی; DeVault، TL; مرگ و میر جاده ای مهره داران DeWoody، JA عمدتاً روی دوزیستان تأثیر می گذارد. هرپتول. حفظ کنید. Biol. 2008 ، 3 ، 77-87. [ Google Scholar ]
- سانتوس، ایکس. یورنته، GA؛ مونتوری، آ. Carretero، MA; فرانچ، ام. گاریگا، ن. Richter-Boix، A. ارزیابی عوامل موثر بر مرگ و میر دوزیستان در جاده ها: مورد وزغ معمولی Bufo bufo ، در نزدیکی یک مکان پرورش. انیمیشن. تنوع زیستی حفظ کنید. 2007 ، 30 ، 97-104. [ Google Scholar ]
- سانتوس، اس ام. کاروالیو، اف. میرا، الف. مردگان چقدر در جاده زنده می مانند؟ احتمال ماندگاری لاشه و پیامدهای آن برای بررسیهای نظارت بر کشتار جادهای PLoS ONE 2011 ، 6 ، e25383. [ Google Scholar ] [ CrossRef ] [ PubMed ][ نسخه سبز ]
- پریتونی، دی جی؛ تاتونی، سی. بیسی، ف. ماسرونی، ای. داکونتو، دی. لوناردی، س. گریمود، آی. مارتینولی، آ. توسی، جی. ارزیابی شاخص های کیلومتری فراوانی منبع باز. Ecol. به اطلاع رساندن. 2012 ، 7 ، 35-40. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- سملیچ، RD; معیارهای بیولوژیکی Bodie, JR برای مناطق حائل در اطراف تالاب ها و زیستگاه های ساحلی برای دوزیستان و خزندگان. حفظ کنید. Biol. 2003 ، 17 ، 1219-1228. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- اسمیت، AM; گرین، پراکندگی DM و پارادایم فراجمعیت در بوم شناسی و حفاظت از دوزیستان: آیا همه جمعیت های دوزیستان فراجمعیت هستند؟ اکوگرافی 2005 ، 28 ، 110-128. [ Google Scholar ] [ CrossRef ]
- گیسان، ع. Zimmermann، NE مدلهای توزیع زیستگاه پیشبینیکننده در اکولوژی. Ecol. مدل. 2000 ، 135 ، 147-186. [ Google Scholar ] [ CrossRef ]
- فیلد، ا. مایلز، جی. Field, Z. کشف آمار با استفاده از R ; انتشارات Sage Ltd.: لندن، انگلستان، 2012. [ Google Scholar ]
- بریمن، ال. جنگل تصادفی. ماخ فرا گرفتن. 1999 ، 45 ، 1-35. [ Google Scholar ]
- الیت، جی. Leathwick، JR; Hastie, T. راهنمای کار برای درختان رگرسیون تقویت شده. J. Anim. Ecol. 2008 ، 77 ، 802-813. [ Google Scholar ] [ CrossRef ]
- میلر، JA گونه های توزیع خود همبستگی فضایی و غیر ایستایی را مدل می کنند. Prog. فیزیک Geogr. 2012 , 36 , 681692. [ Google Scholar ] [ CrossRef ]
- ملین، سی. منگرسن، ک. برادشاو، CJA; Caley, MJ تعمیم استفاده از وزن های جغرافیایی در مدل سازی تنوع زیستی. گلوب. Ecol. Biogeogr. 2014 ، 23 ، 1314-1323. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- آسسنسائو، اف. دسبیز، الج. Medici، EP; باگر، الف. الگوهای فضایی مرگ و میر جاده ای پستانداران متوسط تا بزرگ در ماتو گروسو دو سول، برزیل. Wildl. Res. 2017 ، 44 ، 135-146. [ Google Scholar ] [ CrossRef ]
- اوشان، TM; لی، ز. کانگ، دبلیو. ولف، ال جی. Fotheringham، AS mgwr: پیادهسازی پایتون از رگرسیون وزندار جغرافیایی چند مقیاسی برای بررسی ناهمگونی و مقیاس فضایی فرآیند. ISPRS Int. J. Geo-Inf. 2019 ، 8 ، 269. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- الیت، جی. گراهام، CH; اندرسون، روابط عمومی؛ دودیک، م. فریر، اس. گیسان، ع. JHijmans، R. Huettmann، F. آرلیثویک، جی. لمان، ا. و همکاران روشهای جدید پیشبینی توزیع گونهها را از دادههای وقوع بهبود میبخشند. اکوگرافی 2006 ، 29 ، 129-151. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- ویلموت، سی جی; Robeson, SM; Matsuura، K. یک شاخص تصفیه شده از عملکرد مدل. بین المللی جی.کلیماتول. 2011 ، 32 ، 2088-2094. [ Google Scholar ] [ CrossRef ]
- Zou، KH; اومالی، ای جی؛ Mauri، L. تجزیه و تحلیل مشخصه عامل گیرنده برای ارزیابی تست های تشخیصی و مدل های پیش بینی. تیراژ 2007 ، 115 ، 654-657. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- Windle، MJS; رز، GA; دیویلر، آر. فورتین، ام.-جی. بررسی عدم ایستایی فضایی دادههای بررسی شیلات با استفاده از رگرسیون وزندار جغرافیایی (GWR): نمونهای از شمال غربی اقیانوس اطلس. ICES J. Mar. Sci. 2010 ، 67 ، 145-154. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- تیم اصلی توسعه. R: زبان و محیطی برای محاسبات آماری . بنیاد R برای محاسبات آماری: وین، اتریش، 2018. [ Google Scholar ]
- کیائو، اچ. سوبرون، جی. پترسون، AT بدون گلوله نقرهای در مدلسازی همبستگی بومشناختی: بینشهایی از آزمایش در میان بسیاری از الگوریتمهای بالقوه برای تخمین جایگاه. روش ها Ecol. تکامل. 2015 ، 6 ، 1126-1136. [ Google Scholar ] [ CrossRef ]
- لوپاتین، جی. دولوس، ک. هرناندز، HJ; گالگیلو، ام. Fassnacht، FE مقایسه مدل های خطی تعمیم یافته و جنگل تصادفی برای مدل سازی غنای گونه های گیاهی آوندی با استفاده از داده های LiDAR در یک جنگل طبیعی در مرکز شیلی. سنسور از راه دور محیط. 2016 ، 173 ، 200-210. [ Google Scholar ] [ CrossRef ]
- گو، سی. وهبا، جی. به حداقل رساندن امتیازات GCV/GML با پارامترهای هموارسازی چندگانه از طریق روش نیوتن. SIAM J. Sci. آمار محاسبه کنید. 1991 ، 12 ، 383-398. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- لی، ام. ژانگ، سی. خو، بی. ژو، ی. Ren، Y. مقایسه GAM و GWR در مدلسازی توزیع فضایی میگوی آخوندکی ژاپنی (Oratosquilla oratoria) در آبهای ساحلی. استوار. ساحل. Shelf Sci. 2020 , 244 , 106928. [ Google Scholar ] [ CrossRef ]
- رایت، PGR؛ کومبر، FG; بلامی، سی سی; پرکینز، SE; Mathews, F. پیش بینی خطرات مرگ و میر جوجه تیغی در جاده های بریتانیا با استفاده از مدل سازی مناسب زیستگاه. PeerJ 2020 ، 7 ، e8154. [ Google Scholar ] [ CrossRef ] [ PubMed ][ نسخه سبز ]
- گریلو، سی. کورولوا، ای. آندراشیک، آر. بیل، ام. González-Suárez, M. خطر کشتار جاده ای و آسیب پذیری جمعیت در پرندگان و پستانداران اروپایی. جلو. Ecol. محیط زیست 2020 ، 18 ، 323-328. [ Google Scholar ] [ CrossRef ]
- Goovaerts، P. تجزیه و تحلیل زمین آماری داده های بهداشتی: وضعیت از هنر و دیدگاه ها. در GeoENV VI—Geostatistics for Environmental Applications (زمین شناسی کمی و زمین آمار) ; Soares, A., Pereira, MJ, Dimitrakopoulos, R., Eds. Springer: Dordrecht، هلند، 2008; جلد 15. [ Google Scholar ]
- آزبورن، PE; فودی، جنرال موتورز; Suárez-Seoane، S. رویکردهای غیر ثابت و محلی برای مدلسازی توزیع حیات وحش. غواصان. توزیع کنید. 2007 ، 13 ، 313-323. [ Google Scholar ] [ CrossRef ]
- INE. Estatísticas dos Transportes e Comunicações 2019—Instituto Nacional de Estatística (INE) ; INE: لیسبون، پرتغال، 2020؛ پ. 106. [ Google Scholar ]
- Baptista، N. Amphibian Roadkills: Hotspot Analysis and Locations of Anphibian Underpasses با استفاده از شاخص Gorelick. پایان نامه کارشناسی ارشد، دانشگاه اوورا، Largo dos Colegiais، پرتغال، 2006. [ Google Scholar ]
- گاریگا، ن. فرانچ، ام. سانتوس، ایکس. مونتوری، آ. Llorente، GA تغییرات فصلی در تلفات ترافیکی مهرهداران و پیامدهای آن برای اقدامات کاهشی. Landsc. طرح شهری. 2017 ، 157 ، 36-44. [ Google Scholar ] [ CrossRef ]
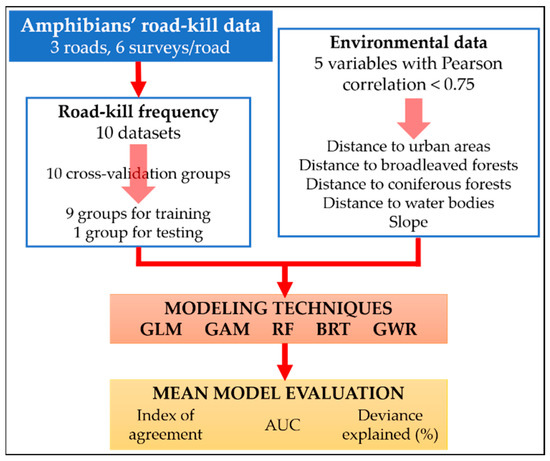
شکل 1. مراحل اصلی فرآیند تحقیق برای مقایسه عملکرد پنج تکنیک رگرسیون در مدلسازی کشتار جادهای دوزیستان. GLM: مدل های خطی تعمیم یافته. GAM: مدل های افزودنی تعمیم یافته. RF: جنگل تصادفی؛ BRT: درختان رگرسیون تقویت شده. GWR: رگرسیون وزندار جغرافیایی. AUC: ناحیه زیر منحنی.
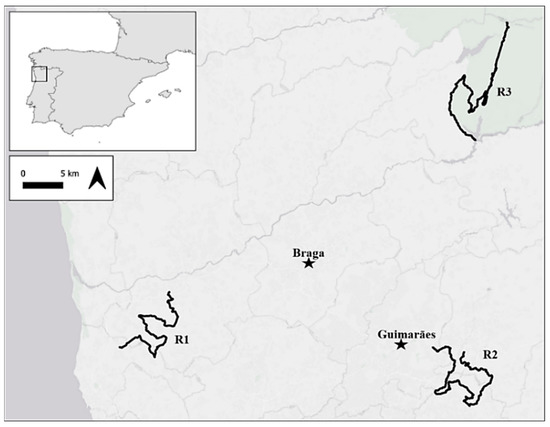
شکل 2. منطقه مطالعه با سه جاده بررسی شده (R1، R2 و R3) در شمال پرتغال.
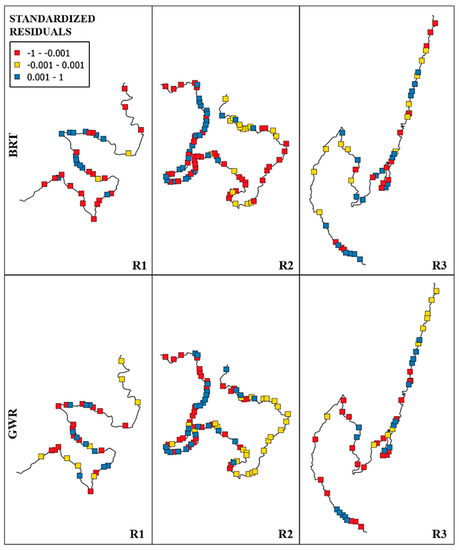
شکل 3. توزیع فضایی میانگین باقیمانده های استاندارد شده مدل در هر جاده بررسی شده از دو تکنیک با بهترین عملکرد: BRT و GWR. مربع های قرمز مکان هایی با باقیمانده های منفی، مربع های زرد مکان هایی با پیش بینی صحیح (باقیمانده های نزدیک به صفر) و مربع های آبی مکان هایی با باقیمانده های مثبت هستند.
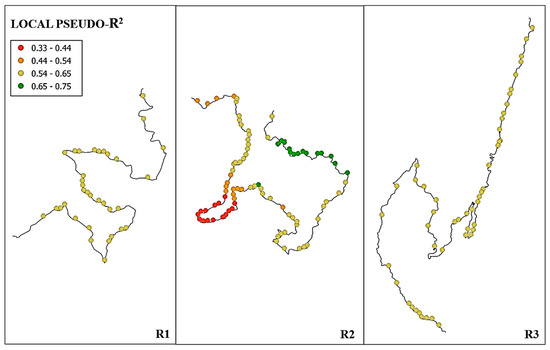
شکل 4. شبه R 2 محلی تجزیه و تحلیل GWR در هر جاده بررسی شده. در یک گرادیان از قرمز به سبز، نقاط سبز مقادیر بالاتر شبه R 2 محلی را نشان می دهند.
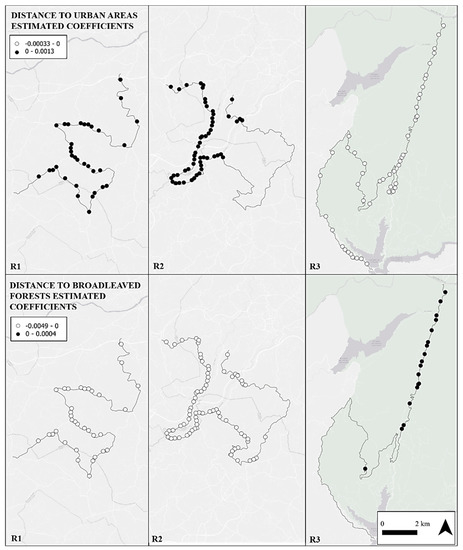
شکل 5. ضرایب قابل توجه تخمینی ( 05/ 0p <) دو متغیر به دست آمده با تکنیک GWR در سه راه: فاصله تا مناطق شهری (در بالا ) و فاصله تا جنگلهای پهن برگ (در پایین ). نقاط سفید نشان دهنده مکان هایی با ضرایب منفی و نقاط سیاه نشان دهنده مکان هایی با ضرایب مثبت هستند.


بدون دیدگاه