

خلاصه
سرعت متوسط برای محاسبه زمان سفر لینک برای یافتن سریعترین مسیر در شبکه جاده بسیار مهم است. با این حال، منابع داده به راحتی در دسترس مانند OpenStreetMap (OSM) اغلب اطلاعاتی در مورد میانگین سرعت یک جاده ندارند. با این حال، OSM حاوی اطلاعات جاده دیگری است که تخمین میانگین سرعت را در مناطق روستایی امکان پذیر می کند. در این مقاله، ما یک چارچوب فازی برای تخمین سرعت (Fuzzy-FSE) ایجاد میکنیم که از کنترل فازی برای تخمین سرعت متوسط بر اساس پارامترهای کلاس جاده، شیب جاده، سطح جاده و طول پیوند استفاده میکند. شبکه جاده ای OSM و به صورت اختیاری، یک مدل ارتفاعی دیجیتال (DEM) به عنوان داده ورودی رایگان و در دسترس در سراسر جهان عمل می کند. Fuzzy-FSE از دو بخش تشکیل شده است: (الف) یک قانون و پایگاه دانش که در مورد توابع عضویت خروجی تصمیم میگیرد و (ب) سیستمهای کنترل فازی متعدد که میانگین سرعتهای خروجی را محاسبه میکنند. فازی-FSE برای منطقه BioBío و Maule در مرکز شیلی و برای شمال نیو ساوت ولز در استرالیا بهطور مثالی اعمال و ارزیابی میشود. نتایج نشان میدهد که حتی با استفاده از دادههای OSM، فازی-FSE بهتر از روشهای موجود مانند پروفایلهای سرعت ثابت عمل میکند. در مقایسه با این روشها، Fuzzy-FSE تخمین سرعت را بین 2 تا 12 درصد بهبود میبخشد. در کار آینده، پتانسیل روشهای یادگیری ماشین مبتنی بر داده را برای تخمین سرعت متوسط بررسی خواهیم کرد. مجموعه داده های اعمال شده و کد منبع Fuzzy-FSE از طریق GitHub در دسترس هستند. فازی-FSE برای منطقه BioBío و Maule در مرکز شیلی و برای شمال نیو ساوت ولز در استرالیا بهطور مثالی اعمال و ارزیابی میشود. نتایج نشان میدهد که حتی با استفاده از دادههای OSM، فازی-FSE بهتر از روشهای موجود مانند پروفایلهای سرعت ثابت عمل میکند. در مقایسه با این روشها، Fuzzy-FSE تخمین سرعت را بین 2 تا 12 درصد بهبود میبخشد. در کار آینده، پتانسیل روشهای یادگیری ماشین مبتنی بر داده را برای تخمین سرعت متوسط بررسی خواهیم کرد. مجموعه داده های اعمال شده و کد منبع Fuzzy-FSE از طریق GitHub در دسترس هستند. فازی-FSE برای منطقه BioBío و Maule در مرکز شیلی و برای شمال نیو ساوت ولز در استرالیا بهطور مثالی اعمال و ارزیابی میشود. نتایج نشان میدهد که حتی با استفاده از دادههای OSM، فازی-FSE بهتر از روشهای موجود مانند پروفایلهای سرعت ثابت عمل میکند. در مقایسه با این روشها، Fuzzy-FSE تخمین سرعت را بین 2 تا 12 درصد بهبود میبخشد. در کار آینده، پتانسیل روشهای یادگیری ماشین مبتنی بر داده را برای تخمین سرعت متوسط بررسی خواهیم کرد. مجموعه داده های اعمال شده و کد منبع Fuzzy-FSE از طریق GitHub در دسترس هستند. فازی-FSE تخمین سرعت را بین 2 تا 12 درصد بهبود می بخشد. در کار آینده، پتانسیل روشهای یادگیری ماشین مبتنی بر داده را برای تخمین سرعت متوسط بررسی خواهیم کرد. مجموعه داده های اعمال شده و کد منبع Fuzzy-FSE از طریق GitHub در دسترس هستند. فازی-FSE تخمین سرعت را بین 2 تا 12 درصد بهبود می بخشد. در کار آینده، پتانسیل روشهای یادگیری ماشین مبتنی بر داده را برای تخمین سرعت متوسط بررسی خواهیم کرد. مجموعه داده های اعمال شده و کد منبع Fuzzy-FSE از طریق GitHub در دسترس هستند.
کلید واژه ها:
OpenStreetMap ; مدل دیجیتال ارتفاع ; سیستم کنترل فازی ; مسیریابی ; پیوند زمان سفر
1. معرفی
کاربردهایی مانند برنامه ریزی مسیر، مدیریت ریسک بلایا یا حمل و نقل به یافتن سریع ترین مسیر در یک شبکه جاده بستگی دارد. برای محاسبه سریعترین مسیر، مقادیر میانگین سرعت به هر لبه در شبکه جاده اختصاص داده می شود تا زمان سفر پیوند محاسبه شود. زمان سفر لینک میانگین زمانی است که یک وسیله نقلیه صرف سفر در لبه شبکه می کند [ 1 ]. در مطالعات مربوط به زیرساخت های حیاتی جاده و دسترسی، زمان سفر پیوند اغلب به عنوان یک عامل هزینه برای شبکه راه ها عمل می کند [ 2 ، 3 ، 4 ، 5 ].
بسیاری از این رویکردها از داده های OpenStreetMap (OSM) استفاده می کنند. پروژه OSM داده های رایگان شبکه جاده ای را در سراسر جهان ارائه می دهد که توسط داوطلبان در سراسر جهان جمع آوری و نگهداری می شود. همه می توانند به عنوان کاربر OSM ثبت نام کنند و شرکت کنند. Barrington-Leigh و Millard-Ball [ 6 ] در سال 2017 به این نتیجه رسیده اند که شبکه جاده ای OSM بیش از 80٪ کامل شده است. علاوه بر این، 40٪ از همه کشورهای موجود در مجموعه داده های OSM در سراسر جهان دارای یک شبکه جاده ای کاملاً نقشه برداری شده هستند. با توجه به ویژگی باز و آزاد OSM، بسیاری از رویکردها با استفاده از داده های آن، سوال کیفیت داده را مطرح کردند که باعث تعدادی از تحقیقات در مورد آن موضوع شد. برای خلاصه کردن نتایج، OSM می تواند دقیق و کامل باشد و در برخی مناطق می تواند با مجموعه داده های تجاری یا اداری رقابت کند یا حتی بهتر از آن باشد [ 7 ، 8 ], 9 , 10 , 11 , 12 , 13 , 14 ]. در برخی از کشورهای در حال توسعه، کامل بودن شبکه راه ها در سطح ملی بالا است [ 15 ، 16 ].
داده های شبکه جاده OSM را می توان به یک ساختار داده توپولوژیکی برای استفاده در برنامه های مسیریابی وارد کرد. در حالی که کیفیت شبکه جاده برای اکثر رویکردها رضایت بخش است، ویژگی های اضافی برای لبه های آن برای مسیریابی مورد نیاز است. در OSM، این امکان وجود دارد که ویژگی های اضافی را برای هر عنصر جاده در نظر بگیرید. به این ترتیب، اطلاعات حداکثر سرعت برای هر عنصر جاده را می توان اضافه کرد. با این حال، بیشتر جاده ها فاقد این اطلاعات هستند. شکل 1 نسبت طول کل جاده های سطح بالا (همانطور که در جدول 1 تعریف شده است ) را با اطلاعات حداکثر سرعت در هر کشور نشان می دهد. فقط 7.47.4درصد از تمام عناصر جاده در مجموعه داده جهانی OSM منتشر شده در اکتبر 2019 دارای اطلاعات حداکثر سرعت هستند. با این حال، برای محاسبه زمان سفر لینک و سریعترین مسیرها، اطلاعات حداکثر سرعت برای هر لبه در شبکه جاده بسیار مهم است.
عوامل موثر بر میانگین سرعت در مناطق شهری و روستایی به دلایل زیادی متفاوت است. در حالی که ترافیک، محدودیت های پیچ، خیابان های یک طرفه و علائم راهنمایی و رانندگی تأثیر محسوسی بر میانگین سرعت شهر دارند، عوامل دیگری در مناطق روستایی غالب هستند. به عنوان مثال، کیفیت جاده تأثیر قابل توجهی بر میانگین سرعت دارد: جادههای آسفالته، بهعنوان مثال، سرعت بالاتری نسبت به جادههای شنی یا گلی بدون آببندی دارند. عرض جاده و تعداد خطوط نیز بر سرعت و همچنین توپوگرافی تأثیر دارد [ 17 ]. شیب جاده سرعت رانندگی را هم با افزایش سینووسیت و هم با خود شیب محدود می کند.
بسیاری از مطالعات و برنامه های مسیریابی بر پروفیل های سرعت ثابت برای هر کلاس جاده ای که توسط پارامترهای ورودی مختلف تعریف می شود، تکیه می کنند. برای جلوگیری از پرش در این مرزهای کلاس، می توان از یک سیستم کنترل فازی (FCS) استفاده کرد. چنین FCS قادر است این پارامترهای ورودی را فازی کند و خروجی پیوسته و غیرخطی بیشتری ارائه دهد. علاوه بر این، مبتنی بر دانش تخصصی است و برای یادگیری رفتار خود به داده های مرجع متکی نیست.
این مطالعه بسط کار قبلی ما [ 18 ] است که در پنجمین کنفرانس بین المللی نظریه، کاربردها و مدیریت سیستم های اطلاعات جغرافیایی در هراکلیون، یونان منتشر شد. با تمرکز بر شبکههای جادهای روستایی، ما یک چارچوب فازی برای تخمین سرعت (Fuzzy-FSE) برای تخمین میانگین سرعت در جادههای شبکه ایجاد میکنیم. سرعت از پارامترهای ورودی چندگانه مشتق شده است: سطح سلسله مراتب جاده، سطح، شیب و طول پیوند. شبکه جاده ای OSM و داده های SRTM (ماموریت توپوگرافی رادار شاتل) به عنوان داده های ورودی برای Fuzzy-FSE خدمت می کنند. دو رویکرد متفاوت ارائه شده است: رویکرد اول تنها بر دادههای OSM متکی است. از تعداد نقاط تکیه گاه شکل برداری یک جاده به عنوان تقریبی برای شیب استفاده می کند (به بخش 3.1 مراجعه کنید.). رویکرد دوم شیب جاده را از یک مدل ارتفاعی دیجیتال SRTM محاسبه میکند. رابط برنامه نویسی برنامه Google Directions (GD-API) به عنوان داده مرجع و به عنوان ورودی برای محاسبه پایه استفاده می شود. Fuzzy-FSE شامل چندین FCS است که برای به دست آوردن یک خروجی سرعت پیوسته به کار می روند. FCSها با توابع عضویت یکسان (MF) برای پارامترهای ورودی شیب و طول پیوند و MF متفاوت برای سرعت پارامتر خروجی تنظیم میشوند. دو مطالعه موردی نمونه انجام شده است: یکی در منطقه BioBío و Maule (BM) در شیلی و دیگری در شمال نیو ساوت ولز (NNSW) در استرالیا.
آثار اصلی این مقاله به شرح زیر خلاصه می شود:
-
توسعه یک فازی-FSE چند پارامتری حاوی ترکیبی از چندین FCS.
-
تجزیه و تحلیل دقیق و بحث در مورد عملکرد فازی-FSE در مقایسه با یک روش موجود.
-
استفاده از تنها منبع باز و داده های موجود در سراسر جهان (OSM، SRTM).
-
قابلیت انتقال روش ارائه شده به مناطق دیگر؛
-
امکان استفاده از Fuzzy-FSE فقط با داده های OSM به عنوان ورودی.
-
مطالعات موردی نمونه در منطقه BioBío و Maule در شیلی و در نیو ساوت ولز در استرالیا.
-
مجموعه داده ها و اجرای Fuzzy-FSE در GitHub [ 19 ] منتشر شده است.
در این مقاله، ابتدا مروری بر کارهای مرتبط با سرعت متوسط و زمان سفر پیوند در OSM در بخش 2.1 ارائه میکنیم و مفهوم کنترل فازی را در بخش 2.2 معرفی میکنیم. فهرست مفصلی از اضافات و الحاقات در مقایسه با مطالعه قبلی ما در بخش 2.3 آورده شده است. مجموعه داده های OSM، SRTM و GD-API در بخش 3 توضیح داده شده است. سپس، فازی-FSE توسعه یافته با FCS در بخش 4 توضیح داده شده است . شرحی از هر دو مطالعه موردی ( بخش 5 )، نتایج ( بخش 6 ) و یک بحث مفصل ( بخش 7 ) ارائه شده است. در نهایت، یک نتیجه گیری و یک چشم انداز در بخش 8 ارائه شده است.
2. کارهای مرتبط
در این بخش به معرفی مختصر کار مرتبط با دو موضوع می پردازیم. بخش 2.1 و بخش 2.2 نقل قول مستقیم از کار قبلی ما هستند [ 18 ]. ابتدا، بررسی میکنیم که چگونه زمان سفر پیوند در روشهای دیگری که بر دادههای OSM متکی هستند محاسبه میشود. سپس به معرفی مفهوم کنترل فازی، مزایای آن و چگونگی اعمال این مفهوم توسط سایر مطالعات می پردازیم. در نهایت، اضافات عمده این مطالعه در مقایسه با کار قبلی ما در بخش 2.3 ارائه شده است.
2.1. پیوند زمان سفر در OSM
بسیاری از برنامه های مسیریابی وجود دارند که سریع ترین مسیرها را محاسبه می کنند و در نتیجه زمان سفر را به هم مرتبط می کنند و بر اساس داده های OSM هستند. نمونه های معروف OpenRouteService [ 20 ]، Open Source Routing Machine (OSRM) [ 21 ]، OpenTripPlanner [ 22 ] و YOURS [ 23 ] هستند. سه مورد آخر برنامه های منبع باز هستند و از اطلاعات حداکثر سرعت در OSM برای محاسبه زمان سفر پیوند در صورت وجود استفاده می کنند. اگر نه، ویکی OSM [ 24] شامل محدودیتهای سرعت پیشفرض برای برخی کشورها (24 کشور در سراسر جهان) است که توسط این برنامههای مسیریابی پردازش و اعمال میشوند. این برنامه ها همچنین شامل ویژگی های دیگری مانند نوع جاده و تعداد خطوط (در صورت وجود) برای استخراج مشخصات سرعت ثابت برای هر کلاس جاده هستند. الگوریتم OpenRouteService برای عموم قابل دسترسی نیست. با این حال، به نظر پیچیده تر از سایر برنامه های مسیریابی است زیرا اطلاعات اضافی مانند شیب و نوع مسیر را ارائه می دهد. با این حال، مانند بسیاری از برنامههای مسیریابی تجاری مانند Google Maps یا Bing Maps، محاسبه دقیق شفاف نیست.
تعداد کمی از مطالعات به این موضوع برای استخراج زمان سفر پیوندی از شبکه جاده ای OSM پرداخته اند. استانوجویچ و همکاران [ 1 ] روشی را برای محاسبه زمان سفر پیوند بر اساس اطلاعات مبدأ-مقصد و مهر زمانی تولید شده توسط ناوگان تاکسی و دادههای OSM ارائه میکند. آنها زمان سفر در مناطق شهری را با 60 درصد خطای کمتر از OSRM تخمین می زنند. بسیاری از کارهای مرتبط بر مناطق شهری و چگونگی بهبود تخمین زمان سفر در شبکههایی با ترافیک زیاد متمرکز است. استایگر و همکاران [ 25 ] شامل داده های ترافیک بلادرنگ در برنامه OpenRouteService است.
همانطور که در بخش 1 ذکر شد ، عوامل مهم برای مسیریابی در مناطق شهری و روستایی به طور قابل توجهی متفاوت است. در استانداردهای طراحی مسیرهای بزرگراه آسیایی، حداکثر سرعت تعیین شده یک جاده در یک منطقه روستایی به طور مستقیم به شیب زمین وابسته است [ 26 ]. Brabyn و Skelly [ 27 ] دسترسی به بیمارستان های دولتی را مدل می کنند و کوتاه ترین و سریع ترین مسیرها را محاسبه می کنند. برای تخمین زمان سفر لینک، آن ها اگر جاده در داخل یا خارج از یک منطقه شهری است، تعداد خطوط و سینوسی یک جاده را در نظر می گیرند. سینوسیت یک جاده با شاخص سینوسی محاسبه می شود. آنها جاده ها را بر اساس این عوامل دسته بندی می کنند و برای هر ترکیب سرعت های ثابتی را تعیین می کنند.
هدف این مطالعه پر کردن برخی از خلأهای موجود در کار مرتبط است. اکثر برنامههای مسیریابی با OSM بیشتر بر شهر تمرکز میکنند تا مناطق روستایی و فقط محدودیتهای سرعت سراسر کشور را در محاسبه زمان سفر خود لحاظ میکنند. تعداد کمی از مطالعات بر محاسبه زمان سفر لینک تمرکز دارند. آنهایی که به مجموعه داده های تجاری یا جمع آوری شده خود متکی هستند. طبق دانش ما، یک سیستم کنترل فازی هرگز برای تخمین زمان سفر پیوند با پارامترهای مختلف استفاده نشده است.
2.2. کارهای مرتبط بر روی سیستم های کنترل فازی
FCS ها بر روی اصطلاحات زبانی و عضویت های جزئی کار می کنند که قادر به بیان ابهام هستند. یک FCS مقادیر ورودی واضح را می گیرد و با کمک توابع عضویت آنها را فازی می کند. در مرحله دوم، یک قاعده مبنایی را برای مکانیسم استنتاج فراهم می کند. فازی سازی مقادیر خروجی واضح و پیوسته را تولید می کند.
ایده کنترل فازی برای اولین بار توسط [ 28 ] برای ترکیب موتور بخار و دیگ معرفی شد. از آن زمان، کنترل فازی به طور موفقیت آمیزی در زمینه های مختلف تحقیقاتی به کار گرفته شده است: در تحقیقات زیست محیطی به عنوان مثال، برای شبیه سازی سیل [ 29 ]، در سنجش از دور به عنوان مثال، برای طبقه بندی داده های چند طیفی [ 30 ]، در برنامه های GIS [ 31 ] یا در تحلیل. شیمی [ 32 ]. داس و وینتر [ 33 ] از منطق فازی برای تشخیص حالت حمل و نقل در یک محیط شهری استفاده می کنند.
Fuzzy Control اجازه می دهد تا بسیاری از پارامترهای ورودی و خروجی زیادی را داشته باشید. چنین پارامترهایی را می توان در یک قانون if-then [ 34 ] ترکیب کرد. دو نقطه قوت کنترل فازی توانایی استدلال با عدم قطعیت و استفاده از آن در فرآیندهای پیچیده نامشخص بدون دانش زیادی از دینامیک اساسی آنها است [ 35 ].
2.3. مقایسه با مطالعه قبلی ما
در مقایسه با مطالعه قبلی ما در [ 18]، ما (الف) پارامترهای ورودی بیشتر (طول جاده، سطح جاده) را برای تخمین بهتر میانگین سرعت اضافه می کنیم، (ب) یک روش جدید برای تقریبی شیب جاده با استفاده از تعداد نقاط تکیه گاه شکل برداری جاده معرفی می کنیم. و بنابراین استفاده از Fuzzy-FSE را فقط با داده های OSM و بدون داده های اضافی (به عنوان مثال SRTM) فعال کنید، (ج) ارزیابی جهانی کیفیت و کامل بودن برچسب ها (سطح، خطوط، عرض، روشن) در جاده OSM انجام دهید. داده ها، (د) محاسبه یک خط مبنا با پروفیل های سرعت ثابت برای مقایسه نتایج، (ه) توسعه یک فازی-FSE چند پارامتری جدید با پایه قانون تابع عضویت اضافی و پایگاه دانش که تصمیم می گیرد کدام سیستم کنترل فازی اعمال شود، (f) توابع عضویت چندگانه را برای سرعت برای FCSهای مختلف فازی-FSE معرفی کنید،(ز) ایجاد توابع مختلف عضویت برای پارامترهای شیب، نقاط پشتیبانی در هر کیلومتر و طول پیوند، (ح) تجزیه و تحلیل اطلاعات موجود در OSM در شبکه جاده های موجود برای هر دو منطقه مورد مطالعه، (1) انجام مطالعات موردی اضافی با داده های جدید در منطقه Maule در شیلی و در نیو ساوت ولز در استرالیا، (j) یک ارزیابی دقیق و بحث در مورد نتایج با مقایسه آنها با خط پایه و تجزیه و تحلیل همه احتمالات ارائه شده توسط Fuzzy-FSE، (k) تمرکز بر روی میانگین سرعت خروجی ارائه می کند. به جای زمان سفر در ارزیابی، زیرا قابل مقایسه تر است، (ل) با مقایسه عملکرد فازی-FSE در هر دو منطقه مورد مطالعه و با حالت های مختلف به نتایج جدیدی می رسد، (م) اجرای فازی-FSE را در GitHub منتشر می کند. .(ح) تجزیه و تحلیل اطلاعات موجود در OSM در شبکه جاده های موجود برای هر دو منطقه مورد مطالعه، (1) انجام مطالعات موردی اضافی با داده های جدید در منطقه Maule در شیلی و در New South Wales در استرالیا، (j) ارائه یک ارزیابی دقیق و بحث در مورد نتایج با مقایسه آنها با خط مبنا و تجزیه و تحلیل همه احتمالاتی که Fuzzy-FSE فراهم می کند، (k) تمرکز بر میانگین سرعت خروجی به جای زمان سفر در ارزیابی، زیرا قابل مقایسه تر است، (l) به نتایج جدیدی برسیم. با مقایسه عملکرد Fuzzy-FSE در هر دو منطقه مورد مطالعه و با حالت های مختلف، (m) اجرای فازی-FSE را در GitHub منتشر کنید.(ح) تجزیه و تحلیل اطلاعات موجود در OSM در شبکه جاده های موجود برای هر دو منطقه مورد مطالعه، (1) انجام مطالعات موردی اضافی با داده های جدید در منطقه Maule در شیلی و در New South Wales در استرالیا، (j) ارائه یک ارزیابی دقیق و بحث در مورد نتایج با مقایسه آنها با خط مبنا و تجزیه و تحلیل همه احتمالاتی که Fuzzy-FSE فراهم می کند، (k) تمرکز بر میانگین سرعت خروجی به جای زمان سفر در ارزیابی، زیرا قابل مقایسه تر است، (l) به نتایج جدیدی برسیم. با مقایسه عملکرد Fuzzy-FSE در هر دو منطقه مورد مطالعه و با حالت های مختلف، (m) اجرای فازی-FSE را در GitHub منتشر کنید.(i) انجام مطالعات موردی اضافی با داده های جدید در منطقه Maule در شیلی و در نیو ساوت ولز در استرالیا، (j) ارائه ارزیابی دقیق و بحث درباره نتایج با مقایسه آنها با خط پایه و تجزیه و تحلیل همه احتمالات Fuzzy-FSE فراهم می کند، (k) تمرکز بر میانگین سرعت خروجی به جای زمان سفر در ارزیابی، زیرا قابل مقایسه تر است، (ل) با مقایسه عملکرد فازی-FSE در هر دو منطقه مورد مطالعه و با حالت های مختلف، به نتایج جدیدی می رسد، (m) ) اجرای Fuzzy-FSE را در GitHub منتشر کنید.(i) انجام مطالعات موردی اضافی با داده های جدید در منطقه Maule در شیلی و در نیو ساوت ولز در استرالیا، (j) ارائه ارزیابی دقیق و بحث درباره نتایج با مقایسه آنها با خط پایه و تجزیه و تحلیل همه احتمالات Fuzzy-FSE فراهم می کند، (k) تمرکز بر میانگین سرعت خروجی به جای زمان سفر در ارزیابی، زیرا قابل مقایسه تر است، (ل) با مقایسه عملکرد فازی-FSE در هر دو منطقه مورد مطالعه و با حالت های مختلف، به نتایج جدیدی می رسد، (m) ) اجرای Fuzzy-FSE را در GitHub منتشر کنید.(ل) با مقایسه عملکرد Fuzzy-FSE در هر دو منطقه مورد مطالعه و با حالت های مختلف، به نتایج جدیدی دست یابیم، (m) اجرای فازی-FSE را در GitHub منتشر کنید.(ل) با مقایسه عملکرد Fuzzy-FSE در هر دو منطقه مورد مطالعه و با حالت های مختلف، به نتایج جدیدی دست یابیم، (m) اجرای فازی-FSE را در GitHub منتشر کنید.
3. مجموعه داده ها
دو مجموعه داده OSM و SRTM به عنوان ورودی برای Fuzzy-FSE خدمت می کنند. مجموعه داده OSM پارامترهای کلاس جاده، سطح جاده، طول پیوند و نقاط پشتیبانی در هر کیلومتر را ارائه می دهد. شیب جاده از داده های SRTM محاسبه می شود. داده های GD-API به عنوان داده های مرجع اعمال می شود و به عنوان ورودی برای مشخصات سرعت استفاده می شود. در این بخش مجموعه داده ها و پارامترهای مختلف توضیح داده شده است.
3.1. داده های OSM
داده های جاده OpenStreetMap شامل یک طبقه بندی سلسله مراتبی از شبکه جاده است که در جدول 1 توضیح داده شده است. این کلاسهای جادهای و جادههای پیوندی مربوط به آنها ( پیوند_بزرگراه، پیوند_تنه، پیوند_اصلی، پیوند_ثانویه، پیوند_ثالثی ) شبکه راه را تشکیل میدهند. سایر کلاسهای راه موجود، مانند جادههای مسکونی و خدماتی یا انواع جادههای خاص مانند خیابانهای زندگی، در این مطالعه در نظر گرفته نمیشوند.
تجزیه و تحلیل ویژگی های موجود جاده ها در OSM انجام شده است. پارامترهای سطح جاده (سطح برچسب OSM ) ، تعداد خطوط (خطهای برچسب OSM ) ، عرض جاده (عرض برچسب OSM ) و روشنایی ( روشن برچسب OSM ) تجزیه و تحلیل میشوند زیرا ممکن است عواملی بر زمان سفر پیوند در شبکههای جادهای روستایی باشند. سطح جاده برجسته ترین پارامتر از همه پارامترها است: 40٪ از طول کل جاده ها دارای اطلاعات سطح هستند. توزیع سطح برچسب در هر کشور در شکل 2 نشان داده شده است . اطلاعات در مورد تعداد خطوط در 15٪ وجود دارد، روشنایی در 2.22.2درصد و عرض جاده در 0.70.7درصد از طول کل جاده ها.
ما فقط متداول ترین سطح برچسب را به عنوان پارامتر ورودی در Fuzzy-FSE خود وارد می کنیم. این شامل مقادیر مختلف است: اطلاعات کلی مانند سنگفرش یا سنگفرش نشده ، و توصیف دقیق سطح (به عنوان مثال، آسفالت ، بتن ، شن ). بیشتر جاده ها فقط دارای اطلاعات عمومی هستند. تعداد کمی توصیف سطح دقیق دارند. برای این مطالعه، مقادیر سطح بر اساس دو گروه اصلی طبقهبندی میشوند: سنگفرش و بدون سنگفرش [ 24 ].
طول پیوند به عنوان یک پارامتر ورودی اضافی برای Fuzzy-FSE عمل می کند. شبکه راه ها به صورت یک نمودار با گره ها و پیوندها نشان داده می شود. همه پیوندها دارای یک گره شروع و یک گره پایانی هستند، اما هیچ گرهی در بین آنها وجود ندارد. در این نمودار، هر تقاطع و هر تغییر پارامتر در شبکه راه ها نشان دهنده یک گره است. بنابراین، پیوندها در یک شبکه پراکنده طولانی تر از یک شبکه متراکم با تقاطع های زیاد هستند. اگر در یک جاده تقاطع های زیادی وجود داشته باشد و در نتیجه پیوندهای کوتاه تری در نمودار وجود داشته باشد، سرعت متوسط کاهش می یابد.
تعداد نقاط پشتیبانی در هر کیلومتر به عنوان تقریبی برای شیب استفاده می شود زیرا می توان آن را از شکل جاده در OSM محاسبه کرد. هر چه یک جاده منحنیتر باشد، نقاط تکیهگاه بیشتری برای شکلگیری جاده مورد نیاز است و میانگین سرعت بیشتر کاهش مییابد. در OSM، توزیع نقاط پشتیبانی در هر بخش جاده یکنواخت نیست. برخی از نقشهبرداران منحنیهایی با نقاط پشتیبانی بیشتر ایجاد میکنند و سایر نقشهبرداران منحنیهای مشابه را با نقاط پشتیبانی بسیار کمتر مدلسازی میکنند. در مطالعه ما، برای به دست آوردن تعداد یکنواخت نقاط پشتیبانی، داده های برداری جاده با استفاده از الگوریتم داگلاس-پوکر [ 36 ] ساده شده است.] با تحمل یک متر. این الگوریتم برای سادهسازی تعداد نقاط پشتیبانی شبکه جادهای بدون تأثیر بر دقت شبکه در این مطالعه استفاده شده است. توجه داشته باشید که دقت کلی شبکه جاده ای OSM بدتر از یک متر است. در نهایت تعداد نقاط پشتیبانی در هر کیلومتر محاسبه می شود.
3.2. داده های SRTM
ماموریت توپوگرافی رادار شاتل یک ماموریت مشترک توسط آژانس تصویربرداری و نقشه برداری ملی و سازمان ملی هوانوردی و فضایی (ناسا) برای جمع آوری مجموعه داده های جهانی ارتفاع منبع باز بود. ما از دادههای سراسری پر شده با فضای خالی SRTM، 1 ثانیه قوس [ 37 ] با وضوح تقریبی 30 استفاده میکنیم.مترm.
با توجه به این وضوح، باید در نظر گرفت که یک پیکسل از شطرنجی SRTM ممکن است میانگین خود جاده و همچنین تپه های احتمالی در کنار آن جاده باشد. بنابراین، ما شیب زمین اطراف را در نظر می گیریم که در بیشتر موارد، بیشتر از شیب واقعی جاده است. با در نظر گرفتن این موضوع، در ادامه به نتایج به عنوان شیب جاده اشاره می کنیم.
برای محاسبه شیب جاده، با استفاده از الگوریتم هورن [ 38 ]، یک شطرنجی درصد شیب از DEM اصلی ایجاد می شود. سپس، شبکه جاده OSM با شطرنجی شیب پوشانده می شود. هر بخش جاده چندین پیکسل از شطرنجی شیب را قطع می کند. میانگین تمام پیکسل های متقاطع به عنوان مقدار شیب جاده به بخش جاده اختصاص داده می شود. در [ 18 ]، رویکرد دومی را برای محاسبه شیب جاده معرفی کردیم. با این حال، نتایج در [ 18 ] نشان می دهد که روشی که در بالا توضیح داده شد بهتر با مشکل مطابقت دارد و به همین دلیل است که ما رویکرد دیگر را در این مطالعه رد می کنیم.
3.3. Google Directions API Data
Google Directions API (GD-API) سرویسی است که جهتهای مسیریابی و زمان سفر بین مکانها را محاسبه میکند. داده های GD-API شامل مسافت بر حسب متر، زمان سفر بر حسب ثانیه در یک زمان معین و مختصات نقاط یک جاده نزدیک به مختصات نقطه ورودی است. مقادیر سرعت با استفاده از زمان سفر و خروجی مسافت محاسبه می شود.
GD-API به نقشه های گوگل و داده های جاده و ترافیک زیربنایی آن متکی است. ارزیابی کیفیت دادههای Google Maps بهویژه در کشورهای در حال توسعه دشوار است. در طول مطالعات ما، هر دو جاده ای که در OSM وجود دارد و در نقشه گوگل وجود ندارد و بالعکس شناسایی شده است. در [ 7]، دقت نقشه های بینگ، داده های OSM و داده های نقشه های گوگل در ایرلند مقایسه شده و نتایج مشاهدات ما را پشتیبانی می کند. نویسندگان دریافتهاند که اگرچه برخی از مناطق توسط یک منبع داده بهتر از سایرین ارائه میشوند، هیچ منبع دادهای به تنهایی پوشش کلی بهتری را نشان نمیدهد. در مورد دادههای سرعت و ترافیک، هیچ دادهای برای ارزیابی کیفیت Google Maps وجود ندارد. ما از مقادیر سرعت GD-API به عنوان دادههای مرجع استفاده میکنیم، در حالی که در نظر داریم که ممکن است در برخی موارد نادرست باشد.
بنابراین، هنگام مقایسه خروجی Fuzzy-FSE با خروجی GD-API، موانعی ایجاد می شود. هم دادههای Google و هم دادههای OSM ممکن است حاوی خطا باشند. از آنجایی که GD-API همیشه کوتاهترین مسیر را طی میکند، ممکن است مسیر متفاوتی بین دو مختصات ورودی نسبت به جادهای که میخواهیم سرعت را از آن مقایسه کنیم، طی کند. علاوه بر این، خروجی زمان سفر GD-API ثانیه های کامل است. بنابراین، سرعت محاسبهشده بخشهای کوتاه جاده با زمان سفر تنها چند ثانیه ممکن است به دلیل گرد کردن دقت کمتری داشته باشد. یک خروجی نمونه از GD-API 4 سsبرای 100 مترmبخش جاده می تواند نشان دهنده سرعت در هر حالت = نماد 81 باشد کk مترm/ ساعتh(برای 4.44.4 سs) یا per-mode=symbol 102 کk مترm/ ساعتh(برای 3.53.5 سs).
برای این مطالعه، چهار نوع خطای احتمالی یا عدم دقت بزرگ به طور خودکار ثبت میشوند و از مقایسه حذف میشوند:
-
فاصله بین نقاط شروع یا پایان جاده در OSM و Google بیشتر از 50 است مترm;
-
طول جاده در OSM و Google بیش از 20٪ متفاوت است.
-
جاده کوتاهتر از 200 است مترm;
-
درخواست به GD-API یک خطا یا مجموعه نتایج خالی را برمیگرداند.
برای ارزیابی عملکرد Fuzzy-FSE، آن را با مشخصات سرعت ثابت مقایسه می کنیم. مشخصات سرعت مقادیر متفاوتی از سرعت را برای هر کلاس جاده اختصاص می دهد. در یک کلاس جاده، همه جادهها مقدار سرعت یکسانی دارند. برای این مطالعه، مشخصات سرعت از میانگین سرعت GD-API برای هر کلاس جاده استخراج شده است.
4. روش ها
این بخش معماری Fuzzy-FSE را ارائه می دهد ( شکل 3 را ببینید ). از دو بخش تشکیل شده است: بخش اول پایه قانون تابع عضویت (MF) با پایگاه دانش است که MF های مختلفی را برای سرعت تشکیل می دهد. از این، چندین FCS ساخته می شود که سرعت را از پارامترهای ورودی شیب جاده و طول پیوند محاسبه می کند. یک FCS برای هر سرعت MF بسته به کلاس جاده و سطح ساخته شده است.
شیب جاده و طول پیوند به عنوان پارامترهای ورودی برای FCS ها برای محاسبه سرعت متوسط عمل می کنند. همانطور که در بخش 3.1 ذکر شد ، پارامتر شیب جاده را می توان از داده های SRTM محاسبه کرد یا با استفاده از تعداد نقاط پشتیبانی در هر کیلومتر از جاده تقریبی کرد. در این مطالعه هر دو اجرا می شوند.
منطق فازی ایده عضویت جزئی را معرفی می کند. در یک مجموعه واضح، اعضا فقط در صورتی عضو می شوند که عضویت آنها کامل باشد. با این حال، در مجموعه های فازی، عناصر درجات مختلفی از عضویت دارند [ 35 ]. در طول فازی سازی، MF مقادیر ورودی و خروجی واضح را به مجموعه های فازی تبدیل می کند ( شکل 3 ، مرحله 1). MF که در بازه 0 (نه عضو) تا 1 (عضو کامل) تعریف می شوند، عضویت پارامترهای شیب، طول پیوند و سرعت را مشخص می کنند. انواع مختلفی از MFها از جمله MFهای مثلثی، ذوزنقه ای، سیگموئیدی، گاوسی و زنگی شکل وجود دارد [ 35 ]. ما MFهای مثلثی را برای شیب و طول پیوند تعریف می کنیم که در شکل 4 نشان داده شده است.
اصطلاحات زبانی برای شیب شامل سطح، نورد، کوهستانی و شیب دار است. اصطلاحات زبانی برای طول پیوند از خیلی کوتاه تا خیلی طولانی متغیر است. سرعت پارامتر خروجی بین آهسته، متوسط و سریع متفاوت است. در پیشمطالعات، تأثیر اشکال مختلف MFs بر نتایج را تحلیل کردهایم. سپس، ما آن را با دانش تخصصی از ادبیات [ 26 ، 39 ] ترکیب می کنیم تا MFs ارائه شده را به دست آوریم. هر FCS از MF یکسان برای طول و شیب پیوند استفاده می کند اما از MF متفاوت برای سرعت استفاده می کند.
با توجه به پایه قانون MF، سرعت MF های مختلف تعریف شده است. بسته به پارامترهای ورودی کلاس جاده و سطح جاده، 10 سرعت MF مختلف طراحی شده است:
-
سرعت MF 1: کلاس = بزرگراه ،
-
سرعت MF 2: کلاس = صندوق عقب ،
-
سرعت MF 3: کلاس = اولیه و سطحی = سنگفرش ،
-
سرعت MF 4: کلاس = اولیه و سطحی = سنگفرش نشده ،
-
سرعت MF 5: کلاس = ثانویه و سطح = سنگفرش ،
-
سرعت MF 6: کلاس = ثانویه و سطح = سنگفرش نشده ،
-
سرعت MF 7: کلاس = سوم و سطح = سنگفرش ،
-
سرعت MF 8: کلاس = سوم و سطح = سنگفرش نشده ،
-
سرعت MF 9: کلاس = طبقه بندی نشده و سطح = سنگ فرش ،
-
سرعت MF 10: کلاس = طبقه بندی نشده و سطح = بدون سنگفرش .
برای کلاس های بزرگراه و تنه ، یک سطح آسفالت شده در نظر گرفته شده است. در مناطق دیگر، حتی ممکن است سرعت MF کمتری لازم باشد زیرا جادههای آسفالت کمتری وجود دارد. سرعت ده MFs با استفاده از دانش تخصصی خاص منطقه در مورد توزیع سرعت در کلاس جاده و سطح طراحی شده است. برای جادههای بدون اطلاعات سطح، سطح برای کلاسهای جاده اولیه و ثانویه آسفالتشده و برای کلاسهای جاده سوم و طبقهبندی نشده آسفالتشده فرض میشود . سرعت MFهای خاص بسته به منطقه مورد مطالعه تولید می شود (به بخش 5 مراجعه کنید ).
ما از یک سیستم استنتاج فازی ممدانی [ 28 ] استفاده می کنیم که دارای یک پایه قاعده است که در آن هر قاعده دارای یک قسمت مقدم (IF) و یک قسمت بعدی (THEN) است ( شکل 3 ، مرحله 2). سوابق و پیامدها را می توان با استفاده از یک عملگر AND جمع کرد. 20 قانون با دو مقدمه (شیب و طول پیوند) و هر کدام یک نتیجه (سرعت) ایجاد شده است. دو قانون نمونه عبارتند از:
-
اگر شیب یک سطح باشد و طول پیوند بسیار طولانی باشد، سرعت سریع است.
-
اگر شیب چرخان است و طول پیوند بسیار کوتاه است، سرعت متوسط و آهسته است.
ما تمام قوانین اعمال شده را در قالب یک نوت بوک پایتون از طریق GitHub [ 19 ] ارائه می کنیم.
آخرین مرحله هر FCS، فازیزدایی است ( شکل 3 ، مرحله 4) که خروجی فازی را به خروجی واضح تبدیل میکند. در مطالعه خود، روشهای مختلف فازیسازی مانند مرکز، نیمساز و میانگین، حداقل و حداکثر حداکثر را آزمایش کردیم. فاززدایی مبتنی بر مرکز (نگاه کنید به [ 35 ]) بهترین برآورد ما را دارد، زیرا منجر به توزیع پیوسته می شود.
توجه داشته باشید که MFها برای طول و شیب و همچنین پایه قانون MF و پایه قاعده FCSها برای هر منطقه مورد مطالعه یکسان باقی می مانند. فقط ده سرعت MF مختلف در هر کلاس جاده و سطح جاده باید با دانش تخصصی برای مناطق مختلف تطبیق داده شود.
5. مناطق مطالعه موردی
فازی-FSE به عنوان مثال برای مناطق BioBío و Maule (BM) در مرکز شیلی و برای بخشی از شمال نیو ساوت ولز (NNSW) در استرالیا اعمال می شود. در نیو ساوت ولز، منطقه مورد مطالعه شامل بخش های آماری Mid-North Coast، Richmond-Tweed و Northern است. مناطق مورد مطالعه در شیلی و استرالیا از نظر اندازه قابل مقایسه هستند اما در مراحل مختلف توسعه هستند.
در شیلی، زیرساخت های جاده ای نمونه ای از یک کشور در حال توسعه است. حتی در مناطق پرجمعیت، جادههای آسفالتنشده زیادی وجود دارد و جادههای آسفالته اغلب حفظ نمیشوند، بنابراین میانگین سرعت در مقایسه با کلاسهای جادهای مشابه در کشورهای پیشرفتهتر پایین است. استرالیا کشوری توسعه یافته با زیرساخت های جاده ای به خوبی نگهداری شده است. جادههای سطح بالا در بخشهای پرجمعیتتر در NNSW نسبت به بخشهای مشابه در مناطق BM وجود دارد. این همچنین منجر به میانگین سرعت بالاتر در تمام کلاس های جاده می شود که در شکل 5 قابل مشاهده است. علاوه بر این، مجموعه داده OSM برای NNSW کامل تر است و حاوی اطلاعات اضافی بیشتری نسبت به مجموعه داده OSM برای مناطق BM است. تگ maxspeed برای پر شده است 22.522.5% از کل کیلومترهای جاده در NNSW اما فقط برای 7.27.2% از کل کیلومترهای جاده در مناطق BM.
مناطق BM دارای یک توپوگرافی مشخص با رشته کوه های ساحلی در غرب و رشته کوه های آند در شرق هستند. این منجر به خشم گسترده ای از شیب های جاده در مجموعه داده شیلی می شود. استرالیا کمتر کوهستانی است و جاده های کمتری با شیب زیاد جاده دارد. هر دو منطقه مورد مطالعه دارای مناطق روستایی بزرگی هستند که پرجمعیت نیستند. هر دو منطقه مورد مطالعه دارای جادههای آسفالتنشدهتر از جادههای آسفالتشده (نگاه کنید به جدول 2 ) و جادههای سطح پایینتر از جادههای سطح بالا هستند. ترکیبی از همه ویژگی های ذکر شده، هر دو منطقه را کاندیدای ایده آل برای اعمال فازی-FSE توسعه یافته می کند. قابلیت انتقال روش به مناطق مختلف روستایی با استفاده از Fuzzy-FSE به این دو منطقه که در بسیاری از جنبههای ذکر شده در بالا متفاوت هستند نشان داده میشود.
جدول 2 یک نمای کلی از داده های OSM برای هر دو منطقه مورد مطالعه ارائه می دهد. بزرگترین کلاس جاده در شیلی ترشیاری است که بیش از 50 درصد از شبکه جاده ها را تشکیل می دهد. در استرالیا، اکثر جاده ها در کلاس طبقه بندی نشده قرار دارند. یکی دیگر از تفاوت های قابل توجه ترانک کلاس جاده است که تقریباً در شیلی وجود ندارد اما در استرالیا زیاد استفاده می شود. در هر دو کشور، بیشتر جاده ها دارای اطلاعات سطحی هستند. اطلاعات سطح به دو دسته اصلی سنگفرش و بدون سنگفرش طبقه بندی می شود زیرا اطلاعات سطحی با جزئیات بیشتر نادر است. برچسب های سنگفرش ، سنگفرش نشده و آسفالت را تشکیل می دهند 97.697.6% (BM) و 82.182.1% (NNSW) اطلاعات سطح. با این حال، تعداد کمی از جاده ها در استرالیا و تعداد بسیار کمی از جاده ها در شیلی دارای اطلاعات سرعت هستند که بر نیاز به محاسبه سرعت تاکید می کند. تجزیه و تحلیل فضایی نشان می دهد که بسیاری از جاده هایی که دارای اطلاعات سرعت هستند یا بزرگراه هستند یا در مناطق شهری در هر دو منطقه مورد مطالعه قرار دارند. در [ 18 ]، نشان میدهیم که حذف جادههای کوتاهتر از 200 معتبر است مترmاز اعتبار سنجی
شکل 5 توزیع داده های سرعت GD-API را در هر دو منطقه مورد مطالعه و برای کلاس های مختلف جاده نشان می دهد. میانگین سرعت در هر کلاس از GD-API برای مقایسه با تخمین Fuzzy-FSE محاسبه می شود. در مجموعه داده های GD-API برای مناطق BM، میانگین سرعت عبارتند از: 94 کیلومتر در ساعتh( بزرگراه )، 58 کیلومتر/ ساعتh( صندوق عقب ) 61 کیلومتر/ ساعتساعت( اصلی )، 45 کیلومتر/ ساعتساعت( ثانویه )، 34 کیلومتر/ ساعتساعت( سوم ) و 26 کیلومتر / ساعتساعت( غیر طبقه بندی شده). در مجموعه داده NNSW میانگین سرعت عبارتند از: 99 کیلومتر در ساعتساعت( بزرگراه )، 80 کیلومتر/ ساعتساعت( صندوق عقب ) 76 کیلومتر/ ساعتساعت( اصلی )، 68 کیلومتر/ ساعتساعت( ثانویه )، 56 کیلومتر/ ساعتساعت( سوم ) و 38 کیلومتر / ساعتساعت( غیر طبقه بندی شده).
همانطور که در بخش 4 توضیح داده شد ، ده MF برای سرعت برای هر منطقه مورد مطالعه تعریف شده است. سرعت MF به صورت دستی با استفاده از دانش تخصصی در مورد شرایط جاده مناطق و توزیع سرعت تعریف می شود. در این مورد، دانش تخصصی از توزیع داده های سرعت GD-API گرفته شده است. دو سرعت MF نمونه، یکی برای منطقه BM و دیگری برای NNSW، برای کلاس سوم و برای یک سطح آسفالت نشده در شکل 6 نشان داده شده است. تعریف تمام سرعت های MF برای هر دو منطقه مورد مطالعه از طریق GitHub [ 19 ] ارائه شده است.
از 17809 (BM)/21977 (NNSW) جاده های در نظر گرفته شده برای ارزیابی، تقریباً 12٪ (BM)/4٪ (NNSW) به دلیل خطاهای شرح داده شده در بخش 3.3 حذف شده اند. خطاها زمانی رخ می دهند که فاصله جاده بین OSM و داده های GD-API در بیش از 20٪ (50٪ (BM) / 28٪ (NNSW) از خطاها) و زمانی که نقطه شروع یا پایان در بیش از 50 متفاوت باشد، رخ می دهد. مترمتر(46% (BM)/69% (NNSW) از خطاها). در 60 مورد (BM)/20 (NNSW) GD-API با خطا پاسخ می دهد.
6. نتایج
ما فازی-FSE را در هر دو منطقه مورد مطالعه در دو حالت اعمال میکنیم: یک بار فقط با دادههای OSM، با استفاده از نقاط پشتیبانی در هر کیلومتر به عنوان تقریبی برای شیب جاده. حالت دیگر درصد شیب جاده را با داده های SRTM محاسبه می کند و از OSM برای بقیه پارامترهای ورودی استفاده می کند. هر دو برنامه یک بار با همه جاده ها و یک بار فقط با داشتن اطلاعات سطح جاده ها آزمایش می شوند. همانطور که در بخش 4 توضیح داده شد ، وقتی همه جادهها گنجانده میشوند، جادههایی که اطلاعات سطحی ندارند، بسته به کلاس جاده یک سطح پیشفرض اختصاص مییابد. علاوه بر این، تأثیر طول پیوند بر نتایج با آزمایش تأثیر شامل کردن تمام جادههای طولانیتر از 200 مورد تجزیه و تحلیل قرار میگیرد. مترمتر، سپس تمام جاده های طولانی تر از 400 مترمترو در نهایت تمام جاده های طولانی تر از 600 مترمتر. یک پروفیل سرعت ثابت که از میانگین سرعت برای هر کلاس از دادههای سرعت GD-API تشکیل شده است، به عنوان خط پایه محاسبه میشود.
جدول 3 نتایج را برای مناطق BM برای همه حالت های آزمایش شده نشان می دهد. هر دو کاربرد Fuzzy-FSE بهتر از خط پایه عمل می کنند. عملکرد با طول پیوندها افزایش می یابد. نتایج فازی-FSE برای مناطق BM زمانی که همه جادهها گنجانده شوند، به جای جادههای دارای اطلاعات سطح، بسیار بهتر است. عملکرد Fuzzy-FSE با ورودی داده های OSM و SRTM تقریباً با Fuzzy-FSE تنها با استفاده از داده های OSM برابر است. بهترین نتیجه برای مناطق BM (R 2 : 75.6675.66درصد خطای ریشه میانگین مربع (RMSE): per-mode=symbol 11.0811.08 کک مترمتر/ ساعتساعت) با در نظر گرفتن داده های OSM و SRTM به عنوان ورودی و تنها در نظر گرفتن تمام جاده های طولانی تر از 600 به دست می آید. مترمتر.
نتایج برای NNSW در استرالیا در جدول 4 ارائه شده است. Fuzzy-FSE به طور قابل توجهی بهتر از خط پایه با R2 که بین 6 ٪ تا 12٪ بالاتر از خط پایه است، بهتر عمل می کند. مشابه نتایج مناطق BM، عملکرد هر دو حالت فازی-FSE تقریباً یکسان است. بر خلاف مناطق BM، نتایج بهتر است اگر تنها جاده های با اطلاعات سطح در نظر گرفته شود. استفاده از داده های OSM و SRTM به عنوان ورودی و تنها ارزیابی پیوندها با اطلاعات سطح و بیش از 600 مترمترطول منجر به بهترین نتیجه با R 2 از می شود 70.5770.57% و یک RMSE از per-mode=symbol 13.6113.61 کک مترمتر/ ساعتساعت.
شکل 7 توزیع تفاوت بین سرعت محاسبه شده و سرعت مرجع در هر کلاس جاده را برای هر دو منطقه مورد مطالعه نشان می دهد. مقادیر سرعت شامل تمام پیوندهای طولانی تر از 200 می شود مترمترو با هر دو OSM و SRTM به عنوان داده های ورودی محاسبه می شوند. در NNSW، تفاوت بین سرعت محاسبه شده و مرجع به طور کلی بیشتر از مناطق BM است. در مناطق BM، کلاس های بزرگراه ، سوم و طبقه بندی نشده بهترین عملکرد را دارند. کلاس های بزرگراه و طبقه بندی نشده بهترین نتایج را در NNSW دارند.
نقشه انحراف سرعت با تمام جاده های بیش از 200 مترمترو داده های OSM و SRTM به عنوان ورودی در شکل 8 نشان داده شده است . به طور کلی، توزیع جغرافیایی انحراف سرعت در هر دو منطقه مورد مطالعه سازگار است. با این حال، در غرب منطقه مورد مطالعه در استرالیا، برخی از جاده ها وجود دارد که هم به طور قابل توجهی کمتر و هم بیش از حد برآورد شده است. در مراکز شهری، Fuzzy-FSE بیشتر مقادیر سرعت بالاتری را نسبت به GD-API محاسبه می کند.
7. بحث
Fuzzy-FSE توسعه یافته ما برای هر دو منطقه مطالعه در حالت های مختلف اعمال می شود. این امکان تجزیه و تحلیل دقیق نتایج مختلف را فراهم می کند. در این بخش، نتایج نشان داده شده در بخش 6 را مورد بحث و تفسیر قرار می دهیم . ما بر عملکرد فازی-FSE به جای تجزیه و تحلیل دقیق منطقه ای تمرکز می کنیم. در بحث، ما بر عملکرد: فازی-FSE در مقابل خط پایه، شامل تنها دادههای OSM در مقابل افزودن دادههای SRTM، تجزیه و تحلیل تمام جادهها یا فقط جادههایی که اطلاعات سطحی دارند و ارزیابی طولهای مختلف پیوند تمرکز میکنیم.
خط مبنا محاسبه شده نشان دهنده وضعیت فعلی هنر است. همانطور که در بخش 2 توضیح داده شد ، اکثر برنامه های مسیریابی از مقادیر سرعت ثابت در هر کلاس جاده برای محاسبه زمان سفر عامل هزینه استفاده می کنند. خط پایه که ما محاسبه میکنیم به احتمال زیاد بیشتر از سایر پروفایلهای سرعت با ویژگیهای مناطق سازگار است، زیرا از میانگین سرعت GD-API استفاده میکند، که اطلاعاتی است که اکثر موتورهای مسیریابی فاقد آن هستند. در مقایسه با خط پایه، فازی-FSE توسعه یافته برای هر دو منطقه مطالعه بهتر عمل می کند. برای NNSW، بهبود بسیار مهمتر از مناطق BM است. این ممکن است ناشی از تفاوت در مجموعه داده ها باشد. با توجه به محدوده داده های سرعت GD-API ( شکل 5 را ببینید، محدوده سرعت در NNSW به طور قابل توجهی بزرگتر از مناطق BM است. هرچه دامنه مقادیر سرعت کمتر باشد، بهتر می توان آن را با یک مقدار سرعت متوسط تقریب زد. در NNSW، محدوده سرعت بزرگ را می توان به طور قابل توجهی با Fuzzy-FSE بهتر از خط پایه تخمین زد، زیرا قادر به ارائه یک محدوده مداوم از مقادیر سرعت است. از سوی دیگر، عملکرد کلی کلیه برآوردهای ارائه شده در این مطالعه در مناطق BM بهتر است. این همچنین به دلیل محدوده سرعت زیاد در NNSW ایجاد می شود زیرا حتی Fuzzy-FSE نمی تواند کل محدوده سرعت را پوشش دهد.
ما دو حالت را برای محاسبه سرعت که در داده های ورودی برای شیب جاده متفاوت است، تجزیه و تحلیل می کنیم. حالت اول فقط از داده های OSM استفاده می کند، در حالی که حالت دوم داده های SRTM را اضافه می کند. اگرچه R 2 برای هر دو حالت کم و بیش برابر است، اما زمانی که داده های SRTM گنجانده شود، RMSE کوچکتر است. شیب جاده که با محاسبه نقاط تکیه گاه در هر کیلومتر تقریبی می شود، دقت کمتری دارد، زیرا جاده انحنادار همیشه به معنای شیب بالاتر نیست. علاوه بر این، اشکال برداری در OSM ممکن است اغلب مستقیمتر از جاده واقعی باشند، زیرا مشارکتکنندگان به طور نادقیق نقشهبرداری میکنند. با این حال، نتایج نشان میدهد که تخمینهای سرعت دقیق را میتوان توسط Fuzzy-FSE تنها با استفاده از دادههای OSM بدون منبع داده اضافی محاسبه کرد.
اثر اطلاعات سطح جاده در OSM نیز تحلیل میشود. ما عملکرد فازی-FSE را با تمام جادهها با نتایجی که فقط شامل جادههایی میشوند که اطلاعات سطح را در OSM نشان میدهند، مقایسه میکنیم. نتایج در هر دو منطقه مورد مطالعه مخالف است. انتظار اولیه این بود که شامل تنها جاده هایی با اطلاعات سطحی بهتر از در نظر گرفتن همه جاده ها باشد. این انتظار در NNSW تایید شده است. با این حال، در مناطق BM، در نظر گرفتن همه جادهها و در نتیجه شامل مقادیر سطح پیشفرض در هر کلاس جاده (به بخش 4 مراجعه کنید.) باعث عملکرد بهتر فازی-FSE می شود. ما فرض میکنیم که این ممکن است ناشی از کیفیت بد احتمالی دادههای سطح جاده در مناطق BM باشد. با در نظر گرفتن منطقه مورد مطالعه NNSW، Fuzzy-FSE بدون اطلاعات سطح بدتر عمل می کند اما هنوز حداقل 6٪ بهتر از خط پایه است.
علاوه بر این، ما تأثیر طول پیوند را بر عملکرد فازی-FSE ارزیابی میکنیم. مقادیر سرعت به دست آمده برای لینک های کوتاه تر از لینک های طولانی تر دقیق تر است. بخش بزرگی از این به دلیل ناامنی داده های سرعت GD-API است که در بخش 3.3 توضیح داده شده است. علاوه بر این، یک مقدار سرعت کاذب برای جادههای کوتاهتر از جادههای طولانیتر تأثیر کمتری دارد، زیرا بعداً در مسافت برای بدست آوردن زمان سفر ضرب میشود. بنابراین، در نظر گرفتن جاده های طولانی تر برای ارزیابی فازی-FSE معتبر است.
فازی-FSE برخی از کلاس های جاده را بهتر از سایرین تخمین می زند. با مقایسه محدوده مقادیر سرعت در هر کلاس جاده ( شکل 5 ) با تفاوت بین سرعت های محاسبه شده و سرعت های مرجع ( شکل 7 )، یک همبستگی مشاهده می شود. هرچه دامنه مقادیر سرعت بیشتر باشد، توزیع اختلاف سرعت بیشتر است. با در نظر گرفتن دنیای واقعی، یک بزرگراه دارای سرعت عمدتاً همگن، معمولاً حداقل دو خط و تغییر شیب کمی است. با این حال، جادههای اولیه یک طبقه بسیار ناهمگن را نشان میدهند که برخی از جادهها دارای دو خط هستند و برخی دیگر ممکن است حتی آسفالت نباشند. جادههای طبقهبندینشده دوباره با جادههای عمدتاً آسفالتنشده که سرعتهای سریعتر در آنها امکانپذیر نیست، همگنتر هستند.
Fuzzy-FSE ارائه شده برای کاربردهای روستایی طراحی شده است. در ترافیک مناطق شهری و برون شهری، تعداد پیچها یا محدودیتهای سرعت محلی نقش بسیار بیشتری در تخمین سرعت نسبت به سطح، طول پیوند، شیب و کلاس جاده ایفا میکنند. به طور خاص، ترافیک یک عامل بسیار بزرگ در محیط شهری است که نمی توان آن را تنها از داده های OSM تخمین زد. برآوردهای ترافیک به داده هایی در مورد ظرفیت جاده و حجم وسایل نقلیه در روز یا ساعت نیاز دارند. علاوه بر این، ترافیک عاملی است که از نظر زمانی با ساعات اوج مصرف در صبح و عصر و تقریباً بدون ترافیک در شب بسیار متغیر است. بنابراین، گنجاندن ترافیک در فازی-FSE با داده های موجود امکان پذیر نیست و بنابراین هدف این مطالعه نیست. به علاوه محدودیت سرعت در مناطق شهری در تعریف سرعت MF لحاظ نشده است. فازی-FSE قادر به تمایز بین مناطق شهری و روستایی نیست زیرا مجموعه داده OSM حاوی اطلاعاتی در مورد تراکم جمعیت نیست. بنابراین، مقادیر سرعت تخمینی در مراکز شهری باید با احتیاط رفتار شود. علاوه بر این، جاده ها در مناطق شهری اغلب دارای اطلاعات سرعت هستند، همانطور که در مجموعه داده های OSM برچسب وجود داردحداکثر سرعت در مراکز شهری بیشتر از مناطق روستایی پر می شود. این امر نیاز به محاسبه میانگین سرعت برای زیرساخت جاده های شهری را کاهش می دهد.
در مقایسه با مطالعه قبلی خود [ 18 ]، ما مقادیر سرعت را به جای زمان سفر تجزیه و تحلیل می کنیم. همانطور که مشخص است، ارزیابی زمان سفر اطلاعات کمی در مورد کیفیت تخمین ارائه می دهد. مقادیر بسیار کمی وجود دارد که سه چهارم بالایی محدوده را تشکیل می دهند. این منجر به مقادیر بالای R2 گمراه کننده می شود . FCS توسعه یافته در [ 18 ] بدتر یا برابر با خط پایه است، هم مقادیر سرعت و هم زمان سفر را تجزیه و تحلیل می کند.
داده های GD-API به عنوان داده های مرجع برای Fuzzy-FSE اعمال می شوند. همانطور که در بخش 3.3 ذکر شد ، برخی ناسازگاریها بین دادههای Google Maps و دادههای OSM وجود دارد. آمار خطا در بخش 5 بر این موضوع تاکید دارد. برخی از خطاها قابل تشخیص نیستند و به عنوان داده های مرجع در نظر گرفته می شوند که نتایج را جعل می کند. بنابراین، داده های GD-API تنها تا حدی به عنوان داده های مرجع معتبر مناسب هستند. با این حال، مجموعه داده های مرجع دیگری که به راحتی در دسترس هستند و دارای پوشش جهانی هستند وجود ندارند.
در نهایت، اگر فازی-FSE توسعهیافته قرار است در منطقه دیگری اعمال شود، محدودیتهای آن باید در نظر گرفته شود. Fuzzy-FSE ترافیک یا سایر عوامل زمانی مانند دید یا فعالیت حیات وحش را در زمانهای خاصی از روز در نظر نمیگیرد. بنابراین، مقادیر سرعت محاسبه شده باید به عنوان تخمین های تقریبی در نظر گرفته شوند تا مقادیر دقیق. با این حال، برآوردهای بهتر به داده های ورودی بیشتری نسبت به داده های OSM نیاز دارند. همانطور که در بالا توضیح داده شد، برای مناطق شهری نیز کاربرد ندارد، زیرا از یک طرف عوامل در محیط های شهری متفاوت است و نمی توان از داده های OSM برداشت کرد. از سوی دیگر، سرعتهای MF متفاوتی برای هر کلاس جاده در داخل شهرها مورد نیاز است زیرا محدودیتهای سرعت بسیار کمتر از خارج از شهرها است. بدین ترتیب، فازی-FSE برای مناطقی که شبکه راه ها عمدتاً از خیابان های روستایی یا به عنوان بخشی از ابزاری که روش محاسبه متفاوتی برای مقادیر میانگین سرعت شهری دارد، قابل استفاده است. یکی از محدودیتهای اصلی از ماهیت کنترل فازی ناشی میشود و وابستگی فازی-FSE به دانش تخصصی است. نسبت به دانش نادرست بسیار حساس است، اما می توان با مقایسه نتایج با داده های درست زمینی کافی آن را تشخیص داد. به طور کلی، Fuzzy-FSE قادر است پارامترهای بیشتری را شامل شود، اما یک FCS به خوبی مقیاس نمی شود، زیرا تعداد قوانین مورد نیاز تقریباً به عنوان حاصل ضرب تعداد دسته های پارامترهای ورودی افزایش می یابد. یکی از محدودیتهای اصلی از ماهیت کنترل فازی ناشی میشود و وابستگی فازی-FSE به دانش تخصصی است. نسبت به دانش نادرست بسیار حساس است، اما می توان با مقایسه نتایج با داده های درست زمینی کافی آن را تشخیص داد. به طور کلی، Fuzzy-FSE قادر است پارامترهای بیشتری را شامل شود، اما یک FCS به خوبی مقیاس نمی شود، زیرا تعداد قوانین مورد نیاز تقریباً به عنوان حاصل ضرب تعداد دسته های پارامترهای ورودی افزایش می یابد. یکی از محدودیتهای اصلی از ماهیت کنترل فازی ناشی میشود و وابستگی فازی-FSE به دانش تخصصی است. نسبت به دانش نادرست بسیار حساس است، اما می توان با مقایسه نتایج با داده های درست زمینی کافی آن را تشخیص داد. به طور کلی، Fuzzy-FSE قادر است پارامترهای بیشتری را شامل شود، اما یک FCS به خوبی مقیاس نمی شود، زیرا تعداد قوانین مورد نیاز تقریباً به عنوان حاصل ضرب تعداد دسته های پارامترهای ورودی افزایش می یابد.
8. نتیجه گیری و چشم انداز
ما یک Fuzzy-FSE ایجاد می کنیم که از چندین FCS برای تخمین سرعت متوسط از پارامترهای کلاس جاده، شیب جاده، سطح جاده و طول پیوند استفاده می کند. همه این پارامترها را می توان از منبع باز و OSM داده های موجود در سراسر جهان استخراج یا محاسبه کرد. گنجاندن داده های SRTM برای تخمین شیب جاده آزمایش شده است اما نتایج را فقط اندکی بهبود می بخشد. داده های GD-API به عنوان داده های مرجع و به عنوان پایه ای برای محاسبه پایه عمل می کند. کاربردهای نمونه در مورد مطالعات موردی در مناطق BioBío و Maule در شیلی و شمال نیو ساوت ولز در استرالیا کاربردپذیری را در دو منطقه مجزا نشان میدهد که در وضعیت توسعه و کیفیت دادههای OSM متفاوت هستند. مقادیر میانگین سرعت در مقایسه با روش های موجود و در مقایسه با مطالعه قبلی ما در [ 18 ] بهتر تخمین زده می شود].
Fuzzy-FSE توسعه یافته مزایای Fuzzy Control را ارائه می دهد. این شامل پارامترهای ورودی فازی و فرآیند استدلال یک اپراتور انسانی است. برخلاف رویکردهای یادگیری ماشینی، به داده های آموزشی نیازی نیست زیرا مبتنی بر دانش تخصصی است. با این حال، باید در نظر گرفت که توانایی یک FCS برای عملکرد خوب به طراحی آن بستگی دارد. بنابراین، Fuzzy-FSE بسیار بیشتر از مدل یادگیری ماشینی مستعد فرضیات نادرست است.
مزیت اصلی Fuzzy-FSE توسعه یافته، قابلیت انتقال در سراسر جهان برای تخمین میانگین سرعت در مناطق روستایی است. هنگام استفاده از Fuzzy-FSE برای یک منطقه متفاوت، باید در نظر گرفت که Fuzzy-FSE برای تخمین سرعت متوسط در مناطق شهری طراحی نشده است. منطقه ای که شامل مناطق روستایی و شهری است، علاوه بر فازی-FSE، به روش شناسی متفاوتی برای بخش شهری منطقه نیاز دارد. برای تخمین مقادیر متوسط سرعت برای یک منطقه مختلف، فقط سرعت MF باید با استفاده از دانش متخصص در مورد منطقه مطالعه جدید تطبیق داده شود. علاوه بر این، Fuzzy-FSE تنها با داده های OSM قادر به تخمین سرعت متوسط است. این امکان یک برنامه بسیار سریع را بدون پیش پردازش زیاد فراهم می کند. هم خط پایه حد سرعت ثابت و هم فازی-FSE در مناطقی که توزیع سرعت در هر کلاس جاده نسبتاً یکنواخت است بهترین عملکرد را دارند. با این حال، مزیت دیگر Fuzzy-FSE این است که حتی اگر محدوده مقادیر سرعت در هر کلاس جاده زیاد باشد، همچنان می تواند نتایج خوبی به دست آورد. این جایی است که، در مقایسه، محدودیت سرعت ثابت شکست می خورد.
یافته های این مطالعه می تواند در کاربردهای مختلفی مورد استفاده قرار گیرد. بیشتر موتورهای مسیریابی به جای استفاده از پروفیل های سرعت ثابت برای هر کلاس جاده، می توانند Fuzzy-FSE را شامل شوند. بسیاری از مطالعات در مورد زیرساخت های جاده ای حیاتی بر داده های زمان سفر تجاری به عنوان یک عامل هزینه در شبکه جاده ها تکیه می کنند. آنها می توانند از مقادیر متوسط سرعت تخمینی در مناطق روستایی بسیار سود ببرند.
در تحقیقات آینده، هدف ما استفاده از روشهای مبتنی بر داده مانند مدلهای مختلف یادگیری ماشین برای تخمین سرعت متوسط است. علاوه بر این، حداقل مربعات بهینهسازی میتواند توابع عضویت بهینه و همچنین مجموعه قوانینی را پیدا کند که FCS را به بهترین وجه بر اساس حقیقت زمین تطبیق دهد. سپس عملکرد این روش ها را می توان با نتایج فازی-FSE مقایسه کرد. Fuzzy-FSE خود قابل گسترش است زیرا دادههای منابع داده اضافی میتوانند پارامترهایی با تنوع زمانی مانند دید یا ترافیک را معرفی کنند. روش های دیگری برای تقریب شیب جاده مانند استفاده از رابطه بین سرعت رانندگی و شعاع گردش نیز می تواند اجرا شود. علاوه بر این، میتوان بررسی کرد که آیا میتوان Fuzzy-FSE را با شرایط شهری با سرعت MF مختلف و احتمالاً پارامترهای ورودی متفاوت تطبیق داد. سپس نتیجه شامل دو فازی-FSE متفاوت است: یکی برای محیط های شهری و دیگری برای محیط های روستایی. علاوه بر این، تحلیلهای بیشتری از جمله مناطق مورد مطالعه مختلف با کیفیتهای متفاوت دادههای OSM انجام میشود. به ویژه، شامل کشورهای پرجمعیت تر مانند آلمان می تواند جالب باشد. کاربرد در مناطق مطالعه بیشتر و متفاوت، تجزیه و تحلیل حساسیت دقیق نسبت به پارامترهای ورودی را امکان پذیر می کند.
منابع
- استانوجویچ، آر. آببر، س. Mokbel, M. W-edge: توزین لبه های شبکه راه. در مجموعه مقالات بیست و ششمین کنفرانس بین المللی ACM SIGSPATIAL در مورد پیشرفت در سیستم های اطلاعات جغرافیایی—SIGSPATIAL ’18 ; ACM Press: سیاتل، WA، ایالات متحده آمریکا، 2018؛ صص 424-427. [ Google Scholar ] [ CrossRef ]
- Knoop، VL; اسنلدر، ام. ون زویلن، اچ جی; Hoogendoorn، شاخصهای آسیبپذیری سطح لینک SP برای شبکههای دنیای واقعی. ترانسپ Res Part A Policy Pract. 2012 ، 46 ، 843-854. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- لی، ایکس. ژائو، ز. زو، ایکس. وایات، تی. مدلهای پوشش و تکنیکهای بهینهسازی برای مکانیابی و برنامهریزی تسهیلات واکنش اضطراری: یک بررسی. ریاضی. روش ها. Res. 2011 ، 74 ، 281-310. [ Google Scholar ] [ CrossRef ]
- اسکات، دی.م. نواک، دی سی؛ اولتمن هال، ال. گوو، اف. شاخص استحکام شبکه: روشی جدید برای شناسایی پیوندهای حیاتی و ارزیابی عملکرد شبکه های حمل و نقل. J. Transp. Geogr. 2006 ، 14 ، 215-227. [ Google Scholar ] [ CrossRef ]
- گوث، جی. وورستورن، اس. براون، AC; کلر، اس. توسعه یک مفهوم عمومی برای تجزیه و تحلیل دسترسی به امکانات اضطراری در زیرساخت های جاده ای حیاتی برای سناریوهای فاجعه: کاربرد نمونه برای آتش سوزی های 2017 در شیلی و پرتغال. نات. خطرات 2019 ، 97 ، 979-999. [ Google Scholar ] [ CrossRef ]
- بارینگتون-لی، سی. Millard-Ball، A. نقشه راه تولید شده توسط کاربر جهان بیش از 80٪ کامل شده است. PLoS ONE 2017 , 12 , e0180698. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- سیپلوچ، بی. یعقوب، ر. وینستانلی، ا. Mooney, P. مقایسه دقت OpenStreetMap برای ایرلند با Google Maps و Bing Maps. در مجموعه مقالات نهمین سمپوزیوم بین المللی ارزیابی دقت فضایی در منابع طبیعی و علوم محیطی ; دانشگاه لستر: لستر، انگلستان، 2010; پ. 4. [ Google Scholar ]
- گیرس، جی اف. Touya, G. Quality Assessment of French OpenStreetMap Dataset: Quality Assessment of French OpenStreetMap Dataset. ترانس. GIS 2010 ، 14 ، 435-459. [ Google Scholar ] [ CrossRef ]
- Haklay, M. اطلاعات جغرافیایی داوطلبانه چقدر خوب است؟ مطالعه تطبیقی OpenStreetMap و مجموعه داده های بررسی مهمات. محیط زیست طرح. B طرح. دس 2010 ، 37 ، 682-703. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- نیس، پ. زیلسترا، دی. Zipf، A. تکامل شبکه خیابانی نقشههای جمعسپاری: نقشه خیابان باز در آلمان 2007–2011. اینترنت آینده 2011 ، 4 ، 1-21. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- جکسون، اس. مولن، دبلیو. آگوریس، پ. کروکس، آ. کرویتورو، آ. استفانیدیس، الف. ارزیابی کامل بودن و خطای مکانی ویژگیها در اطلاعات جغرافیایی داوطلبانه. ISPRS Int. J. Geo-Inf. 2013 ، 2 ، 507-530. [ Google Scholar ] [ CrossRef ]
- دورن، اچ. تورنروس، تی. Zipf، A. ارزیابی کیفیت VGI با استفاده از داده های معتبر – مقایسه با داده های کاربری زمین در جنوب آلمان. ISPRS Int. J. Geo-Inf. 2015 ، 4 ، 1657-1671. [ Google Scholar ] [ CrossRef ]
- Demetriou، D. عدم قطعیت داده های OpenStreetMap برای شبکه جاده در قبرس. در مجموعه مقالات چهارمین کنفرانس بین المللی سنجش از دور و اطلاعات جغرافیایی محیط، پافوس، قبرس، 4 تا 8 آوریل 2016. [ Google Scholar ] [ CrossRef ]
- مارتینی، ا. Kuper، PV; برونیگ، ام. تجزیه و تحلیل تغییر و ارزیابی کیفیت دادههای نقشه خیابان باز با پشتیبانی پایگاه داده. در مجموعه مقالات ISPRS Annals of the Photogrammetry, Remote Sensing and Spatial Information Sciences، ISPRS Geospatial Week 2019، Enschede، هلند، 10-14 ژوئن 2019؛ جلد IV-2/W5، صص 535-541. [ Google Scholar ] [ CrossRef ]
- لودویگ، آی. ووس، ا. Krause-Traudes، M. مقایسه شبکه های خیابانی Navteq و OSM در آلمان. در پیشرفت علم اطلاعات جغرافیایی برای جهانی در حال تغییر . Springer: برلین/هایدلبرگ، آلمان، 2011; صص 65-84. [ Google Scholar ]
- مهابیر، ر. استفانیدیس، ا. کرویتورو، آ. کروکس، آ. Agouris، P. اطلاعات جغرافیایی معتبر و داوطلبانه در یک کشور در حال توسعه: مطالعه موردی مقایسه ای مجموعه داده های جاده ها در نایروبی، کنیا. ISPRS Int. J. Geo-Inf. 2017 ، 6 ، 24. [ Google Scholar ] [ CrossRef ]
- کولیشون، دبلیو. Pilar, JV یک الگوریتم مسیر کمترین هزینه وابسته به جهت برای جاده ها و کانال ها. بین المللی جی. جئوگر. Inf. علمی 2000 ، 14 ، 397-406. [ Google Scholar ] [ CrossRef ]
- استوتزر، جی. وورستورن، اس. کلر، اس. برآورد فازی زمان سفر پیوند از یک مدل ارتفاع دیجیتال و سطح سلسله مراتب جاده. در مجموعه مقالات پنجمین کنفرانس بین المللی نظریه، کاربردها و مدیریت سیستم های اطلاعات جغرافیایی ; SCITEPRESS – انتشارات علم و فناوری: هراکلیون، کرت، یونان، 2019; صص 15-25. [ Google Scholar ] [ CrossRef ]
- Guth، J. Johannaguth/Fuzzy-Framework-for-Speed-Estimation: اول، انتشار. نسخه v0.1. 2019. در دسترس آنلاین: https://doi.org/10.5281/zenodo.3530687 (در 16 ژانویه 2020 قابل دسترسی است).
- ORS. OpenRouteService: API خدمات فضایی با ویژگی های فراوان. 2018. در دسترس آنلاین: https://openrouteservice.org/ (دسترسی در 30 نوامبر 2018).
- لوکسن، دی. Vetter, C. مسیریابی بلادرنگ با داده های OpenStreetMap. در مجموعه مقالات نوزدهمین کنفرانس بین المللی ACM SIGSPATIAL در مورد پیشرفت در سیستم های اطلاعات جغرافیایی-GIS ’11 ; ACM Press: Chicago, IL, USA, 2011; پ. 513. [ Google Scholar ] [ CrossRef ]
- OTP. OpenTripPlanner – برنامه ریزی سفر چند وجهی. 2018. در دسترس آنلاین: https://www.opentripplanner.org/ (در 30 نوامبر 2018 قابل دسترسی است).
- مال شما YourNavigation — مسیریابی در سراسر جهان در داده های OpenStreetMap. 2018. در دسترس آنلاین: https://yournavigation.org (در 30 نوامبر 2018 قابل دسترسی است).
- ویکی OSM. استفاده از OpenStreetMap: OpenStreetMap Wiki. 2016. در دسترس آنلاین: https://wiki.openstreetmap.org/ (در 30 نوامبر 2018 قابل دسترسی است).
- استایگر، ای. رایلوف، م. Zipf، A. Echtzeitverkehrslage basierend auf OSM-Daten im OpenRouteService. AGIT J. 2016 ، 2 ، 264-267. [ Google Scholar ]
- بهرا، SK اتصال شمال شرق هند به بنگلادش: مطالعه پیوندهای حمل و نقل. Ph.D. پایان نامه، دانشکده مطالعات بین المللی، دانشگاه جواهر لعل نهرو، دهلی نو، هند، 2008. [ Google Scholar ]
- برابین، ال. Skelly، C. دسترسی جغرافیایی به خدمات، بهداشت (GASH): مدل سازی دسترسی جمعیت به بیمارستان های عمومی نیوزلند. در مجموعه مقالات سیزدهمین کنفرانس سالانه مرکز تحقیقات اطلاعات فضایی، دوندین، نیوزیلند، 2 تا 5 دسامبر 2001. پ. 11. [ Google Scholar ]
- ممدانی، ه.ح. Assilian, S. آزمایشی در سنتز زبانی با کنترل کننده منطق فازی. بین المللی J. Man-Mach. گل میخ. 1975 ، 7 ، 1-13. [ Google Scholar ] [ CrossRef ]
- وانگ، XJ; ژائو، RH; عملیات کنترل سیلاب Hao، YW بر اساس تئوری مجموعه های فازی متغیر. منبع آب مدیریت 2011 ، 25 ، 777-792. [ Google Scholar ] [ CrossRef ]
- Shackelford، A. دیویس، سی. یک رویکرد ترکیبی مبتنی بر پیکسل فازی و مبتنی بر شی برای طبقهبندی دادههای چند طیفی با وضوح بالا در مناطق شهری. IEEE Trans. Geosci. Remote Sens. 2003 , 41 , 2354–2364. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- تانگ، ایکس. نیش، ی. Kainz، W. روابط توپولوژیکی فازی بین اشیاء فضایی فازی. در سیستم های فازی و کشف دانش ; Wang, L., Jiao, L., Shi, G., Li, X., Liu, J., Eds. Springer: برلین/هایدلبرگ، آلمان، 2006; صص 324-333. [ Google Scholar ]
- هیوارد، جی. دیویدسون، V. برنامه های کاربردی منطق فازی. Analyst 2003 , 128 , 3. [ Google Scholar ] [ CrossRef ]
- داس، RD; Winter, S. چارچوب تشخیص حالت حمل و نقل مبتنی بر منطق فازی در محیط شهری. جی. اینتل. ترانسپ سیستم 2018 ، 22 ، 478-489. [ Google Scholar ] [ CrossRef ]
- Jantzen، J. مبانی کنترل فازی . John Wiley & Sons, Ltd.: Chichester, UK, 2007. [ Google Scholar ] [ CrossRef ]
- محمود، کنترل فازی، تخمین و تشخیص MS ; Springer International Publishing: Cham, Switzerland, 2018. [ Google Scholar ] [ CrossRef ]
- داگلاس، دی اچ. الگوریتم های Peucker، TK برای کاهش تعداد نقاط مورد نیاز برای نمایش یک خط دیجیتالی یا کاریکاتور آن. کارتوگر. بین المللی جی. جئوگر. Inf. جئوویس. 1973 ، 10 ، 112-122. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- ناسا؛ USGS. ماموریت توپوگرافی رادار شاتل. 1 قوس دوم خالی پر شده است. 2013. در دسترس آنلاین: https://earthexplorer.usgs.gov (در 25 مه 2018 قابل دسترسی است).
- شاخ، B. سایه تپه و نقشه بازتاب. Proc. IEEE 1981 ، 69 ، 14-47. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- چن، ایکس. لی، ز. وانگ، ی. کوی، ز. شی، سی. وو، اچ. ارزیابی تأثیر درجه ها بر سرعت خودرو در بزرگراه های بین ایالتی. PLoS ONE 2017 , 12 , e0184142. [ Google Scholar ] [ CrossRef ] [ PubMed ][ نسخه سبز ]
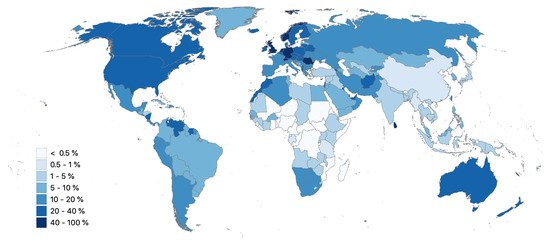
شکل 1. نسبت طول کل جاده ها با اطلاعات حداکثر سرعت در OpenStreetMap (OSM) ( برچسب حداکثر سرعت ) در هر کشور (فقط طبقات جاده در جدول 1 ). فقط 7.47.4درصد از تمام عناصر جاده ذخیره شده در مجموعه داده جهانی OSM منتشر شده در اکتبر 2019 دارای اطلاعات حداکثر سرعت هستند.
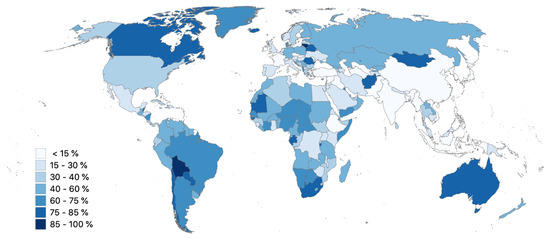
شکل 2. نسبت طول کل جاده ها با اطلاعات سطح در OSM ( برچسب سطح ) در هر کشور (فقط طبقات جاده در جدول 1 ).
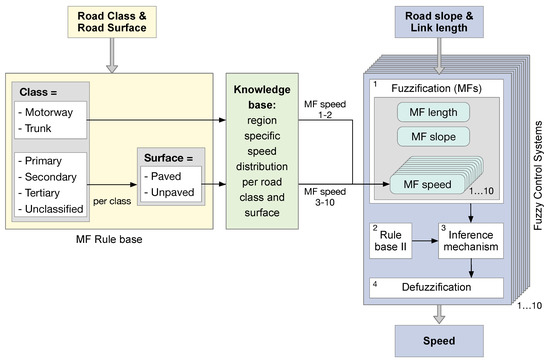
شکل 3. طرح چارچوب فازی برای تخمین سرعت (Fuzzy-FSE) با چهار پارامتر ورودی: کلاس جاده، سطح جاده، شیب جاده و طول پیوند. در ترکیب با پایگاه دانش، پایه قانون تابع عضویت (MF) ده MF مختلف را برای سرعت پارامتر خروجی تشکیل می دهد.
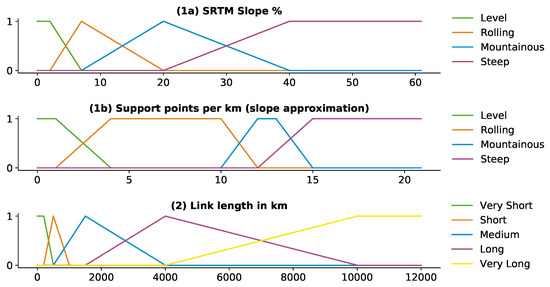
شکل 4. MF پارامترهای ( 1a ) شیب ماموریت توپوگرافی رادار شاتل (SRTM)، ( 1b ) نقاط پشتیبانی در هر کیلومتر و ( 2 ) طول پیوند.
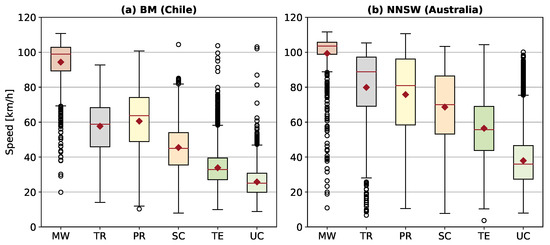
شکل 5. نمودارهای جعبه ای توزیع سرعت به ازای کلاس جاده داده های مرجع برای ( الف ) مناطق BioBío و Maule (BM) (شیلی) و ( b ) شمال نیو ساوت ولز (NNSW) (استرالیا). کلاس های جاده: MW— بزرگراه ، TR— Trunk ، PR— Primary ، SC— Secondary ، TE— Tertiary ، UC— طبقه بندی نشده . الماس های قرمز در جعبه ها نماد میانگین مربوطه، خطوط قرمز مقدار میانگین مربوطه هستند. حد پایین هر جعبه صدک 25 است ( س 1س1، حد بالایی صدک 75 ( س 3س3) به طوری که اختلاف محدوده بین چارکی را می سازد ( منQ Rمنسآر). سبیل ها به Q 1 − 1.5 ∗ IQ Rس1-1.5∗منسآرو Q 3 + 1.5 ∗ IQ Rس3+1.5∗منسآر. هر نقطه فراتر از سبیل ها پرت هستند و به صورت دایره ترسیم می شوند.
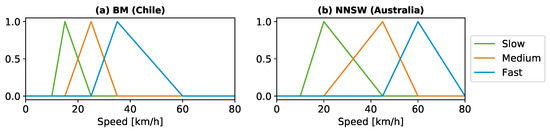
شکل 6. سرعت نمونه ای MF برای ( الف ) مناطق BM (شیلی) و ( ب ) NNSW (استرالیا) برای کلاس = سوم و سطح = بدون سنگفرش . تمام سرعت های MF را در [ 19 ] ببینید.
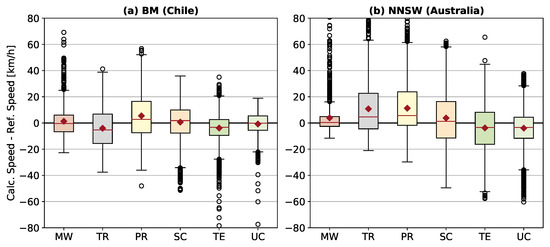
شکل 7. نمودارهای جعبه ای از توزیع تفاوت بین سرعت های محاسبه شده و داده های سرعت مرجع GD-API در هر کلاس جاده در ( a ) مناطق BM و ( b ) NNSW. هر دو OSM و SRTM به عنوان داده ورودی استفاده می شوند. مقادیر منفی نشان دهنده مقادیر سرعت تخمینی کمتر از مقادیر سرعت مرجع است. کلاس های جاده: MW— بزرگراه ، TR— Trunk ، PR— Primary ، SC— Secondary ، TE— Tertiary ، UC— طبقه بندی نشده . الماس های قرمز در جعبه ها نماد میانگین مربوطه، خطوط قرمز مقدار میانگین مربوطه هستند. حد پایین هر جعبه صدک 25 است ( س 1س1، حد بالایی صدک 75 ( س 3س3) به طوری که اختلاف محدوده بین چارکی را می سازد ( منQ Rمنسآر). سبیل ها به Q 1 − 1.5 ∗ IQ Rس1-1.5∗منسآرو Q 3 + 1.5 ∗ IQ Rس3+1.5∗منسآر. هر نقطه فراتر از سبیل ها پرت هستند و به صورت دایره ترسیم می شوند.
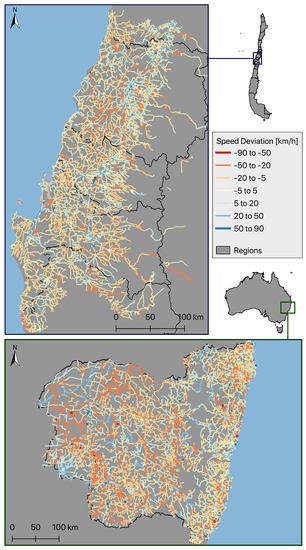
شکل 8. نقشه تفاوت بین سرعت محاسبه شده و سرعت مرجع در مناطق BM در شیلی ( بالا ) و در NNSW در استرالیا ( زیر ). مقادیر منفی (قرمز و نارنجی) نشان دهنده مقادیر سرعت تخمینی کمتر از مقادیر سرعت مرجع است.


بدون دیدگاه