

خلاصه
در حالی که الگوی جاده بر مسیریابی و ناوبری تأثیر می گذارد، تأثیر آن بر رفتارهای نگاه عابران پیاده به خوبی مستند نشده است. در این مطالعه، ما تفاوتهای رفتار نگاه را بین الگوهای جادههای منظم و نامنظم با استفاده از فناوری ردیابی چشم مقایسه کردیم. بیست و یک شرکتکننده وظایف جهتگیری (ORI) و انتخاب کوتاهترین مسیر (SRS) را با هر دو الگوی جاده انجام دادند. ما از دقت پاسخ ها و زمان پاسخ برای تخمین عملکرد کلی و زمان تا اولین مدت تثبیت، میانگین مدت تثبیت، تعداد تثبیت و مدت زمان تثبیت برای تخمین رفتار نگاه استفاده کردیم. نتایج نشان داد که شرکت کنندگان با استفاده از الگوهای جاده نامنظم با دقت بهتر پاسخ ها بهتر عمل کردند. برای هر دو کار و هر دو الگوی جاده، مناطق مورد علاقه برچسب (AOI) (شامل مغازه ها و تابلوها) توجه سریعتر یا بیشتری را دریافت کردند. الگوهای جاده بر رفتار نگاه برای AOIهای جاده و AOIهای برچسب تأثیر گذاشت اما تأثیر بیشتری بر AOIهای جاده در هر دو کار نشان داد. به طور خلاصه، برای جهتگیری و انتخاب مسیر، کاربران بیشتر به برچسبها تکیه میکنند و جادههایی با الگوهای نامنظم مهم هستند. این یافته ها ممکن است به عنوان نقطه لنگر برای تعیین اینکه چگونه رفتار نگاه افراد بسته به الگوی جاده متفاوت است و نشان می دهد که برچسب ها و الگوهای جاده منحصر به فرد باید برای مسیریابی و مسیریابی بهتر برجسته شوند. کاربران بیشتر به برچسب ها تکیه می کنند و جاده هایی با الگوهای نامنظم مهم هستند. این یافته ها ممکن است به عنوان نقطه لنگر برای تعیین اینکه چگونه رفتار نگاه افراد بسته به الگوی جاده متفاوت است و نشان می دهد که برچسب ها و الگوهای جاده منحصر به فرد باید برای مسیریابی و مسیریابی بهتر برجسته شوند. کاربران بیشتر به برچسب ها تکیه می کنند و جاده هایی با الگوهای نامنظم مهم هستند. این یافته ها ممکن است به عنوان نقطه لنگر برای تعیین اینکه چگونه رفتار نگاه افراد بسته به الگوی جاده متفاوت است و نشان می دهد که برچسب ها و الگوهای جاده منحصر به فرد باید برای مسیریابی و مسیریابی بهتر برجسته شوند.
کلید واژه ها:
الگوی جاده ؛ جهت گیری ; انتخاب کوتاه ترین مسیر ؛ ردیابی چشم
1. معرفی
الگوهای جاده اطلاعات اساسی را برای فعالیت های سیار، مانند راهیابی، برنامه ریزی مسیر و ناوبری خودکار فراهم می کند. با این حال، آنها نیز پیچیده هستند. الگوهای جاده ها از نظر ناهمگونی، اتصال، دسترسی، قابلیت اتصال [ 1 ] و غیره متفاوت است [ 2 ، 3 ]. این سیستم های پیچیده نه تنها بر عملکرد سیستم های حمل و نقل [ 4 ] و کاربری زمین [ 5 ] تأثیر می گذارند، بلکه به شدت بر رفتارهای افراد تأثیر می گذارند [ 6 ، 7 ، 8 ، 9 ، 10 ]]. بسیاری از محققان بر روی ویژگیهای هندسی الگوهای جاده و راهحلهای ناوبری بر اساس کوتاهترین مسیرهای زمان/فاصله [ 11 ، 16، 12 ] یا سایر شرایط عینی [ 13 ]. با این حال، مردم تنها بر اساس ویژگی های هندسی عمل نمی کنند. برای مثال، رانندگان اغلب کوتاهترین مسیر را طی نمیکنند، و عابران پیاده حتی آزادی بیشتری در انتخاب حرکت خود دارند [ 14 ]. هنگام انتخاب یک مسیر، مردم تمایل دارند جاده های مستقیم نزدیک مبدا را انتخاب کنند [ 15 ]. ادراک عابران پیاده از زمان سفر تحت تأثیر ساختار شبکه [ 2]، که ممکن است بر انتخاب مسیر آنها تأثیر بگذارد. بنابراین، بررسی چگونگی درک و تعامل مردم با الگوهای جاده و اینکه کدام اطلاعات در این فرآیند مهم است، ضروری است.
محققان مدتهاست به تأثیر الگوهای جاده بر رفتار، مانند عملکرد رانندگی، ایمنی ترافیک [ 17 ] و انتخاب مسیر علاقهمند بودهاند. یعقوب و همکاران [ 18 ] و گرین [ 19 ] افزایش بار کاری را برای رانندگان در منحنی های شعاع کوچکتر و زاویه انحراف بالاتر در مناطق روستایی دریافتند. بر خلاف نظر رایج که پیچ ها برای ترافیک خطرناک هستند، هاینز و همکاران. [ 20 ] دریافتند که از منظر ناحیه، جاده های مستقیم تر منجر به تصادفات بیشتری می شود و تصادفات جاده ای مرگبار با زاویه جاده ها ارتباط منفی دارد. ژانگ و همکاران [ 21] ارتباط بین تصادفات غیرخودرو (یعنی عابران پیاده و دوچرخه سواران) و ساختار شبکه جاده در شهرستان آلامدا، کالیفرنیا را تجزیه و تحلیل کرد و دریافت که تقاطع های بیشتر بین جفت جاده ها برای عابران پیاده ایمن تر است. این مطالعه نشان داد که برنامه ریزان می توانند مسیرهای بریده شده را برای بهبود ایمنی ترافیک برای عابران پیاده مسدود کنند. با این حال، ناراحتی ناشی از تقاطع های بیشتر ممکن است عابران پیاده را از استفاده از آنها باز دارد، که اهمیت در نظر گرفتن احساسات مردم را برجسته می کند. علاوه بر این، انتخاب مسیر افراد نیز تحت تأثیر الگوهای جاده است، همانطور که مطالعات بر اساس مسیرهای رفت و آمد سیستم موقعیت یابی جهانی (GPS) [ 2 ، 16 ]، شرایط واقعی پیاده روی [ 22 ، 23 ، 24 ، نشان داده شده است.25 ] و شرایط تجربی [ 26 ، 27 ]. تحقیقات Hochmair و Karlsson [ 28 ] در مورد ترجیح استراتژی در انتخاب مسیر نشان می دهد که فرآیندهای شناختی متفاوتی بین ناوبری های مبتنی بر نقشه و مبتنی بر دید رخ می دهد. برای مثال، انتخاب مسیر مبتنی بر نقشه شامل بخشهای مستقیم اولیه طولانیتر است، در حالی که کاربران مبتنی بر نما، بخشهای کوتاه را ترجیح میدهند. هر دو Parthasarathi، Levinson و Hochmair [ 2 ] و D’Acci [ 25 ] دریافتند که الگوی جاده بر درک زمان عابران پیاده تأثیر می گذارد، شرکت کنندگان در مطالعه اخیر جاده های منحنی را ترجیح می دهند.
محققان تلاش کرده اند این تفاوت های رفتاری را توضیح دهند. مطالعات مبتنی بر رفتار در دنیای فیزیکی نشان میدهد که این تفاوتها ممکن است به تأثیر الگوهای جاده در قضاوت معیارهای مکانی مرتبط باشد. بایرن [ 29 ] دریافت که شرکت کنندگان تمایل دارند طول مسیرهای کوتاه و مسیرهایی با پیچ های اصلی را بیش از حد تخمین بزنند اما مسیرهای مستقیم را نه. در همین حال، تخمین زوایای تقاطع بدون توجه به زاویه واقعی (60-70 درجه یا 110-120 درجه) در محله مسکونی آنها تقریباً 90 درجه است. R. Montello [ 30] از شصت عابر پیاده در سه منطقه آزمایشی (یکی متعامد و دو مورب به الگوی شبکه محلی) خواست تا به چندین هدف محلی نامرئی یا جهت مسیر اصلی اشاره کنند. او دقت اشاره و زمان پاسخ را در این شبکهها مقایسه کرد و نتایج نشان داد که شرکتکنندگان با خیابانهای متعامد نسبت به خیابانهای مایل با دقت بیشتری اشاره کردند. با توجه به شرایط پیچیده در دنیای واقعی، مطالعات اخیر به طور مستقیم فرآیندهای شناختی را با الگوهای جاده های مختلف در شرایط آزمایشگاهی بسیار کنترل شده بررسی می کنند. به عنوان مثال، لیو و همکاران. [ 31] بر اساس آزمایش fMRI (تصویربرداری تشدید مغناطیسی عملکردی) تحقیقاتی را در مورد شناخت با الگوهای مختلف جاده گزارش کرد. آنها در یک کار جهت یابی با الگوی جاده نامنظم (در مقایسه با یک الگوی جاده معمولی)، در نواحی مغز مربوط به شناخت و حرکت چشم، فعالیت بیشتری را مشاهده کردند، که نشان می دهد جهت یابی با الگوی جاده نامنظم دشوارتر است. این مطالعات نشان می دهد که رفتارها و شناخت افراد می تواند تحت تاثیر الگوهای جاده ای باشد. با این حال، از آنجایی که الگوهای جاده در چنین مطالعاتی به طور یکپارچه در نظر گرفته میشوند، روشن کردن جنبههای الگوی جاده مسئول تفاوتها دشوار است. در این مطالعه، ما به طور جداگانه جاده و برچسب ها را برای تشخیص مؤلفه تأثیرگذار تجزیه و تحلیل کردیم.
فنآوری ردیابی چشم، که مبتنی بر فرض ذهن چشم [ 32 ] است، معمولاً برای تعیین نحوه پردازش اطلاعات توسط افراد استفاده میشود [ 32 ، 33 ، 34 ، 35 ، 36 ]. از آنجایی که راه رفتن در جاده ها به اطلاعات بصری قابل توجه و سوئیچ های توجه زیادی نیاز دارد، فناوری ردیابی چشم برای ناوبری [ 37 ] و تحقیقات مرتبط با جاده [ 34 ، 38 ] قابل استفاده است. هپرل و فون استولپناگل [ 39 ] رفتار نگاه را در طول یادگیری و بازیابی مسیر عمدی و اتفاقی مقایسه کردند و دریافتند که تفاوت اصلی مربوط به اشیایی است که شرکت کنندگان آنها را مشاهده نکرده اند. لیائو و همکاران [40 ] از دادههای حرکت چشم برای استنباط وظایف ناوبری عابران پیاده از پنج کار ممکن استفاده کرد و دقت طبقهبندی کلی 67 درصد را به دست آورد. فوتیوس و همکاران [ 38 ] طراحی روشنایی مناسب برای عابران پیاده پس از تاریکی را با تجزیه و تحلیل جایی که مردم توجه خود را معطوف می کنند بررسی کردند و به اهمیت تامین روشنایی کافی برای افراد و مسیرهای دیگر نتیجه گرفتند. با این حال، این مطالعه در یک دوره پیاده روی انجام شد و وظایف خاصی را مشخص نکرد. کیتازاوا و فوجیاما [ 41 ] دادههای ردیابی چشم شرکتکنندگان را در حین راه رفتن تجزیه و تحلیل کردند و دریافتند که عابران پیاده معمولاً روی صحنهای که مستقیماً در مقابل خود هستند تمرکز میکنند و فضای پردازش اطلاعات شبیه یک مخروط است. ترفزگر و همکاران [ 42] نشان داد که عابران پیاده و دوچرخه سواران بیشترین توجه را در مسیر پیمایش به مسیر داشتند. Giannopoulos، Kiefer و Raubal [ 43 ] همچنین از فناوری ردیابی چشم برای کمک به ناوبری عابران پیاده استفاده کردند و برنامه GazeNav خود را بر روی تلفن هوشمند نصب کردند. اگر کاربر به خیابان درست نگاه کند، این برنامه باعث میشود گوشی هوشمند به لرزه درآید. این مطالعات نشان می دهد که داده های حرکت چشم در تحقیقات مربوط به جاده ارزشمند است.
در این مطالعه، ما با هدف شناسایی تفاوتهای نگاه عابر پیاده بین الگوهای جاده منظم و الگوهای جاده نامنظم برای وظایف ناوبری و شناسایی نقش برچسب و اطلاعات جاده در این فرآیند. ما الگوهای جادهها را به الگوهای نامنظم و منظم دستهبندی کردیم، از شرکتکنندگان خواستیم وظایف جهتیابی (ORI) و انتخاب کوتاهترین مسیر (SRS) را با استفاده از اسکرینشاتهای نمای خیابان در هر دو نوع الگوی جاده انجام دهند و حرکات چشم شرکتکنندگان را در طول کارها ثبت کردیم. با تجزیه و تحلیل حرکات چشم بر روی اطلاعات جاده و برچسب، اطلاعاتی را که برای وظایف ناوبری مهم است و تفاوتهای بین الگوهای جادهای متمایز بررسی کردیم. نتایج بینش هایی را در مورد طراحی های جاده بهبود یافته ارائه می دهد.
بخش دوم این مقاله روشهای آزمایشی را معرفی میکند، از جمله مروری بر طراحی آزمایشی، شرکتکنندگان، دستگاهها، مواد، روشها و روشهای تحلیل دادهها. بخش سوم و چهارم به ترتیب نتایج را گزارش می کنند و نتایج را مورد بحث قرار می دهند. بخش پنجم این مطالعه را به پایان می رساند و کار آینده را پیشنهاد می کند.
2. مواد و روشها
2.1. طراحی تجربی
در این تحقیق جاده ها بر اساس الگوی خود به دو دسته طبقه بندی شدند. جادههای دارای تقاطعهای متعامد و بخشهای مستقیم به عنوان الگوهای جادهای منظم و آنهایی که دارای تقاطعهای غیرمتعامد یا بخشهای منحنی بهعنوان الگوهای نامنظم بودند [ 39 ، 44 ]. ما یک طرح درون شرکتکنندگان را اعمال کردیم، که در آن به شرکتکنندگان دستور داده شد تا وظایف ORI و SRS را در هر دو الگو انجام دهند. این وظایف به این دلیل انتخاب شدند که حس جهت گیری و فاصله را ارائه می کردند. به عنوان بخشی از یک پروژه گسترده تحقیقات شناختی، این مطالعه مبتنی بر ردیابی چشم، طرح تجربی مشابهی را با کار قبلی گزارش شده در [ 31 ] به اشتراک می گذارد.]. با این حال، نتایج این مطالعه قبلی تنها تأثیر الگوهای جادهای را تأیید میکند و نمیتواند توضیح دهد که کدام بخش از الگوی جاده در تأثیر نسبت داده میشود.
آزمایش در دو روز متوالی انجام شد. در روز اول، به شرکتکنندگان دستور داده شد که با دو منطقه آشنا شوند – یک منطقه با الگوی جادهای منظم و منطقهای با الگوی جادهای نامنظم از طریق نقشههای نمای خیابان. در روز دوم، شرکتکنندگان مجموعهای از وظایف ORI و SRS را بر اساس نواحی که قبلاً آموخته بودند، انجام دادند، در حالی که حرکات چشم آنها ثبت شد. اگرچه این مطالعه بر اساس یک شبکه جاده ای تازه آموخته شده بود و شرکت کنندگان شاید قادر به ایجاد یک نقشه شناختی کامل نبودند، اما این نقشه برای انجام یک کار جغرافیایی موفق ضروری نبود [ 45 ]. قبل از آزمایش، ما یک پیش آزمون را انجام دادیم که در آن پنج دانشجو از دانشگاه عادی پکن (BNU) برای تأیید مواد و روش آزمایش شرکت کردند.
2.2. شركت كنندگان
بیست و سه دانشجو که از طریق تبلیغات آنلاین از دانشگاههای پکن استخدام شده بودند در این آزمایش شرکت کردند. دو نفر از دانش آموزان به دلیل مشکلات گزارش شده در یادگیری یا ناراحتی در طول آزمایش، آزمایش را کامل نکردند. 21 شرکتکننده باقیمانده (میانگین سنی = 22.4، انحراف معیار = 2.3؛ 7 مرد و 17 زن؛ 7 با پیشزمینه مرتبط با جغرافیا) آزمایش را تکمیل کردند. با توجه به سیستم مرجع ترجیحی، شش شرکتکننده ترجیح دادند برای یک سیستم مرجع آلوسنتریک (یعنی استفاده از شرق/غرب/شمال/جنوب) برای راهیابی، ده نفر ترجیحی خودمحور (راست/چپ) و پنج نفر هیچ ترجیحی را گزارش نکردند و از هر دو استفاده کردند.
همه شرکت کنندگان بینایی نرمال یا اصلاح شده-طبیعی داشتند و هیچ یک از شرکت کنندگان سابقه بیماری روانی را گزارش نکردند. هفت رکورد برای کار ORI و سه رکورد برای کار SRS حذف شدند زیرا نرخ نمونه (یعنی درصد دادههای حرکت چشم ثبت شده) زیر 70 درصد بود. بنابراین، 14 مجموعه داده حرکت چشم (پنج مورد از مردان) در کار ORI و 18 مجموعه داده حرکت چشم (پنج از مردان) در کار SRS تجزیه و تحلیل شدند. هر شرکت کننده 160 یوان به عنوان غرامت دریافت کرد.
2.3. دستگاه
این آزمایش در یک آزمایشگاه آرام در BNU انجام شد. ما در این مطالعه از ردیاب چشم Tobii T120 (Tobii AB، استکهلم، سوئد؛ www.tobii.com ) با نرم افزار مشابه Tobii Studio 3.2.1 برای ثبت حرکات چشم شرکت کنندگان و صدور داده ها استفاده کردیم. این سخت افزار شامل یک ردیاب چشمی Tobii با نرخ نمونه برداری 60 هرتز و یک نمایشگر 17 اینچی فیلم نازک ترانزیستور (TFT) با وضوح صفحه نمایش 1280 × 1024 پیکسل بود. دقت ضبط ردیاب چشمی 0.5 درجه با وضوح فضایی 0.2 درجه بود. محدوده حرکت مجاز سر 0.2 درجه بود. فاصله ردیابی بین 50 تا 80 سانتی متر بود و در این آزمایش فاصله بین شرکت کننده و مانیتور تقریباً 60 سانتی متر بود.
2.4. مواد
در این مطالعه، ما از نمای خیابان از Google Maps به عنوان ماده آزمایشی برای حذف تأثیر سایر عابران پیاده [ 38 ]، شرایط آب و هوایی و ترافیک استفاده کردیم. ما بخشی از استمفورد، لینکلنشایر، بریتانیا و بخشی از اشتون-آندر-لین، منچستر بزرگ، بریتانیا را به ترتیب به عنوان الگوهای جاده نامنظم و منظم انتخاب کردیم ( شکل 1).، این نقشه ها فقط برای اهداف طراحی بود و به شرکت کنندگان نشان داده نشد). برای از بین بردن اثرات حافظه، ما این دو منطقه مطالعاتی را در بریتانیا انتخاب کردیم تا اطمینان حاصل کنیم که شرکتکنندگان قبلاً با این مناطق آشنا نبودند. محرک ها باید برای شرکت کنندگان قابل درک باشد، زیرا آنها دانشجوی دانشگاه هستند و در آزمون زبان انگلیسی در آزمون ورودی کالج ملی شرکت کرده اند. هیچ یک از پنج شرکت کننده ای که در طول پیش آزمون استخدام شدند، مشکلات یادگیری را گزارش نکردند که به محیط انگلیسی نسبت داده می شد.
هر دو منطقه مورد مطالعه عمدتاً شامل مناطق تجاری در شهرهای کوچک بود که اکثر ساختمانها دو یا سه طبقه و علائم و برچسبهای مختلف داشتند. بنابراین نمای خیابان مناطق، تعداد بیش از حد جمعیت را نشان نمی داد. همانطور که در شکل 1 نشان داده شده است، مناطق آزمایش اولیه در چارچوب قرمز قرار داشتند . پس از پیش آزمون، بخشی از منطقه آزمایشی معمولی قطع شد زیرا شرکت کنندگان نشان دادند که این ناحیه حجم کاری بیشتری ایجاد می کند و در مقایسه با منطقه نامنظم به زمان بیشتری برای یادگیری نیاز دارند. نواحی آزمایشی نهایی در چارچوب آبی نشان داده شده است.
در روز اول، زمانی که از شرکتکنندگان خواسته شد مناطق آزمایش را به خاطر بسپارند، پانلهای کنترل (مثلاً پنجره نقشه کوچک و جعبه اطلاعات مورد استفاده در Google Maps) با استفاده از رابط برنامهنویسی برنامه Google Maps (API، Google [ 46 ]) پنهان شدند. .
اسکرین شات های نمای خیابان (1024 × 640) از این مناطق به عنوان مواد برای وظایف ORI و SRS در روز 2 استفاده شد. همه اسکرین شات های نمای خیابان منحصر به فرد بودند و فقط یک بار استفاده شدند. در این اسکرین شات ها، نام خیابان ها نیز پنهان بود، زیرا معمولاً هیچ نامی در خیابان ها نقاشی نمی شود. ما از مواد پویا یا تعاملی در وظایف ORI و SRS استفاده نکردیم زیرا خود تعامل ممکن است بر توزیع توجه بصری تأثیر بگذارد و اگر از ویدیوهای پویا آماده شده استفاده میکردیم، کنترل تأخیر بهروزرسانی دشوار بود.
2.5. روش
روز اول از آنجایی که شرکت کنندگان قبل از آزمایش مناطق مورد مطالعه را به هیچ وجه نمی دانستند، از آنها خواسته شد تا در روز اول با این مناطق آشنا شوند. ابتدا، محققان جدول زمانی آزمایشی را شامل یک کار نمونه معرفی کردند. شرکت کنندگان یک فرم رضایت امضا شده ارائه کردند و به آنها گفته شد که می توانند در هر مرحله از آزمایش ترک کنند.
سپس شرکتکنندگان به «پیادهروی» در امتداد مرزهای الگوی جادههای نامنظم در نمای خیابان گوگل هدایت شدند. آنها اجازه داشتند آزادانه با ماوس یا صفحه کلید در منطقه حرکت کنند و باید این منطقه را به خاطر بسپارند. هنگامی که شرکت کنندگان آنچه را که در این منطقه به خاطر داشتند گزارش کردند، 10 تا 12 اسکرین شات از نمای خیابان به آنها نشان داده شد و از آنها خواسته شد که نشان دهند آیا اسکرین شات ها جاده هایی را که در 5 ثانیه قبل یاد گرفته بودند (برای هر اسکرین شات) نشان می دهد. شرکت کنندگان باید حداقل 90 درصد دقت را برای شروع همان رویه برای الگوی جاده معمولی به دست آورند. در غیر این صورت، آنها نیاز به تکرار یادگیری و آزمایش الگوی جاده نامنظم داشتند.
روز دوم ابتدا به شرکت کنندگان نشان داده شد و دستورالعمل ها را بدون استفاده از ردیابی چشم توضیح دادند. آنها باید هر دو وظایف نمونه ORI و SRS را انجام دهند تا اطمینان حاصل کنند که دستورالعمل ها را کاملاً درک کرده اند (همانطور که در [ 31 ] توضیح داده شد، که از Baidu Streetview (Baidu Map: https://map.baidu.com/ ) در نزدیکی BNU استفاده می کرد. اطمینان حاصل شود که شرکت کنندگان با محیط آشنا هستند).
سپس وظایف ORI و SRS با ردیابی چشم آغاز شد. از کالیبراسیون پنج نقطه ای استفاده شد. در طول این مرحله وظیفه، هیچ دستورالعمل دیگری ارائه نشد مگر اینکه بخش وظیفه تغییر کند (یعنی از ORI به SRS). وظایف به ترتیب وظایف ORI در یک الگوی جاده نامنظم (irORI)، وظایف ORI در یک الگوی منظم (rORI)، وظایف SRS در یک الگوی جاده نامنظم (irSRS) و وظایف SRS در یک الگوی منظم (rSRS) ارائه شد. هر بخش شامل 10 کار فرعی بود. پس از بخش rORI، شرکت کنندگان اجازه داشتند به چشمان خود استراحت دهند. در هر زیرکار، ابتدا یک ضربدر سفید در وسط یک صفحه سیاه به مدت 1 ثانیه (همانطور که در شکل 2 نشان داده شده است) ارائه شد. دوم، یک اسکرین شات از مقصد ( شکل 3 الف) به مدت 6 ثانیه نمایش داده شد و در آخر، یک اسکرین شات از موقعیت فعلی نشان داده شد (شکل 3 b برای ORI و شکل 3 c برای SRS، وظایف شرح داده شده با شکل ها). در این مرحله، شرکت کنندگان اجازه داشتند با استفاده از صفحه کلید خود بدون محدودیت زمانی انتخاب کنند. برای جلوگیری از حدس زدن تصادفی شرکتکنندگان، به آنها اجازه داده شد تا در صورتی که نمیتوانستند جادهها را به خاطر بیاورند، کلید فاصله را فشار دهند تا از یک کار فرعی رد شوند. هنگامی که آنها انتخاب خود را انجام دادند، کار فرعی بعدی با صفحه سیاه با یک ضربدر سفید شروع شد.
2.6. تحلیل داده ها
یک فیلتر ثابت I-VT (شناسایی آستانه سرعت) با پارامترهای پیشفرض در Tobii Studio برای فیلتر کردن تثبیت استفاده شد. ما مناطق مورد علاقه جاده و برچسب (AOI) را برای انجام تجزیه و تحلیل بیشتر برچسب گذاری کردیم ( شکل 4 ). جادههای AOI نشاندهنده جادهها و مناطق پیاده روی در میدانها بودند. برچسب AOI نشان دهنده علائم مغازه ها، درهای ورودی ساختمان ها و تبلیغات قابل تشخیص است. مناطقی که با فلش ها پوشانده شده بودند حذف شدند زیرا شرکت کنندگان مجبور بودند اغلب پیکان ها را تماشا کنند. ما از Quick Selection در Adobe Photoshop CS6 استفاده کردیم (Adobe Photoshop: https://www.photoshop.com/) برای به دست آوردن شماره پیکسل هر AOI و اعمال این مقدار برای نشان دادن اندازه AOI. اگر چندین AOI برچسب یا جاده وجود داشته باشد، همان نوع AOI در یک گروه AOI جمع میشود.
دقت پاسخ ها و زمان پاسخ برای نشان دادن عملکرد کلی شرکت کنندگان استفاده شد. همانطور که اطلاعات در طول تثبیت پردازش می شود، معیارهای مبتنی بر تثبیت، به ویژه مدت زمان، معمولاً برای تجزیه و تحلیل مربوط به کار استفاده می شود [ 47 ، 48 ]. برای بررسی دقیقتر معیارهای حرکت چشم و معنای شناختی آنها، لطفاً به [ 32 ، 49 ] مراجعه کنید. چهار معیار حرکت چشم استفاده شد ( جدول 1 ): زمان تا اولین تثبیت، که در آن زمان کوتاه تا اولین تثبیت به این معنی است که جسم به سرعت توجه بصری را به خود جلب می کند و دارای هدایت بصری قوی است [ 50 ، 51 ]]؛ میانگین مدت تثبیت، که در آن میانگین طولانی مدت تثبیت نشان دهنده دشواری پردازش بالا [ 47 ، 50 ، 52 ، 53 ] در مسیریابی عابر پیاده است. تعداد تثبیت، که در آن تعداد تثبیت بالا به معنای بار پردازشی بزرگ است [ 54 ]. و مدت زمان تثبیت (همچنین به عنوان زمان تثبیت [ 47 ] نامیده می شود)، که در آن مدت تثبیت طولانی نشان می دهد که برای پردازش اطلاعات به زمان طولانی نیاز است. از آنجایی که تعداد تثبیت و مدت زمان تثبیت به شدت با اندازه AOI مرتبط است، ما از مقدار اصلی در هر 10000 پیکسل در این تجزیه و تحلیل استفاده کردیم.
ابتدا، نقاط پرت در داده های خام بر اساس قانون سه سیگما حذف شدند. دوم، ما رگرسیون خطی مدل مختلط را برای آزمون آماری انجام دادیم، زیرا دادهها بر اساس آزمایش درون شرکتکننده بودند و مستقل نبودند [ 55 ]. ما معیارهای حرکت چشم را با الگوی جاده و دسته AOI بهعنوان جلوههای ثابت و شرکتکنندگان را بهعنوان اثر تصادفی با استفاده از ماژول مدلهای آماری پایتون پیشبینی کردیم. ما p <0.01 را به عنوان یک تأثیر معنی دار و P > 0.01 را به عنوان هیچ تأثیر معنی داری شناسایی کردیم.
توجه داشته باشید که آزمون آماری به جای سوابق دادهها بر اساس شرکتکنندگان، روی رکوردهای دادههای مبتنی بر AOI اعمال شد. اگر چه هفت نمونه برای وظایف ORI و سه نمونه برای وظایف SRS حذف شدند، همانطور که در بخش شرکت کنندگان ذکر شد، آزمون بر روی صدها رکورد داده انجام شد.
3. نتایج
3.1. عملکرد کلی
جدول 2 دقت پاسخ ها را در الگوهای مختلف جاده نشان می دهد. هم در کار ORI و هم در کار SRS، شرکتکنندگان با الگوهای جادههای نامنظم بهتر عمل کردند، زیرا وظایف فرعی کمتری را نادیده گرفتند یا اشتباه قضاوت کردند و انتخابهای درست تری انجام دادند.
زمان پاسخگویی برای هر چهار دسته از کارها از حدود 8 تا 15 ثانیه متغیر بود. برای یک نوع کار، زمان پاسخ تفاوت قابل توجهی را نشان نمی دهد ( شکل 5 ). شرکت کنندگان زمان یکسانی را برای کارهای مشابه برای الگوهای جاده های مختلف صرف کردند.
3.2. وظیفه ORI
3.2.1. زمان برای اولین تثبیت
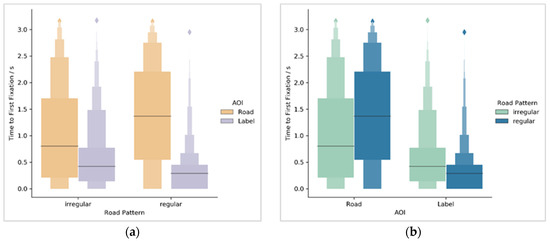
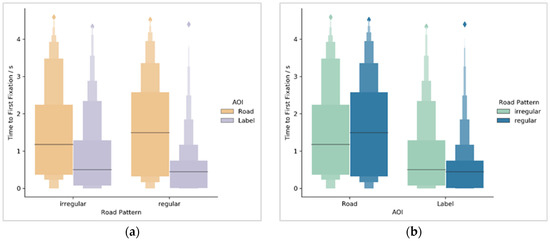
شکل 6 آمار زمان تا اولین تثبیت در کار ORI را نشان می دهد. هم برای الگوی جاده نامنظم و هم برای الگوی جاده معمولی، زمان برای اولین بار تثبیت روی AOIهای برچسب نسبت به AOIهای جاده کوتاهتر بود ( شکل 6 a). تفاوت زمان تا اولین تثبیت بین الگوهای جاده های نامنظم و منظم در کار ORI در شکل 6 ب نشان داده شده است. برای جاده AOI، زمان تا اولین تثبیت با الگوی جاده نامنظم نسبت به الگوی معمولی کوتاهتر بود، در حالی که برای برچسب AOI، این زمان طولانیتر بود.
نتایج رگرسیون خطی مدل مختلط از زمان تا اولین تثبیت در کار ORI در جدول 3 نشان داده شده است. ضرایب الگوی جاده و دسته AOI به ترتیب -0.072 و -0.727 است. با این حال، تنها دسته AOI به طور قابل توجهی به زمان برای اولین بار تثبیت در کار ORI کمک می کند ( p <0.01). این نتیجه نشان میدهد که شرکتکنندگان ابتدا روی برچسبها و سپس در جادهها در هر دو شرایط ثابت شدند. در حالی که شرکتکنندگان تمایل داشتند در جادهها سریعتر ثابت کنند یا برای الگوهای جادههای نامنظم نسبت به الگوهای جادههای معمولی روی برچسبها آهستهتر تثبیت شوند، این تفاوت معنیدار نیست.
3.2.2. میانگین مدت زمان تثبیت
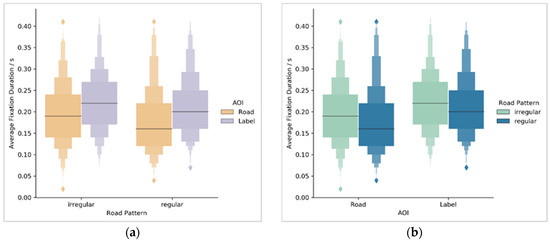
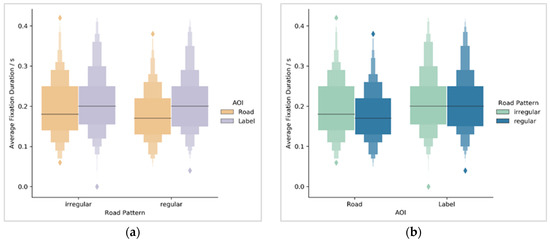
همانطور که در شکل 7 الف نشان داده شده است، برای هر دو الگوی جاده، میانگین مدت تثبیت برای AOIهای برچسب بیشتر از AOIهای جاده بود . برای الگوهای جاده های نامنظم، میانگین مدت تثبیت هم برای جاده ها و هم برای برچسب ها بیشتر از الگوهای معمولی بود ( شکل 7 ب).
جدول 4 نتایج رگرسیون خطی مدل مختلط میانگین مدت تثبیت در کار ORI را نشان می دهد. ضرایب الگوی جاده و دسته AOI به ترتیب -0.013 و 0.024 است. هر دو الگوی جاده و دسته AOI به طور قابل توجهی به میانگین مدت تثبیت در کار ORI کمک می کنند ( 01/ 0p <). دشواری پردازش برای AOIهای برچسب بالاتر از AOIهای جاده بود. شرکت کنندگان تلاش بیشتری برای پردازش اطلاعات جاده و برچسب با الگوهای نامنظم انجام دادند.
3.2.3. تعداد تثبیت
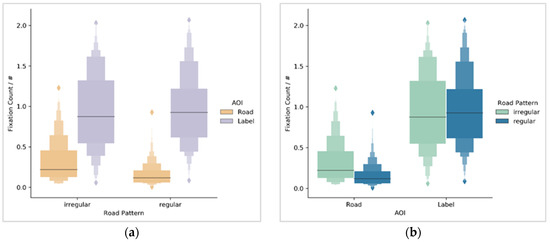
همانطور که در شکل 8 الف نشان داده شده است، تعداد تثبیت برای AOIهای برچسب بیشتر از AOIهای جاده در هر دو الگو بود. تعداد تثبیت برای AOI های جاده برای الگوهای جاده های نامنظم بیشتر از الگوهای معمولی بود، و برای AOI های برچسب کوچکتر از الگوهای جاده های نامنظم بود ( شکل 8 ب).
جدول 5 نتایج رگرسیون مدل مختلط خطی را برای تعداد تثبیت در کار ORI نشان می دهد. ضرایب الگوی جاده و دسته AOI به ترتیب 0.069- و 0.713 است. هر دو الگوی جاده و دسته AOI به طور قابل توجهی به تعداد تثبیت در کار ORI کمک می کنند ( p <0.01). شرکتکنندگان به AOIهای برچسب با الگوهای جادهای نامنظم نسبت به کسانی که الگوهای جاده معمولی داشتند، توجه بیشتری داشتند. شرکت کنندگان بیشتر به AOI های جاده با الگوهای جاده های نامنظم و کمتر به AOI های برچسب با الگوهای جاده های نامنظم توجه کردند.
3.2.4. مدت زمان تثبیت
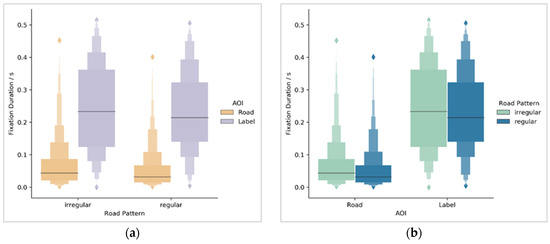
مدت زمان تثبیت نشان می دهد که مدت زمان تثبیت برای AOI های برچسب بیشتر از AOI های جاده برای هر دو الگو بود ( شکل 9 a). تعداد تثبیت برای AOIهای جاده با الگوهای جاده نامنظم بیشتر از موارد با الگوهای منظم بود، اما مدت زمان تثبیت برای AOIهای برچسب با الگوهای نامنظم و منظم مشابه بود ( شکل 9 ب).
همانطور که در جدول 6 نشان داده شده است ، ضرایب الگوی جاده و دسته AOI به ترتیب 0.022- و 0.160 هستند. هر دو عامل به طور قابل توجهی در طول مدت تثبیت ( P <0.01) نقش دارند. شرکت کنندگان توجه بیشتری به AOI های برچسب نشان دادند. از آنجایی که مدت زمان تثبیت برای AOIهای برچسب برای الگوهای نامنظم و منظم تقریباً یکسان است، ما تأثیر دسته AOI را از AOIهای جاده ای فرض می کنیم.
3.3. وظیفه SRS
3.3.1. زمان برای اولین تثبیت
آمار زمان تا اولین تثبیت در کار SRS در شکل 10 نشان داده شده است. همانطور که در شکل 10 a نشان داده شده است، با الگوهای جاده های نامنظم و منظم، زمان برای اولین بار تثبیت برای AOI های برچسب کوتاه تر از AOI های جاده بود. همانطور که در شکل 10 ب برای AOI های جاده نشان داده شده است، زمان اولین تثبیت برای الگوهای جاده های نامنظم نسبت به الگوهای معمولی کوتاه تر بود. برای برچسبهای AOI، زمان اولین تثبیت برای الگوهای جادههای نامنظم کمی طولانیتر بود.
جدول 7 نتایج رگرسیون مدل مختلط خطی را برای زمان تا اولین تثبیت در کار SRS نشان می دهد. ضرایب الگوی جاده و دسته AOI به ترتیب 100/0- و 812/0- هستند. با این حال، سهم الگوی جاده قابل توجه نیست ( p = 0.131). زمان تا اولین تثبیت در کار SRS فقط تحت تأثیر دسته AOI است. شرکتکنندگان مانند وظایف ORI عمل کردند، به این ترتیب که ابتدا روی برچسبها و سپس روی جادهها ثابت شدند.
3.3.2. میانگین مدت زمان تثبیت
همانطور که در شکل 11 a نشان داده شده است، میانگین مدت زمان تثبیت برای AOIهای برچسب بیشتر از AOIهای جاده برای الگوهای جاده نامنظم و الگوهای منظم بود. همانطور که در شکل 11 ب نشان داده شده است، برای AOI های جاده، میانگین مدت زمان تثبیت برای الگوهای جاده های نامنظم بیشتر از الگوهای جاده های معمولی بود. برای برچسبهای AOI، میانگین مدت زمان تثبیت برای جادهها و برچسبها مشابه بود.
جدول 8 نتایج رگرسیون خطی مدل مختلط میانگین مدت تثبیت در کار SRS را نشان می دهد. ضرایب الگوی جاده و دسته AOI به ترتیب 0.009- و 0.021 است. هر دو عامل به طور قابل توجهی کمک می کنند ( 01/ 0p <). میانگین مدت تثبیت در کار SRS هم تحت تأثیر الگوی جاده و هم دسته AOI است. همانطور که در وظایف ORI، دشواری پردازش برای AOIهای برچسب بالاتر بود. مشابه الگوهای مختلف جاده، میانگین مدت تثبیت برای AOIهای برچسب یکسان است. ما فرض می کنیم که تأثیر الگوی جاده از AOI های جاده مشتق شده است. پردازش اطلاعات جاده AOI با الگوهای جاده نامنظم دشوارتر از الگوهای جاده های معمولی است.
3.3.3. تعداد تثبیت
شکل 12 a نشان می دهد که تعداد تثبیت برای AOI های برچسب بیشتر از AOI های جاده ای با هر دو الگو بود. شکل 12 ب نشان می دهد که تعداد تثبیت برای AOIهای جاده و AOIهای برچسب با الگوهای جاده نامنظم بیشتر از الگوهای جاده معمولی است.
جدول 9 نشان می دهد که ضرایب الگوی جاده و دسته AOI به ترتیب 0.006- و 1.346 است. فقط دسته AOI به طور قابل توجهی کمک می کند ( p <0.01). تعداد تثبیت در کار SRS فقط تحت تأثیر دسته AOI است. مشابه با کار ORI، شرکت کنندگان توجه بیشتری به AOIهای برچسب با هر دو الگوی جاده کردند.
3.3.4. مدت زمان تثبیت
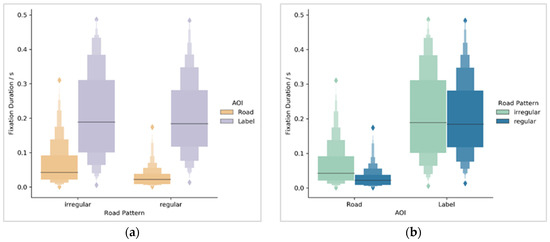
شکل 13 a نشان می دهد که مدت زمان تثبیت برای AOI های برچسب بیشتر از AOI های جاده ای با هر دو الگو بود. شکل 13 ب نشان می دهد که مدت زمان تثبیت برای AOI های جاده و AOI های برچسب برای الگوهای جاده های نامنظم بیشتر از الگوهای معمولی بود.
جدول 10 نشان می دهد که ضرایب الگوی جاده و دسته AOI به ترتیب 013/0- و 180/0 است. دسته AOI به طور قابل توجهی کمک می کند ( p <0.01) و سهم الگوی جاده کمتر معنی دار است ( p = 0.031). تعداد تثبیت در کار SRS تحت تأثیر دسته AOI است. شرکت کنندگان به برچسب AOI با هر دو الگوی جاده توجه بیشتری نشان دادند. اگرچه شرکت کنندگان تمایل بیشتری به AOIهای جاده و AOIهای برچسب برای انجام وظایف با الگوهای جاده نامنظم نسبت به وظایف با الگوهای جاده معمولی داشتند، همانطور که در وظایف ORI، تفاوت قابل توجهی نیست.
4. بحث
4.1. عملکرد در جاده و برچسب AOI
این مطالعه نشان میدهد که برای هر دو وظایف ORI و SRS، شرکتکنندگان ابتدا روی AOIهای برچسب و سپس روی AOIهای جاده با الگوهای جاده نامنظم و منظم تثبیت کردند و تعداد تثبیتهای بیشتر و مدت زمان تثبیت طولانیتری در هر ۱۰۰۰۰ پیکسل برای AOIهای برچسب نسبت به AOIهای جاده داشتند. . آنها همچنین میانگین مدت زمان تثبیت برای Label AOI نسبت به جاده AOI داشتند. برچسبها معمولاً توجه شرکتکنندگان را سریعتر جلب میکنند یا توجه بیشتری را به خود جلب میکنند و همچنین به زمان بیشتری برای پردازش نیاز دارند.
این تفاوت جهانی بین Label و Road AOI در این مطالعه تعجب آور نیست. AOI های جاده در این مطالعه فقط روندها و تقاطع ها را نشان می دهند و در الگوهای جاده های معمولی بسیار شبیه هستند، در حالی که AOI های برچسب در شکل، رنگ و بافت متفاوت هستند و معنای معنایی دارند. بنابراین، AOIهای برچسب دارای درجه بالاتری از تشخیص هستند [ 56 ] و به احتمال زیاد به عنوان نشانه در نظر گرفته می شوند. این یافته با یافته های لیائو و دونگ [ 57 ] مطابقت دارد]، که دریافتند نمایش مدلهای سهبعدی، که برجستهتر از نقشههای دو بعدی هستند، میتواند قابلیت استفاده از نقشه را برای کاربران مرد بهبود بخشد. به طور کلی، اطلاعات برچسب غنی باید برای وظایف ORI و SRS ارائه شود، و سیستم های ناوبری باید اطلاعات برچسب را برجسته کنند، به عنوان مثال، با استفاده از حاشیه نویسی بزرگتر یا رنگ های روشن. از سوی دیگر، با وظایف ORI در الگوهای جادهای نامنظم، شرکتکنندگان سعی کردند به جادهها تکیه کنند، زیرا تفاوت میانگین مدت زمان تثبیت فقط به طور جزئی معنیدار بود. این یافته نشان میدهد که الگوهای منحصربهفرد جادهها نیز میتوانند به مسیریابی کمک کنند. عابران پیاده ممکن است توجه بیشتری به جاده ها داشته باشند اگر جاده ها از نظر بافت متفاوت باشند یا معنای معنایی داشته باشند [ 56 ]، برای مثال، اگر علائم راهنمایی و رانندگی در جاده ها، به ویژه در جاده هایی با الگوهای منحصر به فرد نقاشی شده باشد.
4.2. عملکرد در الگوهای مختلف جاده
شرکت کنندگان با الگوی جاده نامنظم نسبت به الگوی معمولی برای هر دو کار بهتر عمل کردند، زیرا در مدت زمان یکسانی انتخاب های صحیح تری انجام دادند. از آنجایی که ما مناطقی را با سبک ساختمانی مشابه انتخاب کردیم، می توان نتیجه گرفت که تفاوت در الگوی جاده دلیل اصلی تفاوت عملکرد است. در حالی که هیرتل و همکاران. [ 58 ] بیان کرد که تقاطع های مورب می تواند باعث بی جهتی شود، این مطالعه نشان می دهد که الگوهای جاده های نامنظم با انحنا بهتر به خاطر سپرده می شوند. تقاطع های منحصر به فرد در الگوهای جاده های نامنظم اطلاعات غنی تر و مفیدتری را ارائه می دهند. عملکرد بهتر برای الگوهای جاده های نامنظم همچنین ممکن است ترجیح عابران پیاده برای جاده های منحنی در تحقیقات قبلی را توضیح دهد [ 25 ].
دادههای نگاه نشان میدهند که تأثیر الگوی جاده هم توسط جادهها و هم برچسبها ایجاد میشود، اما بیشتر به جادهها مربوط میشود. برای هر دو کار، الگوی جاده بر زمان اولین تثبیت برای جاده AOI یا برچسب AOI تأثیری نداشت. برای وظایف ORI، در مقایسه با الگوی جاده معمولی، شرکتکنندگان میانگین تثبیت طولانیتری برای AOIهای جاده و AOIهای برچسب، تعداد تثبیت بیشتر برای AOIهای جاده و تعداد تثبیت کمتر برای AOIهای برچسب با الگوهای نامنظم داشتند. تفاوت در مدت زمان تثبیت تنها در AOI های جاده مشاهده شد. شرکت کنندگان مدت زمان تثبیت طولانی تری برای AOI های جاده با الگوهای نامنظم داشتند. این تفاوتها نشان میدهد که وظایف ORI با الگوهای جادههای نامنظم سختتر هستند و با یافتههای لیو و همکاران همخوانی دارند. [ 31] بر اساس fMRI. این نویسندگان دریافتند که هنگام انجام وظایف جهتیابی، شرکتکنندگان در نواحی عملکردی مغز که مربوط به تصمیمگیری (شکنج فرونتال میانی و شکنج فرونتال میانی) و حرکت چشم (شکنج پیشانی فوقانی) با الگوی جاده نامنظم بود، فعالیت بیشتری نشان دادند. الگوی منظم در وظایف SRS، تفاوت در میانگین مدت زمان تثبیت بین الگوهای جاده فقط برای AOI های جاده نشان داده شد و شرکت کنندگان میانگین مدت زمان ثابت طولانی تری برای AOI های جاده با الگوهای جاده نامنظم داشتند. این تفاوت نشان میدهد که برای کارهای SRS با الگوهای جادههای نامنظم، احتمال بیشتری وجود دارد که جادهها اطلاعات بیشتری را نسبت به وظایف SRS با الگوهای جادههای معمولی ارائه دهند. در هر دو وظایف ORI و SRS، شرکت کنندگان توجه بیشتری به جاده هایی با الگوهای جاده های نامنظم داشتند. جایی که جاده ها دارای تقاطع ها یا پیچ های منحصر به فرد بودند. اگرچه تفاوتهای رنگ، بافت یا معنایی در بین جادههای مختلف مشاهده نشد، جادهها اطلاعات مهمی بر اساس ساختار ارائه کردند که با نتایج بهدستآمده توسط هیرتل و همکاران همخوانی دارد. [58 ]، که دریافتند تقاطع های منحصر به فرد را می توان به عنوان نشانه در نظر گرفت. بنابراین، برای اهداف ناوبری، برجسته کردن الگوهای جاده با نشان دادن پیچ ها، تقاطع ها و انحناها می تواند مفید باشد. این نتیجه ساخت تقاطع های منحصر به فرد یا جاده های نامنظم را تشویق می کند.
همانطور که گیبسون نشان داد (به طور خلاصه توسط کیچین و بلیدز [ 59])، انتقال ها (یعنی جایی که نما به طور قابل توجهی تغییر می کند) برای راهیابی موفق مهم هستند. انتقال یا زمانی اتفاق میافتد که عابر پیاده از چشمانداز قبلی عبور میکند یا زمانی که یک پیچ وجود دارد. در الگوهای منظم جاده، عابران پیاده همیشه به جلو حرکت می کردند و همیشه پیچ های تند وجود داشت. با این حال، در الگوهای جاده های نامنظم، عابران پیاده ممکن است جهت حرکت را تنظیم کنند، که می تواند اشاره ای به مکان آنها باشد. علاوه بر این، با چرخش های غیر تند، برخی از ساختمان ها در نماهای قبلی می توانند پس از انتقال قابل مشاهده باقی بمانند و به عابر پیاده برای جهت گیری کمک کنند. نتایج نشان میدهد که مردم انتقالها را عمدتاً بر اساس ساختمانها شناسایی میکنند، اگرچه خود جادهها نیز منابع اطلاعاتی مهمی در رابطه با انتقال جهت جهتگیری هستند. بنابراین، با الگوهای جاده های نامنظم که در آن جابجایی ها عمدتا منحصر به فرد هستند،
4.3. محدودیت ها
ما برخی از محدودیتها را شناسایی میکنیم که میتوانند در مطالعات آینده بهبود یابند. مواد مورد استفاده در این مطالعه نماهای خیابان از نقشه های گوگل بود که نماهای خیابانی مشترک در زمان های مختلف گرفته شده بودند. ناهماهنگی برخی از مغازه ها ممکن است باعث سردرگمی شود و بر عملکرد شرکت کنندگان تأثیر بیشتری بگذارد. اگرچه تنها چند تناقض در منطقه مورد مطالعه وجود داشت، اما اگر محیط به درستی کنترل شود (مثلاً در یک محیط واقعیت مجازی) می توان نتایج را بهبود بخشید. افراد همچنین ممکن است در دنیای فیزیکی سه بعدی در مقایسه با محیط آزمایشگاهی بسیار کنترل شده متفاوت عمل کنند. به عنوان مثال، اگر افرادی در اطراف راه می روند، شرکت کنندگان ممکن است توجه بسیار بیشتری به چهره ها داشته باشند. مردم همچنین ممکن است در اطراف مبدا قدم بزنند و اطلاعات را از جهات مختلف در دنیای فیزیکی جمع آوری کنند. علاوه بر این، آزمایش گزارش شده در اینجا به ترتیب نامنظم-منظم ثابت انجام شد، و اگر ترتیب به دلیل اثرات یادگیری متعادل شود، ممکن است عملکرد بهتری برای جادههای نامنظم به دست آید. آزمایش اینکه چگونه این تفاوت با آشنایی بیشتر مردم با شبکه جادهها تغییر میکند، یک مسیر تحقیقاتی جالب در آینده است.
5. نتیجه گیری و کار آینده
در این مطالعه، هدف ما شناسایی این بود که آیا تفاوتهای نگاه بین الگوهای جادههای منظم و نامنظم در طول جهتگیری و انتخاب مسیر رخ داده است یا خیر. ما آزمایشی را انجام دادیم که در آن از 21 شرکتکننده خواسته شد تا جهتگیری نسبی را تعیین کرده و کوتاهترین مسیر را بر اساس فناوری ردیابی چشم انتخاب کنند. ما دریافتیم که عملکرد برای الگوهای جاده های نامنظم بهتر از الگوهای معمولی است. هم برای الگوهای منظم و هم برای الگوهای نامنظم، برچسبها اطلاعات بیشتری را در اختیار شرکتکنندگان قرار میداد و تأثیر الگوی جاده بر نگاه در جادهها بیشتر از برچسبها در هر دو کار بود. شرکتکنندگان بیشتر به جادههایی با الگوهای جادهای نامنظم نسبت به جادههایی با الگوهای منظم تکیه میکردند.
نتایج ممکن است توانایی محدودی برای توضیح تأثیر الگوهای جادهها داشته باشند، زیرا این آزمایش بر روی یک رایانه رومیزی در یک محیط آزمایشگاهی و بر اساس شبکههای جادهای جدید انجام شده است. بنابراین، نتایج ممکن است با بررسی بیشتر بر اساس محیط های غوطه ور یا فیزیکی و در شبکه های جاده ای آشناتر بهبود یابد.
منابع
- زی، اف. لوینسون، دی. اندازه گیری ساختار شبکه های جاده ای. Geogr. مقعدی 2007 ، 39 ، 336-356. [ Google Scholar ] [ CrossRef ]
- پارتاسراتی، پ. لوینسون، دی. Hochmair، H. ساختار شبکه و درک زمان سفر. PLoS ONE 2013 ، 8 ، e77718. [ Google Scholar ] [ CrossRef ] [ PubMed ][ نسخه سبز ]
- لی، اچ. هو، م. Huang, Y. شناسایی خودکار سازه های روگذر: روشی برای یادگیری عمیق. ISPRS Int. J. Geo-Inf. 2019 ، 8 ، 421. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- وانگ، سی. قدوس، م. Ison، SG اثر ترافیک و ویژگی های جاده بر ایمنی راه: بررسی و جهت تحقیقات آینده. Saf. علمی 2013 ، 57 ، 264-275. [ Google Scholar ] [ CrossRef ]
- دورانتون، جی. Puga, D. فصل 8- کاربری اراضی شهری. در کتاب اقتصاد منطقه ای و شهری ; دورانتون، جی.، هندرسون، جی وی، استرنج، WC، ویرایش. الزویر: آمستردام، هلند، 2015; جلد 5، ص 467–560. [ Google Scholar ]
- بن بسات، تی. شینار، دی. تأثیر عرض شانه، نرده محافظ و هندسه راه بر ادراک و رفتار راننده. اسید. مقعدی قبلی 2011 ، 43 ، 2142-2152. [ Google Scholar ] [ CrossRef ] [ PubMed ]
- لی، ز. وانگ، دبلیو. لیو، پی. Ragland، DR محیطهای فیزیکی بر ادراک دوچرخهسواران از راحتی در امکانات دوچرخه جداشده و در خیابان تأثیر میگذارند. ترانسپ Res. قسمت D Transp. محیط زیست 2012 ، 17 ، 256-261. [ Google Scholar ] [ CrossRef ]
- بلا، اف. درک راننده از پیکربندی های کنار جاده در جاده های روستایی دو خطه: تأثیرات بر سرعت و قرارگیری جانبی. اسید. مقعدی قبلی 2013 ، 50 ، 251-262. [ Google Scholar ] [ CrossRef ]
- Gargoum, SA; البسیونی، ک. کیم، الف. به سوی تنظیم محدودیتهای سرعت معتبر: شناسایی عواملی که بر انطباق راننده در جادههای شهری تأثیر میگذارند. اسید. مقعدی قبلی 2016 ، 95 ، 138-148. [ Google Scholar ] [ CrossRef ]
- خو، جی. لو، ایکس. شائو، ی.-ام. مسیر وسیله نقلیه در بخش های منحنی جاده های کوهستانی دو خطه: مطالعه میدانی در شرایط رانندگی طبیعی یورو ترانسپ Res. Rev. 2018 , 10 , 12. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- آکاساکا، ی. Onisawa، T. سیستم ناوبری عابر پیاده شخصی شده با انتخاب مسیر مبتنی بر اولویت ذهنی. در سیستم های پشتیبانی تصمیم گیری و سیاست گذاری هوشمند ; Springer: هایدلبرگ، آلمان، 2008; صص 73-91. [ Google Scholar ]
- چاکرابورتی، بی. هاشیموتو، تی. چارچوب محاسباتی برای انتخاب مسیر مبتنی بر ترجیح ذهنی در سیستم ناوبری عابر پیاده. در مجموعه مقالات کنفرانس TENCON 2011-2011 IEEE منطقه 10، بالی، اندونزی، 21-24 نوامبر 2011. صص 1144-1148. [ Google Scholar ]
- منگ، ال. هو، ز. هوانگ، سی. ژانگ، دبلیو. جیا، تی. روش انتخاب مسیر بهینه بر اساس پیچهای تقاطعهای جادهای: مطالعه موردی در حمل و نقل محموله بزرگ. ISPRS Int. J. Geo-Inf. 2015 ، 4 ، 2428. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- شرودر، سی جی; Mackaness، WA; Gittings، BM ارائه مسیر “درست”: الزامات برای سیستم های ناوبری عابر پیاده. ترانس. GIS 2011 ، 15 ، 419-438. [ Google Scholar ] [ CrossRef ]
- برونیه، تی تی; Collier، ZA; کانتلون، جی. هولمز، ای. چوب، MD; لینکوف، آی. تیلور، استراتژی های HA برای انتخاب مسیرها از طریق محیط های واقعی: توپوگرافی نسبی، صافی مسیر اولیه و جهت اصلی. PLoS ONE 2015 ، 10 ، e0124404. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- زو، اس. لوینسون، دی. آیا مردم از کوتاه ترین مسیر استفاده می کنند؟ یک آزمون تجربی از اصل اول Wardrop. PLoS ONE 2015 ، 10 ، e0134322. [ Google Scholar ] [ CrossRef ]
- مارشال، ما؛ Garrick، انواع شبکه خیابان NW و ایمنی جاده: مطالعه 24 شهر کالیفرنیا. شهری دس. بین المللی 2010 ، 15 ، 133-147. [ Google Scholar ] [ CrossRef ]
- یعقوب، ا. جینش، ک. آکارا، ج. Therattil، JP اثر هندسه بزرگراه روستایی بر بار کاری راننده: گامی به سوی ایمنی. در مجموعه مقالات روندهای نوظهور در مهندسی، علم و فناوری برای جامعه، انرژی و محیط زیست: مجموعه مقالات کنفرانس بین المللی در روندهای نوظهور در مهندسی، علم و فناوری (ICETEST 2018)، Thrissur، کرالا، هند، 18-20 ژانویه 2018؛ پ. 149. [ Google Scholar ] [ CrossRef ]
- گرین، پی. بار کاری راننده به عنوان تابعی از هندسه جاده: یک آزمایش آزمایشی. در دسترس به صورت آنلاین: https://deepblue.lib.umich.edu/bitstream/handle/2027.42/1046/86296.0001.001.pdf?sequence=2 (در 28 مارس 2018 قابل دسترسی است).
- هاینز، آر. جونز، ا. کندی، وی. هاروی، آی. جول، تی. تغییرات انحنای جاده در انگلستان و ولز و ارتباط آنها با تصادفات جاده ای. محیط زیست طرح. A 2007 , 39 , 1222-1237. [ Google Scholar ] [ CrossRef ]
- ژانگ، ی. بیگام، ج. راگلند، دی. چن، X. بررسی ارتباط بین ساختار شبکه جاده و تصادفات غیر موتوری. J. Transp. Geogr. 2014 ، 42 ، 34-47. [ Google Scholar ] [ CrossRef ]
- پاپینسکی، دی. اسکات، دی.م. Doherty، ST بررسی فرآیند تصمیم گیری انتخاب مسیر: مقایسه مسیرهای برنامه ریزی شده و مشاهده شده به دست آمده با استفاده از GPS مبتنی بر شخص. ترانسپ Res. قسمت F روانشناسی ترافیک. رفتار 2009 ، 12 ، 347-358. [ Google Scholar ] [ CrossRef ]
- کیم، اس. چوی، جی. Kim, Y. تعیین عرض پیاده رو با استفاده از سطوح ناراحتی عابر پیاده و ویژگی های حرکت. KSCE J. Civ. مهندس 2011 ، 15 ، 883-889. [ Google Scholar ] [ CrossRef ]
- اوزبیل، آ. آرگین، جی. Yesiltepe، D. انتخاب مسیر عابر پیاده توسط دانشآموزان مدارس ابتدایی: نقش پیکربندی شبکه خیابانی و ویژگیهای کیفی عابر پیاده در راه رفتن به مدرسه. بین المللی J. Des. ایجاد کنید. نوآوری. 2016 ، 4 ، 1-18. [ Google Scholar ] [ CrossRef ]
- D’Acci، L. ادراکات شناختی زیبایی شناختی از فرم خیابان شهری. ترجیحات عابر پیاده نسبت به اشکال مسیر مستقیم یا منحنی. J. Urban Des. 2019 ، 24 ، 1-17. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- Bailenson، JN; شوم، ام اس; Uttal، DH Road Climbing: اصول حاکم بر انتخاب مسیر نامتقارن در نقشه ها. جی. محیط زیست. روانی 1998 ، 18 ، 251-264. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- هلشر، سی. تنبرینک، تی. وینر، JM آیا شرح مسیر خود را دنبال می کنید؟ راهبردهای شناختی در برنامه ریزی مسیر شهری. شناخت 2011 ، 121 ، 228-247. [ Google Scholar ] [ CrossRef ]
- Hochmair، HH; کارلسون، وی. بررسی اولویت بین استراتژی حداقل زاویه و استراتژی بخش اولیه برای انتخاب مسیر در محیط های ناشناخته. در مجموعه مقالات کنفرانس بین المللی شناخت فضایی، باواریا، آلمان، 11-13 اکتبر 2004. صص 79-97. [ Google Scholar ]
- بیرن، حافظه RW برای جغرافیای شهری. QJ Exp. روانی 1979 ، 31 ، 147-154. [ Google Scholar ] [ CrossRef ]
- Montello، جهت گیری فضایی DR و زاویه دید مسیرهای شهری مطالعه میدانی. محیط زیست رفتار 1991 ، 23 ، 47-69. [ Google Scholar ] [ CrossRef ]
- لیو، بی. دونگ، دبلیو. زو، ال. لیو، اچ. Meng, L. استفاده از fMRI برای بررسی تأثیر الگوهای شبکه جادهای بر شناخت مکانی. Proc. بین المللی کارتوگر. دانشیار 2019 ، 2 ، 75. [ Google Scholar ] [ CrossRef ]
- جیانوپولوس، آی. راوبال، م. Duchowski، A. ردیابی چشم برای تحقیقات فضایی: شناخت، محاسبات، چالش ها. تف کردن شناخت. محاسبه کنید. 2017 ، 17 ، 1-19. [ Google Scholar ] [ CrossRef ]
- لیو، بی. دونگ، دبلیو. Meng, L. استفاده از ردیابی چشم برای کاوش در هدایت و پایداری متغیرهای بصری در تجسم سه بعدی. ISPRS Int. J. Geo-Inf. 2017 ، 6 ، 274. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- لیائو، اچ. دونگ، دبلیو. پنگ، سی. لیو، اچ. بررسی تفاوتهای توجه بصری در جهتیابی عابر پیاده هنگام استفاده از نقشههای دو بعدی و مرورگرهای جغرافیایی سه بعدی. کارتوگر. Geogr. Inf. علمی 2017 ، 44 ، 474-490. [ Google Scholar ] [ CrossRef ]
- اومز، ک. دی مایر، پ. فاک، وی. ون آسشه، ای. Witlox، F. تفسیر نقشه ها از دید کاربران متخصص و مبتدی. بین المللی جی. جئوگر. Inf. علمی 2012 ، 26 ، 1773-1788. [ Google Scholar ] [ CrossRef ]
- اندرسن، NE; دهمانی، ل. کونیشی، ک. Bohbot، VD Eye ردیابی، استراتژی ها و تفاوت های جنسی در ناوبری مجازی. نوروبیول. فرا گرفتن. مم 2012 ، 97 ، 81-89. [ Google Scholar ] [ CrossRef ]
- بائر، سی. اولمان، ام. لودویگ، ب. ارزیابی رابط های ناوبری عابر پیاده داخلی با استفاده از ردیابی چشم موبایل. 2016. موجود به صورت آنلاین: https://www.researchgate.net/publication/306123898_Evaluating_Indoor_Pedestrian_Navigation_Interfaces_Using_Mobile_Eye_Tracking (در 22 مه 2019 قابل دسترسی است).
- فوتیوس، اس. اوتلی، جی. چیل، سی. هارا، ن. استفاده از ردیابی چشم برای شناسایی وظایف بصری حیاتی عابران پیاده، قسمت 1. رویکرد وظیفه دوگانه. نورپردازی Res. تکنولوژی 2015 ، 47 ، 133-148. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- هپرل، ال. فون استولپناگل، R. رفتار نگاه در طول ناوبری تصادفی و عمدی در یک محیط بیرونی AU-Wenczel، Flora. تف کردن شناخت. محاسبه کنید. 2017 ، 17 ، 121-142. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- لیائو، اچ. دونگ، دبلیو. هوانگ، اچ. گارتنر، جی. لیو، اچ. استنتاج وظایف کاربر در مسیریابی عابر پیاده از دادههای حرکت چشم در محیطهای واقعی. بین المللی جی. جئوگر. Inf. علمی 2019 ، 33 ، 739–763. [ Google Scholar ] [ CrossRef ]
- کیتازاوا، ک. فوجیما، تی. دید عابر پیاده و رفتار اجتناب از برخورد: بررسی فضای فرآیند اطلاعاتی عابران پیاده با استفاده از ردیاب چشم . Springer: هایدلبرگ، آلمان، 2009; صص 95-108. [ Google Scholar ]
- ترفزگر، م. بلاشک، تی. راشکه، ام. هاسمن، اس. شلگل، تی. مقایسه بصری رفتار نگاه از عابران پیاده و دوچرخه سواران. در مجموعه مقالات ETRA 2018 – سمپوزیوم در مورد تحقیقات و کاربردهای ردیابی چشم، ورشو، لهستان، 14 ژوئن 2018؛ صص 1-5. [ Google Scholar ]
- جیانوپولوس، آی. کیفر، پ. Raubal, M. GazeNav: مسیریابی عابر پیاده مبتنی بر نگاه. در مجموعه مقالات هفدهمین کنفرانس بین المللی تعامل انسان و رایانه با دستگاه ها و خدمات موبایل، کپنهاگ، دانمارک، 24 تا 27 اوت 2015. صص 337-346. [ Google Scholar ]
- کیچین، آر. Blades, M. The Cognition of Geographic Space ; IBTauris: لندن، انگلستان، 2002; پ. 7. [ Google Scholar ]
- گولج، RG ماهیت دانش جغرافیایی. ان دانشیار صبح. Geogr. 2002 ، 92 ، 1-14. [ Google Scholar ] [ CrossRef ]
- گوگل. Google Maps JavaScript API. در دسترس آنلاین: https://developers.google.com/maps/documentation/javascript/tutorial (در 1 اکتبر 2017 قابل دسترسی است).
- دی کوک، ال. Viaene، P. اومز، ک. ون دی وگه، ن. مایکلز، آر. ولف، ا. Vanhaeren، N. De Maeyer, P. مقایسه دستورالعملهای مکتوب و مبتنی بر عکس مسیریابی در داخل ساختمان از طریق اقدامات تثبیت چشم و رتبهبندی کاربر به عنوان ارزیابی تلاش ذهنی. J. Eye Mov. Res. 2019 ، 12 ، 1. [ Google Scholar ]
- کولتکین، ا. هیل، بی. گارلاندینی، اس. Fabrikant، SI ارزیابی اثربخشی طراحی های رابط نقشه تعاملی: مطالعه موردی ادغام معیارهای قابلیت استفاده با تجزیه و تحلیل حرکت چشم. کارتوگر. Geogr. Inf. علمی 2009 ، 36 ، 5-17. [ Google Scholar ] [ CrossRef ]
- دونگ، دبلیو. لیائو، اچ. راث، RE; وانگ، اس. ردیابی چشم برای کشف پتانسیل نقشه های پایه تصویری پیشرفته در نقشه برداری وب. کارتوگر. J. 2014 ، 51 ، 313-329. [ Google Scholar ] [ CrossRef ]
- منسون، اس ام. Kne، L. دایک، KR; شانون، جی. Eria, S. استفاده از ردیابی چشم و معیارهای ماوس برای آزمایش قابلیت استفاده از مسیریابی نقشه وب. کارتوگر. Geogr. Inf. علمی 2012 ، 39 ، 48-60. [ Google Scholar ] [ CrossRef ]
- هلمکویست، ک. نیستروم، ام. اندرسون، آر. دیورست، آر. یارودزکا، اچ. Van de Weijer, J. Eye Tracking: A Comprehensive Guide to Methods and Measures ; OUP: آکسفورد، بریتانیا، 2011. [ Google Scholar ]
- برودرسن، ال. اندرسن، اچ. وبر، اس. استفاده از ردیابی حرکت چشم برای مطالعه درک نقشه و طراحی نقشه . سروی ملی و کاداستر: Norresundby، دانمارک، 2002.
- کاستنر، HW; ایستمن، پارامترهای حرکت چشم RJ و پیچیدگی نقشه درک شده – I. صبح. کارتوگر. 1984 ، 11 ، 107-117. [ Google Scholar ] [ CrossRef ]
- اولیویرا، دی. ماچین، ال. دلیزا، ر. روزنتال، ا. والتر، ای اچ. گیمنز، آ. آرس، جی. توجه مصرفکنندگان به برچسبهای مواد غذایی کاربردی: بینشهایی از ردیابی چشم و تشخیص تغییر در یک مطالعه موردی با شیر پروبیوتیک. LWT Food Sci. تکنولوژی 2016 ، 68 ، 160-167. [ Google Scholar ] [ CrossRef ]
- Hesselmann, G. استفاده از مدلهای خطی اثرات مختلط (LMMs) در طرحهای درون شرکتکننده با ارزیابیهای ذهنی مبتنی بر کارآزمایی آگاهی-یک هشدار. جلو. روانی 2018 ، 9 ، 788. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- سامیر، ا. بوشان، ب. اثر نوع نشانه بر حافظه مسیر در محیط همگن ناآشنا. روانی گل میخ. 2017 ، 62 ، 152-159. [ Google Scholar ] [ CrossRef ]
- لیائو، اچ. دونگ، دبلیو. یک مطالعه اکتشافی با بررسی اثرات جنسیتی در استفاده از نقشه های سه بعدی برای جهت گیری فضایی در مسیریابی. ISPRS Int. J. Geo-Inf. 2017 ، 6 ، 60. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- هیرتل، اس. ریشتر، KF; سرینیواس، اس. فرث، آر. این بخش دشوار است: وقتی مسیرها دشوار می شوند. جی. اسپات. Inf. علمی 2010 ، 1 ، 53-73. [ Google Scholar ]
- کیچین، آر. Blades, M. The Cognition of Geographic Space ; IBTauris: لندن، انگلستان، 2002; پ. 12. [ Google Scholar ]
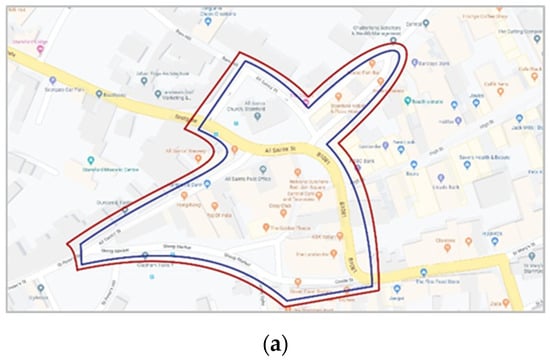

شکل 1. مناطق آزمایشی: ( الف ) استمفورد، لینکلن شایر و ( ب ) اشتون-آندر-لین، منچستر بزرگ. قرمز نشان دهنده ناحیه پیش آزمون و آبی نشان دهنده مناطق آزمایشی است. به شرکت کنندگان این نقشه ها ارائه نشد.
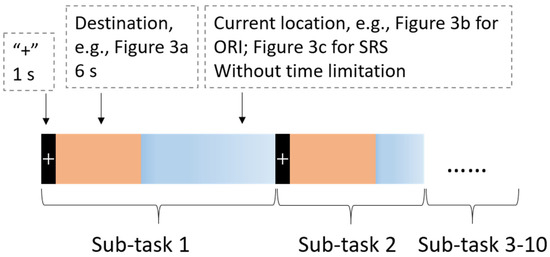
شکل 2. طراحی وظایف فرعی برای هر بخش.
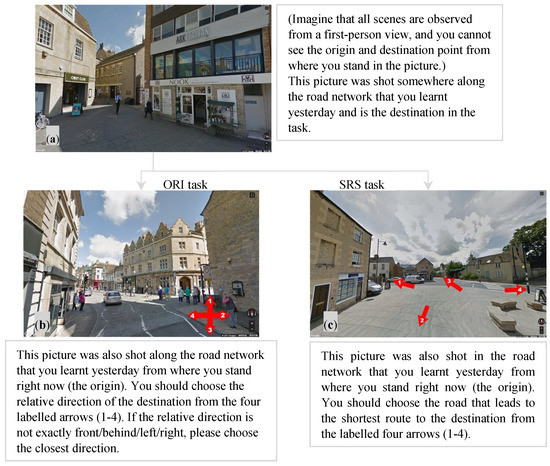
شکل 3. مثالی از محرک تجربی: ( الف ): مقصد; ( b ): موقعیت فعلی برای وظیفه جهت گیری (ORI). ( c ): موقعیت فعلی برای کار انتخاب کوتاهترین مسیر (SRS). وظایف در امتداد شکل ها در جعبه های متن خاکستری توضیح داده شده است.

شکل 4. مناطق مورد علاقه (AOI) مثال: قسمت زرد برچسب AOI و قسمت قرمز جاده AOI است.
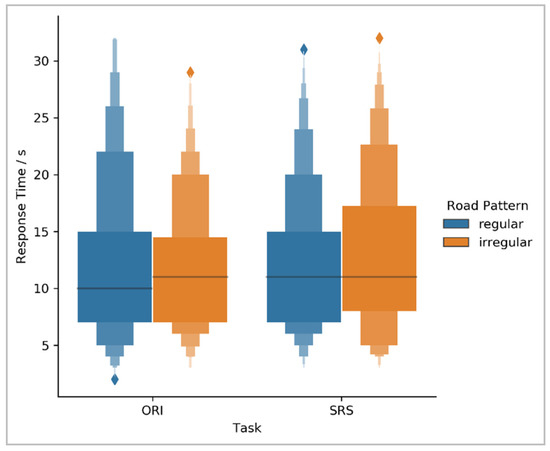
شکل 5. آمار زمان پاسخ.
شکل 6. آمار زمان تا اولین تثبیت در کار ORI: ( a ): گروه بندی شده بر اساس الگوی جاده و ( b ): گروه بندی بر اساس دسته AOI.
شکل 7. آمار میانگین مدت تثبیت در کار ORI: ( a ): گروه بندی شده بر اساس الگوی جاده و ( b ): گروه بندی شده بر اساس دسته AOI.
شکل 8. آمار تعداد تثبیت در کار ORI: ( a ): گروه بندی شده بر اساس الگوی جاده و ( b ): گروه بندی بر اساس دسته AOI.
شکل 9. آمار مدت زمان تثبیت در کار ORI: ( a ): گروه بندی شده بر اساس الگوی جاده و ( b ): گروه بندی بر اساس دسته AOI.
شکل 10. آمار زمان تا اولین تثبیت در کار SRS: ( a ): گروه بندی شده بر اساس الگوی جاده و ( b ): گروه بندی بر اساس دسته AOI.
شکل 11. آمار میانگین مدت تثبیت در کار SRS: ( a ): گروه بندی شده بر اساس الگوی جاده و ( b ): گروه بندی شده بر اساس دسته AOI.

شکل 12. آمار تعداد تثبیت در کار ORI: ( a ): گروه بندی شده بر اساس الگوی جاده و ( b ): گروه بندی بر اساس دسته AOI.
شکل 13. آمار مدت زمان تثبیت در کار SRS: ( a ): گروه بندی شده بر اساس الگوی جاده و ( b ): گروه بندی بر اساس دسته AOI.


بدون دیدگاه