

یک روش تفکیک فضایی تطبیقی بر اساس مدل ST-ResNet برای پیشبینی جرم ملکی ساعتی
چکیده
کلید واژه ها:
ST-ResNet ; وضوح فضایی ؛ پیش بینی جرم ; جرم مالکیت
1. مقدمه
2. منطقه مطالعه و داده ها
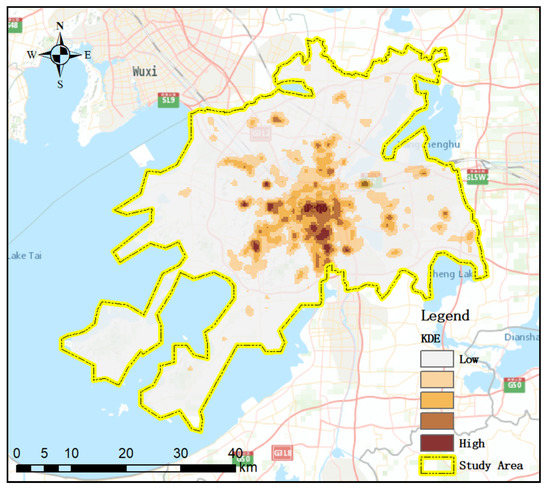
2.1. منطقه مطالعه و داده های جرم ملکی
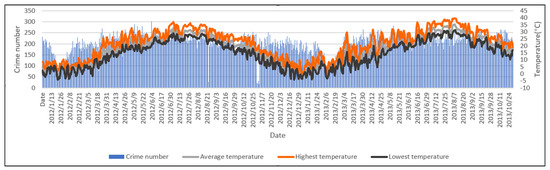
2.2. داده های آب و هوا
3. روش شناسی
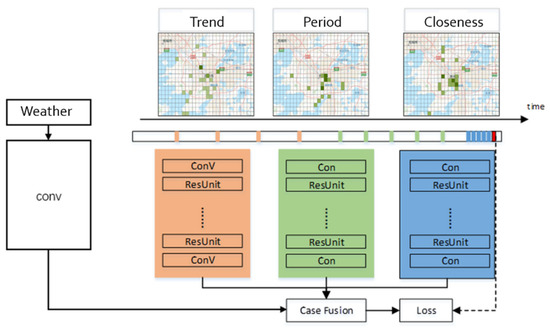
3.1. مدل ST-ResNet
برای آموزش مدل، خطای ریشه میانگین مربع (RMSE) بین ماتریس جرم پیشبینیشده و ماتریس جرم واقعی را به حداقل رساندیم:
جایی که ایکسمنارزش واقعی است، ایکس^منمقدار پیش بینی شده است و Z تعداد نقاط داده آموزشی [ 59 ] است.
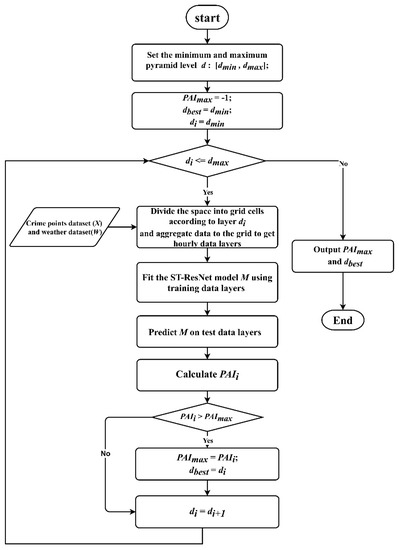
3.2. ارزیابی دقت
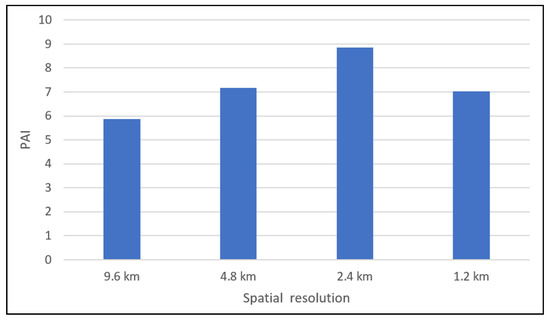
RMSE که تفاوت بین مقادیر پیشبینیشده و مشاهدهشده را ارزیابی میکند و امتیاز F1 [ 60 ] که دقت و یادآوری را ارزیابی میکند، وابسته به مقیاس هستند. یک شاخص ارزیابی پیشبینی جرم که معمولاً مورد استفاده قرار میگیرد، شاخص دقت پیشبینی (PAI) است [ 6 ]. این می تواند برای مقایسه دقت نقاط مهم محاسبه شده با روش های مختلف از طریق محاسبات بسیار ساده استفاده شود و می تواند نتایج پیش بینی را در وضوح ها و بزرگی های مختلف مقایسه کند. شکل کلی این متغیر به صورت زیر است:
جایی که nتعداد رویدادهای جرم و جنایت در مناطقی است که وقوع جنایات پیش بینی شده است. نتعداد رویدادهای جرم واقعی در کل منطقه مورد مطالعه است. آمنطقه ای از مناطقی است که وقوع جرم در آن پیش بینی می شود. آمساحت منطقه مورد مطالعه است. PAI را می توان به عنوان نرخ ضربه در مناطقی در نظر گرفت که جرایم با توجه به وسعت منطقه مورد مطالعه پیش بینی می شود. هرچه نرخ ضربه بیشتر و اثر پیش بینی بهتر باشد، PAI بالاتر خواهد بود.
4. نتایج
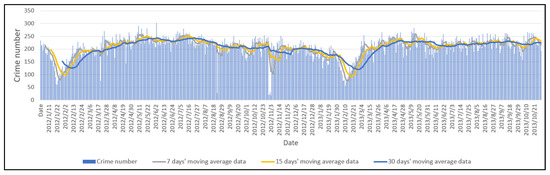
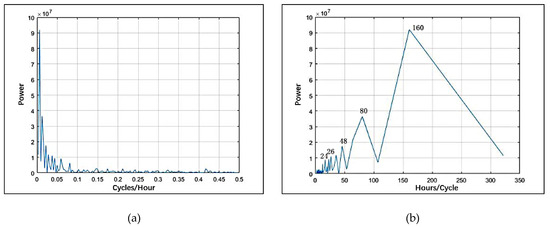
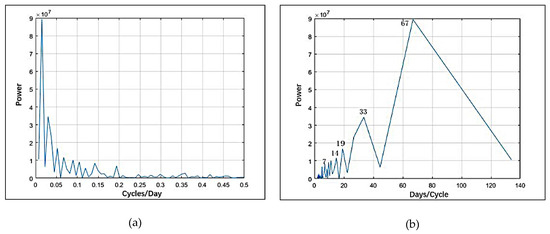
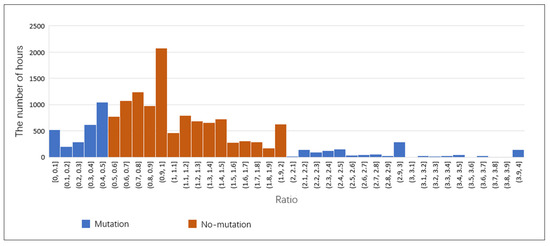
4.1. تحلیل داده ها
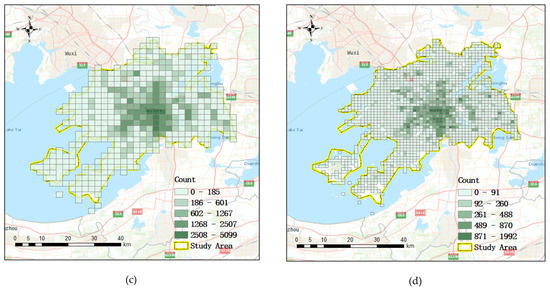
4.2. تجمیع داده ها
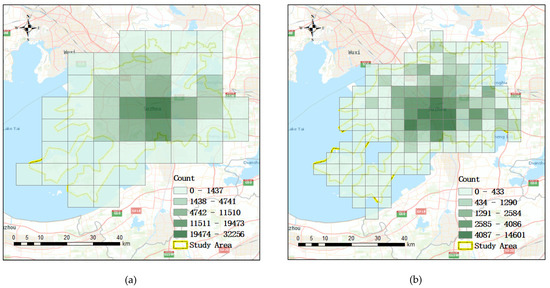
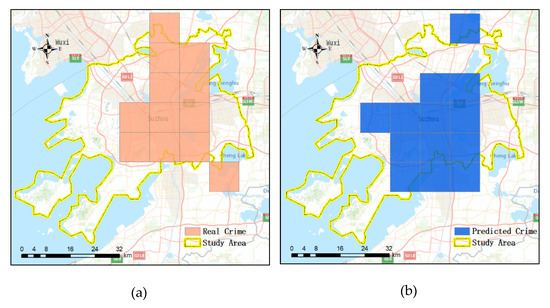
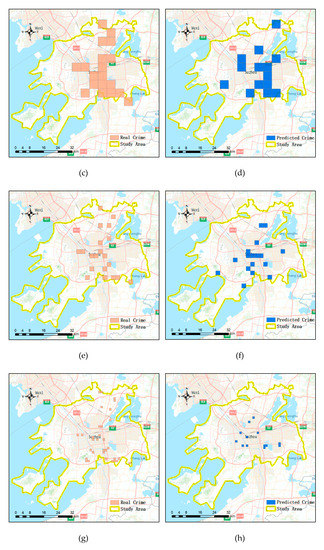
4.3. مدل ST-ResNet برای پیش بینی جرم در سوژو
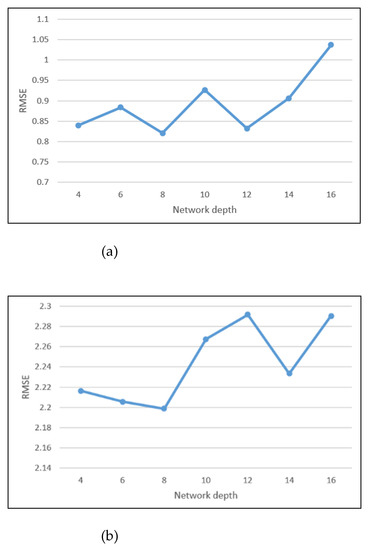
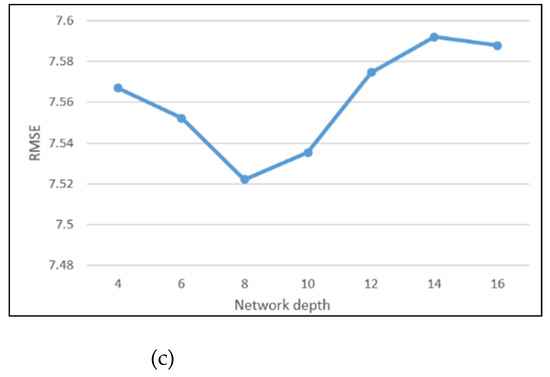
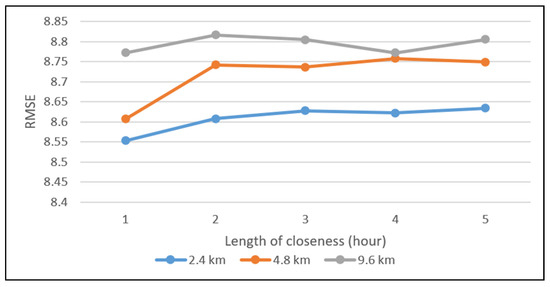
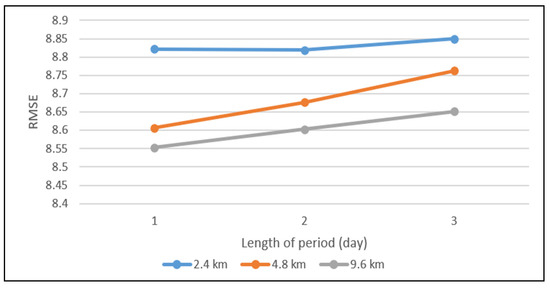
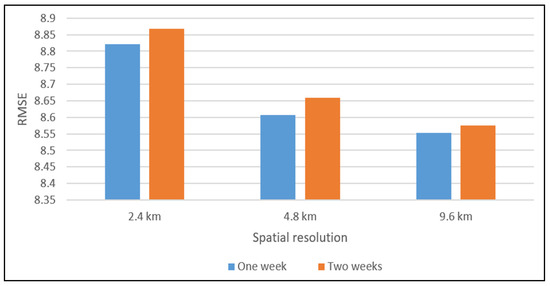
4.4. انتخاب وضوح فضایی بهینه
4.5. ارزیابی نتایج پیش بینی
5. نتیجه گیری و کار آینده
پیوست اول
منابع
- رومنز، آ. هاردینز، دبلیو. اثر تفکیک مکانی-زمانی بر عملکرد مدل پلیسی پیشبینیکننده. بین المللی J. پیش بینی. 2021 ، 37 ، 125-133. [ Google Scholar ] [ CrossRef ]
- هاردینز، دبلیو. رامنز، الف. پلیس پیش بینی به عنوان ابزاری جدید برای اجرای قانون؟ تحولات و چالش های اخیر. یورو جی. جنایت. نتیجه سیاست 2018 ، 24 ، 201-218. [ Google Scholar ] [ CrossRef ]
- لیو، ال. جی، جی. آهنگ، جی. آهنگ، جی. لیائو، دبلیو. یو، اچ. Liu, W. Hotspot Prediction of Public Project Crime بر اساس تمایز فضایی جرم و محیط ساخته شده. J. Geo-Inf. علمی 2019 ، 21 ، 1655-1668. [ Google Scholar ] [ CrossRef ]
- چن، ایکس. چو، ی. جانگ، SY پیشبینی جرم با استفاده از احساسات و آب و هوای توییتر. در مجموعه مقالات سمپوزیوم طراحی مهندسی سیستم و اطلاعات 2015، شارلوتزویل، ویرجینیا، ایالات متحده آمریکا، 24 آوریل 2015. [ Google Scholar ] [ CrossRef ]
- آقابابایی، س. مکره چی، م. استخراج محتوای رسانه های اجتماعی برای پیش بینی جرم. در مجموعه مقالات کنفرانس بین المللی IEEE/WIC/ACM 2016 در زمینه هوش وب (WI)، اوماها، NE، ایالات متحده آمریکا، 13 تا 16 اکتبر 2016. [ Google Scholar ] [ CrossRef ]
- چینی، اس. تامپسون، ال. Uhlig, S. Utility of Hotspot Mapping برای پیش بینی الگوهای فضایی جرم. امن J. 2008 , 21 , 4-28. [ Google Scholar ] [ CrossRef ]
- مولر، جی. پورتر، شبکه چرخشی MD، پیش بینی جرم به حداکثر رساندن PAI. آمار مقعدی حداقل داده 2018 ، 11 ، 227-236. [ Google Scholar ] [ CrossRef ]
- جفریس، ای. کاوش چند روشی نقاط داغ جرم و جنایت. در مجموعه مقالات نشست سالانه آکادمی علوم عدالت کیفری، آلبوکرکی، NM، ایالات متحده، 10-14 مارس 1998. صص 10-14. [ Google Scholar ]
- آدامز-فولر، تی. نقاط داغ قتل تاریخی: مورد سه شهر. Ph.D. پایان نامه، دانشگاه هاوارد، واشنگتن، دی سی، ایالات متحده آمریکا، 2001. در دسترس آنلاین: https://bit.ly/2Rw7NKc (دسترسی در 5 مه 2021).
- سامپسون، RJ; گرووز، ساختار جامعه و جرم و جنایت: آزمایش نظریه بیسازمانی اجتماعی. صبح. جی. سوسیول. 1989 ، 94 ، 774-802. در دسترس آنلاین: https://www.journals.uchicago.edu/doi/abs/10.1086/229068 (در 5 مه 2021 قابل دسترسی است). [ CrossRef ][ نسخه سبز ]
- مولر، برو؛ کوتاه، مگابایت؛ برانتینگهام، پی جی. شوئنبرگ، FP; تیتا، جنرال الکتریک مدل سازی فرآیند نقطه هیجان انگیز جنایت. مربا. آمار دانشیار 2011 ، 106 ، 100-108. [ Google Scholar ] [ CrossRef ]
- Mohler, G. نقشههای نقطههای مهم فرآیند نقطهگذاری شده برای پیشبینی جنایت قتل و اسلحه در شیکاگو. بین المللی J. پیش بینی. 2014 ، 30 ، 491-497. [ Google Scholar ] [ CrossRef ]
- گور، دبلیو. Olligschlaeger, A. Crime Hot Spot Forecasting: Modeling and Comparative Evaluation خلاصه ; خدمات مرجع عدالت کیفری ملی (NCJRS): Rockville, MD, USA, 2002. در دسترس آنلاین: https://www.ojp.gov/pdffiles1/nij/grants/195168.pdf (در 5 مه 2021 قابل دسترسی است).
- کورنیش، دی بی؛ کلارک، RV درک جابجایی جرم: کاربرد نظریه انتخاب عقلانی. جرم شناسی 1987 ، 25 ، 933-948. [ Google Scholar ] [ CrossRef ]
- برانتینگهام، پی جی. برانتینگهام، جرم شناسی محیطی PL ; انتشارات سیج: بورلی هیلز، کالیفرنیا، ایالات متحده آمریکا، 1981; در دسترس آنلاین: https://books.google.com/books?id=ITDTAAAAIAAJ (دسترسی در 5 مه 2021).
- کوهن، LE; فلسون، ام. تغییرات اجتماعی و روند نرخ جرم و جنایت: رویکرد فعالیت معمول. صبح. اجتماعی Rev. 1979 , 44 , 588-608. [ Google Scholar ] [ CrossRef ]
- پوترا، IGB؛ کو، پی اف. Chen, HH تحلیل فضایی اثر آلودگی هوا بر خشونت خانگی و سرقت در نیو ساوت ولز. در مجموعه مقالات چهلمین کنفرانس آسیایی سنجش از دور: پیشرفت فناوری سنجش از دور برای آینده هوشمند، ACRS 2019، Daejeon، کره، 14 تا 18 اکتبر 2019؛ در دسترس آنلاین: https://www.scopus.com/inward/record.url?scp=85085666037&partnerID=8YFLogxK (دسترسی در 5 مه 2021).
- ریستئا، ع. کوندی، ا. لایتنر، M. داده های رسانه های جغرافیایی اجتماعی به عنوان پیش بینی کننده ها در یک برنامه GWR برای پیش بینی نقاط داغ جرم (مقاله کوتاه). در مجموعه مقالات دهمین کنفرانس بین المللی علوم اطلاعات جغرافیایی (GIScience 2018)، ملبورن، استرالیا، 28 تا 31 اوت 2018. [ Google Scholar ] [ CrossRef ]
- جانسون، SD; Bowers، KJ دزدی به عنوان سرنخی برای آینده: آغاز نقطه داغ آینده نگر. یورو J. Criminol. 2004 ، 1 ، 237-255. [ Google Scholar ] [ CrossRef ]
- جانسون، SD; Bowers، KJ پایداری خوشههای فضا-زمان سرقت. برادر J. Criminol. 2004 ، 44 ، 55-65. [ Google Scholar ] [ CrossRef ]
- هانت، جی.ام. Acton، ST آیا نقاط داغ جنایی حرکت می کنند؟ بررسی اثرات مسئله واحد منطقه ای قابل تغییر و مسئله واحد زمانی قابل تغییر بر پایداری نقطه داغ جرم. Ph.D. پایان نامه، دانشگاه آمریکایی، واشنگتن، دی سی، ایالات متحده آمریکا، 2016. [ Google Scholar ]
- پیزا، EL; کارتر، JG پیش بینی آغازگر و رویدادهای تقریباً تکراری در الگوهای جرم و جنایت فضایی-زمانی: تجزیه و تحلیل سرقت مسکونی و سرقت وسایل نقلیه موتوری. عدالت Q. 2018 ، 35 ، 842-870. [ Google Scholar ] [ CrossRef ]
- وانگ، بی. ژانگ، دی. ژانگ، دی. برانتینگهام، پی جی. Bertozzi، AL Deep Learning برای پیشبینی زمان واقعی جنایت. arXiv 2017 , arXiv:1707.03340. [ Google Scholar ]
- کانگ، اچ. کانگ، اچ. پیشبینی وقوع جرم از دادههای چندوجهی با استفاده از یادگیری عمیق. PLoS ONE 2017 , 12 , e176244. [ Google Scholar ] [ CrossRef ] [ PubMed ]
- اسکیول، ن. نیکولیس، او. پرالتا، بی. Mateu، J. پیشبینی فضایی-زمانی رویدادهای جنایت بالتیمور با استفاده از شبکههای عصبی CLSTM. IEEE Access 2020 ، 8 ، 209101–209112. [ Google Scholar ] [ CrossRef ]
- Stec، A.; کلابجان، دی. پیش بینی جرم با یادگیری عمیق. arXiv 2018 , arXiv:1806.01486. [ Google Scholar ]
- او، ک. ژانگ، ایکس. رن، اس. Sun, J. یادگیری باقیمانده عمیق برای تشخیص تصویر. در مجموعه مقالات کنفرانس IEEE در مورد بینایی رایانه ای و تشخیص الگو (CVPR)، لاس وگاس، NV، ایالات متحده آمریکا، 27 تا 30 ژوئن 2016. [ Google Scholar ] [ CrossRef ][ Green Version ]
- ژانگ، جی. ژنگ، ی. Qi، D. شبکههای باقیمانده مکانی-زمانی عمیق برای پیشبینی جریانهای جمعیتی در سطح شهر. در مجموعه مقالات کنفرانس AAAI در مورد هوش مصنوعی، سانفرانسیسکو، کالیفرنیا، ایالات متحده آمریکا، 4 تا 9 فوریه 2017؛ در دسترس آنلاین: https://ojs.aaai.org/index.php/AAAI/article/view/10735 (دسترسی در 5 مه 2021).
- وانگ، بی. یین، پی. برتوزی، آل. برانتینگهام، پی جی. اوشر، اس جی. Xin, J. یادگیری عمیق برای پیشبینی جرم در زمان واقعی و سهگانهسازی آن. چانه. ان ریاضی. سر. B 2019 , 40 , 949–966. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- یوتنبوگارد، آ. Ceccato، V. خوشه های فضا-زمان جنایت در استکهلم، سوئد. کشیش Eur. گل میخ. 2012 ، 4. [ Google Scholar ] [ CrossRef ]
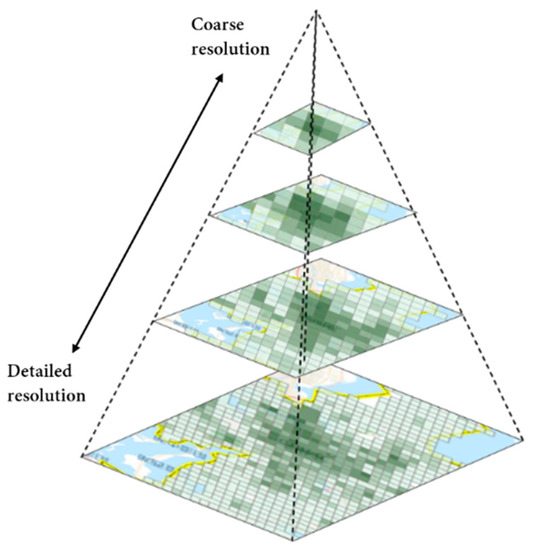
- برانتینگهام، پی جی. Dyreson، DA; جنایت Brantingham، PL از طریق مخروطی از وضوح دیده می شود. صبح. رفتار علمی 2016 ، 20 ، 261-273. [ Google Scholar ] [ CrossRef ]
- هابرمن، CP; راتکلیف، جی اچ چالشهای پلیسی پیشبینیکننده سرقتهای مسلحانه خیابانی تقریباً تکراری. سیاسی J. سیاست سیاست. 2012 ، 6 ، 151-166. [ Google Scholar ] [ CrossRef ]
- Bowers، KJ; جانسون، تکرارهای سرقت خانگی SD و خوشههای فضا-زمان: ابعاد ریسک. یورو J. Criminol. 2005 ، 2 ، 67-92. [ Google Scholar ] [ CrossRef ]
- بلوک، اس. فوجیتا، اس. الگوهای تقریباً تکرار سرقت های موقت و دائم وسایل نقلیه موتوری. جنایت قبلی جامعه ایمن 2013 ، 15 ، 151-167. [ Google Scholar ] [ CrossRef ]
- ناکس، EG; بارتلت، ام اس تشخیص تعاملات فضا-زمان. JR Stat. Soc. سر. C (Appl. Stat.) 1964 ، 13 ، 25-30. [ Google Scholar ] [ CrossRef ]
- وانگ، ز. لیو، ایکس. تجزیه و تحلیل نقاط داغ سرقت و قربانی شدن تقریباً تکراری در یک شهر بزرگ چین. ISPRS Int. J. Geo-Inf. 2017 ، 6 ، 148. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- Bowers، KJ; جانسون، SD; Pease، K. نقطه داغ آینده نگر: آینده نقشه برداری جرم و جنایت؟ برادر J. Criminol. 2004 ، 44 ، 641-658. [ Google Scholar ] [ CrossRef ]
- جانسون، SD; Birks، دی جی; مک لافلین، ال. Bowers، KJ; Pease, K. نقشه برداری جنایت آینده نگر در زمینه عملیاتی: گزارش نهایی ; وزارت کشور: لندن، انگلستان، 2007; در دسترس آنلاین: https://bit.ly/3tkAmHV (دسترسی در 5 مه 2021).
- اوبرویتلر، دی. Wikström، POH چرا کوچک بهتر است: پیشبرد مطالعه نقش زمینه های رفتاری در علت جرم. در قرار دادن جرم در جای خود: واحدهای تحلیل در جرم شناسی جغرافیایی ; Weisburd, D., Bernasco, W., Bruinsma, G., Eds. Springer: New York, NY, USA, 2009; صص 33-60. [ Google Scholar ] [ CrossRef ]
- ویزبرد، دی. گراف، ای آر. یانگ، اس . جرمشناسی مکان: بخشهای خیابان و درک ما از مسئله جرم ؛ انتشارات دانشگاه آکسفورد: آکسفورد، انگلستان، 2012. [ Google Scholar ] [ CrossRef ]
- شرمن، LW; گارتین، روابط عمومی؛ بورگر، ME نقاط داغ جنایت غارتگر: فعالیتهای روتین و جرمشناسی مکان. جرم شناسی (بورلی هیلز) 1989 ، 27 ، 27-56. [ Google Scholar ] [ CrossRef ]
- اپن شاو، اس. Taylor، PJ یک میلیون یا بیشتر ضرایب همبستگی: سه آزمایش بر روی مسئله واحد سطحی قابل تغییر. در کاربردهای آماری در علوم فضایی ; Wrigley، N.، Ed. پیون: لندن، بریتانیا، 1979; صص 127-144. [ Google Scholar ]
- گرل، ام. کوچکترین بهتر است؟ توزیع فضایی آتش سوزی و مسئله واحد منطقه ای قابل تغییر. جی. کوانت. Criminol. 2017 ، 33 ، 293-318. [ Google Scholar ] [ CrossRef ]
- مالسون، ن. استین بیک، دبلیو. اندرسن، MA شناسایی وضوح فضایی مناسب برای تحلیل الگوهای جرم و جنایت. PLoS ONE 2019 , 14 , e218324. [ Google Scholar ] [ CrossRef ]
- راموس، آر جی. سیلوا، BFA; کلارک، کی سی; Prates، M. خیلی خوب است که خوب باشد؟ مسائل دانه بندی، یکنواختی و خطا در تحلیل جرم فضایی. جی. کوانت. Criminol. 2020 . [ Google Scholar ] [ CrossRef ]
- Rui, LI تکامل تاریخی تجاوز به جرم ملکی با موارد مکرر و اقدامات متقابل تحقیق و پیشگیری در 1995-2010. جی. چین. امنیت عمومی مردم دانشگاه (Soc. Sci. Ed.) 2012 ، 28 ، 117-124. [ Google Scholar ]
- مایجر، ع. وسلز، ام. پلیس پیش بینی: بررسی مزایا و معایب. بین المللی J. Public Adm. 2019 ، 42 ، 1031–1039. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- یانگ، بی. لیو، ال. لان، ام. وانگ، ز. ژو، اچ. Yu, H. یک روش مکانی-زمانی برای پیشبینی جرم با استفاده از دادههای جرم تاریخی و مناطق انتقالی شناساییشده از تصاویر نور شب. بین المللی جی. جئوگر. Inf. علمی IJGIS 2020 ، 34 ، 1740-1764. [ Google Scholar ] [ CrossRef ]
- بنسون، BL; کیم، آی. راسموسن، DW; Zhehlke، TW آیا جرم مالکیت ناشی از مصرف مواد مخدر است یا سیاست اجرای مواد مخدر؟ Appl. اقتصاد 1992 ، 24 ، 679-692. [ Google Scholar ] [ CrossRef ]
- Sjoquist، DL جرم و جنایت اموال و رفتار اقتصادی: برخی نتایج تجربی. صبح. اقتصاد Rev. 1973 , 63 , 439-446. [ Google Scholar ]
- Trujillo, JC; هاولی، پی. تأثیر آب و هوا بر جرم و جنایت در یک منطقه شهری خشن. محیط زیست رفتار 2021 ، 53 ، 69-90. [ Google Scholar ] [ CrossRef ]
- پری، جی دی. سیمپسون، من جنایات خشونت آمیز در یک شهر: عوامل تعیین کننده محیطی. محیط زیست رفتار 1987 ، 19 ، 77-90. [ Google Scholar ] [ CrossRef ]
- Cohn، EG آب و هوا و جنایات خشونت آمیز. محیط زیست رفتار 2016 ، 22 ، 280-294. [ Google Scholar ] [ CrossRef ]
- کوهن، EG; روتون، جی. آب و هوا، روندهای فصلی و جرایم مالکیت در مینیاپولیس، 1987-1988. تجزیه و تحلیل سری زمانی متغیر تعدیل کننده از فعالیت های معمول. جی. محیط زیست. روانی 2000 ، 20 ، 257-272. [ Google Scholar ] [ CrossRef ]
- داده های گلخانه ای در دسترس آنلاین: https://data.sheshiyuanyi.com/ (در 8 مارس 2021 قابل دسترسی است).
- دی کولا، ال. Montagne، N. سیستم هرمی برای تجزیه و تحلیل شطرنجی چند مقیاسی. محاسبه کنید. Geosci-Uk 1993 ، 19 ، 1393-1404. [ Google Scholar ] [ CrossRef ]
- فیل یانگ، سی. وانگ، DW; یانگ، آر. کافاتوس، م. لی، کیو. تکنیک های بهبود عملکرد در GIS مبتنی بر وب. بین المللی جی. جئوگر. Inf. علمی 2005 ، 19 ، 319-342. [ Google Scholar ] [ CrossRef ]
- کوین، اس. گاهگان، ام. یک مدل پیشبینی برای کاشیهای متداول در نقشه وب. تی گیس. 2010 ، 14 ، 193-216. [ Google Scholar ] [ CrossRef ]
- کورت، جی. Willmott، KM مزایای میانگین خطای مطلق (MAE) نسبت به ریشه میانگین مربعات خطا (RMSE) در ارزیابی میانگین عملکرد مدل. صعود Res. 2005 ، 30 ، 79-82. [ Google Scholar ] [ CrossRef ]
- گوت، سی. گاوسیر، ای. یک تفسیر احتمالی از دقت، یادآوری و امتیاز F، با مفهومی برای ارزیابی. در پیشرفت در بازیابی اطلاعات. ECIR. نکات سخنرانی در علوم کامپیوتر ; Losada، DE، Fernández-Luna، JM، Eds. Springer: برلین/هایدلبرگ، آلمان، 2005; جلد 3408. [ Google Scholar ] [ CrossRef ]
- راتکلیف، جی اچ. الگوهای Rengert، GF تقریباً تکراری در تیراندازیهای فیلادلفیا. امن J. 2008 ، 21 ، 58-76. [ Google Scholar ] [ CrossRef ]
- تجزیه و تحلیل داده های چرخه ای با FFT. در دسترس آنلاین: https://ww2.mathworks.cn/help/matlab/math/using-fft.html?lang=en (در 8 مارس 2021 قابل دسترسی است).
- Spearman, C. نمایش فرمول برای اندازه گیری واقعی همبستگی. صبح. جی روانی. 1907 ، 18 ، 161-169. [ Google Scholar ] [ CrossRef ]
- پیوتروسکی، AP; Napiorkowski، JJ مقایسه روشهایی برای جلوگیری از برازش بیش از حد در آموزش شبکههای عصبی در مورد مدلسازی رواناب حوضه. جی هیدرول. 2013 ، 476 ، 97-111. [ Google Scholar ] [ CrossRef ]
- لیائو، آر. ون، اچ. وو، جی. آهنگ، اچ. پان، اف. دونگ، ال. پیشبینی کانال محو شدن ریلی از طریق یادگیری عمیق. سیم. اشتراک. اوباش محاسبه کنید. 2018 . [ Google Scholar ] [ CrossRef ]
- رن، ی. چن، اچ. هان، ی. چنگ، تی. ژانگ، ی. چن، جی. یک مدل یادگیری عمیق ترکیبی یکپارچه برای پیشبینی حجمهای جریان مکانی-زمانی در سطح شهر. بین المللی جی. جئوگر. Inf. علمی 2020 ، 34 ، 802-823. [ Google Scholar ] [ CrossRef ]


بدون دیدگاه