1. مقدمه
بسیاری از کاربردها نیاز به تولید مدلهای زمین دیجیتال (DTMs) دارند، که توسط درون یابی نقاط متعلق به سطح زمین برهنه [ 1 ] از دادههای ارتفاعسنجی تولید شده از روشهای مرسوم یا پیشبینیسنجی تولید میشوند. در میان روشهای کیفی مناسب، روشهای مبتنی بر ایستگاههای کل (TS) یا سیستمهای ماهوارهای ناوبری جهانی (GNSS) به جمعآوری دادههای جغرافیایی دقیق در سطح زمین کمک میکنند. با این حال، جمع آوری داده های میدانی با وضوح بالا با استفاده از این روش ها اغلب وقت گیر و پرهزینه است [ 2 ، 3 ].
با توسعه و استقرار سیستمهای تشخیص و محدوده تصویربرداری لیزری (LiDAR) و اسکنرهای لیزری زمینی (TLS)، جمعآوری دادههای پیمایش میدانی ساده شده است، زیرا میتوان اطلاعات را با وضوح فضایی بالاتر بهدست آورد و سطوح بررسیشده بهتر نمایش داده میشوند [ 4 ] . با این حال، نقطه ضعف اصلی فناوری LiDAR این است که هنوز مقرون به صرفه نیست [ 5 ].
هزینه روش های زمینی نسبتاً بالا است و به طور کلی، نقشه برداری توپوگرافی با وضوح بالا با هزینه های سرمایه ای و لجستیکی بالا همراه است [ 6 ]. بنابراین، در دهه گذشته، وسایل نقلیه هوایی بدون سرنشین (پهپادها) مجهز به دوربینهای دیجیتال همراه با تکنیکهای پردازش تصویر فتوگرامتری، معروف به ساختار از حرکت (SfM)، به یک فناوری جایگزین مناسب برای جمعآوری امتیازات دقیق برای تولید DTM با بالا تبدیل شدند. وضوح فضایی [ 3 ، 7 ، 8 ]. فتوگرامتری پهپاد یک پلت فرم اقتصادی تر و کم هزینه است و می توان از دوربین های تجاری RGB استفاده کرد [ 6 ، 9 ، 10 ].
فتوگرامتری هوایی یک زمینه جذاب سنجش از دور است که گزینه های مختلف و بسیاری از کاربردهای جدید را ارائه می دهد و برای ارائه نتایج کنترل شده نیاز به پردازش دقیق دارد [ 11 ]. با فتوگرامتری دیجیتال، محصولات توپوگرافی سه بعدی، مانند مدلهای ارتفاعی دیجیتال (DEMs)، DTMs یا مدلهای سطح دیجیتال (DSM)، خطوط کانتور، مدلهای سهبعدی بافت، دادههای برداری، و غیره را میتوان به روشی کاملاً خودکار تولید کرد. مزیت اصلی فتوگرامتری پهپاد ظرفیت آن برای عکسبرداری مستقیم، سریع و دقیق از یک منطقه مطالعه با حداقل کار میدانی است. این ویژگیها منجر به کاهش هزینهها و تکمیل پروژه بسیار سریعتر میشود، علاوه بر این امکان بررسی از راه دور اشیاء و مناطق پیچیده، غیرقابل دسترس و خطرناک – به عنوان مثال، [ 10 ، 12 ]].
فتوگرامتری پهپاد برای اهداف مختلف استفاده شده است: برای به دست آوردن توپوگرافی کوه [ 13 ]، ویژگی های ژئومورفیک معادن [ 14 ]، ژئومورفولوژی یخبندان و اطراف یخبندان [ 15 ]، و مدل های دیجیتالی محیط های ساحلی [ 3 ]، برای نقشه برداری پیوسته از ارتفاع سطح. تغییرات [ 16 ]، تسطیح زمین [ 17 ]، نقشه برداری شیب [ 18 ]، برای نقشه برداری زمین لغزش و خصوصیات [ 19 ]، نقشه برداری پیشین [ 20 ، 21 ]، کمی سازی فرسایش خاک بر اساس مقایسه ارتفاعی دو تاریخ مختلف، نظارت تغییرات توپوگرافی رودخانه [ 22]، برای حمایت از طراحی شبکه های زهکشی تراس [ 7 ]، مشاهده دینامیک ورقه یخ [ 8 ]، برای ارزیابی خسارت سیل شهری [ 23 ]، و نقشه برداری از غلظت زباله های دریایی در مناطق ساحلی [ 24 ].
این و بسیاری از مطالعات دیگر، نشان میدهند که فتوگرامتری هوایی مبتنی بر پهپاد میتواند از نظر دقت، وضوح فضایی، اتوماسیون و هزینهها در مقایسه با تکنیکهای دیگر، مانند LiDAR [ 25 ]، TLS [ 2 ]، TS [ 18 ] رقابتی باشد. ] یا GNSS [ 26 ]، برای کاربردهای خاص، تا زمانی که رویههای خاص و بهینهسازی پارامترهای نظرسنجی دنبال شوند.
دقت موقعیت و کیفیت DTM که فتوگرامتری پهپاد می تواند ارائه دهد در مطالعات مختلف مورد توجه است. دقت موقعیتی نشان دهنده نزدیکی آن مقادیر به موقعیت “واقعی” موجودیت در آن سیستم است. الزامات دقت موقعیت برای یک DTM مستقیماً با استفاده مورد نظر آن مرتبط است [ 27 ]. کمیته داده های جغرافیایی فدرال [ 28 ] توصیه های مقدار آستانه دقت را برای انواع مختلف پروژه ها نشان می دهد که می توانند به عنوان یک چارچوب مرجع استفاده شوند. با این حال، سازمانهای دولتی میتوانند محدودیتهایی را برای مشخصات محصول و کاربردها و اهداف قراردادی خود تعیین کنند.
از این نظر، دقت DTM یکی از نگرانی های مبرم است و به شدت به کیفیت بررسی میدانی بستگی دارد. چندین نویسنده دقت DEMs پارامتر بهدستآمده با فتوگرامتری پهپاد را مطالعه کردهاند – به عنوان مثال، [ 29 ، 30 ]. وضوح فضایی می تواند چند سانتی متر (<10 سانتی متر در پیکسل) باشد. اجرای برنامه ریزی پرواز و استراتژی های میدانی به خوبی تثبیت شده، استفاده از تنظیمات مناسب دوربین یا ایجاد تعداد مناسب نقاط کنترل زمینی (GCPs) می تواند به دستیابی به DEM با دقت و کیفیت بالا کمک کند [ 2 ، 31 ]. در غیر این صورت، کیفیت DEM ممکن است بدتر شود.
به نظر می رسد تولید DTM یک فرآیند ساده باشد. با این حال، دقت DTM بالا نیازمند بهینهسازی روشهای فتوگرامتری و پارامترهای بررسی است و از قوانین ضروری پرواز پهپاد پیروی میکند [ 3 ، 5 ]. بنابراین، دستورالعملهای بهترین عمل برای اپراتورهای حرفهای پهپاد ضروری است، زیرا ممکن است تحت فشار برای بهینهسازی زمان خود و به حداقل رساندن هزینههای خود برای اجرای چندین کار متوالی باشند. در چنین شرایطی، بررسی دقیق دقیق برای هر موقعیتی غیرعملی است.
برای به دست آوردن دقت بالا در محصولات توپوگرافی نهایی باید از تجربه و کار قبلی استفاده کرد [ 32 ]. اگرچه مقالات متعددی در مورد کیفیت دادههای بررسی میدانی وجود دارد، اما لازم است دانش پراکنده موجود در ادبیات با تمرکز بر پلتفرمهای پهپاد کمهزینه برای به دست آوردن DTMهای دقیق، ادغام شود.
به این ترتیب، هدف این مطالعه ارائه پیشرفتهای اخیر، تکمیلشده با تجربه نویسندگان، در مورد روشهای فتوگرامتری هوایی و کیفیت پارامترهای بررسی میدانی است که باید برای بهبود تولید DTM با پلتفرمهای پهپاد ارزانقیمت در نظر گرفته شوند. بیش از 70 مطالعه در جایی که دقت DTM مرتبط بود، بر اساس متغیرهای مختلف مربوط به زمین، پرواز پهپاد، سنسور دوربین، ارجاع جغرافیایی و پس پردازش، تجزیه و تحلیل شد.
این اثر به چهار بخش تقسیم شده است. در بخش اول به پلتفرم های پهپاد و نقش دوربین در کیفیت و دقت DTM ها می پردازیم. در بخش دوم، نقش هر یک از متغیرهای برنامه ریزی پرواز (ارتفاع پرواز، همپوشانی تصویر، سرعت پهپاد، جهت خطوط پرواز و پیکربندی دوربین)، نقاط کنترل (تعداد و پیکربندی)، و پردازش تصاویر (نرم افزار و فیلتر زمین) در دقت و وضوح DTM. در بخش سوم، ما تجزیه و تحلیل میکنیم که آیا فتوگرامتری پهپاد میتواند در انواع مختلف پوشش زمین (زمینهای بایر، پوشش گیاهی و تودههای آبی) استفاده شود. در بخش های باقی مانده، در مورد ارزیابی دقت ارائه شده است. در نتیجه گیری، توصیه های اولیه ما برای به دست آوردن DTM با کیفیت بالا، همانطور که از کار به دست آمده، ارائه شده است.
2. سیستم های جمع آوری داده های پهپاد
2.1. پلتفرم های پهپاد
انتخاب نوع پلت فرم پهپاد (بال ثابت یا چند کوپتر) به کاربرد خاص، وضوح لازم در ابر نقطه سه بعدی، مساحت و موقعیت محل مطالعه و شرایط آب و هوایی بستگی دارد. به نظر می رسد دقت ابر نقطه سه بعدی مستقل از پلتفرم پهپاد است – به عنوان مثال، [ 33 ، 34 ]. راگلز و همکاران [ 34 ] دریافتند که وضوح ابر نقطه ای هنگام استفاده از پهپادهای چندکوپتر به جای پهپادهای بال ثابت بهبود می یابد. گومز-گوتیرز و گونسالوز [ 33] دریافت که یک ابر نقطه ای که با استفاده از مولتی کوپتر به دست می آید، تغییرات کوچک تری نسبت به ابر نقطه ای تولید شده توسط بال ثابت را شناسایی می کند. آنها به این نتیجه رسیدند که بال ثابت ممکن است جایگزین بهتری برای مولتی کوپتر در هنگام کاوش ویژگی های عمودی با شیب شیب مشابه یا پایین تر (<52 درجه) باشد. مولتی کوپترها اغلب می توانند بار بیشتری را حمل کنند که امکان نصب سیستم های سنجش پیشرفته و پیچیده تر را فراهم می کند. پهپادهای بال ثابت برای ثبت تصاویر مناطق بزرگتر مناسب ترند.
با توجه به توانایی پرواز در ارتفاعات پایین، مولتی کوپترها در مواقعی که جزئیات سطح ریزتر مورد نیاز است، مناسبتر هستند و معمولاً برای گرفتن تصاویر هوایی مورب استفاده میشوند. آنها همچنین می توانند در یک منطقه کوچک بلند شوند و فرود بیایند. با این حال، منطقه تحت پوشش به دلیل سرعت پرواز نسبتا کم و تخلیه باتری زیاد [ 35 ] محدود است و بیشتر تحت تأثیر عوامل محیطی، مانند دمای شدید قرار میگیرد. در سایت هایی که به راحتی در دسترس نیستند، یک پلت فرم با اندازه و وزن جمع و جور، ترجیحاً مناسب برای حمل در کوله پشتی، توصیه می شود. در این شرایط، یک مولتیکوپتر مناسب تر از یک بال ثابت است [ 10 ].
2.2. کالیبراسیون دوربین
کالیبراسیون دوربین به طور سنتی تنها مهمترین عامل تعیینکننده پتانسیل دقت و تا حد زیادی قابلیت اطمینان اندازهگیریهای فتوگرامتری با برد نزدیک بوده و هست [ 36 ]. پهپادها عموماً مجهز به دوربینهای دیجیتال RGB غیر متریک هستند و معمولاً به طور واضح برای نقشه برداری فتوگرامتری طراحی نشدهاند.
دوربین های دیجیتال RGB غیر متریک به دلیل وزن سبک و هزینه کم انتخابی محبوب هستند. با این حال، نوع دوربین انتخاب شده و وضوح تصویر می تواند بر دقت محصول نهایی تأثیر بگذارد – به عنوان مثال، [ 34 ]. این دوربین ها کیفیت رادیومتریک خوبی دارند اما کیفیت هندسی پایینی دارند که ناشی از اعوجاج لنز است. بنابراین، انجام کالیبراسیون برای به دست آوردن اندازه گیری های فتوگرامتری قابل اعتماد بسیار توصیه می شود.
کالیبراسیون دوربین را می توان با دو استراتژی انجام داد: یا به طور مستقل از اکتساب های هوایی (پیش کالیبراسیون) یا در تنظیم بلوک بسته (خود کالیبراسیون) انجام شود. پیش کالیبراسیون اغلب در آزمایشگاه با استفاده از تصاویر همگرا و عمق صحنه متفاوت انجام می شود [ 37 ]. در حالی که اکثر نرمافزارهای تجاری شامل کالیبراسیون خود دوربین میشوند، این را میتوان با استفاده از نرمافزار (مثلاً Agisoft Lens یا Photomodeler) و برگههای کالیبراسیون از پیش تعیینشده نیز محقق کرد.
خود کالیبراسیون کار کالیبراسیون را بسیار ساده کرده است و احتمالاً کاربردی ترین روش در مطالعات مختلف باقی خواهد ماند. لومان و همکاران [ 36 ] قوانین خود کالیبراسیون را برای به حداقل رساندن خطاهای مشاهده و ارائه تخمین های دقیق تر پارامترهای کالیبراسیون توضیح داد. این قوانین شامل ترکیب تصاویر مایل در پروژه یا تنظیمات زوم/فوکوس ثابت و دیافراگم بدون تغییر لنز یا تنظیمات در طول گرفتن تصویر است [ 36 ]. پیروی از این قوانین به خوبی اثبات شده برای خود کالیبراسیون می تواند امکان اندازه گیری قابل اعتماد را تقریباً از هر دوربینی فراهم کند.
3. برنامه ریزی پرواز و جذب تصویر
برنامه ریزی پرواز احتمالاً پیچیده ترین و مهم ترین بخش کار میدانی است. این شامل ملاحظات زیادی است که تأثیر قابل توجهی بر کیفیت و دقت DTM دارد. همچنین به دلیل مشکلات برنامه ریزی یا تدارکاتی، مانند مجوز پرواز و آب و هوا، بازگشت به عقب و به دست آوردن داده های جدید آسان نیست.
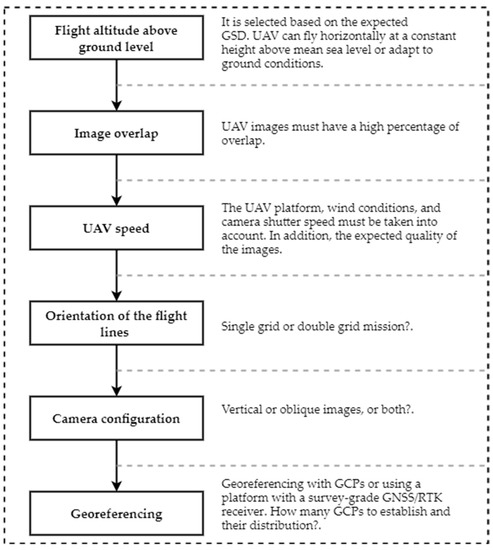
بر اساس ویژگی های لازم در DTM نهایی (رزولیشن و دقت مورد انتظار)، پارامترهای برنامه ریزی خاصی قبل از پرواز تعریف می شوند ( شکل 1 ): ارتفاع، همپوشانی تصویر (همپوشانی جلو و کنار)، سرعت پهپاد، پارامترهای مربوط به جهت گیری خطوط پرواز و تعداد نقاط کنترل زمینی (GCP) و ایست های بازرسی (CPs). برای تعریف این پارامترها، دانستن محدودیت های عملیاتی سکوها در کشور یا استانی که پرواز در آن انجام می شود نیز ضروری است. علیرغم اهمیت این پارامترها، جزئیات پردازش کافی برای درک کامل علل تغییرپذیری در بسیاری از آثار ارائه نشده است.
3.1. ارتفاع پرواز از سطح زمین (AGL)
یکی از مهم ترین پارامترها در پرواز پهپاد ارتفاع است. ارتفاع، وضوح مکانی در تصاویر ثبت شده، مدت پرواز، تعداد تصاویر در واحد سطح و منطقه تحت پوشش را تعیین می کند. ارتفاع پرواز تحت تأثیر مقدار فاصله نمونه زمین (GSD) و پارامترهای داخلی سنسور دوربین قرار می گیرد. از معادلات (1) و (2) برای محاسبه AGL استفاده می شود و کوچکترین مقدار حاصل از هر دو معادله انتخاب می شود [ 38 ].
که در آن AGL ارتفاع پرواز از سطح زمین ( AGL ) (m) است. f فاصله کانونی (mm) است. GSD (m/pixel)؛ HR و VR وضوح افقی و عمودی سنسور (px) هستند. SW عرض سنسور (mm) است. SH ارتفاع سنسور (mm) است.
اکثر مطالعات علمی تصاویری را با مقادیر GSD بین <0.01 و 0.50 متر و ارتفاعات بین 5 تا 250 متر ثبت می کنند [ 39 ]. ارتفاع پایین پرواز نشان دهنده وضوح فضایی بالا است، اما منطقه محدودی از زمین را پوشش می دهد و مدت زمان پرواز و زمان پردازش یک منطقه خاص را افزایش می دهد. ارتفاع پرواز بالا (بیش از 120 متر) می تواند باعث شود GCP ها در تصاویر متمایز نشوند. در بسیاری از کشورها، این نیز معمولاً تنظیم می شود ( جدول 1 ). وضوح فضایی بالا لزوماً به معنای دقت بالا در DTM تولید شده نیست. مشکل مرتبط با وضوح فضایی بالا مربوط به قدرت محاسباتی مورد نیاز است، زیرا افزایش وضوح به معنای افزایش قابل توجهی در حجم داده است [ 40 ].
جدول 1. حداکثر ارتفاع مجاز برای پروازهای پهپاد (تهیه شده توسط نویسندگان با اطلاعات Reger و همکاران [ 41 ]).
برای نقشه برداری، اگر زمین مسطح یا تقریباً هموار باشد، روش معمول برای گرفتن زمین با پهپاد این است که به صورت افقی در ارتفاع ثابت بالاتر از سطح متوسط دریا (MSL) پرواز کنید. در تغییر ناگهانی زمین، ارتفاع پرواز باید به جای حفظ ارتفاع ثابت بالای MSL، با ارتفاع زمین در هر خط پرواز منطبق شود.
توصیه قبلی به این دلیل است که وقتی یک پهپاد در ارتفاع ثابت بالای MSL پرواز می کند، محققان دریافتند که مقادیر میانگین مربعات خطای ریشه عمودی (RMSE) در مناطق با مورفولوژی پیچیده در مقایسه با مناطق مسطح بزرگتر است [ 42 ، 43 ]. در مورفولوژی پیچیده، فاصله بین سنسور و زمین ثابت نیست، و همپوشانی کاهش مییابد و میتواند در نواحی بسیار شیبدار به شدت کم شود، که باعث میشود تصاویر کمتری در مناطق شیب دار در مقایسه با مناطق کم همپوشانی داشته باشند ( شکل 2 ).
نویسندگان مختلف دقت DTM را با توجه به مقادیر مختلف AGL مطالعه کردند ( جدول 2 ). گومز-کاندون و همکاران [ 44 ] دریافت که RMSE DEM با افزایش ارتفاع پرواز از 30 به 60 متر 1 سانتی متر افزایش یافت، در حالی که در ارتفاعات 60 تا 100 متر، RMSE تقریباً ثابت بود. Agüera-Vega و همکاران. [ 45 ] نشان داد که وقتی GSD افزایش یافت، دقت عمودی تمایل به کاهش داشت و دقت افقی تحت تأثیر ارتفاع پرواز قرار نمیگرفت. آنها دریافتند که RMSE عمودی در 50 تا 80 متر افزایش یافته و در ارتفاعات 80 تا 120 متر تقریباً ثابت است. این مطالعات نشان داد که هر چه ارتفاع پرواز بالاتر باشد، RMSE در DEM بیشتر است. با این حال، به ارتفاع (بیش از 60 متر) رسید که در آن RMSE تقریبا ثابت بود.
راک و همکاران [ 46 ] دریافتند که دقت جهت گیری حسگر غیر مستقیم با افزایش ارتفاع پرواز کاهش می یابد. با این حال، آنها بهترین دقت را برای ارتفاعات متوسط پرواز (100 تا 150 متر) گزارش کردند. Yurtseven [ 47 ] دریافت که دادههای ارتفاع کم تحت تأثیر پدیدهای به نام «اثر گنبدی» قرار میگیرند، که نقصی در الگوریتم بازسازی سهبعدی برای فرآیندهای فتوگرامتری در نظر گرفته میشود. نتایج گزارش شده توسط Zimmerman و همکاران. [ 48 ] نشان داد که پرواز در ارتفاعات بالاتر (بیش از 90 متر) DEM دقیق تری تولید می کند. Yurtseven [ 47 ] نتایج مشابهی را در ارتفاعات پایین تر (<50) یافت که در آن خطا در DEM افزایش یافت.
مطالعات قبلی نشان داد که هر دو ارتفاع پایین و بلند پرواز بر دقت DEM تأثیر می گذارد. اثر گنبدی که در ارتفاعات کم رخ می دهد را می توان با افزایش تعداد GCP ها اصلاح کرد [ 47 ]. با این حال، این باعث افزایش هزینه های سرمایه و لجستیک می شود. به جای استفاده از تعداد زیادی GCP، مشکل را می توان با استفاده از یک پلت فرم مجهز به GNSS RTK (Real Time Kinematic) حل کرد، همانطور که در [ 49 ] و متعاقباً در [ 50 ] نشان داده شده است. نتایج نشان داده شده توسط Gómez-Candón و همکاران. [ 44 ] را می توان با استفاده از تعداد زیادی GCP توضیح داد.
از این نظر، لازم است برای کارایی و زمان، حداقل ارتفاعی تعریف شود که در آن یک مقدار GSD برای تشخیص جزئیات سطح مورد نظر تضمین شود. علاوه بر این، نوع پلت فرم نیز باید در نظر گرفته شود. سینگ و فریزر [ 39 ] در نظر گرفتند که حداقل واحد نقشه برداری (MMU) باید در تصمیم گیری های مربوط به تفکیک فضایی در نظر گرفته شود. MMU ممکن است به محققان کمک کند تا حجم داده ها و هزینه های پردازش را برای تعیین مناسب ترین GSD برای محصولات خروجی متعادل کنند. مطابق جدول 2ارتفاع بهینه پرواز باید بین 70 تا 150 متر باشد. بنابراین، میانگین RMSE عمودی 2 × GSD گزارش شد. در مورد حداکثر ارتفاع باید ارتفاعی انتخاب شود که کیفیت ابر نقطه سه بعدی از بین نرود و حداکثر ارتفاع پرواز مجاز در کشور در نظر گرفته شود.
3.2. همپوشانی تصویر
در پروازهای فتوگرامتری معمولی، معمولاً همپوشانی جلو بین 55 تا 60 درصد و همپوشانی جانبی 15 تا 25 درصد توصیه می شود. با این حال، تصاویر پهپاد باید درصد بالایی از همپوشانی داشته باشند تا پردازش فتوگرامتری تصاویر بتواند به طور بالقوه از افزونگی حاصل بهره مند شود، که همچنان امکان تولید ابرهای نقطه سه بعدی با کیفیت بالا از تطابق چند تصویری متراکم را فراهم می کند [ 51 ].
بین همپوشانی تصویر و دقت مدل های ارتفاعی دیجیتال (DEM) رابطه مثبت وجود دارد. دقت با افزایش درصد همپوشانی افزایش می یابد و شکل جسم بهینه می شود [ 52 ]. نرم افزار فتوگرامتری مانند Agisoft Metashape توصیه می کند که تصاویر پهپاد تقریباً با 80% همپوشانی جلو و 60% همپوشانی جانبی به دست آید [ 53 ]. Pix4D حداقل 75٪ همپوشانی جلو و 60٪ همپوشانی جانبی را پیشنهاد می کند [ 54 ]. به طور کلی، همپوشانی جلو برابر یا بیشتر از همپوشانی جانبی است.
با این حال، با همپوشانی های اغراق آمیز، دید استریوسکوپی در بازسازی فتوگرامتری از بین می رود و زمان پردازش بدون بهبود کیفیت محصولات نهایی افزایش می یابد. همپوشانی بیش از 90 درصد می تواند تغییر شکل هایی را در مدل دیجیتال ایجاد کند – به عنوان مثال، [ 11 ]. از این نظر، برای بررسی های توپوگرافی و تولید DTM استفاده از همپوشانی های جلو بین 70 تا 90 درصد و همپوشانی های جانبی 60 تا 80 درصد توصیه می شود. هرچه AGL کمتر باشد، همپوشانی باید به حد بالایی نزدیکتر باشد.
3.3. سرعت پهپاد
سرعت پرواز پهپاد یک پارامتر تعیینشده توسط کاربر است زیرا بر کیفیت تصویر و مصرف انرژی پهپاد تأثیر میگذارد. با این حال، با توجه به اهمیت آن در تعیین دقت DEM، مطالعات سرعت پرواز پهپاد را با جزئیات کافی در نظر نگرفتهاند. برخی تحقیقات برای تعیین سرعت بهینه با توجه به واحد مصرف انرژی فاصله [ 55 ] انجام شده است و برخی دیگر اثر باد را برای انتخاب سرعت بهینه اضافه کردند [ 56 ].
چندین متغیر انتخاب سرعت پرواز پهپاد را تعریف می کنند. از جمله آنها می توان به حداکثر سرعت پرواز پهپاد توصیه شده توسط سازنده، سرعت و جهت باد، سرعت شاتر دوربین و محدودیت های عملیاتی کشور اشاره کرد. شرایط باد به طور قابل ملاحظه ای بر ابرهای نقطه سه بعدی و DEM هایی که مطالعه نشده اند تأثیر می گذارد. سرعت باد زیاد پهپاد را به شدت کج می کند و به زوایای زمین و چرخش بزرگ منجر می شود. آنها همچنین باعث می شوند پهپاد از قدرت بیشتری در طول پرواز استفاده کند و به طور کلی پایداری پهپاد را کاهش دهد [ 57 ].
بنابراین، سرعت پرواز باید با در نظر گرفتن حداکثر سرعت باد که سکو در آن حساس است، برنامه ریزی شود. سرعت شاتر ارتباط نزدیکی با سرعت پرواز دارد. راث و همکاران [ 58 ] مشخص کرد که تنظیمات اشتباه سرعت شاتر یکی از دلایل مهم تاری حرکت است. زمان شاتر طولانی، همراه با سرعت پرواز سریع، ممکن است باعث تاری حرکت شود. یک گزینه برای کاهش تاری حرکت این است که پهپاد برای گرفتن تصویر متوقف شود. با این حال، این باعث مصرف انرژی بیشتر می شود و بنابراین، منطقه بررسی برای هر استفاده از باتری کاهش می یابد.
سرعت پرواز مورد نیاز کاربر باید به کیفیت مورد انتظار تصاویر مرتبط باشد. بنابراین، راث و همکاران. [ 58 ] معادله (3) پیشنهاد شده است که در آن سرعت پرواز بر اساس حداکثر تاری حرکت قابل تحمل انتخاب میشود و توصیه میشود تاری حرکت (معمولاً به صورت درصدی از اندازه یک پیکسل نشان داده میشود) تا حد امکان پایین باشد، اما حداقل کمتر از 50 باشد. ٪. برای حدود این معادله باید به سند مراجعه کرد. با این حال، سایر متغیرهای ذکر شده در بالا نیز باید در نظر گرفته شوند.
که در آن S سرعت پهپاد (m/s) است. δ حداکثر تاری حرکت (px) است. و l t سرعت شاتر (s) است.
3.4. جهت گیری خطوط پرواز و پیکربندی دوربین
به طور کلی، نقشه های پرواز به صورت خطوط پروازی موازی (الگوهایی مانند رفت و برگشت و مارپیچ) در ارتفاع پایدار با همپوشانی ثابت و زاویه دوربین رو به نادر برای دستیابی به پوشش استریوسکوپی منظم در طول خط پرواز طراحی می شوند. این پیکربندی به طور سنتی به عنوان مؤثرترین برای به دست آوردن، به ویژه در زمان و سادگی در نظر گرفته شده است. با تعیین چند پارامتر اصلی پرواز در نرم افزار برنامه ریزی پرواز می توان آن را به صورت خودکار تولید کرد. با این حال، بلوکهای تصویر شبکهبندیشده با جهت نگاه واحد، معمولاً جزئیات یا اطلاعات هندسی کافی را در صحنههای پیچیدهتر ثبت نمیکنند و باعث میشوند که ابر نقطه حاصل به دلیل تجمع خطا در فرآیند SfM، حاوی گنبد مصنوعی باشد – به عنوان مثال، [ 59 ].
بنابراین، پیکربندیهای پروازی مختلفی برای کاهش خطاهای سیستماتیک گنبد و افزایش دقت DEMها، مانند مأموریتهای تک شبکهای تکمیل شده با تصاویر مایل یا با طرح پرواز قوس، مأموریتهای شبکه دوگانه (با به دست آوردن تصاویر عمودی یا مایل) مورد مطالعه قرار گرفتهاند. یا هر دو) یا ارتفاعات مختلف پرواز در یک برنامه پروازی. علی و عابد [ 60 ] از دو نوع پیکربندی پرواز (ماموریت یک شبکه و دو شبکه) برای به دست آوردن تصاویر عمودی در دو ارتفاع مختلف (100 و 120 متر) استفاده کردند و RMSE z بالاتری را در DEM پیدا کردند که با شبکه دوگانه تولید میشد. ماموریت
جیمز و رابسون [ 61 ] نشان دادند که تقویت بلوک تصویر با مجموعهای از خطوط پروازی اضافی در یک سمت آزیموت متفاوت، تغییر شکل سیستماتیک DEM را به طور قابلتوجهی کاهش نمیدهد. Sanz-Ablanedo و همکاران. [ 62 ] نشان داد که تنها نتایج میانی زمانی به دست میآیند که طرحهای پروازی مختلف که فقط تصاویر عمودی را شامل میشدند مخلوط شوند. دقت DEM زمانی که تصاویر مایل و عمودی ادغام می شوند در مقایسه با استفاده از تصاویر عمودی [ 52 ] بهتر است، زیرا تخمین پارامترهای جهت گیری بیرونی و داخلی (طبق [ 50 ]) تصاویر هوابرد در کالیبراسیون خود بهبود یافته است. .
Nesbit و Hugenholtz [ 63 ] دریافتند که ترکیب تصاویر مایل با زوایای شیب 15-35 درجه به طور کلی دقت را افزایش می دهد و مجموعه تصاویر تک زاویه در زوایای مایل بالاتر (30-35 درجه) می تواند نتایج قابل اعتمادی ایجاد کند اگر مجموعه داده های ترکیبی امکان پذیر نباشد. . استفاده از تصاویر مایل به ویژه در زمین های تپه ای با توپوگرافی ناهموار و برآمدگی ها یا برای بررسی دیوارهای زیر عمودی مناسب است [ 14 ، 42 ].
بنابراین، تصاویر باید در پرواز از پیش برنامه ریزی شده با استفاده از حالت عکاسی خودکار پیوسته [ 11 ] به دست آیند. خطوط پرواز باید به برنامه های پرواز سنتی (الگوهایی مانند رفت و برگشت و مارپیچ) اضافه شود تا تصاویر مایل ثبت شود. درست است که ترکیب تصاویر عمودی (نادیر) و مایل به زمان بیشتری نیاز دارد. با این حال، نتیجه یک ابر نقطه سه بعدی با کیفیت بالاتر است.
جهت خطوط پروازی باید بر اساس مورفولوژی زمین باشد. در سطوح مستطیل شکل، راحت ترین حالت برای پرواز است که با طولانی ترین ضلع مستطیل موازی باشد ( شکل 3 ). مشخصات دوربین در جدول 3 نشان داده شده است.
3.5. ارجاع جغرافیایی، GCPها و CPها
برای تضمین درجه خاصی از دقت در مدلهای دیجیتال با استفاده از فتوگرامتری UAV، ممکن است لازم باشد GCPها جمعآوری شوند. این نقاط می توانند ویژگی های دائمی زمین یا اهداف مرجع پراکنده بر روی زمین باشند، که باید بررسی شوند تا مختصات دقیق آنها به دست آید و اطمینان حاصل شود که آنها روی تصاویر خام قابل شناسایی هستند [ 64 ]]. علاوه بر این، تعداد GCP های بررسی شده باید شامل نقاط چک اضافی (CPs) نیز باشد که برای ارزیابی کیفیت داده های حاصل استفاده می شود. GCPها برای ارجاع جغرافیایی ابر نقطه سه بعدی و برای بهبود تخمین پارامترهای جهت گیری داخلی و خارجی در فرآیند SfM استفاده می شوند. در همان زمان، دقت DEM با مقایسه مقادیر مختصات CP ها که در راه حل مثلث بندی هوایی محاسبه می شود با مختصات CP های بررسی شده ارزیابی می شود.
یکی از مشکلاتی که معمولاً در فتوگرامتری پهپاد به وجود می آید، تعداد GCPهایی است که باید برای دستیابی به دقت مورد نظر ایجاد شود. به طور گسترده تشخیص داده شده است که هرچه GCP های بیشتری استفاده شود، دقت نتیجه بهتری خواهد داشت. با این حال، هنگام افزایش تعداد GCP ها تا رسیدن به تراکم خاصی از GCP ها، دقت می تواند به طور مجانبی افزایش یابد [ 46 ، 65 ]. علاوه بر این، ایجاد تعداد زیادی از نقاط زمان بر است و ممکن است بسیاری از مزایای هزینه نقشه برداری با استفاده از پهپاد را از بین ببرد [ 32 ].
در عمل، معمولاً GCPهای بسیار بیشتر از حداقل مورد نیاز ایجاد میشوند و توصیههای متفاوتی برای تعداد GCPها در کارهای مختلف گزارش شدهاند ( جدول 4 ). Tahar [ 66 ] دریافت که ایجاد حداقل هفت GCP در یک سطح معین ضروری است. نویسنده بین 4 تا 12 GCP استفاده کرد و RMSE عمودی در مدلهای دیجیتال پس از استفاده از هفت یا بیشتر GCP کاهش یافت. Jiménez-Jiménez و همکاران. [ 67 ] دریافتند که حداقل پنج GCP توزیع شده در سراسر منطقه مورد مطالعه ضروری هستند. برای به دست آوردن مقادیر RMSE عمودی نزدیک به 3 × GSD لازم است برای هر 3 هکتار یک GCP ایجاد شود. مساحت زمین مورد مطالعه در آن تحقیق حدود 37 هکتار و تقریباً مستطیل شکل بود.
کاونی و رابرتز [ 68 ] گزارش کردند، در مطالعهای که بر روی 29 هکتار از پارک شهری با مورفولوژی زمین هموار انجام شد، خطاهای (RMSE عمودی) حدود 2 × GSD را میتوان در هنگام استفاده از یک GCP برای هر 2 هکتار از زمین به دست آورد. استفاده از GCPهای بیشتر نتایج یکسانی را تولید کرد در حالی که در یک سایت مطالعه 17 هکتاری که مورفولوژی آن شامل طیف وسیعی از مقادیر شیب بود، Martínez-Carricondo و همکاران. [ 69 ] دریافتند که RMSE عمودی در حدود 1.6 × GSD را می توان با استفاده از یک GCP با توزیع طبقه بندی شده برای هر هکتار به دست آورد. سانتیس و همکاران [ 70 ] دریافت که یک RMSE عمودی در حدود 1.3 × GSD را می توان با تقریباً 1 GCP در هکتار (28 GCP در 25 هکتار) به دست آورد.
این توصیهها از 0.3 تا 1.0 GCP در هکتار برای به دست آوردن یک RMSE عمودی بین 1-3 × GSD متغیر است. داده های فوق و سایر مطالعات گزارش شده در ادبیات [ 39 ] نشان داد که تعداد GCPهایی که باید در واحد سطح ایجاد شوند، حداقل برای همه انواع مورفولوژی و اندازه منطقه هنوز مشخص نیست. بنابراین، مطالعات مختلفی با رویکردی متفاوت ایجاد شده است. Sanz-Ablanedo و همکاران. [ 30] تعداد GCP ها را در هر 100 تصویر به دست آمده با پهپاد مرتبط کرد و دریافت که مقادیر RMSE عمودی 2 × GSD را می توان با دو یا چند GCP در هر 100 تصویر به دست آورد. مقادیر RMSE عمودی را نیز می توان با استفاده از چهار GCP در هر 100 تصویر به 1.5 × GSD ارتقا داد. آنها همچنین مقادیر افقی RMSE مشابه ± یک GSD با تقریباً 2.5 تا 3 GCP در هر 100 تصویر را یافتند. به نظر میرسد این معیارها برای تعریف تعداد GCPهای مورد استفاده، تخمینگر خوبی باشند، زیرا شامل AGL، همپوشانی تصویر، جهتگیری خطوط پرواز و پیکربندی دوربین میشوند.
توزیع GCP ها نیز بر دقت DEM تأثیر می گذارد. هنگامی که GCP ها به خوبی توزیع نشده اند، ممکن است هنگام افزایش تعداد GCP ها، دقت کمی کاهش یابد. توزیع های مختلف GCP ها برای بهینه سازی محصولات به دست آمده توسط فتوگرامتری پهپاد مورد مطالعه قرار گرفته است ( جدول 5 ). هاروین و لوسییر (2012) [ 72 ] توصیه کردند که GCPها در سرتاسر ناحیه تمرکز توزیع شده و با تسکین تطبیق داده شوند و در نتیجه GCPهای بیشتری در زمین های شیب دارتر ایجاد شود.
رنگل و همکاران [ 9 ] مطالعه ای را روی 270 هکتار با استفاده از سیزده پیکربندی مختلف از تعداد و توزیع GCPها انجام داد و به این نتیجه رسید که قرار دادن GCPs در قسمت مرکزی بلوک به طور قابل توجهی به افزایش دقت افقی محصولات جغرافیایی کمک نمی کند. . برای دستیابی به نتایج بهینه در مورد پلان سنجی، GCPها باید در لبه منطقه مورد مطالعه با تفکیک افقی 7 تا 8 واحد پایه زمینی (فاصله افقی بین مراکز دو تصویر متوالی) قرار گیرند. نتایج مشابهی در Martínez-Carricondo و همکاران گزارش شده است. [ 69]. طبق گفته Martínez-Carricondo و همکاران، GCPها باید در قسمت مرکزی منطقه با جداسازی افقی 3 تا 4 واحد پایه زمینی با توزیع طبقه بندی شده برای افزایش دقت ارتفاعی اضافه شوند. [ 69 ].
مطالعات ارجاع شده بر روی زمین مربع یا مستطیل شکل توسعه یافته است. با این حال، ممکن است برای به دست آوردن توپوگرافی سایت (DTM) که در آن یک بعد بسیار بزرگتر از دیگری است، مانند جاده ها، توزیع خطی برق، خطوط لوله و کانال ها، مطالعات خاص تری لازم باشد. بنابراین، نمی توان تضمین کرد که نتایج حاصل از مطالعات ذکر شده در بالا می تواند در این سایت ها اعمال شود. برای این نوع سایت ها، Ferrer-González et al. [ 64 ] استفاده از 4 تا 5 GCP در کیلومتر را توصیه میکند که به طور متناوب در هر دو طرف کار خطی به صورت افست یا زیگزاگی، با یک جفت GCP در هر انتها توزیع شده است.
GCP ها تنها گزینه برای ارجاع جغرافیایی نیستند. در سالهای اخیر، جایگزینی برای ارجاع جغرافیایی با استفاده از GCP (مقایسه جغرافیایی غیرمستقیم) به عنوان ارجاع جغرافیایی مستقیم با استفاده از یک پلت فرم با گیرنده GNSS/RTK درجه نظرسنجی (RTK UAV) پدیدار شد. هوگنهولتز و همکاران [ 29 ] از این دو نوع ارجاع جغرافیایی برای دستیابی به یک RMSE افقی مشابه استفاده کرد. با این حال، مقادیر RMSE عمودی دو تا سه برابر با ارجاع جغرافیایی مستقیم بیشتر بود. آنها به این نتیجه رسیدند که در برنامه هایی که به RMSE عمودی بهتر از ± 0.12 متر نیاز دارند، GCP ها باید به جای یک پلت فرم GNSS/RTK استفاده شوند. Štroner و همکاران. [ 49 ] نشان داد که، با این پلتفرمها، دقت عمودی میتواند تا سطح دقت 1-2 × GSD با استفاده از تعداد کمی GCP (حداقل یک) بهبود یابد. تادیا و همکاران [ 73] دریافت که هنگام استفاده از تصاویر عمودی و مایل در بلوک فتوگرامتری (بدون GCP)، می توان دقت هایی مشابه DTM های ارجاع شده با GCP ها را بدست آورد. مشخص نیست که آیا ارجاع جغرافیایی مستقیم جایگزین GCPها می شود تا به تکنیک مرجع استاندارد برای بلوک های پهپاد تبدیل شود. با این حال، با ظهور پلتفرمهای کمهزینه (مثلاً DJI Phantom 4 RTK)، استفاده بهویژه در مناطق بزرگ یا با دسترسی دشوار، یا جایی که بررسی GCPها پیچیده است، افزایش مییابد.
در مورد CP ها، در مورد حجم نمونه اتفاق نظر وجود ندارد. با این حال، استاندارد ملی دقت نقشه (NMAS) و استاندارد ملی برای دقت داده های مکانی (NSSDA) حداقل 20 CP را توصیه می کنند. در مقابل، استانداردهای دقت موقعیتی ASPRS برای دادههای مکانی دیجیتال، تعداد CP را بر اساس مساحت توصیه میکند و نشان میدهد که در هیچ موردی، دقت عمودی زمین بدون پوشش گیاهی نباید بر اساس کمتر از 25 CP باشد. CP ها باید به صورت متراکم تر، نزدیک به ویژگی های اساسی، و با صرفه جویی در مناطق کم یا بدون علاقه توزیع شوند.
4. فتوگرامتری DTM Generation
الگوریتم های SfM تولید مدل های توپوگرافی دقیق از تصاویر جمع آوری شده با پهپادها را تسهیل می کند. محصول اولیه فرآیند SfM یک ابر نقطه سه بعدی از ویژگی های قابل شناسایی موجود در تصاویر ورودی است. بعداً می توان یک DEM (DSM یا DTM) و یک ارتوموزائیک ژئوارفرانسی تولید کرد.
4.1. نرم افزار
طیف وسیعی از بسته های نرم افزاری با استفاده از رویکرد SfM وجود دارد که در حال حاضر به اندازه کافی قدرتمند و کارآمد هستند تا با مجموعه بزرگی از تصاویر کار کنند و به طور خودکار نتایج را در زمان نسبتاً کوتاهی ارائه می دهند. آنها به عنوان بسته های دسکتاپ، مانند Agisoft MetaShape (سابق PhotoScan)، Pix4D، PhotoModeler، SimActive CORRELATOR3D، Inpho UASMaster، MicMac، VisualSfM، Bundler، CMVS، و همچنین راه حل های پردازش آنلاین، مانند DroneDeploy و غیره گنجانده شده اند.
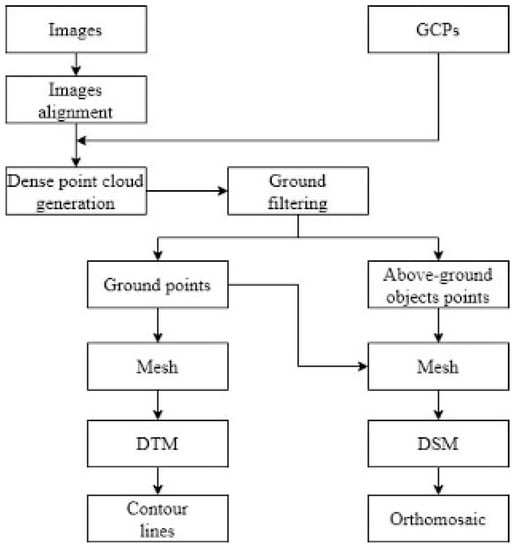
این نرم افزارها از یک گردش کار کلی با برخی از مراحل پردازش داده پیروی می کنند ( شکل 4 ). این مراحل شامل (1) وارد کردن تصاویر به نرم افزار، (2) هم ترازی بین تصاویر همپوشانی، (3) ارجاع جغرافیایی تصاویر با استفاده از GCP برای بهینه سازی موقعیت و جهت دوربین، (4) تولید ابر نقطه متراکم شبکه سه بعدی، (5) فیلتر کردن زمین با یا بدون نقاط اجسام بالای زمین، (6) حذف یا حفظ اشیاء کاملا طبیعی (پوشش گیاهی) یا ساخته شده (ساختمان، خانه ها و غیره) روی زمین از ابر نقطه متراکم، (7) اگر اشیاء فوق با حذف یک مش، یک DTM ایجاد می شود، و (8) اگر اشیاء فوق در ابر نقطه متراکم نگه داشته شوند، یک DSM و orthmosaic ایجاد می شود.
حتی اگر نرم افزار بتواند به طور خودکار نتایج را ارائه دهد، مداخله اپراتور برای مراحل خاصی از پردازش داده ها ضروری است، به ویژه برای بررسی صحت تراز و حذف نقاط متعلق به اشیاء بالای زمین برای بازیابی نقاط زمین برای تولید DTM [ 5 ].
مطالعات مختلف عملکرد نرم افزارهای مختلف فتوگرامتری را مقایسه کردند. کازلا و همکاران [ 74 ] پنج بسته نرم افزاری را مقایسه کرد. آنها نتایج مشابهی (RMSE) در اجزای افقی و عمودی برای PhotoScan، Pix4D، UAS Master و MicMac پیدا کردند، در حالی که ContextCapture نتایج مشابهی را فقط برای مؤلفه افقی نشان داد. Sanz-Ablanedo و همکاران. [ 62 ] عملکرد PhotoScan و Pix4D را ارزیابی کرد و نتایج مشابهی را برای طراحی های مختلف پرواز یافت. جاود و همکاران [ 75] دریافت که MicMac و Photoscan (Metashape) خطاهای افقی و عمودی مشابهی را در یک منطقه کنترل (GCPs محدود شده) ارائه می دهند. PhotoScan جزئیات توپوگرافی را بهتر از MicMac بازسازی کرد، به ویژه در سطوحی که شیب قابل توجهی در خارج از منطقه کنترل وجود دارد. سونا و همکاران [ 76 ] دریافت که PhotoScan عملکرد خوبی را به خصوص در مناطق صاف و در حضور سایه ها ارائه می دهد. حرفه ای ها معمولاً از نرم افزارهای دسکتاپ مانند PhotoScan، Pix4D و Photomodeler استفاده می کنند، زیرا استفاده از آنها ساده تر است. با این حال، بیشتر پردازش در مدل جعبه سیاه انجام می شود. بسیاری از کاربران از نرم افزارهای منبع باز (مانند MicMac، ColMap یا AliceVision) استفاده می کنند، زیرا انعطاف پذیرتر هستند اما برای کاربران با تجربه توصیه می شوند.
4.2. تراز تصویر و تولید ابر نقطه متراکم
در مرحله اول پردازش داده ها، تصاویر وارد می شوند. برای کاهش زمان پردازش تصاویر با فرمت DNG، Alfio و همکارانش. [ 77 ] دریافتند که بهترین نوع مجموعه داده برای حفظ کیفیت فرآیند فتوگرامتری (به دست آمده با تصاویر در فرمت DNG) استفاده از تصاویر JPEG با سطح فشرده سازی 12 است.
در مرحله بعدی، SfM تصاویر را با حل معادلات همخطی در یک سیستم مختصات با مقیاس دلخواه بدون هیچ نیاز اولیه اطلاعات خارجی (مکان دوربین و نگرش یا GCPs) تراز میکند [ 74 ]. بسته های نرم افزاری معمولاً به طور خودکار نقاط کلیدی را در هر تصویر ایجاد می کنند. تعداد نقاط کلیدی در یک تصویر در درجه اول به بافت و وضوح تصویر بستگی دارد، به طوری که تصاویر پیچیده با وضوح بالا بیشترین نتایج را به دست خواهند آورد [ 6 ]. بعداً، نقاط کلیدی منطبق شناسایی میشوند و موارد منطبق بر هم حذف میشوند.
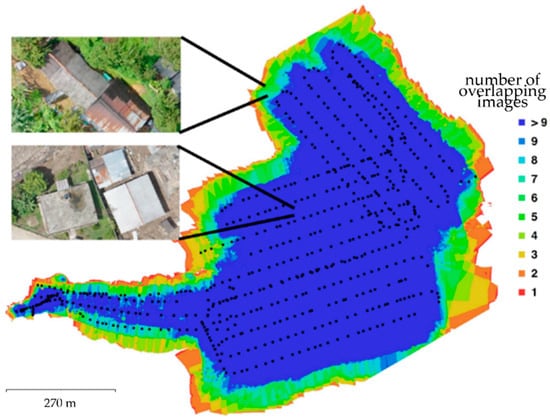
یک الگوریتم تنظیم بسته نرم افزاری برای حل همزمان هندسه سه بعدی صحنه، موقعیت های مختلف دوربین و پارامترهای دوربین استفاده می شود [ 74 ]. خروجی این مرحله یک ابر نقطه پراکنده است که در یک سیستم مختصات نسبی «فضای تصویر» تولید شده است. تعداد تصاویر همپوشانی که پس از تراز ایجاد می شود در سراسر منطقه ثابت نیست، زیرا در نزدیکی لبه ها، تصاویر کمتری با هم تداخل دارند در مقایسه با ناحیه مرکزی ( شکل 5 ). این ناهماهنگی باعث می شود اندازه گیری های انجام شده در این مناطق نسبت به اندازه گیری های انجام شده در نواحی مرکزی دقت کمتری داشته باشند. بنابراین، منطقه وسیع تری باید در مقایسه با منطقه مورد علاقه واقعی پوشش داده شود. این ناهماهنگی در لبه های تار و روی هم افتاده خانه ها نشان داده شده در تصویر بالا نشان داده شده است.شکل 3 .
متعاقباً مختصات GCP وارد شده و به صورت دستی در تصاویر شناسایی می شوند. در حال حاضر امکان استفاده از شناسایی خودکار اهداف عادی و کد نیز وجود دارد. اهداف کد به طور گسترده ای در تولید DTM استفاده نمی شوند، زیرا اهداف باید بسیار بزرگ باشند تا الگو را تشخیص دهند (مثلاً اهداف کدگذاری شده گرد شده، کدهای QR Pix4D). مختصات GCPs برای تبدیل مختصات فضای تصویر SfM به یک سیستم مختصات مطلق استفاده می شود [ 6 ].
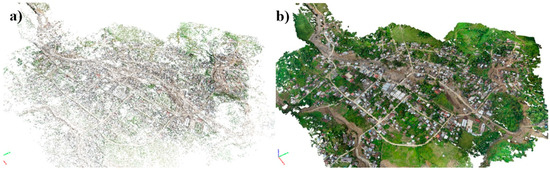
بعداً، الگوریتمهای تطبیق تصویر استریو چند نما برای افزایش تراکم ابرهای نقطه پراکنده و ایجاد یک ابر نقطه سه بعدی متراکم اعمال میشوند ( شکل 6 ). به طور کلی، پارامترهای مختلف کیفیت ابر در نرم افزار فتوگرامتری برای ساخت یک ابر متراکم موجود است. این پارامتر بر دقت DEM نهایی – به عنوان مثال، [ 65 ] – و وضوح – به عنوان مثال، [ 23 ] تاثیر می گذارد. هر چه کیفیت پایین تر باشد، وضوح مکانی و دقت DEM کمتر است. بنابراین، در صورت نیاز به کیفیت و دقت بالا، ورودی با کیفیت بالا توصیه می شود. با این حال، این نیاز به زمان پردازش بیشتری دارد.
چگالی بالا (نقطه در متر مربع ) در یک ابر نقطه متراکم را می توان با فتوگرامتری پهپاد بدست آورد. نوع سکو و دوربین، پارامترهای برنامه ریزی پرواز و کیفیت پردازش تصویر بر این تراکم نقاط تأثیر می گذارد. این چگالیهای نقطهای ممکن است مشابه یا کمتر با آنچه که توسط TLS ایجاد میشود، باشد. با این حال، برای بسیاری از کاربردها، چگالی نقطه ای کمی کمتر تولید شده توسط فتوگرامتری پهپاد ممکن است از هزینه هنگفت سیستم های TLS بیشتر باشد [ 78 ]. چگالی نقطه ای تولید شده با فتوگرامتری پهپاد به سختی می تواند همزمان با یک بررسی زمینی سنتی با استفاده از یک TS به دست آید – به عنوان مثال، [ 18 ].
4.3. فیلتر زمین و تولید DTM
تولید DTM در بسیاری از کاربردها ضروری است که شکل سطح زمین را پس از حذف عناصر خارجی مانند پوشش گیاهی و ساختمان ها بازسازی می کنند. بنابراین، برای استخراج DTM، ابرهای نقطه ای از مدل سطح دیجیتال (DSM) باید فیلتر شوند تا نقاط غیرزمینی حذف شوند، که به آن فیلتر زمین [ 5 ] می گویند. فیلتر زمین یک مرحله حیاتی در فرآیند بازیابی برای نمایش دقیق ویژگی های توپوگرافی سطح زمین است و در نرم افزارهای تجاری، در حال تبدیل شدن به یک تابع استاندارد است [ 79 ].
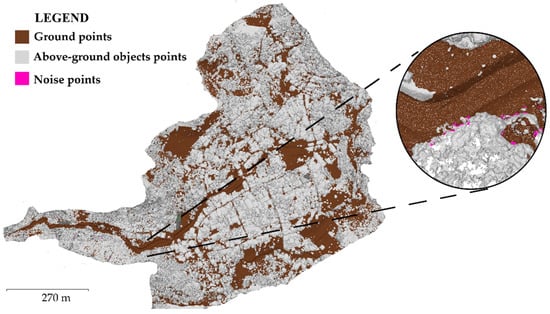
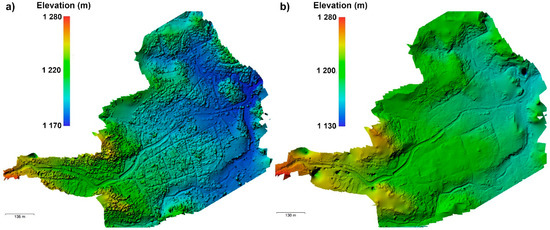
فیلتر زمین پس از ایجاد یک ابر نقطه 3 بعدی متراکم انجام می شود و نقاط به نقاط زمین و نقاط متعلق به اجسام بالای زمین طبقه بندی می شوند ( شکل 7 ). پس از آن، DTM ( شکل 8 ) با درونیابی نقاط زمین متعلق به سطح زمین برهنه تولید می شود. پس از طبقه بندی ابر نقاط متراکم، نقاط نویز را می توان پیدا کرد و باید به صورت دستی حذف شوند. به طور معمول، نقاط نویز بسیار بالاتر یا کمتر از حد انتظار هستند و هیچ ویژگی واقعی زمین را نشان نمی دهند.
بسیاری از نرم افزارهای تجاری و غیر تجاری ابزاری برای طبقه بندی ابر نقطه متراکم و انجام فیلتر زمین دارند. به عنوان مثال، Agisoft PhotoScan Professional فیلتر زمین را با استفاده از الگوریتم شبکه نامنظم مثلثی تطبیقی انجام می دهد و نرم افزار Pix4D از یک رویکرد مبتنی بر شطرنجی متغیر استفاده می کند. با این حال، هر دو میتوانند با طبقهبندی اشتباه پوشش گیاهی زمین [ 80 ] یا گیجکردن سطح خاک برای سطح جسم، خطاهایی را در DTM ایجاد کنند. به طور کلی، روشهای فیلتر کردن در زمینهایی که دارای اشیاء بالای زمینی هستند، خطاهای بیشتری را مرتکب میشوند. بنابراین، فیلتر زمین باید نظارت شود و اغلب به صورت دستی اصلاح شود.
گزارش شده است که فیلتر کردن شبیهسازی پارچه یکی از دقیقترین الگوریتمها برای خودکارسازی فیلتر زمین بر روی ابرهای نقطهای سه بعدی بهدستآمده از فتوگرامتری است [ 1 ]. کارایی این الگوریتم و سایر الگوریتمهای موجود بهبود یافته است و الگوریتمهای جدیدی پیشنهاد شدهاند که نتایج مطمئنتر و دقیقتری ارائه میدهند.
با پیشرفت تکنولوژی و دانش، انتظار میرود کارایی این الگوریتمها همچنان بهبود یابد تا بتوان به صورت خودکار DTMهایی با کیفیت بالاتر و دقیقتر به دست آورد تا زمان صرف شده در نظارت و اصلاح فیلتر زمین کاهش یابد. فیلتر زمین اجازه می دهد تا تولید DTM به صورت خودکار انجام شود و فتوگرامتری را جایگزینی برای جلوگیری از هزینه های بالا در هنگام استفاده از فناوری هایی مانند LiDAR در برنامه های نقشه برداری خاص می کند [ 81 ].
فتوگرامتری پهپاد همچنین میتواند ارتوموزائیکهای ژئوارفرانسی تولید کند، جایی که میتوان جزئیات زمین را مشاهده کرد. این ارتوموزائیک ها می توانند اطلاعات بیشتری را برای بررسی توپوگرافی فراهم کنند. ارتوموزائیک چندین مزیت را در بررسی های توپوگرافی ارائه می دهد که به طور دقیق مورد تجزیه و تحلیل قرار نگرفته است.
5. ژئومورفولوژی و کاربری زمین / پوشش
الگوهای توپوگرافی و کاربری زمین (پوشش زمین) ویژگی های اصلی محیط فیزیکی هستند که دقت و کیفیت عمودی یک DTM را تعیین می کنند. برای تولید DTM، فتوگرامتری پهپاد دارای مزیت های رقابتی در مناطق بررسی زمین های بایر یا مناطقی با پوشش گیاهی منزوی یا کم، در پروژه های کمی سازی حجم پر و حفاری کارهای خاکی، در تخمین شیب زمین یا نظارت بر تغییرات ارتفاع، در کاربردهای منطقه محلی است. و به خصوص اگر جمع آوری داده های تکراری مورد نیاز باشد [ 11 ]. با این حال، وجود پوشش گیاهی می تواند دقت و کیفیت عمودی DTM را کاهش دهد.
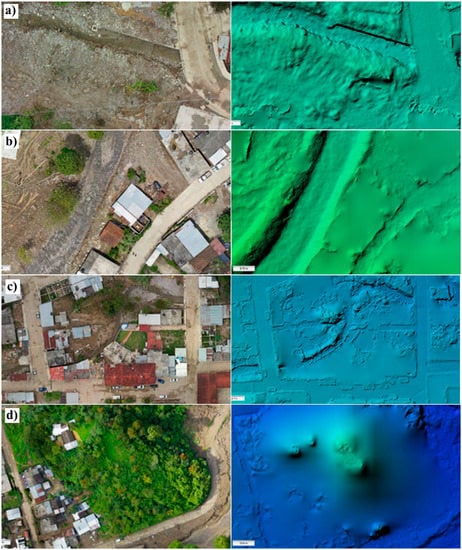
این وضعیت را می توان به راحتی با ماهیت غیرفعال حسگر نوری در تصاویری که نمی توانند به پوشش گیاهی نفوذ کنند توضیح داد. بنابراین، تاثیر پوشش گیاهی بر مدل ایجاد شده را نمی توان حتی با الگوریتم های فیلتر زمین حذف کرد. این ملاحظات به ویژه در مناطقی با مورفولوژی پیچیده مهم است ( شکل 9 ) که در آن ابر نقطه ای حاصل، نقاط زمینی بسیار کمی در زیر پوشش گیاهی خواهد داشت و یک DTM با کیفیت بالا نمی تواند تولید شود. سالاچ و همکاران [ 79] با مشاهده کاهش دقت عمودی 0.10 متر برای هر 20 سانتی متر ارتفاع پوشش گیاهی، افزایش تدریجی خطای DTM را نشان داد. در سطوحی با پوشش گیاهی پیچیده، ممکن است نتوان نقاط زمینی را به دست آورد که امکان مثلث بندی نقطه زمین برای تولید DTM مناسب را فراهم می کند.
علاوه بر این، خاطرنشان می شود که روش فتوگرامتری در مناطقی با بافت همگن به درستی عمل نمی کند و در نتیجه حفره ها، مصنوعات یا مناطق پراکنده در ابر نقطه ایجاد می شود [ 2 ]. خطاهای ارتفاع ممکن است در انواع دیگر سطوح نیز ایجاد شود. به عنوان مثال، در زمینی که ساختمان های نزدیک به تپه ها وجود دارد. در این مناطق، ارتفاع در پایه خانه با تپهها درونیابی میشود و باعث میشود که پیکسلهای میانی به اشتباه مقدار ارتفاع بالاتری نسبت داده شوند. این وضعیت عمدتا به دلیل خطای مرتبط با نسل DTM است.
تعداد فزاینده ای از مثال ها با روش های مختلف وجود دارد تا نشان دهد که عمق سنجی را می توان با موفقیت از تصاویر هوایی مربوط به بدنه های آب، کانال ها یا رودخانه ها استخراج کرد. این روشها در شرایط خاصی مانند آبهای شفاف یا آبهای کم عمق قابل اجرا هستند. Westaway و همکاران (2001) [ 82 ] روشی را برای به دست آوردن عمق سنجی در آب شفاف با استفاده از تصاویر هوایی پیشنهاد کرد. این روش با تصاویر پهپاد در کارهای مختلف به کار گرفته شده است – به عنوان مثال، [ 83 ]، اگرچه با افزایش عمق، خطاهای بزرگتری مشاهده شده است. با این حال، در آینده، فتوگرامتری پهپاد ممکن است یک گزینه مناسب برای LiDAR عمق سنجی باشد، که هزینه های آن هنوز بالا است و وضوح نسبتاً ضخیم است.
6. ارزیابی دقت
کیفیت و دقت DTM از متغیرهای زیادی ناشی می شود که می توانند در چهار دسته دسته بندی شوند. دسته اول به اندازه منطقه و مورفولوژی آن [ 45 ]، انواع پوشش زمین [ 79 ]، شرایط نوری (به عنوان مثال، ابری)، و کنتراست رنگ اشیا [ 84 ] مربوط می شود. دسته دوم مربوط به سیستم های جمع آوری داده های پهپاد و ویژگی های آنها، دوربین و کالیبراسیون آن [ 36 ]، و نوع پلت فرم (مولتیکوپتر یا بال ثابت) است که می تواند سکویی با گیرنده GNSS/RTK درجه نظرسنجی باشد [ 29 ]. ].
پارامترهای اکتساب داده و پرواز را می توان در دسته دیگری دسته بندی کرد، از جمله ارتفاع پرواز [ 47 ] و پیکربندی آن [ 42 ، 43 ]، همپوشانی تصویر [ 51 ، 52 ]، سرعت پرواز پهپاد [ 58 ]، الگوی مسیر پرواز. شبکه تک یا دوتایی) [ 60 ، 61 ]، و به دست آوردن تصاویر از نادر یا مایل [ 14 ، 62 ، 63 ]، علاوه بر تعداد GCP ها و توزیع آن [ 30 ، 69 ]]. دسته آخر مربوط به رویکردهای SfM و الگوریتم های خودکارسازی فیلتر زمین از ابر نقطه سه بعدی است [ 1 ].
ارزیابی دقت یک ابر نقطه سه بعدی را می توان به سه روش مختلف انجام داد، به طور کلی، داده ها با یک منبع مستقل دقیق تر مقایسه می شوند. اولین مورد شامل تجزیه و تحلیل باقیمانده از تنظیم بسته نرم افزاری پس از چرخش و مقیاس بندی مدل سه بعدی است. روش دیگر مقایسه مختصات مدل سه بعدی با CP است. روش دیگر با تجزیه و تحلیل باقی مانده های مدل سه بعدی در مقایسه با سطح مرجع است که می توان با استفاده از تکنیک دیگری (به عنوان مثال، TSL) به دست آورد.
در حالت اول، از آنجایی که این روش به اندازه گیری های مستقل نیاز ندارد و از آن استفاده نمی کند، اندازه گیری باید از نظر دقت داخلی به جای دقت تجزیه و تحلیل شود [ 30 ]. مورد سوم گرانترین مورد خواهد بود و میتواند برای مقایسه تکنیکها در یک برنامه خاص مورد استفاده قرار گیرد – به عنوان مثال، [ 21 ، 59 ]. مورد دوم بیشترین استفاده را دارد و در این بخش مورد استفاده قرار خواهد گرفت. CPها باید با GCPها متفاوت باشند، زیرا مدل سه بعدی با GCPها سازگار است و در نتیجه، کمترین باقیمانده همیشه در این نقاط به دست می آید – به عنوان مثال، [ 46 ].
در فتوگرامتری پهپاد، دقت افقی به طور گسترده تشخیص داده شده است که کمی بهتر از دقت عمودی است، به جز توپوگرافی شدید در یک شیب برش نزدیک به عمودی – به عنوان مثال، [ 12 ]. مطالعات مختلف مشاهده کردند که دقت اندازه گیری شده در مقادیر GSD در سطوح صاف در مقایسه با توپوگرافی پیچیده کمتر بود.
برای زمین های مسطح، یک RMSE افقی بین 1 × GSD تا 3 × GSD و یک RMSE عمودی بین 1 × GSD تا 4.5 × GSD در مطالعات مختلف گزارش شده است ( جدول 6 ). برای توپوگرافی پیچیده، یک RMSE افقی بین 1 × GSD تا 7 × GSD و یک RMSE عمودی بین 1.5 × GSD تا 5 × GSD در مطالعات مختلف گزارش شده است ( جدول 7 ). در جدول 5 و جدول 6 ، RMSE به عنوان مضربی از GSD نشان داده شده است، یعنی این سه ستون آخر نشان دهنده دقت به دست آمده در رابطه با GSD هستند. بنابراین، مقایسه مطالعات با GSD های مختلف می تواند مفیدتر باشد.
دقت هندسی در DEM های مشتق شده از فتوگرامتری پهپاد و ارزیابی شده در CP ها معمولاً با مقادیر RMSE مرتبط است (معادلات (4) – (7)). از نظر تئوری، هرچه مقدار RMSE کمتر باشد، DEM دقیق تر است. با این حال، در مطالعات مختلف، شاخصهای دقت دیگری مانند انحراف معیار (به عنوان مثال، [ 48 ، 67 ])، میانگین خطا (به عنوان مثال، MA، [ 47 ، 52 ])، میانگین خطای مطلق یا رگرسیون خطی استفاده شده است.
جیمز و همکاران [ 85 ] نشان داد که تنوع مکانی خطا باید هنگام استفاده از RMSE ارزیابی شود یا زمانی که خطای سیستماتیک و خطای تصادفی قابل شناسایی نیست و نمی توان به اندازه کافی مدیریت کرد. بنابراین، نویسندگان توصیه میکنند که معیارهای خطا را که سوگیری یا دقت را توصیف میکنند (به عنوان مثال، میانگین خطا و تفاوت بین میانگین اندازهگیریها و مقدار واقعی) و مواردی که دقت را توصیف میکنند (به عنوان مثال، انحراف استاندارد خطا).
که در آن RMSE x ، RMSE y ، و RMSE z به ترتیب خطای ریشه میانگین مربع در x ، y و z هستند. RMSE r خطای افقی ریشه میانگین مربع است. xc i ، yc i و zc i مختصات i CP در مجموعه داده هستند. xv i ، yv i ، و zv i مختصات i CP در منبع مستقل با دقت بالاتر هستند. nتعداد چک پوینت های آزمایش شده است. و i یک عدد صحیح از 1 تا n است.
در این معنا، برای ارزیابی دقت DEM، روشهای ارزیابی دقت مختلف استفاده شده است [ 27 ]. استاندارد ASPRS [ 86 ] به انتشار و پذیرش گسترده ای رسیده است و در مطالعات مختلف فتوگرامتری پهپاد استفاده شده است [ 9 ، 32 ]. ASPRS نیز یکی از جدیدترین هاست. این استاندارد کلاسهای دقت افقی (معادله (8)) را بر حسب مقادیر RMSE x و RMSE y تعریف میکند و دقت عمودی با استفاده از آمار RMSE z در زمینهای بدون پوشش گیاهی و آمار صدک 95 در زمینهای پوششدار محاسبه میشود.
دقت در سطح اطمینان 95٪ داده شده است و فرض بر این است که خطاهای مجموعه داده ها به طور معمول توزیع شده اند و هر گونه خطا یا سوگیری سیستماتیک قابل توجه حذف شده است. این دقت به این معنی است که 95٪ از موقعیت های موجود در مجموعه داده دارای خطا در موقعیت زمین واقعی است که برابر یا کوچکتر از مقدار دقت گزارش شده است، و 66.7٪ از داده ها دارای حداکثر خطاهای RMSE هستند. برآوردهای مربوط به دقت در مقادیر سطح اطمینان 95% با استفاده از روشهای NSSDA محاسبه میشوند (معادلات (8) – (10)).
که در آن دقت r دقت افقی در سطح اطمینان 95% است. دقت z دقت عمودی در سطح اطمینان 95% است. NVA به معنای زمین بدون پوشش گیاهی است. و VVA به معنای زمین گیاهی (VVA) است.
7. نتیجه گیری
فتوگرامتری پهپاد یک روش جذاب برای تولید DTM به دلیل الزامات کمتر سختگیرانه در مورد هندسه اکتساب تصویر و سطح بالای اتوماسیون حل هندسی و کالیبراسیون دوربین است. فتوگرامتری پهپاد امکان به دست آوردن DTM با دقت بالا و وضوح فضایی با هزینه کم را فراهم می کند.
نتیجه گیری و توصیه های اصلی حاصل از این کار در زیر ذکر شده است.
7.1. سیستم های جمع آوری داده های پهپاد
(الف) پلت فرم پهپاد: معمولاً پلت فرمی است که ابتدا به دست می آید. با این حال، توصیه می شود یک پلتفرم را بر اساس برنامه مورد نظر انتخاب کنید. نوع پلت فرم تاثیری بر دقت DEM ندارد اما بر کیفیت ابر نقطه تاثیر می گذارد. برای انتخاب نوع سکو، نوع زمین، دسترسی به سایت و شرایط آب و هوایی، از جمله تأثیرات دیگر، باید در نظر گرفته شود.
(ب) کالیبراسیون دوربین: توصیه می شود از خود کالیبراسیون دوربین استفاده کنید و مشخصات توصیف شده توسط لومان و همکاران را دنبال کنید. [ 36 ] برای برآورد دقیقتر پارامترهای کالیبراسیون.
7.2. برنامه ریزی پرواز و جذب تصویر
(الف) ارتفاع پرواز: چندین مطالعه نشان داد که هر دو ارتفاع پایین و بلند پرواز بر دقت و کیفیت DEM تأثیر می گذارد. با توجه به آثار ذکر شده در بخش اسناد، ارتفاع بهینه پرواز باید بین 70 تا 150 متر باشد. اگر یک GSD کوچکتر مورد نظر است، برای به دست آوردن بالاترین دقت DEM، ممکن است GCPهای بیشتری اضافه شود یا تصاویر عمودی و مایل ممکن است برای خنثی کردن اثر گنبدی ترکیب شوند. علاوه بر این، توصیه می شود که ارتفاع پرواز باید به جای حفظ ارتفاع ثابت بالای MSL، با ارتفاع زمین در هر خط پروازی منطبق شود.
(ب) همپوشانی تصویر: برای RGB غیر متریک، دوربین های دیجیتال توصیه می شود از همپوشانی های جلو بین 70 تا 90 درصد و از همپوشانی های جانبی 60 تا 80 درصد استفاده کنند. هرچه AGL کمتر باشد، همپوشانی باید به حد بالایی نزدیکتر باشد.
(ج) سرعت پرواز: این متغیر بر کیفیت تصاویر گرفته شده تأثیر می گذارد. بنابراین لازم است مبنای سرعت را با پیکربندی دوربین و حداکثر تاری حرکتی قابل تحمل همانطور که در رابطه (3) ارائه شده است، تخمین بزنیم.
(د) جهت خطوط پرواز و پیکربندی دوربین: استفاده فقط از تصاویر عمودی توصیه نمی شود. خطوط پرواز نباید فقط به عنوان خطوط پرواز موازی (الگوهایی مانند رفت و برگشت و مارپیچ) طراحی شوند. در عوض، سایر الگوهای پرواز باید همراه با تصاویر عمودی با زوایای شیب 15 تا 35 درجه اضافه شوند. جهت گیری باید بر اساس مورفولوژی زمین باشد. ترکیبی از تصاویر عمودی و مایل باعث بهبود دقت در DTM می شود.
ه) ارجاع جغرافیایی: برای زمین های مسطح با مساحت کمتر از 50 هکتار، برای هر 3 هکتار می توان از یک GCP استفاده کرد. حداقل تعداد مورد استفاده برای یک سطح خاص پنج GCP است. به دلایل پیچیده توپوگرافی یا کارایی، استفاده از دو GCP در هر 100 تصویر توصیه می شود. GCPها باید به صورت طبقه بندی شده هم در لبه و هم در قسمت مرکزی بلوک با تفکیک 3 تا 4 واحد پایه زمینی توزیع شوند. اگر از پلتفرمهای پهپاد RTK استفاده میشود، لازم است حداقل تعداد GCP (حداقل یک عدد) اضافه شود یا تصاویر عمودی و مایل ترکیب شوند تا دقتهایی مشابه با DTMهای georeferenced فقط با GCP بدست آید.
(f) CPها: CPها باید حداقل سه برابر دقیقتر از دقت DTM مورد نیاز [ 86 ] باشند. حداقل 25 CP باید ایجاد شود، متراکم تر و نزدیک به ویژگی های اساسی باشد.
7.3. فتوگرامتری DTM Generation
(الف) نرم افزار: محققان مشاهده کردند که نرم افزار فتوگرامتری بر دقت DEM تأثیری ندارد. بنابراین، نرم افزار باید بر اساس هزینه آن و مهارت کاربر انتخاب شود.
(ب) تولید DTM: برای انجام خودکار فیلتر زمین نیز توصیه می شود. هنگامی که فیلتر زمین به طور خودکار انجام می شود، باید نظارت شود و اغلب به صورت دستی اصلاح شود.
7.4. ژئومورفولوژی و کاربری اراضی / پوشش
با استفاده از فتوگرامتری پهپاد، نمی توان DTM را از انواع سطوح بدست آورد. نقاط زمین باید در ابر نقطه برای مثلث بندی و برای تولید DTM مشاهده شوند. پوشش گیاهی و آب محدودیت اصلی است.
7.5. ارزیابی دقت
به طور کلی، یک RMSE عمودی در محدوده یک تا پنج GSD در مطالعات مختلف گزارش شده است. تخمین دقت فقط بر حسب RMSE توصیه نمی شود، زیرا تغییرات مکانی قابل مشاهده نیست. در هر صورت می توان از استاندارد ASPRS نیز استفاده کرد. سازمانهای دولتی میتوانند محدودیتهای دقت را برای مشخصات محصول و کاربردها و اهداف قراردادی خود تعیین کنند.
با توجه به آنچه قبلاً بیان شد، پهپادها مکمل روشهای بررسی موجود هستند، زیرا محدودیتهای متعددی با استفاده انحصاری از یک پهپاد در نسل DTM ظاهر میشود. علیرغم این محدودیت ها، فتوگرامتری پهپاد پتانسیل بالایی در طیف وسیعی از زمینه های کاربردی دارد.







بدون دیدگاه