1. مقدمه
نقشه برداری جنگل نقش تعیین کننده ای در بسیاری از جنبه ها از جمله کاهش
تغییرات آب و هوایی، بازسازی محیط زیست محیطی و ترویج توسعه اقتصادی ایفا می کند. هم جنگلهای طبیعی و هم جنگلهای کاشتهشده این جنبهها و کاربردها را برآورده میکنند و در نتیجه طیف گستردهای از شیوههای مدیریتی و اکوسیستمها [ 1 ]]. تکنیکهای سنتی نقشهبرداری از اندازهگیریهای میدانی استفاده میکنند که زمانبر و در نتیجه گران هستند. در مقابل، دادههای سنجش از دور اطلاعات درختی را از پروژههای مقیاس بزرگ در زمان کوتاهتری ارائه میکنند. زمین ناهموار و تاج پوشش متراکم نقشه برداری جنگل را برای تکنیک های سنتی و در حال توسعه چالش برانگیز می کند. پیشرفت در تکنیک های سنجش از دور مدرن به دلیل جمع آوری داده ها در مقیاس بزرگ و دیدگاه های مختلف بر این چالش ها غلبه می کند. تشخیص نور و محدوده (LiDAR) نشان دهنده یک ابزار سنجش از دور ارزشمند برای نقشه برداری جنگل، ارزیابی و محاسبه موجودی، با انواع پلت فرم ها، از حالت های زمینی تا هوایی است. اخیراً، تکامل پلتفرمهای سبک وزن، مانند وسایل نقلیه هوایی بدون سرنشین (پهپادها) که دارای حسگرهای لیزری داخلی، اسکنرهای لیزری دستی، و اسکنرهای لیزری کولهپشتی (BLS) هستند.2 ، 3 ، 4 ، 5 ]. علاوه بر هزینه نسبتا کم، وزن سبک و انعطاف پذیری عملیاتی سیستم پهپاد، مزیت اصلی ارائه داده ها در یک چارچوب مختصات جهانی با استفاده از سیستم ماهواره ای ناوبری جهانی و واحد اندازه گیری اینرسی (GNSS/IMU) است. حسگرها علاوه بر این، استفاده از پهپادها در جنگل ها اطلاعات غنی در مورد ساختار تاج پوشش و ارتفاع درختان دقیق را ارائه می دهد. با این حال، ساختار زیر سایهبان با چگالی کم اسکن میشود، که بسته به قابلیتهای حسگر، به ویژه انرژی پالس LiDAR، برای پهپادها در جنگلهای با تراکم بالا [ 6 ، 7 ] چالش برانگیز است.
پهپاد-LiDAR به دلیل هزینه نسبتا کم، پوشش در مقیاس بزرگ و انسداد کمتر در مقایسه با سکوهای LiDAR زمینی، به طور گسترده در کاربردهای جنگلداری مورد استفاده قرار گرفته است. ویژگی اصلی سیستمهای پهپاد این است که دادهها را در چارچوب مختصات جهانی به لطف یکپارچهسازی GNSS/IMU خود ارائه میکنند، که به طور مداوم موقعیتهای سه بعدی (3D) سکو را در طول پرواز با دقت محدود اندازهگیری میکند [ 8 ، 9 ، 10 ، 11 ، 12 ، 13 ، 14 ، 15]. برای اطمینان از پوشش کامل و کمترین انسداد در جمعآوری دادهها، دادههای UAV-LiDAR در نوارها/اسکنهای همپوشانی به دست میآیند، که به نوبه خود امکان افزونگی دادهها را فراهم میکند که برای غلبه بر خطاهای مربوط به سیستم ناوبری مفید است. این خطاها به شدت به پیکربندی چند حسی پهپادها، مانند ناهماهنگی و رانش ژیروسکوپی سیستم ناوبری اینرسی (INS) مرتبط است [ 16 ]. این روی نتیجه دادههای اسکن تأثیر میگذارد، بهویژه هنگام ادغام چندین اسکن یا نوار همپوشانی، همانطور که در شکل 1 نشان داده شده است.. بنابراین، استفاده از یک رویکرد کالیبراسیون/تنظیم مناسب مورد نیاز است. هدف اصلی این فرآیند کالیبراسیون، از بین بردن اثرات خطاهای ناشی از سیستم و ارائه تجزیه و تحلیل بهتر از ابرهای نقطه یکپارچه است که به آن تنظیم نوار گفته می شود.
تنظیم نوار به سادگی یک فرآیند تبدیل مختصات است که هدف آن اصلاح هندسی چند نوار در یک چارچوب مختصات یکپارچه است. این را می توان با استفاده از مجموعه ای از نقاط مزدوج درون نوارها انجام داد. بنابراین، شرط اصلی تراز کردن نوارها، شناسایی نقاط کلیدی کافی و همپوشانی جانبی کافی بین نوارها است. با توجه به این الزامات، اشکالات فرآیند در نسبت همپوشانی، هزینه نشانگرهای مصنوعی، جنگلهای متراکم و انواع ویژگیهای محدود در اسکنهای جنگلی نشان داده میشوند. ویژگی های اسکن شده برای جبران کمبود نقاط کنترل زمینی (GCPs) مورد سوء استفاده قرار می گیرند [ 17 ]]. ویژگی های موجود مربوط به نوع و ماهیت پروژه اسکن است. برای مثال، هنگام کار بر روی صحنههای شهری، ویژگیهای گوناگونی (ساختمانها، اشیاء قطبی، تقاطعهای جادهها و غیره) وجود دارد که نشاندهنده هندسههای مختلف (نقاط، خطوط، هواپیماها و غیره) است. در مقابل، اسکنهای جنگل فقط شامل یک نوع ویژگی است که در درختان نشان داده شده است، که چالشی برای تطبیق ویژگیها، بهویژه در جنگلهای مزرعه که در آن همه درختان تقریباً پارامترهای یکسانی در هر دو سطح درخت و قطعه دارند، ایجاد میکند. اگرچه تحقیقات زیادی در مورد ثبت نام مشترک ابر نقطه ای بدون نشانگر در مناطق جنگلی انجام شده است [ 18 ، 19 ، 20 ، 21 ، 22 ، 23 ، 24]، اینها بیشتر از درختان اسکن شده و پارامترهای آنها به عنوان مکان درخت یا تجزیه و تحلیل شکل استفاده می کنند. این رویکردها در اینجا برای برجسته کردن مشکل محدودیت ویژگی در اسکنهای جنگل در نظر گرفته میشوند، اما همه آنها تراز نواری یا کار با ابرهای نقطهای از سکوهای هوابرد را انجام نمیدهند.
در اینجا، یک روش عمومی برای هم ترازی نواری UAV-LiDAR در مناطق جنگلی، با خوشه بندی پوشش تاج با استفاده از الگوریتم خوشه بندی فضایی مبتنی بر تراکم سلسله مراتبی برنامه ها با نویز (HDBSCAN) و استخراج نقاط کلیدی مجازی از تداوم توپولوژیکی معرفی شده است. تجزیه و تحلیل خوشه های منفرد حاصل. این تحقیق توسعه و گسترش بیشتر کار ما است [ 25]، که در آن نوارهای UAV-LiDAR با استفاده از مجموعههای نقطه کلیدی از خوشههای سایبان حاصل از اعمال خوشهبندی فضایی مبتنی بر چگالی برنامهها با نویز (DBSCAN) بر روی پوشش سایبان بهطور هندسی تراز شدهاند. خوشههای مجزا توسط مخلوطهای گاوسی مدلسازی میشوند و برای تعریف میانگینهایشان، که به عنوان نقاط کلیدی استفاده میشوند، تجزیه و تحلیل میشوند. هر مجموعه نقطه یک قاب مختصات محلی در نظر گرفته می شود که در آن زاویه باربری و فواصل شعاعی از همه نقاط و مرکز تنظیم شده به خوبی مشخص است. ویژگیهای نقطهای از طریق تطبیق نمودار بر روی ویژگیهای منبع و هدف مطابقت داده میشوند تا مطابقت یک به یک ویژگی به دست آید. تبدیلهای مختصات صلب دوبعدی (یک چرخش و دو ترجمه) با جابجایی روی همه ترکیبهای جفت جستوجو میشوند تا جفتی که حداکثر درصد تطابق را در آستانه فاصله پلانیسنجی مشخص منعکس میکند، تعیین شود، در حالی که ترجمه z به طور جداگانه انجام میشود. با استفاده از مقادیر مدل رقومی ارتفاع (DEM) نقاط منطبق. در این کار، این روش با مجموعه دادههای بیشتری گسترش یافته است تا شامل دادههایی از دو فرکانس تکرار پالس مختلف (PRFs)، همراه با آزمایشهای بیشتر باشد. مشارکت های تحقیقاتی و نوآوری های اضافی بیش از [ این روش با مجموعه دادههای بیشتری گسترش یافته است تا شامل دادههایی از دو فرکانس تکرار پالس مختلف (PRF) باشد که با آزمایشهای بیشتری همراه است. مشارکت های تحقیقاتی و نوآوری های اضافی بیش از [ این روش با مجموعه دادههای بیشتری گسترش یافته است تا شامل دادههایی از دو فرکانس تکرار پالس مختلف (PRF) باشد که با آزمایشهای بیشتری همراه است. مشارکت های تحقیقاتی و نوآوری های اضافی بیش از [25 ] به شرح زیر است:
-
پارامترهای تبدیل سه بعدی برای هم ترازی مستقیم بین نوارهای UAV-LiDAR بدون نیاز به اطلاعات اضافی از تقسیم بندی تک درختی بازیابی می شوند، که از نظر عملکرد و دقت برای توده های جنگلی پیچیده همچنان چالش برانگیز است.
-
از مزایای الگوریتم HDBSCAN برای خوشه بندی داده های ابری با نقاط چگالی متفاوت استفاده می شود.
-
نقاط کلیدی مناسب با استفاده از تحلیل پایداری توپولوژیکی خوشههای مبتنی بر چگالی منفرد استخراج میشوند.
-
جایگشت روی همه ترکیبات ممکن از مجموعه مکاتبات برای تعیین بهترین ترکیب جفت برای محاسبه تبدیل صلب سه بعدی با 6 DoF (سه چرخش و سه ترجمه) استفاده می شود.
ادامه مقاله به شرح زیر تدوین شده است. کار پژوهشی مربوطه در بخش 2 ارائه شده است . بخش 3 منطقه مورد مطالعه و مجموعه داده ها را معرفی می کند و روش تحقیق را توضیح می دهد. نتایج تجربی و بحث در بخش 4 و بخش 5 ارائه شده است. در نهایت، نتیجه گیری در بخش 6 ارائه شده است.
2. کارهای مرتبط
تنظیم نوار یک فرآیند اصلی در پروژه های فتوگرامتری است که داده های آن در نوارها یا اسکن های متعدد به دست می آید. هدف آن تراز هندسی نوارهای زوج یا گروه بندی شده در یک چارچوب مختصات یکپارچه است. این فرآیند با استفاده از رویکردهای مبتنی بر نشانگر یا بدون نشانگر انجام می شود. روشهای مبتنی بر نشانگر معمولاً در نرمافزارهای تجاری یافت میشوند و اساساً به مجموعهای از GCPها بستگی دارند که به عنوان بخشی از پروژه اسکن تعریف میشوند. چالش های روش ثبت مرسوم در دسترس بودن GNSS/IMU برای کاربر نهایی و هزینه زمانی ایجاد GCP ها، به ویژه در مناطق جنگلی است. بنابراین، رویکردهای بدون نشانگر/بدون نشانگر برای غلبه بر این اشکالات توسعه یافته اند. رویکردهای بدون نشانگر معمولاً در ادبیات برای ابرهای نقطه شهری و جنگلی به طور همزمان استفاده می شود.26 ، 27 ، 28 ، 29 ]، خطوط [ 17 ، 30 ، 31 ، 32 ] و سطوح مسطح [ 33 ، 34 ، 35 ]. از سوی دیگر، چندین رویکرد ثبت اشتراک ابر نقطهای در مناطق جنگلی با استفاده از ساختار جنگل، پارامترهای درختی و نقاط مجازی از تجزیه و تحلیل شکل درخت انجام شده است. یک روش مبتنی بر شی [ 18] یکپارچهسازی دادههای اسکن لیزر هوابرد / اسکن لیزر زمینی (ALS/TLS) را با استفاده از یک الگوریتم جستجوی اکتشافی برای تعریف جفتهای نقطه بهینه که از تطابق نمودار بازیابی میشوند، بر اساس امتیاز تشابه توصیفگرهای ویژگی تشکیلشده از روابط فاصله بین بخشهای تقسیمشده، انجام داد. مکان های درختی در همان قطعه جنگلی. این کار با استفاده از دادههای UAV/BLS همثبتکننده در جنگل از طریق بهینهسازی بازپخت شبیهسازیشده برای تراز هندسی دادههای BLS با ابر نقطه پهپاد در فضای سهبعدی، گسترش یافت. محدودیت اصلی این تحقیق این است که در درجه اول به دقت مکان های درخت استخراج شده بستگی دارد. گوان و همکاران [ 37] یک هندسه جنگل ثابت مشترک بین درختان تقسیمبندی شده در ابر نقطه از پهپاد، BLS و TLS را در نظر گرفت و رویکردی را برای ثبت مشترک آنها، بر اساس تطابق زاویه و مساحت شبکههای نامنظم مثلثی (TIN) ایجاد شده بین مکان های درخت در قطعه جنگلی در نهایت، ثبت دقیق از طریق الگوریتم نزدیکترین نقطه تکراری (ICP) انجام شد. دقت این روش عمدتاً تحت تأثیر مکانیابی درخت و وجود درختان کامل در جفتهای اسکن قرار میگیرد، که تضمین آن در هنگام برخورد با دیدگاههای مختلف اکتساب (به عنوان مثال، ALS/TLS یا UAV/BLS)، ارائههای متفاوتی دشوار است. سطوح جزییات یا جنگل های با تراکم بالا. روشی با استفاده از تحلیل تاج پوشش [ 20] دو بار رویکرد میانگین تغییر را اعمال میکند تا ابتدا تاجهای درخت را استخراج کند، سپس حالتهای تاج منفرد را جستجو میکند که با تابع چگالی احتمال مطابقت دارند و با استفاده از الگوریتم رانش نقطه منسجم (CPD) تراز شدهاند. این روش برای آزمایش قطعات جنگلی از ترکیبات ALS/TLS استفاده شد. برید و همکاران [ 5 ] سیستم پهپاد RIEGL VUX-1 را با TLS مقایسه کرد تا ارتفاع سایبان و قطر در ارتفاع سینه (DBH) را بدست آورد. برای دادههای TLS، ثبت خودکار با استخراج نقاط اتصال بسته به سیلندرهای بازتابنده انجام شد. سپس، آنها یک تنظیم چند ایستگاهی را برای افزایش ثبت نام اعمال کردند. آنها انحراف استاندارد 0.62 سانتی متر را برای خطاهای همه صفحات کراوات به دست آوردند. روشی در پاریس و همکاران [ 22] برای استفاده از پوشش داده مکمل LiDAR بهدستآمده از دیدگاههای مختلف، بهویژه ALS و TLS، برای توصیف دقیق ساختار سهبعدی تاجهای درختان منفرد پیادهسازی شد. آنها از تصاویر همبستگی مدلهای ارتفاع تاج هوایی و زمینی (CHMs) برای تخمین تبدیل صلب دوبعدی بهینه (دو ترجمه، یک چرخش) استفاده کردند.
3. مواد و روشها
3.1. مواد
3.1.1. سوئیت مطالعه
جنگل دانگتای، واقع در جنوب شرقی چین در ساحل دریای زرد (120.826 درجه شرقی، 32.873 درجه شمالی)، همانطور که در شکل 2 a نشان داده شده است، برای این مطالعه در نظر گرفته شده است. این جنگل کاشتهشده با گونههای درختی اصلی از جمله سرخچوب سحر ( Metasequoia glyptostroboides )، صنوبر ( Populus deltoides ) و جینکو ( Ginkgo biloba L. ) است. مساحت کل تقریباً 22.4 کیلومتر مربع است و ارتفاعات آن از سطح متوسط دریا بین 11 تا 14 متر است. شکل 2 ب، مجاورت مستطیل شکل (1500 متر × 130 متر) را نشان می دهد که در جهت غرب به شرق کشیده شده است، که پارامترهای جنگلی متنوع و نمای ابر نقطه ای از هشت قطعه را در بر می گیرد.
نوارهای پهپاد (هر کدام به عرض 150 متر و طول آنها برای نوارهای جنوبی و شمالی 1500 و 1600 متر است) با استفاده از سیستم پهپاد GreenValley با دور جانبی 80 درصد اسکن شدند. هشت قطعه آزمایشی دایرهای با قطر 50 متر در ناحیه همپوشانی نوارها انتخاب شدند که در آن کرتهای V1، V2 و V4 دارای درختان صنوبر (برگریز) و کرتهای دیگر (V3، V5، V6، V7 و V8 هستند. ) قطعه های سحرخیز سرخدار (سوخاری) هستند. جدول 1 پارامترهای جنگل هشت قطعه از UAV-LiDAR GreenValley را فهرست می کند.
یک جفت نوار دیگر (با ابعاد 1300 × 80 متر)، همانطور که در شکل 2 نشان داده شده است.ج، در منطقه مورد مطالعه با استفاده از یک اسکنر لیزری RIEGL UAV VUX-1 در دو فرکانس تکرار پالس لیزری مختلف (PRF) اسکن شد: 380 هرتز و 550 هرتز. همپوشانی جانبی بسیار کم (45%) بود و در نتیجه ده قطعه جنگلی از منطقه همپوشانی با قطر 30 متر انتخاب شد. کرت های Riegl R1 تا R10 نامیده می شوند، با R1، R5، R6، R8، R9، و R10 حاوی درختان سرخپوست سپیده دم، و قطعات باقی مانده (R2، R3، R4 و R7) دارای درختان صنوبر هستند. تمامی قطعات آزمایشی از نقشه GIS-جنگل منطقه، با در نظر گرفتن ویژگیهای مختلف درخت، مانند گونه، مرحله توسعه و تراکم ساقه، برای آزمایش عملکرد روش پیشنهادی بر روی مخلوطی از پیچیدگی قطعه و جنگل مربوط به آنها انتخاب شدند. پارامترها، همانطور که در جدول 1 و جدول 2 ارائه شده است.
3.1.2. مجموعه داده های پهپاد-لیدار
دادههای ابر نقطهای با استفاده از دو سیستم پهپاد مختلف با پارامترهای پرواز و اسکنر در جدول 3 جمعآوری شدند . یک جفت نوار با یک سیستم پهپاد GreenValley جمع آوری شد. وزن این سیستم 6 کیلوگرم است و دارای سنسور لیزری Velodyne Puck (VLP-16) با حداکثر زاویه اسکن 30 درجه و طول موج 903 نانومتر است، در حالی که واگرایی پرتو 3 mrad است. این پهپاد با سرعت 86 متر با سرعت 3.6 متر بر ثانیه پرواز کرد و فرکانس اسکن 16 خط در ثانیه و تراکم نقطه ای 84 نقطه بر متر مربع را با ردپای 26 سانتی متری تولید کرد .
دو جفت نوار دیگر با استفاده از یک سیستم پهپاد Riegl با یک حسگر لیزری Riegl VUX-1 [ 38 ]، اسکن شدند که با دو فرکانس تکرار پالس: 380 هرتز و 550 هرتز کار میکنند. RIEGL VUX-1UAV دریافت اطلاعات با سرعت بالا را با هر جهت نصب ارائه می دهد. خطوط اسکن حاصل تقریباً موازی با یک الگوی نقطهای منظم به دلیل مکانیسم اسکن آینه با چرخش سریع هستند. جهت پرواز هر دو سامانه پهپاد از غرب به شرق بود.
3.2. مواد و روش ها
هدف این استراتژی تراز کردن جفتهای نوار پهپاد-LiDAR در مناطق جنگلی با تجزیه و تحلیل خوشهبندی سلسله مراتبی بر اساس چگالی پوشش تاج است. این روش شامل سه مرحله اصلی است که در شکل 3 نشان داده شده است: مرحله I پیش پردازش داده ها را انجام می دهد که شامل حذف نقاط زیر سایه است. مرحله دوم مربوط به استخراج نقاط کلیدی است که ابتدا HDBSCAN را روی تاجپوشهای درخت اعمال میکند و سپس یک تحلیل توپولوژیکی از خوشههای منفرد را برای استخراج نقاط کلیدی اجرا میکند. و در نهایت مرحله III که ویژگی های مربوطه را تشکیل می دهد و جستجو می کند تا فرآیند تبدیل بین ویژگی های منبع و هدف را تکمیل کند تا کل ابر نقطه را تراز کند. از آنجایی که مجموعه داده هایی که باید تراز شوند از همان حسگر به دست می آیند و داده های پهپاد همیشه ارجاع داده می شوند، این روش از یک مدل تبدیل سه بعدی سفت و سخت بدون ضریب مقیاس (6 پارامتر تبدیل) استفاده می کند. از این رو، تنها سه حرکت انتقالی و سه چرخش وجود دارد.
3.2.1. جداسازی نقاط سایبان و زیر سایبان
از آنجایی که استراتژی بر روی خوشه بندی بر اساس تراکم پوشش تاج پوشش متمرکز است، یک روش جداسازی ارتفاع مبتنی بر هیستوگرام برای تمایز بین نقاط تاج و زیر تاج استفاده می شود. ابتدا، یک هیستوگرام ارتفاع برای زمین ابر نقطه نرمال شده با استفاده از عرض bin 1 متر ایجاد می شود. روش Otsu [ 39 ] برای تجزیه و تحلیل هیستوگرام برای تعیین ارتفاع جدایی بین سطوح تاج و زیر تاج استفاده می شود. الگوریتم از طریق تمام سطل های ارتفاع ممکن L تکرار می شود و اندازه ای از گسترش ارتفاع نقطه در دو طرف آستانه را محاسبه می کند. هدف الگوریتم یافتن مقدار آستانه است تیکه در آن واریانس درون کلاسی ( σα2(تی)) حداقل آن را ثبت می کند. واریانس درون کلاسی با معادله (1)، که در آن σ02 آnد σ12به ترتیب واریانس های کلاس های زیر سایبان و سایبان هستند. وزنه ها α0(تی)=∑من=0تی-1پ(من)و α1(تی)=∑من=تیLپ(من)احتمالات دو کلاس در آستانه t هستند. شکل 4 نمونه ای از تشخیص ارتفاع جداسازی برای (الف) گونه های درخت صنوبر و (ب) گونه های درختان مخروطی را نشان می دهد.
3.2.2. استخراج نقطه کلیدی با تجزیه و تحلیل پایداری توپولوژیکی
دیدگاه جمع آوری داده های اسکنر لیزری پهپاد نشان می دهد که اشیاء اسکن شده از بالا جزئیات بیشتری را در سطوح بالاتر نسبت به سطوح پایین ارائه می دهند. این ماهیت داده با انجام همترازی نوار بر اساس خوشهبندی HDBSCAN سایبان اسکن شده مورد بهرهبرداری قرار میگیرد. ارتفاعات حاصل از خوشههای منفرد برای استخراج یک نقطه نماینده واحد از طریق پایداری توپولوژیکی تجزیه و تحلیل میشوند. اول، تاج های درخت از طریق خوشه بندی مبتنی بر چگالی سلسله مراتبی برنامه ها با الگوریتم نویز (HDBCSAN) توسط [ 40 ] به خوشه های جداگانه گروه بندی شده اند. این الگوریتم اصلاحی از DBSCAN سنتی است [ 41]. مفهوم DBSCAN بیان می کند که یک خوشه منفرد ناحیه ای از نقاط با چگالی بالا است و خوشه های متعدد با چگالی کم یا مناطق خالی از هم جدا می شوند. به تعداد خوشه ها به عنوان ورودی نیاز ندارد، که برای بسیاری از تکنیک های خوشه بندی دیگر چالش برانگیز است. علاوه بر این، می تواند به طور خودکار خوشه های اشکال و اندازه های دلخواه را کشف کند. با این حال، مهمترین عامل این است که نقاط باید مرتبط با تراکم باشند تا در یک خوشه جمع شوند و بنابراین، نقاط مختلف با همسایگی کم تراکم به عنوان نویز برچسب گذاری می شوند. HDBSCAN بر محدودیت های الگوریتم اصلی DBSCAN غلبه می کند زیرا با تغییر خودکار آستانه فاصله جستجو در طول خوشه بندی بر روی داده های چگالی متفاوت کار می کند و در نتیجه تنها یک پارامتر ورودی (MinPts) دارد که به راحتی از چگالی داده قابل درک است.
با توجه به یک ابر نقطه که به پارتیشن بندی شده است نخوشه ها ℂ={سی1، سی2،سی3، …، سین}، لازم است برای هر خوشه یک نقطه کلید استخراج شود. با توجه به ساعتسیمنارتفاع از خوشه است سیمنیک تابع f ( j ) = {ساعت1سیمن، ساعت2سیمن،…،ساعت n-1سیمن،ساعتnسیمن}با پرتاب کردن n نقطه خوشه بر روی صفحه XZ تشکیل می شود. توپولوژی f ( j ) مربوط به منتهی الیه محلی است که در آن گرادیان ناپدید می شود (∇ƒ(j)=0). تغییرات توپولوژیکی f ( j ) با قرار دادن نقاط انتهایی در همسایگی محلی مشخص می شود. یک نقطه پj ∈ f ( j ) به عنوان حداکثر محلی اگر تعریف می شود ساعتپ(j-1)<ساعتپ(j)و ساعتپ(j+1)<ساعتپ(j)در حالی که حداقل محلی خواهد بود اگر ساعتپ(j)<ساعتپ(j-1)و اگر ساعتپ(j)<ساعتپ(j+1). پس از شناسایی تمام نقاط انتهایی محلی، ماندگاری توپولوژیکی برای تمام نقاط ماکزیمم محلی محاسبه می شود. یک ماندگاری توپولوژیکی (ρ)طول عمر یک نقطه بحرانی (حداکثر محلی) f ( j ) را اندازه می گیرد و به عنوان بزرگترین انحراف f ( j ) بین حداکثر محلی و حداقل محلی مجاور همانطور که در رابطه (2) توضیح داده شده است، محاسبه می شود.
هرچه ماندگاری توپولوژیکی بزرگتر باشد، حداکثر محلی پایدارتر است [ 42 ]. سپس یک نقطه پj ∈ f(j)به عنوان نقطه کلیدی برای سیمناگر به بزرگترین مقدار پایداری توپولوژیکی در بین تمام نقاط ماکزیمم محلی دست یابد. این فرآیند برای همه خوشه ها انجام می شود ℂمجموعه ای از نقاط کلیدی برای ابر نقطه به دست می آید. شکل 5 نمونه ای از استخراج نقطه کلیدی را با تداوم توپولوژیکی برای یک خوشه نشان می دهد. ابتدا تمام نقاط افراطی شناسایی می شوند. دوم، پایداری توپولوژیکی محاسبه می شود و نقطه ای که بیشترین مقدار پایداری را دارد به عنوان نقطه کلیدی مشخص می شود.
این روش جایگزینی برای نقاط کلیدی از مکانیابی درختی با این مزیت ارائه میکند که خوشههای منفرد لزوماً با یک شی درختی مطابقت ندارند. شکل 6 نمونه هایی از نتایج خوشه بندی و استخراج نقطه کلیدی دو قطعه آزمایشی را نشان می دهد: ردیف بالا برای کرت برگریز و ردیف پایین برای کرت مخروطی. خوشههای منفرد از کرتهای برگریز میتوانند یک درخت یا بیشتر را نشان دهند، همانطور که در بالا سمت راست شکل 6 نشان داده شده است ، اما در درختان قرمز، بیشتر خوشهها به دلیل شکل مشخص تاج، درختان منفرد را نشان میدهند. بنابراین، این انگیزه استفاده از تحلیل پایداری توپولوژیکی مبتنی بر خوشه به جای روشهای مبتنی بر تقسیمبندی است که به مکانهای درختی بستگی دارد.
3.2.3. شباهت ویژگی ها
ویژگی های نقطه ای ابتدا با در نظر گرفتن مرکز هر مجموعه نقطه ℙ ایجاد می شوند. سپس با محاسبه فاصله شعاعی برای هر نقطه بردار دو جزء تشکیل می شود دو زاویه یاتاقان θ از این نقطه تا مرکز تنظیم شده. فواصل و زوایا برای کل تعداد نقاط هر مجموعه داده در فضای ℝ 2 محاسبه می شود. برای مجموعه نقطه ای ℙ (X) = {X 1 ، ….، …، Xn}، متشکل از n بردار مختصات سه بعدی X، فواصل و زوایای باربری نسبت به مرکز مجموعه X o محاسبه می شود تا توصیفگرهای ویژگی را تشکیل دهند. اگر N و M به ترتیب تعداد نقاط کلیدی در نقاط مبدا و هدف باشند، توصیفگرهای N و M برای هر دو مجموعه تولید میشوند. تابع شباهت سترکیبی از معیارهای میل فاصله و زاویه، که هر کدام به طور جداگانه محاسبه شده و برای تعریف امتیاز شباهت با N ردیف و M ستون از آن کم می شود، در رابطه (3) بیان شده است.
ترم اول اسθمربوط به ماتریس میل ترکیبی زاویه [ 43 ] با استفاده از تفاوت است Δθمنjبین جفت زاویه مقایسه شده θمنسو θjتیبه ترتیب از ویژگی های منبع و هدف. تفاوت Δθمنjبه عنوان یک توزیع گاوسی محاسبه می شود، در حالی که ترم آخر اسدنزدیکی فاصله برای جفت فاصله است دمنس، دjتیاز ویژگی ها:
3.2.4. تطبیق ویژگی
یک گراف دو بخشی G با رئوس V، V = N ∪ M با N و M به ترتیب نشان دهنده ویژگی های منبع و هدف، در حالی که N∩ M = ∅ و یال های E ⊆ N × M . نمودار با اضافه کردن گره های ساختگی با وزن صفر به مجموعه نقطه فرعی که رئوس N × N را به دست می دهد، به یک دوبخشی با وزن کامل تبدیل می شود. وزن wمنjاز یک لبه همنj ∈ E، اتصال دو راس vمن و vjدر G معادل است اس(من،j). مشکل تطبیق حداکثر وزن در نمودار دوبخشی G با وزنهای w با استفاده از الگوریتم کوهن-مونکرس [ 44 ] که یک الگوریتم O(∣V∣ 3 ) است، حل میشود تا مطابقت یک به یک بهطوری که شباهت کل به دست آید. S T از رئوس منطبق حداکثر شده:
شکل 7 نتایج تطبیق نمودار بین مجموعه نقطه منبع و هدف را نشان می دهد (نقاط کلیدی نقاط سیاه هستند). خطوط قرمز نشان دهنده نقاط منطبق در فواصل کمتر از 1 متر هستند، در حالی که خطوط آبی با دقت تطابق کمتر در فواصل بیش از 1 متر هستند. علاوه بر این، تطبیق تصادفی وجود دارد که با خطوط سرخابی نشان داده می شود. بنابراین، همه جفتهای تطبیق کاملاً صحیح نیستند، که نشان میدهد که تبدیل باید از طریق جفتهای تطبیق مجموعه مطابقت (Cs) بهینه شود.
3.2.5. تبدیل با جستجوی بهترین ترکیب از مکاتبات
تابع تبدیل جسم صلب سه بعدی در معادله (8) با سه چرخش و سه انتقال تعریف شده برای تراز دو نوار با استفاده از مجموعه تناظر حاصل از تطبیق نمودار، توضیح داده شده است. ضریب مقیاس در نظر گرفته نمی شود زیرا تمام جفت داده ها با یک نوع سنسور به دست می آیند و داده های پهپاد همیشه ارجاع داده می شوند.
اعمال تابع تبدیل در تمام نقاط تطبیق تنها در صورتی درست خواهد بود که 100% جفت های تطبیق صحیح باشند، که قابل اجرا نیست و نمی توان تضمین کرد. بنابراین، بهترین ترکیب در مجموعه تطبیق با در نظر گرفتن همه ترکیبهای جفت قابل تصور بدون جایگزینی، مانند الگوریتم 1 جستجو میشود. L Ms و تعداد جفت انتخاب شده را تنظیم کنیدپآمنrشمردن، که از دو تا ( L Ms -1) جفت نقطه گسترش می یابد.
| الگوریتم 1: تبدیل با بهترین ترکیب جفت |
 |
تابع (EuclideanDeviation) باقیمانده های فاصله اقلیدسی را در نقاط منطبق پس از تراز کردن محاسبه می کند و تعداد (PointsCount) نقاط (PointInThreshold) را که مقادیر آنها کمتر از یک آستانه تعیین شده (dthr) است، ثبت می کند. پارامترهای تبدیل با استفاده از جفت ترکیب PCbest به دست میآیند که حداکثر PointCount را نشان میدهد. الگوریتم پارامترهای تبدیل و جفت نقاط منطبق (MatchedPoints) را در آستانه برمی گرداند.
شکل 8 یک نتیجه مثال از تراز کردن نقاط کلیدی با استفاده از جایگشت در مجموعه مکاتبات را نشان می دهد. الگوریتم با ترکیبی از دو جفت نقطه منطبق شروع می شود، جایی که بهترین تبدیل یک تطابق نادرست را نشان می دهد، اما میانگین باقیمانده حدود 30 سانتی متر است. سپس، این ترکیب به سه جفت بهروزرسانی میشود و نتایج بهبود مییابند و قابل اعتماد به نظر میرسند و به نرخ تطابق بالاتر و میانگین باقیمانده بالاتری دست مییابند. ترکیب جفت بیشتر افزایش مییابد و نتایج تا زمانی مشاهده میشوند که تعداد مسابقات کاهش یابد یا برای سه تکرار متوالی ثابت بماند. هنگامی که دو ترکیب جفت دارای تعداد مشابهی هستند، ترکیب زوج انتخابی باید ترکیبی باشد که میانگین فاصله باقیمانده کمتری دارد.
4. آزمایش ها و نتایج
4.1. تنظیم پارامتر
تنها پارامتر HDBSCAN حداقل تعداد نقاط مورد نیاز برای تشکیل یک خوشه واحد (MinPts) است. یکی دیگر از پارامترهای مرتبط، آستانه باقیمانده مجاز برای تنظیم جفت منطبق به عنوان یک عضو داخلی است. این مقدار برای تمام قطعات آزمایشی 0.50 متر ثابت است. جداسازی نقاط زیر تاج به ارتفاع مطلق از سطح دریا اعمال می شود، زیرا قطعات آزمایشی متعلق به یک جنگل کاشته شده با توپوگرافی مسطح است. در مورد توپوگرافی ناهموار، ارتفاعات مطلق با استفاده از یک DEM از ابر نقطه یا با استفاده از فیلتری که یک CHM از نمودار آزمایشی را تولید می کند، در معرض نرمال سازی قرار می گیرند.
4.2. ارزیابی
فواصل اقلیدسی در نقاط منطبق قبل و بعد از فرآیند هم ترازی محاسبه می شود و سپس با مقایسه می شود تا نشان دهد که چقدر اختلاف بین ابرهای نقطه مبدا و مقصد کاهش یافته است. علاوه بر این، تقسیم بندی درخت برای هر دو ابر نقطه مبدا و هدف قبل از تراز و برای ابر نقطه هدف پس از تراز انجام می شود و تعداد درختان مطابق مورد بررسی قرار می گیرد. علاوه بر این، نتایج تجربی با یک روش پایه [ 18 ] برای تعیین مزایا و معایب روش پیشنهادی مقایسه میشوند.
4.3. نتایج
این روش روی سه جفت نوار پهپاد، یک جفت از مجموعه داده Velodyne و دو جفت از مجموعه داده Riegl در فرکانسهای مختلف آزمایش شد. مجموعه داده ها شامل دو گونه درختی است: صنوبر، با سه قطعه آزمایشی (V1، V2، و V4) از پهپاد Velodyne، و چهار قطعه (R2، R3، R4، و R7) از پهپاد Riegl، و داون ردوود، با پنج قطعه. پلات (V3، V5، V6، V7، و V8) از پهپاد Velodyne و شش قطعه جنگلی (R1، R5، R6، R8، R9، و R10) از پهپاد Riegl.
نتایج هم ترازی نقاط کلیدی استخراجشده برای همه کرتها، بدون در نظر گرفتن کلاس درخت، تراکم یا توزیع، بهبود قابلتوجهی را در همزمانی آنها پس از تراز از قبل نشان میدهد. جدول 4 نتایج تراز مجموعه داده Velodyne را خلاصه می کند. درصد تطابق حاصل تقسیم تعداد نقاط منطبق بر تعداد نقاط کوچکتر نقاط کلیدی منبع و هدف است. nتومتربهr of مترآتیجساعتهد پoمنnتیس منn تیساعتrهسساعتoلد مترمنn (سoتوrجهپoمنnتیس ، تیآrgهتیپoمنnتیس)). کرت های گونه های درخت پهن برگ (صنوبر) دارای درصد تطبیقی از 43٪ تا 55٪ و محدوده متناظر کرت های چوب سرخ سحر از 18٪ تا 82٪ است. نتایج با استفاده از معیار ارزیابی ( بخش 4.2)، و افزایش فاصله معقول باقیمانده در تمام کرت ها مشاهده شد. حداکثر اختلاف فاصله اقلیدسی برای تمام کرت ها کمتر از 50 سانتی متر بود، در حالی که میانگین این انحرافات به ترتیب از 31 سانتی متر تا 36 سانتی متر و 28 سانتی متر تا 31 سانتی متر برای کرت های پهن برگ و مخروطی ها متغیر بود. افزایش میانگین باقیماندهها در نقاط منطبق پس از تراز را میتوان با درصد میانگین انحراف پس از تراز نسبت به قبل از تراز مشاهده کرد. مشخص شد که برای کرت های صنوبر حداقل این درصد 81 درصد است در حالی که کرت سوزنی برگ حداقل 5/88 درصد است.
توزیع فاصله باقیمانده در نقاط منطبق پس از تراز برای تمام نمودارهای Velodyne همانطور که در شکل 9 الف نشان داده شده است، بررسی شده است. خطوط نارنجی نشان دهنده میانه مقادیر باقیمانده در نقاط منطبق بر کرت های جداگانه است.
نتایج هم ترازی مجموعه داده های پهپاد Riegl در دو گروه بر اساس فرکانس تکرار پالس (380 هرتز و 550 هرتز) مورد بحث قرار می گیرد. گروه اول 380 هرتز دارای محدوده درصد تطبیقی از 29٪ تا 47٪ برای پلات های صنوبر، با دامنه میانگین انحرافات سه بعدی در نقاط منطبق پس از تراز از 33 سانتی متر تا 44 سانتی متر است، در حالی که نمودارهای چوب سرخ طلوع یک تطابق را نشان می دهند. درصد از 30٪ تا 67٪، با محدوده میانگین انحراف پس از تراز از 26 سانتی متر تا 37 سانتی متر. گروه دوم در فرکانس 550 هرتز محدوده تطابق را به ترتیب از 44 تا 54 درصد و 40 تا 86 درصد برای کرت های پهن برگ و مخروطیان نشان می دهد. محدوده میانگین انحرافات در نقاط منطبق پس از تراز از 33 سانتی متر تا 46 سانتی متر برای کرت های آزمایشی برگریز و 28 سانتی متر تا 38 سانتی متر برای کرت های آزمایش مخروطی ها در 550 هرتز است.
شکل 10 نمونه ای از نتایج هم ترازی داده های ابر نقطه ای از مجموعه داده Velodyne را نشان می دهد. ردیف بالا نشان دهنده طرح گونه های درختان مخروطی و ردیف پایین گونه های درخت صنوبر را نشان می دهد. نتایج هم ترازی دو گونه درختی (ستون سمت راست: (ب)، (د)) نشان می دهد که مناطق انسداد در مقایسه با وضعیت قبل از تراز (ستون چپ: (الف)، (ج)) پوشش داده شده است و اختلافات عمودی دارند. حذف شده است. رنگهای سبز و قرمز نشاندهنده دادههای تک تک نوارها هستند.
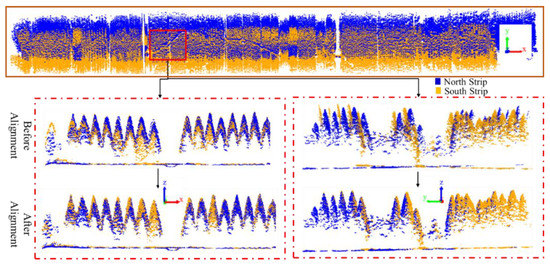
جدول 5 خلاصه ای از نتایج تطبیق و فاصله باقیمانده برای تمام نمودارهای آزمایشی از مجموعه داده Riegl را قبل و بعد از تراز کردن ارائه می دهد. توزیع فاصله باقیمانده در نقاط منطبق پس از تراز داده های به دست آمده در 380 هرتز و 550 هرتز به ترتیب در شکل 9 b,c نشان داده شده است. سپس نتایج هم ترازی نقاط کلیدی بر روی ابر نقطه اعمال می شود تا قابلیت اطمینان روش را نشان دهد. نمونه ای از نتایج همترازی ابر نقطه ای یک نمودار مخروطی از مجموعه داده Riegl در شکل 11 نشان داده شده است.که در آن ردیف بالا (a, b) نمایه ای را در امتداد ابر نقطه با فرکانس 380 هرتز و ردیف پایین (c, d) نشان دهنده نتایج همان مشخصات در 550 هرتز است. برای هر دو پروفیل و ارجاع به باقیمانده ها در نقاط منطبق در تمام نمودارها، نتایج نشان دهنده یک تراز خوب و واقعی بین ابرهای نقطه است.
5. بحث
جمعآوری دادههای LiDAR در نوارها/اسکنهای چندگانه در جنگلها در بیشتر موارد به دلیل عوامل مختلفی از جمله انسداد، پوشش در مقیاس بزرگ و محاسبه دقیقتر پارامترهای ساختار جنگل ضروری است. پهپاد-LiDAR مزایای بیشتری در جنگل ها دارد زیرا داده ها در موقعیت جغرافیایی واقعی آنها توسط حسگر GNSS روی پلت فرم پهپاد ارائه می شود و چشم انداز چشم پرنده آن جزئیات بیشتری را در مورد درختان جنگل های انبوه با تاج پوشش ارائه می دهد.
UAV-LiDAR در مقایسه با فتوگرامتری مزایایی نیز دارد. علاوه بر ویژگی داده های غنی شده و دریافت مستقیم داده های سه بعدی، UAV-LiDAR به دلیل قابلیت LiDAR در نفوذ به سایبان، اطلاعات بیشتری در مورد سطح نزدیک به زمین ارائه می دهد.
تراز خودکار ابر نقطه ای در جنگل ها با استفاده از روش های اثبات شده انجام شده است. برخی از این رویکردها به ویژگیهای هندسی و پارامترهای جنگل (موقعیتهای درخت/ساقه، ارتفاع درخت، یا DBH) بستگی دارند [ 21 ، 22 ، 36 ، 37 ]، در حالی که برخی دیگر از نقاط کلیدی تحلیل تاج پوشش با انجام تقسیمبندی میانگین تغییر استفاده میکنند. 20]. روش ما شبیه به روش های مبتنی بر تجزیه و تحلیل سایبان است. با این حال، روش های قبلی به داده های اسکن چند TLS برای استخراج منطقی تاج درخت نیاز داشتند. روش معرفی شده در اینجا به هیچ پارامتر جنگلی نیاز ندارد و فقط به نقاط تاج پوشش کافی نیاز دارد. آزمایش ها بر روی دو مجموعه داده انجام شد. یک جفت نوار Velodyne PUK-1 (VLP-16) را تشکیل داد، که در آن هشت قطعه آزمایشی به قطر 50 متر برش داده شدند، که نشان دهنده گونه های درختی صنوبر (3 قطعه) و سپیده دم (5 قطعه) بود. روش پیشنهادی، تبدیل صلب را با جستجو برای بهترین ترکیب جفت از مجموعه تناظر، بر اساس اینکه چند نقطه درونی پس از تبدیل به باقیماندههای فاصله در یک آستانه دست مییابد، تعیین میکند. دلیل نیاز به انتخاب جفتهای خاص برای تخمین تبدیل این است که نتایج تطبیق نمودار همچنان دارای تطابقات نادرستی هستند که شناسایی نمیشوند. بنابراین، مرحله به جای بهینه سازی تبدیل، بر انتخاب بهترین جفت ها تمرکز دارد. پارامترهای تبدیل حاصل ممکن است پارامترهای بهینه نباشند، اما نمایانگرترین مجموعه نقطه هستند. برای این منظور، از روش (به عنوان مثال، حداقل مربعات) برای مورد ما استفاده شد تا مدل تبدیل را بهینه کنیم، علیرغم اینکه روش حداقل مربعات به نقاط پرت حساس است. این روش عملکرد خوبی را در قطعات جنگلی هر دو گونه درخت نشان داد، همانطور که نتایج هم ترازی و اعتبارسنجی نشان داد. مرحله به جای بهینه سازی تبدیل، بر انتخاب بهترین جفت ها تمرکز دارد. پارامترهای تبدیل حاصل ممکن است پارامترهای بهینه نباشند، اما نمایانگرترین مجموعه نقطه هستند. برای این منظور، از روش (به عنوان مثال، حداقل مربعات) برای مورد ما استفاده شد تا مدل تبدیل را بهینه کنیم، علیرغم اینکه روش حداقل مربعات به نقاط پرت حساس است. این روش عملکرد خوبی را در قطعات جنگلی هر دو گونه درخت نشان داد، همانطور که نتایج هم ترازی و اعتبارسنجی نشان داد. مرحله به جای بهینه سازی تبدیل، بر انتخاب بهترین جفت ها تمرکز دارد. پارامترهای تبدیل حاصل ممکن است پارامترهای بهینه نباشند، اما نمایانگرترین مجموعه نقطه هستند. برای این منظور، از روش (به عنوان مثال، حداقل مربعات) برای مورد ما استفاده شد تا مدل تبدیل را بهینه کنیم، علیرغم اینکه روش حداقل مربعات به نقاط پرت حساس است. این روش عملکرد خوبی را در قطعات جنگلی هر دو گونه درخت نشان داد، همانطور که نتایج هم ترازی و اعتبارسنجی نشان داد.
در بررسی نتایج پهپاد Velodyne با در نظر گرفتن گونههای درختی، برای کرتهای V2 (برگریز) و کرت V3 (تخروطیان) با تراکم ساقه یکسان، کرت V3 درصد تطابق بیشتری (82%) نسبت به کرت V2 (55%) دارد. ، و همچنین نشان دادن تعداد امتیاز تطابق بهتر. با اعمال مقایسه مشابه بین کرت های V3 و V5، نمودار V3 به دلیل ارتفاع کم درخت در قطعه V5 به مقادیر بسیار بالاتری دست می یابد. با این حال، هر دو قطعه مخروطی هستند. این نتیجه گیری توسط نتایج کرت های V7 و V8، که پارامترهای جنگلی یکسانی دارند، پشتیبانی می شود، با این تفاوت که قطعه V8 دارای درختان بالاتر و در نتیجه تطابق بالاتر (63٪) است.
در مورد مجموعه داده Riegl، دادهها در دو فرکانس تکرار پالس (PRF) ارائه میشوند که فاکتورهای تحلیل بیشتری را ممکن میسازد. نتیجه هر پارامتر درختی را می توان در هر دو فرکانس مشاهده کرد و همچنین میزان تأثیر فرکانس بر نتایج را می توان مشاهده کرد. در زمینه امواج لیزر، بیان شده است که انرژی پالس برابر است با میانگین توان ارسالی تقسیم بر نرخ تکرار، به این معنی که هر چه PRR بیشتر باشد، انرژی پالس کمتر است. بنابراین، PRR یک فاکتور حیاتی برای هر حسگر LiDAR است زیرا چگالی نقطه را کنترل میکند، که برای استخراج اطلاعات جغرافیایی غنی و دقیق ارزشمند است. با این حال، کاهش انرژی پالس منجر به کاهش دقت محدوده اندازهگیری شده میشود. تمام قطعات صنوبر Riegl دارای تراکم یکسان (208 درخت در هکتار) و ارتفاع درخت تقریباً یکسان هستند، به جز R7، که درختان کمتری نسبت به بقیه داشت. درصد تطبیق این نمودارهای صنوبر در 550 هرتز به طور مداوم بیشتر از مقادیر مربوطه آنها در 380 هرتز است، همانطور که در نشان داده شده است.شکل 12 . این را می توان به چگالی نقطه بالا ارائه شده توسط داده های فرکانس بالاتر نسبت داد زیرا درصد تطابق در همه موارد حتی برای درختان پایین تر در قطعه R7 افزایش یافته است. با این حال، کرت های مخروطی پارامترهای جنگلی متفاوتی را برای کرت های R6 و R8 با تراکم ساقه و گونه های درخت یکسان ارائه می دهند، اما R6 ارتفاع درخت کمتری دارد، بنابراین R6 تطابق کمتری نسبت به R8 در هر دو فرکانس داده نشان می دهد. در جدول 5میانگین فاصله 3 بعدی باقیمانده در نقاط منطبق پس از تراز برای هر دو فرکانس PRR تفاوت معنیداری ندارد و 8 سانتیمتر حداکثر اختلافی است که برای کرت مخروطی R1 با کمترین تراکم تودههای کرتهای چوب سرخ رخ داده است. این طرح دارای درختان نسبتاً بالاتر و درصد تطبیق بالاتری نسبت به مزدوج خود از مجموعه داده 380 هرتز است. حتی اگر درصد تطبیق به دلیل چگالی نقطه به طور مداوم بالاتر است، باقیمانده های فاصله حاصل در نقاط تطبیق بهبود قابل توجهی را نسبت به داده های فرکانس پایین نشان نمی دهند و در برخی موارد دقت کمتری دارند (به عنوان مثال، نمودارهای آزمایشی R6، R7، R9 و R10). قطعه آزمایشی R7 دارای گونه درختی خزان کننده با ارتفاع کم 6/8 متر و تراکم ساقه 208 درخت در هکتار است. این پارامترها بیش از کاهش دقت ناشی از انرژی کمتر با افزایش دامنه، همراه با شکل نامنظم تاج درختان صنوبر است. این نیز توسط نتایج R6 و R8 هنگام در نظر گرفتن اختلاف ارتفاع درخت هر دو پشتیبانی میشود، حتی اگر آنها گونههای یکسان (مخروطیان) و تراکم ساقه یکسانی داشته باشند. علاوه بر این، کرت های آزمایشی R9 و R10 دارای تراکم توده یکسان و درختان نسبتاً بالاتر بودند و نتایج مشابهی برای هر دو PRF به دست آمد. این نشان میدهد که اگرچه دادههای فرکانس بالا دارای نقاط چگال بیشتری نسبت به دادههای فرکانس پایین هستند، نتایج به دلیل تخریب انرژی لزوماً بالا نیستند. حتی اگر گونه های یکسان (سوخاری) و تراکم ساقه یکسانی داشته باشند. علاوه بر این، کرت های آزمایشی R9 و R10 دارای تراکم توده یکسان و درختان نسبتاً بالاتر بودند و نتایج مشابهی برای هر دو PRF به دست آمد. این نشان میدهد که اگرچه دادههای فرکانس بالا دارای نقاط چگال بیشتری نسبت به دادههای فرکانس پایین هستند، نتایج به دلیل تخریب انرژی لزوماً بالا نیستند. حتی اگر گونه های یکسان (سوخاری) و تراکم ساقه یکسانی داشته باشند. علاوه بر این، کرت های آزمایشی R9 و R10 دارای تراکم توده یکسان و درختان نسبتاً بالاتر بودند و نتایج مشابهی برای هر دو PRF به دست آمد. این نشان میدهد که اگرچه دادههای فرکانس بالا دارای نقاط چگال بیشتری نسبت به دادههای فرکانس پایین هستند، نتایج به دلیل تخریب انرژی لزوماً بالا نیستند.
از منظر مجموعه داده و پس از مراجعه به جدول 1 و جدول 2، که پارامترهای نمودار را فهرست می کند، مشاهده می شود که نمودارهای آزمایشی V7 و R6 دارای پارامترهای یکسانی هستند به جز ارتفاع درخت که تفاوت معنی داری ندارد. درصد تطابق آنها برای V7 و R6 به ترتیب 18٪ و 60٪ بود. ارتفاع درخت کمتر (کمتر از 8 متر) دلیل این تفاوت بزرگ (42٪) در درصد تطبیق است، که نشان می دهد که چگالی نقطه بالاتر در مورد مجموعه داده Riegl نشان دهنده درصد تطبیق بهتر است، در حالی که فاصله باقیمانده در 5 تغییر می کند. سانتی متر و برابر با باقی مانده برای داده های 550 هرتز است. مورد دیگری که این فرضیه را تأیید می کند، رابطه بین کرت های V8 و R8 با گونه های درخت یکسان (سوخاری)، تراکم توده و درختان نسبتاً بالاتر (~20 متر) است. تطابق نمودار V8 برابر با 63٪ است، در حالی که درصد تطبیق نمودار R8 برای داده های 380 هرتز و 550 هرتز به ترتیب 62٪ و 67٪ است.
علاوه بر این، کرت های صنوبر V4، R2، R3 و R4 دارای تراکم 208 درخت در هکتار و درختان نسبتاً بلند هستند. درصد تطبیق نمودار V4 52٪ است، در حالی که نمودارهای R2، R3 و R4 دارای محدوده تطبیقی از 29٪ تا 47٪ و 44٪ تا 54٪ برای داده های 380 هرتز و 550 هرتز هستند، با دقت تراز 31 سانتی متر. برای پلات V4 و حداکثر 39 سانتی متر برای سایر کرت ها. کاهش تراکم ساقه با همان ارتفاع درخت تنها با تغییر PRR (انرژی لیزر) یا ارتفاع پرواز (که برای پهپاد Velodyne کمتر است) بر درصد تطابق تأثیر میگذارد و فرکانس بالاتر Riegl (550 هرتز) تغییر در ارتفاع پرواز را جبران میکند. .
یکی دیگر از معیارهای ارزیابی، تأیید نتایج بر روی نقاط داده واقعی (محل درخت) است. ابتدا تقسیم بندی درختی برای ابرهای نقطه مبدا و هدف قبل از تراز و برای ابر نقطه هدف پس از تراز انجام می شود. سپس درختان تراز شده به صورت دستی بررسی می شوند. جدول 6 نتایج این آزمایش را بر روی نمودارهای آزمایشی Velodyne LiDAR نشان می دهد.
نتایج برای هر دو قطعه جنگلی صنوبر و چوب قرمز امیدوارکننده است. کمترین درصد درختان همسان برای کرت های صنوبر 44 درصد و مقدار متناظر برای کرت های مخروطی 50 درصد است. درصد درختان همسان برای قطعات صنوبر از 44٪ تا 59٪ در فاصله 1 متری متغیر است در حالی که محدوده مربوطه برای قطعات درختان مخروطی از 50٪ تا 88٪ در آستانه فاصله یکسان است. سپس این روش هنگام ارزیابی مکان درختان به نتایج قابل اعتمادی دست می یابد.
مقایسه با پایه
نتایج با روش پایه [ 8 ] مقایسه شد که ALS و ثبت اشتراک ابر نقطه فتوگرامتری زمینی را با استفاده از ویژگیهایی از فواصل پلانیمتری و عمودی بین مکانهای درختان در همان قطعه جنگلی انجام داد. آنها این فرآیند را به دو مرحله تقسیم کردند: تبدیل صلب دوبعدی (یک چرخش و دو ترجمه) و یک تصحیح افست عمودی. پارامترهای تبدیل دوبعدی بهینه با جستجوی اکتشافی بر روی مجموعه تناظرها با شروع از یک راه حل اولیه به دست می آیند. این روش در اینجا برای مکان های درختی هشت قطعه ارائه شده از تقسیم بندی ابر نقطه ای در نرم افزار LiDAR360 اعمال می شود [ 45 ]] که داده های ابر نقطه مبتنی بر هوا را بسته به حداکثر جهانی و شکاف بین درختان همسایه تقسیم می کند [ 46 ]. مقایسه در فضای دو بعدی بر روی انحرافات پلانیمتری در نقاط همسان قبل و بعد از تراز انجام می شود. جدول 7 ، که در آن روش پایه “بر اساس شی” نامیده می شود، نتایج مقایسه را در دو گروه فهرست می کند: برای پلات های صنوبر، درصد تطابق به ترتیب 3٪ تا 8٪ برای نمودار V2 و V1 افزایش می یابد. میانگین انحراف پس از تراز 3-6 سانتی متر بود به جز نمودار V2، که تفاوت معنی داری در فاصله پلان سنجی باقیمانده ندارد. در مقابل، کرتهای مخروطیها پارامترهای مختلفی را در خود جای میدهند که در نتیجه بر دقت تطبیق و همترازی تأثیر میگذارد.
نمودارهای آزمایشی V3 و V8 منجر به درصد تطبیق بالاتری نسبت به خط پایه شد. با این حال، V8 دارای تراکم ساقه بیش از سه برابر نمودار V3 است، و فاصله باقیمانده برای هر دو کرت به وضوح بالاتر از 10 سانتی متر در مقایسه با روش پایه افزایش یافته است. عامل کلیدی در اینجا ارتفاع درخت است، زیرا هر دو قطعه درختان بالاتری دارند. این را می توان با مورد نمودارهای V3 و V6 تأیید کرد. با این حال، آنها تراکم ساقه برابر است. تغییر در ارتفاع درخت بر دقت مکانیابی درخت تأثیر میگذارد زیرا درصد تطبیق روش پایه 16 درصد است و با استفاده از روش ما به 29 درصد افزایش مییابد زیرا روش مورد نظر به تقسیمبندی درخت بستگی ندارد. روش پایه تطابق بهتری در نمودار V7 به دست آورد، اما میانگین فاصله باقیمانده در نقاط همسان به میزان 13 سانتی متر در روش ما بهبود یافته است.
نتایج ارائه شده برای همه نمودارها نشان می دهد که همچنان تفاوت هایی بین نقاط کلیدی پس از تراز کردن وجود دارد، همانطور که در شکل 8 b-f نشان داده شده است. این تفاوت ها نشان دهنده عملکرد روش هم ترازی پیشنهادی است. دلایل این تفاوت ها عبارتند از دقت استخراج نقطه کلید، الگوریتم تطبیق و بهینه سازی تابع تبدیل. تراز نواری با روش معرفی شده ممکن است عملکرد خوبی در ارتفاع درختان کم تراکم یا بسیار کم نداشته باشد، جایی که تشخیص تاج پوشش چالش برانگیز است. با وجود تعداد زیادی آزمایش از جنگل کاشته شده که در این کار معرفی شده است، این روش باید در برابر یک مجموعه داده از یک توده جنگلی واقعی آزمایش شود.
6. نتیجه گیری و چشم انداز
این کار یک روش کاملاً خودکار را برای هم ترازی نوار پهپاد در مناطق جنگلی معرفی کرد، که فقط به وجود پوشش سایبان نیاز دارد، که مشخصه دادههای LiDAR است که توسط سیستم عاملهای مبتنی بر هوا جمعآوری شده است. علاوه بر این، یک خوشه بندی سایبان مبتنی بر چگالی با استفاده از الگوریتم HDBSCAN انجام می شود که تنها به یک پارامتر ورودی نیاز دارد و خوشه های اشکال دلخواه را بدون نیاز به پیش بینی تعداد خوشه ها کشف می کند. مزیت اصلی روش پیشنهادی، توانایی غلبه بر محدودیتهای محلیسازی درختان هنگام کار بر روی جنگلهای پیچیده (گونههای درختان برگریز، تراکم بالای ساقه و پوشش گیاهی نزدیک به زمین) یا محیطهای بادخیز است. علاوه بر این، این روش تبدیل 3 بعدی نوارهای همپوشانی را بدون هیچ گونه اطلاعات اضافی در مورد پارامترهای درختی انجام می دهد (به عنوان مثال، ارتفاع درخت و DBH) یا ارتفاعات از یک مدل ارتفاعی دیجیتال منطقه با استفاده از نقاط کلید مجازی. این روش بر روی هجده قطعه آزمایشی دایرهای شامل گونههای درخت سرخ چوب صنوبر و سپیدهدم با دو مطالعه موردی آزمایش شد: هشت قطعه (قطر 50 متر) از دادههای پهپاد Velodyne VLP-16 برداشت شد، در حالی که جفتهای باقیمانده (قطر 30 متر) انتخاب شدند. از داده های Riegl VUX-1 ارائه شده در دو PRF (380 هرتز و 550 هرتز). اختلاف فاصله اقلیدسی قبل و بعد از هم ترازی در نقاط منطبق برای ارزیابی نتایج هم ترازی مقایسه شد. محدوده انحرافات سه بعدی پس از تراز برای قطعات صنوبر از 31 سانتیمتر تا 36 سانتیمتر بود، در حالی که همان محدوده کرتهای چوب قرمز سپیدهدم از 28 سانتیمتر تا 31 سانتیمتر در مورد کرتهای پهپاد Velodyne بود. برای دو PRF ارائه شده توسط پهپاد Riegl، اختلافات سه بعدی در نقاط منطبق پس از تراز تفاوت معنی داری نداشتند، با مقادیر میانگین در قطعه های چوب سرخ سپیده دم 33 سانتی متر و 32 سانتی متر برای داده های 380 هرتز و 550 هرتز، به ترتیب، در حالی که مقادیر متناظر آنها 38 سانتی متر و 39 سانتی متر بود. برای توطئه های صنوبر داده های فرکانس بالا (550 هرتز) به طور مداوم درصد تطبیق بالاتری نسبت به نمودارهای فرکانس پایین (380 هرتز) به دلیل چگالی نقطه بالا ایجاد می کنند، در حالی که باقیمانده های فاصله سه بعدی پس از تراز برای هر دو فرکانس تفاوت قابل توجهی ندارند. عملکرد روش پیشنهادی برای ارتفاع درختان بسیار کم و/یا برای دادههایی با تراکم نقطه تاج بسیار کم ضعیف است، زیرا عمدتاً بر اساس خوشهبندی تاجپوش است. همچنین، آزمایشها به قطعات جنگلی کاشته شده محدود شد که در آن توپوگرافی مسطح، ساختار جنگلی منظم، و پارامترهای درختی تقریباً برابر در سطح نمودار وجود دارد. با این حال، تراز نواری ابرهای نقطهای از مزارع جنگلی به دلیل ویژگیهای جنگل کاشته شده، چالشبرانگیزتر از جنگلهای طبیعی است که تطبیق ویژگیها را پیچیدهتر میکند. بنابراین، تراز نواری ابرهای نقطهای از جنگلهای طبیعی به دلیل زمین ناهموارشان برای روش پیشنهادی چالش برانگیز خواهد بود، اما این میتواند با نرمالسازی ارتفاع با استفاده از یک DEM ایجاد شده از خود ابر نقطه انجام شود. تنوع گونههای درختی، شکلها و پارامترها در قطعات جنگلی طبیعی، که به نوبه خود شکلهای تاج نامنظمتری را ارائه میدهند، باید با روش پیشنهادی بررسی شوند. استفاده از روش پیشنهادی در تخمین پارامترهای معرف بیشتر جنگل، مانند حجم تاج پوشش و ارتفاع درخت، جالب خواهد بود.
















بدون دیدگاه