

خلاصه
کلید واژه ها:
لیدار ; تنظیم نوار ؛ الگوریتم رای گیری تانسور ; قدرت ویژگی سطح
1. معرفی
2. اطلاعات ویژگی های هندسی
2.1. قدرت ویژگی هندسی
شما و لین [ 3 ، 35 ] نشان دادید که الگوریتم TVM برای استخراج ویژگی های هندسی از ابرهای نقطه لیدار مناسب است. با استفاده از TVM، ویژگی های هندسی هر نقطه لیدار را می توان با یک تانسور مرتبه دوم به صورت زیر نشان داد [ 34 ]:
که در آن λ 1 , λ 2 و λ 3 مقادیر ویژه تانسور T هستند و v 1 , v 2 , و v 3 بردارهای ویژه متناظر هستند. ویژگی های هندسی یک نقطه لیدار را می توان با توجه به قوانین زیر [ 34 ] دریافت کرد: ویژگی های نقطه ( λ1≈λ2≈λ3)�1≈�2≈�3)را می توان بر حسب λ 3 ، ویژگی های خطی بیان کرد ( λ1≈λ2≫λ3)�1≈�2≫�3)را می توان بر حسب (λ 2 – λ 3 ) و ویژگی سطح ( λ1≫λ2≈λ3�1≫�2≈�3) را می توان بر حسب ( λ 1 – λ 2 ) بیان کرد. تجزیه دقیق تانسورها و رابطه بین تانسورها و ویژگی های هندسی یک نقطه را می توان با مراجعه به [ 3 ، 34 ] به دست آورد.
رابطه هندسی بین یک نقطه مورد نظر و نقاط مجاور آن در یک منطقه مشخص را می توان از تانسور T در معادله (1) هنگام استفاده از الگوریتم TVM تعیین کرد. پس از پردازش TVM، ویژگی هندسی اصلی یک نقطه را می توان با استفاده از مقادیر ویژه λ 1 ، λ 2 و λ 3 تانسور T با توجه به قوانین ثبت فوق تعیین کرد. نقاط قوت ویژگی هندسی ممکن است تحت تأثیر تعداد نقاط مجاور قرار گیرد. برای غلبه بر این تأثیر، You و Lin [ 3 ] نرمال کردن مقادیر نقاط قوت ویژگی را به شرح زیر پیشنهاد کردند:
جایی که 0 ≤سیس،سیل،سیپ≤ 10≤��,��,��≤1و سیس+سیل+سیپ= 1 .��+��+��=1.قدرت ویژگی سطح ( سیس��برای تنظیم نوار در مطالعه ما از داده ها و ارتفاع نقاط لیدار استفاده شد.
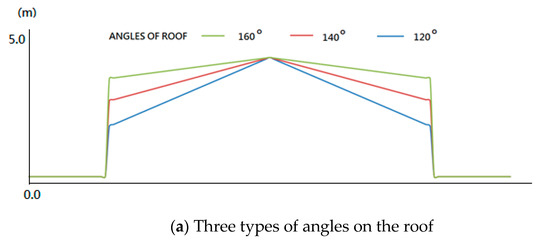
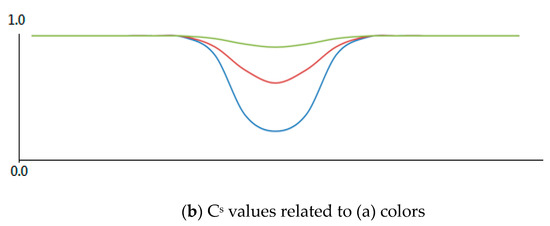
2.2. ویژگی های قدرت ویژگی سطح
3. تنظیم نوار
3.1. مدل های ریاضی و تنظیمات شبکه
هر نوار Lidar به یک مدل تبدیل شباهت هفت پارامتری اختصاص داده می شود و این پارامترها برای جذب خطاهای جابجایی بین نوارهای همپوشانی استفاده می شوند. مدل به صورت زیر بیان می شود:
که در آن عناصر ماتریس چرخشی R (αj،βj،γj)آر(��،��،��)به شرح زیر است:
یک سری شبکه های مربعی ابتدا در مناطق پروازی برای اتصال نوارهای مختلف تنظیم می شوند. مختصات ( x , y ) هر نقطه شبکه مشخص شده و به صورت زیر محاسبه می شود:
جایی که ( م0،ن0م0،ن0) مختصات شناخته شده نقطه اصلی شبکه پیوسته و G طول داده شده یک شبکه مربع است. ارتفاع ( زs ، t)زس،تی)و قدرت ویژگی سطح (سیs ، t)(سیس،تی)از هر نقطه شبکه توابعی از مختصات ( ایکسس،Yتی)ایکسس،�تی)، به این معنا که، زs ، tزس،تی= fز�ز( ایکسس،Yتی)ایکسس،�تی)و سیs ، tسیس،تی= fسی�سی( ایکسس،Yتی)ایکسس،�تی). داده های قدرت ویژگی ارتفاع و سطح هر نقطه لیدار را می توان از نقاط شبکه با استفاده از درون یابی دوخطی [ 26 ] استخراج کرد:
با وارد کردن معادله (2) در معادلات (5) و (6) و همچنین “خطاهای کل” v z و v C ، معادلات مشاهده پیچیده زیر برای طرح تنظیم نوار ما اتخاذ میشوند:
جایی که ایکسjمن،yjمن،zjمنایکسمن�،�من�،�من�و سیjمنسیمن�مقادیر اندازه گیری مختصات و مقدار مقاومت ویژگی سطح را به ترتیب در یک نقطه Lidar نشان می دهد. متغیرهای باقی مانده در توابع F z و F C ناشناخته هستند، از جمله پارامترهای تبدیل هر نوار و ارتفاعات و مقادیر مقاومت ویژگی سطح نقاط شبکه.
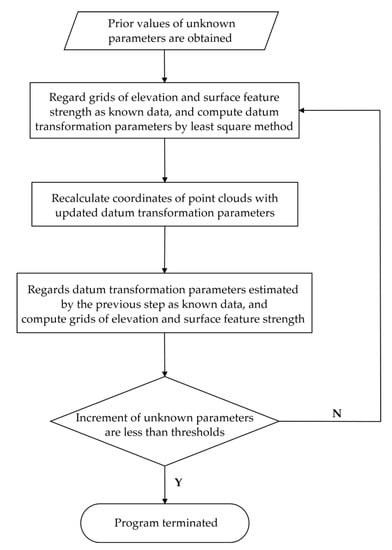
3.2. روش PLS
4. آزمایش ها و بحث
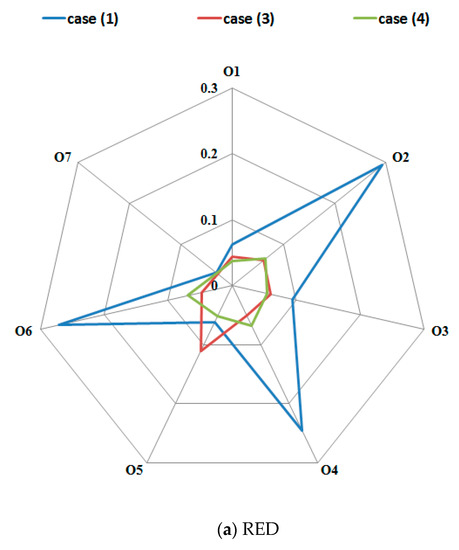
در این مطالعه، دقت نتایج تعدیل با استفاده از دو شاخص کیفیت یعنی انحراف نسبی (RED) و انحراف مطلق (ABD) مورد ارزیابی قرار گرفت. RED با استفاده از تمام باقیماندههای مشاهدات در صفحات بررسی به شرح زیر محاسبه شد:
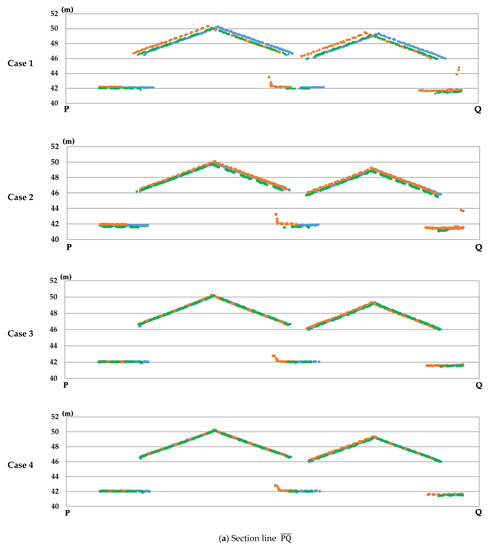
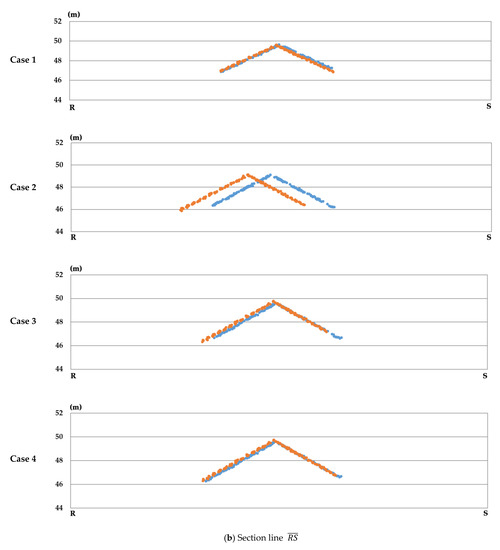
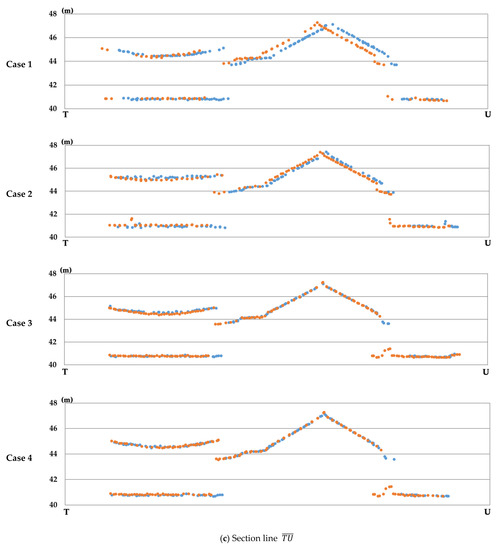
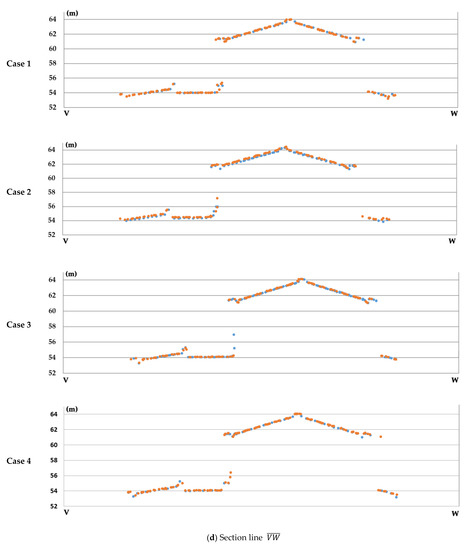
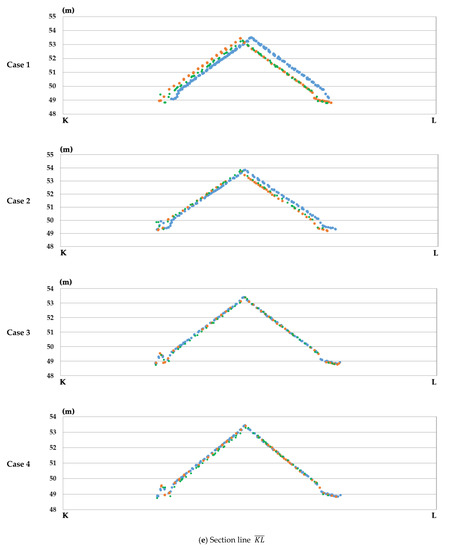
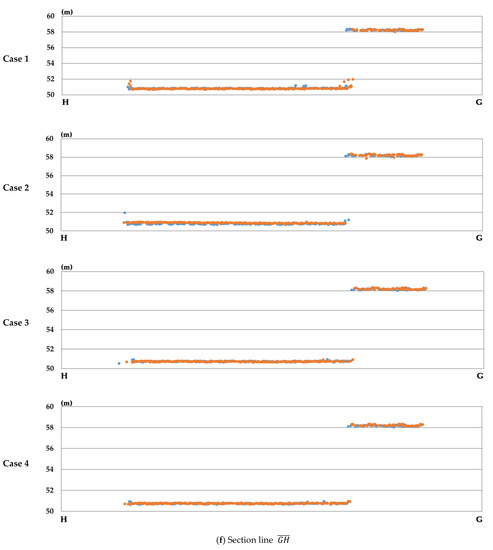
که در آن n تعداد نقاط لیدار است. قرمز را می توان برای آشکار کردن کیفیت تطابق بین نوارها پس از تنظیم استفاده کرد. باقی مانده vz��در موارد 2-4 برابر با مقدار z -مشاهده منهای مقدار z تنظیم شده بود، در حالی که در مورد 1، مقدار باقیمانده vz��از تفاوت در داده های z کالیبره شده همان شی در نوارهای مجاور محاسبه شد. موارد 1-4 در پاراگراف زیر تعریف شده است.
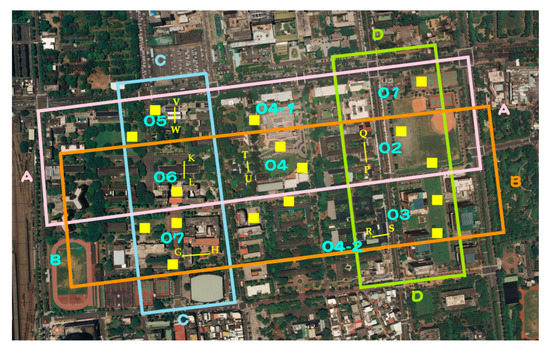
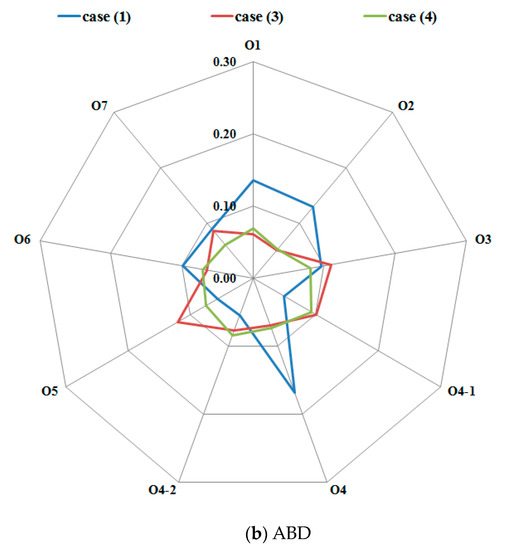
اندازه گیری 20 هواپیمای چک مسطح با استفاده از سه تا پنج نقطه از طریق موقعیت یابی GPS سینماتیک (RTK-GPS) در زمان واقعی با استفاده از گیرنده جی پی اس Leica SR530 انجام شد. چنین صفحات بررسی برای بررسی خارجی نتایج تنظیم استفاده شد ( شکل 4 ). شاخص ABD را می توان به صورت زیر بیان کرد:
که در آن n مجموع تعداد نقاط بازرسی را در تمام این صفحات بررسی نشان می دهد، دwمن=z“wمن–∑مترk = 1zwک ، جی پیاس دمن�=�”من�-∑ک=1متر�ک،جیپاس �/m (m = 3~5) نشان دهنده ارتفاع باقی مانده از نقطه لیدار در w امین صفحه تخت است، و zwک ، جی پی اس�ک، جیپاس�نشاندهنده ارتفاع اندازهگیری k امین GPS در صفحه مسطح w است. ارتفاعات GPS و ارتفاع نقاط لیدار با مراجعه به سیستم ارتفاعی یکسان در این مطالعه به دست آمد.
5. نتیجه گیری ها
منابع
- اوزجان، ق. Ünsalan، C. LiDAR فیلتر کردن داده ها و تولید DTM با استفاده از تجزیه حالت تجربی. IEEE J. Sel. بالا. Appl. زمین Obs. Remote Sens. 2016 , 10 , 360–371. [ Google Scholar ] [ CrossRef ]
- رن، ی. چن، ز. چن، جی. هان، ی. وانگ، ی. الگوریتم موازی فرآیند/رشته ترکیبی برای تولید DEM از نقاط LiDAR. ISPRS Int. J. Geo-Inf. 2017 ، 6 ، 300. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- شما، RJ; استخراج ویژگی Lin, BC Building از دادههای لیدار هوابرد بر اساس الگوریتم رای گیری تانسور. فتوگرام مهندس Remote Sens. 2011 ، 77 ، 1221-1231. [ Google Scholar ] [ CrossRef ]
- آلبرز، بی. کادا، م. Wichmann, A. استخراج خودکار و منظم کردن خطوط کلی ساختمان از ابرهای نقطه ای LIDAR در هوا. ISPRS-Int. قوس. فتوگرام حسگر از راه دور اسپات. Inf. علمی 2016 ، 41 ، 555-560. [ Google Scholar ] [ CrossRef ]
- ویس، یو. بیبر، پ. لابل، اس. بوهلمان، ک. Zell, A. طبقه بندی گونه های گیاهی با استفاده از حسگر سه بعدی LIDAR و یادگیری ماشینی. در مجموعه مقالات نهمین کنفرانس بین المللی 2010 در مورد یادگیری ماشین و برنامه های کاربردی، واشنگتن، دی سی، ایالات متحده آمریکا، 12-14 دسامبر 2010. صص 339-345. [ Google Scholar ]
- فنگ، Q. زو، دی. یانگ، جی. Li، B. ترکیب داده های فراطیفی چند منبعی و LiDAR برای نقشه برداری کاربری زمین شهری بر اساس یک شبکه عصبی پیچیده دو شاخه ای اصلاح شده. ISPRS Int. J. Geo-Inf. 2019 ، 8 ، 28. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- پیربهای، ک. موتانگا، او. قرعه کشی، ر. بانگاموابو، وی. اسماعیل، R. تشخیص فراوانی گیاه حشره (Solanum mauritianum) در جنگل کاری مزارع با استفاده از سنجش از دور چند منبعی. ISPRS J. Photogramm. Remote Sens. 2016 , 121 , 167–176. [ Google Scholar ] [ CrossRef ]
- عجازی، ع.ک. چچین، پ. Trassoudaine, L. تشخیص و بهروزرسانی تغییرات در ابرهای نقطه لیدار برای نقشهبرداری خودکار سه بعدی شهری. ISPRS Ann. فتوگرام سنسور از راه دور Spat Inf. علمی II 2013 ، 2 ، 7-12. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- کوین، آر. تیان، جی. Reinartz، P. تشخیص تغییر سه بعدی – رویکردها و برنامه ها. ISPRS J. Photogramm. Remote Sens. 2016 ، 122 ، 41-56. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- مالت، سی. برتار، F. لیدار توپوگرافی شکل موج کامل: پیشرفته ترین. J. Photogramm. Remote Sens. 2009 ، 64 ، 1-16. [ Google Scholar ] [ CrossRef ]
- الکساندر، سی. Tansey، K. کادوک، جی. هلند، دی. Tate، NJ Backscatter ضریب به عنوان یک ویژگی برای طبقهبندی دادههای اسکن لیزری هوابرد شکل کامل در مناطق شهری. ISPRS J. Photogramm. Remote Sens. 2010 , 65 , 423-432. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- هاینزل، جی. Koch، B. بررسی پارامترهای LiDAR شکل موج کامل برای طبقه بندی گونه های درختی. بین المللی J. Appl. زمین Obs. Geoinf. 2011 ، 13 ، 152-160. [ Google Scholar ] [ CrossRef ]
- هوفل، بی. هالاس، ام. Hagenauer, J. تشخیص پوشش گیاهی شهری با استفاده از دادههای LiDAR هوابرد با ردپای کوچک با ردپای کوچک کالیبرهشده. ISPRS J. Photogramm. Remote Sens. 2012 ، 67 ، 134-147. [ Google Scholar ] [ CrossRef ]
- Lemmens، MJPM اطلاعات ارتفاع دقیق از ارتفاع سنجی لیزری هوابرد. در مجموعه مقالات سمپوزیوم بین المللی زمین شناسی و سنجش از دور IEEE 1997. سنجش از دور – چشم انداز علمی برای توسعه پایدار، سنگاپور، 3 تا 8 اوت 1997. جلد 1، ص 423-426. [ Google Scholar ]
- Schenk, T. مدلسازی و تحلیل خطاهای سیستماتیک در اسکنرهای لیزری هوابرد . گزارش فنی فتوگرامتری شماره 19; گروه مهندسی عمران و محیط زیست و علوم زمین شناسی، دانشگاه ایالتی اوهایو: کلمبوس، OH، ایالات متحده آمریکا، 2001; 40p [ Google Scholar ]
- وهر، آ. Lohr، اسکن لیزری هوابرد – مقدمه و نمای کلی. ISPRS J. Photogramm. Remote Sens. 1999 ، 54 ، 68-82. [ Google Scholar ] [ CrossRef ]
- سیسانی، ن. Toth, C. بهبود دقت داده های LiDAR با استفاده از اهداف زمینی خاص LiDAR. فتوگرام مهندس Remote Sens. 2007 , 73 , 385-396. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- توث، سی. پاسکا، ای. Brzezinska, D. استفاده از خط کشی های روسازی جاده به عنوان کنترل زمینی برای داده های Lidar. بین المللی قوس. فتوگرام حسگر از راه دور اسپات. Inf. علمی 2008 ، 36 ، 173-178. [ Google Scholar ]
- اسکالود، ج. لیچتی، دی. رویکرد دقیق به کالیبراسیون خودکاهشی در اسکن لیزری هوابرد. ISPRS J. Photogramm. Remote Sens. 2006 ، 61 ، 47-59. [ Google Scholar ] [ CrossRef ]
- اسکالود، ج. Schaer, P. به سمت خود کالیبراسیون بینایی LiDAR خودکار. در مجموعه مقالات پنجمین سمپوزیوم بین المللی فناوری نقشه برداری موبایل، پادوآ، ایتالیا، 28 تا 31 مه 2007. [ Google Scholar ]
- حبیب، اف. Bang، KI; شین، SW; خود کالیبراسیون سیستم Mitishita، E. LiDAR با استفاده از تکه های مسطح از داده های فتوگرامتری. در مجموعه مقالات پنجمین سمپوزیوم بین المللی فناوری نقشه برداری موبایل، پادوآ، ایتالیا، 28 تا 31 مه 2007. [ Google Scholar ]
- فریچ، دی. Kilian, J. فیلترینگ و کالیبراسیون اندازهگیریهای اسکنر لیزری. در مجموعه مقالات آرشیو بین المللی فتوگرامتری و سنجش از دور، مونیخ، آلمان، 17 اوت 1994; جلد 2357، ص 227–234. [ Google Scholar ]
- کیلیان، ج. هالا، ن. انگلیسی، ام. ضبط و ارزیابی داده های اسکنر لیزری هوابرد. در مجموعه مقالات آرشیو بین المللی فتوگرامتری و سنجش از دور، وین، اتریش، 12 تا 18 ژوئیه 1996; جلد 31، ص 383-388. [ Google Scholar ]
- Crombaghs، MJE; دی مین، ای جی; بروگلمن، آر. در مورد تنظیم نوارهای همپوشانی داده های ارتفاع سنج لیزری. بین المللی قوس. فتوگرام Remote Sens. 2000 , 33 , 230-237. [ Google Scholar ]
- ووسلمن، جی. Maas، تنظیم HG و فیلتر کردن داده های ارتفاع سنجی لیزری خام. در مجموعه مقالات کارگاه OEEPE در مورد اسکن لیزری هوا و SAR تداخل سنجی برای مدل های ارتفاع دیجیتال دقیق، استکهلم، سوئد، 1-3 مارس 2001. صص 62-73. [ Google Scholar ]
- Burman, H. کالیبراسیون و جهت گیری داده های تصویر هوابرد و اسکنر لیزری با استفاده از GPS و INS. Ph.D. پایان نامه، موسسه سلطنتی فناوری، استکهلم، سوئد، 2000. [ Google Scholar ]
- Maas, HG Methods for Measuring Height and Planimetry Disconcepances in Airborne Laser Scanner Datas. فتوگرام مهندس Remote Sens. 2002 ، 68 ، 933-940. [ Google Scholar ]
- ژانگ، ی. Xiong، X. ژنگ، م. Huang, X. LiDAR Strip Adjustment با استفاده از چند ویژگی منطبق با تصاویر هوایی. IEEE Trans. Geosci. Remote Sens. 2015 ، 53 ، 976-987. [ Google Scholar ] [ CrossRef ]
- Filin, S. حذف خطاهای سیستماتیک از داده های اسکن لیزری هوابرد. در مجموعه مقالات کنفرانس IEEE IGARSS 2005، سئول، کره، 25 تا 29 ژوئیه 2005. صص 517-521. [ Google Scholar ]
- لی، جی. یو، ک. کیم، ی. Habib، AF تنظیم اختلاف بین نوارهای داده LIDAR با استفاده از ویژگی های خطی. IEEE Geosci. سنسور از راه دور Lett. 2007 ، 4 ، 475-479. [ Google Scholar ] [ CrossRef ]
- هوفل، بی. Pfeifer، N. تصحیح داده های شدت اسکن لیزری: داده ها و رویکردهای مدل محور. ISPRS J. Photogramm. Remote Sens. 2007 , 62 , 415-433. [ Google Scholar ] [ CrossRef ]
- جوتزی، بی. ناخالص، H. عادی سازی داده های شدت LiDAR بر اساس محدوده و زاویه برخورد سطحی. بین المللی قوس. فتوگرام Remote Sens. 2009 , 38 , 213-218. [ Google Scholar ]
- Yan، WY; Shaker, A. تصحیح رادیومتری و عادی سازی داده های شدت LiDAR موجود در هوا برای بهبود طبقه بندی پوشش زمین. IEEE Trans. Geosci. Remote Sens. 2014 , 52 , 7658–7673. [ Google Scholar ]
- مدیونی، جی. لی، ام اس; تانگ، CK یک چارچوب محاسباتی برای تقسیم بندی و گروه بندی . Elsevier Science: نیویورک، نیویورک، ایالات متحده آمریکا، 2000; 260p. [ Google Scholar ]
- شما، RJ; Lin، BC یک روش پیشبینی کیفیت برای بازسازی مدل ساختمان با استفاده از دادههای لیدار و نقشه توپوگرافی. IEEE Trans. Geosci. Remote Sens. 2011 , 49 , 3471–3480. [ Google Scholar ] [ CrossRef ]
- لی، CL; شما، RJ Lidar Strip Adjustment با داده های ارتفاع و قدرت ویژگی. در مجموعه مقالات بیست و نهمین کنفرانس آسیایی سنجش از دور، کلمبو، سریلانکا، 10 تا 14 نوامبر 2008. [ Google Scholar ]
- لی، CL; شما، مکانیسم RJ برای تنظیم نوار لیدار با داده های ارتفاع و قدرت ویژگی. در مجموعه مقالات سی امین کنفرانس آسیایی سنجش از دور، پکن، چین، 18 تا 23 اکتبر 2009. [ Google Scholar ]
- هلند، IS در ساختار رگرسیون حداقل مربعات جزئی. اشتراک. آمار شبیه سازی محاسبه کنید. 1988 ، 17 ، 581-607. [ Google Scholar ] [ CrossRef ]
- هلند، IS جزئی رگرسیون حداقل مربعات و مدل های آماری. Scand. J. Stat. 1990 ، 17 ، 97-114. [ Google Scholar ]
- یانگ، PJ فرمول بندی مجدد الگوریتم رگرسیون حداقل مربعات جزئی. SIAM J. Sci. محاسبه کنید. 1994 ، 15 ، 225-230. [ Google Scholar ] [ CrossRef ]
- کورمن، تی. استین، سی. ریست، آر. Leiserson, C. Introduction to Algorithms , 3rd ed.; آموزش عالی McGraw-Hill: نیویورک، نیویورک، ایالات متحده آمریکا، 2009. [ Google Scholar ]
- رائو، CR; Toutenburg, H. Linear Models: Least Squares and Alternatives , 2nd ed.; Springer: نیویورک، نیویورک، ایالات متحده آمریکا، 1999. [ Google Scholar ]
- Grafarend، EW; کروم، اف. اوکه، F. تبدیلات مبدأ ژئودزیکی منحنی. Oceanogr. روشن شد Rev. 1996 , 2 , 135. [ Google Scholar ]
- کلاین، اچ. Förstner, W. تحقق تشخیص خودکار خطا در برنامه تنظیم بلوک PAT-M43 با استفاده از برآوردگرهای قوی. بین المللی قوس. فتوگرام Remote Sens. 1984 , 25 , 234-245. [ Google Scholar ]
- Helmert، PR Die Ausgleichsrechnung Nach der Methode der Kleinsten Quadrate ; Springer: لایپزیگ، آلمان، 1924. [ Google Scholar ]


بدون دیدگاه