

چکیده
کلید واژه ها:
کاربری اراضی شهری ; داده های تحرک شهری ; چند منبعی ؛ بازنمایی پنهان ; خوشه بندی زیرفضا
1. مقدمه
1.1. استخراج ویژگیها از مجموعه دادههای تحرک شهری
1.2. روشهای طبقهبندی/خوشهبندی کاربری اراضی
1.3. حاشیه نویسی و تجزیه و تحلیل مناطق طبقه بندی شده
-
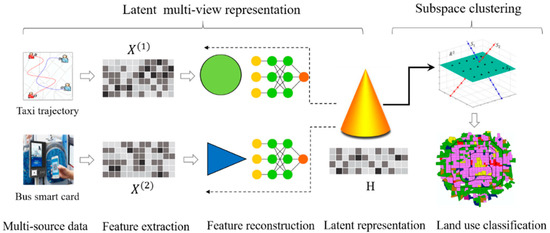
دادههای چند منبعی و پر سر و صدای تحرک شهری (به عنوان مثال، سیگنال GPS ممکن است توسط ساختمانهای شهری مسدود شود، در نتیجه منجر به ایجاد نویز میشود) ابتدا با اعمال تغییرات در تعداد نقاط مبدا/مقصد در طول زمان برای توصیف انواع کاربریهای زمین، ترکیب شدند. سپس یک بازنمایی چند نمای پنهان [ 32 ] برای ساختن ساختار زیربنایی مشترک، به اشتراک گذاشته شده توسط داده های تحرک شهری چند منبعی به کار گرفته شد.
-
ویژگیهای ابعادی بالا با استفاده از روش خوشهبندی زیرفضا [ 33 ] برای استنباط انواع کاربریهای زمین بر اساس نمایش چند نمای پنهان، مدیریت شدند.
-
نتایج تجربی نشان داد که در مقایسه با روش با استفاده از یک نوع مجموعه داده تحرک شهری و روش همجوشی وزنی، رویکرد ارائهشده در این مطالعه بالاترین نرخ تشخیص کاربری زمین را بهدست میآورد و مرجعی برای برنامهریزی شهری ارائه میدهد.
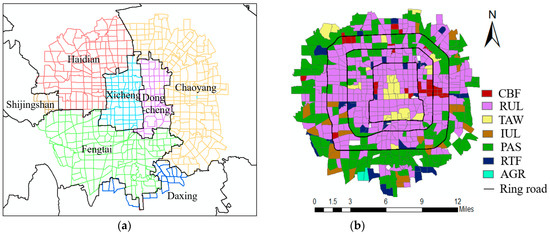
2. منطقه مطالعه و مجموعه داده ها
2.1. استخراج ویژگیها از مجموعه دادههای تحرک شهری
2.2. مجموعه داده ها
3. روش
3.1. استخراج ویژگی خوشه بندی
- (من)
-
بردار ویژگی تحویل در روزهای هفته/آخر هفته: برای اندازه گیری تعداد مسافرانی که در طول روزهای هفته یا آخر هفته سوار اتوبوس می شوند، استفاده شد که می تواند به عنوان یک بردار 16 بعدی به عنوان فرمول مشخص شود.
[Ow1،…،Ow16] or [Or1،…،Or16]،جایی که Owمنو Orمننشان دهنده تعداد وانت در منتیساعتساعت در روزهای هفته و آخر هفته نمادهای زیر همین معنی را دارند.
- (II)
-
بردار ویژگی تنظیم روز هفته/آخر هفته: شبیه به ویژگی I، این نیز یک بردار 16 بعدی است که می توان آن را به صورت مشخص کرد.
[Dw1،…،Dw16] or [Dr1،…،Dr16].Dwمنو Drمننشان دهنده تعداد تنظیمات در منتیساعتساعت در روزهای هفته و آخر هفته
- (III)
-
بردار ویژگی پیک آپ روزانه: این ویژگی ترکیبی از ویژگی های پیک آپ در روزهای هفته و آخر هفته است که تعداد کل پیک آپ ها را در روزهای هفته و آخر هفته اندازه گیری می کند. شکل این بردار 32 بعدی است
[Ow1،…،Ow16،Or1،…،Or16] - (IV)
-
بردار ویژگی کاهش روزانه: مشابه ویژگی III، بردار ویژگی تنظیم پایین روزانه نیز یک بردار 32 بعدی است که به صورت مشخص شده است.
[Dw1،…،Dw16،Dr1،…،Dr16]. - (V)
-
بردار ویژگی تفاوت Pick-up/set-down: این ویژگی تفاوت بین شماره برداشت و عدد پایین آمدن را به صورت اندازه گیری می کند.
[Ow1-Dw1،…،Ow16-Dw16،Or1-Dr1،…،Or16-Dr16]. - (VI)
-
بردار ویژگی نسبت برداشتن/تنظیم کردن: مشابه ویژگی V، بردار 32 بعدی نسبت عدد برداشتن و عدد پایین آمدن را به صورت اندازه گیری می کند.
[Ow1/Dw1،…،Ow16/Dw16،Or1/Dr1،…،Or16/Dr16]. - (VII)
-
بردار ترکیبی برداشت و پایین آمدن روزانه: این ویژگی یک بردار 64 بعدی است که جریان کل در طول روز را اندازه گیری می کند.
[Ow1،…،Ow16،Or1،…،Or16،Dw1،…،Dw16،Dr1،…،Dr16].
3.2. نمایش پنهان چند نمای
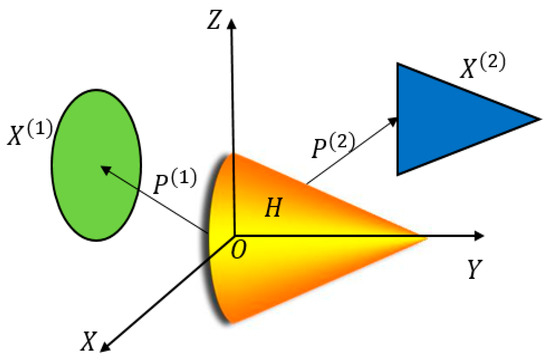
این مطالعه فرض میکرد که دادههای تحرک شهری چند منبعی از یک نمایش نهفته زیربنایی سرچشمه میگیرد. همانطور که در شکل 4 نشان داده شده است ، ن مشاهدات از Vنماها را می توان به صورت نمایش داد
هدف از بازنمایی چند نمای پنهان به دست آوردن بود اچ=[ساعت1،ساعت2،…،ساعتن]توسط مدل های طرح ریزی پ=[پ(1)،پ(2)،…،پ(V)].در مقایسه با دادههای تک منبع مغرضانه، این نمایش چند نمای پنهان مشترک، اطلاعات ثابت ضروری را از چندین نما ترکیب میکند. تابع هدف را می توان به صورت بیان کرد دقیقهپ،اچLساعت(ایکس،پاچ)، جایی که Lساعتتابع ضرر بازسازی را از نمایش پنهان تا ویژگی های چند نمایه نشان می دهد [ 35 ].
برای ایجاد روابط بین نمایش چند نمای پنهان و ویژگیها از نماهای فردی، از یک شبکه عصبی BP برای ثبت این برهمکنش پیشبینی غیرخطی استفاده شد و تابع هدف به صورت [ 32 ] فرموله شد.
جایی که gθv(اچ)=دبلیو(ک،v)f(دبلیو(ک-1،v)…f(دبلیو(1،v)اچ))مدل شبکه عصبی را نشان می دهد. f(آ)=برنزه(آ)=1-ه2آ1+ه-2آتابع فعال سازی است و دبلیو(ک،v)ماتریس وزن را نشان می دهد کتیساعتلایه به (ک+1)تیساعتلایه در vتیساعتچشم انداز. Lvتلفات بازسازی را از بازنمایی نهفته به ویژگی های مشاهده شده در زیر اندازه گیری می کند vتیساعتچشم انداز. αvپارامتر مبادله است.
3.3. خوشه بندی زیرفضا
خوشه بندی زیرفضا یک تکنیک موثر برای برخورد با داده های با ابعاد بالا است [ 33 ، 36 ، 37 ]. فرض میکند که نقاط داده با ابعاد بالا در چندین زیرفضا با ابعاد پایین قرار دارند [ 38 ]. در این مطالعه، خوشهبندی زیرفضا بر اساس ویژگی خود بازنمایی دادههای با ابعاد بالا انجام شد [ 39 ]، که در آن هر نقطه داده با ابعاد بالا ایکسمنرا می توان به صورت ترکیبی از نکات دیگر بیان کرد ایکسj (من≠j). فرمول به طور کلی می تواند بیان شود
جایی که ز=[z1،z2،…،zn]∈آرn×nماتریس نمایش زیرفضا (ماتریس ضریب بازسازی) است. zمننمایش شباهت نقطه داده اصلی است ایکسمنبر اساس فضای فرعی ایکس=[ایکس1،ایکس2،…،ایکسn]ویژگی های استخراج شده از nمشاهدات در این مطالعه، بازنمایی چند نمای پنهان اچبه عنوان ویژگی استفاده شد ایکس. بنابراین، تابع هدف خوشه بندی زیرفضا را می توان با ترکیب مشترک فرمول های (9) و (10) به دست آورد:
زبرای ساخت ماتریس شباهت با اس=آبس(ز)+آبس(زتی)برای خوشه بندی طیفی [ 40 ]. تابع هدف در فرمول (11) را می توان در دو مرحله زیر بهینه کرد [ 32 ]:
- (من)
-
به روز رسانی پارامترهای شبکه عصبی BP با استفاده از الگوریتم گرادیان نزول. شبکه عصبی BP از دو لایه پنهان تشکیل شده است دبلیو(1،v)و دبلیو(2،v). اولین، دبلیو(1،v)و اچبه طور تصادفی مقداردهی اولیه شدند. دوم، تابع ضرر Lw=αv2∥ایکسv-دبلیو(2،v)f(دبلیو(1،v)اچ)∥اف2و عملکرد فعال سازی مv=تیآnساعت(دبلیو(1،v)اچ)تعریف شدند. برای هر نما، به روز شد دبلیو(1،v)=دبلیو(1،v)-η∂Lwدبلیو(1،v)و دبلیو(2،v)=ایکسvمvتی(مvمvتی+γαv)-1، دبلیو(1،v)و دبلیو(2،v)تا زمانی که خطای بازسازی به اندازه کافی کوچک نباشد می توان خروجی داد.
- (II)
-
حل و بهینه سازی. اولین، اچبا استفاده از الگوریتم گرادیان نزول با به روز شد Lاچ=12∥اچ-اچز∥اف2+∑v=1Vαv2∥ایکسv-دبلیو(2،v)f(دبلیو(1،v)اچ)∥اف2. دومین، زبه طور مکرر با استفاده از روش جهت متناوب الگوریتم ضرب [ 41 ] به روز شد.
4. نتایج و بحث
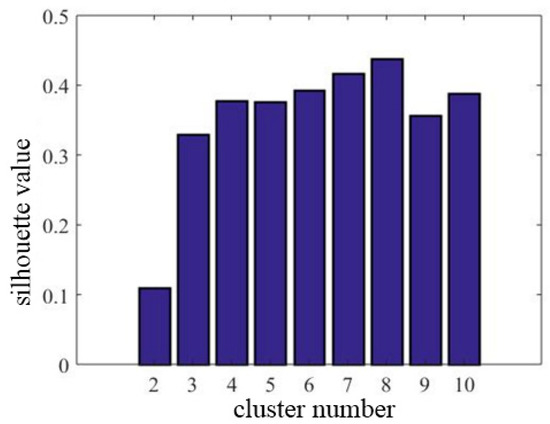
4.1. روش های مقایسه ای و تنظیم پارامتر
- (من)
-
روشها با استفاده از یک نوع از دادههای تحرک شهری [ 9 ]: مسیر GPS تاکسی یا دادههای کارت هوشمند اتوبوس برای ساخت بردارهای ویژگی استفاده شد. برای خوشهبندی TAZها از خوشهبندی طیفی استفاده شد کانواع کاربری زمین بر اساس بردارهای ویژگی استخراج شده آنها.
- (II)
-
روش همجوشی وزنی [ 23 ]: دو ماتریس شباهت دبلیوتیآایکسمن، دبلیوبتوسابتدا برای مسیر تاکسی و داده های کارت هوشمند اتوبوس محاسبه شد. سپس، ماتریس شباهت یکپارچه دبلیوبه عنوان محاسبه شد دبلیو=α1دبلیوتیآایکسمن+α2دبلیوبتوس. α1و α2دو وزن با نسبت تاکسی سواری و اتوبوس سواری تعیین می شود. در آزمایش، α1و α2به ترتیب 96.34% و 4.66% بودند. ماتریس شباهت W به عنوان ورودی برای خوشه بندی طیفی ارائه شد.
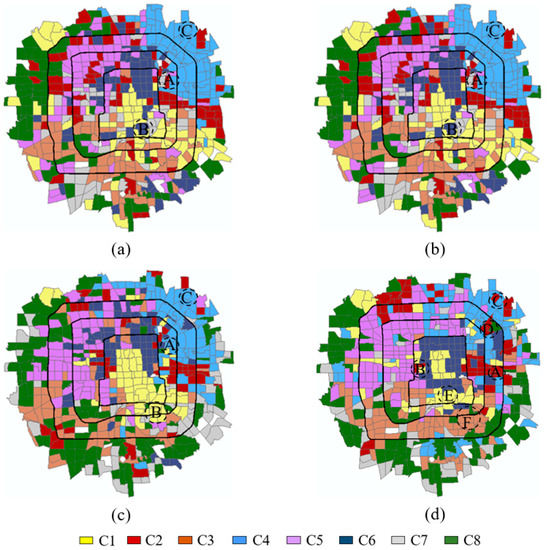
4.2. حاشیه نویسی انواع کاربری اراضی شهری
- (من)
-
FD و CR POI در هر خوشه ( جدول 3 ):
FDij=عدد از را منهفتم دسته بندی از POI که در خوشه jرا حوزه از خوشه jCRij=عدد از را منهفتم دسته بندی از POI که در خوشه jرا عدد از POI که در خوشه j×100% - (II)
-
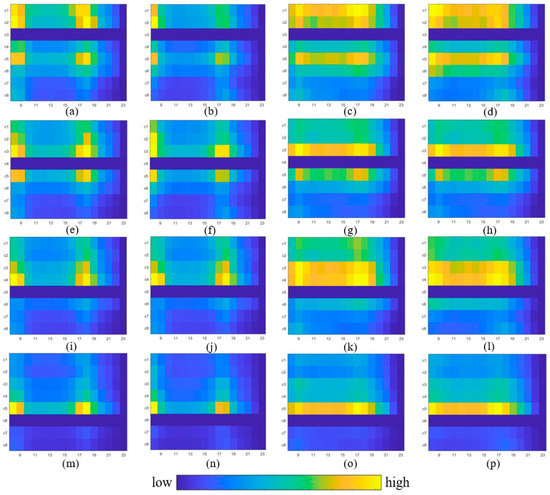
ماتریسهای انتقالی ورود/خروج: همانطور که در شکل 7 نشان داده شده است ، محورهای افقی نشاندهنده زمان در طول روز از ساعت 8:00 تا 24:00 است، و محورهای عمودی نشاندهنده خوشههایی هستند که مسافران به آنها میرسند یا میروند.
4.2.1. جاذبه های گردشگری و مناطق آبی (C1)
4.2.2. مناطق تجاری توسعه یافته (C2)
4.2.3. مناطق مسکونی کمتر توسعه یافته (C3)
4.2.4. مناطق مسکونی نوظهور (C4)
4.2.5. مناطق مسکونی توسعه یافته (C5)
4.2.6. مناطق مسکونی/تفریحی/تجاری (C6)
4.2.7. مدیریت و خدمات عمومی (C8)
4.2.8. مناطق خدمات صنعتی/حمل و نقل (C7)
4.3. مقایسه و تحلیل کمی
4.4. بحث
4.4.1. عدم تطابق بین ویژگی های کالبدی و کارکرد اجتماعی زمین شهری
4.4.2. تأثیر ساخت ویژگی
4.4.3. تأثیر مدل بازنمایی چند نمای پنهان
- (من)
-
با استفاده از روش خوشهبندی چند نمای پنهان، انواع کاربریهای زمین پیچیدهتر را میتوان شناسایی کرد. به عنوان مثال، مناطق مسکونی را می توان بیشتر به مناطق مسکونی توسعه یافته، مناطق مسکونی کمتر توسعه یافته و مناطق مسکونی نوظهور تقسیم کرد. این تقسیم بندی پیچیده به برنامه ریزان شهری کمک می کند تا سیاست های هدفمندتر و مؤثرتری برای برنامه ریزی شهری تدوین کنند.
- (II)
-
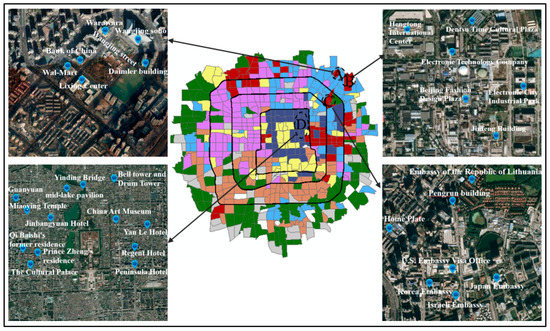
برخی کالیبراسیون ها ممکن است برای برنامه ریزی کاربری اراضی شهری ارائه شود. در نقشه کاربری اراضی دولتی، مناطق A، B، C و D به ترتیب به عنوان مناطق خدمات حمل و نقل، صنعتی، اداری و خدماتی دولتی و مناطق مسکونی برچسب گذاری شدند. مناطق A، B و C همگی به مناطق تجاری تبدیل شدند. همانطور که در شکل 9 نشان داده شده است، نقطه عطف منطقه A خیابان وانگجینگ است که یکی از مناطق تجاری نوظهور در پکن است. منطقه B عمدتاً شامل مرکز تجارت بین المللی Hengtong و برخی از شرکت های فناوری است. منطقه C یک منطقه تجمع سفارت است که شامل سفارت ایالات متحده، سفارت کره، سفارت ژاپن و سفارت اسرائیل است. منطقه D ترکیبی از مناطق مسکونی، تفریحی و تجاری است. خوشههای کشفشده با استفاده از روش خوشهبندی چند نمای پنهان، برای شناسایی انواع کاربریهای زمین از منظر فعالیتهای انسانی مفید هستند و میتوانند برنامهریزی شهری را انسان محورتر کنند.
5. نتیجه گیری ها
منابع
- الیس، ای. تغییر کاربری و پوشش زمین. در دسترس آنلاین: https://editors.eol.org/eoearth/wiki/Land-use_and_land-cover_change (در 8 مارس 2021 قابل دسترسی است).
- ویلیامسون، آی. Enemark، S. والاس، جی. رجبی فرد، الف. آمایش سرزمین برای توسعه پایدار ; Emerald Group Publishing Limited: Emerald, UK, 2010; پ. 324. [ Google Scholar ]
- لی، اس. دراگیسویچ، اس. کاسترو، FA; سستر، ام. زمستان، م. Coltekon، A. تئوری و روش های مدیریت داده های بزرگ جغرافیایی: بررسی و چالش های تحقیق. ISPRS J. Photogramm. Remote Sens. 2016 ، 115 ، 119-133. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- هوانگ، ایکس. Zhang، L. یک رویکرد گروهی SVM که ویژگیهای طیفی، ساختاری و معنایی را برای طبقهبندی تصاویر سنجش از دور با وضوح بالا ترکیب میکند. IEEE Trans. Geosci. Remote Sens. 2013 ، 51 ، 257-272. [ Google Scholar ] [ CrossRef ]
- بلاشکه، تی. هی، GJ; کلی، م. لانگ، اس. هافمن، پی. Addink، E. تجزیه و تحلیل تصویر مبتنی بر شی جغرافیایی – به سمت یک پارادایم جدید. ISPRS J. Photogramm. Remote Sens. 2014 ، 87 ، 180-191. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- ژو، دبلیو. مینگ، دی. Lv، X.; ژو، ک. Bao، H. SO-CNN بر اساس تقسیم بندی دقیق منطقه عملکردی شهری با تصویر سنجش از دور VHR. سنسور از راه دور محیط. 2019 ، 236 ، 111458. [ Google Scholar ] [ CrossRef ]
- لیو، ی. لیو، ایکس. گائو، اس. گونگ، ال. کانگ، سی. ژی، ی. چی، جی. شی، ال. حس اجتماعی: رویکردی جدید برای درک محیط های اجتماعی-اقتصادی ما. ان دانشیار صبح. Geogr. 2015 ، 105 ، 512-530. [ Google Scholar ] [ CrossRef ]
- یائو، ی. لی، ایکس. لیو، ایکس. لیو، پی. لیانگ، ز. ژانگ، جی. Mai، K. سنجش توزیع فضایی کاربری زمین شهری با ادغام نقاط مورد علاقه و مدل Google Word2Vec. بین المللی جی. جئوگر. Inf. علمی 2017 ، 31 ، 825-848. [ Google Scholar ] [ CrossRef ]
- پان، جی. چی، جی. وو، زی. ژانگ، دی. Li, S. طبقه بندی کاربری زمین با استفاده از ردیابی GPS تاکسی. IEEE Trans. هوشمند ترانسپ سیستم 2013 ، 14 ، 113-123. [ Google Scholar ] [ CrossRef ]
- لانگ، ی. Shen, Z. کشف مناطق عملکردی با استفاده از داده های کارت هوشمند اتوبوس و نقاط مورد علاقه در پکن. در تجزیه و تحلیل جغرافیایی برای حمایت از برنامه ریزی شهری در پکن ; Long, Y., Shen, Z., Eds.; Springer: برلین، آلمان، 2015; جلد 116، صص 193–217. [ Google Scholar ]
- آهنگ، سی. Qu، Z. بلوم، ن. برعباسی، ع. محدودیتهای پیشبینیپذیری در تحرک شهری. Science 2010 ، 327 ، 1018-1021. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- سوتسوک، ا. راتی، سی. آیا تحرک شهری یک روال روزانه دارد؟ یادگیری از داده های کل شبکه های تلفن همراه. J. فناوری شهری. 2010 ، 17 ، 41-60. [ Google Scholar ] [ CrossRef ]
- پی، تی. سوبولفسکی، اس. راتی، سی. لی، تی. ژو، سی. بینشی جدید در طبقه بندی کاربری زمین بر اساس داده های تلفن همراه جمع آوری شده است. بین المللی جی. جئوگر. Inf. علمی 2014 ، 28 ، 1988-2007. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- آحاس، ر. مارک، Ü. خدمات مبتنی بر مکان – چالش های جدید برای برنامه ریزی و مدیریت دولتی؟ آتی 2015 ، 37 ، 547-561. [ Google Scholar ] [ CrossRef ]
- چی، جی. لی، ایکس. لی، اس. پان، جی. وانگ، ز. ژانگ، دی. اندازه گیری کارکردهای اجتماعی مناطق شهر از رفتارهای تاکسی در مقیاس بزرگ. در مجموعه مقالات کنفرانس بین المللی IEEE 2011 در کارگاه های آموزشی فراگیر محاسبات و ارتباطات، سیاتل، WA، ایالات متحده آمریکا، 21-25 مارس 2011. صص 384-388. [ Google Scholar ]
- لیو، ی. وانگ، اف. شیائو، ی. گائو، جنوب. استفاده از زمین شهری و ترافیک “مناطق منبع غرق”: شواهد از داده های تاکسی مجهز به GPS در شانگهای. Landsc. طرح شهری. 2012 ، 106 ، 73-87. [ Google Scholar ] [ CrossRef ]
- سوتو، وی. Frias-Martinez, E. شناسایی خودکار کاربری زمین با استفاده از سوابق تلفن همراه. در مجموعه مقالات سومین کارگاه بین المللی ACM در MobiArch، Bethesda، MD، ایالات متحده، 28 ژوئن 2011; صص 17-22. [ Google Scholar ]
- تول، جی. اولم، ام. بائر، دی. گونزالس، ام. استنباط کاربری زمین از فعالیت تلفن همراه. در مجموعه مقالات کارگاه بین المللی ACM SIGKDD در محاسبات شهری، پکن، چین، 12 اوت 2012. صص 1-8. [ Google Scholar ]
- فن، ک. ژانگ، دی. وانگ، ی. ژائو، اس. کشف مناطق عملکردی اجتماعی شهری با استفاده از مسیرهای تاکسی. در مجموعه مقالات دوازدهمین کنفرانس بین المللی IEEE 2015 در مورد هوش و محاسبات همه جا حاضر، پکن، چین، 10 تا 14 اوت 2015؛ صص 356-359. [ Google Scholar ]
- Mazimpaka، JD; Timpf، S. بررسی پتانسیل ترکیب GPS تاکسی و داده های فلیکر برای کشف مناطق عملکردی. در مجموعه مقالات هجدهمین کنفرانس آزمایشگاه های اطلاعات جغرافیایی-جغرافیایی-جغرافیایی-برای-اروپا در زمینه علوم اطلاعات جغرافیایی، لیسبون، پرتغال، 9 تا 12 ژوئن 2015. صص 3-18. [ Google Scholar ]
- Mou، X. کای، اف. ژانگ، ایکس. چن، جی. Zhu، RR شناسایی عملکرد شهری بر اساس داده های POI و مسیر تاکسی. در مجموعه مقالات سومین کنفرانس بین المللی 2019 در تحقیقات کلان داده، پاریس، فرانسه، 20 نوامبر 2019؛ صص 152-156. [ Google Scholar ]
- لیو، ایکس. تیان، ی. ژانگ، ایکس. Wan, Z. شناسایی مناطق عملکردی شهری در چنگدو بر اساس دادههای سری زمانی مسیر تاکسی. بین المللی J. Geo-Inf. 2020 ، 9 ، 158. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- یو، م. کانگ، سی. آندریس، ا. Qin، K. لیو، ی. منگ، کیو. درک تعامل بین پویایی اتوبوس، مترو و تاکسی سواری در شنژن، چین. ترانس. GIS 2018 ، 22 ، 855-871. [ Google Scholar ] [ CrossRef ]
- ژای، دبلیو. بای، ایکس. شی، ی. هان، ی. پنگ، ز. Gu, C. Beyond word2vec: رویکردی برای استخراج و شناسایی منطقه عملکردی شهری با ترکیب place2vec و POI. محاسبه کنید. محیط زیست سیستم شهری 2019 ، 74 ، 1-12. [ Google Scholar ] [ CrossRef ]
- یوان، جی. ژنگ، ی. Xie, X. کشف مناطق با عملکردهای مختلف در یک شهر با استفاده از تحرک شهری و POI. در مجموعه مقالات هجدهمین کنفرانس بین المللی ACM SIGKDD در مورد کشف دانش و داده کاوی، پکن، چین، 12 تا 16 اوت 2012. ص 186-194. [ Google Scholar ]
- یوان، ن. ژنگ، ی. Xie، X. وانگ، ی. ژنگ، ک. Xiong، H. کشف مناطق عملکردی شهری با استفاده از مسیرهای فعالیت پنهان. IEEE Trans. بدانید. مهندسی داده 2015 ، 27 ، 712-725. [ Google Scholar ] [ CrossRef ]
- ژانگ، ایکس. خو، ی. تو، دبلیو. Ratti, C. آیا مجموعه داده های مختلف داستان یکسانی را در مورد تحرک شهری بیان می کنند – مطالعه مقایسه ای استفاده از حمل و نقل عمومی و تاکسی. J. Transp. Geogr. 2018 ، 70 ، 78-90. [ Google Scholar ] [ CrossRef ]
- تو، دبلیو. کائو، آر. یو، ی. ژو، بی. لی، کیو. تغییرات فضایی در رفت و آمدهای عمومی شهری به دست آمده از مسیرهای GPS و داده های کارت هوشمند. J. Transp. Geogr. 2018 ، 69 ، 45-57. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- تو، دبلیو. زو، تی. شیا، جی. ژو، ی. لای، ی. جیانگ، جی. لی، کیو. به تصویر کشیدن پویایی فضایی سرزندگی شهری با استفاده از داده های بزرگ شهری چند منبعی. محاسبه کنید. محیط زیست سیستم شهری 2020 , 80 , 101428. [ Google Scholar ] [ CrossRef ]
- میلر، اچ. Goodchild، M. جغرافیای داده محور. GeoJournal 2015 ، 80 ، 449-461. [ Google Scholar ] [ CrossRef ]
- لیو، جی. لی، جی. لی، دبلیو. Wu, J. بازاندیشی کلان داده: مروری بر کیفیت داده ها و مسائل استفاده. ISPRS J. Photogramm. Remote Sens. 2016 ، 115 ، 134-142. [ Google Scholar ] [ CrossRef ]
- ژانگ، سی. فو، اچ. هو، کیو. کائو، ایکس. زی، ی. تائو، دی. Xu, D. خوشهبندی زیرفضای چند نمای پنهان تعمیم یافته. IEEE Trans. الگوی مقعدی ماخ هوشمند 2020 ، 42 ، 86-99. [ Google Scholar ] [ CrossRef ]
- پارسونز، L. خوشه بندی زیرفضا برای داده های با ابعاد بالا: یک بررسی. در خبرنامه اکتشافات ACM SIGKDD ; فیاض، U.، ویرایش. انجمن ماشینهای محاسباتی: نیویورک، نیویورک، ایالات متحده آمریکا، 2004. جلد 6، ص 90–105. [ Google Scholar ]
- چنگ، جی. لیو، جی. گائو، ی. تجزیه و تحلیل ویژگیهای مکانی-زمانی حجم سفر OD پکن بر اساس روش خوشهبندی سریهای زمانی. بین المللی J. Geo-Inf. 2016 ، 18 ، 1227-1239. [ Google Scholar ]
- ژانگ، سی. هو، کیو. فو، اچ. زو، پی. کائو، X. خوشهبندی زیرفضای چند نمای پنهان. در مجموعه مقالات کنفرانس IEEE در مورد دید رایانه و تشخیص الگو، هونولولو، هاوایی، 22 تا 25 ژوئیه 2017؛ صص 79-4287. [ Google Scholar ]
- لیو، جی. لین، ز. یان، اس. سان، ج. یو، ی. Ma، Y. بازیابی قوی ساختارهای زیرفضایی با نمایش رتبه پایین. IEEE Trans. الگوی مقعدی ماخ هوشمند 2010 ، 35 ، 171-184. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- Guo, Y. آموزش بازنمایی زیرفضای محدب از دادههای چند نمای. در مجموعه مقالات کنفرانس AAAI در مورد هوش مصنوعی، Bellevue، WA، ایالات متحده، 14-18 ژوئیه 2013; صص 387-393. [ Google Scholar ]
- گائو، اچ. نی، اف. لی، XL; Huang, H. خوشه بندی زیرفضای چند نمای. در مجموعه مقالات کنفرانس بین المللی IEEE در سال 2015 در بینایی کامپیوتر، سانتیاگو، شیلی، 7 تا 13 دسامبر 2015؛ صص 4238-4246. [ Google Scholar ]
- الهامی فر، ا. ویدال، آر. خوشه بندی زیرفضای پراکنده: الگوریتم، نظریه و کاربردها. IEEE Trans. الگوی مقعدی ماخ هوشمند 2012 ، 35 ، 2765-2781. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- نگ، ا. جردن، م. Weiss, Y. در مورد خوشه بندی طیفی: تجزیه و تحلیل و یک الگوریتم. در پیشرفت در سیستم های پردازش اطلاعات عصبی ; تننباوم، جی.، گریفیث، تی.، ویرایش. Morgan Kaufmann Publishers: San Francisco, CA, USA, 2001; جلد 14، صص 849–856. [ Google Scholar ]
- هان، دی. یوان، X. نکته ای در مورد روش جهت متناوب ضرایب. J. Optim. تئوری کاربردی 2012 ، 155 ، 227-238. [ Google Scholar ] [ CrossRef ]
- Rousseeuw, P. Silhouettes: A Graphical Aid to the Interpretation and Validation of Cluster Analysis. جی. کامپیوتر. Appl. ریاضی. 1987 ، 20 ، 53-65. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- لیو، ایکس. او، جی. یائو، ی. ژانگ، جی. لیانگ، اچ. وانگ، اچ. Hong, Y. طبقه بندی کاربری زمین شهری با ادغام داده های سنجش از دور و رسانه های اجتماعی. بین المللی جی. جئوگر. Inf. علمی 2017 ، 31 ، 1675-1696. [ Google Scholar ] [ CrossRef ]



بدون دیدگاه